Topic 9 Potential fields: Follow your potential
|
|
|
- Hilda Craig
- 5 years ago
- Views:
Transcription

1 Topic 9 Potential fields: Follow your potential
2 Path Planning B: Goal Find intermediate poses forming a path to the goal ) How can we find such paths? 2) Define pose and controls? Path on a graph: vertices - robot poses A: Start edges - traversable connection between poses (note edges are directed)
3 Approaches to path planning Search (fixed graph) DFS, BFS, Dijkstra, A* Search (build graph): Probabilistic Road Maps Rapidly-exploring Random Trees Optimization (local search): Potential fields, gradient descent
4 Potential field volcanic on fire Energy potential converges at goal heating up How do we define this potential? colder a little warmer cold

5 Potential Energy Energy stored in a physical system For objects acting only w.r.t. gravity PE = mass*height*gravity

6 Convergent Potentials let s call these attractor landscapes Start Start Goal Goal basin of attraction
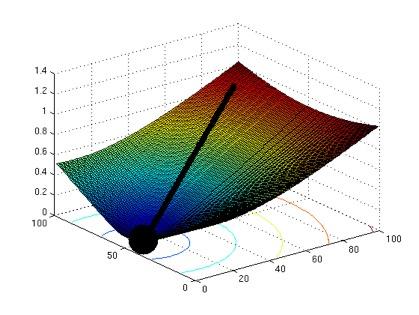
7 2D potential navigation z: height indicates potential at location x = Start x d = Goal basin of attraction x-y plane: robot position
8 Cone Attractor x d = Goal Attractor Start w: weight (x d -x): direction x d -x : distance u = w(x d -x)/ x d -x x = Start Goal top view side view
9 Cone Attractor x d = Goal Attractor x d -x Start w: weight (x d -x): direction x d -x : distance (x d -x) u = w(x d -x)/ x d -x x = Start Goal top view side view
10 Cone Attractor x d = Goal Attractor x d -x Start w: weight (x d -x): direction x d -x : distance (x d -x) unit vector (x d -x)/ x d -x u = w(x d -x)/ x d -x x = Start Goal top view side view
11 Cone Attractor x d = Goal Attractor x d -x Start w: weight (x d -x): direction x d -x : distance (x d -x) unit vector (x d -x)/ x d -x u = w(x d -x)/ x d -x w x = Start Goal top view side view
12 Bowl Attractor x d = Goal Start u = exp(- x d -x /w) (x d -x) Goal x = Start top view side view
13 exp(-d/w) exp(-d/0) exp(-d/w) : influence of potential exp(-d/) exp(-d/0.5) exp(-d/.0) d = distance exp(-d/2)
14 Multiple potentials Output of potential field is a vector potential 2 (x) potential (x) How to combine or select between multiple potentials?
15 Multiple potentials i potential i (x) Output of potential field is a vector potential 2 (x) potential (x) Combine multiple potentials through vector summation u = i potential i (x) or u = potential (x)+ potential (x)
16 describe performance for this case Goal Current
17 describe performance for this case Goal Obstacles Repellors Current
18 describe performance for this case how do we deal with repellors? Goal Obstacles Repellors Current
19 Cone Repellor potential problems Obstacle Repellor Goal reverse direction u = w(x-x d )/ x d -x x = Start Start top view side view
20 Bowl Repellor Obstacle Repellor Goal u = exp(- x-x d /w) (x d -x) Start x = Start top view side view
21 describe performance for this case Goal Current
22 describe performance for this case Goal Current
23 describe performance for this case Goal Current

24 matlab example /course/cs48/pub/pfield.m How to address local minima?
25 [Prin. of Robot Motion] Wavefront planning Combine search with potential field Start: mark with 0 0 Goal: mark with 2
26 [Prin. of Robot Motion] Wavefront planning Obstacles: mark with 0
27 [Prin. of Robot Motion] Wavefront planning 0 BFS away from goal, mark depth unless

28 [Prin. of Robot Motion] Wavefront planning 0

29 [Prin. of Robot Motion] Wavefront planning 0

30 [Prin. of Robot Motion] Wavefront planning 0

31 [Prin. of Robot Motion] Wavefront planning 0
32 [Prin. of Robot Motion] Wavefront planning
33 [Prin. of Robot Motion] Wavefront planning Once start reached, follow potential to goal
Algorithms for Sensor-Based Robotics: Potential Functions
 Algorithms for Sensor-Based Robotics: Potential Functions Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager The Basic Idea A really simple idea:
Algorithms for Sensor-Based Robotics: Potential Functions Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager The Basic Idea A really simple idea:
MEM380 Applied Autonomous Robots I Fall BUG Algorithms Potential Fields
 MEM380 Applied Autonomous Robots I Fall BUG Algorithms Potential Fields What s Special About Bugs? Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge of the environment
MEM380 Applied Autonomous Robots I Fall BUG Algorithms Potential Fields What s Special About Bugs? Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge of the environment
Neural networks III: The delta learning rule with semilinear activation function
 Neural networks III: The delta learning rule with semilinear activation function The standard delta rule essentially implements gradient descent in sum-squared error for linear activation functions. We
Neural networks III: The delta learning rule with semilinear activation function The standard delta rule essentially implements gradient descent in sum-squared error for linear activation functions. We
Lecture 8: Kinematics: Path and Trajectory Planning
 Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration Space c Anton Shiriaev. 5EL158: Lecture 8 p. 1/20 Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration
Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration Space c Anton Shiriaev. 5EL158: Lecture 8 p. 1/20 Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration
Graph Search Howie Choset
 Graph Search Howie Choset 16-11 Outline Overview of Search Techniques A* Search Graphs Collection of Edges and Nodes (Vertices) A tree Grids Stacks and Queues Stack: First in, Last out (FILO) Queue: First
Graph Search Howie Choset 16-11 Outline Overview of Search Techniques A* Search Graphs Collection of Edges and Nodes (Vertices) A tree Grids Stacks and Queues Stack: First in, Last out (FILO) Queue: First
