Two Popular Bayesian Estimators: Particle and Kalman Filters. McGill COMP 765 Sept 14 th, 2017
|
|
|
- Stephany Miller
- 5 years ago
- Views:
Transcription
1 Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017
2 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, u z u x P u z u x z P Bayes z = observaion u = acion x = sae,,, 1 1 z u z u x P x Bel Markov,,, 1 1 u z u x P x z P Markov ,,,, dx u z u x P x u x P x z P ,,,,,,, dx u z u x P x u z u x P x z P Toal prob. Markov ,,,, dx z z u x P x u x P x z P
3 Discree Bayes Filer Algorihm 1. Algorihm Discree_Bayes_filer Belx,d : If d is a percepual daa iem z hen 4. For all x do For all x do Else if d is an acion daa iem u hen 10. For all x do Reurn Bel x Bel ' x P z x Bel x Bel' x Bel ' x 1 x' Bel ' x Bel ' x P x u, x' Bel x'

4 Piecewise Consan Belx
5 Problem Saemen Wha are represenaions for Belx and maching updae rules work well in pracice? Bel x P z x P x u, x 1 Bel x 1 dx 1 Desirable: Accuracy and correcness Time and space usage scales well wih size of sae and # dimensions Represen realisic range of moion and measuremen models
6 Par 1: Paricle Filers Inuiion: rack Belx wih adapively locaed discree samples Poenials: Beer accuracy/compuaion rade-off Paricles can ake shape of arbirary disribuions Uses: Indoor roboics Self driving cars Compuer vision General ool in learning

7

8 Inuiive Example: Localizing During Robocup
9 Disribuions Consider disribuions o each px zi only. Are hese relaed o our answer?
10 Disribuions Waned: samples disribued according o px z 1, z 2, z 3 10



11 This is Easy! We can draw samples from px z l by adding noise o he deecion parameers.
12 Imporance Sampling As seen, i is ofen easy o draw samples from one porion of our Bayes filer Main rick: imporance sampling, i.e. how o esimae properies/saisics of one disribuion f given samples from anoher disribuion g For example, suppose we wan o esimae he expeced value of f given only samples from g.
13 Imporance Sampling As seen, i is ofen easy o draw samples from one porion of our Bayes filer Main rick: imporance sampling, i.e. how o esimae properies/saisics of one disribuion f given samples from anoher disribuion g
14 Imporance Sampling As seen, i is ofen easy o draw samples from one porion of our Bayes filer Main rick: imporance sampling, i.e. how o esimae properies/saisics of one disribuion f given samples from anoher disribuion g Weighs describe he mismach beween he wo disribuions, i.e. how o reweigh samples o obain saisics of f from samples of g
15 Imporance Sampling for Robocup,...,,,...,, : Targe disribuion f n k k n z z z p x p x z p z z z x p Sampling disribuion g : l l l z p x p x z p z x p,...,,,...,, w : Imporanceweighs n l k k l l n z z z p x z p z p z x p z z z x p g f


16 Imporance Sampling Here are all of our px zi samples, now wih w aached no shown. If we re-draw from hese samples, weighed by w, we ge Weighed samples Afer resampling

17 Imporance Sampling for Bayes Filer Wha is are he proposal disribuion and weighing compuaions? Sample from propagaion, before updae Wan poserior belief afer updae Recall: weighing o remove sample bias

18 Imporance Sampling for Bayes Filer Wha is are he proposal disribuion and weighing compuaions? Sample from propagaion, before updae Wan poserior belief afer updae This algorihm is known as a paricle filer.
19 Paricle Filer Algorihm Acual observaion and conrol received
20 Paricle Filer Algorihm Paricle propagaion/predicion: noise needs o be added in order o make paricles differeniae from each oher. If propagaion is deerminisic hen paricles are going o collapse o a single paricle afer a few resampling seps.
21 Paricle Filer Algorihm Weigh compuaion as measuremen likelihood. For each paricle we compue he probabiliy of he acual observaion given he sae is a ha paricle.
22 Paricle Filer Algorihm Resampling sep Noe: paricle deprivaion heurisics are no shown here
23 Paricle Filer Algorihm Resampling: The paricle locaions now have a chance o adap according o he weighs. More likely paricles persis, while unlikely choices are removed.

