Introduction to Mobile Robotics Probabilistic Motion Models
|
|
|
- Miranda Cox
- 5 years ago
- Views:
Transcription


1 Introduction to Mobile Robotics Probabilistic Motion Models Wolfram Burgard 1


2 Robot Motion Robot motion is inherently uncertain. How can we model this uncertainty? 2

3 Dynamic Bayesian Network for Controls, States, and Sensations 3
4 Probabilistic Motion Models To implement the Bayes Filter, we need the transition model. The term specifies a posterior probability, that action u t carries the robot from x t-1 to x t. In this section we will discuss, how can be modeled based on the motion equations and the uncertain outcome of the movements. 4
5 Coordinate Systems The configuration of a typical wheeled robot in 3D can be described by six parameters. This are the three-dimensional Cartesian coordinates plus the three Euler angles for roll, pitch, and yaw. For simplicity, throughout this section we consider robots operating on a planar surface. The state space of such systems is threedimensional (x,y,θ). 5
6 Typical Motion Models In practice, one often finds two types of motion models: Odometry-based Velocity-based (dead reckoning) Odometry-based models are used when systems are equipped with wheel encoders. Velocity-based models have to be applied when no wheel encoders are given. They calculate the new pose based on the velocities and the time elapsed. 6


7 Example Wheel Encoders These modules provide +5V output when they "see" white, and a 0V output when they "see" black. These disks are manufactured out of high quality laminated color plastic to offer a very crisp black to white transition. This enables a wheel encoder sensor to easily see the transitions. Source: 7

8 Dead Reckoning Derived from deduced reckoning. Mathematical procedure for determining the present location of a vehicle. Achieved by calculating the current pose of the vehicle based on its velocities and the time elapsed. Historically used to log the position of ships. [Image source: Wikipedia, LoKiLeCh] 8
9 Reasons for Motion Errors of Wheeled Robots ideal case different wheel diameters bump and many more carpet 9
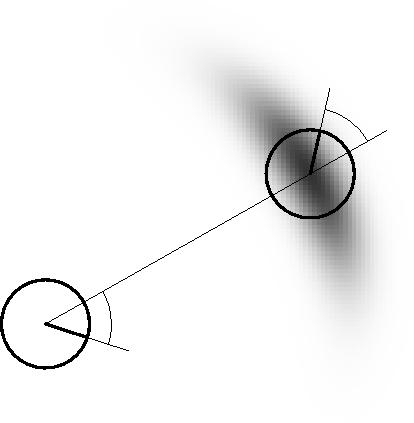
10 Odometry Model Robot moves from x, y,θ to x', y', θ '. Odometry information u = δ δ, δ., rot1 rot 2 trans δ trans = 2 ( x' x) + ( y' y δ = atan2( y' y, x' ) θ δ rot1 x = θ θ δ rot 2 ' rot1 ) 2 δ rot 2 x', y', θ ' x, y,θ δ rot1 δ trans
11 The atan2 Function Extends the inverse tangent and correctly copes with the signs of x and y. 11
12 Noise Model for Odometry The measured motion is given by the true motion corrupted with noise. ˆ δ rot1 = δ rot1 + ε α 1 δ rot1 + α 2 ˆ ˆ = + δ rot 2 = δ rot 2 + ε α 1 δ rot 2 + α 2 δ trans δ trans δtrans ε α 3 δtrans + α 4 ( δ rot1 + δ rot 2 ) δ trans
13 Typical Distributions for Probabilistic Motion Models ) ( σ σ πσ ε x e x = > = x 0 if ) ( 2 σ σ σ ε σ x x Normal distribution Triangular distribution
14 Calculating the Probability Density (zero-centered) For a normal distribution query point 1. Algorithm prob_normal_distribution(a,b): 2. return std. deviation For a triangular distribution 1. Algorithm prob_triangular_distribution(a,b): 2. return 14