A population of fish is modeled by the logistic equation modified to account for harvesting: 4
 Partial solution key A population of fish is modeled by the logistic equation modified to account for harvesting: dddd dddd =.pp pp aa or equivalently dddd dddd = 6 pp + pp aa. What are the equilibrium
Partial solution key A population of fish is modeled by the logistic equation modified to account for harvesting: dddd dddd =.pp pp aa or equivalently dddd dddd = 6 pp + pp aa. What are the equilibrium
Markov Chains and MCMC
 Markov Chains and MCMC Markov chains Let S = {1, 2,..., N} be a finite set consisting of N states. A Markov chain Y 0, Y 1, Y 2,... is a sequence of random variables, with Y t S for all points in time
Markov Chains and MCMC Markov chains Let S = {1, 2,..., N} be a finite set consisting of N states. A Markov chain Y 0, Y 1, Y 2,... is a sequence of random variables, with Y t S for all points in time
Programming Robots in ROS Slides adapted from CMU, Harvard and TU Stuttgart
 Programming Robots in ROS Slides adapted from CMU, Harvard and TU Stuttgart Path Planning Problem Given an initial configuration q_start and a goal configuration q_goal,, we must generate the best continuous
Programming Robots in ROS Slides adapted from CMU, Harvard and TU Stuttgart Path Planning Problem Given an initial configuration q_start and a goal configuration q_goal,, we must generate the best continuous
Analysis of the Lennard-Jones-38 stochastic network
 Analysis of the Lennard-Jones-38 stochastic network Maria Cameron Joint work with E. Vanden-Eijnden Lennard-Jones clusters Pair potential: V(r) = 4e(r -12 - r -6 ) 1. Wales, D. J., Energy landscapes: calculating
Analysis of the Lennard-Jones-38 stochastic network Maria Cameron Joint work with E. Vanden-Eijnden Lennard-Jones clusters Pair potential: V(r) = 4e(r -12 - r -6 ) 1. Wales, D. J., Energy landscapes: calculating
Introduction to Mobile Robotics Probabilistic Sensor Models
 Introduction to Mobile Robotics Probabilistic Sensor Models Wolfram Burgard 1 Sensors for Mobile Robots Contact sensors: Bumpers Proprioceptive sensors Accelerometers (spring-mounted masses) Gyroscopes
Introduction to Mobile Robotics Probabilistic Sensor Models Wolfram Burgard 1 Sensors for Mobile Robots Contact sensors: Bumpers Proprioceptive sensors Accelerometers (spring-mounted masses) Gyroscopes
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
A. The Hopfield Network. III. Recurrent Neural Networks. Typical Artificial Neuron. Typical Artificial Neuron. Hopfield Network.
 III. Recurrent Neural Networks A. The Hopfield Network 2/9/15 1 2/9/15 2 Typical Artificial Neuron Typical Artificial Neuron connection weights linear combination activation function inputs output net
III. Recurrent Neural Networks A. The Hopfield Network 2/9/15 1 2/9/15 2 Typical Artificial Neuron Typical Artificial Neuron connection weights linear combination activation function inputs output net
Manipulators. Robotics. Outline. Non-holonomic robots. Sensors. Mobile Robots
 Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
The Big Picture. Discuss Examples of unpredictability. Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986)
 Chaos, Scientific American (1986)") The Big Picture Discuss Examples of unpredictability Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986) Lecture 2: Natural Computation & Self-Organization, Physics 256A (Winter
The Big Picture Discuss Examples of unpredictability Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986) Lecture 2: Natural Computation & Self-Organization, Physics 256A (Winter
Machine Learning. Lecture 04: Logistic and Softmax Regression. Nevin L. Zhang
 Machine Learning Lecture 04: Logistic and Softmax Regression Nevin L. Zhang lzhang@cse.ust.hk Department of Computer Science and Engineering The Hong Kong University of Science and Technology This set
Machine Learning Lecture 04: Logistic and Softmax Regression Nevin L. Zhang lzhang@cse.ust.hk Department of Computer Science and Engineering The Hong Kong University of Science and Technology This set
Need for Deep Networks Perceptron. Can only model linear functions. Kernel Machines. Non-linearity provided by kernels
 Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
Need for Deep Networks Perceptron Can only model linear functions Kernel Machines Non-linearity provided by kernels Need to design appropriate kernels (possibly selecting from a set, i.e. kernel learning)
Gross Motion Planning
 Gross Motion Planning...given a moving object, A, initially in an unoccupied region of freespace, s, a set of stationary objects, B i, at known locations, and a legal goal position, g, find a sequence
Gross Motion Planning...given a moving object, A, initially in an unoccupied region of freespace, s, a set of stationary objects, B i, at known locations, and a legal goal position, g, find a sequence
MAE 598: Multi-Robot Systems Fall 2016
 MAE 598: Multi-Robot Systems Fall 2016 Instructor: Spring Berman spring.berman@asu.edu Assistant Professor, Mechanical and Aerospace Engineering Autonomous Collective Systems Laboratory http://faculty.engineering.asu.edu/acs/
MAE 598: Multi-Robot Systems Fall 2016 Instructor: Spring Berman spring.berman@asu.edu Assistant Professor, Mechanical and Aerospace Engineering Autonomous Collective Systems Laboratory http://faculty.engineering.asu.edu/acs/
Neural Network Training
 Neural Network Training Sargur Srihari Topics in Network Training 0. Neural network parameters Probabilistic problem formulation Specifying the activation and error functions for Regression Binary classification
Neural Network Training Sargur Srihari Topics in Network Training 0. Neural network parameters Probabilistic problem formulation Specifying the activation and error functions for Regression Binary classification
Chapter 10 Associative Memory Networks We are in for a surprise though!
