Toward Online Probabilistic Path Replanning
|
|
|
- Kory Carpenter
- 5 years ago
- Views:
Transcription
1 Toward Online Probabilistic Path Replanning R. Philippsen 1 B. Jensen 2 R. Siegwart 3 1 LAAS-CNRS, France 2 Singleton Technology, Switzerland 3 ASL-EPFL, Switzerland Workshop on Autonomous Robot Motion, ICRA 2006
2 Outline 1 Algorithm Overview

3 Problem Statement world hard to model closely sensor-based unknown trajectories don t think, act! worst-case risk local collision avoidance
4 Comparison with Known-Trajectory Approaches very cluttered dynamic environments frequent changes to environment model static objects = environment topology hardly predictable movement = risky regions use worst-case scenarios Probabilistic Navigation Function
5 Requirements for PNF static object positions dynamic object positions, shapes, and speeds sensor based circular shapes for simplicity estimated or assumed max speed estimation of co-occurrence probability weighted region planner
6 High-Level Steps Input: Laser scanner data 1: SLIP/ECKF extract and track motion 2: Determine co-occurrence risk 3: E navigation function Output: Direction for reactive obstacle avoidance
7 PNF Architecture



8 align scans robustly detect and track motion
9 Motion Tracking: Challenge and Approach robust tracking despite occlusion and uncertainty compensate ego-motion ICP variant called SLIP probabilistic distance metric constrained object motion multi-object Kalman filter called ECKF topology via particle-filtering [Jensen, 2005]

10 Motion Tracking Flow Diagram

11 Motion Tracking: Environment Constraints

12 Motion Tracking: Videos 1obj ECKF series.wmv environment-constrained particles 3obj ECKF series.wmv tracking robustly through occlusions

13

14 1D
15 1D Case Computations assumptions point object and robot object speed v i discretized process, N = λ r /δ can change direction at each step if (v 1, v 2 ) [ v i, 0) [0, v i ) where v 1,2 = v r (λ i δ) 2λ r p c,m = v 2 v 1 N 1 ( v 2 v i 2Nvi v1 2 )
 λ is topologically correct distance reduce λ by object and robot radii (future")
16 More Realistic Setting N-dimensional (currently 2D) non-point objects and robot, (currently circles) λ is topologically correct distance reduce λ by object and robot radii (future work)
17


18 Interpolated Weighted Path Replanning D [Stentz, 1995] E [Philippsen, 2004] edge costs local cost changes cell costs less local cost changes smooth distance measure
 :")
 : R N R t 0 : Φ( x,")
 = { x Φ( x, t) = 0}.")
19 Level Set Method Interpolation Γ(t) : closed (N 1)D surface Φ( x, t) : R N R t 0 : Φ( x, t = 0) = ±d( x, Γ(t = 0)) Γ(t) = { x Φ( x, t) = 0}... solve: Φ +F Φ = 0 t
 2 + min(d +x i")
 2 + (t C T C ) 2 = h 2 /F")
20 Solving the LSM Equations 1 st order upwind gradient, Fast Marching N i=1 ( max(d x i T ι, 0) 2 + min(d +x i T ι, 0) 2) = 1 F 2 ι (T T A ) 2 + (T T C ) 2 = h 2 /F 2 { T = t A = t C (t A T A ) 2 + (t C T C ) 2 = h 2 /F 2

21 E Demonstration

22 PNF Flow Diagram 1 static objects topology 2 dynamic objects co-occurrence 3 integration risk map 4 E gradient descent

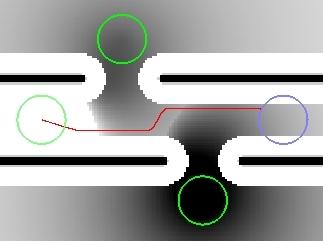

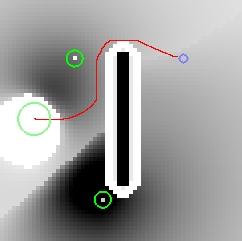
23 PNF Demonstration

24 Fusion and Convolution Quirks low-cost canals at obstacle boundaries strong tendency to hug walls related problem at grid boundary


25 Distance-Correction Step fuse co-occurrences along robot boundary after λ correction
26 approach weighted regions on grid sensor-based world model trade-off risk vs. distance future work resurrect SLIP/ECKF implement new W C transform real-world tests reusability
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