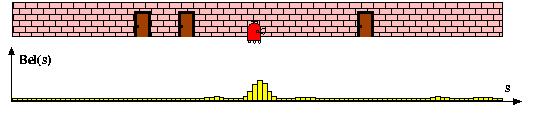
24 Examples: 1D Localizaion

25 Examples: 1D Localizaion
26 Resampling Given: Se S of weighed samples. Waned : Random sample, where he probabiliy of drawing x i is given by w i. Typically done n imes wih replacemen o generae new sample se S.
27 Resampling Carefully W n-1 w n w 1 w 2 W n-1 w n w 1 w 2 w 3 w 3 Roulee wheel Binary search, n log n Sochasic universal sampling Sysemaic resampling Linear ime complexiy Easy o implemen, low variance
28 Resampling Algorihm 1. Algorihm sysemaic_resamplings,n: 1 2. S', c1 w 3. For i 2n Generae cdf i 4. ci ci 1 w 1 5. u ~ U]0, n ], i 1 Iniialize hreshold 1 6. For j 1n Draw samples 7. While u j c i Skip unil nex hreshold reached 8. i i 1 9. i 1 S' S' x, n Inser 10. u u 1 n Incremen hreshold j1 11. Reurn S j Also called sochasic universal sampling
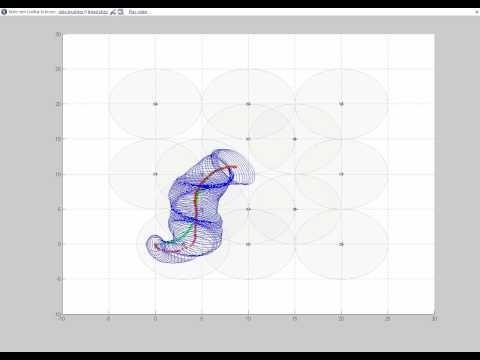
29 Paricle Moion Model Sar
30 Proximiy Sensor Model Reminder Laser sensor Sonar sensor
31 31
32 32
33 33
34 34
35 35
36 36
37 37
38 38
39 39
40 40
41 41
42 42
43 43
44 44
45 45
46 46
47 Paricle Filer Summary Very flexible ool as we ge o make our choice of proposal disribuions as long as we can properly compue imporance weigh Performance is guaraneed given infinie samples! The paricle cloud and is weighs represen our disribuion, bu making decisions can sill be complex: Ac based on he mos likely paricle Ac using a weighed summaion over paricles Ac conservaively, accouning for he wors paricle In pracice, he number of paricles required o perform well scales wih he problem complexiy and his can be hard o measure
48 Par 2: Kalman Filers Inuiion: rack Belx wih a Gaussian disribuion, simplifying assumpions o ensure updaes are all possible Payoffs: Coninuous represenaion Efficien compuaion Uses: Rockery Mobile devices Drones GPS he lis is very long
49 Par 2: Kalman Filers Inuiion: rack Belx wih a Gaussian disribuion, simplifying assumpions o ensure updaes are all possible Payoffs: Coninuous represenaion Efficien compuaion Uses: Rockery Mobile devices Drones GPS he lis is very long

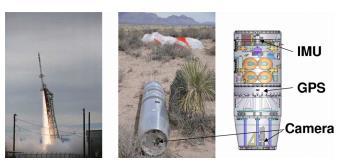
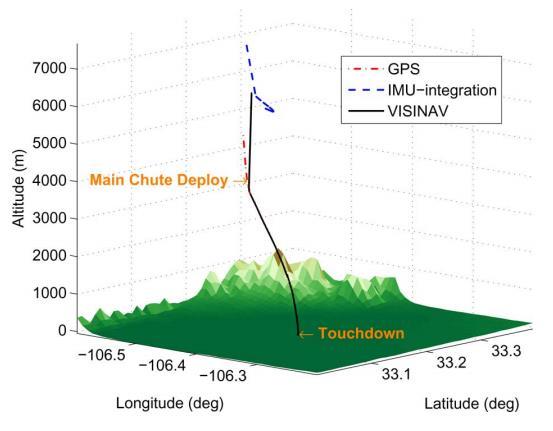
50 Example: Landing on mars
51 Kalman Filer: Approach Kalman Filer: an insance of Bayes Filer Linear dynamics wih Gaussian noise Linear observaions wih Gaussian noise Iniial belief is Gaussian
52 Kalman Filer: assumpions Two assumpions inheried from Bayes Filer Linear dynamics and observaion models Iniial belief is Gaussian Noise variables and iniial sae are joinly Gaussian and independen Noise variables are independen and idenically disribued Noise variables are independen and idenically disribued
53 Kalman Filer: why so many assumpions? Two assumpions inheried from Bayes Filer Linear dynamics and observaion models Iniial belief is Gaussian Noise variables and iniial sae Wihou lineariy here is no closed-form soluion for he poserior belief in he Bayes Filer. Recall ha if X is Gaussian hen Y=AX+b is also Gaussian. This is no rue in general if Y=hX. Also, we will see laer ha applying Bayes rule o a Gaussian prior and a Gaussian measuremen likelihood resuls in a Gaussian poserior. are joinly Gaussian and independen Noise variables are independen and idenically disribued Noise variables are independen and idenically disribued
54 Kalman Filer: why so many assumpions? Two assumpions inheried from Bayes Filer Linear dynamics and observaion models Iniial belief is Gaussian Noise variables and iniial sae This resuls in he belief remaining Gaussian afer each propagaion and updae sep. This means ha we only have o worry abou how he mean and he covariance of he belief evolve recursively wih each predicion sep and updae sep COOL! are joinly Gaussian and independen Noise variables are independen and idenically disribued Noise variables are independen and idenically disribued
55 Kalman Filer: why so many assumpions? Two assumpions inheried from Bayes Filer Linear dynamics and observaion models Iniial belief is Gaussian Noise variables and iniial sae are joinly Gaussian and independen Noise variables are independen and idenically disribued Noise variables are independen and idenically disribued This makes he recursive updaes of he mean and covariance much simpler.
56 Assumpions guaranee ha if he prior belief before he predicion sep is Gaussian Kalman Filer: an insance of Bayes Filer hen he prior belief afer he predicion sep will be Gaussian and he poserior belief afer he updae sep will be Gaussian.