 We are in for a surprise though! 11 If we return to our calculated W based on the stored ξ and use x = (-1,1,-1,-1,-1,1) T as the input then we get the output y = (-1,1,-1,-1,-1,1) T, i.e. the same output
We are in for a surprise though! 11 If we return to our calculated W based on the stored ξ and use x = (-1,1,-1,-1,-1,1) T as the input then we get the output y = (-1,1,-1,-1,-1,1) T, i.e. the same output
Fundamentals of Metaheuristics
 Fundamentals of Metaheuristics Part I - Basic concepts and Single-State Methods A seminar for Neural Networks Simone Scardapane Academic year 2012-2013 ABOUT THIS SEMINAR The seminar is divided in three
Fundamentals of Metaheuristics Part I - Basic concepts and Single-State Methods A seminar for Neural Networks Simone Scardapane Academic year 2012-2013 ABOUT THIS SEMINAR The seminar is divided in three
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
Neural Networks Learning the network: Backprop , Fall 2018 Lecture 4
 Neural Networks Learning the network: Backprop 11-785, Fall 2018 Lecture 4 1 Recap: The MLP can represent any function The MLP can be constructed to represent anything But how do we construct it? 2 Recap:
Neural Networks Learning the network: Backprop 11-785, Fall 2018 Lecture 4 1 Recap: The MLP can represent any function The MLP can be constructed to represent anything But how do we construct it? 2 Recap:
A. The Hopfield Network. III. Recurrent Neural Networks. Typical Artificial Neuron. Typical Artificial Neuron. Hopfield Network.
 Part 3A: Hopfield Network III. Recurrent Neural Networks A. The Hopfield Network 1 2 Typical Artificial Neuron Typical Artificial Neuron connection weights linear combination activation function inputs
Part 3A: Hopfield Network III. Recurrent Neural Networks A. The Hopfield Network 1 2 Typical Artificial Neuron Typical Artificial Neuron connection weights linear combination activation function inputs
EARTH S ENERGY SOURCES
 EARTH S ENERGY SOURCES The geological processes that shape the Earth s surface are powered by two major sources of energy; geothermal heat from the Earth s interior and external energy from the sun. The
EARTH S ENERGY SOURCES The geological processes that shape the Earth s surface are powered by two major sources of energy; geothermal heat from the Earth s interior and external energy from the sun. The
Derivative and Integral: Some Concepts for Geodesy
 Derivative and Integral: Some Concepts for Geodesy James R. Clynch, 2003 I. Rates of Change (Derivatives) and Integrals There are many places in physics where the rates of change occur. This is the derivative
Derivative and Integral: Some Concepts for Geodesy James R. Clynch, 2003 I. Rates of Change (Derivatives) and Integrals There are many places in physics where the rates of change occur. This is the derivative
Behavioral Data Mining. Lecture 7 Linear and Logistic Regression
 Behavioral Data Mining Lecture 7 Linear and Logistic Regression Outline Linear Regression Regularization Logistic Regression Stochastic Gradient Fast Stochastic Methods Performance tips Linear Regression
Behavioral Data Mining Lecture 7 Linear and Logistic Regression Outline Linear Regression Regularization Logistic Regression Stochastic Gradient Fast Stochastic Methods Performance tips Linear Regression
Ngày 20 tháng 7 năm Discrete Optimization Graphs
 Discrete Optimization Graphs Ngày 20 tháng 7 năm 2011 Lecture 6: Graphs In this class we shall prove some simple, useful theorems about graphs. We start with very simple obseravations. Lecture 6: Graphs
Discrete Optimization Graphs Ngày 20 tháng 7 năm 2011 Lecture 6: Graphs In this class we shall prove some simple, useful theorems about graphs. We start with very simple obseravations. Lecture 6: Graphs
Linear Regression. CSL603 - Fall 2017 Narayanan C Krishnan
 Linear Regression CSL603 - Fall 2017 Narayanan C Krishnan ckn@iitrpr.ac.in Outline Univariate regression Multivariate regression Probabilistic view of regression Loss functions Bias-Variance analysis Regularization
Linear Regression CSL603 - Fall 2017 Narayanan C Krishnan ckn@iitrpr.ac.in Outline Univariate regression Multivariate regression Probabilistic view of regression Loss functions Bias-Variance analysis Regularization
Linear Regression. CSL465/603 - Fall 2016 Narayanan C Krishnan
 Linear Regression CSL465/603 - Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Outline Univariate regression Multivariate regression Probabilistic view of regression Loss functions Bias-Variance analysis
Linear Regression CSL465/603 - Fall 2016 Narayanan C Krishnan ckn@iitrpr.ac.in Outline Univariate regression Multivariate regression Probabilistic view of regression Loss functions Bias-Variance analysis
( ) T. Reading. Lecture 22. Definition of Covariance. Imprinting Multiple Patterns. Characteristics of Hopfield Memory
 T. Reading. Lecture 22. Definition of Covariance. Imprinting Multiple Patterns. Characteristics of Hopfield Memory") Part 3: Autonomous Agents /8/07 Reading Lecture 22 Flake, ch. 20 ( Genetics and Evolution ) /8/07 /8/07 2 Imprinting Multiple Patterns Let x, x 2,, x p be patterns to be imprinted Define the sum-of-outer-products
Part 3: Autonomous Agents /8/07 Reading Lecture 22 Flake, ch. 20 ( Genetics and Evolution ) /8/07 /8/07 2 Imprinting Multiple Patterns Let x, x 2,, x p be patterns to be imprinted Define the sum-of-outer-products
Guest Lecture: Steering in Games. the. gamedesigninitiative at cornell university
 Guest Lecture: Pathfinding You are given Starting location A Goal location B Want valid path A to B Avoid impassible terrain Eschew hidden knowledge Want natural path A to B Reasonably short path Avoid
Guest Lecture: Pathfinding You are given Starting location A Goal location B Want valid path A to B Avoid impassible terrain Eschew hidden knowledge Want natural path A to B Reasonably short path Avoid
The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance. Samuel Prentice and Nicholas Roy Presentation by Elaine Short
 The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance Samuel Prentice and Nicholas Roy Presentation by Elaine Short 1 Outline" Motivation Review of PRM and EKF Factoring the
The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance Samuel Prentice and Nicholas Roy Presentation by Elaine Short 1 Outline" Motivation Review of PRM and EKF Factoring the
Mathematical optimization
 Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
The Relation between the Integral and the Derivative Graphs. Unit #10 : Graphs of Antiderivatives, Substitution Integrals
 Graphs of Antiderivatives - Unit #0 : Graphs of Antiderivatives, Substitution Integrals Goals: Relationship between the graph of f(x) and its anti-derivative F (x) The guess-and-check method for anti-differentiation.
Graphs of Antiderivatives - Unit #0 : Graphs of Antiderivatives, Substitution Integrals Goals: Relationship between the graph of f(x) and its anti-derivative F (x) The guess-and-check method for anti-differentiation.
