Chapter 9: Bayesian Methods. CS 336/436 Gregory D. Hager
|
|
|
- Logan Logan
- 6 years ago
- Views:
Transcription
1 Chapter 9: Bayesian Methods CS 336/436 Gregory D. Hager

2


3 A Simple Eample





4 Why Not Just Use a Kalman Filter?
5 Recall Robot Localization Given Sensor readings y 1, y 2, y = y 1: Known control inputs u 0, u 2,.. u = u 0: Known model P( t+1 t, u t ) with initial P( 1 u 0 ) Known map P(y t t ) Compute P( t y 1:t-1, u 0:t-1 ) Most liely sensor reading given state Most liely state at time t given a sequence of commands u 0:t-1 and measurements y 1:t-1 This is just a probabilistic representation of what you ve already learned! Let s try to connect the dots and do a couple of eamples
6 Some Probability Reminders P(,y) = P( y) P(y) ò P() = y P(, y) = y P( y) P(y) If is independent of z given y P( y, z) = P( y) Two important assumptions 1. Marov P( 1,, 0) P( 1) 2. Observation P( y,, 0) P( y ) ò P(Y) wiipedia P(X)

 Find P( y 1:, u 0:-1 ) u 0 u -2 u -1 0-2 -1 y")
7 Bayes Filter Given a sequence of measurements y 1,, y and a sequence of commands u 0,, u -1 : { y 1:, u 0:-1 } Given a sensor model P( y ) Given a dynamic model P( -1 ) Given a prior probability P( 0 ) Find P( y 1:, u 0:-1 ) u 0 u -2 u y -2 y -1 y
8 Recall Bayes Theorem: Bayesian Localization P( y ) = P(y ) P()/ P(y) Also remember conditional independence Thin of as the state of the robot and y as the data we now P( u 0:-1, y 1: ) Posterior Probability Distribution P( u 0:-1, y 1: ) = P(y, u 0:-1, y 1:-1 ) P( u 0:-1, y 1:-1 ) / P(y u 0:-1, y 1:-1 ) = h P(y ) -1 P( u -1, -1 ) P( -1 u 0:-2, y 1:-1 ) observation state prediction recursive instance
9 A Simple Eample
10 Ways of Representing Probabilities We have already seen Kalman filters represent probabilities as Gaussians Gaussians are conjugate distributions How arbitrary distributions are represented? Mitures of Gaussians Suppose instead state space is partitioned and probability in partition is constant P( y ) = P(y ) P() / P(y) P( i y) = h P(y i ) P( i ) h = i P(y i ) P( i ) Thus, updating from observations is a simple multiplication of prior probability by lielihood of observation P( i () u(-1:0), y(-1)) = j P( i () u(-1), j (-1)) P( j (-1) u(-2:0), y(-1)) Thus, updating using dynamical model is simply a discrete convolution (blurring) of the prior by the driving noise of the planned motion A blast from the past:
11 How Do We Thin about Motion? Suppose we have P( ) We have P( +1, u ) Put together P( +1 ) = ò P( +1, u ) P( ) d What is the probability distribution for +1 given the command u and all the previous states?
 of the prior by the driving noise of")

12 Piecewise Constant Representation Updating from observations is a simple multiplication of prior probability by lielihood of observation Updating using dynamical model is simply a discrete convolution (blurring) of the prior by the driving noise of the planned motion Updating from observations is a simple multiplication of prior probability by lielihood of observation Updating using dynamical model is simply a discrete convolution (blurring) of the prior by the driving noise of the planned motion
13 Piecewise Constant Representation (Mobile Robot) Bel( =<, y, q > ) t Position of a mobile robot: (, y, q)
14 Propagating Motion Prior P( ) State space X = { 1, 2, 3, 4} P( ) 0.5 P( +1, u ) X +1 =1 X +1 =2 X +1 =3 X +1 =4 X = X = X = X = Compute Transition matri: The probability P(j i) of moving from i to j is given by P i,j. Each row must sum to 1. P ) ( 1) P( 1, u ) P( d
15 Propagating Motion State space X = { 1, 2, 3, 4} P( +1, u ) X +1 =1 X +1 =2 X +1 =3 X +1 =4 X = X = X = X = P( ) Prior P( ) ) ( ) 4, 1 ( 3) ( ) 3, 1 ( 2) ( ) 2, 1 ( 1) ( ) 1, 1 ( ) ( ), 1 ( 1) ( X P u P P u P P u P P u P P u P P
16 Propagating Motion State space X = { 1, 2, 3, 4} P( +1, u ) X +1 =1 X +1 =2 X +1 =3 X +1 =4 X = X = X = X = P( ) Prior P( ) ) ( ) 4, 2 ( 3) ( ) 3, 2 ( 2) ( ) 2, 2 ( 1) ( ) 1, 2 ( ) ( ), 2 ( 2) ( X P u P P u P P u P P u P P u P P
17 Propagating Motion State space X = { 1, 2, 3, 4} P( +1, u ) X +1 =1 X +1 =2 X +1 =3 X +1 =4 X = X = X = X = P( ) Prior P( ) P( 1 3) P( P( P( P( X P( , u 1, u 2, u 3, u 4, u ) P( ) P( ) P( ) P( ) P( ) 1) 2) 3) 4)
18 Propagating Motion State space X = { 1, 2, 3, 4} P( +1, u ) X +1 =1 X +1 =2 X +1 =3 X +1 =4 X = X = X = X = P( ) Prior P( ) ) ( ) 4, 4 ( 3) ( ) 3, 4 ( 2) ( ) 2, 4 ( 1) ( ) 1, 4 ( ) ( ), 4 ( 4) ( X P u P P u P P u P P u P P u P P
19 Propagating Motion P( +1 ) P ) ( 1) P( 1, u ) P( d
 P( y ) P i ( ) 9. h = h + P() 10. end for 11. for all states X 12. P() = P() / h 13. end for 14. end for Prediction given prior dist.")
20 Discrete Bayes Filter Algorithm Algorithm Discrete_Bayes_filter( u 0:-1, y 1:, P( 0 ) ) 1. P() = P( 0 ) 2. for i=1: 3. for all states X 4. P ( ) P( u i1, ) P( ) 5. end for X 6. h=0 7. for all states X 8. P( ) P( y ) P i ( ) 9. h = h + P() 10. end for 11. for all states X 12. P() = P() / h 13. end for 14. end for Prediction given prior dist. and command Update using measurement Normalize to 1