57 Kalman Filer: an insance of Bayes Filer Belief afer predicion sep o simplify noaion So, under he Kalman Filer assumpions we ge Noaion: esimae a ime given hisory of observaions and conrols up o ime -1

58 Kalman Filer: an insance of Bayes Filer So, under he Kalman Filer assumpions we ge Two main quesions: 1. How o ge predicion mean and covariance from prior mean and covariance? 2. How o ge poserior mean and covariance from predicion mean and covariance? These quesions were answered in he 1960s. The resuling algorihm was used in he Apollo missions o he moon, and in almos every sysem in which here is a noisy sensor involved COOL!
59 Kalman Filer wih 1D sae Le s sar wih he updae sep recursion. Here s an example: Suppose your measuremen model is wih Suppose your belief afer he predicion sep is Suppose your firs noisy measuremen is Q: Wha is he mean and covariance of?
60 Kalman Filer wih 1D sae: he updae sep From Bayes Filer we ge so
61 Kalman Filer wih 1D sae: he updae sep From Bayes Filer we ge so Predicion residual/error beween acual observaion and expeced observaion. You expeced he measured mean o be 0, according o your predicion prior, bu you acually observed 5. The smaller his predicion error is he beer your esimae will be, or he beer i will agree wih he measuremens.
62 Kalman Filer wih 1D sae: he updae sep From Bayes Filer we ge so Kalman Gain: specifies how much effec will he measuremen have in he poserior, compared o he predicion prior. Which one do you rus more, your prior, or your measuremen?
63 Kalman Filer wih 1D sae: he updae sep From Bayes Filer we ge so The measuremen is more confiden lower variance han he prior, so he poserior mean is going o be closer o 5 han o 0.
64 Kalman Filer wih 1D sae: he updae sep From Bayes Filer we ge so No maer wha happens, he variance of he poserior is going o be reduced. I.e. new measuremen increases confidence no maer how noisy i is.
65 Kalman Filer wih 1D sae: he updae sep From Bayes Filer we ge so In fac you can wrie his as so and I.e. he poserior is more confiden han boh he prior and he measuremen.

66 Kalman Filer wih 1D sae: he updae sep From Bayes Filer we ge so In his example:


67 Kalman Filer wih 1D sae: he updae sep Anoher example:
68 Kalman Filer wih 1D sae: he updae sep Take-home message: new observaions, no maer how noisy, always reduce uncerainy in he poserior. The mean of he poserior, on he oher hand, only changes when here is a nonzero predicion residual.
69 Kalman Filer wih 1D sae: he propagaion/predicion sep Suppose ha he dynamics model is and you applied he command. Then Recall: his noaion means expeced value wih respec o condiional expecaion, i.e Conrol is a consan wih respec o he disribuion Dynamics noise is zero mean, and independen of observaions and conrols
70 Kalman Filer wih 1D sae: he propagaion/predicion sep Suppose ha he dynamics model is and you applied he command. Then Recall: his noaion means covariance wih respec o condiional expecaion, i.e
71 Kalman Filer wih 1D sae: he propagaion/predicion sep Suppose ha he dynamics model is and you applied he command. Then Recall: covariance neglecs addiion of consan erms, i.e. CovX+b = CovX
72 Kalman Filer wih 1D sae: he propagaion/predicion sep Suppose ha he dynamics model is and you applied he command. Then Recall: CovX+Y=CovX+CovY-2CovX,Y Recall: we denoe CovX,X=CovX as a shorhand
73 Kalman Filer wih 1D sae: he propagaion/predicion sep Suppose ha he dynamics model is and you applied he command. Then We assumed dynamics noise is independen of pas measuremen and conrols We assumed noise variables are independen of sae. So his covariance is zero.