COS Lecture 16 Autonomous Robot Navigation
 COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Gradient Sampling for Improved Action Selection and Path Synthesis
 Gradient Sampling for Improved Action Selection and Path Synthesis Ian M. Mitchell Department of Computer Science The University of British Columbia November 2016 mitchell@cs.ubc.ca http://www.cs.ubc.ca/~mitchell
Gradient Sampling for Improved Action Selection and Path Synthesis Ian M. Mitchell Department of Computer Science The University of British Columbia November 2016 mitchell@cs.ubc.ca http://www.cs.ubc.ca/~mitchell
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments
 Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments Thomas Emter, Arda Saltoğlu and Janko Petereit Introduction AMROS Mobile platform equipped with multiple sensors for navigation
Multi-Sensor Fusion for Localization of a Mobile Robot in Outdoor Environments Thomas Emter, Arda Saltoğlu and Janko Petereit Introduction AMROS Mobile platform equipped with multiple sensors for navigation
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
Robot Localization and Kalman Filters
 Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Robot Localization and Kalman Filters Rudy Negenborn rudy@negenborn.net August 26, 2003 Outline Robot Localization Probabilistic Localization Kalman Filters Kalman Localization Kalman Localization with
Dynamic Obstacle Avoidance using Online Trajectory Time-Scaling and Local Replanning
 Dynamic bstacle Avoidance using nline Trajectory Time-Scaling and Local Replanning Ran Zhao,, Daniel Sidobre, CNRS, LAAS, 7 Avenue du Colonel Roche, F- Toulouse, France Univ. de Toulouse, LAAS, F- Toulouse,
Dynamic bstacle Avoidance using nline Trajectory Time-Scaling and Local Replanning Ran Zhao,, Daniel Sidobre, CNRS, LAAS, 7 Avenue du Colonel Roche, F- Toulouse, France Univ. de Toulouse, LAAS, F- Toulouse,
Improved Action Selection and Path Synthesis using Gradient Sampling
 Improved Action Selection and Path Synthesis using Gradient Sampling Neil Traft and Ian M. Mitchell Department of Computer Science The University of British Columbia December 2016 ntraft@cs.ubc.ca mitchell@cs.ubc.ca
Improved Action Selection and Path Synthesis using Gradient Sampling Neil Traft and Ian M. Mitchell Department of Computer Science The University of British Columbia December 2016 ntraft@cs.ubc.ca mitchell@cs.ubc.ca
Vlad Estivill-Castro. Robots for People --- A project for intelligent integrated systems
 1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
1 Vlad Estivill-Castro Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Probabilistic Map-based Localization (Kalman Filter) Chapter 5 (textbook) Based on textbook
Gaussian Processes as Continuous-time Trajectory Representations: Applications in SLAM and Motion Planning
 Gaussian Processes as Continuous-time Trajectory Representations: Applications in SLAM and Motion Planning Jing Dong jdong@gatech.edu 2017-06-20 License CC BY-NC-SA 3.0 Discrete time SLAM Downsides: Measurements
Gaussian Processes as Continuous-time Trajectory Representations: Applications in SLAM and Motion Planning Jing Dong jdong@gatech.edu 2017-06-20 License CC BY-NC-SA 3.0 Discrete time SLAM Downsides: Measurements
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems
 Robots for People --- A project for intelligent integrated systems") 1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
1 Vlad Estivill-Castro (2016) Robots for People --- A project for intelligent integrated systems V. Estivill-Castro 2 Uncertainty representation Localization Chapter 5 (textbook) What is the course about?