Gravitational potential. Is this the same as gravitational potential energy?
 Gravitational potential Is this the same as gravitational potential energy? F = g = F m g = (-) GM R 2 g x = 4 3 πgρx Review GMm R2 force b/w two point masses gravitational field strength on Earth gravitational
Gravitational potential Is this the same as gravitational potential energy? F = g = F m g = (-) GM R 2 g x = 4 3 πgρx Review GMm R2 force b/w two point masses gravitational field strength on Earth gravitational
Neural Networks. Bishop PRML Ch. 5. Alireza Ghane. Feed-forward Networks Network Training Error Backpropagation Applications
 Neural Networks Bishop PRML Ch. 5 Alireza Ghane Neural Networks Alireza Ghane / Greg Mori 1 Neural Networks Neural networks arise from attempts to model human/animal brains Many models, many claims of
Neural Networks Bishop PRML Ch. 5 Alireza Ghane Neural Networks Alireza Ghane / Greg Mori 1 Neural Networks Neural networks arise from attempts to model human/animal brains Many models, many claims of
Motion Planning in Partially Known Dynamic Environments
 Motion Planning in Partially Known Dynamic Environments Movie Workshop Laas-CNRS, Toulouse (FR), January 7-8, 2005 Dr. Thierry Fraichard e-motion Team Inria Rhône-Alpes & Gravir-CNRS Laboratory Movie Workshop
Motion Planning in Partially Known Dynamic Environments Movie Workshop Laas-CNRS, Toulouse (FR), January 7-8, 2005 Dr. Thierry Fraichard e-motion Team Inria Rhône-Alpes & Gravir-CNRS Laboratory Movie Workshop
Robotics. Path Planning. Marc Toussaint U Stuttgart
 Robotics Path Planning Path finding vs. trajectory optimization, local vs. global, Dijkstra, Probabilistic Roadmaps, Rapidly Exploring Random Trees, non-holonomic systems, car system equation, path-finding
Robotics Path Planning Path finding vs. trajectory optimization, local vs. global, Dijkstra, Probabilistic Roadmaps, Rapidly Exploring Random Trees, non-holonomic systems, car system equation, path-finding
A Tutorial On Backward Propagation Through Time (BPTT) In The Gated Recurrent Unit (GRU) RNN
 In The Gated Recurrent Unit (GRU) RNN") A Tutorial On Backward Propagation Through Time (BPTT In The Gated Recurrent Unit (GRU RNN Minchen Li Department of Computer Science The University of British Columbia minchenl@cs.ubc.ca Abstract In this
A Tutorial On Backward Propagation Through Time (BPTT In The Gated Recurrent Unit (GRU RNN Minchen Li Department of Computer Science The University of British Columbia minchenl@cs.ubc.ca Abstract In this
General Theoretical Concepts Related to Multibody Dynamics
 General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
Graphs of Antiderivatives, Substitution Integrals
 Unit #10 : Graphs of Antiderivatives, Substitution Integrals Goals: Relationship between the graph of f(x) and its anti-derivative F (x) The guess-and-check method for anti-differentiation. The substitution
Unit #10 : Graphs of Antiderivatives, Substitution Integrals Goals: Relationship between the graph of f(x) and its anti-derivative F (x) The guess-and-check method for anti-differentiation. The substitution
Kinetic Theory. 84 minutes. 62 marks. theonlinephysicstutor.com. facebook.com/theonlinephysicstutor. Name: Class: Date: Time: Marks: Comments:
 Kinetic Theory Name: Class: Date: Time: 84 minutes Marks: 62 marks Comments: Page 1 of 19 1 Which one of the following is not an assumption about the properties of particles in the simple kinetic theory?
Kinetic Theory Name: Class: Date: Time: 84 minutes Marks: 62 marks Comments: Page 1 of 19 1 Which one of the following is not an assumption about the properties of particles in the simple kinetic theory?
A harmonic function on a domain Ω R n is a function which satisfies Laplace s equation:
 Resistors, Markov Chains & Dynamic Path Planning John S. Zelek School of Engineering, Univ. of Guelph Guelph, ON, NG W, Canada. e-mail: jzelek@uoguelph.ca Abstract Dynamic planning involves continuously
Resistors, Markov Chains & Dynamic Path Planning John S. Zelek School of Engineering, Univ. of Guelph Guelph, ON, NG W, Canada. e-mail: jzelek@uoguelph.ca Abstract Dynamic planning involves continuously
13 : Variational Inference: Loopy Belief Propagation
 10-708: Probabilistic Graphical Models 10-708, Spring 2014 13 : Variational Inference: Loopy Belief Propagation Lecturer: Eric P. Xing Scribes: Rajarshi Das, Zhengzhong Liu, Dishan Gupta 1 Introduction
10-708: Probabilistic Graphical Models 10-708, Spring 2014 13 : Variational Inference: Loopy Belief Propagation Lecturer: Eric P. Xing Scribes: Rajarshi Das, Zhengzhong Liu, Dishan Gupta 1 Introduction
Capacity Estimation. Based on Joe Mitchell s slides
 Capacity Estimation Based on Joe Mitchell s slides Output: Capacity What is capacity? Estimate of number of aircraft that can be safely routed within a constrained airspace. Demand-driven capacity Sector-induced
Capacity Estimation Based on Joe Mitchell s slides Output: Capacity What is capacity? Estimate of number of aircraft that can be safely routed within a constrained airspace. Demand-driven capacity Sector-induced
Unit #10 : Graphs of Antiderivatives, Substitution Integrals
 Unit #10 : Graphs of Antiderivatives, Substitution Integrals Goals: Relationship between the graph of f(x) and its anti-derivative F(x) The guess-and-check method for anti-differentiation. The substitution