74 Kalman Filer wih 1D sae: he propagaion/predicion sep Suppose ha he dynamics model is and you applied he command. Then

75 Kalman Filer wih 1D sae: he propagaion/predicion sep Suppose ha he dynamics model is and you applied he command. Then

76 Kalman Filer wih 1D sae: he propagaion/predicion sep Suppose ha he dynamics model is and you applied he command. Then
77 Kalman Filer wih 1D sae: he propagaion/predicion sep Take home message: uncerainy increases afer he predicion sep, because we are speculaing abou he fuure.
78 Kalman Filer Algorihm 1. Algorihm Kalman_filer m -1, S -1, u, z : 2. Predicion: Correcion: Reurn m, S u A B 1 m m T R A A S S 1 1 S S T T Q C C C K C z K m m m C K I S S
79 The Predicion-Correcion-Cycle S S T R A A B u A x bel 1 1 m m 2, ac a b u a x bel m m Predicion
80 The Predicion-Correcion-Cycle 1, S S S S T T Q C C C K K C I C z K x bel m m m 2, , 1 obs K K z K x bel m m m Correcion
81 The Predicion-Correcion-Cycle 1, S S S S T T Q C C C K K C I C z K x bel m m m 2, , 1 obs K K z K x bel m m m S S T R A A B u A x bel 1 1 m m 2, ac a b u a x bel m m Correcion Predicion
82
83 Kalman Filer Summary Highly efficien: Polynomial in measuremen dimensionaliy k and sae dimensionaliy n: Ok n 2 Opimal for linear Gaussian sysems! Mos roboics sysems are nonlinear!
CSE-571 Robotics. Sample-based Localization (sonar) Motivation. Bayes Filter Implementations. Particle filters. Density Approximation
 Motivation. Bayes Filter Implementations. Particle filters. Density Approximation") Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
CSE-473. A Gentle Introduction to Particle Filters
 CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
Probabilistic Robotics
 Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Sequential Importance Resampling (SIR) Particle Filter
 Particle Filter") Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Introduction to Mobile Robotics
 Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Estimation of Poses with Particle Filters
 Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Using the Kalman filter Extended Kalman filter
 Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Announcements. Recap: Filtering. Recap: Reasoning Over Time. Example: State Representations for Robot Localization. Particle Filtering
 Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Anno accademico 2006/2007. Davide Migliore
 Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
AUTONOMOUS SYSTEMS. Probabilistic Robotics Basics Kalman Filters Particle Filters. Sebastian Thrun
 AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
7630 Autonomous Robotics Probabilistic Localisation
 7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
State-Space Models. Initialization, Estimation and Smoothing of the Kalman Filter
 Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
CS 4495 Computer Vision Tracking 1- Kalman,Gaussian
 CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
SEIF, EnKF, EKF SLAM. Pieter Abbeel UC Berkeley EECS
 SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
Data Fusion using Kalman Filter. Ioannis Rekleitis
 Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Robot Motion Model EKF based Localization EKF SLAM Graph SLAM
 Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
2016 Possible Examination Questions. Robotics CSCE 574
 206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
Notes on Kalman Filtering
 Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
INTRODUCTION TO MACHINE LEARNING 3RD EDITION
 ETHEM ALPAYDIN The MIT Press, 2014 Lecure Slides for INTRODUCTION TO MACHINE LEARNING 3RD EDITION alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/~ehem/i2ml3e CHAPTER 2: SUPERVISED LEARNING Learning a Class
ETHEM ALPAYDIN The MIT Press, 2014 Lecure Slides for INTRODUCTION TO MACHINE LEARNING 3RD EDITION alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/~ehem/i2ml3e CHAPTER 2: SUPERVISED LEARNING Learning a Class
Written HW 9 Sol. CS 188 Fall Introduction to Artificial Intelligence
 CS 188 Fall 2018 Inroducion o Arificial Inelligence Wrien HW 9 Sol. Self-assessmen due: Tuesday 11/13/2018 a 11:59pm (submi via Gradescope) For he self assessmen, fill in he self assessmen boxes in your
CS 188 Fall 2018 Inroducion o Arificial Inelligence Wrien HW 9 Sol. Self-assessmen due: Tuesday 11/13/2018 a 11:59pm (submi via Gradescope) For he self assessmen, fill in he self assessmen boxes in your
Georey E. Hinton. University oftoronto. Technical Report CRG-TR February 22, Abstract
 Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Tracking. Announcements
 Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Recursive Bayes Filtering Advanced AI
 Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Learning a Class from Examples. Training set X. Class C 1. Class C of a family car. Output: Input representation: x 1 : price, x 2 : engine power
 Alpaydin Chaper, Michell Chaper 7 Alpaydin slides are in urquoise. Ehem Alpaydin, copyrigh: The MIT Press, 010. alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/ ehem/imle All oher slides are based on Michell.
Alpaydin Chaper, Michell Chaper 7 Alpaydin slides are in urquoise. Ehem Alpaydin, copyrigh: The MIT Press, 010. alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/ ehem/imle All oher slides are based on Michell.