15 Calculating the Posterior Given x, x, and Odometry hypotheses odometry 1. Algorithm motion_model_odometry(x, x,u) δtrans = ( x' x) + ( y' y) δ rot1 = atan2( y' y, x' x) θ δ rot 2 = θ ' θ δ rot1 ˆ 2 2 δtrans = ( x' x) + ( y' y) ˆ δ rot 1 = atan2( y' y, x' x) θ ˆ δ ˆ rot 2 = θ ' θ δ rot 1 p ˆ 1 = prob( δ rot1 δ rot1, α1 δ rot1 + α 2δ trans) p = prob( δ ˆ trans δ trans, α3δ trans + α 4( δ rot1 + p = prob( δ ˆ δ, α δ + α ) 2 δ rot2 3 rot2 rot2 1 rot2 2δ trans 11. return p 1 p 2 p 3 odometry params (u) values of interest (x,x ) )) 15

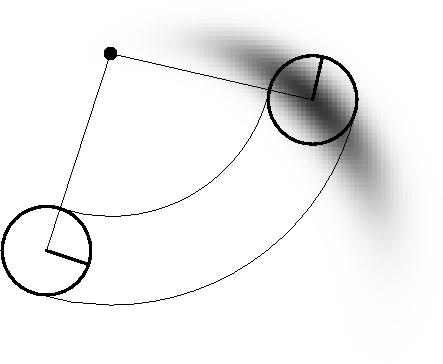
16 Application Repeated application of the motion model for short movements. Typical banana-shaped distributions obtained for the 2d-projection of the 3d posterior. x u x u
17 Sample-Based Density Representation
18 Sample-Based Density Representation 18
19 How to Sample from a Normal Distribution? Sampling from a normal distribution 1. Algorithm sample_normal_distribution(b): 2. return 19
20 Normally Distributed Samples 10 6 samples 20
21 How to Sample from Normal or Triangular Distributions? Sampling from a normal distribution 1. Algorithm sample_normal_distribution(b): 2. return Sampling from a triangular distribution 1. Algorithm sample_triangular_distribution(b): 2. return 21

22 For Triangular Distribution 10 3 samples 10 4 samples 10 5 samples 10 6 samples 22
23 How to Obtain Samples from Arbitrary Functions? 23
24 Rejection Sampling Sampling from arbitrary distributions Sample x from a uniform distribution from [-b,b] Sample c from [0, max f] if f(x) > c keep the sample otherwise reject the sample c x f(x) x f(x ) c OK 24
: 2. repeat 3. 4. 5. until ( ) 6.")
25 Rejection Sampling Sampling from arbitrary distributions 1. Algorithm sample_distribution(f,b): 2. repeat until ( ) 6. return 25

26 Example Sampling from 26
27 Sample Odometry Motion Model 1. Algorithm sample_motion_model(u, x): u = δ, δ, rot 1 rot 2 δtrans, x = x, y, θ ˆ δ rot1 = δ rot1 + sample( α1 δ rot1 + α 2 δtrans ) ˆ δ trans = δtrans + sample( α δtrans + α 4 ( δ rot1 + δ ˆ δ = δ + sample( α δ + α δ ) 3 rot 2 rot 2 rot 2 1 rot 2 2 trans )) x y = x +δ ˆ cos( ˆ trans θ + δ y +δ ˆ sin( θ + ˆ δ ' rot1 ' = trans rot1 θ ' = θ + ˆ δ ˆ rot + δ 1 rot 2 ) ) sample_normal_distribution 7. Return x', y', θ '

28 Examples (Odometry-Based)
29 Sampling from Our Motion Model Start
30 Velocity-Based Model θ-90 30
31 Noise Model for the Velocity- Based Model The measured motion is given by the true motion corrupted with noise. vˆ ˆ = v + ε α v + α ω 1 2 ω = ω + ε α v + α ω 3 4 Discussion: What is the disadvantage of this noise model? 31
32 Noise Model for the Velocity- Based Model The ( vˆ, ˆ) ω -circle constrains the final orientation (2D manifold in a 3D space) Better approach: vˆ ˆ ˆ = v + ε α v + α ω 1 2 ω = ω + ε α v + α ω γ = ε α 5 v + α6 ω 3 4 Term to account for the final rotation 32
33 Motion Including 3 rd Parameter Term to account for the final rotation 33
34 Equation for the Velocity Model Center of circle: some constant (distance to ICC) (center of circle is orthogonal to the initial heading) 34
35 Equation for the Velocity Model Center of circle: some constant some constant (the center of the circle lies on a ray half way between x and x and is orthogonal to the line between x and x ) 35
36 Equation for the Velocity Model Center of circle: some constant Allows us to solve the equations to: 36
37 Equation for the Velocity Model and 37
38 Equation for the Velocity Model The parameters of the circle: allow for computing the velocities as 38