21 Note About the Posterior It is a probability distribution P() What do we do with it? Maimum lielihood: Mean Squared Error: arg ma P( z ) E[( P( ) P( ˆ)) 2 ]
22 Bayes Filter Ingredients Motion model P( -1, u -1 ) Observation model P( y ) Bayes estimator MAP, MSE,
23 How To Get Lielihoods? How do we get p(y )? In the discrete case, is a fied value For a fied value and *nown* map, we can predict/simulate sensor readings y* (recall y = h() + v) But, we now y* - y ~ v for whatever distribution v has v is Gaussian with covariance L, then P(y ) = G(y*-y ; 0, L) v could be represented with an empirical histogram; P(y ) is a table looup
24 Grid-based Localization


25 Sonars and Occupancy Grid Map
26 Localization Algorithms - Comparison Kalman filter Multi-hypothesis tracing Grid-based (fied/variable) Sensors Gaussian Gaussian Non-Gaussian Posterior Gaussian Multi-modal Piecewise constant Efficiency (memory) /+ Efficiency (time) o/+ Implementation + o +/o Accuracy /++ Robustness Global localization No Yes Yes
27 Particle Filters Represent belief by random samples Estimation of non-gaussian, nonlinear processes Monte Carlo filter, Survival of the fittest, Condensation, Bootstrap filter, Particle filter Filtering: [Rubin, 88], [Gordon et al., 93], [Kitagawa 96] Computer vision: [Isard and Blae 96, 98] Dynamic Bayesian Networs: [Kanazawa et al., 95]d
28 Sample-based Density Representation
29 draw i t1 from Bel( t1 ) draw i t from p( t i t1,u t1 ) Importance factor for i t: ) ( ) ( ), ( ) ( ), ( ) ( distribution proposal target distribution t t t t t t t t t t t t i t z p Bel u p Bel u p z p w µ = = h ) ( ), ( ) ( ) ( ò = t t t t t t t t d Bel u p z p Bel h Particle Filter Algorithm
30 Monte Carlo Localization Monte-Carlo-Localization(a, z, N, map) S = N samples from P(X(t)) from previous call for i = 1 to N S[i] = sample from P(X(t+1) X(t) = S[i], A = a) W[i] = 1 for j = 1 to M do z* = epected-sensor-reading(j,s[i],map) W[i] = W[i] * P(Z = z(j) Z* = Z*) S = weighted-sample-with-replacement(n, S, W) return S Note that S is a discrete representation of the probability of robot location
31 The Liehihood Function Generating the sensor lielihood is essentially a sensor simulation can be epensive pre-compute approimate A good fast approimation is often a weighted sum of a nominal model that is fast to compute other deviations that are modeled as random elements
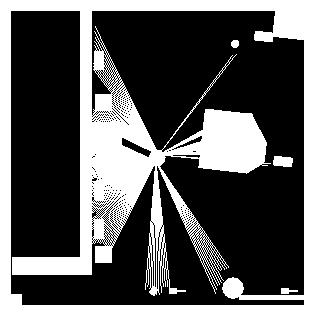
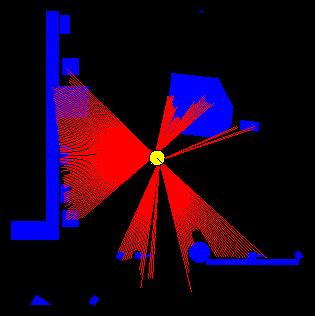
32 Proimity Sensor Model Tuned model that taes into account normal reflection, unepected returns and randomness and out of range Laser sensor Sonar sensor
33 Resampling Given: Set S of weighted samples. Wanted : Random sample, where the probability of drawing i is given by w i. Typically done n times with replacement to generate new sample set S.
34 Resampling W n-1 w n w 1 w 2 W n-1 w n w 1 w 2 w 3 w 3 Roulette wheel Binary search, log n Stochastic universal sampling Systematic resampling Linear time compleity Easy to implement, low variance
35 Resampling Algorithm 1. Algorithm systematic_resampling(s,n): 1 2. S ' = Æ, c1 = w 3. For i = 2 n Generate cdf i 4. c i = ci -1 + w 5. u 1 ~ U[0,1 / n], i = 1 Initialize threshold 6. For j =1 n Draw samples 7. While ( u j > c i ) Sip until net threshold reached 8. i = i S' = S'È { < i,1 / n > } Insert 10. u j = u j +1/ n Increment threshold 11. Return S Also called stochastic universal sampling
36 Motion Model Reminder Start

37 Sample-based Localization (sonar)
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53

54
55
56

57

58 Using Ceiling Maps for Localization [Dellaert et al. 99]

59 Ceiling Light Localization

60 Vision-based Localization z P(z ) h()


61 Under a Light Measurement z: P(z ):


62 Net to a Light Measurement z: P(z ):
63 Elsewhere Measurement z: P(z ):
64 Sample-based Localization Demos
65 Localization Algorithms - Comparison Kalman filter Multi-hypothesis tracing Topological maps Grid-based (fied/variable) Particle filter Sensors Gaussian Gaussian Features Non-Gaussian Non-Gaussian Posterior Gaussian Multi-modal Piecewise constant Piecewise constant Samples Efficiency (memory) /+ +/++ Efficiency (time) o/+ +/++ Implementation + o + +/o ++ Accuracy /++ ++ Robustness /++ Global localization No Yes Yes Yes Yes
66 Bayes Filters for Robot Localization Grid fied/variable resolution Topological Kalman filter Etended / unscented Kalman filter Piecewise constant approimation Arbitrary posteriors Non-linear dynamics/observations Optimal, converges to true posterior Eponential in state dimensions Global localization Abstract state space Arbitrary, discrete posteriors Abstract dynamics/observations One-dimensional graph Global localization First and second moment Linear dynamics/observations Optimal (linear, Gaussian) Quadratic in state dimension Position tracing First and second moment Non-linear dynamics/observ. Not optimal (linear appro.) Quadratic in state dimension Position tracing Particle filter Sample-based approimation Arbitrary posteriors Non-linear dynamics/observations Optimal, converges to true posterior Eponential in state dimensions Global localization Multi-hypothesis tracing (EKF) Multi-modal Gaussian Non-linear dynamics/observations Not optimal (linear appro.) Polynomial in state dimension Global localization Discrete Bayes filters Continuous




67 Some Maps
68 Problems in Mapping Sensor interpretation How do we etract relevant information from raw sensor data? How do we represent and integrate this information over time? Do we map for the purpose of localization or do we map for human consumption (dense vs sparse)? Robot locations have to be nown How can we estimate them during mapping?