Uncertainty & Localization I
 Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Self assessment due: Monday 4/29/2019 at 11:59pm (submit via Gradescope)
") CS 188 Spring 2019 Inroducion o Arificial Inelligence Wrien HW 10 Due: Monday 4/22/2019 a 11:59pm (submi via Gradescope). Leave self assessmen boxes blank for his due dae. Self assessmen due: Monday 4/29/2019
CS 188 Spring 2019 Inroducion o Arificial Inelligence Wrien HW 10 Due: Monday 4/22/2019 a 11:59pm (submi via Gradescope). Leave self assessmen boxes blank for his due dae. Self assessmen due: Monday 4/29/2019
Learning a Class from Examples. Training set X. Class C 1. Class C of a family car. Output: Input representation: x 1 : price, x 2 : engine power
 Alpaydin Chaper, Michell Chaper 7 Alpaydin slides are in urquoise. Ehem Alpaydin, copyrigh: The MIT Press, 010. alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/ ehem/imle All oher slides are based on Michell.
Alpaydin Chaper, Michell Chaper 7 Alpaydin slides are in urquoise. Ehem Alpaydin, copyrigh: The MIT Press, 010. alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/ ehem/imle All oher slides are based on Michell.
Localization and Map Making
 Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
3.1 More on model selection
 3. More on Model selecion 3. Comparing models AIC, BIC, Adjused R squared. 3. Over Fiing problem. 3.3 Sample spliing. 3. More on model selecion crieria Ofen afer model fiing you are lef wih a handful of
3. More on Model selecion 3. Comparing models AIC, BIC, Adjused R squared. 3. Over Fiing problem. 3.3 Sample spliing. 3. More on model selecion crieria Ofen afer model fiing you are lef wih a handful of
Book Corrections for Optimal Estimation of Dynamic Systems, 2 nd Edition
 Boo Correcions for Opimal Esimaion of Dynamic Sysems, nd Ediion John L. Crassidis and John L. Junins November 17, 017 Chaper 1 This documen provides correcions for he boo: Crassidis, J.L., and Junins,
Boo Correcions for Opimal Esimaion of Dynamic Sysems, nd Ediion John L. Crassidis and John L. Junins November 17, 017 Chaper 1 This documen provides correcions for he boo: Crassidis, J.L., and Junins,
EKF SLAM vs. FastSLAM A Comparison
 vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
Augmented Reality II - Kalman Filters - Gudrun Klinker May 25, 2004
 Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Diebold, Chapter 7. Francis X. Diebold, Elements of Forecasting, 4th Edition (Mason, Ohio: Cengage Learning, 2006). Chapter 7. Characterizing Cycles
. Chapter 7. Characterizing Cycles") Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
Block Diagram of a DCS in 411
 Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
m = 41 members n = 27 (nonfounders), f = 14 (founders) 8 markers from chromosome 19
, f = 14 (founders) 8 markers from chromosome 19") Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
מקורות לחומר בשיעור ספר הלימוד: Forsyth & Ponce מאמרים שונים חומר באינטרנט! פרק פרק 18
 עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
Temporal probability models
 Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Inventory Analysis and Management. Multi-Period Stochastic Models: Optimality of (s, S) Policy for K-Convex Objective Functions
 Policy for K-Convex Objective Functions") Muli-Period Sochasic Models: Opimali of (s, S) Polic for -Convex Objecive Funcions Consider a seing similar o he N-sage newsvendor problem excep ha now here is a fixed re-ordering cos (> 0) for each (re-)order.
Muli-Period Sochasic Models: Opimali of (s, S) Polic for -Convex Objecive Funcions Consider a seing similar o he N-sage newsvendor problem excep ha now here is a fixed re-ordering cos (> 0) for each (re-)order.
1. Consider a pure-exchange economy with stochastic endowments. The state of the economy
 Answer 4 of he following 5 quesions. 1. Consider a pure-exchange economy wih sochasic endowmens. The sae of he economy in period, 0,1,..., is he hisory of evens s ( s0, s1,..., s ). The iniial sae is given.
Answer 4 of he following 5 quesions. 1. Consider a pure-exchange economy wih sochasic endowmens. The sae of he economy in period, 0,1,..., is he hisory of evens s ( s0, s1,..., s ). The iniial sae is given.
Ensamble methods: Bagging and Boosting
 Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
GMM - Generalized Method of Moments
 GMM - Generalized Mehod of Momens Conens GMM esimaion, shor inroducion 2 GMM inuiion: Maching momens 2 3 General overview of GMM esimaion. 3 3. Weighing marix...........................................
GMM - Generalized Mehod of Momens Conens GMM esimaion, shor inroducion 2 GMM inuiion: Maching momens 2 3 General overview of GMM esimaion. 3 3. Weighing marix...........................................
Temporal probability models. Chapter 15, Sections 1 5 1
 Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Hidden Markov Models
 Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Probabilistic Robotics Sebastian Thrun-- Stanford
 robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
Localization. Mobile robot localization is the problem of determining the pose of a robot relative to a given map of the environment.
 Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Comparing Means: t-tests for One Sample & Two Related Samples
 Comparing Means: -Tess for One Sample & Two Relaed Samples Using he z-tes: Assumpions -Tess for One Sample & Two Relaed Samples The z-es (of a sample mean agains a populaion mean) is based on he assumpion
Comparing Means: -Tess for One Sample & Two Relaed Samples Using he z-tes: Assumpions -Tess for One Sample & Two Relaed Samples The z-es (of a sample mean agains a populaion mean) is based on he assumpion
Object Tracking. Computer Vision Jia-Bin Huang, Virginia Tech. Many slides from D. Hoiem
 Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
1 Review of Zero-Sum Games
 COS 5: heoreical Machine Learning Lecurer: Rob Schapire Lecure #23 Scribe: Eugene Brevdo April 30, 2008 Review of Zero-Sum Games Las ime we inroduced a mahemaical model for wo player zero-sum games. Any
COS 5: heoreical Machine Learning Lecurer: Rob Schapire Lecure #23 Scribe: Eugene Brevdo April 30, 2008 Review of Zero-Sum Games Las ime we inroduced a mahemaical model for wo player zero-sum games. Any
T L. t=1. Proof of Lemma 1. Using the marginal cost accounting in Equation(4) and standard arguments. t )+Π RB. t )+K 1(Q RB
 and standard arguments. t )+Π RB. t )+K 1(Q RB") Elecronic Companion EC.1. Proofs of Technical Lemmas and Theorems LEMMA 1. Le C(RB) be he oal cos incurred by he RB policy. Then we have, T L E[C(RB)] 3 E[Z RB ]. (EC.1) Proof of Lemma 1. Using he marginal
Elecronic Companion EC.1. Proofs of Technical Lemmas and Theorems LEMMA 1. Le C(RB) be he oal cos incurred by he RB policy. Then we have, T L E[C(RB)] 3 E[Z RB ]. (EC.1) Proof of Lemma 1. Using he marginal
Ensamble methods: Boosting
 Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room
Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room
5. Stochastic processes (1)
") Lec05.pp S-38.45 - Inroducion o Teleraffic Theory Spring 2005 Conens Basic conceps Poisson process 2 Sochasic processes () Consider some quaniy in a eleraffic (or any) sysem I ypically evolves in ime randomly
Lec05.pp S-38.45 - Inroducion o Teleraffic Theory Spring 2005 Conens Basic conceps Poisson process 2 Sochasic processes () Consider some quaniy in a eleraffic (or any) sysem I ypically evolves in ime randomly
Some Basic Information about M-S-D Systems
 Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Stochastic models and their distributions
 Sochasic models and heir disribuions Couning cusomers Suppose ha n cusomers arrive a a grocery a imes, say T 1,, T n, each of which akes any real number in he inerval (, ) equally likely The values T 1,,
Sochasic models and heir disribuions Couning cusomers Suppose ha n cusomers arrive a a grocery a imes, say T 1,, T n, each of which akes any real number in he inerval (, ) equally likely The values T 1,,
2.160 System Identification, Estimation, and Learning. Lecture Notes No. 8. March 6, 2006
 2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
Chapter 14. (Supplementary) Bayesian Filtering for State Estimation of Dynamic Systems
 Bayesian Filtering for State Estimation of Dynamic Systems") Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
An recursive analytical technique to estimate time dependent physical parameters in the presence of noise processes
 WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
Subway stations energy and air quality management
 Subway saions energy and air qualiy managemen wih sochasic opimizaion Trisan Rigau 1,2,4, Advisors: P. Carpenier 3, J.-Ph. Chancelier 2, M. De Lara 2 EFFICACITY 1 CERMICS, ENPC 2 UMA, ENSTA 3 LISIS, IFSTTAR
Subway saions energy and air qualiy managemen wih sochasic opimizaion Trisan Rigau 1,2,4, Advisors: P. Carpenier 3, J.-Ph. Chancelier 2, M. De Lara 2 EFFICACITY 1 CERMICS, ENPC 2 UMA, ENSTA 3 LISIS, IFSTTAR
Linear Gaussian State Space Models
 Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Kriging Models Predicting Atrazine Concentrations in Surface Water Draining Agricultural Watersheds
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
EE 315 Notes. Gürdal Arslan CLASS 1. (Sections ) What is a signal?
 What is a signal?") EE 35 Noes Gürdal Arslan CLASS (Secions.-.2) Wha is a signal? In his class, a signal is some funcion of ime and i represens how some physical quaniy changes over some window of ime. Examples: velociy of
EE 35 Noes Gürdal Arslan CLASS (Secions.-.2) Wha is a signal? In his class, a signal is some funcion of ime and i represens how some physical quaniy changes over some window of ime. Examples: velociy of
Lecture 3: Exponential Smoothing
 NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
Financial Econometrics Kalman Filter: some applications to Finance University of Evry - Master 2
 Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
ACE 562 Fall Lecture 5: The Simple Linear Regression Model: Sampling Properties of the Least Squares Estimators. by Professor Scott H.
 ACE 56 Fall 005 Lecure 5: he Simple Linear Regression Model: Sampling Properies of he Leas Squares Esimaors by Professor Sco H. Irwin Required Reading: Griffihs, Hill and Judge. "Inference in he Simple
ACE 56 Fall 005 Lecure 5: he Simple Linear Regression Model: Sampling Properies of he Leas Squares Esimaors by Professor Sco H. Irwin Required Reading: Griffihs, Hill and Judge. "Inference in he Simple
Econ107 Applied Econometrics Topic 7: Multicollinearity (Studenmund, Chapter 8)
") I. Definiions and Problems A. Perfec Mulicollineariy Econ7 Applied Economerics Topic 7: Mulicollineariy (Sudenmund, Chaper 8) Definiion: Perfec mulicollineariy exiss in a following K-variable regression
I. Definiions and Problems A. Perfec Mulicollineariy Econ7 Applied Economerics Topic 7: Mulicollineariy (Sudenmund, Chaper 8) Definiion: Perfec mulicollineariy exiss in a following K-variable regression
Transform Techniques. Moment Generating Function
 Transform Techniques A convenien way of finding he momens of a random variable is he momen generaing funcion (MGF). Oher ransform echniques are characerisic funcion, z-ransform, and Laplace ransform. Momen
Transform Techniques A convenien way of finding he momens of a random variable is he momen generaing funcion (MGF). Oher ransform echniques are characerisic funcion, z-ransform, and Laplace ransform. Momen
R t. C t P t. + u t. C t = αp t + βr t + v t. + β + w t
 Exercise 7 C P = α + β R P + u C = αp + βr + v (a) (b) C R = α P R + β + w (c) Assumpions abou he disurbances u, v, w : Classical assumions on he disurbance of one of he equaions, eg. on (b): E(v v s P,
Exercise 7 C P = α + β R P + u C = αp + βr + v (a) (b) C R = α P R + β + w (c) Assumpions abou he disurbances u, v, w : Classical assumions on he disurbance of one of he equaions, eg. on (b): E(v v s P,
Understanding the asymptotic behaviour of empirical Bayes methods
 Undersanding he asympoic behaviour of empirical Bayes mehods Boond Szabo, Aad van der Vaar and Harry van Zanen EURANDOM, 11.10.2011. Conens 2/20 Moivaion Nonparameric Bayesian saisics Signal in Whie noise
Undersanding he asympoic behaviour of empirical Bayes mehods Boond Szabo, Aad van der Vaar and Harry van Zanen EURANDOM, 11.10.2011. Conens 2/20 Moivaion Nonparameric Bayesian saisics Signal in Whie noise
Math 10B: Mock Mid II. April 13, 2016
 Name: Soluions Mah 10B: Mock Mid II April 13, 016 1. ( poins) Sae, wih jusificaion, wheher he following saemens are rue or false. (a) If a 3 3 marix A saisfies A 3 A = 0, hen i canno be inverible. True.
Name: Soluions Mah 10B: Mock Mid II April 13, 016 1. ( poins) Sae, wih jusificaion, wheher he following saemens are rue or false. (a) If a 3 3 marix A saisfies A 3 A = 0, hen i canno be inverible. True.
Unit Root Time Series. Univariate random walk
 Uni Roo ime Series Univariae random walk Consider he regression y y where ~ iid N 0, he leas squares esimae of is: ˆ yy y y yy Now wha if = If y y hen le y 0 =0 so ha y j j If ~ iid N 0, hen y ~ N 0, he
Uni Roo ime Series Univariae random walk Consider he regression y y where ~ iid N 0, he leas squares esimae of is: ˆ yy y y yy Now wha if = If y y hen le y 0 =0 so ha y j j If ~ iid N 0, hen y ~ N 0, he
Approximation Algorithms for Unique Games via Orthogonal Separators
 Approximaion Algorihms for Unique Games via Orhogonal Separaors Lecure noes by Konsanin Makarychev. Lecure noes are based on he papers [CMM06a, CMM06b, LM4]. Unique Games In hese lecure noes, we define
Approximaion Algorihms for Unique Games via Orhogonal Separaors Lecure noes by Konsanin Makarychev. Lecure noes are based on he papers [CMM06a, CMM06b, LM4]. Unique Games In hese lecure noes, we define
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM
 WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
Fundamental Problems In Robotics
 Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Planning in POMDPs. Dominik Schoenberger Abstract
 Planning in POMDPs Dominik Schoenberger d.schoenberger@sud.u-darmsad.de Absrac This documen briefly explains wha a Parially Observable Markov Decision Process is. Furhermore i inroduces he differen approaches
Planning in POMDPs Dominik Schoenberger d.schoenberger@sud.u-darmsad.de Absrac This documen briefly explains wha a Parially Observable Markov Decision Process is. Furhermore i inroduces he differen approaches
Affine term structure models
 Affine erm srucure models A. Inro o Gaussian affine erm srucure models B. Esimaion by minimum chi square (Hamilon and Wu) C. Esimaion by OLS (Adrian, Moench, and Crump) D. Dynamic Nelson-Siegel model (Chrisensen,
Affine erm srucure models A. Inro o Gaussian affine erm srucure models B. Esimaion by minimum chi square (Hamilon and Wu) C. Esimaion by OLS (Adrian, Moench, and Crump) D. Dynamic Nelson-Siegel model (Chrisensen,
UNIVERSITY OF CALIFORNIA College of Engineering Department of Electrical Engineering and Computer Sciences EECS 121 FINAL EXAM
 Name: UNIVERSIY OF CALIFORNIA College of Engineering Deparmen of Elecrical Engineering and Compuer Sciences Professor David se EECS 121 FINAL EXAM 21 May 1997, 5:00-8:00 p.m. Please wrie answers on blank
Name: UNIVERSIY OF CALIFORNIA College of Engineering Deparmen of Elecrical Engineering and Compuer Sciences Professor David se EECS 121 FINAL EXAM 21 May 1997, 5:00-8:00 p.m. Please wrie answers on blank
References are appeared in the last slide. Last update: (1393/08/19)
") SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
Expert Advice for Amateurs
 Exper Advice for Amaeurs Ernes K. Lai Online Appendix - Exisence of Equilibria The analysis in his secion is performed under more general payoff funcions. Wihou aking an explici form, he payoffs of he
Exper Advice for Amaeurs Ernes K. Lai Online Appendix - Exisence of Equilibria The analysis in his secion is performed under more general payoff funcions. Wihou aking an explici form, he payoffs of he
T. J. HOLMES AND T. J. KEHOE INTERNATIONAL TRADE AND PAYMENTS THEORY FALL 2011 EXAMINATION
 ECON 841 T. J. HOLMES AND T. J. KEHOE INTERNATIONAL TRADE AND PAYMENTS THEORY FALL 211 EXAMINATION This exam has wo pars. Each par has wo quesions. Please answer one of he wo quesions in each par for a
ECON 841 T. J. HOLMES AND T. J. KEHOE INTERNATIONAL TRADE AND PAYMENTS THEORY FALL 211 EXAMINATION This exam has wo pars. Each par has wo quesions. Please answer one of he wo quesions in each par for a
In this chapter the model of free motion under gravity is extended to objects projected at an angle. When you have completed it, you should
 Cambridge Universiy Press 978--36-60033-7 Cambridge Inernaional AS and A Level Mahemaics: Mechanics Coursebook Excerp More Informaion Chaper The moion of projeciles In his chaper he model of free moion
Cambridge Universiy Press 978--36-60033-7 Cambridge Inernaional AS and A Level Mahemaics: Mechanics Coursebook Excerp More Informaion Chaper The moion of projeciles In his chaper he model of free moion
Online Convex Optimization Example And Follow-The-Leader
 CSE599s, Spring 2014, Online Learning Lecure 2-04/03/2014 Online Convex Opimizaion Example And Follow-The-Leader Lecurer: Brendan McMahan Scribe: Sephen Joe Jonany 1 Review of Online Convex Opimizaion
CSE599s, Spring 2014, Online Learning Lecure 2-04/03/2014 Online Convex Opimizaion Example And Follow-The-Leader Lecurer: Brendan McMahan Scribe: Sephen Joe Jonany 1 Review of Online Convex Opimizaion
An EM algorithm for maximum likelihood estimation given corrupted observations. E. E. Holmes, National Marine Fisheries Service
 An M algorihm maimum likelihood esimaion given corruped observaions... Holmes Naional Marine Fisheries Service Inroducion M algorihms e likelihood esimaion o cases wih hidden saes such as when observaions
An M algorihm maimum likelihood esimaion given corruped observaions... Holmes Naional Marine Fisheries Service Inroducion M algorihms e likelihood esimaion o cases wih hidden saes such as when observaions
A Bayesian Approach to Spectral Analysis
 Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
Tom Heskes and Onno Zoeter. Presented by Mark Buller
 Tom Heskes and Onno Zoeer Presened by Mark Buller Dynamic Bayesian Neworks Direced graphical models of sochasic processes Represen hidden and observed variables wih differen dependencies Generalize Hidden
Tom Heskes and Onno Zoeer Presened by Mark Buller Dynamic Bayesian Neworks Direced graphical models of sochasic processes Represen hidden and observed variables wih differen dependencies Generalize Hidden
Lecture 2-1 Kinematics in One Dimension Displacement, Velocity and Acceleration Everything in the world is moving. Nothing stays still.
 Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
IB Physics Kinematics Worksheet
 IB Physics Kinemaics Workshee Wrie full soluions and noes for muliple choice answers. Do no use a calculaor for muliple choice answers. 1. Which of he following is a correc definiion of average acceleraion?
IB Physics Kinemaics Workshee Wrie full soluions and noes for muliple choice answers. Do no use a calculaor for muliple choice answers. 1. Which of he following is a correc definiion of average acceleraion?
An introduction to the theory of SDDP algorithm
 An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
Speech and Language Processing
 Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Lecture 2 April 04, 2018
 Sas 300C: Theory of Saisics Spring 208 Lecure 2 April 04, 208 Prof. Emmanuel Candes Scribe: Paulo Orensein; edied by Sephen Baes, XY Han Ouline Agenda: Global esing. Needle in a Haysack Problem 2. Threshold
Sas 300C: Theory of Saisics Spring 208 Lecure 2 April 04, 208 Prof. Emmanuel Candes Scribe: Paulo Orensein; edied by Sephen Baes, XY Han Ouline Agenda: Global esing. Needle in a Haysack Problem 2. Threshold
Solutions Problem Set 3 Macro II (14.452)
") Soluions Problem Se 3 Macro II (14.452) Francisco A. Gallego 04/27/2005 1 Q heory of invesmen in coninuous ime and no uncerainy Consider he in nie horizon model of a rm facing adjusmen coss o invesmen.
Soluions Problem Se 3 Macro II (14.452) Francisco A. Gallego 04/27/2005 1 Q heory of invesmen in coninuous ime and no uncerainy Consider he in nie horizon model of a rm facing adjusmen coss o invesmen.
Lecture Notes 2. The Hilbert Space Approach to Time Series
 Time Series Seven N. Durlauf Universiy of Wisconsin. Basic ideas Lecure Noes. The Hilber Space Approach o Time Series The Hilber space framework provides a very powerful language for discussing he relaionship
Time Series Seven N. Durlauf Universiy of Wisconsin. Basic ideas Lecure Noes. The Hilber Space Approach o Time Series The Hilber space framework provides a very powerful language for discussing he relaionship
Deep Learning: Theory, Techniques & Applications - Recurrent Neural Networks -
 Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics
Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics