LARGE-SCALE TRAFFIC STATE ESTIMATION
|
|
|
- Aleesha Howard
- 5 years ago
- Views:
Transcription

1 Hans van Lint, Yufei Yuan & Friso Scholten A localized deterministic Ensemble Kalman Filter LARGE-SCALE TRAFFIC STATE ESTIMATION
2 CONTENTS Intro: need for large-scale traffic state estimation Some Kalman Filter basics The Ensemble Kalman Filter getting rid of matrix inversions deterministic formulation localisation, Results and Discussions & outlook (big) plans
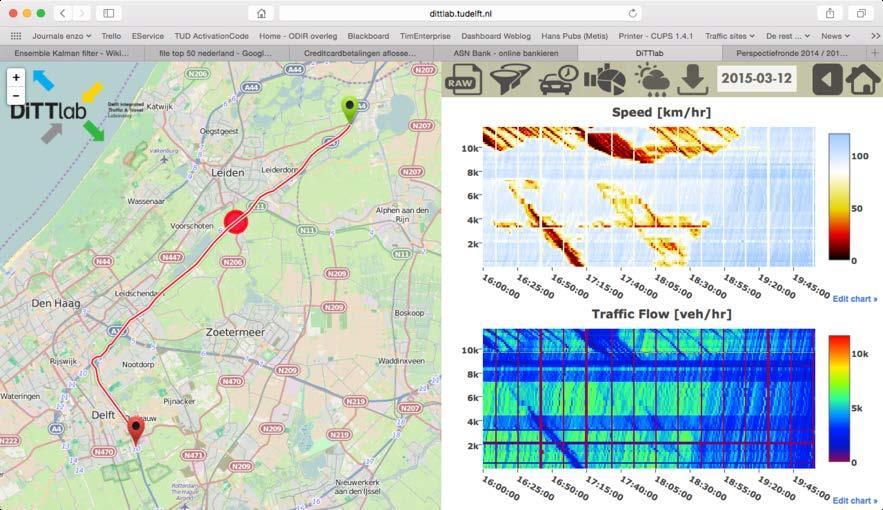
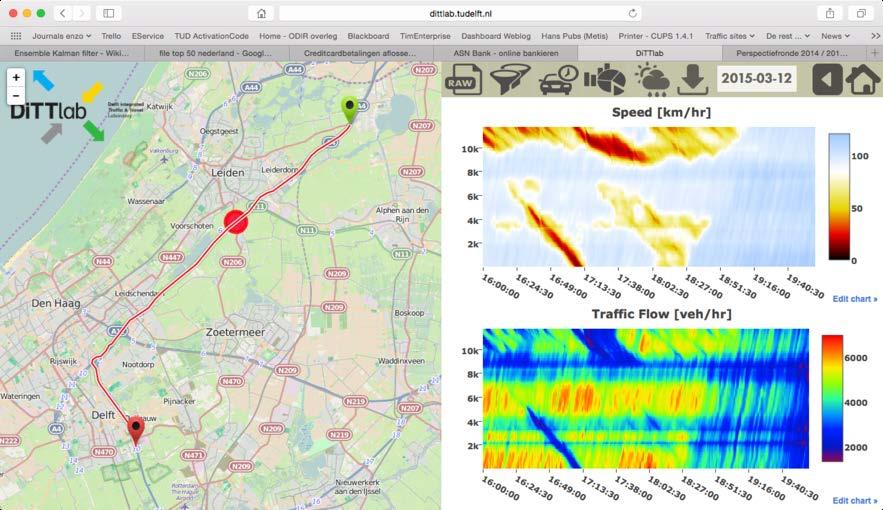
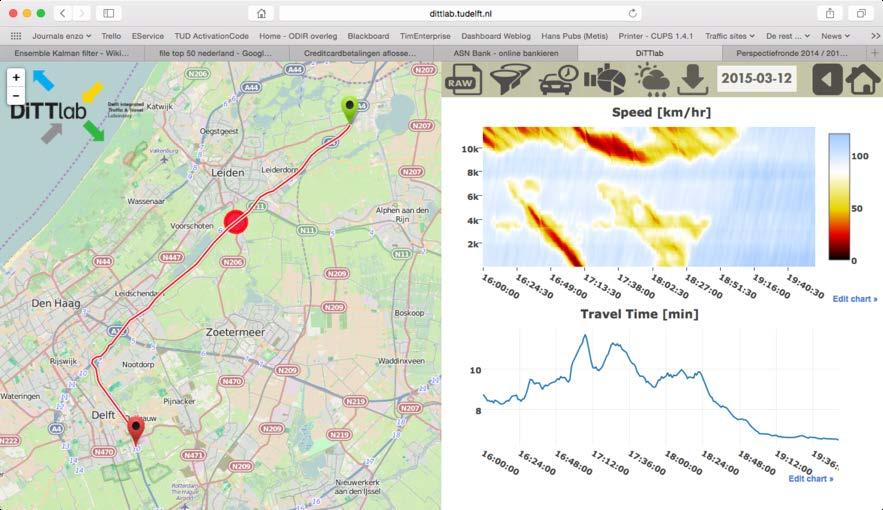
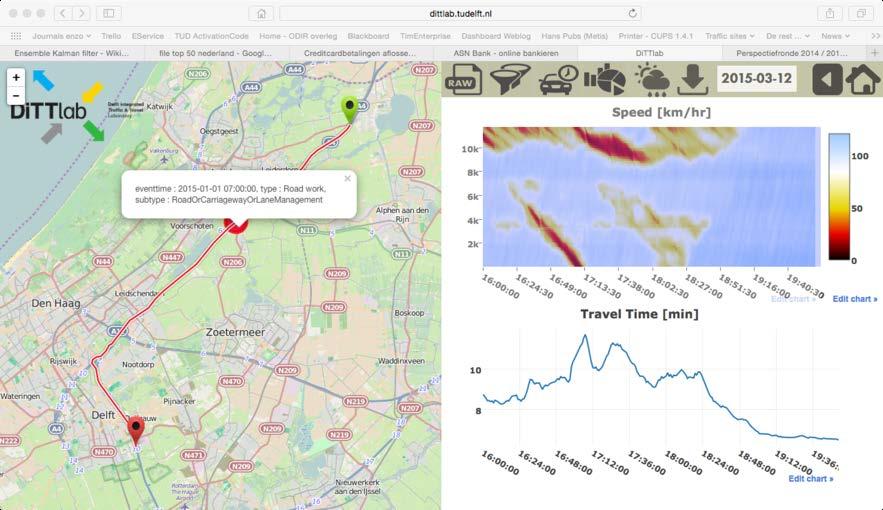
3 INTRODUCTION Dutch National Data Warehouse Traffic Information Network 2500 km freeways 3500 km prov/urban 24,000 measurement sites Real-time Data Dynamic: Flow, Speed, Occupancy, Travel time (lane / usr class specific), FCD Status: roadworks, incidents, events 150,000 measurements/min Historical database 200 TB Raw data 3
4 INTRODUCTION Dutch National Data Warehouse Traffic Information Ambition Build national traffic observatory (for RT and archived traffic info) From raw data to real information: Intelligent database (search terms related to traffic patterns and explanatory factors) Data-based routable network graphs Densities, space mean speeds Capacities, other FD params MFDs and other agg state vars Inflows, turns, OD flows Opensource tools to dive into all this 4
5 5
6 6
7 7
8 8
9 9
: p. 596-612. Van Lint, J.W.C., Empirical Evaluation of New Robust Travel Time Estimation Algorithms.")
10 Treiber, M. and D. Helbing, Reconstructing the Spatio-Temporal Traffic Dynamics from Stationary Detector Data : p van Lint, J.W.C. and S.P. Hoogendoorn, A Robust and Efficient Method for Fusing Heterogeneous Data from Traffic Sensors on Freeways. CAICE, (8): p Van Lint, J.W.C., Empirical Evaluation of New Robust Travel Time Estimation Algorithms. Transportation Research Record, 2010(2160): p
11 INTRODUCTION Dutch National Data Warehouse Traffic Information Ambition Build national traffic observatory (for RT and archived traffic info) Next step: Scalable efficient model-based traffic state estimation: densities (inflows, turns) TRADE OFF Estimation accuracy vs computational efficiency 11
12 THE KALMAN FILTER For any system cast in discrete state space form the KF is an efficient recursive solution for estimating state vector x; x k+1 = F k x k + G k u k + w k y k = H k x k + v k that is optimal in three ways Minimum error (co)variance Maximal posterior probability Conditional mean estimation given a some (fairly strict) assumptions the validity of which strongly affect the quality of the result E(w k ) = 0, E(w k w l ) = E(v k ) = 0, E(v k v l ) = Q k R k k = l 0 k l k = l 0 k l 12
13 THE KALMAN FILTER Initial conditions (reasonable choices for Q and R must also be made) ˆx 0 0 = ˆx 0,P 0 0 = P 0 Time-propagation (prediction): ˆx k k 1 = F k 1ˆx k 1 k 1 + G k 1 u k 1 T P k k 1 = F k 1 P k 1 k 1 F k 1 + Q k 1 Measurement adaptation (correction): e k = y k H k ˆx k k 1 K k = P k k 1 H k ˆx k k = ˆx k k 1 + K k e k ( H k P k k 1 H k + R ) k P k k = [ I K k H k ]P k k 1 13
14 A CLOSER LOOK AT THE FILTER GAIN sensitivity observation model to changes in the state K k = P k k 1 H k H k P k k 1 H k + R k error covariance of the innovations (i.e. uncertainty in the new information we get from observations). 14
15 A CLOSER LOOK AT THE FILTER GAIN Kalman Gain = uncertainty in (process) model uncertainty in observations Sensitivity observation model So balance between uncertainty in process model and uncertainty in measurements / observation model! 15
16 TRAFFIC FLOW SIMULATION MODELS Are naturally cast in discrete state-space form Conservation of vehicles (+ possible additional pde for speed) Observation model typically fundamental diagram x k+1 = f ( x k,u k ) + w k typically f : ρ k+1 = ρ k + ΔL y k = h k ( x k ) + v k typically h :q k = Q k e ( ) ρ k Δt ( q in k q out k + r s) Q k e 100 ( ) V k e ρ k 50 ( ) = Q e k ( ρ k ) ρ k ρ k
17 TRAFFIC STATE ESTIMATION Extended Kalman filtering Nonlinear extension KF Assumptions Process model can be approximated by 1st order Taylor expansion Obs model can be approximated with 1st order Taylor expansion All other KF assumptions (iid Gaussian WN, etc) x k+1 = f k y k = h k F k = df k dx ( x ) k + w k ( x ) k + v k ( x) H k = dh k dx ( x) x= ˆx k x= ˆx k 17
18 EXTENDED KALMAN FILTER Many challenges linearisation may cause adaptation in the wrong direction Computing derivatives = pain in Scalability: matrix manipulations & inversions expensive (E)KF assumptions on violated all the time ˆx 0 0 = ˆx 0,P 0 0 = P 0 ˆx k k 1 = f ( ˆx k 1 k 1,u ) k T P k k 1 = F k 1 P k 1 k 1 F k 1 e k = y k h( ˆx ) k k 1 K k = P k k 1 H k ˆx k k = ˆx k k 1 + K k e k + Q k 1 ( H k P k k 1 H k + R ) k P k k = [ I K k H k ]P k k 1 18
19 ALTERNATIVE: ENSEMBLE KALMAN FILTER Use ensemble of N state vectors and noisy observation replications Predicting ensemble mean and variance is simple Update step similar to EKF Still requires linearisation? X 0 0 = [x 0 1,...,x 0 N ], X k k 1 = f ( X k 1 k 1,U k ) x k k 1 = E(X k k 1 ) = 1 N T P k k 1 = A k k 1 A k k 1 i=1:n D k = [d k 1,...,d k N ],with d k i E k = D k h X k k 1 K k = P k k 1 X k k = X k k 1 + K k E k i x k k 1 (N 1), with A x = X x E(X x ) = y k + e k i ( ) ( ) H k P k k 1 H k + R k 19
T + R k and [HA Still i i ] = h(x requires linearisation k k 1 ) 1 j h(x N? k k 1 ) j=1:n X 0 0 = [x 0 1,.")
20 ALTERNATIVE: ENSEMBLE KALMAN FILTER Use ensemble of N state vectors and noisy observation replications Predicting ensemble mean and variance is simple ( ) T / P k k K k = 1 Update A N 1 k k 1 HA *, step similar to * with P k k EKF = 1 HA ( HA N 1 )T + R k and [HA Still i i ] = h(x requires linearisation k k 1 ) 1 j h(x N? k k 1 ) j=1:n X 0 0 = [x 0 1,...,x 0 N ] X k k 1 = f ( X k 1 k 1,U k ) x k k 1 = E(X k k 1 ) = 1 N T P k k 1 = A k k 1 A k k 1 i=1:n D k = [d k 1,...,d k N ],with d k i E k = D k h X k k 1 K k = P k k 1 X k k = X k k 1 + K k E k i x k k 1 (N 1), with A x = X x E(X x ) = y k + e k i ( ) ( ) H k P k k 1 H k + R k 20
21 A CLOSER LOOK AT THIS FILTER GAIN distance prior state to mean ensemble state distance predicted observations to mean ensemble prediction K = A ( k k 1 HA ) T k HA( HA) T + R k total error variance (uncertainty) measurement equation 21
22 A CLOSER LOOK AT THIS FILTER GAIN Kalman Gain = uncertainty in model predictions (sign?) uncertainty in observations So again balance between uncertainty in model and uncertainty in measurements! 22
23 EKF VS ENKF Improves upon the wrong sign adaptation problem density change in positive direction of derivative right direction Observation Prior mean state Prior/posterior Ensemble Posterior mean state 23
24 EKF VS ENKF Improves upon the wrong sign adaptation problem density change in positive direction of derivative right direction right direction Observation Prior mean state Prior/posterior Ensemble Posterior mean state 24
25 EKF VS ENKF Improves upon the wrong sign adaptation problem density change in negative direction of derivative right direction Observation Prior mean state Prior/posterior Ensemble Posterior mean state 25
26 EKF VS ENKF Improves upon the wrong sign adaptation problem density change in negative direction of derivative Given proper spread, the sign is (most of the time) correct right direction right direction Observation Prior mean state Prior/posterior Ensemble Posterior mean state 26
27 EKF VS ENKF Improves upon the wrong sign adaptation problem X k k = X k k 1 + K k E k In this case most ensemble members move in the correct direction: so does the ensemble mean K k :negative K k : positive E k :negative E k : positive * with P k k K k = 1 N 1 A k k 1 ( HA) T / P k k = 1 HA ( HA N 1 )T + R k and [HA i i ] = h(x k k 1 ) 1 N j=1:n *, j h(x k k 1 ) K k : positive K k :negative 27
28 ENKF FOR LARGE-SCALE ESTIMATION Three further adaptations Getting rid of expensive matrix inversion Deterministic instead of stochastic resampling of D Localisation of the filter 28
29 ENKF FOR LARGE-SCALE ESTIMATION Three further adaptations Getting rid of expensive matrix inversion Computational cost traditional : O(m 3 + m 2 N +mn 2 + nn 2 ) - cubic in nr measurements: (2 as much 8 times more cost) - quadratic in state variables and ensemble members Computational cost SMW alternative: O(N 3 +mn 2 +nn 2 ) - linear in measurements and state size - quadratic in ensemble members: 8 Sherman-Morrison-Woodbury (SMW) formula, e.g. W.Hager, SIAM Rev., 31(2), K k = 1 A ( HA N 1 k k 1 )T 1 ( HA ( HA N 1 )T + R k ) 1!## #" #### $ R 1 I 1 N 1 (HA) I + 1 (HA)T R 1 N 1 (HA) 1 (HA) T R 1 29
30 ENKF FOR LARGE-SCALE ESTIMATION Three further adaptations Getting rid of expensive matrix inversion Deterministic instead of stochastic resampling of D Correct: ensemble spans about the same (model) subspace as the forecasting errors (else: filter divergence looms ) Stochastic resampling may lead to clustering ensemble D k = [d k 1,...,d k N ],with d k i X k k = X k k 1 + K k = y k + e k i ( ) ( ) D k h X k k 1 x k k = x k k 1 + K k A k k = A k k 1 + K k A ( ) ( ) ( ) d k h x k k 1 D k AH k Deterministic approach manipulates so that innovation / residuals AH ALWAYS spread entire measurement space (with cov R) Sakov, P., & Oke, P. R. (2008). A deterministic formulation of the ensemble kalman filter: an alternative to ensemble square root filters. Tellus A, 60 (2), K k A 30
31 ENKF FOR LARGE-SCALE ESTIMATION Three further adaptations Getting rid of expensive matrix inversion Deterministic instead of stochastic resampling of D Localisation of the filter Further reduces computational costs (chops up Cov matrix => update equations in small bits) Avoids spurious correlations Increases effective ensemble size (and spread!) Note: localisation does minimise effect SMW formulation Different techniques: least efficient (state based) O(m 3 n + m 2 nn + mnn 2 ) most efficient (obs based) O(mnN 2 + nn) 31
32 LOCALISATION INCREASES EFFECTIVE ENSEMBLE SIZE nr.
33 LOCALISATION INCREASES EFFECTIVE ENSEMBLE SIZE nr.
34 LOCALISATION INCREASES EFFECTIVE ENSEMBLE SIZE nr.
35 LOCALISATION INCREASES EFFECTIVE ENSEMBLE SIZE nr.
36 LOCALISATION INCREASES EFFECTIVE ENSEMBLE SIZE nr.
37 LOCALISATION INCREASES EFFECTIVE ENSEMBLE SIZE Note: Localisation may induce jumps in the state, which may not be realistic nr.

 loop detectors")
38 SIMULATION NETWORK 264 km 4656 cells 2 seconds time step 592 (dual) loop detectors 38
39 EXPERIMENTAL SETUP 39
40 EXPERIMENTAL SETUP 40
41 EXPERIMENTAL SETUP 41
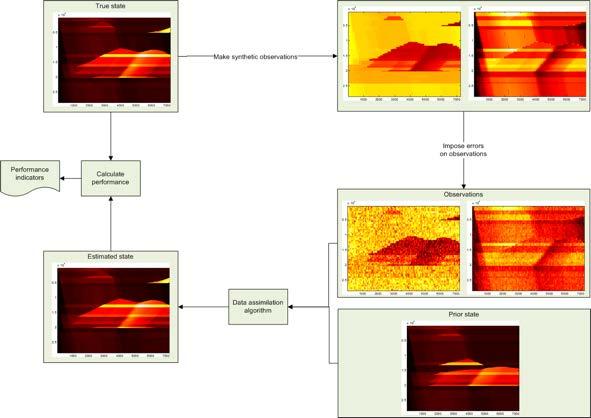
42 EXPERIMENTAL SETUP 42

43 RESULTS Ensemble size:10, 20, 30, 40, 50 respectively 43
44 RESULTS 44
45 CONCLUSIONS Localized D overall winner in this study Faster than Localised EKF on similar case More accurate and faster than all other alternatives No need (on the contrary) for SWM reformulation Localization of is absolutely crucial: Higher estimation accuracy (larger effective ensemble) Lower computational burden Deterministic sampling beneficial outperforms stochastic slightly more robust wrt smaller ensemble sizes 45
46 NEXT STEPS Dutch National Data Warehouse Traffic Information In the coming few years we are going to work on implementing and further developing these ideas on real-data Many additional puzzles: Network graph updating Parameter estimation (dual filtering?) Inflows / turns / ODs / Paths Urban / provincial (different data, different state variables) 46
Data - Model Synchronization in Extended Kalman Filters for Accurate Online Traffic State Estimation
 Data - Model Synchronization in Extended Kalman Filters for Accurate Online Traffic State Estimation Thomas Schreiter (corresponding author) TRAIL Research School Delft University of Technology, Stevinweg
Data - Model Synchronization in Extended Kalman Filters for Accurate Online Traffic State Estimation Thomas Schreiter (corresponding author) TRAIL Research School Delft University of Technology, Stevinweg
Bayes Filter Reminder. Kalman Filter Localization. Properties of Gaussians. Gaussians. Prediction. Correction. σ 2. Univariate. 1 2πσ e.
 Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
Kalman Filter Localization Bayes Filter Reminder Prediction Correction Gaussians p(x) ~ N(µ,σ 2 ) : Properties of Gaussians Univariate p(x) = 1 1 2πσ e 2 (x µ) 2 σ 2 µ Univariate -σ σ Multivariate µ Multivariate
COS Lecture 16 Autonomous Robot Navigation
 COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
COS 495 - Lecture 16 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 011 1 Figures courtesy of Siegwart & Nourbakhsh Control Structure Prior Knowledge Operator Commands Localization
Forecasting and data assimilation
 Supported by the National Science Foundation DMS Forecasting and data assimilation Outline Numerical models Kalman Filter Ensembles Douglas Nychka, Thomas Bengtsson, Chris Snyder Geophysical Statistics
Supported by the National Science Foundation DMS Forecasting and data assimilation Outline Numerical models Kalman Filter Ensembles Douglas Nychka, Thomas Bengtsson, Chris Snyder Geophysical Statistics
A Study of Covariances within Basic and Extended Kalman Filters
 A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
A Study of Covariances within Basic and Extended Kalman Filters David Wheeler Kyle Ingersoll December 2, 2013 Abstract This paper explores the role of covariance in the context of Kalman filters. The underlying
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications
 Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Probabilistic Fundamentals in Robotics Gaussian Filters Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile
Gaussian Filtering Strategies for Nonlinear Systems
 Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
Kalman Filter. Predict: Update: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q
 Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
Kalman Filter Kalman Filter Predict: x k k 1 = F k x k 1 k 1 + B k u k P k k 1 = F k P k 1 k 1 F T k + Q Update: K = P k k 1 Hk T (H k P k k 1 Hk T + R) 1 x k k = x k k 1 + K(z k H k x k k 1 ) P k k =(I
4 Derivations of the Discrete-Time Kalman Filter
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof N Shimkin 4 Derivations of the Discrete-Time
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof N Shimkin 4 Derivations of the Discrete-Time
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Date: Location: Den Haag - Nootdorp. Yufei Yuan Aurélien Duret Hans van Lint. Conference on Traffic and Granular Flow 15
 Network-wide mesoscopic traffic state estimation based on a variational formulation of the LWR model and using both Lagrangian and Eulerian observations Yufei Yuan Aurélien Duret Hans van Lint Date: 28-10-2015
Network-wide mesoscopic traffic state estimation based on a variational formulation of the LWR model and using both Lagrangian and Eulerian observations Yufei Yuan Aurélien Duret Hans van Lint Date: 28-10-2015
E190Q Lecture 11 Autonomous Robot Navigation
 E190Q Lecture 11 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 013 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
E190Q Lecture 11 Autonomous Robot Navigation Instructor: Chris Clark Semester: Spring 013 1 Figures courtesy of Siegwart & Nourbakhsh Control Structures Planning Based Control Prior Knowledge Operator
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model. David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC
 Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Adaptive ensemble Kalman filtering of nonlinear systems
 Adaptive ensemble Kalman filtering of nonlinear systems Tyrus Berry George Mason University June 12, 213 : Problem Setup We consider a system of the form: x k+1 = f (x k ) + ω k+1 ω N (, Q) y k+1 = h(x
Adaptive ensemble Kalman filtering of nonlinear systems Tyrus Berry George Mason University June 12, 213 : Problem Setup We consider a system of the form: x k+1 = f (x k ) + ω k+1 ω N (, Q) y k+1 = h(x
Organization. I MCMC discussion. I project talks. I Lecture.
 Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows
 Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows Laura Slivinski June, 3 Laura Slivinski (Brown University) Lagrangian Data Assimilation June, 3 / 3 Data Assimilation Setup:
Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows Laura Slivinski June, 3 Laura Slivinski (Brown University) Lagrangian Data Assimilation June, 3 / 3 Data Assimilation Setup:
(Extended) Kalman Filter
 Kalman Filter") (Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
(Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
Hierarchical Bayes Ensemble Kalman Filter
 Hierarchical Bayes Ensemble Kalman Filter M Tsyrulnikov and A Rakitko HydroMetCenter of Russia Wrocław, 7 Sep 2015 M Tsyrulnikov and A Rakitko (HMC) Hierarchical Bayes Ensemble Kalman Filter Wrocław, 7
Hierarchical Bayes Ensemble Kalman Filter M Tsyrulnikov and A Rakitko HydroMetCenter of Russia Wrocław, 7 Sep 2015 M Tsyrulnikov and A Rakitko (HMC) Hierarchical Bayes Ensemble Kalman Filter Wrocław, 7
Ensemble Kalman Filter
 Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
Ensemble Kalman filter assimilation of transient groundwater flow data via stochastic moment equations
 Ensemble Kalman filter assimilation of transient groundwater flow data via stochastic moment equations Alberto Guadagnini (1,), Marco Panzeri (1), Monica Riva (1,), Shlomo P. Neuman () (1) Department of
Ensemble Kalman filter assimilation of transient groundwater flow data via stochastic moment equations Alberto Guadagnini (1,), Marco Panzeri (1), Monica Riva (1,), Shlomo P. Neuman () (1) Department of
Sensor Tasking and Control
 Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Sensor Tasking and Control Sensing Networking Leonidas Guibas Stanford University Computation CS428 Sensor systems are about sensing, after all... System State Continuous and Discrete Variables The quantities
Probabilistic Fundamentals in Robotics. DAUIN Politecnico di Torino July 2010
 Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Probabilistic Fundamentals in Robotics Gaussian Filters Basilio Bona DAUIN Politecnico di Torino July 2010 Course Outline Basic mathematical framework Probabilistic models of mobile robots Mobile robot
Application of the Ensemble Kalman Filter to History Matching
 Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
A Note on the Particle Filter with Posterior Gaussian Resampling
 Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Data assimilation with and without a model
 Data assimilation with and without a model Tyrus Berry George Mason University NJIT Feb. 28, 2017 Postdoc supported by NSF This work is in collaboration with: Tim Sauer, GMU Franz Hamilton, Postdoc, NCSU
Data assimilation with and without a model Tyrus Berry George Mason University NJIT Feb. 28, 2017 Postdoc supported by NSF This work is in collaboration with: Tim Sauer, GMU Franz Hamilton, Postdoc, NCSU
A new Hierarchical Bayes approach to ensemble-variational data assimilation
 A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
Data assimilation with and without a model
 Data assimilation with and without a model Tim Sauer George Mason University Parameter estimation and UQ U. Pittsburgh Mar. 5, 2017 Partially supported by NSF Most of this work is due to: Tyrus Berry,
Data assimilation with and without a model Tim Sauer George Mason University Parameter estimation and UQ U. Pittsburgh Mar. 5, 2017 Partially supported by NSF Most of this work is due to: Tyrus Berry,
Fundamentals of Data Assimila1on
 014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
EKF and SLAM. McGill COMP 765 Sept 18 th, 2017
 EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
EKF and SLAM McGill COMP 765 Sept 18 th, 2017 Outline News and information Instructions for paper presentations Continue on Kalman filter: EKF and extension to mapping Example of a real mapping system:
Stochastic Analogues to Deterministic Optimizers
 Stochastic Analogues to Deterministic Optimizers ISMP 2018 Bordeaux, France Vivak Patel Presented by: Mihai Anitescu July 6, 2018 1 Apology I apologize for not being here to give this talk myself. I injured
Stochastic Analogues to Deterministic Optimizers ISMP 2018 Bordeaux, France Vivak Patel Presented by: Mihai Anitescu July 6, 2018 1 Apology I apologize for not being here to give this talk myself. I injured
L06. LINEAR KALMAN FILTERS. NA568 Mobile Robotics: Methods & Algorithms
 L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
L06. LINEAR KALMAN FILTERS NA568 Mobile Robotics: Methods & Algorithms 2 PS2 is out! Landmark-based Localization: EKF, UKF, PF Today s Lecture Minimum Mean Square Error (MMSE) Linear Kalman Filter Gaussian
Relative Merits of 4D-Var and Ensemble Kalman Filter
 Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo") Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
Simultaneous Localization and Mapping (SLAM) Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Introduction SLAM asks the following question: Is it possible for an autonomous vehicle
DATA ASSIMILATION FOR FLOOD FORECASTING
 DATA ASSIMILATION FOR FLOOD FORECASTING Arnold Heemin Delft University of Technology 09/16/14 1 Data assimilation is the incorporation of measurement into a numerical model to improve the model results
DATA ASSIMILATION FOR FLOOD FORECASTING Arnold Heemin Delft University of Technology 09/16/14 1 Data assimilation is the incorporation of measurement into a numerical model to improve the model results
Nonlinear Identification of Backlash in Robot Transmissions
 Nonlinear Identification of Backlash in Robot Transmissions G. Hovland, S. Hanssen, S. Moberg, T. Brogårdh, S. Gunnarsson, M. Isaksson ABB Corporate Research, Control Systems Group, Switzerland ABB Automation
Nonlinear Identification of Backlash in Robot Transmissions G. Hovland, S. Hanssen, S. Moberg, T. Brogårdh, S. Gunnarsson, M. Isaksson ABB Corporate Research, Control Systems Group, Switzerland ABB Automation
Improving the travel time prediction by using the real-time floating car data
 Improving the travel time prediction by using the real-time floating car data Krzysztof Dembczyński Przemys law Gawe l Andrzej Jaszkiewicz Wojciech Kot lowski Adam Szarecki Institute of Computing Science,
Improving the travel time prediction by using the real-time floating car data Krzysztof Dembczyński Przemys law Gawe l Andrzej Jaszkiewicz Wojciech Kot lowski Adam Szarecki Institute of Computing Science,
Estimating the vehicle accumulation: Data-fusion of loop-detector flow and floating car speed data
 Estimating the vehicle accumulation: Data-fusion of loop-detector flow and floating car speed data Paul B.C. van Erp (corresponding author) Victor L. Knoop Serge P. Hoogendoorn Department of Transport
Estimating the vehicle accumulation: Data-fusion of loop-detector flow and floating car speed data Paul B.C. van Erp (corresponding author) Victor L. Knoop Serge P. Hoogendoorn Department of Transport
The Kalman Filter ImPr Talk
 The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
New Fast Kalman filter method
 New Fast Kalman filter method Hojat Ghorbanidehno, Hee Sun Lee 1. Introduction Data assimilation methods combine dynamical models of a system with typically noisy observations to obtain estimates of the
New Fast Kalman filter method Hojat Ghorbanidehno, Hee Sun Lee 1. Introduction Data assimilation methods combine dynamical models of a system with typically noisy observations to obtain estimates of the
Methods of Data Assimilation and Comparisons for Lagrangian Data
 Methods of Data Assimilation and Comparisons for Lagrangian Data Chris Jones, Warwick and UNC-CH Kayo Ide, UCLA Andrew Stuart, Jochen Voss, Warwick Guillaume Vernieres, UNC-CH Amarjit Budiraja, UNC-CH
Methods of Data Assimilation and Comparisons for Lagrangian Data Chris Jones, Warwick and UNC-CH Kayo Ide, UCLA Andrew Stuart, Jochen Voss, Warwick Guillaume Vernieres, UNC-CH Amarjit Budiraja, UNC-CH
ENGR352 Problem Set 02
 engr352/engr352p02 September 13, 2018) ENGR352 Problem Set 02 Transfer function of an estimator 1. Using Eq. (1.1.4-27) from the text, find the correct value of r ss (the result given in the text is incorrect).
engr352/engr352p02 September 13, 2018) ENGR352 Problem Set 02 Transfer function of an estimator 1. Using Eq. (1.1.4-27) from the text, find the correct value of r ss (the result given in the text is incorrect).
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
Asynchronous data assimilation
 Ensemble Kalman Filter, lecture 2 Asynchronous data assimilation Pavel Sakov Nansen Environmental and Remote Sensing Center, Norway This talk has been prepared in the course of evita-enkf project funded
Ensemble Kalman Filter, lecture 2 Asynchronous data assimilation Pavel Sakov Nansen Environmental and Remote Sensing Center, Norway This talk has been prepared in the course of evita-enkf project funded
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
The Kalman filter. Chapter 6
 Chapter 6 The Kalman filter In the last chapter, we saw that in Data Assimilation, we ultimately desire knowledge of the full a posteriori p.d.f., that is the conditional p.d.f. of the state given the
Chapter 6 The Kalman filter In the last chapter, we saw that in Data Assimilation, we ultimately desire knowledge of the full a posteriori p.d.f., that is the conditional p.d.f. of the state given the
Variational ensemble DA at Météo-France Cliquez pour modifier le style des sous-titres du masque
 Cliquez pour modifier le style du titre Variational ensemble DA at Météo-France Cliquez pour modifier le style des sous-titres du masque L. Berre, G. Desroziers, H. Varella, L. Raynaud, C. Labadie and
Cliquez pour modifier le style du titre Variational ensemble DA at Météo-France Cliquez pour modifier le style des sous-titres du masque L. Berre, G. Desroziers, H. Varella, L. Raynaud, C. Labadie and
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
Ensemble forecasting and flow-dependent estimates of initial uncertainty. Martin Leutbecher
 Ensemble forecasting and flow-dependent estimates of initial uncertainty Martin Leutbecher acknowledgements: Roberto Buizza, Lars Isaksen Flow-dependent aspects of data assimilation, ECMWF 11 13 June 2007
Ensemble forecasting and flow-dependent estimates of initial uncertainty Martin Leutbecher acknowledgements: Roberto Buizza, Lars Isaksen Flow-dependent aspects of data assimilation, ECMWF 11 13 June 2007
EKF, UKF. Pieter Abbeel UC Berkeley EECS. Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics
 EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
EKF, UKF Pieter Abbeel UC Berkeley EECS Many slides adapted from Thrun, Burgard and Fox, Probabilistic Robotics Kalman Filter Kalman Filter = special case of a Bayes filter with dynamics model and sensory
Local Ensemble Transform Kalman Filter
 Local Ensemble Transform Kalman Filter Brian Hunt 11 June 2013 Review of Notation Forecast model: a known function M on a vector space of model states. Truth: an unknown sequence {x n } of model states
Local Ensemble Transform Kalman Filter Brian Hunt 11 June 2013 Review of Notation Forecast model: a known function M on a vector space of model states. Truth: an unknown sequence {x n } of model states
Scalable robust hypothesis tests using graphical models
 Scalable robust hypothesis tests using graphical models Umamahesh Srinivas ipal Group Meeting October 22, 2010 Binary hypothesis testing problem Random vector x = (x 1,...,x n ) R n generated from either
Scalable robust hypothesis tests using graphical models Umamahesh Srinivas ipal Group Meeting October 22, 2010 Binary hypothesis testing problem Random vector x = (x 1,...,x n ) R n generated from either
Stochastic Spectral Approaches to Bayesian Inference
 Stochastic Spectral Approaches to Bayesian Inference Prof. Nathan L. Gibson Department of Mathematics Applied Mathematics and Computation Seminar March 4, 2011 Prof. Gibson (OSU) Spectral Approaches to
Stochastic Spectral Approaches to Bayesian Inference Prof. Nathan L. Gibson Department of Mathematics Applied Mathematics and Computation Seminar March 4, 2011 Prof. Gibson (OSU) Spectral Approaches to
SIMULTANEOUS STATE AND PARAMETER ESTIMATION USING KALMAN FILTERS
 ECE5550: Applied Kalman Filtering 9 1 SIMULTANEOUS STATE AND PARAMETER ESTIMATION USING KALMAN FILTERS 9.1: Parameters versus states Until now, we have assumed that the state-space model of the system
ECE5550: Applied Kalman Filtering 9 1 SIMULTANEOUS STATE AND PARAMETER ESTIMATION USING KALMAN FILTERS 9.1: Parameters versus states Until now, we have assumed that the state-space model of the system
Distributed Data Fusion with Kalman Filters. Simon Julier Computer Science Department University College London
 Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
Distributed Data Fusion with Kalman Filters Simon Julier Computer Science Department University College London S.Julier@cs.ucl.ac.uk Structure of Talk Motivation Kalman Filters Double Counting Optimal
The Unscented Particle Filter
 The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
The Unscented Particle Filter Rudolph van der Merwe (OGI) Nando de Freitas (UC Bereley) Arnaud Doucet (Cambridge University) Eric Wan (OGI) Outline Optimal Estimation & Filtering Optimal Recursive Bayesian
Dynamic OD Matrix Estimation Exploiting Bluetooth Data in Urban Networks
 Dynamic OD Matrix Estimation Exploiting Bluetooth Data in Urban Networks J.BARCELÓ L.MONTERO M.BULLEJOS O. SERCH and C. CARMONA Department of Statistics and Operations Research and CENIT (Center for Innovation
Dynamic OD Matrix Estimation Exploiting Bluetooth Data in Urban Networks J.BARCELÓ L.MONTERO M.BULLEJOS O. SERCH and C. CARMONA Department of Statistics and Operations Research and CENIT (Center for Innovation
A Stochastic Collocation based. for Data Assimilation
 A Stochastic Collocation based Kalman Filter (SCKF) for Data Assimilation Lingzao Zeng and Dongxiao Zhang University of Southern California August 11, 2009 Los Angeles Outline Introduction SCKF Algorithm
A Stochastic Collocation based Kalman Filter (SCKF) for Data Assimilation Lingzao Zeng and Dongxiao Zhang University of Southern California August 11, 2009 Los Angeles Outline Introduction SCKF Algorithm
L11. EKF SLAM: PART I. NA568 Mobile Robotics: Methods & Algorithms
 L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
L11. EKF SLAM: PART I NA568 Mobile Robotics: Methods & Algorithms Today s Topic EKF Feature-Based SLAM State Representation Process / Observation Models Landmark Initialization Robot-Landmark Correlation
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
X t = a t + r t, (7.1)
") Chapter 7 State Space Models 71 Introduction State Space models, developed over the past 10 20 years, are alternative models for time series They include both the ARIMA models of Chapters 3 6 and the Classical
Chapter 7 State Space Models 71 Introduction State Space models, developed over the past 10 20 years, are alternative models for time series They include both the ARIMA models of Chapters 3 6 and the Classical
From Bayes to Extended Kalman Filter
 From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
From Bayes to Extended Kalman Filter Michal Reinštein Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception http://cmp.felk.cvut.cz/
Extended Kalman Filter Tutorial
 Extended Kalman Filter Tutorial Gabriel A. Terejanu Department of Computer Science and Engineering University at Buffalo, Buffalo, NY 14260 terejanu@buffalo.edu 1 Dynamic process Consider the following
Extended Kalman Filter Tutorial Gabriel A. Terejanu Department of Computer Science and Engineering University at Buffalo, Buffalo, NY 14260 terejanu@buffalo.edu 1 Dynamic process Consider the following
Characteristics of Time Series
 Characteristics of Time Series Al Nosedal University of Toronto January 12, 2016 Al Nosedal University of Toronto Characteristics of Time Series January 12, 2016 1 / 37 Signal and Noise In general, most
Characteristics of Time Series Al Nosedal University of Toronto January 12, 2016 Al Nosedal University of Toronto Characteristics of Time Series January 12, 2016 1 / 37 Signal and Noise In general, most
Kalman Filter and Ensemble Kalman Filter
 Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
On sequential data assimilation for scalar macroscopic traffic flow models
 On sequential data assimilation for scalar macroscopic traffic flow models Sébastien Blandin a,, Adrien Couque b, Alexandre Bayen c, Daniel Work d a Research Scientist, IBM Research Collaboratory Singapore.
On sequential data assimilation for scalar macroscopic traffic flow models Sébastien Blandin a,, Adrien Couque b, Alexandre Bayen c, Daniel Work d a Research Scientist, IBM Research Collaboratory Singapore.
Real-Time Travel Time Prediction Using Multi-level k-nearest Neighbor Algorithm and Data Fusion Method
 1861 Real-Time Travel Time Prediction Using Multi-level k-nearest Neighbor Algorithm and Data Fusion Method Sehyun Tak 1, Sunghoon Kim 2, Kiate Jang 3 and Hwasoo Yeo 4 1 Smart Transportation System Laboratory,
1861 Real-Time Travel Time Prediction Using Multi-level k-nearest Neighbor Algorithm and Data Fusion Method Sehyun Tak 1, Sunghoon Kim 2, Kiate Jang 3 and Hwasoo Yeo 4 1 Smart Transportation System Laboratory,
Handling nonlinearity in Ensemble Kalman Filter: Experiments with the three-variable Lorenz model
 Handling nonlinearity in Ensemble Kalman Filter: Experiments with the three-variable Lorenz model Shu-Chih Yang 1*, Eugenia Kalnay, and Brian Hunt 1. Department of Atmospheric Sciences, National Central
Handling nonlinearity in Ensemble Kalman Filter: Experiments with the three-variable Lorenz model Shu-Chih Yang 1*, Eugenia Kalnay, and Brian Hunt 1. Department of Atmospheric Sciences, National Central
Covariance Matrix Simplification For Efficient Uncertainty Management
 PASEO MaxEnt 2007 Covariance Matrix Simplification For Efficient Uncertainty Management André Jalobeanu, Jorge A. Gutiérrez PASEO Research Group LSIIT (CNRS/ Univ. Strasbourg) - Illkirch, France *part
PASEO MaxEnt 2007 Covariance Matrix Simplification For Efficient Uncertainty Management André Jalobeanu, Jorge A. Gutiérrez PASEO Research Group LSIIT (CNRS/ Univ. Strasbourg) - Illkirch, France *part
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
What do we know about EnKF?
 What do we know about EnKF? David Kelly Kody Law Andrew Stuart Andrew Majda Xin Tong Courant Institute New York University New York, NY April 10, 2015 CAOS seminar, Courant. David Kelly (NYU) EnKF April
What do we know about EnKF? David Kelly Kody Law Andrew Stuart Andrew Majda Xin Tong Courant Institute New York University New York, NY April 10, 2015 CAOS seminar, Courant. David Kelly (NYU) EnKF April
Factor Analysis and Kalman Filtering (11/2/04)
") CS281A/Stat241A: Statistical Learning Theory Factor Analysis and Kalman Filtering (11/2/04) Lecturer: Michael I. Jordan Scribes: Byung-Gon Chun and Sunghoon Kim 1 Factor Analysis Factor analysis is used
CS281A/Stat241A: Statistical Learning Theory Factor Analysis and Kalman Filtering (11/2/04) Lecturer: Michael I. Jordan Scribes: Byung-Gon Chun and Sunghoon Kim 1 Factor Analysis Factor analysis is used
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems. Eric Kostelich Data Mining Seminar, Feb. 6, 2006
 Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen 23, Ocean Dynamics, Vol 53, No 4 p.2 The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen 23, Ocean Dynamics, Vol 53, No 4 p.2 The Ensemble
Stability of Ensemble Kalman Filters
 Stability of Ensemble Kalman Filters Idrissa S. Amour, Zubeda Mussa, Alexander Bibov, Antti Solonen, John Bardsley, Heikki Haario and Tuomo Kauranne Lappeenranta University of Technology University of
Stability of Ensemble Kalman Filters Idrissa S. Amour, Zubeda Mussa, Alexander Bibov, Antti Solonen, John Bardsley, Heikki Haario and Tuomo Kauranne Lappeenranta University of Technology University of
Sequential Monte Carlo Samplers for Applications in High Dimensions
 Sequential Monte Carlo Samplers for Applications in High Dimensions Alexandros Beskos National University of Singapore KAUST, 26th February 2014 Joint work with: Dan Crisan, Ajay Jasra, Nik Kantas, Alex
Sequential Monte Carlo Samplers for Applications in High Dimensions Alexandros Beskos National University of Singapore KAUST, 26th February 2014 Joint work with: Dan Crisan, Ajay Jasra, Nik Kantas, Alex
Nonlinear Filtering. With Polynomial Chaos. Raktim Bhattacharya. Aerospace Engineering, Texas A&M University uq.tamu.edu
 Nonlinear Filtering With Polynomial Chaos Raktim Bhattacharya Aerospace Engineering, Texas A&M University uq.tamu.edu Nonlinear Filtering with PC Problem Setup. Dynamics: ẋ = f(x, ) Sensor Model: ỹ = h(x)
Nonlinear Filtering With Polynomial Chaos Raktim Bhattacharya Aerospace Engineering, Texas A&M University uq.tamu.edu Nonlinear Filtering with PC Problem Setup. Dynamics: ẋ = f(x, ) Sensor Model: ỹ = h(x)
EnKF Review. P.L. Houtekamer 7th EnKF workshop Introduction to the EnKF. Challenges. The ultimate global EnKF algorithm
 Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
The Kalman Filter. Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience. Sarah Dance
 The Kalman Filter Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading s.l.dance@reading.ac.uk July
The Kalman Filter Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading s.l.dance@reading.ac.uk July
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Transportation Big Data Analytics
 Transportation Big Data Analytics Regularization Xiqun (Michael) Chen College of Civil Engineering and Architecture Zhejiang University, Hangzhou, China Fall, 2016 Xiqun (Michael) Chen (Zhejiang University)
Transportation Big Data Analytics Regularization Xiqun (Michael) Chen College of Civil Engineering and Architecture Zhejiang University, Hangzhou, China Fall, 2016 Xiqun (Michael) Chen (Zhejiang University)
Constrained State Estimation Using the Unscented Kalman Filter
 16th Mediterranean Conference on Control and Automation Congress Centre, Ajaccio, France June 25-27, 28 Constrained State Estimation Using the Unscented Kalman Filter Rambabu Kandepu, Lars Imsland and
16th Mediterranean Conference on Control and Automation Congress Centre, Ajaccio, France June 25-27, 28 Constrained State Estimation Using the Unscented Kalman Filter Rambabu Kandepu, Lars Imsland and
Robotics 2 Data Association. Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard
 Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Robotics 2 Data Association Giorgio Grisetti, Cyrill Stachniss, Kai Arras, Wolfram Burgard Data Association Data association is the process of associating uncertain measurements to known tracks. Problem
Addressing the nonlinear problem of low order clustering in deterministic filters by using mean-preserving non-symmetric solutions of the ETKF
 Addressing the nonlinear problem of low order clustering in deterministic filters by using mean-preserving non-symmetric solutions of the ETKF Javier Amezcua, Dr. Kayo Ide, Dr. Eugenia Kalnay 1 Outline
Addressing the nonlinear problem of low order clustering in deterministic filters by using mean-preserving non-symmetric solutions of the ETKF Javier Amezcua, Dr. Kayo Ide, Dr. Eugenia Kalnay 1 Outline
EnKF and Catastrophic filter divergence
 EnKF and Catastrophic filter divergence David Kelly Kody Law Andrew Stuart Mathematics Department University of North Carolina Chapel Hill NC bkelly.com June 4, 2014 SIAM UQ 2014 Savannah. David Kelly
EnKF and Catastrophic filter divergence David Kelly Kody Law Andrew Stuart Mathematics Department University of North Carolina Chapel Hill NC bkelly.com June 4, 2014 SIAM UQ 2014 Savannah. David Kelly
Finite-size ensemble Kalman filters (EnKF-N)
") Finite-size ensemble Kalman filters (EnKF-N) Marc Bocquet (1,2), Pavel Sakov (3,4) (1) Université Paris-Est, CEREA, joint lab École des Ponts ParisTech and EdF R&D, France (2) INRIA, Paris-Rocquencourt
Finite-size ensemble Kalman filters (EnKF-N) Marc Bocquet (1,2), Pavel Sakov (3,4) (1) Université Paris-Est, CEREA, joint lab École des Ponts ParisTech and EdF R&D, France (2) INRIA, Paris-Rocquencourt
Enhancing information transfer from observations to unobserved state variables for mesoscale radar data assimilation
 Enhancing information transfer from observations to unobserved state variables for mesoscale radar data assimilation Weiguang Chang and Isztar Zawadzki Department of Atmospheric and Oceanic Sciences Faculty
Enhancing information transfer from observations to unobserved state variables for mesoscale radar data assimilation Weiguang Chang and Isztar Zawadzki Department of Atmospheric and Oceanic Sciences Faculty
Intelligent Embedded Systems Uncertainty, Information and Learning Mechanisms (Part 1)
") Advanced Research Intelligent Embedded Systems Uncertainty, Information and Learning Mechanisms (Part 1) Intelligence for Embedded Systems Ph. D. and Master Course Manuel Roveri Politecnico di Milano,
Advanced Research Intelligent Embedded Systems Uncertainty, Information and Learning Mechanisms (Part 1) Intelligence for Embedded Systems Ph. D. and Master Course Manuel Roveri Politecnico di Milano,
Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations
 Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations Department of Biomedical Engineering and Computational Science Aalto University April 28, 2010 Contents 1 Multiple Model
Lecture 6: Multiple Model Filtering, Particle Filtering and Other Approximations Department of Biomedical Engineering and Computational Science Aalto University April 28, 2010 Contents 1 Multiple Model
ARIMA Modelling and Forecasting
 ARIMA Modelling and Forecasting Economic time series often appear nonstationary, because of trends, seasonal patterns, cycles, etc. However, the differences may appear stationary. Δx t x t x t 1 (first
ARIMA Modelling and Forecasting Economic time series often appear nonstationary, because of trends, seasonal patterns, cycles, etc. However, the differences may appear stationary. Δx t x t x t 1 (first
Nonlinear and/or Non-normal Filtering. Jesús Fernández-Villaverde University of Pennsylvania
 Nonlinear and/or Non-normal Filtering Jesús Fernández-Villaverde University of Pennsylvania 1 Motivation Nonlinear and/or non-gaussian filtering, smoothing, and forecasting (NLGF) problems are pervasive
Nonlinear and/or Non-normal Filtering Jesús Fernández-Villaverde University of Pennsylvania 1 Motivation Nonlinear and/or non-gaussian filtering, smoothing, and forecasting (NLGF) problems are pervasive
A variance limiting Kalman filter for data assimilation: I. Sparse observational grids II. Model error
 A variance limiting Kalman filter for data assimilation: I. Sparse observational grids II. Model error Georg Gottwald, Lewis Mitchell, Sebastian Reich* University of Sydney, *Universität Potsdam Durham,
A variance limiting Kalman filter for data assimilation: I. Sparse observational grids II. Model error Georg Gottwald, Lewis Mitchell, Sebastian Reich* University of Sydney, *Universität Potsdam Durham,
Ensemble square-root filters
 Ensemble square-root filters MICHAEL K. TIPPETT International Research Institute for climate prediction, Palisades, New Yor JEFFREY L. ANDERSON GFDL, Princeton, New Jersy CRAIG H. BISHOP Naval Research
Ensemble square-root filters MICHAEL K. TIPPETT International Research Institute for climate prediction, Palisades, New Yor JEFFREY L. ANDERSON GFDL, Princeton, New Jersy CRAIG H. BISHOP Naval Research
The Kalman Filter. An Algorithm for Dealing with Uncertainty. Steven Janke. May Steven Janke (Seminar) The Kalman Filter May / 29
 The Kalman Filter May / 29") The Kalman Filter An Algorithm for Dealing with Uncertainty Steven Janke May 2011 Steven Janke (Seminar) The Kalman Filter May 2011 1 / 29 Autonomous Robots Steven Janke (Seminar) The Kalman Filter May
The Kalman Filter An Algorithm for Dealing with Uncertainty Steven Janke May 2011 Steven Janke (Seminar) The Kalman Filter May 2011 1 / 29 Autonomous Robots Steven Janke (Seminar) The Kalman Filter May
An Ensemble Kalman Filter for NWP based on Variational Data Assimilation: VarEnKF
 An Ensemble Kalman Filter for NWP based on Variational Data Assimilation: VarEnKF Blueprints for Next-Generation Data Assimilation Systems Workshop 8-10 March 2016 Mark Buehner Data Assimilation and Satellite
An Ensemble Kalman Filter for NWP based on Variational Data Assimilation: VarEnKF Blueprints for Next-Generation Data Assimilation Systems Workshop 8-10 March 2016 Mark Buehner Data Assimilation and Satellite
A data-driven method for improving the correlation estimation in serial ensemble Kalman filter
 A data-driven method for improving the correlation estimation in serial ensemble Kalman filter Michèle De La Chevrotière, 1 John Harlim 2 1 Department of Mathematics, Penn State University, 2 Department
A data-driven method for improving the correlation estimation in serial ensemble Kalman filter Michèle De La Chevrotière, 1 John Harlim 2 1 Department of Mathematics, Penn State University, 2 Department
A Spectral Approach to Linear Bayesian Updating
 A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
4DEnVar. Four-Dimensional Ensemble-Variational Data Assimilation. Colloque National sur l'assimilation de données
 Four-Dimensional Ensemble-Variational Data Assimilation 4DEnVar Colloque National sur l'assimilation de données Andrew Lorenc, Toulouse France. 1-3 décembre 2014 Crown copyright Met Office 4DEnVar: Topics
Four-Dimensional Ensemble-Variational Data Assimilation 4DEnVar Colloque National sur l'assimilation de données Andrew Lorenc, Toulouse France. 1-3 décembre 2014 Crown copyright Met Office 4DEnVar: Topics