Modal identification of structures from roving input data by means of maximum likelihood estimation of the state space model
|
|
|
- Baldric Holt
- 5 years ago
- Views:
Transcription
1 Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix acceleromeers o he srucure, hen apply a known inpu and record he response of he srucure. An ineresing varian consiss of subsequenly repeaing he es bu wih he inpu force applied o differen poins, roving he inpu from es o es bu no he sensors. In a second phase, individual frequency response funcions are combined in a single frequency response funcion which akes ino accoun all he informaion. The advanage of his procedure is double: firs, he mode shapes can be esimaed a all poins where inpus are applied (using he dynamic reciprociy heorem); and second, he measured forces allow o scale he mode shapes o uni modal mass. This problem is solved in echnical lieraure in he frequency domain. In his work we propose a sae space model ha can be used o solve he problem in he ime domain. We also propose a maximum likelihood algorihm o esimae such a model. 1 Inroducion A roving sensor modal es consiss on esimaing he modal parameers using he daa recorded in differen ess changing he posiion of he sensors from one es o he following: some sensors say a he same posiion from es o es, and oher sensors change he posiion unil all he esed poins are covered. The known inpu, if applied, mus be applied a he same poin in all he es seups. This echnique has reached grea populariy in he civil engineering field because of he size of he civil srucures and because he ess can be performed in operaional condiions. The modal parameers can be exraced in he frequency domain (for example, using he Frequency Domain Decomposiion mehod) and in he ime domain (for example, wih he sae space model). Anoher way o run he es is o place sensors a fixed locaions and change he loading poin from one es o he nex covering all he desired poins (roving exciaion modal es). This echnique is quie popular in experimenal modal analysis wih impac exciaions (hammer) for several reasons: srucures are usually small and roving he sensors can affec o he modal parameers; i is easier o change he posiion of he hammer impac han roving he sensors; i is a less expensive approach seen from a hardware poin of view. The modal parameers are exraced in he bibliography using he dynamic reciprociy heorem (or Bei- Rayleigh heorem) in he frequency domain [1]. However, here are no examples in he ime domain. The purpose of his work is o propose a mehod o esimae he modal parameers in he ime domain: firs, we presen a sae space model o deal wih daa recorded in a roving exciaion es; and second, we propose a maximum likelihood algorihm o esimae ha model (he Expecaion-Maximizaion algorihm). The performance of he proposed mehod is analyzed using a simulaed srucure and also using vibraion daa recorded in a real srucure.
2 2 Sae space model for roving inpu daa and is esimaion using maximum likelihood 2.1 Sae space model for roving inpu daa Le be a linear, ime invarian mechanical/srucural sysem. Le us consider n r sample records wih measuremens each, Y = {y 1, y 2,..., y }, r = 1, 2,..., n r (1) U = {u 1, u 2,..., u }, r = 1, 2,..., n r (2) where y R no is he measured oupu vecor for record r, and u R n i is he measured inpu vecor for record r. Assume he inpus vary from record o record (poin of applicaion, number of inpus,... ) bu he oupu sensors remain fixed. The sae space model we propose o use for hese daa is x +1 = Ax + B u + w, w (, Q) (3) y = Cx + D u + v, v (, R) (4) where denoes he ime insan, of a oal number, measured wih consan sampling ime ; x R ns is he sae vecor for record r; n o, n i and n s are he number of oupus, inpus and he size of he sae vecor, respecively; A R ns ns is he ransiion sae marix describing he dynamics of he sysem; B R ns n ir is he inpu marix (n ir is he number of inpus a record r); C R no ns is he oupu marix, which is describing how he inernal sae is ransferred o he he oupu measuremens y ; D R no n ir is he direc ransmission marix. The noise vecors comprise unmeasurable signals: w R ns is he process noise due o disurbances and modelling discrepancies, while v R no is he measuremen noise due o sensor inaccuracy. Boh are assumed o be zero-mean, whie noise sequences wih covariance marices Q and R, respecively. I is imporan o noe ha marix A is invarian because he sysem is ime invarian (i is he same from record o record), and marix C is also invarian because he sensors locaion do no change. On he oher hand, B and D are record-depending because he sysem inpu are differen from record o record. A more pracical way of wriing his model is x +1 = Ax + BL u + w, w (, Q) (5) y = Cx + DL u + v, v (, R) (6) where L R ns n ir is a selecion marix formed by ones and zeros verifying B = L B and D = L D. For example, consider a sysem wih n s = 4, n i = 3 and n o = 1. We can wrie b 11 b 12 b 13 Bu = b 21 b 22 b 23 b 31 b 32 b 33 b 41 b 42 b 43 u 1, u 2, u 3, If we measure now only he inpu u 1, we can wrie b 11, Du = [ ] d 11 d 12 d 13 B (1) u 1, = b 21 b 31 u 1,, D (1) u 1, = d 11 u 1,. b 41 u 1, u 2, u 3,.
3 Using he selecion marices: b 11 b 11 b 12 b 13 B (1) u 1, = b 21 b 31 u 1, = b 21 b 22 b 23 1 b 31 b 32 b 33 u 1, = BL (1) u 1,. b 41 b 41 b 42 b 43 D (1) u 1, = d 11 u 1, = [ ] 1 d 11 d 12 d 13 u 1, = DL (1) u 1,. Therefore, L (1) = [ 1 ] T. The locaion marices are known for each seup r. The unknown parameers of model (5)-(6) are θ = {A, B, C, D, Q, R, x, P }, r = 1, 2,..., n r (7) where x and P are he mean and variance of he iniial sae x respecively (which is assumed o be normal disribued). 2.2 Maximum likelihood esimaion: EM algorim We assume all he oupus Y = {Y (1), Y (2),..., Y (nr) }, inpus U = {U (1), U (2),..., U (nr) } and saes X +1 = {X (1) +1, X(2) +1,..., X(nr) +1 } are known (noe ha Y = {y 1, y 2,..., y }, U = {u 1, u 2,..., u } and X +1 = {x 1, x 2,..., X +1 } are he oupus, inpus and saes for one individual record r, respecively). The densiy funcion for record r is given by (see [2]) f θ (X +1, Y U ) = f where under Gaussian assumpion: f (x ) = 1 (2π) ns/2 P (x ) =1 f 1 (X +1 X, U ) =1 f 2 (Y X ( exp 1 ( ) ) 1/2 2 (x x )T P 1 (x x ),, U ), (8) f 1 (X +1 X =, U ) = 1 (2π) ns/2 exp Q 1/2 ( 1 2 (x +1 Ax ) BL u ) T Q 1 (x Ax 1 BL u ), f 2 (Y X =, U ) = 1 (2π) no/2 exp R 1/2 ( 1 2 (y Cx ) DL u ) T R 1 (y Cx DL u ). Thus, if we consider n r independen regisers, he join densiy funcion f θ (X +1, Y U ) will be he produc of he individual ones: n r f θ (X +1, Y U ) = f θ (X +1, Y U ). (9)
4 The complee daa likelihood is defined by L(θ) = f θ (X +1, Y U ). In pracice we generally work wih he log-likelihood, so informaion is combined by addiion and i can be wrien as a sum of he log-likelihood of each individual record: n r log L(θ) = log f θ (X +1, Y nr ) = l (θ), (1) U where l (θ) is he log-likelihood of record r, ha is, l (θ) = log f θ as he sum of hree uncoupled funcions: where, ignoring consans: l (X +1, Y U ). I can be wrien l (θ) = 1 2 [l 1 ( x, P ) + l 2 (A, B, Q) + l 3 (C, D, Q)], (11) l 1 ( x 2 (A, B, Q) = log Q + l 3 (C, D, R) = log R + ( ), P ) = log P + (x x )T P 1 (x (x +1 Ax =1 (y =1 Cx x ), (12) BL u ) T Q 1 (x Ax 1 BL u ), (13) DL u ) T R 1 (y Cx DL u ). (14) The objecive now is o maximize he log-likelihood given by equaion (1). In his work we propose o use a maximizaion procedure based on he Expecaion Maximizaion algorihm (see [2]). The EM algorihm is simple o apply since a each ieraion he opimal soluion for he unknown parameers can be obained from explici formulas. I consiss on wo seps: he E-sep and he M-sep. E-sep (expecaion sep): Given he measured oupus in all he records Y, he measured inpus in all he records U and a value for he parameers θ, he log-likelihood (1) canno be compued because he saes X +1 are unknown (in fac, he saes are unobserved quaniies). The mehod proposes o replace hem wih heir expeced values: n r E[log L(θ) Y, U, θ ] = E[l (θ) Y, U, θ ] = n r + E[l 2 (A, B, Q) Y, U M-sep (maximizaion sep):, θ n r ] + E[l 3 n r E[l 1 ( x (C, D, R) Y, U, P, θ ) Y, U, θ ] ]. (15) Maximizing E[log L(θ) Y, U, θ ] wih respec o he parameers θ, consiues he M-sep. This is he srong poin of he EM algorihm because he maximum values, obained equaing o zero he corresponding derivaives, are obained from explici formulas: θ E[log L(θ) Y, U, θ ] = θ = ˆθ (16) A new E-sep can be now performed considering θ = ˆθ wha gives, applying he M-sep, o a new value for he parameers, ˆθ. This leads o an ieraive procedure in which he wo seps, expecaion and maximizaion, are repeaed unil he likelihood is maximized. This procedure is called he EM algorihm.
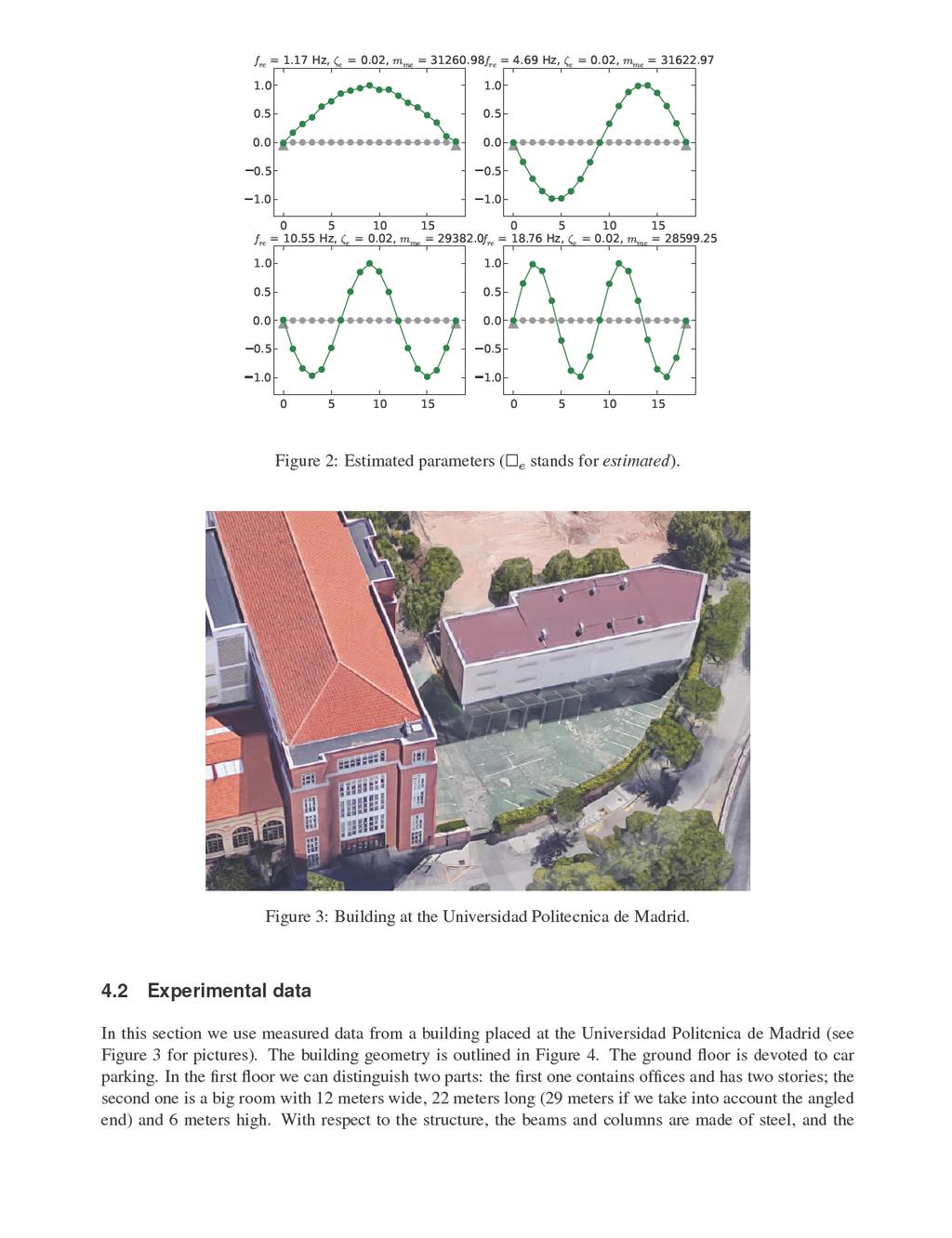
5 3 Compuaion of modal parameers aural frequencies, modal damping raios, mode shapes and modal masses can be rerieved from marices A, B and C using he following equaions (see [3] for a general overview): The eigenvalues of A come in complex conjugae pairs and each pair represens one physical vibraion mode. Assuming proporional damping, he jh eigenvalue of A has he form ) ) λ j = exp (( ζ j ω j ± iω j 1 ζj 2 (17) where ω j are he naural frequencies, ζ j are damping raios, and is he ime sep. aural frequencies ω j and he damping raios ζ j are hen given by ω j = ln (λ j) ζ j = Real [ln (λ j)] ω j (18) (19) The jh mode shape φ j R no evaluaed a sensor locaions can be obained using he following expression: φ y,j = Cψ j (2) where ψ j is he complex eigenvecor of A corresponding o he eigenvalue λ j. Finally, he modal mass corresponding o φ y,j can be compued using m m,j = eλ j 1 λ j (λ j λ j )φt u,jγ j (21) where sands for he pseudo-inverse, γ j R n i 1 sands for he j-h row of marix Γ = V 1 B, wih V meaning he eigenvecors marix of A; φ u,j is he modal vecor φ y,j seleced a he DOFs where he measured inpus are applied (considered as a column vecor). oe ha Equaion (21) can be only used if he measured loads are applied o DOFs wih sensors. 4 umerical examples 4.1 Simulaed daa We have considered a simply suppored beam wih he following characerisics: lengh, L = 2. m; Young modulus, E = /m 2 ; secion momen of ineria, I = m 4 ; densiy, ρ = 785. kg/m 3 ; siffness a boh ends: k 1 = k 2 = 1EI. For he purpose of numerical simulaions, he beam was modelled by 18 Hermiian beam elemens. For he mass marix, he consisen formulaion was considered. The firs four naural frequencies of vibraion are calculaed o be 1.17 Hz, 4.69 Hz, 1.55 Hz and Hz. Viscous damping is assumed wih 2% of criical for all modes. The mode shapes are shown in Figure 1, where hey are scaled o he maximum componen equal o one. The modal mass corresponding o hese mode shapes are calculaed o be 314.6, , and We have generaed nineeen differen sample records (n r = 19) using: Sampling frequency f s = 5 Hz. Toal duraion of signals, 1 seconds ( = 5). An i.i.d. Gaussian whie noise wih variance equal o 1 was used as he measured inpu load for each seup, u. This inpu has been applied node 1 in seup 1, o node 2 in seup 3, and so on.
6
7
8

9 Figure 5: Some esimaed mode shapes. Acknowledgemens This research was suppored by he Miniserio de Educación y Ciencia of Spain under he research projec Prognosis and inegraed analysis of he human-induced vibraions in srucures (BIA C2-1-R). The financial suppor is graefully acknowledged. References [1].J. Jacobsen, Modal parameer esimaion from inconsisen daa, in Proceedings of he Inernaional Conference on oise and Vibraion Engineering - ISMA 212. Leuven, Sepember 212, pp [2] F. J. Cara, J. Carpio, J. Juan, E. Alarcón, An approach o operaional modal analysis using he expecaion maximizaion algorihm, Mechanical Sysems and Signal Processing, Volume 31, Augus 212, pages [3] J. Cara, Compuing he modal mass from he sae space model in combined experimenaloperaional modal analysis, Journal of Sound and Vibraion, Volume 37, pages 94-11, 216. hp://dx.doi.org/1.116/j.jsv [4] F. J. Cara, J. Juan, E. Alarcón, Esimaion of modal parameers in srucures using muliple ime hisory records, in Proceedings of he Inernaional Conference on oise and Vibraion Engineering - ISMA 212. Leuven, Sepember 212, pp
STATE-SPACE MODELLING. A mass balance across the tank gives:
 B. Lennox and N.F. Thornhill, 9, Sae Space Modelling, IChemE Process Managemen and Conrol Subjec Group Newsleer STE-SPACE MODELLING Inroducion: Over he pas decade or so here has been an ever increasing
B. Lennox and N.F. Thornhill, 9, Sae Space Modelling, IChemE Process Managemen and Conrol Subjec Group Newsleer STE-SPACE MODELLING Inroducion: Over he pas decade or so here has been an ever increasing
10. State Space Methods
 . Sae Space Mehods. Inroducion Sae space modelling was briefly inroduced in chaper. Here more coverage is provided of sae space mehods before some of heir uses in conrol sysem design are covered in he
. Sae Space Mehods. Inroducion Sae space modelling was briefly inroduced in chaper. Here more coverage is provided of sae space mehods before some of heir uses in conrol sysem design are covered in he
Georey E. Hinton. University oftoronto. Technical Report CRG-TR February 22, Abstract
 Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Some Basic Information about M-S-D Systems
 Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
State-Space Models. Initialization, Estimation and Smoothing of the Kalman Filter
 Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Testing for a Single Factor Model in the Multivariate State Space Framework
 esing for a Single Facor Model in he Mulivariae Sae Space Framework Chen C.-Y. M. Chiba and M. Kobayashi Inernaional Graduae School of Social Sciences Yokohama Naional Universiy Japan Faculy of Economics
esing for a Single Facor Model in he Mulivariae Sae Space Framework Chen C.-Y. M. Chiba and M. Kobayashi Inernaional Graduae School of Social Sciences Yokohama Naional Universiy Japan Faculy of Economics
Structural Dynamics and Earthquake Engineering
 Srucural Dynamics and Earhquae Engineering Course 1 Inroducion. Single degree of freedom sysems: Equaions of moion, problem saemen, soluion mehods. Course noes are available for download a hp://www.c.up.ro/users/aurelsraan/
Srucural Dynamics and Earhquae Engineering Course 1 Inroducion. Single degree of freedom sysems: Equaions of moion, problem saemen, soluion mehods. Course noes are available for download a hp://www.c.up.ro/users/aurelsraan/
Západočeská Univerzita v Plzni, Czech Republic and Groupe ESIEE Paris, France
 ADAPTIVE SIGNAL PROCESSING USING MAXIMUM ENTROPY ON THE MEAN METHOD AND MONTE CARLO ANALYSIS Pavla Holejšovsá, Ing. *), Z. Peroua, Ing. **), J.-F. Bercher, Prof. Assis. ***) Západočesá Univerzia v Plzni,
ADAPTIVE SIGNAL PROCESSING USING MAXIMUM ENTROPY ON THE MEAN METHOD AND MONTE CARLO ANALYSIS Pavla Holejšovsá, Ing. *), Z. Peroua, Ing. **), J.-F. Bercher, Prof. Assis. ***) Západočesá Univerzia v Plzni,
Simulation-Solving Dynamic Models ABE 5646 Week 2, Spring 2010
 Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
GMM - Generalized Method of Moments
 GMM - Generalized Mehod of Momens Conens GMM esimaion, shor inroducion 2 GMM inuiion: Maching momens 2 3 General overview of GMM esimaion. 3 3. Weighing marix...........................................
GMM - Generalized Mehod of Momens Conens GMM esimaion, shor inroducion 2 GMM inuiion: Maching momens 2 3 General overview of GMM esimaion. 3 3. Weighing marix...........................................
An introduction to the theory of SDDP algorithm
 An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
Let us start with a two dimensional case. We consider a vector ( x,
 Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
PENALIZED LEAST SQUARES AND PENALIZED LIKELIHOOD
 PENALIZED LEAST SQUARES AND PENALIZED LIKELIHOOD HAN XIAO 1. Penalized Leas Squares Lasso solves he following opimizaion problem, ˆβ lasso = arg max β R p+1 1 N y i β 0 N x ij β j β j (1.1) for some 0.
PENALIZED LEAST SQUARES AND PENALIZED LIKELIHOOD HAN XIAO 1. Penalized Leas Squares Lasso solves he following opimizaion problem, ˆβ lasso = arg max β R p+1 1 N y i β 0 N x ij β j β j (1.1) for some 0.
0.1 MAXIMUM LIKELIHOOD ESTIMATION EXPLAINED
 0.1 MAXIMUM LIKELIHOOD ESTIMATIO EXPLAIED Maximum likelihood esimaion is a bes-fi saisical mehod for he esimaion of he values of he parameers of a sysem, based on a se of observaions of a random variable
0.1 MAXIMUM LIKELIHOOD ESTIMATIO EXPLAIED Maximum likelihood esimaion is a bes-fi saisical mehod for he esimaion of he values of he parameers of a sysem, based on a se of observaions of a random variable
Problem Set #1. i z. the complex propagation constant. For the characteristic impedance:
 Problem Se # Problem : a) Using phasor noaion, calculae he volage and curren waves on a ransmission line by solving he wave equaion Assume ha R, L,, G are all non-zero and independen of frequency From
Problem Se # Problem : a) Using phasor noaion, calculae he volage and curren waves on a ransmission line by solving he wave equaion Assume ha R, L,, G are all non-zero and independen of frequency From
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Inventory Control of Perishable Items in a Two-Echelon Supply Chain
 Journal of Indusrial Engineering, Universiy of ehran, Special Issue,, PP. 69-77 69 Invenory Conrol of Perishable Iems in a wo-echelon Supply Chain Fariborz Jolai *, Elmira Gheisariha and Farnaz Nojavan
Journal of Indusrial Engineering, Universiy of ehran, Special Issue,, PP. 69-77 69 Invenory Conrol of Perishable Iems in a wo-echelon Supply Chain Fariborz Jolai *, Elmira Gheisariha and Farnaz Nojavan
Spring Ammar Abu-Hudrouss Islamic University Gaza
 Chaper 7 Reed-Solomon Code Spring 9 Ammar Abu-Hudrouss Islamic Universiy Gaza ١ Inroducion A Reed Solomon code is a special case of a BCH code in which he lengh of he code is one less han he size of he
Chaper 7 Reed-Solomon Code Spring 9 Ammar Abu-Hudrouss Islamic Universiy Gaza ١ Inroducion A Reed Solomon code is a special case of a BCH code in which he lengh of he code is one less han he size of he
Application of a Stochastic-Fuzzy Approach to Modeling Optimal Discrete Time Dynamical Systems by Using Large Scale Data Processing
 Applicaion of a Sochasic-Fuzzy Approach o Modeling Opimal Discree Time Dynamical Sysems by Using Large Scale Daa Processing AA WALASZE-BABISZEWSA Deparmen of Compuer Engineering Opole Universiy of Technology
Applicaion of a Sochasic-Fuzzy Approach o Modeling Opimal Discree Time Dynamical Sysems by Using Large Scale Daa Processing AA WALASZE-BABISZEWSA Deparmen of Compuer Engineering Opole Universiy of Technology
Finite Element Analysis of Structures
 KAIT OE5 Finie Elemen Analysis of rucures Mid-erm Exam, Fall 9 (p) m. As shown in Fig., we model a russ srucure of uniform area (lengh, Area Am ) subjeced o a uniform body force ( f B e x N / m ) using
KAIT OE5 Finie Elemen Analysis of rucures Mid-erm Exam, Fall 9 (p) m. As shown in Fig., we model a russ srucure of uniform area (lengh, Area Am ) subjeced o a uniform body force ( f B e x N / m ) using
Kalman filtering for maximum likelihood estimation given corrupted observations.
 alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
Notes on Kalman Filtering
 Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Two Coupled Oscillators / Normal Modes
 Lecure 3 Phys 3750 Two Coupled Oscillaors / Normal Modes Overview and Moivaion: Today we ake a small, bu significan, sep owards wave moion. We will no ye observe waves, bu his sep is imporan in is own
Lecure 3 Phys 3750 Two Coupled Oscillaors / Normal Modes Overview and Moivaion: Today we ake a small, bu significan, sep owards wave moion. We will no ye observe waves, bu his sep is imporan in is own
Ordinary Differential Equations
 Ordinary Differenial Equaions 5. Examples of linear differenial equaions and heir applicaions We consider some examples of sysems of linear differenial equaions wih consan coefficiens y = a y +... + a
Ordinary Differenial Equaions 5. Examples of linear differenial equaions and heir applicaions We consider some examples of sysems of linear differenial equaions wih consan coefficiens y = a y +... + a
An recursive analytical technique to estimate time dependent physical parameters in the presence of noise processes
 WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
References are appeared in the last slide. Last update: (1393/08/19)
") SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
EXPLICIT TIME INTEGRATORS FOR NONLINEAR DYNAMICS DERIVED FROM THE MIDPOINT RULE
 Version April 30, 2004.Submied o CTU Repors. EXPLICIT TIME INTEGRATORS FOR NONLINEAR DYNAMICS DERIVED FROM THE MIDPOINT RULE Per Krysl Universiy of California, San Diego La Jolla, California 92093-0085,
Version April 30, 2004.Submied o CTU Repors. EXPLICIT TIME INTEGRATORS FOR NONLINEAR DYNAMICS DERIVED FROM THE MIDPOINT RULE Per Krysl Universiy of California, San Diego La Jolla, California 92093-0085,
Math Week 14 April 16-20: sections first order systems of linear differential equations; 7.4 mass-spring systems.
 Mah 2250-004 Week 4 April 6-20 secions 7.-7.3 firs order sysems of linear differenial equaions; 7.4 mass-spring sysems. Mon Apr 6 7.-7.2 Sysems of differenial equaions (7.), and he vecor Calculus we need
Mah 2250-004 Week 4 April 6-20 secions 7.-7.3 firs order sysems of linear differenial equaions; 7.4 mass-spring sysems. Mon Apr 6 7.-7.2 Sysems of differenial equaions (7.), and he vecor Calculus we need
Random Walk with Anti-Correlated Steps
 Random Walk wih Ani-Correlaed Seps John Noga Dirk Wagner 2 Absrac We conjecure he expeced value of random walks wih ani-correlaed seps o be exacly. We suppor his conjecure wih 2 plausibiliy argumens and
Random Walk wih Ani-Correlaed Seps John Noga Dirk Wagner 2 Absrac We conjecure he expeced value of random walks wih ani-correlaed seps o be exacly. We suppor his conjecure wih 2 plausibiliy argumens and
Robust estimation based on the first- and third-moment restrictions of the power transformation model
 h Inernaional Congress on Modelling and Simulaion, Adelaide, Ausralia, 6 December 3 www.mssanz.org.au/modsim3 Robus esimaion based on he firs- and hird-momen resricions of he power ransformaion Nawaa,
h Inernaional Congress on Modelling and Simulaion, Adelaide, Ausralia, 6 December 3 www.mssanz.org.au/modsim3 Robus esimaion based on he firs- and hird-momen resricions of he power ransformaion Nawaa,
Chapter 2. First Order Scalar Equations
 Chaper. Firs Order Scalar Equaions We sar our sudy of differenial equaions in he same way he pioneers in his field did. We show paricular echniques o solve paricular ypes of firs order differenial equaions.
Chaper. Firs Order Scalar Equaions We sar our sudy of differenial equaions in he same way he pioneers in his field did. We show paricular echniques o solve paricular ypes of firs order differenial equaions.
ACE 562 Fall Lecture 5: The Simple Linear Regression Model: Sampling Properties of the Least Squares Estimators. by Professor Scott H.
 ACE 56 Fall 005 Lecure 5: he Simple Linear Regression Model: Sampling Properies of he Leas Squares Esimaors by Professor Sco H. Irwin Required Reading: Griffihs, Hill and Judge. "Inference in he Simple
ACE 56 Fall 005 Lecure 5: he Simple Linear Regression Model: Sampling Properies of he Leas Squares Esimaors by Professor Sco H. Irwin Required Reading: Griffihs, Hill and Judge. "Inference in he Simple
Section 3.5 Nonhomogeneous Equations; Method of Undetermined Coefficients
 Secion 3.5 Nonhomogeneous Equaions; Mehod of Undeermined Coefficiens Key Terms/Ideas: Linear Differenial operaor Nonlinear operaor Second order homogeneous DE Second order nonhomogeneous DE Soluion o homogeneous
Secion 3.5 Nonhomogeneous Equaions; Mehod of Undeermined Coefficiens Key Terms/Ideas: Linear Differenial operaor Nonlinear operaor Second order homogeneous DE Second order nonhomogeneous DE Soluion o homogeneous
Program: RFEM 5, RSTAB 8, RF-DYNAM Pro, DYNAM Pro. Category: Isotropic Linear Elasticity, Dynamics, Member
 Verificaion Example Program: RFEM 5, RSTAB 8, RF-DYNAM Pro, DYNAM Pro Caegory: Isoropic Linear Elasiciy, Dynamics, Member Verificaion Example: 0104 Canilever Beam wih Periodic Exciaion 0104 Canilever Beam
Verificaion Example Program: RFEM 5, RSTAB 8, RF-DYNAM Pro, DYNAM Pro Caegory: Isoropic Linear Elasiciy, Dynamics, Member Verificaion Example: 0104 Canilever Beam wih Periodic Exciaion 0104 Canilever Beam
Math 334 Fall 2011 Homework 11 Solutions
 Dec. 2, 2 Mah 334 Fall 2 Homework Soluions Basic Problem. Transform he following iniial value problem ino an iniial value problem for a sysem: u + p()u + q() u g(), u() u, u () v. () Soluion. Le v u. Then
Dec. 2, 2 Mah 334 Fall 2 Homework Soluions Basic Problem. Transform he following iniial value problem ino an iniial value problem for a sysem: u + p()u + q() u g(), u() u, u () v. () Soluion. Le v u. Then
Robert Kollmann. 6 September 2017
 Appendix: Supplemenary maerial for Tracable Likelihood-Based Esimaion of Non- Linear DSGE Models Economics Leers (available online 6 Sepember 207) hp://dx.doi.org/0.06/j.econle.207.08.027 Rober Kollmann
Appendix: Supplemenary maerial for Tracable Likelihood-Based Esimaion of Non- Linear DSGE Models Economics Leers (available online 6 Sepember 207) hp://dx.doi.org/0.06/j.econle.207.08.027 Rober Kollmann
12: AUTOREGRESSIVE AND MOVING AVERAGE PROCESSES IN DISCRETE TIME. Σ j =
 1: AUTOREGRESSIVE AND MOVING AVERAGE PROCESSES IN DISCRETE TIME Moving Averages Recall ha a whie noise process is a series { } = having variance σ. The whie noise process has specral densiy f (λ) = of
1: AUTOREGRESSIVE AND MOVING AVERAGE PROCESSES IN DISCRETE TIME Moving Averages Recall ha a whie noise process is a series { } = having variance σ. The whie noise process has specral densiy f (λ) = of
DERIVATION OF MASS, STIFFNESS AND DAMPING MATRICES OF A MODEL WING FROM EXPERIMENTAL MODAL DATA
 SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 DERIVATION OF MASS, STIFFNESS AND DAMPING MATRICES OF A MODEL WING FROM EXPERIMENTAL MODAL DATA Ionel POPESCU, Lică FLORE, Alber ARNAU CUBILLO
SCIENTIFIC RESEARCH AND EDUCATION IN THE AIR FORCE AFASES2017 DERIVATION OF MASS, STIFFNESS AND DAMPING MATRICES OF A MODEL WING FROM EXPERIMENTAL MODAL DATA Ionel POPESCU, Lică FLORE, Alber ARNAU CUBILLO
Lecture 1 Overview. course mechanics. outline & topics. what is a linear dynamical system? why study linear systems? some examples
 EE263 Auumn 27-8 Sephen Boyd Lecure 1 Overview course mechanics ouline & opics wha is a linear dynamical sysem? why sudy linear sysems? some examples 1 1 Course mechanics all class info, lecures, homeworks,
EE263 Auumn 27-8 Sephen Boyd Lecure 1 Overview course mechanics ouline & opics wha is a linear dynamical sysem? why sudy linear sysems? some examples 1 1 Course mechanics all class info, lecures, homeworks,
Object tracking: Using HMMs to estimate the geographical location of fish
 Objec racking: Using HMMs o esimae he geographical locaion of fish 02433 - Hidden Markov Models Marin Wæver Pedersen, Henrik Madsen Course week 13 MWP, compiled June 8, 2011 Objecive: Locae fish from agging
Objec racking: Using HMMs o esimae he geographical locaion of fish 02433 - Hidden Markov Models Marin Wæver Pedersen, Henrik Madsen Course week 13 MWP, compiled June 8, 2011 Objecive: Locae fish from agging
Diebold, Chapter 7. Francis X. Diebold, Elements of Forecasting, 4th Edition (Mason, Ohio: Cengage Learning, 2006). Chapter 7. Characterizing Cycles
. Chapter 7. Characterizing Cycles") Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
MATH 5720: Gradient Methods Hung Phan, UMass Lowell October 4, 2018
 MATH 5720: Gradien Mehods Hung Phan, UMass Lowell Ocober 4, 208 Descen Direcion Mehods Consider he problem min { f(x) x R n}. The general descen direcions mehod is x k+ = x k + k d k where x k is he curren
MATH 5720: Gradien Mehods Hung Phan, UMass Lowell Ocober 4, 208 Descen Direcion Mehods Consider he problem min { f(x) x R n}. The general descen direcions mehod is x k+ = x k + k d k where x k is he curren
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
ODEs II, Lecture 1: Homogeneous Linear Systems - I. Mike Raugh 1. March 8, 2004
 ODEs II, Lecure : Homogeneous Linear Sysems - I Mike Raugh March 8, 4 Inroducion. In he firs lecure we discussed a sysem of linear ODEs for modeling he excreion of lead from he human body, saw how o ransform
ODEs II, Lecure : Homogeneous Linear Sysems - I Mike Raugh March 8, 4 Inroducion. In he firs lecure we discussed a sysem of linear ODEs for modeling he excreion of lead from he human body, saw how o ransform
How to Deal with Structural Breaks in Practical Cointegration Analysis
 How o Deal wih Srucural Breaks in Pracical Coinegraion Analysis Roselyne Joyeux * School of Economic and Financial Sudies Macquarie Universiy December 00 ABSTRACT In his noe we consider he reamen of srucural
How o Deal wih Srucural Breaks in Pracical Coinegraion Analysis Roselyne Joyeux * School of Economic and Financial Sudies Macquarie Universiy December 00 ABSTRACT In his noe we consider he reamen of srucural
Computation of the Effect of Space Harmonics on Starting Process of Induction Motors Using TSFEM
 Journal of elecrical sysems Special Issue N 01 : November 2009 pp: 48-52 Compuaion of he Effec of Space Harmonics on Saring Process of Inducion Moors Using TSFEM Youcef Ouazir USTHB Laboraoire des sysèmes
Journal of elecrical sysems Special Issue N 01 : November 2009 pp: 48-52 Compuaion of he Effec of Space Harmonics on Saring Process of Inducion Moors Using TSFEM Youcef Ouazir USTHB Laboraoire des sysèmes
Sub Module 2.6. Measurement of transient temperature
 Mechanical Measuremens Prof. S.P.Venkaeshan Sub Module 2.6 Measuremen of ransien emperaure Many processes of engineering relevance involve variaions wih respec o ime. The sysem properies like emperaure,
Mechanical Measuremens Prof. S.P.Venkaeshan Sub Module 2.6 Measuremen of ransien emperaure Many processes of engineering relevance involve variaions wih respec o ime. The sysem properies like emperaure,
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Optimal Path Planning for Flexible Redundant Robot Manipulators
 25 WSEAS In. Conf. on DYNAMICAL SYSEMS and CONROL, Venice, Ialy, November 2-4, 25 (pp363-368) Opimal Pah Planning for Flexible Redundan Robo Manipulaors H. HOMAEI, M. KESHMIRI Deparmen of Mechanical Engineering
25 WSEAS In. Conf. on DYNAMICAL SYSEMS and CONROL, Venice, Ialy, November 2-4, 25 (pp363-368) Opimal Pah Planning for Flexible Redundan Robo Manipulaors H. HOMAEI, M. KESHMIRI Deparmen of Mechanical Engineering
Mechanical Fatigue and Load-Induced Aging of Loudspeaker Suspension. Wolfgang Klippel,
 Mechanical Faigue and Load-Induced Aging of Loudspeaker Suspension Wolfgang Klippel, Insiue of Acousics and Speech Communicaion Dresden Universiy of Technology presened a he ALMA Symposium 2012, Las Vegas
Mechanical Faigue and Load-Induced Aging of Loudspeaker Suspension Wolfgang Klippel, Insiue of Acousics and Speech Communicaion Dresden Universiy of Technology presened a he ALMA Symposium 2012, Las Vegas
where the coordinate X (t) describes the system motion. X has its origin at the system static equilibrium position (SEP).
 describes the system motion. X has its origin at the system static equilibrium position (SEP).") Appendix A: Conservaion of Mechanical Energy = Conservaion of Linear Momenum Consider he moion of a nd order mechanical sysem comprised of he fundamenal mechanical elemens: ineria or mass (M), siffness
Appendix A: Conservaion of Mechanical Energy = Conservaion of Linear Momenum Consider he moion of a nd order mechanical sysem comprised of he fundamenal mechanical elemens: ineria or mass (M), siffness
ON THE BEAT PHENOMENON IN COUPLED SYSTEMS
 8 h ASCE Specialy Conference on Probabilisic Mechanics and Srucural Reliabiliy PMC-38 ON THE BEAT PHENOMENON IN COUPLED SYSTEMS S. K. Yalla, Suden Member ASCE and A. Kareem, M. ASCE NaHaz Modeling Laboraory,
8 h ASCE Specialy Conference on Probabilisic Mechanics and Srucural Reliabiliy PMC-38 ON THE BEAT PHENOMENON IN COUPLED SYSTEMS S. K. Yalla, Suden Member ASCE and A. Kareem, M. ASCE NaHaz Modeling Laboraory,
d 1 = c 1 b 2 - b 1 c 2 d 2 = c 1 b 3 - b 1 c 3
 and d = c b - b c c d = c b - b c c This process is coninued unil he nh row has been compleed. The complee array of coefficiens is riangular. Noe ha in developing he array an enire row may be divided or
and d = c b - b c c d = c b - b c c This process is coninued unil he nh row has been compleed. The complee array of coefficiens is riangular. Noe ha in developing he array an enire row may be divided or
CONFIDENCE LIMITS AND THEIR ROBUSTNESS
 CONFIDENCE LIMITS AND THEIR ROBUSTNESS Rajendran Raja Fermi Naional Acceleraor laboraory Baavia, IL 60510 Absrac Confidence limis are common place in physics analysis. Grea care mus be aken in heir calculaion
CONFIDENCE LIMITS AND THEIR ROBUSTNESS Rajendran Raja Fermi Naional Acceleraor laboraory Baavia, IL 60510 Absrac Confidence limis are common place in physics analysis. Grea care mus be aken in heir calculaion
Announcements: Warm-up Exercise:
 Fri Apr 13 7.1 Sysems of differenial equaions - o model muli-componen sysems via comparmenal analysis hp//en.wikipedia.org/wiki/muli-comparmen_model Announcemens Warm-up Exercise Here's a relaively simple
Fri Apr 13 7.1 Sysems of differenial equaions - o model muli-componen sysems via comparmenal analysis hp//en.wikipedia.org/wiki/muli-comparmen_model Announcemens Warm-up Exercise Here's a relaively simple
R t. C t P t. + u t. C t = αp t + βr t + v t. + β + w t
 Exercise 7 C P = α + β R P + u C = αp + βr + v (a) (b) C R = α P R + β + w (c) Assumpions abou he disurbances u, v, w : Classical assumions on he disurbance of one of he equaions, eg. on (b): E(v v s P,
Exercise 7 C P = α + β R P + u C = αp + βr + v (a) (b) C R = α P R + β + w (c) Assumpions abou he disurbances u, v, w : Classical assumions on he disurbance of one of he equaions, eg. on (b): E(v v s P,
Chapter 3 Boundary Value Problem
 Chaper 3 Boundary Value Problem A boundary value problem (BVP) is a problem, ypically an ODE or a PDE, which has values assigned on he physical boundary of he domain in which he problem is specified. Le
Chaper 3 Boundary Value Problem A boundary value problem (BVP) is a problem, ypically an ODE or a PDE, which has values assigned on he physical boundary of he domain in which he problem is specified. Le
Dynamic Analysis of Loads Moving Over Structures
 h Inernaional ongress of roaian ociey of echanics epember, 18-, 3 Bizovac, roaia ynamic nalysis of Loads oving Over rucures Ivica Kožar, Ivana Šimac Keywords: moving load, direc acceleraion mehod 1. Inroducion
h Inernaional ongress of roaian ociey of echanics epember, 18-, 3 Bizovac, roaia ynamic nalysis of Loads oving Over rucures Ivica Kožar, Ivana Šimac Keywords: moving load, direc acceleraion mehod 1. Inroducion
Module 4: Time Response of discrete time systems Lecture Note 2
 Module 4: Time Response of discree ime sysems Lecure Noe 2 1 Prooype second order sysem The sudy of a second order sysem is imporan because many higher order sysem can be approimaed by a second order model
Module 4: Time Response of discree ime sysems Lecure Noe 2 1 Prooype second order sysem The sudy of a second order sysem is imporan because many higher order sysem can be approimaed by a second order model
Math 315: Linear Algebra Solutions to Assignment 6
 Mah 35: Linear Algebra s o Assignmen 6 # Which of he following ses of vecors are bases for R 2? {2,, 3, }, {4,, 7, 8}, {,,, 3}, {3, 9, 4, 2}. Explain your answer. To generae he whole R 2, wo linearly independen
Mah 35: Linear Algebra s o Assignmen 6 # Which of he following ses of vecors are bases for R 2? {2,, 3, }, {4,, 7, 8}, {,,, 3}, {3, 9, 4, 2}. Explain your answer. To generae he whole R 2, wo linearly independen
Isolated-word speech recognition using hidden Markov models
 Isolaed-word speech recogniion using hidden Markov models Håkon Sandsmark December 18, 21 1 Inroducion Speech recogniion is a challenging problem on which much work has been done he las decades. Some of
Isolaed-word speech recogniion using hidden Markov models Håkon Sandsmark December 18, 21 1 Inroducion Speech recogniion is a challenging problem on which much work has been done he las decades. Some of
Linear Response Theory: The connection between QFT and experiments
 Phys540.nb 39 3 Linear Response Theory: The connecion beween QFT and experimens 3.1. Basic conceps and ideas Q: How do we measure he conduciviy of a meal? A: we firs inroduce a weak elecric field E, and
Phys540.nb 39 3 Linear Response Theory: The connecion beween QFT and experimens 3.1. Basic conceps and ideas Q: How do we measure he conduciviy of a meal? A: we firs inroduce a weak elecric field E, and
ECE 2100 Circuit Analysis
 ECE 1 Circui Analysis Lesson 35 Chaper 8: Second Order Circuis Daniel M. Liynski, Ph.D. ECE 1 Circui Analysis Lesson 3-34 Chaper 7: Firs Order Circuis (Naural response RC & RL circuis, Singulariy funcions,
ECE 1 Circui Analysis Lesson 35 Chaper 8: Second Order Circuis Daniel M. Liynski, Ph.D. ECE 1 Circui Analysis Lesson 3-34 Chaper 7: Firs Order Circuis (Naural response RC & RL circuis, Singulariy funcions,
Time series model fitting via Kalman smoothing and EM estimation in TimeModels.jl
 Time series model fiing via Kalman smoohing and EM esimaion in TimeModels.jl Gord Sephen Las updaed: January 206 Conens Inroducion 2. Moivaion and Acknowledgemens....................... 2.2 Noaion......................................
Time series model fiing via Kalman smoohing and EM esimaion in TimeModels.jl Gord Sephen Las updaed: January 206 Conens Inroducion 2. Moivaion and Acknowledgemens....................... 2.2 Noaion......................................
RC, RL and RLC circuits
 Name Dae Time o Complee h m Parner Course/ Secion / Grade RC, RL and RLC circuis Inroducion In his experimen we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors.
Name Dae Time o Complee h m Parner Course/ Secion / Grade RC, RL and RLC circuis Inroducion In his experimen we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors.
ADDITIONAL PROBLEMS (a) Find the Fourier transform of the half-cosine pulse shown in Fig. 2.40(a). Additional Problems 91
 Find the Fourier transform of the half-cosine pulse shown in Fig. 2.40(a). Additional Problems 91") ddiional Problems 9 n inverse relaionship exiss beween he ime-domain and freuency-domain descripions of a signal. Whenever an operaion is performed on he waveform of a signal in he ime domain, a corresponding
ddiional Problems 9 n inverse relaionship exiss beween he ime-domain and freuency-domain descripions of a signal. Whenever an operaion is performed on he waveform of a signal in he ime domain, a corresponding
Recursive Least-Squares Fixed-Interval Smoother Using Covariance Information based on Innovation Approach in Linear Continuous Stochastic Systems
 8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
Bias in Conditional and Unconditional Fixed Effects Logit Estimation: a Correction * Tom Coupé
 Bias in Condiional and Uncondiional Fixed Effecs Logi Esimaion: a Correcion * Tom Coupé Economics Educaion and Research Consorium, Naional Universiy of Kyiv Mohyla Academy Address: Vul Voloska 10, 04070
Bias in Condiional and Uncondiional Fixed Effecs Logi Esimaion: a Correcion * Tom Coupé Economics Educaion and Research Consorium, Naional Universiy of Kyiv Mohyla Academy Address: Vul Voloska 10, 04070
Combined Bending with Induced or Applied Torsion of FRP I-Section Beams
 Combined Bending wih Induced or Applied Torsion of FRP I-Secion Beams MOJTABA B. SIRJANI School of Science and Technology Norfolk Sae Universiy Norfolk, Virginia 34504 USA sirjani@nsu.edu STEA B. BONDI
Combined Bending wih Induced or Applied Torsion of FRP I-Secion Beams MOJTABA B. SIRJANI School of Science and Technology Norfolk Sae Universiy Norfolk, Virginia 34504 USA sirjani@nsu.edu STEA B. BONDI
R.#W.#Erickson# Department#of#Electrical,#Computer,#and#Energy#Engineering# University#of#Colorado,#Boulder#
 .#W.#Erickson# Deparmen#of#Elecrical,#Compuer,#and#Energy#Engineering# Universiy#of#Colorado,#Boulder# Chaper 2 Principles of Seady-Sae Converer Analysis 2.1. Inroducion 2.2. Inducor vol-second balance,
.#W.#Erickson# Deparmen#of#Elecrical,#Compuer,#and#Energy#Engineering# Universiy#of#Colorado,#Boulder# Chaper 2 Principles of Seady-Sae Converer Analysis 2.1. Inroducion 2.2. Inducor vol-second balance,
Final Spring 2007
 .615 Final Spring 7 Overview The purpose of he final exam is o calculae he MHD β limi in a high-bea oroidal okamak agains he dangerous n = 1 exernal ballooning-kink mode. Effecively, his corresponds o
.615 Final Spring 7 Overview The purpose of he final exam is o calculae he MHD β limi in a high-bea oroidal okamak agains he dangerous n = 1 exernal ballooning-kink mode. Effecively, his corresponds o
dt = C exp (3 ln t 4 ). t 4 W = C exp ( ln(4 t) 3) = C(4 t) 3.
. t 4 W = C exp ( ln(4 t) 3) = C(4 t) 3.") Mah Rahman Exam Review Soluions () Consider he IVP: ( 4)y 3y + 4y = ; y(3) = 0, y (3) =. (a) Please deermine he longes inerval for which he IVP is guaraneed o have a unique soluion. Soluion: The disconinuiies
Mah Rahman Exam Review Soluions () Consider he IVP: ( 4)y 3y + 4y = ; y(3) = 0, y (3) =. (a) Please deermine he longes inerval for which he IVP is guaraneed o have a unique soluion. Soluion: The disconinuiies
Chapter 6. Systems of First Order Linear Differential Equations
 Chaper 6 Sysems of Firs Order Linear Differenial Equaions We will only discuss firs order sysems However higher order sysems may be made ino firs order sysems by a rick shown below We will have a sligh
Chaper 6 Sysems of Firs Order Linear Differenial Equaions We will only discuss firs order sysems However higher order sysems may be made ino firs order sysems by a rick shown below We will have a sligh
Lecture 9: September 25
 0-725: Opimizaion Fall 202 Lecure 9: Sepember 25 Lecurer: Geoff Gordon/Ryan Tibshirani Scribes: Xuezhi Wang, Subhodeep Moira, Abhimanu Kumar Noe: LaTeX emplae couresy of UC Berkeley EECS dep. Disclaimer:
0-725: Opimizaion Fall 202 Lecure 9: Sepember 25 Lecurer: Geoff Gordon/Ryan Tibshirani Scribes: Xuezhi Wang, Subhodeep Moira, Abhimanu Kumar Noe: LaTeX emplae couresy of UC Berkeley EECS dep. Disclaimer:
t is a basis for the solution space to this system, then the matrix having these solutions as columns, t x 1 t, x 2 t,... x n t x 2 t...
 Mah 228- Fri Mar 24 5.6 Marix exponenials and linear sysems: The analogy beween firs order sysems of linear differenial equaions (Chaper 5) and scalar linear differenial equaions (Chaper ) is much sronger
Mah 228- Fri Mar 24 5.6 Marix exponenials and linear sysems: The analogy beween firs order sysems of linear differenial equaions (Chaper 5) and scalar linear differenial equaions (Chaper ) is much sronger
Block Diagram of a DCS in 411
 Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
EE363 homework 1 solutions
 EE363 Prof. S. Boyd EE363 homework 1 soluions 1. LQR for a riple accumulaor. We consider he sysem x +1 = Ax + Bu, y = Cx, wih 1 1 A = 1 1, B =, C = [ 1 ]. 1 1 This sysem has ransfer funcion H(z) = (z 1)
EE363 Prof. S. Boyd EE363 homework 1 soluions 1. LQR for a riple accumulaor. We consider he sysem x +1 = Ax + Bu, y = Cx, wih 1 1 A = 1 1, B =, C = [ 1 ]. 1 1 This sysem has ransfer funcion H(z) = (z 1)
EECE251. Circuit Analysis I. Set 4: Capacitors, Inductors, and First-Order Linear Circuits
 EEE25 ircui Analysis I Se 4: apaciors, Inducors, and Firs-Order inear ircuis Shahriar Mirabbasi Deparmen of Elecrical and ompuer Engineering Universiy of Briish olumbia shahriar@ece.ubc.ca Overview Passive
EEE25 ircui Analysis I Se 4: apaciors, Inducors, and Firs-Order inear ircuis Shahriar Mirabbasi Deparmen of Elecrical and ompuer Engineering Universiy of Briish olumbia shahriar@ece.ubc.ca Overview Passive
Energy Storage Benchmark Problems
 Energy Sorage Benchmark Problems Daniel F. Salas 1,3, Warren B. Powell 2,3 1 Deparmen of Chemical & Biological Engineering 2 Deparmen of Operaions Research & Financial Engineering 3 Princeon Laboraory
Energy Sorage Benchmark Problems Daniel F. Salas 1,3, Warren B. Powell 2,3 1 Deparmen of Chemical & Biological Engineering 2 Deparmen of Operaions Research & Financial Engineering 3 Princeon Laboraory
CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK
 175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
Lecture 4 Kinetics of a particle Part 3: Impulse and Momentum
 MEE Engineering Mechanics II Lecure 4 Lecure 4 Kineics of a paricle Par 3: Impulse and Momenum Linear impulse and momenum Saring from he equaion of moion for a paricle of mass m which is subjeced o an
MEE Engineering Mechanics II Lecure 4 Lecure 4 Kineics of a paricle Par 3: Impulse and Momenum Linear impulse and momenum Saring from he equaion of moion for a paricle of mass m which is subjeced o an
Lecture 2 October ε-approximation of 2-player zero-sum games
 Opimizaion II Winer 009/10 Lecurer: Khaled Elbassioni Lecure Ocober 19 1 ε-approximaion of -player zero-sum games In his lecure we give a randomized ficiious play algorihm for obaining an approximae soluion
Opimizaion II Winer 009/10 Lecurer: Khaled Elbassioni Lecure Ocober 19 1 ε-approximaion of -player zero-sum games In his lecure we give a randomized ficiious play algorihm for obaining an approximae soluion
On Measuring Pro-Poor Growth. 1. On Various Ways of Measuring Pro-Poor Growth: A Short Review of the Literature
 On Measuring Pro-Poor Growh 1. On Various Ways of Measuring Pro-Poor Growh: A Shor eview of he Lieraure During he pas en years or so here have been various suggesions concerning he way one should check
On Measuring Pro-Poor Growh 1. On Various Ways of Measuring Pro-Poor Growh: A Shor eview of he Lieraure During he pas en years or so here have been various suggesions concerning he way one should check
Modeling Economic Time Series with Stochastic Linear Difference Equations
 A. Thiemer, SLDG.mcd, 6..6 FH-Kiel Universiy of Applied Sciences Prof. Dr. Andreas Thiemer e-mail: andreas.hiemer@fh-kiel.de Modeling Economic Time Series wih Sochasic Linear Difference Equaions Summary:
A. Thiemer, SLDG.mcd, 6..6 FH-Kiel Universiy of Applied Sciences Prof. Dr. Andreas Thiemer e-mail: andreas.hiemer@fh-kiel.de Modeling Economic Time Series wih Sochasic Linear Difference Equaions Summary:
Electrical and current self-induction
 Elecrical and curren self-inducion F. F. Mende hp://fmnauka.narod.ru/works.hml mende_fedor@mail.ru Absrac The aricle considers he self-inducance of reacive elemens. Elecrical self-inducion To he laws of
Elecrical and curren self-inducion F. F. Mende hp://fmnauka.narod.ru/works.hml mende_fedor@mail.ru Absrac The aricle considers he self-inducance of reacive elemens. Elecrical self-inducion To he laws of
INTRODUCTION TO MACHINE LEARNING 3RD EDITION
 ETHEM ALPAYDIN The MIT Press, 2014 Lecure Slides for INTRODUCTION TO MACHINE LEARNING 3RD EDITION alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/~ehem/i2ml3e CHAPTER 2: SUPERVISED LEARNING Learning a Class
ETHEM ALPAYDIN The MIT Press, 2014 Lecure Slides for INTRODUCTION TO MACHINE LEARNING 3RD EDITION alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/~ehem/i2ml3e CHAPTER 2: SUPERVISED LEARNING Learning a Class
HW6: MRI Imaging Pulse Sequences (7 Problems for 100 pts)
") HW6: MRI Imaging Pulse Sequences (7 Problems for 100 ps) GOAL The overall goal of HW6 is o beer undersand pulse sequences for MRI image reconsrucion. OBJECTIVES 1) Design a spin echo pulse sequence o image
HW6: MRI Imaging Pulse Sequences (7 Problems for 100 ps) GOAL The overall goal of HW6 is o beer undersand pulse sequences for MRI image reconsrucion. OBJECTIVES 1) Design a spin echo pulse sequence o image
Navneet Saini, Mayank Goyal, Vishal Bansal (2013); Term Project AML310; Indian Institute of Technology Delhi
; Term Project AML310; Indian Institute of Technology Delhi") Creep in Viscoelasic Subsances Numerical mehods o calculae he coefficiens of he Prony equaion using creep es daa and Herediary Inegrals Mehod Navnee Saini, Mayank Goyal, Vishal Bansal (23); Term Projec
Creep in Viscoelasic Subsances Numerical mehods o calculae he coefficiens of he Prony equaion using creep es daa and Herediary Inegrals Mehod Navnee Saini, Mayank Goyal, Vishal Bansal (23); Term Projec
In this chapter the model of free motion under gravity is extended to objects projected at an angle. When you have completed it, you should
 Cambridge Universiy Press 978--36-60033-7 Cambridge Inernaional AS and A Level Mahemaics: Mechanics Coursebook Excerp More Informaion Chaper The moion of projeciles In his chaper he model of free moion
Cambridge Universiy Press 978--36-60033-7 Cambridge Inernaional AS and A Level Mahemaics: Mechanics Coursebook Excerp More Informaion Chaper The moion of projeciles In his chaper he model of free moion
Generalized Least Squares
 Generalized Leas Squares Augus 006 1 Modified Model Original assumpions: 1 Specificaion: y = Xβ + ε (1) Eε =0 3 EX 0 ε =0 4 Eεε 0 = σ I In his secion, we consider relaxing assumpion (4) Insead, assume
Generalized Leas Squares Augus 006 1 Modified Model Original assumpions: 1 Specificaion: y = Xβ + ε (1) Eε =0 3 EX 0 ε =0 4 Eεε 0 = σ I In his secion, we consider relaxing assumpion (4) Insead, assume
Reliability of Technical Systems
 eliabiliy of Technical Sysems Main Topics Inroducion, Key erms, framing he problem eliabiliy parameers: Failure ae, Failure Probabiliy, Availabiliy, ec. Some imporan reliabiliy disribuions Componen reliabiliy
eliabiliy of Technical Sysems Main Topics Inroducion, Key erms, framing he problem eliabiliy parameers: Failure ae, Failure Probabiliy, Availabiliy, ec. Some imporan reliabiliy disribuions Componen reliabiliy
From Particles to Rigid Bodies
 Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM
 WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
Chapter 8 The Complete Response of RL and RC Circuits
 Chaper 8 The Complee Response of RL and RC Circuis Seoul Naional Universiy Deparmen of Elecrical and Compuer Engineering Wha is Firs Order Circuis? Circuis ha conain only one inducor or only one capacior
Chaper 8 The Complee Response of RL and RC Circuis Seoul Naional Universiy Deparmen of Elecrical and Compuer Engineering Wha is Firs Order Circuis? Circuis ha conain only one inducor or only one capacior
KINEMATICS IN ONE DIMENSION
 KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
Learning Objectives: Practice designing and simulating digital circuits including flip flops Experience state machine design procedure
 Lab 4: Synchronous Sae Machine Design Summary: Design and implemen synchronous sae machine circuis and es hem wih simulaions in Cadence Viruoso. Learning Objecives: Pracice designing and simulaing digial
Lab 4: Synchronous Sae Machine Design Summary: Design and implemen synchronous sae machine circuis and es hem wih simulaions in Cadence Viruoso. Learning Objecives: Pracice designing and simulaing digial
WEEK-3 Recitation PHYS 131. of the projectile s velocity remains constant throughout the motion, since the acceleration a x
 WEEK-3 Reciaion PHYS 131 Ch. 3: FOC 1, 3, 4, 6, 14. Problems 9, 37, 41 & 71 and Ch. 4: FOC 1, 3, 5, 8. Problems 3, 5 & 16. Feb 8, 018 Ch. 3: FOC 1, 3, 4, 6, 14. 1. (a) The horizonal componen of he projecile
WEEK-3 Reciaion PHYS 131 Ch. 3: FOC 1, 3, 4, 6, 14. Problems 9, 37, 41 & 71 and Ch. 4: FOC 1, 3, 5, 8. Problems 3, 5 & 16. Feb 8, 018 Ch. 3: FOC 1, 3, 4, 6, 14. 1. (a) The horizonal componen of he projecile
Stability and Bifurcation in a Neural Network Model with Two Delays
 Inernaional Mahemaical Forum, Vol. 6, 11, no. 35, 175-1731 Sabiliy and Bifurcaion in a Neural Nework Model wih Two Delays GuangPing Hu and XiaoLing Li School of Mahemaics and Physics, Nanjing Universiy
Inernaional Mahemaical Forum, Vol. 6, 11, no. 35, 175-1731 Sabiliy and Bifurcaion in a Neural Nework Model wih Two Delays GuangPing Hu and XiaoLing Li School of Mahemaics and Physics, Nanjing Universiy
Biol. 356 Lab 8. Mortality, Recruitment, and Migration Rates
 Biol. 356 Lab 8. Moraliy, Recruimen, and Migraion Raes (modified from Cox, 00, General Ecology Lab Manual, McGraw Hill) Las week we esimaed populaion size hrough several mehods. One assumpion of all hese
Biol. 356 Lab 8. Moraliy, Recruimen, and Migraion Raes (modified from Cox, 00, General Ecology Lab Manual, McGraw Hill) Las week we esimaed populaion size hrough several mehods. One assumpion of all hese