Introduction to Bayesian Estimation. McGill COMP 765 Sept 12 th, 2017
|
|
|
- Stephanie Warner
- 5 years ago
- Views:
Transcription
1 Inrodcion o Baesian Esimaion McGill COM 765 Sep 2 h 207
2 Where am I? or firs core problem Las class: We can model a robo s moions and he world as spaial qaniies These are no perfec and herefore i is p o algorihms o compensae Toda: Represening moion and sensing probabilisicall Formlaion of localiaion as Baesian inference Describe and anale a firs simple algorihm

3

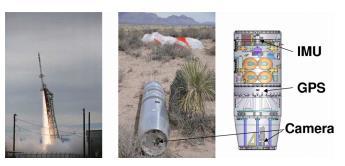
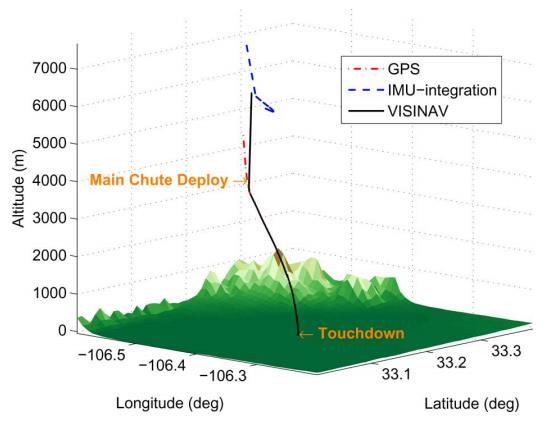
4 Eample: Landing on mars

5 Complemenar inp sorces A GS ells or global posiion wih consan noise +/- 5m: appears as jier arond pah An IMU ell or relaive moion wih nknown aw drif: diverges over ime A good algorihm will fse hese inps inelligenl and recover a pah which bes eplains boh: Smooher han GS Less drif han IMU



6 Eample: Self-driving Sorce: Dave Fergson Solve for X alk Jl 203 hp://


7 Raw Sensor Daa Sonar Laser Measred disances for epeced disance of 300 cm. I is crcial ha we measre he noise well o inegrae. 7
8 robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion = sae esimaion Acion = ili opimiaion 8
9 Discree Random Variables X denoes a random variable. X can ake on a conable nmber of vales in { 2 n }. X= i or i is he probabili ha he random variable X akes on vale i.. is called probabili mass fncion. E.g. Room
10 Coninos Random Variables X akes on vales in he coninm. px= or p is a probabili densi fncion. E.g. r a b p d p b a 0
11 Join and Condiional robabili X= and Y= = If X and Y are independen hen = is he probabili of given = / = If X and Y are independen hen =
12 Law of Toal robabili Marginals Discree case Coninos case p d p p d p p p d 2
13 3 Baes Formla evidence prior likelihood
14 4 Normaliaion a : a a : Algorihm:
15 5 Condiioning Law of oal probabili: d d d
16 Baes Rle wih Backgrond Knowledge 6
17 7 Condiioning Toal probabili: d d d
18 8 Condiional Independence eqivalen o and
19 Simple Eample of Sae Esimaion Sppose a robo obains measremen Wha is open? 9
20 Casal vs. Diagnosic Reasoning open is diagnosic. open is casal. Ofen casal knowledge is easier o obain. Baes rle allows s o se con casal freqencies! knowledge: open open open 20
21 Eample open = 0.6 open = 0.3 open = open = 0.5 open open open open p open open p open open raises he probabili ha he door is open. 2
22 Combining Evidence Sppose or robo obains anoher observaion 2. How can we inegrae his new informaion? More generall how can we esimae... n? 22
23 23 Recrsive Baesian Updaing n n n n n n Assmpion: n is independen of... n- if we know n i i n n n n n n n n
24 24 Eample: Second Measremen 2 open = open = 0.6 open =2/ open open open open open open open 2 lowers he probabili ha he door is open.
25 A Tpical ifall Two possible locaions and 2 = =0.09 =0.07 Inegrae same repeaedl Wha are we doing wrong? p d p2 d p d Nmber of inegraions 25
26 Acions Ofen he world is dnamic since acions carried o b he robo acions carried o b oher agens or js he ime passing b change he world. How can we incorporae sch acions? 26
27 Tpical Acions The robo rns is wheels o move The robo ses is maniplaor o grasp an objec lans grow over ime Acions are never carried o wih absole cerain. In conras o measremens acions generall increase he ncerain. 27
28 Modeling Acions To incorporae he ocome of an acion ino he crren belief we se he condiional pdf This erm specifies he pdf ha eecing changes he sae from o. 28
29 Eample: Closing he door 29
30 Sae Transiions for = close door : open closed 0 If he door is open he acion close door scceeds in 90% of all cases. 30
31 Inegraing he Ocome of Acions Coninos case: ' ' d' Discree case: ' ' 3
32 32 Eample: The Resling Belief ' ' ' ' closed closed closed open open open open open open closed closed closed open open closed closed closed
33 Baes Filers: Framework Given: Sream of observaions and acion daa : Sensor model. Acion model. rior probabili of he ssem sae. d { Waned: Esimae of he sae X of a dnamical ssem. The poserior of he sae is also called Belief: Bel } 33
34 Markov Assmpion p 0 : : : p p : : : p Underling Assmpions Saic world Independen noise erfec model no approimaion errors 34
35 d Bel Baes Filers Baes = observaion = acion = sae Bel Markov Markov d d Toal prob. Markov d
36 Bel Bel d Baes Filer Algorihm. Algorihm Baes_filer Beld : If d is a percepal daa iem hen 4. For all do For all do Else if d is an acion daa iem hen 0. For all do. 2. Rern Bel Bel ' Bel Bel' Bel ' Bel ' Bel ' ' Bel ' d' 36
37 We have he mah wha s lef? Choose a daa srcre o represen Bel Creae pdae rles ha inegrae he moions and measremens Feed in daa and o come or resls For he res of his secion we will consider a hge varie of mehods ha roghl fall wihin his framework. Firs eamples: Fied-resolion discreiaion of Bel : Markov Localiaion Variable-resolion discreiaion of Bel : aricle Filers Resricion of Bel o a simple parameric famil : Kalman Filers
38 Discree Baes Filer Algorihm. Algorihm Discree_Baes_filer Beld : If d is a percepal daa iem hen 4. For all do For all do Else if d is an acion daa iem hen 0. For all do. 2. Rern Bel Bel ' Bel Bel' Bel ' ' Bel ' Bel ' ' Bel '

39 iecewise Consan Bel
40 iecewise Consan Wha abo Angle? Bel
41 Implemenaion To pdae he belief pon sensor inp and o carr o he normaliaion one has o ierae over all cells of he grid. Especiall when he belief is peaked which is generall he case dring posiion racking one wans o avoid pdaing irrelevan aspecs of he sae space. One approach is no o pdae enire sb-spaces of he sae space. This however reqires o monior wheher he robo is delocalied or no. To achieve his one can consider he likelihood of he observaions given he acive componens of he sae space.
42 Implemenaion 2 To efficienl pdae he belief pon robo moions one picall assmes a bonded Gassian model for he moion ncerain. This redces he pdae cos from On 2 o On where n is he nmber of saes. The pdae can also be realied b shifing he daa in he grid according o he measred moion. In a second sep he grid is hen convolved sing a separable Gassian Kernel. Two-dimensional eample: /6 /8 /6 /4 /8 /4 /8 /2 + /4 /2 /4 /6 /8 /6 /4 Fewer arihmeic operaions Easier o implemen
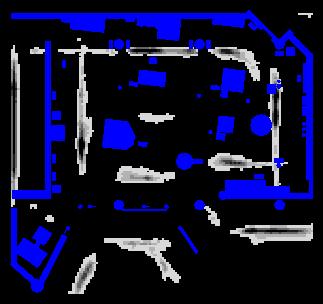
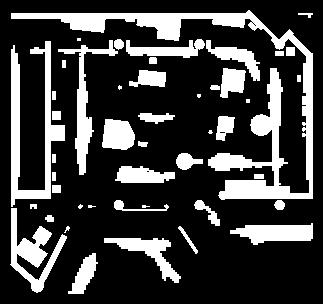



43 Grid-based Localiaion 43


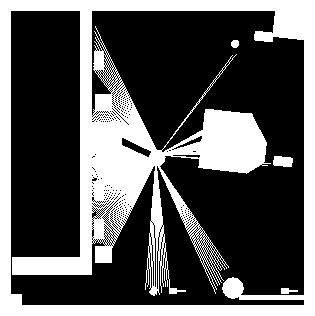
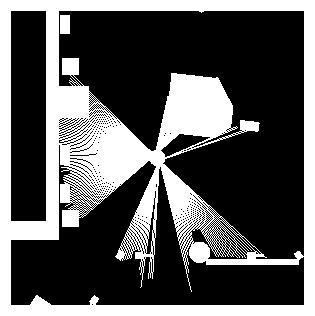
44 Sonars and Occpanc Grid Map 44
45 Conclsion: Baesian esimaion gives a framework o inegrae evidence assming onl local knowledge. The mah ells s he correc operaions o fse he knowledge properl represening he poserior disribion Discree Baes Filers are never sed: we ms hink of smarer was o represen or disribions and o compe pdaes ne ime!
Probabilistic Robotics Sebastian Thrun-- Stanford
 robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
Localization and Map Making
 Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
Uncertainty & Localization I
 Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Anno accademico 2006/2007. Davide Migliore
 Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Recursive Bayes Filtering Advanced AI
 Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
AUTONOMOUS SYSTEMS. Probabilistic Robotics Basics Kalman Filters Particle Filters. Sebastian Thrun
 AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Data Fusion using Kalman Filter. Ioannis Rekleitis
 Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Two Popular Bayesian Estimators: Particle and Kalman Filters. McGill COMP 765 Sept 14 th, 2017
 Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
4.2 Continuous-Time Systems and Processes Problem Definition Let the state variable representation of a linear system be
 4 COVARIANCE ROAGAION 41 Inrodcion Now ha we have compleed or review of linear sysems and random processes, we wan o eamine he performance of linear sysems ecied by random processes he sandard approach
4 COVARIANCE ROAGAION 41 Inrodcion Now ha we have compleed or review of linear sysems and random processes, we wan o eamine he performance of linear sysems ecied by random processes he sandard approach
CSE-571 Robotics. Sample-based Localization (sonar) Motivation. Bayes Filter Implementations. Particle filters. Density Approximation
 Motivation. Bayes Filter Implementations. Particle filters. Density Approximation") Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Probabilistic Robotics
 Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
CS 4495 Computer Vision Tracking 1- Kalman,Gaussian
 CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
CSE-473. A Gentle Introduction to Particle Filters
 CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
The Research of Active Disturbance Rejection Control on Shunt Hybrid Active Power Filter
 Available online a www.sciencedirec.com Procedia Engineering 29 (2) 456 46 2 Inernaional Workshop on Informaion and Elecronics Engineering (IWIEE) The Research of Acive Disrbance Rejecion Conrol on Shn
Available online a www.sciencedirec.com Procedia Engineering 29 (2) 456 46 2 Inernaional Workshop on Informaion and Elecronics Engineering (IWIEE) The Research of Acive Disrbance Rejecion Conrol on Shn
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
SEIF, EnKF, EKF SLAM. Pieter Abbeel UC Berkeley EECS
 SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
Introduction to Mobile Robotics
 Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
3.1.3 INTRODUCTION TO DYNAMIC OPTIMIZATION: DISCRETE TIME PROBLEMS. A. The Hamiltonian and First-Order Conditions in a Finite Time Horizon
 3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
מקורות לחומר בשיעור ספר הלימוד: Forsyth & Ponce מאמרים שונים חומר באינטרנט! פרק פרק 18
 עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
Sequential Importance Resampling (SIR) Particle Filter
 Particle Filter") Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
7630 Autonomous Robotics Probabilistic Localisation
 7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
Robot Motion Model EKF based Localization EKF SLAM Graph SLAM
 Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Announcements. Recap: Filtering. Recap: Reasoning Over Time. Example: State Representations for Robot Localization. Particle Filtering
 Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Using the Kalman filter Extended Kalman filter
 Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
I Let E(v! v 0 ) denote the event that v 0 is selected instead of v I The block error probability is the union of such events
 denote the event that v 0 is selected instead of v I The block error probability is the union of such events") ED042 Error Conrol Coding Kodningseknik) Chaper 3: Opimal Decoding Mehods, Par ML Decoding Error Proailiy Sepemer 23, 203 ED042 Error Conrol Coding: Chaper 3 20 / 35 Pairwise Error Proailiy Assme ha v
ED042 Error Conrol Coding Kodningseknik) Chaper 3: Opimal Decoding Mehods, Par ML Decoding Error Proailiy Sepemer 23, 203 ED042 Error Conrol Coding: Chaper 3 20 / 35 Pairwise Error Proailiy Assme ha v
Object Tracking. Computer Vision Jia-Bin Huang, Virginia Tech. Many slides from D. Hoiem
 Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
State-Space Models. Initialization, Estimation and Smoothing of the Kalman Filter
 Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Advanced Control Systems Problem Sheet for Part B: Multivariable Systems
 436-45 Advanced Conrol Ssems Problem Shee for Par B: Mlivariable Ssems Qesion B 998 Given a lan o be conrolled, which is described b a sae-sace model A B C Oline he rocess b which o wold design a discree
436-45 Advanced Conrol Ssems Problem Shee for Par B: Mlivariable Ssems Qesion B 998 Given a lan o be conrolled, which is described b a sae-sace model A B C Oline he rocess b which o wold design a discree
HYPOTHESIS TESTING. four steps. 1. State the hypothesis and the criterion. 2. Compute the test statistic. 3. Compute the p-value. 4.
 Inrodcion o Saisics in Psychology PSY Professor Greg Francis Lecre 24 Hypohesis esing for correlaions Is here a correlaion beween homework and exam grades? for seps. Sae he hypohesis and he crierion 2.
Inrodcion o Saisics in Psychology PSY Professor Greg Francis Lecre 24 Hypohesis esing for correlaions Is here a correlaion beween homework and exam grades? for seps. Sae he hypohesis and he crierion 2.
2016 Possible Examination Questions. Robotics CSCE 574
 206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
Experiments on Individual Classifiers and on Fusion of a Set of Classifiers
 Experimens on Individal Classifiers and on Fsion of a Se of Classifiers Clade Tremblay, 2 Cenre de Recherches Mahémaiqes Universié de Monréal CP 628 Scc Cenre-Ville, Monréal, QC, H3C 3J7, CANADA claderemblay@monrealca
Experimens on Individal Classifiers and on Fsion of a Se of Classifiers Clade Tremblay, 2 Cenre de Recherches Mahémaiqes Universié de Monréal CP 628 Scc Cenre-Ville, Monréal, QC, H3C 3J7, CANADA claderemblay@monrealca
Localization. Mobile robot localization is the problem of determining the pose of a robot relative to a given map of the environment.
 Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Scalar Conservation Laws
 MATH-459 Nmerical Mehods for Conservaion Laws by Prof. Jan S. Heshaven Solion se : Scalar Conservaion Laws Eercise. The inegral form of he scalar conservaion law + f ) = is given in Eq. below. ˆ 2, 2 )
MATH-459 Nmerical Mehods for Conservaion Laws by Prof. Jan S. Heshaven Solion se : Scalar Conservaion Laws Eercise. The inegral form of he scalar conservaion law + f ) = is given in Eq. below. ˆ 2, 2 )
Applications in Industry (Extended) Kalman Filter. Week Date Lecture Title
 Kalman Filter. Week Date Lecture Title") hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
HYPOTHESIS TESTING. four steps. 1. State the hypothesis. 2. Set the criterion for rejecting. 3. Compute the test statistics. 4. Interpret the results.
 Inrodcion o Saisics in Psychology PSY Professor Greg Francis Lecre 23 Hypohesis esing for correlaions Is here a correlaion beween homework and exam grades? for seps. Sae he hypohesis. 2. Se he crierion
Inrodcion o Saisics in Psychology PSY Professor Greg Francis Lecre 23 Hypohesis esing for correlaions Is here a correlaion beween homework and exam grades? for seps. Sae he hypohesis. 2. Se he crierion
Mat 267 Engineering Calculus III Updated on 04/30/ x 4y 4z 8x 16y / 4 0. x y z x y. 4x 4y 4z 24x 16y 8z.
 Ma 67 Engineering Calcls III Updaed on 04/0/0 r. Firoz Tes solion:. a) Find he cener and radis of he sphere 4 4 4z 8 6 0 z ( ) ( ) z / 4 The cener is a (, -, 0), and radis b) Find he cener and radis of
Ma 67 Engineering Calcls III Updaed on 04/0/0 r. Firoz Tes solion:. a) Find he cener and radis of he sphere 4 4 4z 8 6 0 z ( ) ( ) z / 4 The cener is a (, -, 0), and radis b) Find he cener and radis of
Object tracking: Using HMMs to estimate the geographical location of fish
 Objec racking: Using HMMs o esimae he geographical locaion of fish 02433 - Hidden Markov Models Marin Wæver Pedersen, Henrik Madsen Course week 13 MWP, compiled June 8, 2011 Objecive: Locae fish from agging
Objec racking: Using HMMs o esimae he geographical locaion of fish 02433 - Hidden Markov Models Marin Wæver Pedersen, Henrik Madsen Course week 13 MWP, compiled June 8, 2011 Objecive: Locae fish from agging
Miscellanea Miscellanea
 Miscellanea Miscellanea Miscellanea Miscellanea Miscellanea CENRAL EUROPEAN REVIEW OF ECONOMICS & FINANCE Vol., No. (4) pp. -6 bigniew Śleszński USING BORDERED MARICES FOR DURBIN WASON D SAISIC EVALUAION
Miscellanea Miscellanea Miscellanea Miscellanea Miscellanea CENRAL EUROPEAN REVIEW OF ECONOMICS & FINANCE Vol., No. (4) pp. -6 bigniew Śleszński USING BORDERED MARICES FOR DURBIN WASON D SAISIC EVALUAION
STA 114: Statistics. Notes 2. Statistical Models and the Likelihood Function
 STA 114: Saisics Noes 2. Saisical Models and he Likelihood Funcion Describing Daa & Saisical Models A physicis has a heory ha makes a precise predicion of wha s o be observed in daa. If he daa doesn mach
STA 114: Saisics Noes 2. Saisical Models and he Likelihood Funcion Describing Daa & Saisical Models A physicis has a heory ha makes a precise predicion of wha s o be observed in daa. If he daa doesn mach
A Simulative Study on Active Disturbance Rejection Control (ADRC) as a Control Tool for Practitioners
 as a Control Tool for Practitioners") Elecronics 3,, 46-79; doi:.339/elecronics346 Aricle OPEN ACCESS elecronics ISSN 79-99 www.mdpi.com/jornal/elecronics A Simlaive Sd on Acive Disrbance Rejecion Conrol (ADRC) as a Conrol Tool for Praciioners
Elecronics 3,, 46-79; doi:.339/elecronics346 Aricle OPEN ACCESS elecronics ISSN 79-99 www.mdpi.com/jornal/elecronics A Simlaive Sd on Acive Disrbance Rejecion Conrol (ADRC) as a Conrol Tool for Praciioners
Temporal probability models
 Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Fundamental Problems In Robotics
 Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Estimation of Poses with Particle Filters
 Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Temporal probability models. Chapter 15, Sections 1 5 1
 Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Kalman filtering for maximum likelihood estimation given corrupted observations.
 alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
Hidden Markov Models
 Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
first-order circuit Complete response can be regarded as the superposition of zero-input response and zero-state response.
 Experimen 4:he Sdies of ransiional processes of 1. Prpose firs-order circi a) Use he oscilloscope o observe he ransiional processes of firs-order circi. b) Use he oscilloscope o measre he ime consan of
Experimen 4:he Sdies of ransiional processes of 1. Prpose firs-order circi a) Use he oscilloscope o observe he ransiional processes of firs-order circi. b) Use he oscilloscope o measre he ime consan of
Introduction to Mobile Robotics Summary
 Inroducion o Mobile Roboics Summary Wolfram Burgard Cyrill Sachniss Maren Bennewiz Diego Tipaldi Luciano Spinello Probabilisic Roboics 2 Probabilisic Roboics Key idea: Eplici represenaion of uncerainy
Inroducion o Mobile Roboics Summary Wolfram Burgard Cyrill Sachniss Maren Bennewiz Diego Tipaldi Luciano Spinello Probabilisic Roboics 2 Probabilisic Roboics Key idea: Eplici represenaion of uncerainy
From Particles to Rigid Bodies
 Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
Ground Rules. PC1221 Fundamentals of Physics I. Kinematics. Position. Lectures 3 and 4 Motion in One Dimension. A/Prof Tay Seng Chuan
 Ground Rules PC11 Fundamenals of Physics I Lecures 3 and 4 Moion in One Dimension A/Prof Tay Seng Chuan 1 Swich off your handphone and pager Swich off your lapop compuer and keep i No alking while lecure
Ground Rules PC11 Fundamenals of Physics I Lecures 3 and 4 Moion in One Dimension A/Prof Tay Seng Chuan 1 Swich off your handphone and pager Swich off your lapop compuer and keep i No alking while lecure
Simultaneous Localisation and Mapping. IAR Lecture 10 Barbara Webb
 Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
DISPLACEMENT ESTIMATION FOR IMAGE PREDICTIVE CODING AND FRAME MOTION-ADAPTIVE INTERPOLATION
 DSPLACEMENT ESTMATON FOR MAGE PREDCTVE CODNG AND FRAME MOTON-ADAPTVE NTERPOLATON Georges TZRTAS Laboraoire des Signa e Ssèmes (C.N.R.S.), Ecole Spériere d'elecricié, Plaea d Molon 9119 GF-sr-YVETTE, FRANCE
DSPLACEMENT ESTMATON FOR MAGE PREDCTVE CODNG AND FRAME MOTON-ADAPTVE NTERPOLATON Georges TZRTAS Laboraoire des Signa e Ssèmes (C.N.R.S.), Ecole Spériere d'elecricié, Plaea d Molon 9119 GF-sr-YVETTE, FRANCE
4.5 Constant Acceleration
 4.5 Consan Acceleraion v() v() = v 0 + a a() a a() = a v 0 Area = a (a) (b) Figure 4.8 Consan acceleraion: (a) velociy, (b) acceleraion When he x -componen of he velociy is a linear funcion (Figure 4.8(a)),
4.5 Consan Acceleraion v() v() = v 0 + a a() a a() = a v 0 Area = a (a) (b) Figure 4.8 Consan acceleraion: (a) velociy, (b) acceleraion When he x -componen of he velociy is a linear funcion (Figure 4.8(a)),
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Math Wednesday March 3, , 4.3: First order systems of Differential Equations Why you should expect existence and uniqueness for the IVP
 Mah 2280 Wednesda March 3, 200 4., 4.3: Firs order ssems of Differenial Equaions Wh ou should epec eisence and uniqueness for he IVP Eample: Consider he iniial value problem relaed o page 4 of his eserda
Mah 2280 Wednesda March 3, 200 4., 4.3: Firs order ssems of Differenial Equaions Wh ou should epec eisence and uniqueness for he IVP Eample: Consider he iniial value problem relaed o page 4 of his eserda
DESIGN OF TENSION MEMBERS
 CHAPTER Srcral Seel Design LRFD Mehod DESIGN OF TENSION MEMBERS Third Ediion A. J. Clark School of Engineering Deparmen of Civil and Environmenal Engineering Par II Srcral Seel Design and Analysis 4 FALL
CHAPTER Srcral Seel Design LRFD Mehod DESIGN OF TENSION MEMBERS Third Ediion A. J. Clark School of Engineering Deparmen of Civil and Environmenal Engineering Par II Srcral Seel Design and Analysis 4 FALL
Localization. MEM456/800 Localization: Bayes Filter. Week 4 Ani Hsieh
 Localiaio MEM456/800 Localiaio: Baes Filer Where am I? Week 4 i Hsieh Evirome Sesors cuaors Sofware Ucerai is Everwhere Level of ucerai deeds o he alicaio How do we hadle ucerai? Eamle roblem Esimaig a
Localiaio MEM456/800 Localiaio: Baes Filer Where am I? Week 4 i Hsieh Evirome Sesors cuaors Sofware Ucerai is Everwhere Level of ucerai deeds o he alicaio How do we hadle ucerai? Eamle roblem Esimaig a
The Arcsine Distribution
 The Arcsine Disribuion Chris H. Rycrof Ocober 6, 006 A common heme of he class has been ha he saisics of single walker are ofen very differen from hose of an ensemble of walkers. On he firs homework, we
The Arcsine Disribuion Chris H. Rycrof Ocober 6, 006 A common heme of he class has been ha he saisics of single walker are ofen very differen from hose of an ensemble of walkers. On he firs homework, we
The fundamental mass balance equation is ( 1 ) where: I = inputs P = production O = outputs L = losses A = accumulation
 where: I = inputs P = production O = outputs L = losses A = accumulation") Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Chapter 2. Models, Censoring, and Likelihood for Failure-Time Data
 Chaper 2 Models, Censoring, and Likelihood for Failure-Time Daa William Q. Meeker and Luis A. Escobar Iowa Sae Universiy and Louisiana Sae Universiy Copyrigh 1998-2008 W. Q. Meeker and L. A. Escobar. Based
Chaper 2 Models, Censoring, and Likelihood for Failure-Time Daa William Q. Meeker and Luis A. Escobar Iowa Sae Universiy and Louisiana Sae Universiy Copyrigh 1998-2008 W. Q. Meeker and L. A. Escobar. Based
m = 41 members n = 27 (nonfounders), f = 14 (founders) 8 markers from chromosome 19
, f = 14 (founders) 8 markers from chromosome 19") Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Lecture 8 Backlash and Quantization. Material. Linear and Angular Backlash. Example: Parallel Kinematic Robot. Backlash.
 Lecre 8 Backlash and Qanizaion Maerial Toda s Goal: To know models and compensaion mehods for backlash Lecre slides Be able o analze he effec of qanizaion errors Noe: We are sing analsis mehods from previos
Lecre 8 Backlash and Qanizaion Maerial Toda s Goal: To know models and compensaion mehods for backlash Lecre slides Be able o analze he effec of qanizaion errors Noe: We are sing analsis mehods from previos
Space truss bridge optimization by dynamic programming and linear programming
 306 IABSE-JSCE Join Conference on Advances in Bridge Engineering-III, Ags 1-, 015, Dhaka, Bangladesh. ISBN: 978-984-33-9313-5 Amin, Oki, Bhiyan, Ueda (eds.) www.iabse-bd.org Space rss bridge opimizaion
306 IABSE-JSCE Join Conference on Advances in Bridge Engineering-III, Ags 1-, 015, Dhaka, Bangladesh. ISBN: 978-984-33-9313-5 Amin, Oki, Bhiyan, Ueda (eds.) www.iabse-bd.org Space rss bridge opimizaion
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
A Bayesian Approach to Spectral Analysis
 Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
An EM algorithm for maximum likelihood estimation given corrupted observations. E. E. Holmes, National Marine Fisheries Service
 An M algorihm maimum likelihood esimaion given corruped observaions... Holmes Naional Marine Fisheries Service Inroducion M algorihms e likelihood esimaion o cases wih hidden saes such as when observaions
An M algorihm maimum likelihood esimaion given corruped observaions... Holmes Naional Marine Fisheries Service Inroducion M algorihms e likelihood esimaion o cases wih hidden saes such as when observaions
PH2130 Mathematical Methods Lab 3. z x
 PH130 Mahemaical Mehods Lab 3 This scrip shold keep yo bsy for he ne wo weeks. Yo shold aim o creae a idy and well-srcred Mahemaica Noebook. Do inclde plenifl annoaions o show ha yo know wha yo are doing,
PH130 Mahemaical Mehods Lab 3 This scrip shold keep yo bsy for he ne wo weeks. Yo shold aim o creae a idy and well-srcred Mahemaica Noebook. Do inclde plenifl annoaions o show ha yo know wha yo are doing,
Kinematics Vocabulary. Kinematics and One Dimensional Motion. Position. Coordinate System in One Dimension. Kinema means movement 8.
 Kinemaics Vocabulary Kinemaics and One Dimensional Moion 8.1 WD1 Kinema means movemen Mahemaical descripion of moion Posiion Time Inerval Displacemen Velociy; absolue value: speed Acceleraion Averages
Kinemaics Vocabulary Kinemaics and One Dimensional Moion 8.1 WD1 Kinema means movemen Mahemaical descripion of moion Posiion Time Inerval Displacemen Velociy; absolue value: speed Acceleraion Averages
Computer Vision. Motion Extraction
 Comuer Moion Eracion Comuer Alicaions of moion eracion Change / sho cu deecion Surveillance / raffic monioring Moion caure / gesure analsis HC image sabilisaion Moion comensaion e.g. medical roboics Feaure
Comuer Moion Eracion Comuer Alicaions of moion eracion Change / sho cu deecion Surveillance / raffic monioring Moion caure / gesure analsis HC image sabilisaion Moion comensaion e.g. medical roboics Feaure
Augmented Reality II - Kalman Filters - Gudrun Klinker May 25, 2004
 Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Lecture 2-1 Kinematics in One Dimension Displacement, Velocity and Acceleration Everything in the world is moving. Nothing stays still.
 Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Algorithms for Sensor-Based Robotics: Kalman Filters for Mapping and Localization
 Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Kriging Models Predicting Atrazine Concentrations in Surface Water Draining Agricultural Watersheds
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
Mapping in Dynamic Environments
 Mapping in Dynaic Environens Wolfra Burgard Universiy of Freiburg, Gerany Mapping is a Key Technology for Mobile Robos Robos can robusly navigae when hey have a ap. Robos have been shown o being able o
Mapping in Dynaic Environens Wolfra Burgard Universiy of Freiburg, Gerany Mapping is a Key Technology for Mobile Robos Robos can robusly navigae when hey have a ap. Robos have been shown o being able o
International Journal "Information Theories & Applications" Vol.10
 44 Inernaional Jornal "Informaion eories & Applicaions" Vol. [7] R.A.Jonson (994 iller & Frend s Probabili and Saisics for Engineers5 ediion Prenice Hall New Jerse 763. [8] J.Carroll ( Hman - Comper Ineracion
44 Inernaional Jornal "Informaion eories & Applicaions" Vol. [7] R.A.Jonson (994 iller & Frend s Probabili and Saisics for Engineers5 ediion Prenice Hall New Jerse 763. [8] J.Carroll ( Hman - Comper Ineracion
KINEMATICS IN ONE DIMENSION
 KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
(π 3)k. f(t) = 1 π 3 sin(t)
k. f(t) = 1 π 3 sin(t)") Mah 6 Fall 6 Dr. Lil Yen Tes Show all our work Name: Score: /6 No Calculaor permied in his par. Read he quesions carefull. Show all our work and clearl indicae our final answer. Use proper noaion. Problem
Mah 6 Fall 6 Dr. Lil Yen Tes Show all our work Name: Score: /6 No Calculaor permied in his par. Read he quesions carefull. Show all our work and clearl indicae our final answer. Use proper noaion. Problem
Modal identification of structures from roving input data by means of maximum likelihood estimation of the state space model
 Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Block Diagram of a DCS in 411
 Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Speech and Language Processing
 Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Linear Time-invariant systems, Convolution, and Cross-correlation
 Linear Time-invarian sysems, Convoluion, and Cross-correlaion (1) Linear Time-invarian (LTI) sysem A sysem akes in an inpu funcion and reurns an oupu funcion. x() T y() Inpu Sysem Oupu y() = T[x()] An
Linear Time-invarian sysems, Convoluion, and Cross-correlaion (1) Linear Time-invarian (LTI) sysem A sysem akes in an inpu funcion and reurns an oupu funcion. x() T y() Inpu Sysem Oupu y() = T[x()] An
2.160 System Identification, Estimation, and Learning. Lecture Notes No. 8. March 6, 2006
 2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
Inventory Analysis and Management. Multi-Period Stochastic Models: Optimality of (s, S) Policy for K-Convex Objective Functions
 Policy for K-Convex Objective Functions") Muli-Period Sochasic Models: Opimali of (s, S) Polic for -Convex Objecive Funcions Consider a seing similar o he N-sage newsvendor problem excep ha now here is a fixed re-ordering cos (> 0) for each (re-)order.
Muli-Period Sochasic Models: Opimali of (s, S) Polic for -Convex Objecive Funcions Consider a seing similar o he N-sage newsvendor problem excep ha now here is a fixed re-ordering cos (> 0) for each (re-)order.
Computer Vision 2 Lecture 6
 Compuer Vision 2 Lecure 6 Beond Kalman Filers (09.05.206) leibe@vision.rwh-aachen.de, sueckler@vision.rwh-aachen.de RWTH Aachen Universi, Compuer Vision Group hp://www.vision.rwh-aachen.de Conen of he
Compuer Vision 2 Lecure 6 Beond Kalman Filers (09.05.206) leibe@vision.rwh-aachen.de, sueckler@vision.rwh-aachen.de RWTH Aachen Universi, Compuer Vision Group hp://www.vision.rwh-aachen.de Conen of he
Advanced Organic Chemistry
 Lalic, G. Chem 53A Chemisry 53A Advanced Organic Chemisry Lecure noes 1 Kineics: A racical Approach Simple Kineics Scenarios Fiing Experimenal Daa Using Kineics o Deermine he Mechanism Doughery, D. A.,
Lalic, G. Chem 53A Chemisry 53A Advanced Organic Chemisry Lecure noes 1 Kineics: A racical Approach Simple Kineics Scenarios Fiing Experimenal Daa Using Kineics o Deermine he Mechanism Doughery, D. A.,
CH.7. PLANE LINEAR ELASTICITY. Continuum Mechanics Course (MMC) - ETSECCPB - UPC
 - ETSECCPB - UPC") CH.7. PLANE LINEAR ELASTICITY Coninuum Mechanics Course (MMC) - ETSECCPB - UPC Overview Plane Linear Elasici Theor Plane Sress Simplifing Hpohesis Srain Field Consiuive Equaion Displacemen Field The Linear
CH.7. PLANE LINEAR ELASTICITY Coninuum Mechanics Course (MMC) - ETSECCPB - UPC Overview Plane Linear Elasici Theor Plane Sress Simplifing Hpohesis Srain Field Consiuive Equaion Displacemen Field The Linear
Review - Quiz # 1. 1 g(y) dy = f(x) dx. y x. = u, so that y = xu and dy. dx (Sometimes you may want to use the substitution x y
 dy = f(x) dx. y x. = u, so that y = xu and dy. dx (Sometimes you may want to use the substitution x y") Review - Quiz # 1 (1) Solving Special Tpes of Firs Order Equaions I. Separable Equaions (SE). d = f() g() Mehod of Soluion : 1 g() d = f() (The soluions ma be given implicil b he above formula. Remember,
Review - Quiz # 1 (1) Solving Special Tpes of Firs Order Equaions I. Separable Equaions (SE). d = f() g() Mehod of Soluion : 1 g() d = f() (The soluions ma be given implicil b he above formula. Remember,
EKF SLAM vs. FastSLAM A Comparison
 vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
References are appeared in the last slide. Last update: (1393/08/19)
") SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
Diebold, Chapter 7. Francis X. Diebold, Elements of Forecasting, 4th Edition (Mason, Ohio: Cengage Learning, 2006). Chapter 7. Characterizing Cycles
. Chapter 7. Characterizing Cycles") Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
15. Vector Valued Functions
 1. Vecor Valued Funcions Up o his poin, we have presened vecors wih consan componens, for example, 1, and,,4. However, we can allow he componens of a vecor o be funcions of a common variable. For example,
1. Vecor Valued Funcions Up o his poin, we have presened vecors wih consan componens, for example, 1, and,,4. However, we can allow he componens of a vecor o be funcions of a common variable. For example,
Overview. COMP14112: Artificial Intelligence Fundamentals. Lecture 0 Very Brief Overview. Structure of this course
 OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
Georey E. Hinton. University oftoronto. Technical Report CRG-TR February 22, Abstract
 Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Applied Mathematics Letters. Oscillation results for fourth-order nonlinear dynamic equations
 Applied Mahemaics Leers 5 (0) 058 065 Conens liss available a SciVerse ScienceDirec Applied Mahemaics Leers jornal homepage: www.elsevier.com/locae/aml Oscillaion resls for forh-order nonlinear dynamic
Applied Mahemaics Leers 5 (0) 058 065 Conens liss available a SciVerse ScienceDirec Applied Mahemaics Leers jornal homepage: www.elsevier.com/locae/aml Oscillaion resls for forh-order nonlinear dynamic