Introduction to Mobile Robotics Probabilistic Sensor Models
|
|
|
- Vanessa Henderson
- 5 years ago
- Views:
Transcription


1 Introduction to Mobile Robotics Probabilistic Sensor Models Wolfram Burgard 1
2 Sensors for Mobile Robots Contact sensors: Bumpers Proprioceptive sensors Accelerometers (spring-mounted masses) Gyroscopes (spinning mass, laser light) Compasses, inclinometers (earth magnetic field, gravity) Proximity sensors Sonar (time of flight) Radar (phase and frequency) Laser range-finders (triangulation, tof, phase) Infrared (intensity) Visual sensors: Cameras Satellite-based sensors: GPS



3 Proximity Sensors The central task is to determine P( x), i.e., the probability of a measurement given that the robot is at position x. Question: Where do the probabilities come from? Approach: Let s try to explain a measurement. 3
4 Beam-based Sensor Model Scan consists of K measurements. =,,..., { 1 K } Individual measurements are independent given the robot position. P( x, m) = K k = 1 P( k x, m) 4
5 Beam-based Sensor Model P( x, m) = K k = 1 P( k x, m) 5

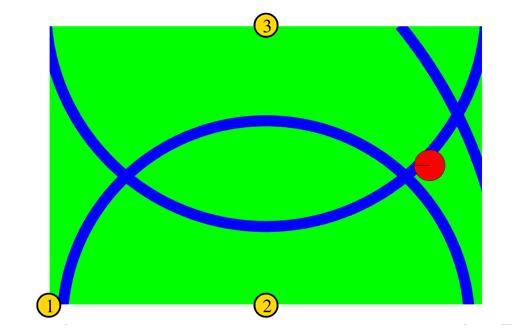
6 Typical Measurement Errors of an Range Measurements 1. Beams reflected by obstacles. Beams reflected by persons / caused by crosstalk 3. Random measurements 4. Maximum range measurements 6
7 Proximity Measurement Measurement can be caused by a known obstacle. cross-talk. an unexpected obstacle (people, furniture, ). missing all obstacles (total reflection, glass, ). Noise is due to uncertainty in measuring distance to known obstacle. in position of known obstacles. in position of additional obstacles. whether obstacle is missed. 7
8 Beam-based Proximity Model Measurement noise Unexpected obstacles 0 exp max 0 exp max P hit ( x, m) = η 1 πb e 1 ( b exp ) P unexp ( x, m) = λ η λ e < exp 0 otherwise 8
9 Beam-based Proximity Model Random measurement Max range 0 exp max 0 exp max P rand ( x, m) = η 1 max P max ( x, m) = η 1 small 9
10 10 Resulting Mixture Density = ), ( ), ( ), ( ), ( ), ( rand max unexp hit rand max unexp hit m x P m x P m x P m x P m x P T α α α α How can we determine the model parameters?


11 Raw Sensor Data Measured distances for expected distance of 300 cm. Sonar Laser 11
12 Approximation Maximie log likelihood of the data Search space of n-1 parameters. Hill climbing Gradient descent Genetic algorithms P( exp Deterministically compute the n-th parameter to satisfy normaliation constraint. ) 1
13 Approximation Results Laser Sonar 300cm 400cm
")

14 Example P( x,m) 14
15 Discrete Model of Proximity Sensors Instead of densities, consider discrete steps along the sensor beam. Laser sensor Sonar sensor 16

16 Approximation Results Laser Sonar 17
17 Influence of Angle to Obstacle "sonar-0"
18 Influence of Angle to Obstacle "sonar-1"
19 Influence of Angle to Obstacle "sonar-"
20 Influence of Angle to Obstacle "sonar-3"
21 Summary Beam-based Model Assumes independence between beams. Justification? Overconfident! Models physical causes for measurements. Mixture of densities for these causes. Assumes independence between causes. Problem? Implementation Learn parameters based on real data. Different models should be learned for different angles at which the sensor beam hits the obstacle. Determine expected distances by ray-tracing. Expected distances can be pre-processed.
22 Scan-based Model Beam-based model is not smooth for small obstacles and at edges. not very efficient. Idea: Instead of following along the beam, just check the end point. 3
23 Scan-based Model Probability is a mixture of a Gaussian distribution with mean at distance to closest obstacle, a uniform distribution for random measurements, and a small uniform distribution for max range measurements. Again, independence between different components is assumed. 4
")
24 Example Likelihood field Map m P( x,m) 5


25 San Jose Tech Museum Occupancy grid map Likelihood field 6

26 Scan Matching Extract likelihood field from scan and use it to match different scan. 7
27 Properties of Scan-based Model Highly efficient, uses D tables only. Distance grid is smooth w.r.t. to small changes in robot position. Allows gradient descent, scan matching. Ignores physical properties of beams. 9
28 Additional Models of Proximity Sensors Map matching (sonar, laser): generate small, local maps from sensor data and match local maps against global model. Scan matching (laser): map is represented by scan endpoints, match scan into this map. Features (sonar, laser, vision): Extract features such as doors, hallways from sensor data. 30
29 Landmarks Active beacons (e.g., radio, GPS) Passive (e.g., visual, retro-reflective) Standard approach is triangulation Sensor provides distance, or bearing, or distance and bearing. 31

30 Distance and Bearing 3
31 Probabilistic Model 1. Algorithm landmark_detection_model(,x,m): = i, d, α, x = x, y,θ. 3. dˆ = ( m x ( i) x) + ( m y ( i) y) ˆ α = atan( m ( i) y, m ( i) x) θ y x 4. p det prob( dˆ d, ε ) prob( ˆ α α, ε ) = d α 5. Return p det 33



32 Distributions 34
33 Distances Only x = ( a + d 1 d ) / a No Uncertainty y = ± ( d 1 x ) X a P 1 P d 1 d x P 1 =(0,0) P =(a,0) 35
34 Bearings Only No Uncertainty P α P D P 3 β D 3 α 3 D 1 D 1 P 1 1 α P 1 1 D Law of cosine 1 = cosα D D D 1 3 = = = cos( α) cos( β ) cos( α + β ) 36
35 Bearings Only With Uncertainty P P 3 P P 1 P 1 Most approaches attempt to find estimation mean. 37
36 Summary of Sensor Models Explicitly modeling uncertainty in sensing is key to robustness. In many cases, good models can be found by the following approach: 1. Determine parametric model of noise free measurement.. Analye sources of noise. 3. Add adequate noise to parameters (eventually mix in densities for noise). 4. Learn (and verify) parameters by fitting model to data. 5. Likelihood of measurement is given by probabilistically comparing the actual with the expected measurement. This holds for motion models as well. It is extremely important to be aware of the underlying assumptions! 38
Robots Autónomos. Depto. CCIA. 2. Bayesian Estimation and sensor models. Domingo Gallardo
 Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Local Probabilistic Models: Continuous Variable CPDs
 Local Probabilistic Models: Continuous Variable CPDs Sargur srihari@cedar.buffalo.edu 1 Topics 1. Simple discretizing loses continuity 2. Continuous Variable CPDs 3. Linear Gaussian Model Example of car
Local Probabilistic Models: Continuous Variable CPDs Sargur srihari@cedar.buffalo.edu 1 Topics 1. Simple discretizing loses continuity 2. Continuous Variable CPDs 3. Linear Gaussian Model Example of car
Manipulators. Robotics. Outline. Non-holonomic robots. Sensors. Mobile Robots
 Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Introduction to Mobile Robotics Information Gain-Based Exploration. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras
 Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Bayesian Methods / G.D. Hager S. Leonard
 Bayesian Methods Recall Robot Localization Given Sensor readings z 1, z 2,, z t = z 1:t Known control inputs u 0, u 1, u t = u 0:t Known model t+1 t, u t ) with initial 1 u 0 ) Known map z t t ) Compute
Bayesian Methods Recall Robot Localization Given Sensor readings z 1, z 2,, z t = z 1:t Known control inputs u 0, u 1, u t = u 0:t Known model t+1 t, u t ) with initial 1 u 0 ) Known map z t t ) Compute
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Sensors Fusion for Mobile Robotics localization. M. De Cecco - Robotics Perception and Action
 Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
Introduction to Mobile Robotics Probabilistic Motion Models
 Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? 2 Dynamic Bayesian Network for Controls,
Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard 1 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? 2 Dynamic Bayesian Network for Controls,
Simultaneous Localization and Mapping
 Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Particle Filters. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
EE Mobile Robots
 Electric Electronic Engineering Bogazici University December 27, 2017 Introduction Motion Sensing Absolute position measurement Environmental Sensing Introduction Motion Sensing Environmental Sensing Robot
Electric Electronic Engineering Bogazici University December 27, 2017 Introduction Motion Sensing Absolute position measurement Environmental Sensing Introduction Motion Sensing Environmental Sensing Robot
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
TSRT14: Sensor Fusion Lecture 9
 TSRT14: Sensor Fusion Lecture 9 Simultaneous localization and mapping (SLAM) Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 9 Gustaf Hendeby Spring 2018 1 / 28 Le 9: simultaneous localization and
TSRT14: Sensor Fusion Lecture 9 Simultaneous localization and mapping (SLAM) Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 9 Gustaf Hendeby Spring 2018 1 / 28 Le 9: simultaneous localization and
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
Probability: Review. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 robabilit: Review ieter Abbeel UC Berkele EECS Man slides adapted from Thrun Burgard and Fo robabilistic Robotics Wh probabilit in robotics? Often state of robot and state of its environment are unknown
robabilit: Review ieter Abbeel UC Berkele EECS Man slides adapted from Thrun Burgard and Fo robabilistic Robotics Wh probabilit in robotics? Often state of robot and state of its environment are unknown
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Mapping Earth s Surface Chapter 2 Section 3
 Mapping Earth s Surface Chapter 2 Section 3 Day 1 Objective I will understand maps can be used to find locations on Earth and to represent information about features on Earth s Surface I will understand
Mapping Earth s Surface Chapter 2 Section 3 Day 1 Objective I will understand maps can be used to find locations on Earth and to represent information about features on Earth s Surface I will understand
Bayesian Identity Clustering
 Bayesian Identity Clustering Simon JD Prince Department of Computer Science University College London James Elder Centre for Vision Research York University http://pvlcsuclacuk sprince@csuclacuk The problem
Bayesian Identity Clustering Simon JD Prince Department of Computer Science University College London James Elder Centre for Vision Research York University http://pvlcsuclacuk sprince@csuclacuk The problem
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Mobile Robots Localization
 Mobile Robots Localization Institute for Software Technology 1 Today s Agenda Motivation for Localization Odometry Odometry Calibration Error Model 2 Robotics is Easy control behavior perception modelling
Mobile Robots Localization Institute for Software Technology 1 Today s Agenda Motivation for Localization Odometry Odometry Calibration Error Model 2 Robotics is Easy control behavior perception modelling
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
Parameter Estimation. Industrial AI Lab.
 Parameter Estimation Industrial AI Lab. Generative Model X Y w y = ω T x + ε ε~n(0, σ 2 ) σ 2 2 Maximum Likelihood Estimation (MLE) Estimate parameters θ ω, σ 2 given a generative model Given observed
Parameter Estimation Industrial AI Lab. Generative Model X Y w y = ω T x + ε ε~n(0, σ 2 ) σ 2 2 Maximum Likelihood Estimation (MLE) Estimate parameters θ ω, σ 2 given a generative model Given observed
Distributed Intelligent Systems W4 An Introduction to Localization Methods for Mobile Robots
 Distributed Intelligent Systems W4 An Introduction to Localization Methods for Mobile Robots 1 Outline Positioning systems Indoor Outdoor Robot localization using proprioceptive sensors without uncertainties
Distributed Intelligent Systems W4 An Introduction to Localization Methods for Mobile Robots 1 Outline Positioning systems Indoor Outdoor Robot localization using proprioceptive sensors without uncertainties
Sensors and Actuators. Ioannis Rekleitis
 Sensors and Actuators Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch, weight, size,
Sensors and Actuators Ioannis Rekleitis Robot Sensors Sensors are devices that can sense and measure physical properties of the environment, e.g. temperature, luminance, resistance to touch, weight, size,