Unit #10 : Graphs of Antiderivatives, Substitution Integrals Goals: Relationship between the graph of f(x) and its anti-derivative F(x) The guess-and-check method for anti-differentiation. The substitution
Robot Mapping. Least Squares. Cyrill Stachniss
 Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
Robot Mapping Least Squares Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for computing a solution
AQA Physics Checklist
 Topic 1. Energy Video: Energy changes in a system To understand the ways in which energy can be stored in a system and can be transferred from one energy store to another within a system To understand
Topic 1. Energy Video: Energy changes in a system To understand the ways in which energy can be stored in a system and can be transferred from one energy store to another within a system To understand
Logistic Regression. Stochastic Gradient Descent
 Tutorial 8 CPSC 340 Logistic Regression Stochastic Gradient Descent Logistic Regression Model A discriminative probabilistic model for classification e.g. spam filtering Let x R d be input and y { 1, 1}
Tutorial 8 CPSC 340 Logistic Regression Stochastic Gradient Descent Logistic Regression Model A discriminative probabilistic model for classification e.g. spam filtering Let x R d be input and y { 1, 1}
Variational Bayesian Logistic Regression
 Variational Bayesian Logistic Regression Sargur N. University at Buffalo, State University of New York USA Topics in Linear Models for Classification Overview 1. Discriminant Functions 2. Probabilistic
Variational Bayesian Logistic Regression Sargur N. University at Buffalo, State University of New York USA Topics in Linear Models for Classification Overview 1. Discriminant Functions 2. Probabilistic
Robotics. Path Planning. University of Stuttgart Winter 2018/19
 Robotics Path Planning Path finding vs. trajectory optimization, local vs. global, Dijkstra, Probabilistic Roadmaps, Rapidly Exploring Random Trees, non-holonomic systems, car system equation, path-finding
Robotics Path Planning Path finding vs. trajectory optimization, local vs. global, Dijkstra, Probabilistic Roadmaps, Rapidly Exploring Random Trees, non-holonomic systems, car system equation, path-finding
Multidisciplinary System Design Optimization (MSDO)
") Multidisciplinary System Design Optimization (MSDO) Numerical Optimization II Lecture 8 Karen Willcox 1 Massachusetts Institute of Technology - Prof. de Weck and Prof. Willcox Today s Topics Sequential
Multidisciplinary System Design Optimization (MSDO) Numerical Optimization II Lecture 8 Karen Willcox 1 Massachusetts Institute of Technology - Prof. de Weck and Prof. Willcox Today s Topics Sequential
The Whys of Weather Rain
 Non-fiction: The Whys of Weather - Rain The Whys of Weather Rain Why does it rain? The sky gets cloudy. Clouds get darker and darker. The sun disappears, and soon drops start falling from the sky. But
Non-fiction: The Whys of Weather - Rain The Whys of Weather Rain Why does it rain? The sky gets cloudy. Clouds get darker and darker. The sun disappears, and soon drops start falling from the sky. But
Fire and Ice. The Fate of the Universe. Jon Thaler
 Fire and Ice The Fate of the Universe Jon Thaler Saturday Physics Honors Program Oct. 13, 2007 Some say the world will end in fire, Some say in ice. From what I've tasted of desire I hold with those who
Fire and Ice The Fate of the Universe Jon Thaler Saturday Physics Honors Program Oct. 13, 2007 Some say the world will end in fire, Some say in ice. From what I've tasted of desire I hold with those who
CSC321 Lecture 7: Optimization
 CSC321 Lecture 7: Optimization Roger Grosse Roger Grosse CSC321 Lecture 7: Optimization 1 / 25 Overview We ve talked a lot about how to compute gradients. What do we actually do with them? Today s lecture:
CSC321 Lecture 7: Optimization Roger Grosse Roger Grosse CSC321 Lecture 7: Optimization 1 / 25 Overview We ve talked a lot about how to compute gradients. What do we actually do with them? Today s lecture:
Linear Regression 1 / 25. Karl Stratos. June 18, 2018
 Linear Regression Karl Stratos June 18, 2018 1 / 25 The Regression Problem Problem. Find a desired input-output mapping f : X R where the output is a real value. x = = y = 0.1 How much should I turn my
Linear Regression Karl Stratos June 18, 2018 1 / 25 The Regression Problem Problem. Find a desired input-output mapping f : X R where the output is a real value. x = = y = 0.1 How much should I turn my
Clustering non-stationary data streams and its applications
 Clustering non-stationary data streams and its applications Amr Abdullatif DIBRIS, University of Genoa, Italy amr.abdullatif@unige.it June 22th, 2016 Outline Introduction 1 Introduction 2 3 4 INTRODUCTION
Clustering non-stationary data streams and its applications Amr Abdullatif DIBRIS, University of Genoa, Italy amr.abdullatif@unige.it June 22th, 2016 Outline Introduction 1 Introduction 2 3 4 INTRODUCTION
1 Introduction to Governing Equations 2 1a Methodology... 2
 Contents 1 Introduction to Governing Equations 2 1a Methodology............................ 2 2 Equation of State 2 2a Mean and Turbulent Parts...................... 3 2b Reynolds Averaging.........................
Contents 1 Introduction to Governing Equations 2 1a Methodology............................ 2 2 Equation of State 2 2a Mean and Turbulent Parts...................... 3 2b Reynolds Averaging.........................
Discrete Wiskunde II. Lecture 5: Shortest Paths & Spanning Trees
 , 2009 Lecture 5: Shortest Paths & Spanning Trees University of Twente m.uetz@utwente.nl wwwhome.math.utwente.nl/~uetzm/dw/ Shortest Path Problem "#$%&'%()*%"()$#+,&- Given directed "#$%&'()*+,%+('-*.#/'01234564'.*,'7+"-%/8',&'5"4'84%#3
, 2009 Lecture 5: Shortest Paths & Spanning Trees University of Twente m.uetz@utwente.nl wwwhome.math.utwente.nl/~uetzm/dw/ Shortest Path Problem "#$%&'%()*%"()$#+,&- Given directed "#$%&'()*+,%+('-*.#/'01234564'.*,'7+"-%/8',&'5"4'84%#3
CHAPTER 18 ELECTRIC POTENTIAL
 CHAPTER 18 ELECTRIC POTENTIAL BASIC CONCEPTS: ELECTRIC POTENTIAL ENERGY ELECTRIC POTENTIAL ELECTRIC POTENTIAL GRADIENT POTENTIAL DIFFERENCE POTENTIAL ENERGY 1 h PE = U = mgh Or PE U KE K And U + K = total
CHAPTER 18 ELECTRIC POTENTIAL BASIC CONCEPTS: ELECTRIC POTENTIAL ENERGY ELECTRIC POTENTIAL ELECTRIC POTENTIAL GRADIENT POTENTIAL DIFFERENCE POTENTIAL ENERGY 1 h PE = U = mgh Or PE U KE K And U + K = total
v n+1 = v T + (v 0 - v T )exp(-[n +1]/ N )
![v n+1 = v T + (v 0 - v T )exp(-[n +1]/ N )](/thumbs/87/97076064.jpg "v n+1 = v T + (v 0 - v T )exp(-[n +1]/ N )") Notes on Dynamical Systems (continued) 2. Maps The surprisingly complicated behavior of the physical pendulum, and many other physical systems as well, can be more readily understood by examining their
Notes on Dynamical Systems (continued) 2. Maps The surprisingly complicated behavior of the physical pendulum, and many other physical systems as well, can be more readily understood by examining their
ESS15 Lecture 10. Winds and weather The Coriolis force Global circulations of atmosphere & ocean Weather vs. Climate
 ESS15 Lecture 10 Winds and weather The Coriolis force Global circulations of atmosphere & ocean Weather vs. Climate Earth s energy imbalances, winds, and the global circulation of the atmopshere. Please
ESS15 Lecture 10 Winds and weather The Coriolis force Global circulations of atmosphere & ocean Weather vs. Climate Earth s energy imbalances, winds, and the global circulation of the atmopshere. Please
Multi-robot Coverage and Exploration on Riemannian Manifolds with Boundary
 Multi-robot Coverage and Exploration on Riemannian Manifolds with Boundary Subhrajit Bhattacharya Robert Ghrist Vijay Kumar Abstract Multi-robot coverage and exploration are fundamental problems in robotics.
Multi-robot Coverage and Exploration on Riemannian Manifolds with Boundary Subhrajit Bhattacharya Robert Ghrist Vijay Kumar Abstract Multi-robot coverage and exploration are fundamental problems in robotics.
Multiclass Logistic Regression
 Multiclass Logistic Regression Sargur. Srihari University at Buffalo, State University of ew York USA Machine Learning Srihari Topics in Linear Classification using Probabilistic Discriminative Models
Multiclass Logistic Regression Sargur. Srihari University at Buffalo, State University of ew York USA Machine Learning Srihari Topics in Linear Classification using Probabilistic Discriminative Models
CSC321 Lecture 8: Optimization
 CSC321 Lecture 8: Optimization Roger Grosse Roger Grosse CSC321 Lecture 8: Optimization 1 / 26 Overview We ve talked a lot about how to compute gradients. What do we actually do with them? Today s lecture:
CSC321 Lecture 8: Optimization Roger Grosse Roger Grosse CSC321 Lecture 8: Optimization 1 / 26 Overview We ve talked a lot about how to compute gradients. What do we actually do with them? Today s lecture:
Exploring the energy landscape
 Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
IYGB Mathematical Methods 1
 IYGB Mathematical Methods Practice Paper A Time: 3 hours Candidates may use any non programmable, non graphical calculator which does not have the capability of storing data or manipulating algebraic expressions
IYGB Mathematical Methods Practice Paper A Time: 3 hours Candidates may use any non programmable, non graphical calculator which does not have the capability of storing data or manipulating algebraic expressions
5 th Grade Force and Motion Study Guide
 Name: Date of Test: Vocabulary 5 th Grade Force and Motion Study Guide Motion- a change in position relative to a point of reference, a change in speed, or a change in distance. Point of Reference (Reference
Name: Date of Test: Vocabulary 5 th Grade Force and Motion Study Guide Motion- a change in position relative to a point of reference, a change in speed, or a change in distance. Point of Reference (Reference
Searching in non-deterministic, partially observable and unknown environments
 Searching in non-deterministic, partially observable and unknown environments CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence:
Searching in non-deterministic, partially observable and unknown environments CE417: Introduction to Artificial Intelligence Sharif University of Technology Spring 2017 Soleymani Artificial Intelligence:
STUDY GUIDE - 6TH GRADE WEEK 12 CCA
 1. Which of the following statements about energy is true? STUDY GUIDE - 6TH GRADE WEEK 12 CCA A. Potential energy and kinetic energy are different names for the same kind of energy. B. Gravity has nothing
1. Which of the following statements about energy is true? STUDY GUIDE - 6TH GRADE WEEK 12 CCA A. Potential energy and kinetic energy are different names for the same kind of energy. B. Gravity has nothing
Query Processing in Spatial Network Databases
 Temporal and Spatial Data Management Fall 0 Query Processing in Spatial Network Databases SL06 Spatial network databases Shortest Path Incremental Euclidean Restriction Incremental Network Expansion Spatial
Temporal and Spatial Data Management Fall 0 Query Processing in Spatial Network Databases SL06 Spatial network databases Shortest Path Incremental Euclidean Restriction Incremental Network Expansion Spatial
g(2, 1) = cos(2π) + 1 = = 9
 = cos(2π) + 1 = = 9") 1. Let gx, y 2x 2 cos2πy 2 + y 2. You can use the fact that Dg2, 1 [8 2]. a Find an equation for the tangent plane to the graph z gx, y at the point 2, 1. There are two key parts to this problem. The first,
1. Let gx, y 2x 2 cos2πy 2 + y 2. You can use the fact that Dg2, 1 [8 2]. a Find an equation for the tangent plane to the graph z gx, y at the point 2, 1. There are two key parts to this problem. The first,
Learning in State-Space Reinforcement Learning CIS 32
 Learning in State-Space Reinforcement Learning CIS 32 Functionalia Syllabus Updated: MIDTERM and REVIEW moved up one day. MIDTERM: Everything through Evolutionary Agents. HW 2 Out - DUE Sunday before the
Learning in State-Space Reinforcement Learning CIS 32 Functionalia Syllabus Updated: MIDTERM and REVIEW moved up one day. MIDTERM: Everything through Evolutionary Agents. HW 2 Out - DUE Sunday before the
Sensors Fusion for Mobile Robotics localization. M. De Cecco - Robotics Perception and Action
 Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Bayesian Learning in Undirected Graphical Models
 Bayesian Learning in Undirected Graphical Models Zoubin Ghahramani Gatsby Computational Neuroscience Unit University College London, UK http://www.gatsby.ucl.ac.uk/ and Center for Automated Learning and
Bayesian Learning in Undirected Graphical Models Zoubin Ghahramani Gatsby Computational Neuroscience Unit University College London, UK http://www.gatsby.ucl.ac.uk/ and Center for Automated Learning and
Period Three, Chaos and Fractals
 Imperial, May 2012 The Sarkovskii Theorem Let us motivate the so-called Sarkovskii ordering on N 3 5 7 9 2 3 2 5 8 4 2 1. Let f : [0, 1] [0, 1] be continuous and consider successive iterates x n+1 = f
Imperial, May 2012 The Sarkovskii Theorem Let us motivate the so-called Sarkovskii ordering on N 3 5 7 9 2 3 2 5 8 4 2 1. Let f : [0, 1] [0, 1] be continuous and consider successive iterates x n+1 = f
Unit #10 : Graphs of Antiderivatives; Substitution Integrals
 Unit #10 : Graphs of Antiderivatives; Substitution Integrals Goals: Relationship between the graph of f(x) and its anti-derivative F(x) The guess-and-check method for anti-differentiation. The substitution
Unit #10 : Graphs of Antiderivatives; Substitution Integrals Goals: Relationship between the graph of f(x) and its anti-derivative F(x) The guess-and-check method for anti-differentiation. The substitution
Curriculum Area: Mathematics A Level - 2 year course (AQA) Year: 12. Aspire Learn Achieve
 Year: 12. Aspire Learn Achieve") Topics Core 1 - Algebra Core 1 - Coordinate Geometry Core 1 - Differentiation Core 1 - Integration Year Curriculum - Use and manipulate surds - Quadratic functions and their graphs - The discriminant of
Topics Core 1 - Algebra Core 1 - Coordinate Geometry Core 1 - Differentiation Core 1 - Integration Year Curriculum - Use and manipulate surds - Quadratic functions and their graphs - The discriminant of
Lecture 22: Graph-SLAM (2)
") Lecture 22: Graph-SLAM (2) Dr. J.B. Hayet CENTRO DE INVESTIGACIÓN EN MATEMÁTICAS Abril 2014 J.B. Hayet Probabilistic robotics Abril 2014 1 / 35 Outline 1 Data association in Graph-SLAM 2 Improvements and
Lecture 22: Graph-SLAM (2) Dr. J.B. Hayet CENTRO DE INVESTIGACIÓN EN MATEMÁTICAS Abril 2014 J.B. Hayet Probabilistic robotics Abril 2014 1 / 35 Outline 1 Data association in Graph-SLAM 2 Improvements and
Toward Online Probabilistic Path Replanning
 Toward Online Probabilistic Path Replanning R. Philippsen 1 B. Jensen 2 R. Siegwart 3 1 LAAS-CNRS, France 2 Singleton Technology, Switzerland 3 ASL-EPFL, Switzerland Workshop on Autonomous Robot Motion,
Toward Online Probabilistic Path Replanning R. Philippsen 1 B. Jensen 2 R. Siegwart 3 1 LAAS-CNRS, France 2 Singleton Technology, Switzerland 3 ASL-EPFL, Switzerland Workshop on Autonomous Robot Motion,
Mock Exam Künstliche Intelligenz-1. Different problems test different skills and knowledge, so do not get stuck on one problem.
 Name: Matriculation Number: Mock Exam Künstliche Intelligenz-1 January 9., 2017 You have one hour(sharp) for the test; Write the solutions to the sheet. The estimated time for solving this exam is 53 minutes,
Name: Matriculation Number: Mock Exam Künstliche Intelligenz-1 January 9., 2017 You have one hour(sharp) for the test; Write the solutions to the sheet. The estimated time for solving this exam is 53 minutes,
Activation Energy. Notes #22
 Activation Energy Notes #22 Energy (notes) All molecules store chemical-potential energy in the bonds between atoms Some molecules store more chemical energy than others Propane (the gas used in outdoor
Activation Energy Notes #22 Energy (notes) All molecules store chemical-potential energy in the bonds between atoms Some molecules store more chemical energy than others Propane (the gas used in outdoor
Falling Objects and Projectile Motion
 Falling Objects and Projectile Motion Gravity influences motion in a particular way. How does a dropped object behave? accelerate, or speed constant? What if they have: different masses? different shapes?
Falling Objects and Projectile Motion Gravity influences motion in a particular way. How does a dropped object behave? accelerate, or speed constant? What if they have: different masses? different shapes?