Distributed estimation in sensor networks
 in sensor networks A. Benavoli Dpt. di Sistemi e Informatica Università di Firenze, Italy. e-mail: benavoli@dsi.unifi.it Outline 1 An introduction to 2 3 An introduction to An introduction to In recent
in sensor networks A. Benavoli Dpt. di Sistemi e Informatica Università di Firenze, Italy. e-mail: benavoli@dsi.unifi.it Outline 1 An introduction to 2 3 An introduction to An introduction to In recent
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Robotics 2 Target Tracking. Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard
 Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
Robotics 2 Target Tracking Kai Arras, Cyrill Stachniss, Maren Bennewitz, Wolfram Burgard Slides by Kai Arras, Gian Diego Tipaldi, v.1.1, Jan 2012 Chapter Contents Target Tracking Overview Applications
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Dynamic and Adversarial Reachavoid Symbolic Planning
 Dynamic and Adversarial Reachavoid Symbolic Planning Laya Shamgah Advisor: Dr. Karimoddini July 21 st 2017 Thrust 1: Modeling, Analysis and Control of Large-scale Autonomous Vehicles (MACLAV) Sub-trust
Dynamic and Adversarial Reachavoid Symbolic Planning Laya Shamgah Advisor: Dr. Karimoddini July 21 st 2017 Thrust 1: Modeling, Analysis and Control of Large-scale Autonomous Vehicles (MACLAV) Sub-trust
Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements
 Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
MEM380 Applied Autonomous Robots I Fall BUG Algorithms Potential Fields
 MEM380 Applied Autonomous Robots I Fall BUG Algorithms Potential Fields What s Special About Bugs? Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge of the environment
MEM380 Applied Autonomous Robots I Fall BUG Algorithms Potential Fields What s Special About Bugs? Many planning algorithms assume global knowledge Bug algorithms assume only local knowledge of the environment
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
The Use of Short-Arc Angle and Angle Rate Data for Deep-Space Initial Orbit Determination and Track Association
 The Use of Short-Arc Angle and Angle Rate Data for Deep-Space Initial Orbit Determination and Track Association Dr. Moriba Jah (AFRL) Mr. Kyle DeMars (UT-Austin) Dr. Paul Schumacher Jr. (AFRL) Background/Motivation
The Use of Short-Arc Angle and Angle Rate Data for Deep-Space Initial Orbit Determination and Track Association Dr. Moriba Jah (AFRL) Mr. Kyle DeMars (UT-Austin) Dr. Paul Schumacher Jr. (AFRL) Background/Motivation
UAV Navigation: Airborne Inertial SLAM
 Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS
 Pieter Abbeel UC Berkeley EECS") Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS Many slides adapted from Jur van den Berg Outline POMDPs Separation Principle / Certainty Equivalence Locally Optimal
Partially Observable Markov Decision Processes (POMDPs) Pieter Abbeel UC Berkeley EECS Many slides adapted from Jur van den Berg Outline POMDPs Separation Principle / Certainty Equivalence Locally Optimal
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING
 FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
Vision for Mobile Robot Navigation: A Survey
 Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Vision for Mobile Robot Navigation: A Survey (February 2002) Guilherme N. DeSouza & Avinash C. Kak presentation by: Job Zondag 27 February 2009 Outline: Types of Navigation Absolute localization (Structured)
Localización Dinámica de Robots Móviles Basada en Filtrado de Kalman y Triangulación
 Universidad Pública de Navarra 13 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Localización Dinámica de Robots Móviles Basada en Filtrado de Kalman y Triangulación
Universidad Pública de Navarra 13 de Noviembre de 2008 Departamento de Ingeniería Mecánica, Energética y de Materiales Localización Dinámica de Robots Móviles Basada en Filtrado de Kalman y Triangulación
Robotics. Lecture 4: Probabilistic Robotics. See course website for up to date information.
 Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents
 Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
CONDENSATION Conditional Density Propagation for Visual Tracking
 CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
CONDENSATION Conditional Density Propagation for Visual Tracking Michael Isard and Andrew Blake Presented by Neil Alldrin Department of Computer Science & Engineering University of California, San Diego
Robotics 2 Target Tracking. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robotics 2 Target Tracking Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Linear Dynamical System (LDS) Stochastic process governed by is the state vector is the input vector is the process
Robot Localisation. Henrik I. Christensen. January 12, 2007
 Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
Robot Henrik I. Robotics and Intelligent Machines @ GT College of Computing Georgia Institute of Technology Atlanta, GA hic@cc.gatech.edu January 12, 2007 The Robot Structure Outline 1 2 3 4 Sum of 5 6