39 Posterior Probability for Velocity Model 39
40 Sampling from Velocity Model 40

41 Examples (Velocity-Based)
42 Map-Consistent Motion Model p( x' u, x) p( x' u, x, m) Approximation: p( x' u, x, m) = η p( x' m) p( x' u, x)
43 Summary We discussed motion models for odometry-based and velocity-based systems We discussed ways to calculate the posterior probability p(x x, u). We also described how to sample from p(x x, u). Typically the calculations are done in fixed time intervals t. In practice, the parameters of the models have to be learned. We also discussed how to improve this motion model to take the map into account. 43
Motion Models (cont) 1 2/15/2012
 1 2/15/2012") Motion Models (cont 1 Odometry Motion Model the key to computing p( xt ut, xt 1 for the odometry motion model is to remember that the robot has an internal estimate of its pose θ x t 1 x y θ θ true poses
Motion Models (cont 1 Odometry Motion Model the key to computing p( xt ut, xt 1 for the odometry motion model is to remember that the robot has an internal estimate of its pose θ x t 1 x y θ θ true poses
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors
 Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
Mobile Robots Localization
 Mobile Robots Localization Institute for Software Technology 1 Today s Agenda Motivation for Localization Odometry Odometry Calibration Error Model 2 Robotics is Easy control behavior perception modelling
Mobile Robots Localization Institute for Software Technology 1 Today s Agenda Motivation for Localization Odometry Odometry Calibration Error Model 2 Robotics is Easy control behavior perception modelling
Localization. Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman
 Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Localization Howie Choset Adapted from slides by Humphrey Hu, Trevor Decker, and Brad Neuman Localization General robotic task Where am I? Techniques generalize to many estimation tasks System parameter
Introduction to Mobile Robotics Probabilistic Robotics
 Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
Introduction to Mobile Robotics Probabilistic Robotics Wolfram Burgard 1 Probabilistic Robotics Key idea: Explicit representation of uncertainty (using the calculus of probability theory) Perception Action
5.3.2 Sampling Algorithm RobotMotion
 122 5 RobotMotion (a) (b) (c) Figure 5.3 The velocity motion model, for different noise parameter settings. The function prob(x, b 2 ) models the motion error. It computes the probability of its parameter
122 5 RobotMotion (a) (b) (c) Figure 5.3 The velocity motion model, for different noise parameter settings. The function prob(x, b 2 ) models the motion error. It computes the probability of its parameter
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Probabilistic Sensor Models
 Introduction to Mobile Robotics Probabilistic Sensor Models Wolfram Burgard 1 Sensors for Mobile Robots Contact sensors: Bumpers Proprioceptive sensors Accelerometers (spring-mounted masses) Gyroscopes
Introduction to Mobile Robotics Probabilistic Sensor Models Wolfram Burgard 1 Sensors for Mobile Robots Contact sensors: Bumpers Proprioceptive sensors Accelerometers (spring-mounted masses) Gyroscopes
Robotics. Lecture 4: Probabilistic Robotics. See course website for up to date information.
 Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Introduction to Mobile Robotics Information Gain-Based Exploration. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras
 Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Statistical learning. Chapter 20, Sections 1 4 1
 Statistical learning Chapter 20, Sections 1 4 Chapter 20, Sections 1 4 1 Outline Bayesian learning Maximum a posteriori and maximum likelihood learning Bayes net learning ML parameter learning with complete
Statistical learning Chapter 20, Sections 1 4 Chapter 20, Sections 1 4 1 Outline Bayesian learning Maximum a posteriori and maximum likelihood learning Bayes net learning ML parameter learning with complete
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles
 Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Sheet 5 solutions. August 15, 2017
 Sheet 5 solutions August 15, 2017 Exercise 1: Sampling Implement three functions in Python which generate samples of a normal distribution N (µ, σ 2 ). The input parameters of these functions should be
Sheet 5 solutions August 15, 2017 Exercise 1: Sampling Implement three functions in Python which generate samples of a normal distribution N (µ, σ 2 ). The input parameters of these functions should be
Statistical learning. Chapter 20, Sections 1 3 1
 Statistical learning Chapter 20, Sections 1 3 Chapter 20, Sections 1 3 1 Outline Bayesian learning Maximum a posteriori and maximum likelihood learning Bayes net learning ML parameter learning with complete
Statistical learning Chapter 20, Sections 1 3 Chapter 20, Sections 1 3 1 Outline Bayesian learning Maximum a posteriori and maximum likelihood learning Bayes net learning ML parameter learning with complete
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters
 SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Robot Control Basics CS 685
 Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION. NA568 Mobile Robotics: Methods & Algorithms
 L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
L03. PROBABILITY REVIEW II COVARIANCE PROJECTION NA568 Mobile Robotics: Methods & Algorithms Today s Agenda State Representation and Uncertainty Multivariate Gaussian Covariance Projection Probabilistic
Cinematica dei Robot Mobili su Ruote. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Cinematica dei Robot Mobili su Ruote Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Riferimenti bibliografici Roland SIEGWART, Illah R. NOURBAKHSH Introduction to Autonomous Mobile
Cinematica dei Robot Mobili su Ruote Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Riferimenti bibliografici Roland SIEGWART, Illah R. NOURBAKHSH Introduction to Autonomous Mobile
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
Distributed Intelligent Systems W4 An Introduction to Localization Methods for Mobile Robots
 Distributed Intelligent Systems W4 An Introduction to Localization Methods for Mobile Robots 1 Outline Positioning systems Indoor Outdoor Robot localization using proprioceptive sensors without uncertainties
Distributed Intelligent Systems W4 An Introduction to Localization Methods for Mobile Robots 1 Outline Positioning systems Indoor Outdoor Robot localization using proprioceptive sensors without uncertainties
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
EE565:Mobile Robotics Lecture 6
 EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
Mathematical Formulation of Our Example
 Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Statistical learning. Chapter 20, Sections 1 3 1
 Statistical learning Chapter 20, Sections 1 3 Chapter 20, Sections 1 3 1 Outline Bayesian learning Maximum a posteriori and maximum likelihood learning Bayes net learning ML parameter learning with complete
Statistical learning Chapter 20, Sections 1 3 Chapter 20, Sections 1 3 1 Outline Bayesian learning Maximum a posteriori and maximum likelihood learning Bayes net learning ML parameter learning with complete
Probabilistic Robotics. Slides from Autonomous Robots (Siegwart and Nourbaksh), Chapter 5 Probabilistic Robotics (S. Thurn et al.
, Chapter 5 Probabilistic Robotics (S. Thurn et al.") robabilistic Robotics Slides from Autonomous Robots Siegwart and Nourbaksh Chapter 5 robabilistic Robotics S. Thurn et al. Today Overview of probability Representing uncertainty ropagation of uncertainty
robabilistic Robotics Slides from Autonomous Robots Siegwart and Nourbaksh Chapter 5 robabilistic Robotics S. Thurn et al. Today Overview of probability Representing uncertainty ropagation of uncertainty
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
Inertial Odometry using AR Drone s IMU and calculating measurement s covariance
 Inertial Odometry using AR Drone s IMU and calculating measurement s covariance Welcome Lab 6 Dr. Ahmad Kamal Nasir 25.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to AR-Drone On-board
Inertial Odometry using AR Drone s IMU and calculating measurement s covariance Welcome Lab 6 Dr. Ahmad Kamal Nasir 25.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to AR-Drone On-board
PILCO: A Model-Based and Data-Efficient Approach to Policy Search
 PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
Local Probabilistic Models: Continuous Variable CPDs
 Local Probabilistic Models: Continuous Variable CPDs Sargur srihari@cedar.buffalo.edu 1 Topics 1. Simple discretizing loses continuity 2. Continuous Variable CPDs 3. Linear Gaussian Model Example of car
Local Probabilistic Models: Continuous Variable CPDs Sargur srihari@cedar.buffalo.edu 1 Topics 1. Simple discretizing loses continuity 2. Continuous Variable CPDs 3. Linear Gaussian Model Example of car
Robot Localisation. Henrik I. Christensen. January 12, 2007
 Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
Learning with Probabilities
 Learning with Probabilities CS194-10 Fall 2011 Lecture 15 CS194-10 Fall 2011 Lecture 15 1 Outline Bayesian learning eliminates arbitrary loss functions and regularizers facilitates incorporation of prior
Learning with Probabilities CS194-10 Fall 2011 Lecture 15 CS194-10 Fall 2011 Lecture 15 1 Outline Bayesian learning eliminates arbitrary loss functions and regularizers facilitates incorporation of prior
Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements
 Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
the robot in its current estimated position and orientation (also include a point at the reference point of the robot)
") CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
Particle lter for mobile robot tracking and localisation
 Particle lter for mobile robot tracking and localisation Tinne De Laet K.U.Leuven, Dept. Werktuigkunde 19 oktober 2005 Particle lter 1 Overview Goal Introduction Particle lter Simulations Particle lter
Particle lter for mobile robot tracking and localisation Tinne De Laet K.U.Leuven, Dept. Werktuigkunde 19 oktober 2005 Particle lter 1 Overview Goal Introduction Particle lter Simulations Particle lter
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
Dynamic models 1 Kalman filters, linearization,
 Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Fuzzy Logic Based Nonlinear Kalman Filter Applied to Mobile Robots Modelling
 Fuzzy Logic Based Nonlinear Kalman Filter Applied to Mobile Robots Modelling Rodrigo Carrasco Sch. Department of Electrical Engineering Pontificia Universidad Católica de Chile, CHILE E-mail: rax@ing.puc.cl
Fuzzy Logic Based Nonlinear Kalman Filter Applied to Mobile Robots Modelling Rodrigo Carrasco Sch. Department of Electrical Engineering Pontificia Universidad Católica de Chile, CHILE E-mail: rax@ing.puc.cl
Bayesian Methods in Artificial Intelligence
 WDS'10 Proceedings of Contributed Papers, Part I, 25 30, 2010. ISBN 978-80-7378-139-2 MATFYZPRESS Bayesian Methods in Artificial Intelligence M. Kukačka Charles University, Faculty of Mathematics and Physics,
WDS'10 Proceedings of Contributed Papers, Part I, 25 30, 2010. ISBN 978-80-7378-139-2 MATFYZPRESS Bayesian Methods in Artificial Intelligence M. Kukačka Charles University, Faculty of Mathematics and Physics,
Recursive Bayes Filtering
 Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
(1) Introduction to Bayesian statistics
 Introduction to Bayesian statistics") Spring, 2018 A motivating example Student 1 will write down a number and then flip a coin If the flip is heads, they will honestly tell student 2 if the number is even or odd If the flip is tails, they
Spring, 2018 A motivating example Student 1 will write down a number and then flip a coin If the flip is heads, they will honestly tell student 2 if the number is even or odd If the flip is tails, they
Localización Dinámica de Robots Móviles Basada en Filtrado de Kalman y Triangulación
 Universidad Pública de Navarra 13 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Localización Dinámica de Robots Móviles Basada en Filtrado de Kalman y Triangulación
Universidad Pública de Navarra 13 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Localización Dinámica de Robots Móviles Basada en Filtrado de Kalman y Triangulación
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
Bayesian RL Seminar. Chris Mansley September 9, 2008
 Bayesian RL Seminar Chris Mansley September 9, 2008 Bayes Basic Probability One of the basic principles of probability theory, the chain rule, will allow us to derive most of the background material in
Bayesian RL Seminar Chris Mansley September 9, 2008 Bayes Basic Probability One of the basic principles of probability theory, the chain rule, will allow us to derive most of the background material in
Cheng Soon Ong & Christian Walder. Canberra February June 2018
 Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 (Many figures from C. M. Bishop, "Pattern Recognition and ") 1of 143 Part IV
Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 (Many figures from C. M. Bishop, "Pattern Recognition and ") 1of 143 Part IV