Kalman Filters for Mapping and Localization
 Kalman Filters for Mapping and Localization Sensors If you can t model the world, then sensors are the robot s link to the external world (obsession with depth) Laser Kinect IR rangefinder sonar rangefinder
Kalman Filters for Mapping and Localization Sensors If you can t model the world, then sensors are the robot s link to the external world (obsession with depth) Laser Kinect IR rangefinder sonar rangefinder
Visual Anomaly Detection from Small Samples for Mobile Robots. *The University of Tokyo, Japan Graduate School of Information Science and Technology
 Visual Anomaly Detection from Small Samples for Mobile Robots Hiroharu Kato*, Tatsuya Harada *,**, Yasuo Kuniyoshi* *The University of Tokyo, Japan Graduate School of Information Science and Technology
Visual Anomaly Detection from Small Samples for Mobile Robots Hiroharu Kato*, Tatsuya Harada *,**, Yasuo Kuniyoshi* *The University of Tokyo, Japan Graduate School of Information Science and Technology
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Sampling Based Filters
 Statistical Techniques in Robotics (16-831, F12) Lecture#03 (Monday September 5) Sampling Based Filters Lecturer: Drew Bagnell Scribes: M. Taylor, M. Shomin 1 1 Beam-based Sensor Model Many common sensors
Statistical Techniques in Robotics (16-831, F12) Lecture#03 (Monday September 5) Sampling Based Filters Lecturer: Drew Bagnell Scribes: M. Taylor, M. Shomin 1 1 Beam-based Sensor Model Many common sensors
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
Recursive Bayes Filtering
 Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Artificial Intelligence
 Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Vlad Estivill-Castro. Robots for People --- A project for intelligent integrated systems
 1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Gaussian with mean ( µ ) and standard deviation ( σ)
 and standard deviation ( σ)") Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters
 SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
Computer Vision Group Prof. Daniel Cremers. 14. Sampling Methods
 Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Sequence labeling. Taking collective a set of interrelated instances x 1,, x T and jointly labeling them
 HMM, MEMM and CRF 40-957 Special opics in Artificial Intelligence: Probabilistic Graphical Models Sharif University of echnology Soleymani Spring 2014 Sequence labeling aking collective a set of interrelated
HMM, MEMM and CRF 40-957 Special opics in Artificial Intelligence: Probabilistic Graphical Models Sharif University of echnology Soleymani Spring 2014 Sequence labeling aking collective a set of interrelated
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Your web browser (Safari 7) is out of date. For more security, comfort and the best experience on this site: Update your browser Ignore
 is out of date. For more security, comfort and the best experience on this site: Update your browser Ignore") Your web browser (Safari 7) is out of date. For more security, comfort and the best experience on this site: Update your browser Ignore ALTIMETER altitude meter For the complete encyclopedic entry with
Your web browser (Safari 7) is out of date. For more security, comfort and the best experience on this site: Update your browser Ignore ALTIMETER altitude meter For the complete encyclopedic entry with
Decision-making, inference, and learning theory. ECE 830 & CS 761, Spring 2016
 Decision-making, inference, and learning theory ECE 830 & CS 761, Spring 2016 1 / 22 What do we have here? Given measurements or observations of some physical process, we ask the simple question what do
Decision-making, inference, and learning theory ECE 830 & CS 761, Spring 2016 1 / 22 What do we have here? Given measurements or observations of some physical process, we ask the simple question what do
Localization of Radioactive Sources Zhifei Zhang
 Localization of Radioactive Sources Zhifei Zhang 4/13/2016 1 Outline Background and motivation Our goal and scenario Preliminary knowledge Related work Our approach and results 4/13/2016 2 Background and
Localization of Radioactive Sources Zhifei Zhang 4/13/2016 1 Outline Background and motivation Our goal and scenario Preliminary knowledge Related work Our approach and results 4/13/2016 2 Background and
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
Robotics. Lecture 4: Probabilistic Robotics. See course website for up to date information.
 Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics 2 Data Association. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Instrumentation Commande Architecture des Robots Evolués
 Instrumentation Commande Architecture des Robots Evolués Program 4a : Automatic Control, Robotics, Signal Processing Presentation General Orientation Research activities concern the modelling and control
Instrumentation Commande Architecture des Robots Evolués Program 4a : Automatic Control, Robotics, Signal Processing Presentation General Orientation Research activities concern the modelling and control
Pengju
 Introduction to AI Chapter04 Beyond Classical Search Pengju Ren@IAIR Outline Steepest Descent (Hill-climbing) Simulated Annealing Evolutionary Computation Non-deterministic Actions And-OR search Partial
Introduction to AI Chapter04 Beyond Classical Search Pengju Ren@IAIR Outline Steepest Descent (Hill-climbing) Simulated Annealing Evolutionary Computation Non-deterministic Actions And-OR search Partial
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Bayesian Machine Learning
 Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 2: Bayesian Basics https://people.orie.cornell.edu/andrew/orie6741 Cornell University August 25, 2016 1 / 17 Canonical Machine Learning
Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 2: Bayesian Basics https://people.orie.cornell.edu/andrew/orie6741 Cornell University August 25, 2016 1 / 17 Canonical Machine Learning
Lecture : Probabilistic Machine Learning
 Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
PILCO: A Model-Based and Data-Efficient Approach to Policy Search
 PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
Gradient Sampling for Improved Action Selection and Path Synthesis
 Gradient Sampling for Improved Action Selection and Path Synthesis Ian M. Mitchell Department of Computer Science The University of British Columbia November 2016 mitchell@cs.ubc.ca http://www.cs.ubc.ca/~mitchell
Gradient Sampling for Improved Action Selection and Path Synthesis Ian M. Mitchell Department of Computer Science The University of British Columbia November 2016 mitchell@cs.ubc.ca http://www.cs.ubc.ca/~mitchell
Vision for Mobile Robot Navigation: A Survey
 Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Lecture 8: Policy Gradient
 Lecture 8: Policy Gradient Hado van Hasselt Outline 1 Introduction 2 Finite Difference Policy Gradient 3 Monte-Carlo Policy Gradient 4 Actor-Critic Policy Gradient Introduction Vapnik s rule Never solve
Lecture 8: Policy Gradient Hado van Hasselt Outline 1 Introduction 2 Finite Difference Policy Gradient 3 Monte-Carlo Policy Gradient 4 Actor-Critic Policy Gradient Introduction Vapnik s rule Never solve
in Robotics Sebastian Thrun Carnegie Mellon University, Pittsburgh, USA Dieter Fox Wolfram Burgard Institut fur Informatik
 Probabilistic Methods for State Estimation in Robotics Sebastian Thrun Computer Science Department and Robotics Institute Carnegie Mellon University, Pittsburgh, USA http://www.cs.cmu.edu/thrun Dieter
Probabilistic Methods for State Estimation in Robotics Sebastian Thrun Computer Science Department and Robotics Institute Carnegie Mellon University, Pittsburgh, USA http://www.cs.cmu.edu/thrun Dieter
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
Planning With Information States: A Survey Term Project for cs397sml Spring 2002
 Planning With Information States: A Survey Term Project for cs397sml Spring 2002 Jason O Kane jokane@uiuc.edu April 18, 2003 1 Introduction Classical planning generally depends on the assumption that the
Planning With Information States: A Survey Term Project for cs397sml Spring 2002 Jason O Kane jokane@uiuc.edu April 18, 2003 1 Introduction Classical planning generally depends on the assumption that the
ECE521 week 3: 23/26 January 2017
 ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
Isobath following using an altimeter as a unique exteroceptive sensor
 Isobath following using an altimeter as a unique exteroceptive sensor Luc Jaulin Lab-STICC, ENSTA Bretagne, Brest, France lucjaulin@gmail.com Abstract. We consider an underwater robot equipped with an
Isobath following using an altimeter as a unique exteroceptive sensor Luc Jaulin Lab-STICC, ENSTA Bretagne, Brest, France lucjaulin@gmail.com Abstract. We consider an underwater robot equipped with an
Location Determination Technologies for Sensor Networks
 Location Determination Technologies for Sensor Networks Moustafa Youssef University of Maryland at College Park UMBC Talk March, 2007 Motivation Location is important: Determining the location of an event
Location Determination Technologies for Sensor Networks Moustafa Youssef University of Maryland at College Park UMBC Talk March, 2007 Motivation Location is important: Determining the location of an event