69 Occupancy Grid Maps Introduced by Moravec and Elfes in 1985 Represent environment by a grid. Estimate the probability that a location is occupied by an obstacle. Key assumptions Occupancy of individual cells is independent Bel(m t ) = P(m t (1: ), y(1: )) Õ,y = Bel(m t [ y] (1: ), y(1: )) Robot positions (1:) are nown!
70 The Basic Intuition A ray that flies through an area of space indicates that the space is probably free A ray where that reflects at a point indicates something there Otherwise, we don t now
71 One Idea: Simple Counting For every cell count hits(,y): number of cases where a beam ended at <,y> misses(,y): number of cases where a beam passed through <,y> Bel( m [ y] ) = hits(, y) hits(, y) + misses(, y) Assumption: P(occupied(,y)) = P(reflects(,y)) Many cases where this is not a good approimation e.g. sonar reflection model
72 Updating Occupancy Grid Maps Note that the following also can be derived: P(Øm [y] (1: ), y(1: )) = P(Øm [y] y(), ())P(y() ())P(Øm [y] (1: - 1), y(1: - 1)) Now, consider the odds ratio: O(m [ y] (1: ), y(1: )) = P( ) Odds( ) 1 P( ) P( ) P( ) ho(m [y] y(), ())O(m [ y] (1: - 1), y(1: - 1)) inverse sensor model Prior odds
73 Updating Occupancy Grid Maps Typically updated using inverse sensor model and log odds ratio (log ab = log a + log b) log O( m (1: ), y(1: )) log O( m ( ), y( )) log O( m (1: 1), y(1: 1)) logh and then recover the probability with P( ) 1 1 Odds( ) 1 P( m (1: ), y(1: )) 1 P( m ( ), y( )) h 1 P( m (1: 1), y(1: 1) 1 ( ( ), ( ) 1 ( (1: 1), (1: 1) P m y h P m y 1
 P( ) then specify P( m l ( ), y( )), which is the probability of cell m l is occupied given the measurement y() in")
74 The Inverse Sensor Model The probability a cell is occupied given observation and localization P( m ( ), y( )) Assume that all cells are independent l P ( m) P( ) then specify P( m l ( ), y( )), which is the probability of cell m l is occupied given the measurement y() in position () m l

75 Learning Inverse Sensor Model Learn probabilities with neural networ. Consider four beams simultaneously. [Thrun 98]
76 Occupancy Grid Algorithm Algorithm Occupancy_grid( 1:, y 1:, P 0 (m) ): 1. P m = P 0 (m) 2. for i=1 to ) ( ), ( ( )) ( ), ( ( 1 1 m m m P P y m P y m P P h h

77 Occupancy Grids: From scans to maps

78 Tech Museum, San Jose CAD map occupancy grid map

79 Concurrent Mapping and Localization Chicen-and-egg problem Mapping with nown poses is simple Localization with nown map is simple But in combination the problem is hard! 70 m
) º P((1: ), m u(0 : -1), y(1: )) Bel(m, ()) = h p(y() m, ()) ò p(() ( -1),u( -1))Bel(m, ( -1)) d t-1 Tae this")
 m [] ] = E m [ ][log p((1: ) m [],u(0 : -1), y(1: ))] [ +1] m = argma m Localization (bi-directional) Q")
80 Mapping with Epectation Maimization Idea: Maimum lielihood with unnown data association. Bel(m, ()) º P((1: ), m u(0 : -1), y(1: )) Bel(m, ()) = h p(y() m, ()) ò p(() ( -1),u( -1))Bel(m, ( -1)) d t-1 Tae this apart: first estimate location given map, then estimate map given location EM: Maimize log-lielihood by iterating E-step: M-step: Q[(1: ) m [] ] = E m [ ][log p((1: ) m [],u(0 : -1), y(1: ))] [ +1] m = argma m Localization (bi-directional) Q [(1: ) m [] ] Mapping with nown poses

81 EM Mapping, Eample (width 45 m)
82 CSIRO
83 SLAM Idea: Given the true trajectory of the robot, all landmar detections are independent. P((1:),m u(0:-1),y(1:)) = P(m (1:), y(1:), u(0:-1)) P((1:) y(1:) u(0:-1)) = P(m (1:),y(1:)) P((1:) y(1:),u(0:-1)) The first term is easy (mapping given location and data) The second term is easy (predict location from prior data) The hard part: we now have to represent distributions on *trajectories*! We can use Rao-Blacwellised particle filters to estimate robot locations and landmar locations. (FastSLAM, Montemerlo) Update can be done efficiently (O(m log n)).
84 Sufficient Statistic A statistic is a function T(X 1,X 2, X n ) of the random samples X 1,X 2,,X n Eamples: X 1 n n i1 X i s 2 1 n 1 n X i X i1 T ma X1, X 2,..., 2 X n
85 Sufficient Statistic Given X 1,X 2,,X n, is there a small set of statistics that can contain all the information about the samples? If f q () is a probability distribution (q is parameter), then T is a sufficient statistic for q if we can factorize f q ( ) h( ) g ( T( )) If T is a sufficient statistic then it contain all the information to compute an estimate of q q Function of the statistic Not a function of q
86 Sufficient Statistic Given X 1,X 2,,X n, is there a statistic that can contain all the information about the samples? Poisson distribution: X 1,X 2,,X n are independent samples from a Poisson distribution with parameter l. Then a sufficient statistic T(X) of l is T( X ) i1 Note that T(X) does not depend on l n X i
87 Sufficient Statistic Given X 1,X 2,,X n, is there a statistic that can contain all the information about the samples? Eponential distribution: X 1,X 2,,X n are independent and eponentially distributed with epected value l. Then a sufficient statistic T(X) of l is T( X ) i1 Note that T(X) does not depend on l n X i
88 Rao-Blacwell Theorem Improve the efficiency of an estimator by taing its conditional epectation with respect to a sufficient statistic Estimator qˆ ( X ) : Is a statistic (rule) used to estimate an unobservable parameter q in a population The average of N random samples is an estimator of the population s average (i.e. height) Sufficient statistic T(X): Given T(X), the distribution of observable samples X does not depends on the unobservable parameter q Rao Blacwell estimator of q is defined by ˆ q ( X ) R E[ ˆ( q X ) T( X )] and has better mean squared error than qˆ ( X )
89 What About SLAM? Recall the Bayes filtering problem. The posterior satisfies the recursion P( z0: y1: ) hp( y z ) P( z z 1) P( z0: 1 y1: 1) 1 where z is hidden (put up with z instead of for now) That integral is often not tractable and numeric approimations with samples is often used z
90 Marginalize the State Space in Two Suppose we can divide z in two groups: and m such that P(z z -1 ) = P(m -1:, m -1 )P( -1 ) and assume that P(m 0: y 1:, 0: ) is tractable Then we can marginalize 0: from the posterior and focus on estimating P( 0: y 1: ) which is a smaller problem. Essentially we convert the problem to P( 0:, m 0: y 1: ) = P(m 0: y 1:, 0: ) P( 0: y 1: ) Optimal Filt. Particle Filt. and the posterior distribution of P( 0: y 1: ) is given P ( 0: y1: ) n P( y ) P( 1) P( 0: 1 y1: 1 The dimension of P( 0: y 1: ) is smaller than P( 0:, m 0: y 1: ) 1 )
91 Rao-Blacwellized SLAM Compute a posterior over the map and possible trajectories of the robot : map and trajectory p( 1 :, m y1:, u0: 1) measurements p( m 1 :, y1:, u0: t1) p( 1: y1:, u0: 1) mapping Localization map robot motion trajectory Begin Courtesy Dieter Fo
92 A Graphical Model of Rao-Blacwellized SLAM If we now the map Estimate localize at each step 1: If we now locations 1: Compute the map Particle filtering Each particle represent the posterior trajectory Compute the map corresponding to the particle s trajectory Particle s weight is given by the most lielihood of the most recent observation given the map 0 m u u u 0 1 t y 1 y 2 t y t Courtesy Dieter Fo
93 Rao-Blacwellized SLAM Brea it down even further if a map m consists of N individual landmars l i = N(m i, S i ) then P( 1:,m y 1:, u 0:-1 ) =P( 1: y 1:, u 0:-1 )P(m 1:,y 1:, u 0:-1 ) N (mi, Si ) Rao-Blacwellized particle filter (RBPF) maintains an individual map for each sample and updates this map based on the trajectory estimate of the sample Landmar are filtered individually and have low dimensionality If M particles with N landmars there is NM landmar filters i
94 FastSLAM Particle #1 Robot Pose, y, q Kalman Filters m 1, S 1 m 2, S 2 m N, S N Particle #2, y, q m 1, S 1 m 2, S 2 m N, S N Particle #3, y, q m 1, S 1 m 2, S 2 m N, S N Particle M, y, q m 1, S 1 m 2, S 2 m N, S N [Begin courtesy of Mie Montemerlo]
95 FastSLAM Algorithm O(MN) Sample a new robot pose for each particle = g( -1, u ) + v add this to trajectory giving 1: Update the landmar EKFs in each particle We have a ``nown (estimate) trajectory; run EKFs for each landmar Calculate an importance weight (difference between actual observation, y, and epected observation, with covariance Z) 1 1 T 1 w ep y yˆ n Yn y yˆ,, n, 2Y n, 2 Resample particle set




![304 717 718 719 ] Range2=[2.](/docs-images/75/72112733/images/96-4.jpg "0254, 2.0294, 2.0347,, 2.")
96 SLAM Data Association Angle increment = Inde1= [ ] Range1=[6.0000, , ,, , , ,, , , ] Inde2= [ ] Range2=[2.0254, , ,, , , ,, , , ]
97 SLAM Data Association In practice we use a variable n to associate each measurement to a landmar number (id#) For eample n 3 = 8 means that measurement at time =3, y 3, is associated with the landmar #8 How do we get this n? nˆ arg ma (,, ˆ, ˆ P y n y 1 n 1, u 1) n This is a Maimum Lielihood estimator.
98 FastSLAM Data Association In FastSLAM, each landmar is estimated with an EKF and the lielihood can be estimated from the EKF innovation Particle #1 Particle #2 Particle #3 Particle M Robot Pose, y, q, y, q, y, q, y, q Kalman Filters m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N P( y y 1 1 1, nˆ 1, ˆ, u 1) ep ˆ n, n, 2Y 2 n, T 1 y yˆ Y y y n, If the lielihood falls below a threshold, a new landmar is added y ŷ

99 Tree of Landmars Particle #1 Particle #2 Particle #3 Particle M Robot Pose Particle, y, q #1 Particle, y, q #2 Particle, y, q #3 Particle M, y, q Robot Pose, y, q, y, q, y, q, y, q Kalman Filters m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N Kalman Filters m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N Robot Pose Particle, y, q #1 Particle, y, q #2 Particle, y, q #3 Particle M, y, q Kalman Filters m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N m 1, S 1 m 2, S 2 m N, S N FastSLAM compleity is log(mn) M number of particles N number of landmars When we resample (with replacement) the same particle may be duplicated several times Copying is linear in the size of the map Most of the landmars remain unchanged during a map update (only the visible landmars are updated) From Montemerlo 2003
100 Tree of Landmars Balanced binary tree with 8 landmars Use a tree of landmars that is shared between particles If the tree is balanced then accessing a landmar taes log(n) and FastSLAM runs in log(m logn) [Courtesy of Mie Montemerlo]
101 Tree of Landmars Modifying a landmar #3. Only m 3 and S 3 are modified Avoid duplicating the entire tree Create a new path from the root to landmar #3 Copy the missing pointers to the rest of the old tree Keep the old pointers so the other particles can use the old values [Courtesy of Mie Montemerlo]


102 FastSLAM: Victoria Par Results 4 m traverse 100 particles GPS ground truth Uses negative evidence to remove spurious landmars Uneven terrain [Courtesy of Mie Montemerlo]

103 FastSLAM: Victoria Par Results 100 meters away from it s true position 100 particles RMS error over 4m is ~4m [End courtesy of Mie Montemerlo]
 3 particles")


104 Grid-Based FastSLAM (occupancy grid) 3 particles map of particle 1 map of particle 3 Each particle must carry its entire map map of particle 2 [Courtesy of Mie Montemerlo]

105 FastSLAM Eample 500 particles 28m28m Length of trajectory 491m Map resolution 10cm
![Closing the Loop BEFORE AFTER [Newman 2005] Start at you are here (no uncertainty) When the loop is Close you are bac here Recognize a previously landmar Typically SLAM will drift, after a long drive](/docs-images/75/72112733/images/106-1.jpg "the position and landmars will be off Once an previously located object is seen Mae the correction Propagate the correction bac Uncertainties collapse With great powers comes great responsibility")
106 Closing the Loop BEFORE AFTER [Newman 2005] Start at you are here (no uncertainty) When the loop is Close you are bac here Recognize a previously landmar Typically SLAM will drift, after a long drive the position and landmars will be off Once an previously located object is seen Mae the correction Propagate the correction bac Uncertainties collapse With great powers comes great responsibility Uncertainty is not a bad thing
 will give you depth as")

107 Use camera images to detect landmars Single camera (mono) is similar to bearing only SLAM Two cameras (stereo) will give you depth as well Detect landmars (aa features ) in the image(s) Build an appearance vector around the landmar to describe its appearance Visual Landmars


108 Visual Landmars Etract landmars and their descriptors from two images. Then match the descriptors Landmars have a scale and orientation

109 Visual SLAM Bird s eye view of the 3D SIFT map SIFT landmars from stereo camera Disparities are indicated by lines Se, Lowe and Little 2005



110 RGBD SLAM (Red Green Blue Depth) Use camera and depth Provide a dense point cloud
111 Build dense, 3D, colored maps Lots of data so maps are usually small (small rooms or scanning objects) Use 3D data for localization Associate visual landmars to 3D coordinates RGBD SLAM
112 Mapping Algorithms - Comparison SLAM (Kalman) EM ML* FastSLAM Output Posterior ML/MAP ML/MAP Posterior Convergence Strong Wea? No Stong Local minima No Yes Yes No Real time Yes No Yes Yes Odom. Error Unbounded Unbounded Unbounded Unbounded Sensor Noise Gaussian Any Any Any # Features 10 3 >10 3 Feature uniq Yes No ~No Yes Raw data No Yes Yes No
113 Localization and Mapping Summary There are several methods for localization and mapping; two dominant are Kalman filter fast and efficient; very well understood local convergence strong assumptions Hypothesis-based methods (particle filters/monte Carlo methods) not as fast or efficient; not as well understood global convergence very wea assumptions The best methods today are hybrids use hypotheses as necessary use KF-lie techniques whenever possible The largest revolution in mapping and localization has been data: It s all in the lielihood function laser scanners have really revolutionized the trade vision is net?
Bayesian Methods / G.D. Hager S. Leonard
 Bayesian Methods Recall Robot Localization Given Sensor readings z 1, z 2,, z t = z 1:t Known control inputs u 0, u 1, u t = u 0:t Known model t+1 t, u t ) with initial 1 u 0 ) Known map z t t ) Compute
Bayesian Methods Recall Robot Localization Given Sensor readings z 1, z 2,, z t = z 1:t Known control inputs u 0, u 1, u t = u 0:t Known model t+1 t, u t ) with initial 1 u 0 ) Known map z t t ) Compute
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization
 Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Introduction to Mobile Robotics Bayes Filter Particle Filter and Monte Carlo Localization Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Kai Arras 1 Motivation Recall: Discrete filter Discretize the
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Robotics. Mobile Robotics. Marc Toussaint U Stuttgart
 Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
Robotics Mobile Robotics State estimation, Bayes filter, odometry, particle filter, Kalman filter, SLAM, joint Bayes filter, EKF SLAM, particle SLAM, graph-based SLAM Marc Toussaint U Stuttgart DARPA Grand
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics
 Subramanian Ramamoorthy School of Informatics") Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Particle Filters; Simultaneous Localization and Mapping (Intelligent Autonomous Robotics) Subramanian Ramamoorthy School of Informatics Recap: State Estimation using Kalman Filter Project state and error
Recursive Bayes Filtering
 Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Recursive Bayes Filtering CS485 Autonomous Robotics Amarda Shehu Fall 2013 Notes modified from Wolfram Burgard, University of Freiburg Physical Agents are Inherently Uncertain Uncertainty arises from four
Mobile Robot Localization
 Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Mobile Robot Localization 1 The Problem of Robot Localization Given a map of the environment, how can a robot determine its pose (planar coordinates + orientation)? Two sources of uncertainty: - observations
Why do we care? Measurements. Handling uncertainty over time: predicting, estimating, recognizing, learning. Dealing with time
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
L09. PARTICLE FILTERING. NA568 Mobile Robotics: Methods & Algorithms
 L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Why do we care? Examples. Bayes Rule. What room am I in? Handling uncertainty over time: predicting, estimating, recognizing, learning
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
The Unscented Particle Filter
 The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
TSRT14: Sensor Fusion Lecture 9
 TSRT14: Sensor Fusion Lecture 9 Simultaneous localization and mapping (SLAM) Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 9 Gustaf Hendeby Spring 2018 1 / 28 Le 9: simultaneous localization and
TSRT14: Sensor Fusion Lecture 9 Simultaneous localization and mapping (SLAM) Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 9 Gustaf Hendeby Spring 2018 1 / 28 Le 9: simultaneous localization and
Particle Filters. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Particle Filters Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Motivation For continuous spaces: often no analytical formulas for Bayes filter updates
Bayesian Approach 2. CSC412 Probabilistic Learning & Reasoning
 CSC412 Probabilistic Learning & Reasoning Lecture 12: Bayesian Parameter Estimation February 27, 2006 Sam Roweis Bayesian Approach 2 The Bayesian programme (after Rev. Thomas Bayes) treats all unnown quantities
CSC412 Probabilistic Learning & Reasoning Lecture 12: Bayesian Parameter Estimation February 27, 2006 Sam Roweis Bayesian Approach 2 The Bayesian programme (after Rev. Thomas Bayes) treats all unnown quantities
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
Introduction to Mobile Robotics Information Gain-Based Exploration. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras
 Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
Introduction to Mobile Robotics Information Gain-Based Exploration Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Giorgio Grisetti, Kai Arras 1 Tasks of Mobile Robots mapping SLAM localization integrated
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Particle Filter for Localization Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, and the book Probabilistic Robotics from Thurn et al.
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robotic mapping Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz What is SLAM? Estimate the pose of a robot and the map of the environment
Probabilistic Graphical Models
 Probabilistic Graphical Models Lecture Notes Fall 2009 November, 2009 Byoung-Ta Zhang School of Computer Science and Engineering & Cognitive Science, Brain Science, and Bioinformatics Seoul National University
Probabilistic Graphical Models Lecture Notes Fall 2009 November, 2009 Byoung-Ta Zhang School of Computer Science and Engineering & Cognitive Science, Brain Science, and Bioinformatics Seoul National University
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
Computer Vision Group Prof. Daniel Cremers. 11. Sampling Methods
 Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 11. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics
 Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Probabilistic Fundamentals in Robotics Probabilistic Models of Mobile Robots Robot localization Basilio Bona DAUIN Politecnico di Torino June 2011 Course Outline Basic mathematical framework Probabilistic
Computer Vision Group Prof. Daniel Cremers. 14. Sampling Methods
 Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
Prof. Daniel Cremers 14. Sampling Methods Sampling Methods Sampling Methods are widely used in Computer Science as an approximation of a deterministic algorithm to represent uncertainty without a parametric
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions
 CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
CIS 390 Fall 2016 Robotics: Planning and Perception Final Review Questions December 14, 2016 Questions Throughout the following questions we will assume that x t is the state vector at time t, z t is the
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Probabilistic Graphical Models
 Probabilistic Graphical Models Lecture 12 Dynamical Models CS/CNS/EE 155 Andreas Krause Homework 3 out tonight Start early!! Announcements Project milestones due today Please email to TAs 2 Parameter learning
Probabilistic Graphical Models Lecture 12 Dynamical Models CS/CNS/EE 155 Andreas Krause Homework 3 out tonight Start early!! Announcements Project milestones due today Please email to TAs 2 Parameter learning
Results: MCMC Dancers, q=10, n=500
 Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
Robotics. Lecture 4: Probabilistic Robotics. See course website for up to date information.
 Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Robotics Lecture 4: Probabilistic Robotics See course website http://www.doc.ic.ac.uk/~ajd/robotics/ for up to date information. Andrew Davison Department of Computing Imperial College London Review: Sensors
Sensor Fusion: Particle Filter
 Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
10-701/15-781, Machine Learning: Homework 4
 10-701/15-781, Machine Learning: Homewor 4 Aarti Singh Carnegie Mellon University ˆ The assignment is due at 10:30 am beginning of class on Mon, Nov 15, 2010. ˆ Separate you answers into five parts, one
10-701/15-781, Machine Learning: Homewor 4 Aarti Singh Carnegie Mellon University ˆ The assignment is due at 10:30 am beginning of class on Mon, Nov 15, 2010. ˆ Separate you answers into five parts, one
Gaussian Mixture Model
 Case Study : Document Retrieval MAP EM, Latent Dirichlet Allocation, Gibbs Sampling Machine Learning/Statistics for Big Data CSE599C/STAT59, University of Washington Emily Fox 0 Emily Fox February 5 th,
Case Study : Document Retrieval MAP EM, Latent Dirichlet Allocation, Gibbs Sampling Machine Learning/Statistics for Big Data CSE599C/STAT59, University of Washington Emily Fox 0 Emily Fox February 5 th,
State Space and Hidden Markov Models
 State Space and Hidden Markov Models Kunsch H.R. State Space and Hidden Markov Models. ETH- Zurich Zurich; Aliaksandr Hubin Oslo 2014 Contents 1. Introduction 2. Markov Chains 3. Hidden Markov and State
State Space and Hidden Markov Models Kunsch H.R. State Space and Hidden Markov Models. ETH- Zurich Zurich; Aliaksandr Hubin Oslo 2014 Contents 1. Introduction 2. Markov Chains 3. Hidden Markov and State
Simultaneous Localization and Mapping
 Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Simultaneous Localization and Mapping Miroslav Kulich Intelligent and Mobile Robotics Group Czech Institute of Informatics, Robotics and Cybernetics Czech Technical University in Prague Winter semester
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
A Comparison of Particle Filters for Personal Positioning
 VI Hotine-Marussi Symposium of Theoretical and Computational Geodesy May 9-June 6. A Comparison of Particle Filters for Personal Positioning D. Petrovich and R. Piché Institute of Mathematics Tampere University
VI Hotine-Marussi Symposium of Theoretical and Computational Geodesy May 9-June 6. A Comparison of Particle Filters for Personal Positioning D. Petrovich and R. Piché Institute of Mathematics Tampere University
Using the Kalman Filter for SLAM AIMS 2015
 Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
Using the Kalman Filter for SLAM AIMS 2015 Contents Trivial Kinematics Rapid sweep over localisation and mapping (components of SLAM) Basic EKF Feature Based SLAM Feature types and representations Implementation
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
Introduction to Mobile Robotics Probabilistic Sensor Models
 Introduction to Mobile Robotics Probabilistic Sensor Models Wolfram Burgard 1 Sensors for Mobile Robots Contact sensors: Bumpers Proprioceptive sensors Accelerometers (spring-mounted masses) Gyroscopes
Introduction to Mobile Robotics Probabilistic Sensor Models Wolfram Burgard 1 Sensors for Mobile Robots Contact sensors: Bumpers Proprioceptive sensors Accelerometers (spring-mounted masses) Gyroscopes
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
Manipulators. Robotics. Outline. Non-holonomic robots. Sensors. Mobile Robots
 Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Manipulators P obotics Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity
Estimating the Shape of Targets with a PHD Filter
 Estimating the Shape of Targets with a PHD Filter Christian Lundquist, Karl Granström, Umut Orguner Department of Electrical Engineering Linöping University 583 33 Linöping, Sweden Email: {lundquist, arl,
Estimating the Shape of Targets with a PHD Filter Christian Lundquist, Karl Granström, Umut Orguner Department of Electrical Engineering Linöping University 583 33 Linöping, Sweden Email: {lundquist, arl,
Comparision of Probabilistic Navigation methods for a Swimming Robot
 Comparision of Probabilistic Navigation methods for a Swimming Robot Anwar Ahmad Quraishi Semester Project, Autumn 2013 Supervisor: Yannic Morel BioRobotics Laboratory Headed by Prof. Aue Jan Ijspeert
Comparision of Probabilistic Navigation methods for a Swimming Robot Anwar Ahmad Quraishi Semester Project, Autumn 2013 Supervisor: Yannic Morel BioRobotics Laboratory Headed by Prof. Aue Jan Ijspeert
F denotes cumulative density. denotes probability density function; (.)
") BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
Tracking. Readings: Chapter 17 of Forsyth and Ponce. Matlab Tutorials: motiontutorial.m, trackingtutorial.m
 Goal: Tracking Fundamentals of model-based tracking with emphasis on probabilistic formulations. Eamples include the Kalman filter for linear-gaussian problems, and maimum likelihood and particle filters
Goal: Tracking Fundamentals of model-based tracking with emphasis on probabilistic formulations. Eamples include the Kalman filter for linear-gaussian problems, and maimum likelihood and particle filters
Lecture 3: Pattern Classification. Pattern classification
 EE E68: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mitures and
EE E68: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mitures and
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Lecture 4: Probabilistic Learning. Estimation Theory. Classification with Probability Distributions
 DD2431 Autumn, 2014 1 2 3 Classification with Probability Distributions Estimation Theory Classification in the last lecture we assumed we new: P(y) Prior P(x y) Lielihood x2 x features y {ω 1,..., ω K
DD2431 Autumn, 2014 1 2 3 Classification with Probability Distributions Estimation Theory Classification in the last lecture we assumed we new: P(y) Prior P(x y) Lielihood x2 x features y {ω 1,..., ω K
Robots Autónomos. Depto. CCIA. 2. Bayesian Estimation and sensor models. Domingo Gallardo
 Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Robots Autónomos 2. Bayesian Estimation and sensor models Domingo Gallardo Depto. CCIA http://www.rvg.ua.es/master/robots References Recursive State Estimation: Thrun, chapter 2 Sensor models and robot
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Dynamic models 1 Kalman filters, linearization,
 Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Koller & Friedman: Chapter 16 Jordan: Chapters 13, 15 Uri Lerner s Thesis: Chapters 3,9 Dynamic models 1 Kalman filters, linearization, Switching KFs, Assumed density filters Probabilistic Graphical Models
Outline. Spring It Introduction Representation. Markov Random Field. Conclusion. Conditional Independence Inference: Variable elimination
 Probabilistic Graphical Models COMP 790-90 Seminar Spring 2011 The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Outline It Introduction ti Representation Bayesian network Conditional Independence Inference:
Probabilistic Graphical Models COMP 790-90 Seminar Spring 2011 The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Outline It Introduction ti Representation Bayesian network Conditional Independence Inference:
Rao-Blackwellized Particle Filter for Multiple Target Tracking
 Rao-Blackwellized Particle Filter for Multiple Target Tracking Simo Särkkä, Aki Vehtari, Jouko Lampinen Helsinki University of Technology, Finland Abstract In this article we propose a new Rao-Blackwellized
Rao-Blackwellized Particle Filter for Multiple Target Tracking Simo Särkkä, Aki Vehtari, Jouko Lampinen Helsinki University of Technology, Finland Abstract In this article we propose a new Rao-Blackwellized
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
v are uncorrelated, zero-mean, white
 6.0 EXENDED KALMAN FILER 6.1 Introduction One of the underlying assumptions of the Kalman filter is that it is designed to estimate the states of a linear system based on measurements that are a linear
6.0 EXENDED KALMAN FILER 6.1 Introduction One of the underlying assumptions of the Kalman filter is that it is designed to estimate the states of a linear system based on measurements that are a linear
Markov localization uses an explicit, discrete representation for the probability of all position in the state space.
 Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
Markov Kalman Filter Localization Markov localization localization starting from any unknown position recovers from ambiguous situation. However, to update the probability of all positions within the whole
CS Lecture 18. Expectation Maximization
 CS 6347 Lecture 18 Expectation Maximization Unobserved Variables Latent or hidden variables in the model are never observed We may or may not be interested in their values, but their existence is crucial
CS 6347 Lecture 18 Expectation Maximization Unobserved Variables Latent or hidden variables in the model are never observed We may or may not be interested in their values, but their existence is crucial
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
Robert Collins CSE586, PSU Intro to Sampling Methods
 Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Lecture 3: Latent Variables Models and Learning with the EM Algorithm. Sam Roweis. Tuesday July25, 2006 Machine Learning Summer School, Taiwan
 Lecture 3: Latent Variables Models and Learning with the EM Algorithm Sam Roweis Tuesday July25, 2006 Machine Learning Summer School, Taiwan Latent Variable Models What to do when a variable z is always
Lecture 3: Latent Variables Models and Learning with the EM Algorithm Sam Roweis Tuesday July25, 2006 Machine Learning Summer School, Taiwan Latent Variable Models What to do when a variable z is always
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Nonlinear State Estimation! Particle, Sigma-Points Filters!
 Nonlinear State Estimation! Particle, Sigma-Points Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Particle filter!! Sigma-Points Unscented Kalman ) filter!!
Nonlinear State Estimation! Particle, Sigma-Points Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Particle filter!! Sigma-Points Unscented Kalman ) filter!!
Lecture 8: Bayesian Estimation of Parameters in State Space Models
 in State Space Models March 30, 2016 Contents 1 Bayesian estimation of parameters in state space models 2 Computational methods for parameter estimation 3 Practical parameter estimation in state space
in State Space Models March 30, 2016 Contents 1 Bayesian estimation of parameters in state space models 2 Computational methods for parameter estimation 3 Practical parameter estimation in state space
AUTOMOTIVE ENVIRONMENT SENSORS
 AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
AUTOMOTIVE ENVIRONMENT SENSORS Lecture 5. Localization BME KÖZLEKEDÉSMÉRNÖKI ÉS JÁRMŰMÉRNÖKI KAR 32708-2/2017/INTFIN SZÁMÚ EMMI ÁLTAL TÁMOGATOTT TANANYAG Related concepts Concepts related to vehicles moving
THE goal of simultaneous localization and mapping
 IEEE TRANSACTIONS ON ROBOTICS, MANUSCRIPT SEPTEMBER 7, 2008 1 isam: Incremental Smoothing and Mapping Michael Kaess, Student Member, IEEE, Ananth Ranganathan, Student Member, IEEE, and Fran Dellaert, Member,
IEEE TRANSACTIONS ON ROBOTICS, MANUSCRIPT SEPTEMBER 7, 2008 1 isam: Incremental Smoothing and Mapping Michael Kaess, Student Member, IEEE, Ananth Ranganathan, Student Member, IEEE, and Fran Dellaert, Member,
Machine Learning Lecture 3
 Announcements Machine Learning Lecture 3 Eam dates We re in the process of fiing the first eam date Probability Density Estimation II 9.0.207 Eercises The first eercise sheet is available on L2P now First
Announcements Machine Learning Lecture 3 Eam dates We re in the process of fiing the first eam date Probability Density Estimation II 9.0.207 Eercises The first eercise sheet is available on L2P now First
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters
 SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
SLAM for Ship Hull Inspection using Exactly Sparse Extended Information Filters Matthew Walter 1,2, Franz Hover 1, & John Leonard 1,2 Massachusetts Institute of Technology 1 Department of Mechanical Engineering
Kalman Filter Computer Vision (Kris Kitani) Carnegie Mellon University
 Carnegie Mellon University") Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Kalman Filter 16-385 Computer Vision (Kris Kitani) Carnegie Mellon University Examples up to now have been discrete (binary) random variables Kalman filtering can be seen as a special case of a temporal
Robert Collins CSE586, PSU Intro to Sampling Methods
 Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Topics to be Covered Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling (CDF) Ancestral Sampling Rejection
Estimating Gaussian Mixture Densities with EM A Tutorial
 Estimating Gaussian Mixture Densities with EM A Tutorial Carlo Tomasi Due University Expectation Maximization (EM) [4, 3, 6] is a numerical algorithm for the maximization of functions of several variables
Estimating Gaussian Mixture Densities with EM A Tutorial Carlo Tomasi Due University Expectation Maximization (EM) [4, 3, 6] is a numerical algorithm for the maximization of functions of several variables
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Efficient Monitoring for Planetary Rovers
 International Symposium on Artificial Intelligence and Robotics in Space (isairas), May, 2003 Efficient Monitoring for Planetary Rovers Vandi Verma vandi@ri.cmu.edu Geoff Gordon ggordon@cs.cmu.edu Carnegie
International Symposium on Artificial Intelligence and Robotics in Space (isairas), May, 2003 Efficient Monitoring for Planetary Rovers Vandi Verma vandi@ri.cmu.edu Geoff Gordon ggordon@cs.cmu.edu Carnegie
Sequential Monte Carlo and Particle Filtering. Frank Wood Gatsby, November 2007
 Sequential Monte Carlo and Particle Filtering Frank Wood Gatsby, November 2007 Importance Sampling Recall: Let s say that we want to compute some expectation (integral) E p [f] = p(x)f(x)dx and we remember
Sequential Monte Carlo and Particle Filtering Frank Wood Gatsby, November 2007 Importance Sampling Recall: Let s say that we want to compute some expectation (integral) E p [f] = p(x)f(x)dx and we remember
Content.
 Content Fundamentals of Bayesian Techniques (E. Sucar) Bayesian Filters (O. Aycard) Definition & interests Implementations Hidden Markov models Discrete Bayesian Filters or Markov localization Kalman filters
Content Fundamentals of Bayesian Techniques (E. Sucar) Bayesian Filters (O. Aycard) Definition & interests Implementations Hidden Markov models Discrete Bayesian Filters or Markov localization Kalman filters
Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations
 Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations Department of Biomedical Engineering and Computational Science Aalto University April 28, 2010 Contents 1 Multiple Model
Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations Department of Biomedical Engineering and Computational Science Aalto University April 28, 2010 Contents 1 Multiple Model
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Artificial Neural Networks 2
 CSC2515 Machine Learning Sam Roweis Artificial Neural s 2 We saw neural nets for classification. Same idea for regression. ANNs are just adaptive basis regression machines of the form: y k = j w kj σ(b
CSC2515 Machine Learning Sam Roweis Artificial Neural s 2 We saw neural nets for classification. Same idea for regression. ANNs are just adaptive basis regression machines of the form: y k = j w kj σ(b
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
CSC2515 Assignment #2
 CSC2515 Assignment #2 Due: Nov.4, 2pm at the START of class Worth: 18% Late assignments not accepted. 1 Pseudo-Bayesian Linear Regression (3%) In this question you will dabble in Bayesian statistics and
CSC2515 Assignment #2 Due: Nov.4, 2pm at the START of class Worth: 18% Late assignments not accepted. 1 Pseudo-Bayesian Linear Regression (3%) In this question you will dabble in Bayesian statistics and
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
Approximate Message Passing with Built-in Parameter Estimation for Sparse Signal Recovery
 Approimate Message Passing with Built-in Parameter Estimation for Sparse Signal Recovery arxiv:1606.00901v1 [cs.it] Jun 016 Shuai Huang, Trac D. Tran Department of Electrical and Computer Engineering Johns
Approimate Message Passing with Built-in Parameter Estimation for Sparse Signal Recovery arxiv:1606.00901v1 [cs.it] Jun 016 Shuai Huang, Trac D. Tran Department of Electrical and Computer Engineering Johns
Sensors Fusion for Mobile Robotics localization. M. De Cecco - Robotics Perception and Action
 Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
LECTURE # - NEURAL COMPUTATION, Feb 04, Linear Regression. x 1 θ 1 output... θ M x M. Assumes a functional form
 LECTURE # - EURAL COPUTATIO, Feb 4, 4 Linear Regression Assumes a functional form f (, θ) = θ θ θ K θ (Eq) where = (,, ) are the attributes and θ = (θ, θ, θ ) are the function parameters Eample: f (, θ)
LECTURE # - EURAL COPUTATIO, Feb 4, 4 Linear Regression Assumes a functional form f (, θ) = θ θ θ K θ (Eq) where = (,, ) are the attributes and θ = (θ, θ, θ ) are the function parameters Eample: f (, θ)
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering
 ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
But if z is conditioned on, we need to model it:
 Partially Unobserved Variables Lecture 8: Unsupervised Learning & EM Algorithm Sam Roweis October 28, 2003 Certain variables q in our models may be unobserved, either at training time or at test time or
Partially Unobserved Variables Lecture 8: Unsupervised Learning & EM Algorithm Sam Roweis October 28, 2003 Certain variables q in our models may be unobserved, either at training time or at test time or
CSC487/2503: Foundations of Computer Vision. Visual Tracking. David Fleet
 CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
CSC487/2503: Foundations of Computer Vision Visual Tracking David Fleet Introduction What is tracking? Major players: Dynamics (model of temporal variation of target parameters) Measurements (relation
Bayesian Quadrature: Model-based Approximate Integration. David Duvenaud University of Cambridge
 Bayesian Quadrature: Model-based Approimate Integration David Duvenaud University of Cambridge The Quadrature Problem ˆ We want to estimate an integral Z = f ()p()d ˆ Most computational problems in inference
Bayesian Quadrature: Model-based Approimate Integration David Duvenaud University of Cambridge The Quadrature Problem ˆ We want to estimate an integral Z = f ()p()d ˆ Most computational problems in inference