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
been developed to calibrate for systematic errors of a two wheel robot. This method has been used by other authors (Chong, 1997). Goel, Roumeliotis an
. Goel, Roumeliotis an") MODELING AND ESTIMATING THE ODOMETRY ERROR OF A MOBILE ROBOT Agostino Martinelli Λ Λ Dipartimento di Informatica, Sistemi e Produzione, Universit a degli Studi di Roma Tor Vergata", Via di Tor Vergata,
MODELING AND ESTIMATING THE ODOMETRY ERROR OF A MOBILE ROBOT Agostino Martinelli Λ Λ Dipartimento di Informatica, Sistemi e Produzione, Universit a degli Studi di Roma Tor Vergata", Via di Tor Vergata,
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
E190Q Lecture 11 Autonomous Robot Navigation
 E190Q Lecture 11 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 013 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 11 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 013 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
A Tree Search Approach to Target Tracking in Clutter
 12th International Conference on Information Fusion Seattle, WA, USA, July 6-9, 2009 A Tree Search Approach to Target Tracking in Clutter Jill K. Nelson and Hossein Roufarshbaf Department of Electrical
12th International Conference on Information Fusion Seattle, WA, USA, July 6-9, 2009 A Tree Search Approach to Target Tracking in Clutter Jill K. Nelson and Hossein Roufarshbaf Department of Electrical
Probabilistic Structure from Sound and Probabilistic Sound Source Localization
 Probabilistic Structure from Sound and Probabilistic Sound Source Localization Chi-Hao Lin and Chieh-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Probabilistic Structure from Sound and Probabilistic Sound Source Localization Chi-Hao Lin and Chieh-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Bayesian Methods in Positioning Applications
 Bayesian Methods in Positioning Applications Vedran Dizdarević v.dizdarevic@tugraz.at Graz University of Technology, Austria 24. May 2006 Bayesian Methods in Positioning Applications p.1/21 Outline Problem
Bayesian Methods in Positioning Applications Vedran Dizdarević v.dizdarevic@tugraz.at Graz University of Technology, Austria 24. May 2006 Bayesian Methods in Positioning Applications p.1/21 Outline Problem
Visualisation of Spatial Data
 Visualisation of Spatial Data VU Visual Data Science Johanna Schmidt WS 2018/19 2 Visual Data Science Introduction to Visualisation Basics of Information Visualisation Charts and Techniques Introduction
Visualisation of Spatial Data VU Visual Data Science Johanna Schmidt WS 2018/19 2 Visual Data Science Introduction to Visualisation Basics of Information Visualisation Charts and Techniques Introduction
Introduction to Mobile Robotics Probabilistic Sensor Models
 Introduction to Mobile Robotics Probabilistic Sensor Models Wolfram Burgard 1 Sensors for Mobile Robots Contact sensors: Bumpers Proprioceptive sensors Accelerometers (spring-mounted masses) Gyroscopes
Introduction to Mobile Robotics Probabilistic Sensor Models Wolfram Burgard 1 Sensors for Mobile Robots Contact sensors: Bumpers Proprioceptive sensors Accelerometers (spring-mounted masses) Gyroscopes
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
CSE 473: Artificial Intelligence Spring 2014
 CSE 473: Artificial Intelligence Spring 2014 Hidden Markov Models Hanna Hajishirzi Many slides adapted from Dan Weld, Pieter Abbeel, Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
CSE 473: Artificial Intelligence Spring 2014 Hidden Markov Models Hanna Hajishirzi Many slides adapted from Dan Weld, Pieter Abbeel, Dan Klein, Stuart Russell, Andrew Moore & Luke Zettlemoyer 1 Outline
Cooperative Motion Control of Multiple Autonomous Marine
 Cooperative Motion Control of Multiple Autonomous Marine Collision Avoidance in Dynamic Environments EECI Graduate School on Control Supélec, Feb. 21-25, 2011 Outline Motivation/Objectives Cooperative
Cooperative Motion Control of Multiple Autonomous Marine Collision Avoidance in Dynamic Environments EECI Graduate School on Control Supélec, Feb. 21-25, 2011 Outline Motivation/Objectives Cooperative
Distributed Data Fusion with Kalman Filters. Simon Julier Computer Science Department University College London
 Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Last Lecture : Edge Detection Preprocessing of image is desired to eliminate or at least minimize noise effects There is always tradeoff
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Scalable Sparsification for Efficient Decision Making Under Uncertainty in High Dimensional State Spaces
 Scalable Sparsification for Efficient Decision Making Under Uncertainty in High Dimensional State Spaces IROS 2017 KHEN ELIMELECH ROBOTICS AND AUTONOMOUS SYSTEMS PROGRAM VADIM INDELMAN DEPARTMENT OF AEROSPACE