Vlad Estivill-Castro. Robots for People --- A project for intelligent integrated systems
 1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Simultaneous Localization and Mapping
 Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Bayesian Inference and MCMC
 Bayesian Inference and MCMC Aryan Arbabi Partly based on MCMC slides from CSC412 Fall 2018 1 / 18 Bayesian Inference - Motivation Consider we have a data set D = {x 1,..., x n }. E.g each x i can be the
Bayesian Inference and MCMC Aryan Arbabi Partly based on MCMC slides from CSC412 Fall 2018 1 / 18 Bayesian Inference - Motivation Consider we have a data set D = {x 1,..., x n }. E.g each x i can be the
ADVANCED MACHINE LEARNING ADVANCED MACHINE LEARNING. Non-linear regression techniques Part - II
 1 Non-linear regression techniques Part - II Regression Algorithms in this Course Support Vector Machine Relevance Vector Machine Support vector regression Boosting random projections Relevance vector
1 Non-linear regression techniques Part - II Regression Algorithms in this Course Support Vector Machine Relevance Vector Machine Support vector regression Boosting random projections Relevance vector
Chapter 2 Homogeneous Transformation Matrix
 Chapter 2 Homogeneous Transformation Matrix Abstract The transformation of frames is a fundamental concept in the modeling and programming of a robot. In this Chapter, we present a notation that allows
Chapter 2 Homogeneous Transformation Matrix Abstract The transformation of frames is a fundamental concept in the modeling and programming of a robot. In this Chapter, we present a notation that allows
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
An Embedded Implementation of Bayesian Network Robot Programming Methods
 1 An Embedded Implementation of Bayesian Network Robot Programming Methods By Mark A. Post Lecturer, Space Mechatronic Systems Technology Laboratory. Department of Design, Manufacture and Engineering Management.
1 An Embedded Implementation of Bayesian Network Robot Programming Methods By Mark A. Post Lecturer, Space Mechatronic Systems Technology Laboratory. Department of Design, Manufacture and Engineering Management.
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization
 A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
A Comparison of the EKF, SPKF, and the Bayes Filter for Landmark-Based Localization and Timothy D. Barfoot CRV 2 Outline Background Objective Experimental Setup Results Discussion Conclusion 2 Outline
Bayesian Methods / G.D. Hager S. Leonard
 Bayesian Methods Recall Robot Localization Given Sensor readings z 1, z 2,, z t = z 1:t Known control inputs u 0, u 1, u t = u 0:t Known model t+1 t, u t ) with initial 1 u 0 ) Known map z t t ) Compute
Bayesian Methods Recall Robot Localization Given Sensor readings z 1, z 2,, z t = z 1:t Known control inputs u 0, u 1, u t = u 0:t Known model t+1 t, u t ) with initial 1 u 0 ) Known map z t t ) Compute
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen. Bayesian Learning. Tobias Scheffer, Niels Landwehr
 Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning Tobias Scheffer, Niels Landwehr Remember: Normal Distribution Distribution over x. Density function with parameters
Universität Potsdam Institut für Informatik Lehrstuhl Maschinelles Lernen Bayesian Learning Tobias Scheffer, Niels Landwehr Remember: Normal Distribution Distribution over x. Density function with parameters
Series 7, May 22, 2018 (EM Convergence)
") Exercises Introduction to Machine Learning SS 2018 Series 7, May 22, 2018 (EM Convergence) Institute for Machine Learning Dept. of Computer Science, ETH Zürich Prof. Dr. Andreas Krause Web: https://las.inf.ethz.ch/teaching/introml-s18
Exercises Introduction to Machine Learning SS 2018 Series 7, May 22, 2018 (EM Convergence) Institute for Machine Learning Dept. of Computer Science, ETH Zürich Prof. Dr. Andreas Krause Web: https://las.inf.ethz.ch/teaching/introml-s18
Reasoning Under Uncertainty Over Time. CS 486/686: Introduction to Artificial Intelligence
 Reasoning Under Uncertainty Over Time CS 486/686: Introduction to Artificial Intelligence 1 Outline Reasoning under uncertainty over time Hidden Markov Models Dynamic Bayes Nets 2 Introduction So far we
Reasoning Under Uncertainty Over Time CS 486/686: Introduction to Artificial Intelligence 1 Outline Reasoning under uncertainty over time Hidden Markov Models Dynamic Bayes Nets 2 Introduction So far we
MAE 493G, CpE 493M, Mobile Robotics. 6. Basic Probability
 MAE 493G, CpE 493M, Mobile Robotics 6. Basic Probability Instructor: Yu Gu, Fall 2013 Uncertainties in Robotics Robot environments are inherently unpredictable; Sensors and data acquisition systems are
MAE 493G, CpE 493M, Mobile Robotics 6. Basic Probability Instructor: Yu Gu, Fall 2013 Uncertainties in Robotics Robot environments are inherently unpredictable; Sensors and data acquisition systems are
Week 3: Wheeled Kinematics AMR - Autonomous Mobile Robots
 Week 3: Wheeled Kinematics AMR - Paul Furgale Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart Wheeled Kinematics 1 AMRx Flipped Classroom A Matlab exercise is coming later
Week 3: Wheeled Kinematics AMR - Paul Furgale Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart Wheeled Kinematics 1 AMRx Flipped Classroom A Matlab exercise is coming later
Control of Mobile Robots Prof. Luca Bascetta
 Control of Mobile Robots Prof. Luca Bascetta EXERCISE 1 1. Consider a wheel rolling without slipping on the horizontal plane, keeping the sagittal plane in the vertical direction. Write the expression
Control of Mobile Robots Prof. Luca Bascetta EXERCISE 1 1. Consider a wheel rolling without slipping on the horizontal plane, keeping the sagittal plane in the vertical direction. Write the expression
Using the Kalman Filter for SLAM AIMS 2015
 Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Lecture : Probabilistic Machine Learning
 Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
Lecture : Probabilistic Machine Learning Riashat Islam Reasoning and Learning Lab McGill University September 11, 2018 ML : Many Methods with Many Links Modelling Views of Machine Learning Machine Learning
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
Recursive Estimation
 Recursive Estimation Raffaello D Andrea Spring 08 Problem Set : Bayes Theorem and Bayesian Tracking Last updated: March, 08 Notes: Notation: Unless otherwise noted, x, y, and z denote random variables,
Recursive Estimation Raffaello D Andrea Spring 08 Problem Set : Bayes Theorem and Bayesian Tracking Last updated: March, 08 Notes: Notation: Unless otherwise noted, x, y, and z denote random variables,
Introduction to Mobile Robotics Bayes Filter Kalman Filter
 Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
Introduction to Mobile Robotics Bayes Filter Kalman Filter Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Bayes Filter Reminder 1. Algorithm Bayes_filter( Bel(x),d ):
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
Institute of Geometry, Graz, University of Technology Mobile Robots. Lecture notes of the kinematic part of the lecture
 Institute of Geometry, Graz, University of Technology www.geometrie.tugraz.at Institute of Geometry Mobile Robots Lecture notes of the kinematic part of the lecture Anton Gfrerrer nd Edition 4 . Contents
Institute of Geometry, Graz, University of Technology www.geometrie.tugraz.at Institute of Geometry Mobile Robots Lecture notes of the kinematic part of the lecture Anton Gfrerrer nd Edition 4 . Contents
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
On the Observability and Self-Calibration of Visual-Inertial Navigation Systems
 Center for Robotics and Embedded Systems University of Southern California Technical Report CRES-08-005 R B TIC EMBEDDED SYSTEMS LABORATORY On the Observability and Self-Calibration of Visual-Inertial
Center for Robotics and Embedded Systems University of Southern California Technical Report CRES-08-005 R B TIC EMBEDDED SYSTEMS LABORATORY On the Observability and Self-Calibration of Visual-Inertial
Module 2. Random Processes. Version 2, ECE IIT, Kharagpur
 Module Random Processes Version, ECE IIT, Kharagpur Lesson 9 Introduction to Statistical Signal Processing Version, ECE IIT, Kharagpur After reading this lesson, you will learn about Hypotheses testing
Module Random Processes Version, ECE IIT, Kharagpur Lesson 9 Introduction to Statistical Signal Processing Version, ECE IIT, Kharagpur After reading this lesson, you will learn about Hypotheses testing
Mobile Robotics II: Simultaneous localization and mapping
 Mobile Robotics II: Simultaneous localization and mapping Introduction: probability theory, estimation Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision
Mobile Robotics II: Simultaneous localization and mapping Introduction: probability theory, estimation Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision
Probabilistic Robotics
 Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
Probabilistic Robotics Overview of probability, Representing uncertainty Propagation of uncertainty, Bayes Rule Application to Localization and Mapping Slides from Autonomous Robots (Siegwart and Nourbaksh),
Model Averaging (Bayesian Learning)
") Model Averaging (Bayesian Learning) We want to predict the output Y of a new case that has input X = x given the training examples e: p(y x e) = m M P(Y m x e) = m M P(Y m x e)p(m x e) = m M P(Y m x)p(m
Model Averaging (Bayesian Learning) We want to predict the output Y of a new case that has input X = x given the training examples e: p(y x e) = m M P(Y m x e) = m M P(Y m x e)p(m x e) = m M P(Y m x)p(m
Simultaneous Localization and Mapping Techniques
 Simultaneous Localization and Mapping Techniques Andrew Hogue Oral Exam: June 20, 2005 Contents 1 Introduction 1 1.1 Why is SLAM necessary?.................................. 2 1.2 A Brief History of SLAM...................................
Simultaneous Localization and Mapping Techniques Andrew Hogue Oral Exam: June 20, 2005 Contents 1 Introduction 1 1.1 Why is SLAM necessary?.................................. 2 1.2 A Brief History of SLAM...................................
Transdimensional Markov Chain Monte Carlo Methods. Jesse Kolb, Vedran Lekić (Univ. of MD) Supervisor: Kris Innanen
 Supervisor: Kris Innanen") Transdimensional Markov Chain Monte Carlo Methods Jesse Kolb, Vedran Lekić (Univ. of MD) Supervisor: Kris Innanen Motivation for Different Inversion Technique Inversion techniques typically provide a single
Transdimensional Markov Chain Monte Carlo Methods Jesse Kolb, Vedran Lekić (Univ. of MD) Supervisor: Kris Innanen Motivation for Different Inversion Technique Inversion techniques typically provide a single
DS-GA 1002 Lecture notes 11 Fall Bayesian statistics
 DS-GA 100 Lecture notes 11 Fall 016 Bayesian statistics In the frequentist paradigm we model the data as realizations from a distribution that depends on deterministic parameters. In contrast, in Bayesian
DS-GA 100 Lecture notes 11 Fall 016 Bayesian statistics In the frequentist paradigm we model the data as realizations from a distribution that depends on deterministic parameters. In contrast, in Bayesian
1 Introduction. Systems 2: Simulating Errors. Mobile Robot Systems. System Under. Environment
 Systems 2: Simulating Errors Introduction Simulating errors is a great way to test you calibration algorithms, your real-time identification algorithms, and your estimation algorithms. Conceptually, the
Systems 2: Simulating Errors Introduction Simulating errors is a great way to test you calibration algorithms, your real-time identification algorithms, and your estimation algorithms. Conceptually, the
Manipulators. Robotics. Outline. Non-holonomic robots. Sensors. Mobile Robots
 Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Inertial Odometry on Handheld Smartphones
 Inertial Odometry on Handheld Smartphones Arno Solin 1 Santiago Cortés 1 Esa Rahtu 2 Juho Kannala 1 1 Aalto University 2 Tampere University of Technology 21st International Conference on Information Fusion
Inertial Odometry on Handheld Smartphones Arno Solin 1 Santiago Cortés 1 Esa Rahtu 2 Juho Kannala 1 1 Aalto University 2 Tampere University of Technology 21st International Conference on Information Fusion
Control of Mobile Robots
 Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Cheng Soon Ong & Christian Walder. Canberra February June 2018
 Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 (Many figures from C. M. Bishop, "Pattern Recognition and ") 1of 89 Part II
Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 (Many figures from C. M. Bishop, "Pattern Recognition and ") 1of 89 Part II
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Improved Particle Filtering Based on Biogeography-based Optimization for UGV Navigation
 Improved Particle Filtering Based on Biogeography-based Optimization for UGV Navigation A. Kuifeng Su 1,2, B. Zhidong Deng 1, and C. Zhen Huang 1 1 Department of Computer Science, State Key Laboratory
Improved Particle Filtering Based on Biogeography-based Optimization for UGV Navigation A. Kuifeng Su 1,2, B. Zhidong Deng 1, and C. Zhen Huang 1 1 Department of Computer Science, State Key Laboratory
CSEP 573: Artificial Intelligence
 CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic