Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Root Locus
|
|
|
- Jeremy Bryant
- 5 years ago
- Views:
Transcription
1
2 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign 2 Due 8 Bode Plots 9 Bode Plots 2 10 State Space Modeling Assign 3 Due 11 State Space Design Techniques 12 Advanced Control Topics 13 Review Assign 4 Due Dr. Ian R. Manchester Amme 3500 : Introduction Slide 2
3 System 1 (e.g. Controller) System 2 (e.g. Process) System 1 affects system 2, which affects system 1, which affects system 2. Slide 3
4 Vehicle Control and Design (land, sea, air, space) understanding and controlling how the system responds to external disturbances Biomedical (cardiac system, dialysis machine) design and control of systems that interact with the human body. Manufacturing Processes controlled conditions for highperformance materials, pharmaceuticals, microsystems. Biological feedback systems that regulate pressures, concentrations, balance, etc Slide 4
5 Design the dynamics Sluggish systems become quick to respond Unstable systems become stable and predictable Robustness Reject disturbances acting on the system Same response with large variations in the system Slide 5
6 Pole location of a linear time-invariant system determines many important system properties such as: Stability, settling time, overshoot, rise time, oscillation. Slide 6
7 Feedback is important because of the ability to stabilize unstable systems, react to disturbances, and reduce sensitivity to changing system properties. But how does feedback affect system properties? I.e. what happens to pole locations under feedback? Slide 7

8 Slide 8
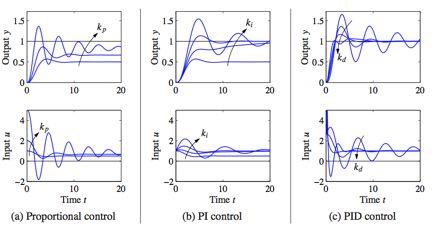
9 Same torsional setup as before P control: K=100 PD control: K(s)=100+10s PID control: K(s)=80+60/s+6s Note the zero steady-state error for PID Slide 9
10 PID with Different spring constants: k =5 (nominal), 7.5, and 2.5 Nm/rad Slide 10
 Slide")
11 r(t) G d G n d(t) Slide 11
12 For the moment let us examine a proportional controller. (Other control structures such as integral and derivative terms may be lumped in to G(s)). R(s) E(s) C(s) + - K G(s) Slide 12
13 Closed-loop transfer function is: T(s) = KG(s) 1+ KG(s) For example, if G(s) = 1 (s + a)(s + b) Then T(s) = K s 2 + (a + b)s + ab + k Slide 13
14 We could compute the system parameters as a (highly nonlinear) function of the gain, K Then for each possible K, computer system parameters and try to find one that fits. Trial and error is not a good design principle! Slide 14

15 In 1948 Walter Evans invented a technique for analysis of feedback systems while working as a summer intern at North American Aviation (now Rockwell International). It gives surprisingly simple rules for how pole locations change when feedback gain is adjusted Despite the huge changes in computational power since then, it is so intuitive and useful that it is still widely used for design and analysis Slide 15
16 Consider a simple control system: tilt control on a camera. Open loop poles are at zero and -10. How can we choose a feedback gain to give some desired performance? Slide 16
17 We could determine the closed loop poles as a function of the gain for the system Slide 17
18 The individual pole locations The root locus Slide 18
19 Remember our description of system specs as a function of pole location. So by increasing gain we can reduce settling time up to a point, beyond that we will induce large overshoot. The system always remains stable! n (decreasing T r ) Slide 19
20 We can easily derive the root locus for a second order system What about for a general, possibly higher order, control system? Poles exist when the characteristic equation (denominator) is zero Slide 20
21 How do we find values of s and K that satisfy the characteristic equation? This holds when Slide 21
22 Rule 1 : Number of Branches the n branches of the root locus start at the poles For K=0, this suggests that the denominator must be zero (equivalent to the poles of the OL TF) The number of branches in the root locus therefore equals the number of open loop poles Slide 22
23 Rule 2 : Symmetry - The root locus is symmetrical about the real axis. This is a result of the fact that complex poles will always occur in conjugate pairs. (otherwise coefficients of the system s differential equations would be complex, which is not physical) Slide 23
24 Rule 3 Real Axis Segments According to the angle criteria, points on the root locus will yield an angle of (2k+1)180 o. On the real axis, angles from complex poles and zeros are cancelled. Poles and zeros to the left have an angle of 0 o. This implies that roots will lie to the left of an odd number of real-axis, finite open-loop poles and/or finite open-loop zeros. Slide 24
25 Rule 4 Starting and Ending Points As we saw, the root locus will start at the open loop poles The root locus will approach the open loop zeros as K approaches! Since there are likely to be less zeros than poles, some branches may approach! Slide 25
26 Consider the system at right The closed loop transfer function for this system is given by Difficult to evaluate the root location as a function of K Slide 26
27 Open loop poles and zeros First plot the OL poles and zeros in the s-plane This provides us with the likely starting (poles) and ending (zeros) points for the root locus Slide 27
28 Real axis segments Along the real axis, the root locus is to the left of an odd number of poles and zeros Slide 28
29 Starting and end points The root locus will start from the OL poles and approach the OL zeros as K approaches infinity Even with a rough sketch, we can determine what the root locus will look like Slide 29
30 Rule 5 Behaviour at infinity For large s and K, n-m of the loci are asymptotic to straight lines in the s-plane The equations of the asymptotes are given by the real-axis intercept, " a, and angle, # a Where k = 0, ±1, ±2, and the angle is given in radians relative to the positive real axis Slide 30
31 Why does this hold? We can write the characteristic equation as This can be approximated by For large s, this is the equation for a system with n-m poles clustered at s=" Slide 31
32 Here we have four OL poles and one OL zero We would therefore expect n-m = 3 distinct asymptotes in the root locus plot Slide 32
33 We can calculate the equations of the asymptotes, yielding Slide 33
34 For poles on the real axis, the locus will depart at 0 o or 180 o For complex poles, the angle of departure can be calculated by considering the angle criteria Slide 34
35 A similar approach can be used to calculate the angle of arrival of the zeros Slide 35
36 We may also be interested in the gain at which the locus crosses the imaginary axis This will determine the gain with which the system becomes unstable Slide 36
37 All of this probably seems somewhat complicated Fortunately, Matlab provides us with tools for plotting the root locus It is still important to be able to sketch the root locus by hand because This gives us an understanding to be applied to designing controllers It will probably appear on the exam Slide 37
38 As we saw previously, the specifications for a second order system are often used in designing a system The resulting system performance must be evaluated in light of the true system performance The root locus provides us with a tool with which we can design for a transient response of interest Slide 38
39 We would usually follow these steps Sketch the root locus Assume the system is second order and find the gain to meet the transient response specifications Justify the second-order assumptions by finding the location of all higher-order poles If the assumptions are not justified, system response should be simulated to ensure that it meets the specifications Slide 39
40 Recall that for a second order system with no finite zeros, the transient response parameters are approximated by Rise time : Overshoot : Settling Time (2%) : Slide 40
41 Recall the system presented earlier Determine a value of the gain K to yield a 5% percent overshoot For a second order system, we could find K explicitly Slide 41
42 Examining the transfer function Solve for K given the desired damping ratio specified by the desired overshoot Slide 42
43 Im(s) Alternatively, we can examine the Root Locus S=5+5.1j x #=sin -1!$ x x Re(s) x Slide 43
44 We can use Matlab to generate the root locus!% define the OL system! sys=tf(1,[1 10 0])! % plot the root locus! rlocus(sys)! Slide 44
45 We also need to verify the resulting step response % set up the closed loop TF! cl=51*sys/(1+51*sys)! % plot the step response! step(cl)! Slide 45
46 Consider this system This is a third order system with an additional pole Determine a value of the gain K to yield a 5% percent overshoot Slide 46
47 With the higher order poles, the 2 nd order assumptions are violated However, we can use the RL to guide our design and iterate to find a suitable solution Slide 47
48 The gain found based on the 2 nd order assumption yields a higher overshoot We could then reduce the gain to reduce the overshoot Slide 48
49 The preceding developments have been presented for a system in which the design parameter is the forward path gain In some instances, we may need to design systems using other system parameters In general, we can convert to a form in which the parameter of interest is in the required form Slide 49
50 Consider a system of this form The open loop transfer function is no longer of the familiar form KG(s)H (s) Rearrange to isolate p 1 Now we can sketch the root locus as a function of p 1 Slide 50
51 This results in the following root locus as a function of the parameter p 1 Slide 51

52 As well as adjusting gains, you can add poles and zeros to your controller Doing so you can make a PID, or any other linear controller Understanding how the root locus is shaped by presence of poles and zeros is critical Slide 52
53 Nise Sections Franklin & Powell Section Slide 53
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Course Outline. Designing Control Systems. Proportional Controller. Amme 3500 : System Dynamics and Control. Root Locus. Dr. Stefan B.
 Amme 3500 : System Dyamics ad Cotrol Root Locus Course Outlie Week Date Cotet Assigmet Notes Mar Itroductio 8 Mar Frequecy Domai Modellig 3 5 Mar Trasiet Performace ad the s-plae 4 Mar Block Diagrams Assig
Amme 3500 : System Dyamics ad Cotrol Root Locus Course Outlie Week Date Cotet Assigmet Notes Mar Itroductio 8 Mar Frequecy Domai Modellig 3 5 Mar Trasiet Performace ad the s-plae 4 Mar Block Diagrams Assig
Control Systems Engineering ( Chapter 8. Root Locus Techniques ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Systems Engineering ( Chapter 8. Root Locus Techniques ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Introduction In this lesson, you will learn the following : The
Control Systems Engineering ( Chapter 8. Root Locus Techniques ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Introduction In this lesson, you will learn the following : The
Software Engineering 3DX3. Slides 8: Root Locus Techniques
 Software Engineering 3DX3 Slides 8: Root Locus Techniques Dr. Ryan Leduc Department of Computing and Software McMaster University Material based on Control Systems Engineering by N. Nise. c 2006, 2007
Software Engineering 3DX3 Slides 8: Root Locus Techniques Dr. Ryan Leduc Department of Computing and Software McMaster University Material based on Control Systems Engineering by N. Nise. c 2006, 2007
I What is root locus. I System analysis via root locus. I How to plot root locus. Root locus (RL) I Uses the poles and zeros of the OL TF
 I Uses the poles and zeros of the OL TF") EE C28 / ME C34 Feedback Control Systems Lecture Chapter 8 Root Locus Techniques Lecture abstract Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley
EE C28 / ME C34 Feedback Control Systems Lecture Chapter 8 Root Locus Techniques Lecture abstract Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley
a. Closed-loop system; b. equivalent transfer function Then the CLTF () T is s the poles of () T are s from a contribution of a
 T is s the poles of () T are s from a contribution of a") Root Locus Simple definition Locus of points on the s- plane that represents the poles of a system as one or more parameter vary. RL and its relation to poles of a closed loop system RL and its relation
Root Locus Simple definition Locus of points on the s- plane that represents the poles of a system as one or more parameter vary. RL and its relation to poles of a closed loop system RL and its relation
Alireza Mousavi Brunel University
 Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
(b) A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:
 A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:") 1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
Bangladesh University of Engineering and Technology. EEE 402: Control System I Laboratory
 Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Unit 7: Part 1: Sketching the Root Locus
 Root Locus Unit 7: Part 1: Sketching the Root Locus Engineering 5821: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland March 14, 2010 ENGI 5821 Unit 7: Root
Root Locus Unit 7: Part 1: Sketching the Root Locus Engineering 5821: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland March 14, 2010 ENGI 5821 Unit 7: Root
Controls Problems for Qualifying Exam - Spring 2014
 Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Outline. Classical Control. Lecture 5
 Outline Outline Outline 1 What is 2 Outline What is Why use? Sketching a 1 What is Why use? Sketching a 2 Gain Controller Lead Compensation Lag Compensation What is Properties of a General System Why use?
Outline Outline Outline 1 What is 2 Outline What is Why use? Sketching a 1 What is Why use? Sketching a 2 Gain Controller Lead Compensation Lag Compensation What is Properties of a General System Why use?
Course Outline. Closed Loop Stability. Stability. Amme 3500 : System Dynamics & Control. Nyquist Stability. Dr. Dunant Halim
 Amme 3 : System Dynamics & Control Nyquist Stability Dr. Dunant Halim Course Outline Week Date Content Assignment Notes 1 5 Mar Introduction 2 12 Mar Frequency Domain Modelling 3 19 Mar System Response
Amme 3 : System Dynamics & Control Nyquist Stability Dr. Dunant Halim Course Outline Week Date Content Assignment Notes 1 5 Mar Introduction 2 12 Mar Frequency Domain Modelling 3 19 Mar System Response
Controller Design using Root Locus
 Chapter 4 Controller Design using Root Locus 4. PD Control Root locus is a useful tool to design different types of controllers. Below, we will illustrate the design of proportional derivative controllers
Chapter 4 Controller Design using Root Locus 4. PD Control Root locus is a useful tool to design different types of controllers. Below, we will illustrate the design of proportional derivative controllers
SECTION 5: ROOT LOCUS ANALYSIS
 SECTION 5: ROOT LOCUS ANALYSIS MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed loop transfer function is 1 is the forward path
SECTION 5: ROOT LOCUS ANALYSIS MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed loop transfer function is 1 is the forward path
Example on Root Locus Sketching and Control Design
 Example on Root Locus Sketching and Control Design MCE44 - Spring 5 Dr. Richter April 25, 25 The following figure represents the system used for controlling the robotic manipulator of a Mars Rover. We
Example on Root Locus Sketching and Control Design MCE44 - Spring 5 Dr. Richter April 25, 25 The following figure represents the system used for controlling the robotic manipulator of a Mars Rover. We
Lecture 1 Root Locus
 Root Locus ELEC304-Alper Erdogan 1 1 Lecture 1 Root Locus What is Root-Locus? : A graphical representation of closed loop poles as a system parameter varied. Based on Root-Locus graph we can choose the
Root Locus ELEC304-Alper Erdogan 1 1 Lecture 1 Root Locus What is Root-Locus? : A graphical representation of closed loop poles as a system parameter varied. Based on Root-Locus graph we can choose the
CHAPTER # 9 ROOT LOCUS ANALYSES
 F K א CHAPTER # 9 ROOT LOCUS ANALYSES 1. Introduction The basic characteristic of the transient response of a closed-loop system is closely related to the location of the closed-loop poles. If the system
F K א CHAPTER # 9 ROOT LOCUS ANALYSES 1. Introduction The basic characteristic of the transient response of a closed-loop system is closely related to the location of the closed-loop poles. If the system
ECE 345 / ME 380 Introduction to Control Systems Lecture Notes 8
 Learning Objectives ECE 345 / ME 380 Introduction to Control Systems Lecture Notes 8 Dr. Oishi oishi@unm.edu November 2, 203 State the phase and gain properties of a root locus Sketch a root locus, by
Learning Objectives ECE 345 / ME 380 Introduction to Control Systems Lecture Notes 8 Dr. Oishi oishi@unm.edu November 2, 203 State the phase and gain properties of a root locus Sketch a root locus, by
Course Outline. Higher Order Poles: Example. Higher Order Poles. Amme 3500 : System Dynamics & Control. State Space Design. 1 G(s) = s(s + 2)(s +10)
 = s(s + 2)(s +10)") Amme 35 : System Dynamics Control State Space Design Course Outline Week Date Content Assignment Notes 1 1 Mar Introduction 2 8 Mar Frequency Domain Modelling 3 15 Mar Transient Performance and the s-plane
Amme 35 : System Dynamics Control State Space Design Course Outline Week Date Content Assignment Notes 1 1 Mar Introduction 2 8 Mar Frequency Domain Modelling 3 15 Mar Transient Performance and the s-plane
Root Locus Methods. The root locus procedure
 Root Locus Methods Design of a position control system using the root locus method Design of a phase lag compensator using the root locus method The root locus procedure To determine the value of the gain
Root Locus Methods Design of a position control system using the root locus method Design of a phase lag compensator using the root locus method The root locus procedure To determine the value of the gain
Problems -X-O («) s-plane. s-plane *~8 -X -5. id) X s-plane. s-plane. -* Xtg) FIGURE P8.1. j-plane. JO) k JO)
 s-plane. s-plane *~8 -X -5. id) X s-plane. s-plane. -* Xtg) FIGURE P8.1. j-plane. JO) k JO)") Problems 1. For each of the root loci shown in Figure P8.1, tell whether or not the sketch can be a root locus. If the sketch cannot be a root locus, explain why. Give all reasons. [Section: 8.4] *~8 -X-O
Problems 1. For each of the root loci shown in Figure P8.1, tell whether or not the sketch can be a root locus. If the sketch cannot be a root locus, explain why. Give all reasons. [Section: 8.4] *~8 -X-O
Root locus Analysis. P.S. Gandhi Mechanical Engineering IIT Bombay. Acknowledgements: Mr Chaitanya, SYSCON 07
 Root locus Analysis P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: Mr Chaitanya, SYSCON 07 Recap R(t) + _ k p + k s d 1 s( s+ a) C(t) For the above system the closed loop transfer function
Root locus Analysis P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: Mr Chaitanya, SYSCON 07 Recap R(t) + _ k p + k s d 1 s( s+ a) C(t) For the above system the closed loop transfer function
Dr. Ian R. Manchester
 Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
Dr Ian R. Manchester Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus
Course roadmap. ME451: Control Systems. What is Root Locus? (Review) Characteristic equation & root locus. Lecture 18 Root locus: Sketch of proofs
 Characteristic equation & root locus. Lecture 18 Root locus: Sketch of proofs") ME451: Control Systems Modeling Course roadmap Analysis Design Lecture 18 Root locus: Sketch of proofs Dr. Jongeun Choi Department of Mechanical Engineering Michigan State University Laplace transform
ME451: Control Systems Modeling Course roadmap Analysis Design Lecture 18 Root locus: Sketch of proofs Dr. Jongeun Choi Department of Mechanical Engineering Michigan State University Laplace transform
Step input, ramp input, parabolic input and impulse input signals. 2. What is the initial slope of a step response of a first order system?
 IC6501 CONTROL SYSTEM UNIT-II TIME RESPONSE PART-A 1. What are the standard test signals employed for time domain studies?(or) List the standard test signals used in analysis of control systems? (April
IC6501 CONTROL SYSTEM UNIT-II TIME RESPONSE PART-A 1. What are the standard test signals employed for time domain studies?(or) List the standard test signals used in analysis of control systems? (April
7.4 STEP BY STEP PROCEDURE TO DRAW THE ROOT LOCUS DIAGRAM
 ROOT LOCUS TECHNIQUE. Values of on the root loci The value of at any point s on the root loci is determined from the following equation G( s) H( s) Product of lengths of vectors from poles of G( s)h( s)
ROOT LOCUS TECHNIQUE. Values of on the root loci The value of at any point s on the root loci is determined from the following equation G( s) H( s) Product of lengths of vectors from poles of G( s)h( s)
Unit 7: Part 1: Sketching the Root Locus. Root Locus. Vector Representation of Complex Numbers
 Root Locus Root Locus Unit 7: Part 1: Sketching the Root Locus Engineering 5821: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland 1 Root Locus Vector Representation
Root Locus Root Locus Unit 7: Part 1: Sketching the Root Locus Engineering 5821: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland 1 Root Locus Vector Representation
Chapter 7 : Root Locus Technique
 Chapter 7 : Root Locus Technique By Electrical Engineering Department College of Engineering King Saud University 1431-143 7.1. Introduction 7.. Basics on the Root Loci 7.3. Characteristics of the Loci
Chapter 7 : Root Locus Technique By Electrical Engineering Department College of Engineering King Saud University 1431-143 7.1. Introduction 7.. Basics on the Root Loci 7.3. Characteristics of the Loci
Automatic Control (TSRT15): Lecture 4
: Lecture 4") Automatic Control (TSRT15): Lecture 4 Tianshi Chen Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 Review of the last
Automatic Control (TSRT15): Lecture 4 Tianshi Chen Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 Review of the last
INTRODUCTION TO DIGITAL CONTROL
 ECE4540/5540: Digital Control Systems INTRODUCTION TO DIGITAL CONTROL.: Introduction In ECE450/ECE550 Feedback Control Systems, welearnedhow to make an analog controller D(s) to control a linear-time-invariant
ECE4540/5540: Digital Control Systems INTRODUCTION TO DIGITAL CONTROL.: Introduction In ECE450/ECE550 Feedback Control Systems, welearnedhow to make an analog controller D(s) to control a linear-time-invariant
MAK 391 System Dynamics & Control. Presentation Topic. The Root Locus Method. Student Number: Group: I-B. Name & Surname: Göksel CANSEVEN
 MAK 391 System Dynamics & Control Presentation Topic The Root Locus Method Student Number: 9901.06047 Group: I-B Name & Surname: Göksel CANSEVEN Date: December 2001 The Root-Locus Method Göksel CANSEVEN
MAK 391 System Dynamics & Control Presentation Topic The Root Locus Method Student Number: 9901.06047 Group: I-B Name & Surname: Göksel CANSEVEN Date: December 2001 The Root-Locus Method Göksel CANSEVEN
Control Systems I. Lecture 7: Feedback and the Root Locus method. Readings: Guzzella 9.1-3, Emilio Frazzoli
 Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Guzzella 9.1-3, 13.3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 3, 2017 E. Frazzoli (ETH)
Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Guzzella 9.1-3, 13.3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 3, 2017 E. Frazzoli (ETH)
Lecture 5 Classical Control Overview III. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
Methods for analysis and control of dynamical systems Lecture 4: The root locus design method
 Methods for analysis and control of Lecture 4: The root locus design method O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.inpg.fr www.gipsa-lab.fr/ o.sename 5th February 2015 Outline
Methods for analysis and control of Lecture 4: The root locus design method O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.inpg.fr www.gipsa-lab.fr/ o.sename 5th February 2015 Outline
Course roadmap. Step response for 2nd-order system. Step response for 2nd-order system
 ME45: Control Systems Lecture Time response of nd-order systems Prof. Clar Radcliffe and Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Laplace transform Transfer
ME45: Control Systems Lecture Time response of nd-order systems Prof. Clar Radcliffe and Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Laplace transform Transfer
Root Locus Techniques
 Root Locus Techniques 8 Chapter Learning Outcomes After completing this chapter the student will be able to: Define a root locus (Sections 8.1 8.2) State the properties of a root locus (Section 8.3) Sketch
Root Locus Techniques 8 Chapter Learning Outcomes After completing this chapter the student will be able to: Define a root locus (Sections 8.1 8.2) State the properties of a root locus (Section 8.3) Sketch
CHAPTER 7 : BODE PLOTS AND GAIN ADJUSTMENTS COMPENSATION
 CHAPTER 7 : BODE PLOTS AND GAIN ADJUSTMENTS COMPENSATION Objectives Students should be able to: Draw the bode plots for first order and second order system. Determine the stability through the bode plots.
CHAPTER 7 : BODE PLOTS AND GAIN ADJUSTMENTS COMPENSATION Objectives Students should be able to: Draw the bode plots for first order and second order system. Determine the stability through the bode plots.
CHAPTER 1 Basic Concepts of Control System. CHAPTER 6 Hydraulic Control System
 CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
Dynamic Compensation using root locus method
 CAIRO UNIVERSITY FACULTY OF ENGINEERING ELECTRONICS & COMMUNICATIONS DEP. 3rd YEAR, 00/0 CONTROL ENGINEERING SHEET 9 Dynamic Compensation using root locus method [] (Final00)For the system shown in the
CAIRO UNIVERSITY FACULTY OF ENGINEERING ELECTRONICS & COMMUNICATIONS DEP. 3rd YEAR, 00/0 CONTROL ENGINEERING SHEET 9 Dynamic Compensation using root locus method [] (Final00)For the system shown in the
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593
 LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA CONTROL SYSTEM I LAB. MANUAL EE 593 EXPERIMENT
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA CONTROL SYSTEM I LAB. MANUAL EE 593 EXPERIMENT
Control Systems I. Lecture 7: Feedback and the Root Locus method. Readings: Jacopo Tani. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Root Locus. Signals and Systems: 3C1 Control Systems Handout 3 Dr. David Corrigan Electronic and Electrical Engineering
 Root Locus Signals and Systems: 3C1 Control Systems Handout 3 Dr. David Corrigan Electronic and Electrical Engineering corrigad@tcd.ie Recall, the example of the PI controller car cruise control system.
Root Locus Signals and Systems: 3C1 Control Systems Handout 3 Dr. David Corrigan Electronic and Electrical Engineering corrigad@tcd.ie Recall, the example of the PI controller car cruise control system.
Control Systems. University Questions
 University Questions UNIT-1 1. Distinguish between open loop and closed loop control system. Describe two examples for each. (10 Marks), Jan 2009, June 12, Dec 11,July 08, July 2009, Dec 2010 2. Write
University Questions UNIT-1 1. Distinguish between open loop and closed loop control system. Describe two examples for each. (10 Marks), Jan 2009, June 12, Dec 11,July 08, July 2009, Dec 2010 2. Write
Performance of Feedback Control Systems
 Performance of Feedback Control Systems Design of a PID Controller Transient Response of a Closed Loop System Damping Coefficient, Natural frequency, Settling time and Steady-state Error and Type 0, Type
Performance of Feedback Control Systems Design of a PID Controller Transient Response of a Closed Loop System Damping Coefficient, Natural frequency, Settling time and Steady-state Error and Type 0, Type
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 15: Root Locus Part 4 Overview In this Lecture, you will learn: Which Poles go to Zeroes? Arrival Angles Picking Points? Calculating
Systems Analysis and Control Matthew M. Peet Arizona State University Lecture 15: Root Locus Part 4 Overview In this Lecture, you will learn: Which Poles go to Zeroes? Arrival Angles Picking Points? Calculating
School of Mechanical Engineering Purdue University. DC Motor Position Control The block diagram for position control of the servo table is given by:
 Root Locus Motivation Sketching Root Locus Examples ME375 Root Locus - 1 Servo Table Example DC Motor Position Control The block diagram for position control of the servo table is given by: θ D 0.09 See
Root Locus Motivation Sketching Root Locus Examples ME375 Root Locus - 1 Servo Table Example DC Motor Position Control The block diagram for position control of the servo table is given by: θ D 0.09 See
Control of Manufacturing Processes
 Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #19 Position Control and Root Locus Analysis" April 22, 2004 The Position Servo Problem, reference position NC Control Robots Injection
Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #19 Position Control and Root Locus Analysis" April 22, 2004 The Position Servo Problem, reference position NC Control Robots Injection
Systems Analysis and Control
 Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 12: Overview In this Lecture, you will learn: Review of Feedback Closing the Loop Pole Locations Changing the Gain
Systems Analysis and Control Matthew M. Peet Illinois Institute of Technology Lecture 12: Overview In this Lecture, you will learn: Review of Feedback Closing the Loop Pole Locations Changing the Gain
ECE 486 Control Systems
 ECE 486 Control Systems Spring 208 Midterm #2 Information Issued: April 5, 208 Updated: April 8, 208 ˆ This document is an info sheet about the second exam of ECE 486, Spring 208. ˆ Please read the following
ECE 486 Control Systems Spring 208 Midterm #2 Information Issued: April 5, 208 Updated: April 8, 208 ˆ This document is an info sheet about the second exam of ECE 486, Spring 208. ˆ Please read the following
If you need more room, use the backs of the pages and indicate that you have done so.
 EE 343 Exam II Ahmad F. Taha Spring 206 Your Name: Your Signature: Exam duration: hour and 30 minutes. This exam is closed book, closed notes, closed laptops, closed phones, closed tablets, closed pretty
EE 343 Exam II Ahmad F. Taha Spring 206 Your Name: Your Signature: Exam duration: hour and 30 minutes. This exam is closed book, closed notes, closed laptops, closed phones, closed tablets, closed pretty
Chapter 7 Control. Part Classical Control. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering Dynamics and Control II Fall K(s +1)(s +2) G(s) =.
(s +2) G(s) =.") MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering. Dynamics and Control II Fall 7 Problem Set #7 Solution Posted: Friday, Nov., 7. Nise problem 5 from chapter 8, page 76. Answer:
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering. Dynamics and Control II Fall 7 Problem Set #7 Solution Posted: Friday, Nov., 7. Nise problem 5 from chapter 8, page 76. Answer:
Methods for analysis and control of. Lecture 4: The root locus design method
 Methods for analysis and control of Lecture 4: The root locus design method O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.inpg.fr www.lag.ensieg.inpg.fr/sename Lead Lag 17th March
Methods for analysis and control of Lecture 4: The root locus design method O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.inpg.fr www.lag.ensieg.inpg.fr/sename Lead Lag 17th March
Chemical Process Dynamics and Control. Aisha Osman Mohamed Ahmed Department of Chemical Engineering Faculty of Engineering, Red Sea University
 Chemical Process Dynamics and Control Aisha Osman Mohamed Ahmed Department of Chemical Engineering Faculty of Engineering, Red Sea University 1 Chapter 4 System Stability 2 Chapter Objectives End of this
Chemical Process Dynamics and Control Aisha Osman Mohamed Ahmed Department of Chemical Engineering Faculty of Engineering, Red Sea University 1 Chapter 4 System Stability 2 Chapter Objectives End of this
Module 3F2: Systems and Control EXAMPLES PAPER 2 ROOT-LOCUS. Solutions
 Cambridge University Engineering Dept. Third Year Module 3F: Systems and Control EXAMPLES PAPER ROOT-LOCUS Solutions. (a) For the system L(s) = (s + a)(s + b) (a, b both real) show that the root-locus
Cambridge University Engineering Dept. Third Year Module 3F: Systems and Control EXAMPLES PAPER ROOT-LOCUS Solutions. (a) For the system L(s) = (s + a)(s + b) (a, b both real) show that the root-locus
Lecture Sketching the root locus
 Lecture 05.02 Sketching the root locus It is easy to get lost in the detailed rules of manual root locus construction. In the old days accurate root locus construction was critical, but now it is useful
Lecture 05.02 Sketching the root locus It is easy to get lost in the detailed rules of manual root locus construction. In the old days accurate root locus construction was critical, but now it is useful
Lecture 12. Upcoming labs: Final Exam on 12/21/2015 (Monday)10:30-12:30
10:30-12:30") 289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
Course Summary. The course cannot be summarized in one lecture.
 Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRONICS & COMMUNICATION ENGINEERING SUBJECT QUESTION BANK : EC6405 CONTROL SYSTEM ENGINEERING SEM / YEAR: IV / II year
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRONICS & COMMUNICATION ENGINEERING SUBJECT QUESTION BANK : EC6405 CONTROL SYSTEM ENGINEERING SEM / YEAR: IV / II year
Test 2 SOLUTIONS. ENGI 5821: Control Systems I. March 15, 2010
 Test 2 SOLUTIONS ENGI 5821: Control Systems I March 15, 2010 Total marks: 20 Name: Student #: Answer each question in the space provided or on the back of a page with an indication of where to find the
Test 2 SOLUTIONS ENGI 5821: Control Systems I March 15, 2010 Total marks: 20 Name: Student #: Answer each question in the space provided or on the back of a page with an indication of where to find the
1 (20 pts) Nyquist Exercise
 Nyquist Exercise") EE C128 / ME134 Problem Set 6 Solution Fall 2011 1 (20 pts) Nyquist Exercise Consider a close loop system with unity feedback. For each G(s), hand sketch the Nyquist diagram, determine Z = P N, algebraically
EE C128 / ME134 Problem Set 6 Solution Fall 2011 1 (20 pts) Nyquist Exercise Consider a close loop system with unity feedback. For each G(s), hand sketch the Nyquist diagram, determine Z = P N, algebraically
Introduction to Root Locus. What is root locus?
 Introduction to Root Locus What is root locus? A graphical representation of the closed loop poles as a system parameter (Gain K) is varied Method of analysis and design for stability and transient response
Introduction to Root Locus What is root locus? A graphical representation of the closed loop poles as a system parameter (Gain K) is varied Method of analysis and design for stability and transient response
AN INTRODUCTION TO THE CONTROL THEORY
 Open-Loop controller An Open-Loop (OL) controller is characterized by no direct connection between the output of the system and its input; therefore external disturbance, non-linear dynamics and parameter
Open-Loop controller An Open-Loop (OL) controller is characterized by no direct connection between the output of the system and its input; therefore external disturbance, non-linear dynamics and parameter
Linear State Feedback Controller Design
 Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
100 (s + 10) (s + 100) e 0.5s. s 100 (s + 10) (s + 100). G(s) =
 (s + 100) e 0.5s. s 100 (s + 10) (s + 100). G(s) =") 1 AME 3315; Spring 215; Midterm 2 Review (not graded) Problems: 9.3 9.8 9.9 9.12 except parts 5 and 6. 9.13 except parts 4 and 5 9.28 9.34 You are given the transfer function: G(s) = 1) Plot the bode plot
1 AME 3315; Spring 215; Midterm 2 Review (not graded) Problems: 9.3 9.8 9.9 9.12 except parts 5 and 6. 9.13 except parts 4 and 5 9.28 9.34 You are given the transfer function: G(s) = 1) Plot the bode plot
EE402 - Discrete Time Systems Spring Lecture 10
 EE402 - Discrete Time Systems Spring 208 Lecturer: Asst. Prof. M. Mert Ankarali Lecture 0.. Root Locus For continuous time systems the root locus diagram illustrates the location of roots/poles of a closed
EE402 - Discrete Time Systems Spring 208 Lecturer: Asst. Prof. M. Mert Ankarali Lecture 0.. Root Locus For continuous time systems the root locus diagram illustrates the location of roots/poles of a closed
Lecture 7:Time Response Pole-Zero Maps Influence of Poles and Zeros Higher Order Systems and Pole Dominance Criterion
 Cleveland State University MCE441: Intr. Linear Control Lecture 7:Time Influence of Poles and Zeros Higher Order and Pole Criterion Prof. Richter 1 / 26 First-Order Specs: Step : Pole Real inputs contain
Cleveland State University MCE441: Intr. Linear Control Lecture 7:Time Influence of Poles and Zeros Higher Order and Pole Criterion Prof. Richter 1 / 26 First-Order Specs: Step : Pole Real inputs contain
Design of a Lead Compensator
 Design of a Lead Compensator Dr. Bishakh Bhattacharya Professor, Department of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD The Lecture Contains Standard Forms of
Design of a Lead Compensator Dr. Bishakh Bhattacharya Professor, Department of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD The Lecture Contains Standard Forms of
Control Systems. EC / EE / IN. For
 Control Systems For EC / EE / IN By www.thegateacademy.com Syllabus Syllabus for Control Systems Basic Control System Components; Block Diagrammatic Description, Reduction of Block Diagrams. Open Loop
Control Systems For EC / EE / IN By www.thegateacademy.com Syllabus Syllabus for Control Systems Basic Control System Components; Block Diagrammatic Description, Reduction of Block Diagrams. Open Loop
MAS107 Control Theory Exam Solutions 2008
 MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
2.010 Fall 2000 Solution of Homework Assignment 8
 2.1 Fall 2 Solution of Homework Assignment 8 1. Root Locus Analysis of Hydraulic Servomechanism. The block diagram of the controlled hydraulic servomechanism is shown in Fig. 1 e r e error + i Σ C(s) P(s)
2.1 Fall 2 Solution of Homework Assignment 8 1. Root Locus Analysis of Hydraulic Servomechanism. The block diagram of the controlled hydraulic servomechanism is shown in Fig. 1 e r e error + i Σ C(s) P(s)
Feedback Control of Linear SISO systems. Process Dynamics and Control
 Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Proportional plus Integral (PI) Controller
 Controller") Proportional plus Integral (PI) Controller 1. A pole is placed at the origin 2. This causes the system type to increase by 1 and as a result the error is reduced to zero. 3. Originally a point A is on
Proportional plus Integral (PI) Controller 1. A pole is placed at the origin 2. This causes the system type to increase by 1 and as a result the error is reduced to zero. 3. Originally a point A is on
Homework 7 - Solutions
 Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
Digital Control Systems
 Digital Control Systems Lecture Summary #4 This summary discussed some graphical methods their use to determine the stability the stability margins of closed loop systems. A. Nyquist criterion Nyquist
Digital Control Systems Lecture Summary #4 This summary discussed some graphical methods their use to determine the stability the stability margins of closed loop systems. A. Nyquist criterion Nyquist
Control Systems I Lecture 10: System Specifications
 Control Systems I Lecture 10: System Specifications Readings: Guzzella, Chapter 10 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 24, 2017 E. Frazzoli (ETH) Lecture
Control Systems I Lecture 10: System Specifications Readings: Guzzella, Chapter 10 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 24, 2017 E. Frazzoli (ETH) Lecture
2.004 Dynamics and Control II Spring 2008
 MT OpenCourseWare http://ocw.mit.edu.004 Dynamics and Control Spring 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts nstitute of Technology
MT OpenCourseWare http://ocw.mit.edu.004 Dynamics and Control Spring 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts nstitute of Technology
EE C128 / ME C134 Fall 2014 HW 6.2 Solutions. HW 6.2 Solutions
 EE C28 / ME C34 Fall 24 HW 6.2 Solutions. PI Controller For the system G = K (s+)(s+3)(s+8) HW 6.2 Solutions in negative feedback operating at a damping ratio of., we are going to design a PI controller
EE C28 / ME C34 Fall 24 HW 6.2 Solutions. PI Controller For the system G = K (s+)(s+3)(s+8) HW 6.2 Solutions in negative feedback operating at a damping ratio of., we are going to design a PI controller
IC6501 CONTROL SYSTEMS
 DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
EE 380 EXAM II 3 November 2011 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO
: First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO") EE 380 EXAM II 3 November 2011 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
EE 380 EXAM II 3 November 2011 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions
 Final Exam (2011) solutions") MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions Question 1. SIGNALS: Design of a noise-cancelling headphone system. 1a. Based on the low-pass filter given, design a high-pass filter,
MAE143a: Signals & Systems (& Control) Final Exam (2011) solutions Question 1. SIGNALS: Design of a noise-cancelling headphone system. 1a. Based on the low-pass filter given, design a high-pass filter,
C(s) R(s) 1 C(s) C(s) C(s) = s - T. Ts + 1 = 1 s - 1. s + (1 T) Taking the inverse Laplace transform of Equation (5 2), we obtain
 R(s) 1 C(s) C(s) C(s) = s - T. Ts + 1 = 1 s - 1. s + (1 T) Taking the inverse Laplace transform of Equation (5 2), we obtain") analyses of the step response, ramp response, and impulse response of the second-order systems are presented. Section 5 4 discusses the transient-response analysis of higherorder systems. Section 5 5 gives
analyses of the step response, ramp response, and impulse response of the second-order systems are presented. Section 5 4 discusses the transient-response analysis of higherorder systems. Section 5 5 gives
CYBER EXPLORATION LABORATORY EXPERIMENTS
 CYBER EXPLORATION LABORATORY EXPERIMENTS 1 2 Cyber Exploration oratory Experiments Chapter 2 Experiment 1 Objectives To learn to use MATLAB to: (1) generate polynomial, (2) manipulate polynomials, (3)
CYBER EXPLORATION LABORATORY EXPERIMENTS 1 2 Cyber Exploration oratory Experiments Chapter 2 Experiment 1 Objectives To learn to use MATLAB to: (1) generate polynomial, (2) manipulate polynomials, (3)
MAE 143B - Homework 8 Solutions
 MAE 43B - Homework 8 Solutions P6.4 b) With this system, the root locus simply starts at the pole and ends at the zero. Sketches by hand and matlab are in Figure. In matlab, use zpk to build the system
MAE 43B - Homework 8 Solutions P6.4 b) With this system, the root locus simply starts at the pole and ends at the zero. Sketches by hand and matlab are in Figure. In matlab, use zpk to build the system
Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam!
 To be returned at the end of the exam!") Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3.. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid -
Prüfung Regelungstechnik I (Control Systems I) Prof. Dr. Lino Guzzella 3.. 24 Übersetzungshilfe / Translation aid (English) To be returned at the end of the exam! Do not mark up this translation aid -
SECTION 8: ROOT-LOCUS ANALYSIS. ESE 499 Feedback Control Systems
 SECTION 8: ROOT-LOCUS ANALYSIS ESE 499 Feedback Control Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed-loop transfer function is KKKK ss TT ss = 1 + KKKK ss HH ss GG ss
SECTION 8: ROOT-LOCUS ANALYSIS ESE 499 Feedback Control Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed-loop transfer function is KKKK ss TT ss = 1 + KKKK ss HH ss GG ss
Root Locus U R K. Root Locus: Find the roots of the closed-loop system for 0 < k < infinity
 Background: Root Locus Routh Criteria tells you the range of gains that result in a stable system. It doesn't tell you how the system will behave, however. That's a problem. For example, for the following
Background: Root Locus Routh Criteria tells you the range of gains that result in a stable system. It doesn't tell you how the system will behave, however. That's a problem. For example, for the following
1 x(k +1)=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =
=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =") 567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
CHAPTER 7 STEADY-STATE RESPONSE ANALYSES
 CHAPTER 7 STEADY-STATE RESPONSE ANALYSES 1. Introduction The steady state error is a measure of system accuracy. These errors arise from the nature of the inputs, system type and from nonlinearities of
CHAPTER 7 STEADY-STATE RESPONSE ANALYSES 1. Introduction The steady state error is a measure of system accuracy. These errors arise from the nature of the inputs, system type and from nonlinearities of
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Guidance and Control Introduction and PID Loops Dr. Kostas Alexis (CSE) Autonomous Robot Challenges How do I control where to go? Autonomous Mobile Robot Design Topic:
Autonomous Mobile Robot Design Topic: Guidance and Control Introduction and PID Loops Dr. Kostas Alexis (CSE) Autonomous Robot Challenges How do I control where to go? Autonomous Mobile Robot Design Topic:
R a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.
 Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.") SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
Chapter 2. Classical Control System Design. Dutch Institute of Systems and Control
 Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Control of Electromechanical Systems
 Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
Due Wednesday, February 6th EE/MFS 599 HW #5
 Due Wednesday, February 6th EE/MFS 599 HW #5 You may use Matlab/Simulink wherever applicable. Consider the standard, unity-feedback closed loop control system shown below where G(s) = /[s q (s+)(s+9)]
Due Wednesday, February 6th EE/MFS 599 HW #5 You may use Matlab/Simulink wherever applicable. Consider the standard, unity-feedback closed loop control system shown below where G(s) = /[s q (s+)(s+9)]
AMME3500: System Dynamics & Control
 Stefan B. Williams May, 211 AMME35: System Dynamics & Control Assignment 4 Note: This assignment contributes 15% towards your final mark. This assignment is due at 4pm on Monday, May 3 th during Week 13
Stefan B. Williams May, 211 AMME35: System Dynamics & Control Assignment 4 Note: This assignment contributes 15% towards your final mark. This assignment is due at 4pm on Monday, May 3 th during Week 13
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Stability Routh-Hurwitz stability criterion Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling
ECE317 : Feedback and Control Lecture : Stability Routh-Hurwitz stability criterion Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling
Power System Operations and Control Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, Kanpur. Module 3 Lecture 8
 Power System Operations and Control Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, Kanpur Module 3 Lecture 8 Welcome to lecture number 8 of module 3. In the previous
Power System Operations and Control Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, Kanpur Module 3 Lecture 8 Welcome to lecture number 8 of module 3. In the previous
Time Response of Systems
 Chapter 0 Time Response of Systems 0. Some Standard Time Responses Let us try to get some impulse time responses just by inspection: Poles F (s) f(t) s-plane Time response p =0 s p =0,p 2 =0 s 2 t p =
Chapter 0 Time Response of Systems 0. Some Standard Time Responses Let us try to get some impulse time responses just by inspection: Poles F (s) f(t) s-plane Time response p =0 s p =0,p 2 =0 s 2 t p =