Scalable Sparsification for Efficient Decision Making Under Uncertainty in High Dimensional State Spaces IROS 2017 KHEN ELIMELECH ROBOTICS AND AUTONOMOUS SYSTEMS PROGRAM VADIM INDELMAN DEPARTMENT OF AEROSPACE
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles
 Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Probability Map Building of Uncertain Dynamic Environments with Indistinguishable Obstacles Myungsoo Jun and Raffaello D Andrea Sibley School of Mechanical and Aerospace Engineering Cornell University
Weather in the Connected Cockpit
 Weather in the Connected Cockpit What if the Cockpit is on the Ground? The Weather Story for UAS Friends and Partners of Aviation Weather November 2, 2016 Chris Brinton brinton@mosaicatm.com Outline Mosaic
Weather in the Connected Cockpit What if the Cockpit is on the Ground? The Weather Story for UAS Friends and Partners of Aviation Weather November 2, 2016 Chris Brinton brinton@mosaicatm.com Outline Mosaic
Artificial Intelligence
 Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Reasoning Under Uncertainty Over Time. CS 486/686: Introduction to Artificial Intelligence
 Reasoning Under Uncertainty Over Time CS 486/686: Introduction to Artificial Intelligence 1 Outline Reasoning under uncertainty over time Hidden Markov Models Dynamic Bayes Nets 2 Introduction So far we
Reasoning Under Uncertainty Over Time CS 486/686: Introduction to Artificial Intelligence 1 Outline Reasoning under uncertainty over time Hidden Markov Models Dynamic Bayes Nets 2 Introduction So far we
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
Anticipating Visual Representations from Unlabeled Data. Carl Vondrick, Hamed Pirsiavash, Antonio Torralba
 Anticipating Visual Representations from Unlabeled Data Carl Vondrick, Hamed Pirsiavash, Antonio Torralba Overview Problem Key Insight Methods Experiments Problem: Predict future actions and objects Image
Anticipating Visual Representations from Unlabeled Data Carl Vondrick, Hamed Pirsiavash, Antonio Torralba Overview Problem Key Insight Methods Experiments Problem: Predict future actions and objects Image
Lego NXT: Navigation and localization using infrared distance sensors and Extended Kalman Filter. Miguel Pinto, A. Paulo Moreira, Aníbal Matos
 Lego NXT: Navigation and localization using infrared distance sensors and Extended Kalman Filter Miguel Pinto, A. Paulo Moreira, Aníbal Matos 1 Resume LegoFeup Localization Real and simulated scenarios
Lego NXT: Navigation and localization using infrared distance sensors and Extended Kalman Filter Miguel Pinto, A. Paulo Moreira, Aníbal Matos 1 Resume LegoFeup Localization Real and simulated scenarios
Physics-Aware Informative Coverage Planning for Autonomous Vehicles
 Physics-Aware Informative Coverage Planning for Autonomous Vehicles Michael J. Kuhlman 1, Student Member, IEEE, Petr Švec2, Member, IEEE, Krishnanand N. Kaipa 2, Member, IEEE, Donald Sofge 3, Member, IEEE,
Physics-Aware Informative Coverage Planning for Autonomous Vehicles Michael J. Kuhlman 1, Student Member, IEEE, Petr Švec2, Member, IEEE, Krishnanand N. Kaipa 2, Member, IEEE, Donald Sofge 3, Member, IEEE,
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Pacman Sonar (P4) [Demo: Pacman Sonar
CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Wei Xu Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley.] Pacman Sonar (P4) [Demo: Pacman Sonar
Feature extraction: Corners and blobs
 Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Feature extraction: Corners and blobs Review: Linear filtering and edge detection Name two different kinds of image noise Name a non-linear smoothing filter What advantages does median filtering have over
Geometric and probabilistic approaches towards Conflict Prediction
 Geometric and probabilistic approaches towards Conflict Prediction G.J. Bakker, H.J. Kremer and H.A.P. Blom Nationaal Lucht- en Ruimtevaartlaboratorium National Aerospace Laboratory NLR Geometric and probabilistic
Geometric and probabilistic approaches towards Conflict Prediction G.J. Bakker, H.J. Kremer and H.A.P. Blom Nationaal Lucht- en Ruimtevaartlaboratorium National Aerospace Laboratory NLR Geometric and probabilistic
Observability-based Local Path Planning and Collision Avoidance Using Bearing-only Measurements
 Observability-based Local Path Planning and Collision Avoidance Using Bearing-only Measurements Huili Yu a,, Rajnikant Sharma a, Randal W. Beard a, Clark N. Taylor b a Department of Electrical and Computer
Observability-based Local Path Planning and Collision Avoidance Using Bearing-only Measurements Huili Yu a,, Rajnikant Sharma a, Randal W. Beard a, Clark N. Taylor b a Department of Electrical and Computer
CS 5522: Artificial Intelligence II
 CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
CS 5522: Artificial Intelligence II Hidden Markov Models Instructor: Alan Ritter Ohio State University [These slides were adapted from CS188 Intro to AI at UC Berkeley. All materials available at http://ai.berkeley.edu.]
the robot in its current estimated position and orientation (also include a point at the reference point of the robot)
") CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
CSCI 4190 Introduction to Robotic Algorithms, Spring 006 Assignment : out February 13, due February 3 and March Localization and the extended Kalman filter In this assignment, you will write a program
TOWARDS OPTIMAL CONTROL OF SELF-ORGANIZED ROBOTIC INSPECTION SYSTEMS. Nikolaus Correll and Alcherio Martinoli
 TOWARDS OPTIMAL CONTROL OF SELF-ORGANIZED ROBOTIC INSPECTION SYSTEMS Nikolaus Correll and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne, Switzerland [nikolaus.correll
TOWARDS OPTIMAL CONTROL OF SELF-ORGANIZED ROBOTIC INSPECTION SYSTEMS Nikolaus Correll and Alcherio Martinoli Swarm-Intelligent Systems Group École Polytechnique Fédérale de Lausanne, Switzerland [nikolaus.correll
2 Approaches To Developing Design Ground Motions
 2 Approaches To Developing Design Ground Motions There are two basic approaches to developing design ground motions that are commonly used in practice: deterministic and probabilistic. While both approaches
2 Approaches To Developing Design Ground Motions There are two basic approaches to developing design ground motions that are commonly used in practice: deterministic and probabilistic. While both approaches
Tennis player segmentation for semantic behavior analysis
 Proposta di Tennis player segmentation for semantic behavior analysis Architettura Software per Robot Mobili Vito Renò, Nicola Mosca, Massimiliano Nitti, Tiziana D Orazio, Donato Campagnoli, Andrea Prati,
Proposta di Tennis player segmentation for semantic behavior analysis Architettura Software per Robot Mobili Vito Renò, Nicola Mosca, Massimiliano Nitti, Tiziana D Orazio, Donato Campagnoli, Andrea Prati,
with Application to Autonomous Vehicles
 Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Predictive Planning for a Mobile Robot in Human Environments
 Predictive Planning for a Mobile Robot in Human Environments Andrey Rudenko 1, Luigi Palmieri 1,2 and Kai O. Arras 2 Abstract Generating short and safe paths for mobile robots operating in crowded spaces
Predictive Planning for a Mobile Robot in Human Environments Andrey Rudenko 1, Luigi Palmieri 1,2 and Kai O. Arras 2 Abstract Generating short and safe paths for mobile robots operating in crowded spaces
On Motion Models for Target Tracking in Automotive Applications
 On Motion Models for Target Tracking in Automotive Applications Markus Bühren and Bin Yang Chair of System Theory and Signal Processing University of Stuttgart, Germany www.lss.uni-stuttgart.de Abstract
On Motion Models for Target Tracking in Automotive Applications Markus Bühren and Bin Yang Chair of System Theory and Signal Processing University of Stuttgart, Germany www.lss.uni-stuttgart.de Abstract
The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance. Samuel Prentice and Nicholas Roy Presentation by Elaine Short
 The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance Samuel Prentice and Nicholas Roy Presentation by Elaine Short 1 Outline" Motivation Review of PRM and EKF Factoring the
The Belief Roadmap: Efficient Planning in Belief Space by Factoring the Covariance Samuel Prentice and Nicholas Roy Presentation by Elaine Short 1 Outline" Motivation Review of PRM and EKF Factoring the
Robust Motion Planning using Markov Decision Processes and Quadtree Decomposition
 Robust Motion Planning using Markov Decision Processes and Quadtree Decomposition Julien Burlet, Olivier Aycard 1 and Thierry Fraichard 2 Inria Rhône-Alpes & Gravir Lab., Grenoble (FR) {julien.burlet &
Robust Motion Planning using Markov Decision Processes and Quadtree Decomposition Julien Burlet, Olivier Aycard 1 and Thierry Fraichard 2 Inria Rhône-Alpes & Gravir Lab., Grenoble (FR) {julien.burlet &
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Edges and Scale. Image Features. Detecting edges. Origin of Edges. Solution: smooth first. Effects of noise
 Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
Edges and Scale Image Features From Sandlot Science Slides revised from S. Seitz, R. Szeliski, S. Lazebnik, etc. Origin of Edges surface normal discontinuity depth discontinuity surface color discontinuity
CSEP 573: Artificial Intelligence
 CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
System identification and sensor fusion in dynamical systems. Thomas Schön Division of Systems and Control, Uppsala University, Sweden.
 System identification and sensor fusion in dynamical systems Thomas Schön Division of Systems and Control, Uppsala University, Sweden. The system identification and sensor fusion problem Inertial sensors
System identification and sensor fusion in dynamical systems Thomas Schön Division of Systems and Control, Uppsala University, Sweden. The system identification and sensor fusion problem Inertial sensors
Algorithms for Sensor-Based Robotics: Potential Functions
 Algorithms for Sensor-Based Robotics: Potential Functions Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager The Basic Idea A really simple idea:
Algorithms for Sensor-Based Robotics: Potential Functions Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager The Basic Idea A really simple idea:
8 Lidars and wind turbine control
 8 Lidars and wind turbine control David Schlipf, Oliver Bischoff, Martin Hofsäß, Andreas Rettenmeier, Juan José Trujillo, and Martin Kühn Endowed Chair of Wind Energy, Institute of Aircraft Design, Universität
8 Lidars and wind turbine control David Schlipf, Oliver Bischoff, Martin Hofsäß, Andreas Rettenmeier, Juan José Trujillo, and Martin Kühn Endowed Chair of Wind Energy, Institute of Aircraft Design, Universität
Context Driven Tracking using Particle Filters
 18th International Conference on Information Fusion Washington, DC - July 6-9, 2015 Context Driven Tracking using Particle Filters Rik Claessens, Gregor Pavlin and Patrick de Oude University of Liverpool,
18th International Conference on Information Fusion Washington, DC - July 6-9, 2015 Context Driven Tracking using Particle Filters Rik Claessens, Gregor Pavlin and Patrick de Oude University of Liverpool,
Spatial Transformation
 Spatial Transformation Presented by Liqun Chen June 30, 2017 1 Overview 2 Spatial Transformer Networks 3 STN experiments 4 Recurrent Models of Visual Attention (RAM) 5 Recurrent Models of Visual Attention
Spatial Transformation Presented by Liqun Chen June 30, 2017 1 Overview 2 Spatial Transformer Networks 3 STN experiments 4 Recurrent Models of Visual Attention (RAM) 5 Recurrent Models of Visual Attention
Hidden Markov Models. Vibhav Gogate The University of Texas at Dallas
 Hidden Markov Models Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1
Hidden Markov Models Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1
Distributed Robust Localization from Arbitrary Initial Poses via EM and Model Selection
 1 Distributed Robust Localization from Arbitrary Initial Poses via EM and Model Selection Vadim Indelman Collaborators: Erik Nelson, Jing Dong, Nathan Michael and Frank Dellaert IACAS, February 15 Collaborative
1 Distributed Robust Localization from Arbitrary Initial Poses via EM and Model Selection Vadim Indelman Collaborators: Erik Nelson, Jing Dong, Nathan Michael and Frank Dellaert IACAS, February 15 Collaborative
The Kalman Filter (part 1) Definition. Rudolf Emil Kalman. Why do we need a filter? Definition. HCI/ComS 575X: Computational Perception.
 Definition. Rudolf Emil Kalman. Why do we need a filter? Definition. HCI/ComS 575X: Computational Perception.") The Kalman Filter (part 1) HCI/ComS 575X: Computational Perception Instructor: Alexander Stoytchev http://www.cs.iastate.edu/~alex/classes/2007_spring_575x/ March 5, 2007 HCI/ComS 575X: Computational Perception
The Kalman Filter (part 1) HCI/ComS 575X: Computational Perception Instructor: Alexander Stoytchev http://www.cs.iastate.edu/~alex/classes/2007_spring_575x/ March 5, 2007 HCI/ComS 575X: Computational Perception
Introduction to Mobile Robotics Information Gain-Based Exploration. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras
 Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
RESEARCH SUMMARY ASHKAN JASOUR. February 2016
 RESEARCH SUMMARY ASHKAN JASOUR February 2016 My background is in systems control engineering and I am interested in optimization, control and analysis of dynamical systems, robotics, machine learning,
RESEARCH SUMMARY ASHKAN JASOUR February 2016 My background is in systems control engineering and I am interested in optimization, control and analysis of dynamical systems, robotics, machine learning,
Sensors Fusion for Mobile Robotics localization. M. De Cecco - Robotics Perception and Action
 Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Uncertainty of Line Segments Extracted from Static SICK PLS Laser Scans
 Uncertainty of Line Segments Extracted from Static SICK PLS Laser Scans Albert Diosi and Lindsay Kleeman Intelligent Robotics Research Centre Department of Electrical and Computer Systems Engineering Monash
Uncertainty of Line Segments Extracted from Static SICK PLS Laser Scans Albert Diosi and Lindsay Kleeman Intelligent Robotics Research Centre Department of Electrical and Computer Systems Engineering Monash
A Two-Stage Approach to Multi-Sensor Temporal Data Fusion
 A Two-Stage Approach to Multi-Sensor Temporal Data Fusion D.Hutber and Z.Zhang INRIA, 2004 Route des Lucioles, B.P.93, 06902 Sophia Antipolis Cedex, France. dhutber@sophia.inria.fr, zzhangosophia.inria.fr