Hopfield Networks and Boltzmann Machines. Christian Borgelt Artificial Neural Networks and Deep Learning 296
 Hopfield Networks and Boltzmann Machines Christian Borgelt Artificial Neural Networks and Deep Learning 296 Hopfield Networks A Hopfield network is a neural network with a graph G = (U,C) that satisfies
Hopfield Networks and Boltzmann Machines Christian Borgelt Artificial Neural Networks and Deep Learning 296 Hopfield Networks A Hopfield network is a neural network with a graph G = (U,C) that satisfies
Protein Folding by Robotics
 Protein Folding by Robotics 1 TBI Winterseminar 2006 February 21, 2006 Protein Folding by Robotics 1 TBI Winterseminar 2006 February 21, 2006 Protein Folding by Robotics Probabilistic Roadmap Planning
Protein Folding by Robotics 1 TBI Winterseminar 2006 February 21, 2006 Protein Folding by Robotics 1 TBI Winterseminar 2006 February 21, 2006 Protein Folding by Robotics Probabilistic Roadmap Planning
Machine Learning Basics III
 Machine Learning Basics III Benjamin Roth CIS LMU München Benjamin Roth (CIS LMU München) Machine Learning Basics III 1 / 62 Outline 1 Classification Logistic Regression 2 Gradient Based Optimization Gradient
Machine Learning Basics III Benjamin Roth CIS LMU München Benjamin Roth (CIS LMU München) Machine Learning Basics III 1 / 62 Outline 1 Classification Logistic Regression 2 Gradient Based Optimization Gradient
Inference as Optimization
 Inference as Optimization Sargur Srihari srihari@cedar.buffalo.edu 1 Topics in Inference as Optimization Overview Exact Inference revisited The Energy Functional Optimizing the Energy Functional 2 Exact
Inference as Optimization Sargur Srihari srihari@cedar.buffalo.edu 1 Topics in Inference as Optimization Overview Exact Inference revisited The Energy Functional Optimizing the Energy Functional 2 Exact
BACKPROPAGATION. Neural network training optimization problem. Deriving backpropagation
 BACKPROPAGATION Neural network training optimization problem min J(w) w The application of gradient descent to this problem is called backpropagation. Backpropagation is gradient descent applied to J(w)
BACKPROPAGATION Neural network training optimization problem min J(w) w The application of gradient descent to this problem is called backpropagation. Backpropagation is gradient descent applied to J(w)
Maximum Flow. Jie Wang. University of Massachusetts Lowell Department of Computer Science. J. Wang (UMass Lowell) Maximum Flow 1 / 27
 Maximum Flow 1 / 27") Maximum Flow Jie Wang University of Massachusetts Lowell Department of Computer Science J. Wang (UMass Lowell) Maximum Flow 1 / 27 Flow Networks A flow network is a weighted digraph G = (V, E), where the
Maximum Flow Jie Wang University of Massachusetts Lowell Department of Computer Science J. Wang (UMass Lowell) Maximum Flow 1 / 27 Flow Networks A flow network is a weighted digraph G = (V, E), where the
Ocean Township High School Mathematics Department
 Algebra Summer Assignment Name Period Date Ocean Township High School Mathematics Department These are important topics from Algebra 1 that you must be comfortable doing before you can be successful in
Algebra Summer Assignment Name Period Date Ocean Township High School Mathematics Department These are important topics from Algebra 1 that you must be comfortable doing before you can be successful in
Neural Nets and Symbolic Reasoning Hopfield Networks
 Neural Nets and Symbolic Reasoning Hopfield Networks Outline The idea of pattern completion The fast dynamics of Hopfield networks Learning with Hopfield networks Emerging properties of Hopfield networks
Neural Nets and Symbolic Reasoning Hopfield Networks Outline The idea of pattern completion The fast dynamics of Hopfield networks Learning with Hopfield networks Emerging properties of Hopfield networks
ACTIVITY 3 Introducing Energy Diagrams for Atoms
 Name: Class: SOLIDS & Visual Quantum Mechanics LIGHT ACTIVITY 3 Introducing Energy Diagrams for Atoms Goal Now that we have explored spectral properties of LEDs, incandescent lamps, and gas lamps, we will
Name: Class: SOLIDS & Visual Quantum Mechanics LIGHT ACTIVITY 3 Introducing Energy Diagrams for Atoms Goal Now that we have explored spectral properties of LEDs, incandescent lamps, and gas lamps, we will
Chapter 4. The Laws of Motion
 Chapter 4 The Laws of Motion Classical Mechanics Describes the relationship between the motion of objects in our everyday world and the forces acting on them Conditions when Classical Mechanics does not
Chapter 4 The Laws of Motion Classical Mechanics Describes the relationship between the motion of objects in our everyday world and the forces acting on them Conditions when Classical Mechanics does not
A* Search. 1 Dijkstra Shortest Path
 A* Search Consider the eight puzzle. There are eight tiles numbered 1 through 8 on a 3 by three grid with nine locations so that one location is left empty. We can move by sliding a tile adjacent to the
A* Search Consider the eight puzzle. There are eight tiles numbered 1 through 8 on a 3 by three grid with nine locations so that one location is left empty. We can move by sliding a tile adjacent to the
Translational Mechanical Systems
 Translational Mechanical Systems Basic (Idealized) Modeling Elements Interconnection Relationships -Physical Laws Derive Equation of Motion (EOM) - SDOF Energy Transfer Series and Parallel Connections
Translational Mechanical Systems Basic (Idealized) Modeling Elements Interconnection Relationships -Physical Laws Derive Equation of Motion (EOM) - SDOF Energy Transfer Series and Parallel Connections
Analysis of Algorithms. Outline. Single Source Shortest Path. Andres Mendez-Vazquez. November 9, Notes. Notes
 Analysis of Algorithms Single Source Shortest Path Andres Mendez-Vazquez November 9, 01 1 / 108 Outline 1 Introduction Introduction and Similar Problems General Results Optimal Substructure Properties
Analysis of Algorithms Single Source Shortest Path Andres Mendez-Vazquez November 9, 01 1 / 108 Outline 1 Introduction Introduction and Similar Problems General Results Optimal Substructure Properties
= 1 2 kx2 dw =! F! d! r = Fdr cosθ. T.E. initial. = T.E. Final. = P.E. final. + K.E. initial. + P.E. initial. K.E. initial =
 Practice Template K.E. = 1 2 mv2 P.E. height = mgh P.E. spring = 1 2 kx2 dw =! F! d! r = Fdr cosθ Energy Conservation T.E. initial = T.E. Final (1) Isolated system P.E. initial (2) Energy added E added
Practice Template K.E. = 1 2 mv2 P.E. height = mgh P.E. spring = 1 2 kx2 dw =! F! d! r = Fdr cosθ Energy Conservation T.E. initial = T.E. Final (1) Isolated system P.E. initial (2) Energy added E added
ENERGY IN CHEMISTRY. R. Ashby Duplication by permission only.
 CH 11 TOPIC 28 CHANGING STATES OF MATTER 1 You have mastered this topic when you can: 1) define or describe: ENERGY, POTENTIAL ENERGY, KINETIC ENERGY & KINETIC MOLECULAR THEORY 2) define or describe HEAT
CH 11 TOPIC 28 CHANGING STATES OF MATTER 1 You have mastered this topic when you can: 1) define or describe: ENERGY, POTENTIAL ENERGY, KINETIC ENERGY & KINETIC MOLECULAR THEORY 2) define or describe HEAT
Name: Unit 4 Benchmark Review
 Name: Unit 4 Benchmark Review 1. During science class, Sophie measures the temperature of water every minute as it is heating. After a few minutes, the temperature is 82 C. How far below the boiling point
Name: Unit 4 Benchmark Review 1. During science class, Sophie measures the temperature of water every minute as it is heating. After a few minutes, the temperature is 82 C. How far below the boiling point