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
A Gentle Introduction to Reinforcement Learning
 A Gentle Introduction to Reinforcement Learning Alexander Jung 2018 1 Introduction and Motivation Consider the cleaning robot Rumba which has to clean the office room B329. In order to keep things simple,
A Gentle Introduction to Reinforcement Learning Alexander Jung 2018 1 Introduction and Motivation Consider the cleaning robot Rumba which has to clean the office room B329. In order to keep things simple,
Modeling Data with Linear Combinations of Basis Functions. Read Chapter 3 in the text by Bishop
 Modeling Data with Linear Combinations of Basis Functions Read Chapter 3 in the text by Bishop A Type of Supervised Learning Problem We want to model data (x 1, t 1 ),..., (x N, t N ), where x i is a vector
Modeling Data with Linear Combinations of Basis Functions Read Chapter 3 in the text by Bishop A Type of Supervised Learning Problem We want to model data (x 1, t 1 ),..., (x N, t N ), where x i is a vector
Mathematical Formulation of Our Example
 Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March Overview of dynamic control systems
 ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
ADVANCED MACHINE LEARNING ADVANCED MACHINE LEARNING. Non-linear regression techniques Part - II
 1 Non-linear regression techniques Part - II Regression Algorithms in this Course Support Vector Machine Relevance Vector Machine Support vector regression Boosting random projections Relevance vector
1 Non-linear regression techniques Part - II Regression Algorithms in this Course Support Vector Machine Relevance Vector Machine Support vector regression Boosting random projections Relevance vector
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Robot Localisation. Henrik I. Christensen. January 12, 2007
 Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Navigation Sensors Dr. Kostas Alexis (CSE) Navigation Sensors Providing the capacity to estimate the state of the aerial robot Self-Localize and estimate
CS491/691: Introduction to Aerial Robotics Topic: Navigation Sensors Dr. Kostas Alexis (CSE) Navigation Sensors Providing the capacity to estimate the state of the aerial robot Self-Localize and estimate
y Xw 2 2 y Xw λ w 2 2
 CS 189 Introduction to Machine Learning Spring 2018 Note 4 1 MLE and MAP for Regression (Part I) So far, we ve explored two approaches of the regression framework, Ordinary Least Squares and Ridge Regression:
CS 189 Introduction to Machine Learning Spring 2018 Note 4 1 MLE and MAP for Regression (Part I) So far, we ve explored two approaches of the regression framework, Ordinary Least Squares and Ridge Regression:
Probabilistic Machine Learning
 Probabilistic Machine Learning by Prof. Seungchul Lee isystes Design Lab http://isystes.unist.ac.kr/ UNIST Table of Contents I.. Probabilistic Linear Regression I... Maxiu Likelihood Solution II... Maxiu-a-Posteriori
Probabilistic Machine Learning by Prof. Seungchul Lee isystes Design Lab http://isystes.unist.ac.kr/ UNIST Table of Contents I.. Probabilistic Linear Regression I... Maxiu Likelihood Solution II... Maxiu-a-Posteriori
Reliability Monitoring Using Log Gaussian Process Regression
 COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
Autonomous Helicopter Flight via Reinforcement Learning
 Autonomous Helicopter Flight via Reinforcement Learning Authors: Andrew Y. Ng, H. Jin Kim, Michael I. Jordan, Shankar Sastry Presenters: Shiv Ballianda, Jerrolyn Hebert, Shuiwang Ji, Kenley Malveaux, Huy
Autonomous Helicopter Flight via Reinforcement Learning Authors: Andrew Y. Ng, H. Jin Kim, Michael I. Jordan, Shankar Sastry Presenters: Shiv Ballianda, Jerrolyn Hebert, Shuiwang Ji, Kenley Malveaux, Huy
Space of ML Problems. CSE 473: Artificial Intelligence. Parameter Estimation and Bayesian Networks. Learning Topics
 /7/7 CSE 73: Artfcal Intellgence Bayesan - Learnng Deter Fox Sldes adapted from Dan Weld, Jack Breese, Dan Klen, Daphne Koller, Stuart Russell, Andrew Moore & Luke Zettlemoyer What s Beng Learned? Space
/7/7 CSE 73: Artfcal Intellgence Bayesan - Learnng Deter Fox Sldes adapted from Dan Weld, Jack Breese, Dan Klen, Daphne Koller, Stuart Russell, Andrew Moore & Luke Zettlemoyer What s Beng Learned? Space
Topic 9 Potential fields: Follow your potential
 Topic 9 Potential fields: Follow your potential Path Planning B: Goal Find intermediate poses forming a path to the goal ) How can we find such paths? 2) Define pose and controls? Path on a graph: vertices
Topic 9 Potential fields: Follow your potential Path Planning B: Goal Find intermediate poses forming a path to the goal ) How can we find such paths? 2) Define pose and controls? Path on a graph: vertices
Probabilistic Machine Learning. Industrial AI Lab.