A Two-Stage Approach to Multi-Sensor Temporal Data Fusion D.Hutber and Z.Zhang INRIA, 2004 Route des Lucioles, B.P.93, 06902 Sophia Antipolis Cedex, France. dhutber@sophia.inria.fr, zzhangosophia.inria.fr
A nonlinear filtering tool for analysis of hot-loop test campaings
 A nonlinear filtering tool for analysis of hot-loop test campaings Enso Ikonen* Jenő Kovács*, ** * Systems Engineering Laboratory, Department of Process and Environmental Engineering, University of Oulu,
A nonlinear filtering tool for analysis of hot-loop test campaings Enso Ikonen* Jenő Kovács*, ** * Systems Engineering Laboratory, Department of Process and Environmental Engineering, University of Oulu,
Equilibrium of a Rigid Body. Chapter 5
 Equilibrium of a Rigid Body Chapter 5 Overview Rigid Body Equilibrium Free Body Diagrams Equations of Equilibrium 2 and 3-Force Members Statical Determinacy CONDITIONS FOR RIGID-BODY EQUILIBRIUM Recall
Equilibrium of a Rigid Body Chapter 5 Overview Rigid Body Equilibrium Free Body Diagrams Equations of Equilibrium 2 and 3-Force Members Statical Determinacy CONDITIONS FOR RIGID-BODY EQUILIBRIUM Recall
Human Pose Tracking I: Basics. David Fleet University of Toronto
 Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Probabilistic Cardinal Direction Queries On Spatio-Temporal Data
 Probabilistic Cardinal Direction Queries On Spatio-Temporal Data Ganesh Viswanathan Midterm Project Report CIS 6930 Data Science: Large-Scale Advanced Data Analytics University of Florida September 3 rd,
Probabilistic Cardinal Direction Queries On Spatio-Temporal Data Ganesh Viswanathan Midterm Project Report CIS 6930 Data Science: Large-Scale Advanced Data Analytics University of Florida September 3 rd,
A motion planner for nonholonomic mobile robots
 A motion planner for nonholonomic mobile robots Miguel Vargas Material taken form: J. P. Laumond, P. E. Jacobs, M. Taix, R. M. Murray. A motion planner for nonholonomic mobile robots. IEEE Transactions
A motion planner for nonholonomic mobile robots Miguel Vargas Material taken form: J. P. Laumond, P. E. Jacobs, M. Taix, R. M. Murray. A motion planner for nonholonomic mobile robots. IEEE Transactions
CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering
 CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering Cengiz Günay, Emory Univ. Günay Ch. 15,20 Hidden Markov Models and Particle FilteringSpring 2013 1 / 21 Get Rich Fast!
CS325 Artificial Intelligence Ch. 15,20 Hidden Markov Models and Particle Filtering Cengiz Günay, Emory Univ. Günay Ch. 15,20 Hidden Markov Models and Particle FilteringSpring 2013 1 / 21 Get Rich Fast!
Formation Control of Mobile Robots with Obstacle Avoidance using Fuzzy Artificial Potential Field
 Formation Control of Mobile Robots with Obstacle Avoidance using Fuzzy Artificial Potential Field Abbas Chatraei Department of Electrical Engineering, Najafabad Branch, Islamic Azad University, Najafabad,
Formation Control of Mobile Robots with Obstacle Avoidance using Fuzzy Artificial Potential Field Abbas Chatraei Department of Electrical Engineering, Najafabad Branch, Islamic Azad University, Najafabad,
Robotics 2 Data Association. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Vision-based navigation around small bodies
 Astronet-II, International Final Conference Vision-based navigation around small bodies Pawel Kicman VISION-BASED NAVIGATION IN SPACE Camera LOS (Line-of-sight) sensor Star-horizon measurements Apparent
Astronet-II, International Final Conference Vision-based navigation around small bodies Pawel Kicman VISION-BASED NAVIGATION IN SPACE Camera LOS (Line-of-sight) sensor Star-horizon measurements Apparent
Semantic maps - a multi-hierarchical model
 - a multi-hierarchical model 64.425 Integrated Seminar: Intelligent Robotics Paul Anton Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
- a multi-hierarchical model 64.425 Integrated Seminar: Intelligent Robotics Paul Anton Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme
Navigation. Global Pathing. The Idea. Diagram I: Overall Navigation
 Navigation Diagram I: Overall Navigation Global Pathing The Idea (focus on 2D coordinates Takes advantage of prior info: navigation space/ dimensions target destination location Risks: Map Resolution too
Navigation Diagram I: Overall Navigation Global Pathing The Idea (focus on 2D coordinates Takes advantage of prior info: navigation space/ dimensions target destination location Risks: Map Resolution too
Parking Place Inspection System Utilizing a Mobile Robot with a Laser Range Finder -Application for occupancy state recognition-
 Parking Place Inspection System Utilizing a Mobile Robot with a Laser Range Finder -Application for occupancy state recognition- Sanngoen Wanayuth, Akihisa Ohya and Takashi Tsubouchi Abstract The automated
Parking Place Inspection System Utilizing a Mobile Robot with a Laser Range Finder -Application for occupancy state recognition- Sanngoen Wanayuth, Akihisa Ohya and Takashi Tsubouchi Abstract The automated