 Probabilistic Machine Learning Industrial AI Lab. Probabilistic Linear Regression Outline Probabilistic Classification Probabilistic Clustering Probabilistic Dimension Reduction 2 Probabilistic Linear
Probabilistic Machine Learning Industrial AI Lab. Probabilistic Linear Regression Outline Probabilistic Classification Probabilistic Clustering Probabilistic Dimension Reduction 2 Probabilistic Linear
MLPR: Logistic Regression and Neural Networks
 MLPR: Logistic Regression and Neural Networks Machine Learning and Pattern Recognition Amos Storkey Amos Storkey MLPR: Logistic Regression and Neural Networks 1/28 Outline 1 Logistic Regression 2 Multi-layer
MLPR: Logistic Regression and Neural Networks Machine Learning and Pattern Recognition Amos Storkey Amos Storkey MLPR: Logistic Regression and Neural Networks 1/28 Outline 1 Logistic Regression 2 Multi-layer
Outline. MLPR: Logistic Regression and Neural Networks Machine Learning and Pattern Recognition. Which is the correct model? Recap.
 Outline MLPR: and Neural Networks Machine Learning and Pattern Recognition 2 Amos Storkey Amos Storkey MLPR: and Neural Networks /28 Recap Amos Storkey MLPR: and Neural Networks 2/28 Which is the correct
Outline MLPR: and Neural Networks Machine Learning and Pattern Recognition 2 Amos Storkey Amos Storkey MLPR: and Neural Networks /28 Recap Amos Storkey MLPR: and Neural Networks 2/28 Which is the correct
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CSE446: Clustering and EM Spring 2017
 CSE446: Clustering and EM Spring 2017 Ali Farhadi Slides adapted from Carlos Guestrin, Dan Klein, and Luke Zettlemoyer Clustering systems: Unsupervised learning Clustering Detect patterns in unlabeled
CSE446: Clustering and EM Spring 2017 Ali Farhadi Slides adapted from Carlos Guestrin, Dan Klein, and Luke Zettlemoyer Clustering systems: Unsupervised learning Clustering Detect patterns in unlabeled
Lecture 6: CS395T Numerical Optimization for Graphics and AI Line Search Applications
 Lecture 6: CS395T Numerical Optimization for Graphics and AI Line Search Applications Qixing Huang The University of Texas at Austin huangqx@cs.utexas.edu 1 Disclaimer This note is adapted from Section
Lecture 6: CS395T Numerical Optimization for Graphics and AI Line Search Applications Qixing Huang The University of Texas at Austin huangqx@cs.utexas.edu 1 Disclaimer This note is adapted from Section
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Introduction to Mobile Robotics Compact Course on Linear Algebra. Wolfram Burgard, Bastian Steder
 Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Bastian Steder Reference Book Thrun, Burgard, and Fox: Probabilistic Robotics Vectors Arrays of numbers Vectors represent
Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Bastian Steder Reference Book Thrun, Burgard, and Fox: Probabilistic Robotics Vectors Arrays of numbers Vectors represent
Model Selection for Gaussian Processes
 Institute for Adaptive and Neural Computation School of Informatics,, UK December 26 Outline GP basics Model selection: covariance functions and parameterizations Criteria for model selection Marginal
Institute for Adaptive and Neural Computation School of Informatics,, UK December 26 Outline GP basics Model selection: covariance functions and parameterizations Criteria for model selection Marginal
Neural networks: Unsupervised learning
 Neural networks: Unsupervised learning 1 Previously The supervised learning paradigm: given example inputs x and target outputs t learning the mapping between them the trained network is supposed to give
Neural networks: Unsupervised learning 1 Previously The supervised learning paradigm: given example inputs x and target outputs t learning the mapping between them the trained network is supposed to give
Machine Learning
 Machine Learning 10-701 Tom M. Mitchell Machine Learning Department Carnegie Mellon University February 1, 2011 Today: Generative discriminative classifiers Linear regression Decomposition of error into
Machine Learning 10-701 Tom M. Mitchell Machine Learning Department Carnegie Mellon University February 1, 2011 Today: Generative discriminative classifiers Linear regression Decomposition of error into