Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
|
|
|
- Maximilian Berry
- 6 years ago
- Views:
Transcription


1 Tracking Man slides adaped from Krisen Grauman Deva Ramanan

2 Coures G. Hager

3 Coures G. Hager J. Kosecka cs3b







4 Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image differencing Moion hisor im. Segmenaion Validaion Skin color deecor Moion presence Skin color presence RGB o HSV convers. Hue-saura. Limier Big conour presence Skin color binar im. Image closing Average ravelled disance Segmenaion Adapaion Coninuous adapaion Moion iniializaion J. Kosecka cs3b Tracking Disance scoring Conour o arge assignmen

5 Coures G. Hager
6 Tracking wih dnamics Ke idea: Given a model of epeced moion predic where objecs will occur in ne frame even before seeing he image Resric search for he objec Improved esimaes since measuremen noise is reduced b rajecor smoohness
7 General model for racking The moving objec of ineres is characerized b an underling sae Sae gives rise o measuremens or observaions Y A each ime he sae changes o and we ge a new observaion Y Y Y Y
8 Seps of racking redicion: Wha is he ne sae of he objec given pas measuremens? Y Y
9 Seps of racking redicion: Wha is he ne sae of he objec given pas measuremens? Y Y Correcion: Compue an updaed esimae of he sae from predicion and measuremens Y Y Y
10 Seps of racking redicion: Wha is he ne sae of he objec given pas measuremens? Y Y Correcion: Compue an updaed esimae of he sae from predicion and measuremens Y Y Y Tracking can be seen as he process of propagaing he poserior disribuion of sae given measuremens across ime
11 Simplifing assumpions Onl he immediae pas maers dnamics model
12 Simplifing assumpions Onl he immediae pas maers Measuremens depend onl on he curren sae Y Y Y Y dnamics model observaion model
13 Simplifing assumpions Onl he immediae pas maers Measuremens depend onl on he curren sae Y Y Y Y dnamics model observaion model - Y Y Y - Y
14 Tracking as inducion Base case: Assume we have iniial prior ha predics sae in absence of an evidence: A he firs frame correc his given he value of Y
15 Tracking as inducion Base case: Assume we have iniial prior ha predics sae in absence of an evidence: A he firs frame correc his given he value of Y Y





16 Tracking as inducion Base case: Assume we have iniial prior ha predics sae in absence of an evidence: A he firs frame correc his given he value of Y Given correced esimae for frame : redic for frame + Correc for frame + predic " correc "
17 redicion redicion involves represening given
18 redicion redicion involves represening given d d d Law of oal probabili
19 redicion redicion involves represening given d d d Condiioning on
20 redicion redicion involves represening given d d d Independence assumpion
21 redicion redicion involves represening given d d d dnamics model correced esimae from previous sep
22 Correcion Correcion involves compuing given prediced value
23 Correcion Correcion involves compuing given prediced value d Baes rule
24 Correcion Correcion involves compuing given prediced value d Independence assumpion observaion depends onl on sae
25 Correcion Correcion involves compuing given prediced value d Condiioning on
26 Correcion Correcion involves compuing given prediced value d observaion model prediced esimae normalizaion facor
27 Summar: redicion and correcion redicion: Correcion: d d dnamics model correced esimae from previous sep observaion model prediced esimae
28 Baes Filer Definiion Environmen sae Measuremen z Can we calculae p z z z u u u?
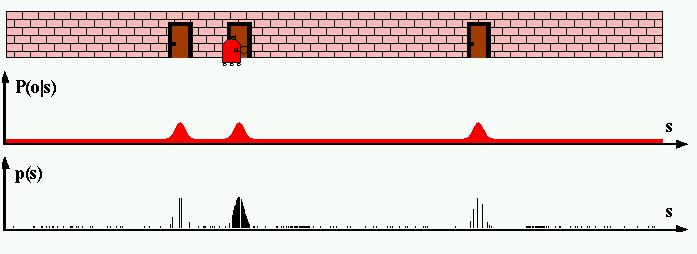
29 Baes Filers Illusraed Localizaion problem
30 sae ime z observaion u acion η consan Baes Filers u z p Bel z z u p z z u z p η z z u p z p η d z u p z u p z p η d Bel u p z p η u z u z p Markov Baes Markov d u u z p u p z p η
31 Baes Filers sae ime z observaion u acion Bel η p z p u Bel d


32 Baes Filers Illusraed
33 Baes Filers Iniial Esimae of Sae Ierae Receive measuremen updae our belief uncerain shrinks redic updae our belief uncerain grows
34 Eample of Baesian Inference psaircase Slow.8 Down! Sensor model pimage saircase.7 pimage no saircase. Environmen prior psaircase.? Baesian inference psaircase image pimage saircase psaircase pim sair psair + pim no sair pno sair.7. /
35 Mehods Baes Filer Kalman Filer aricle Filer Unscened Kalman Filer Eended Kalman Filer
36 Overview The Tracking roblem Baes Filers Kalman Filers Using Kalman Filers aricle Filers
37 The Kalman filer Linear dnamics model: sae undergoes linear ransformaion plus Gaussian noise Observaion model: measuremen is linearl ransformed sae plus Gaussian noise The prediced/correced sae disribuions are Gaussian You onl need o mainain he mean and covariance The calculaions are eas all he inegrals can be done in closed form
38 Tracking wih KFs: Gaussians! iniial esimae predicion measuremen updae
39 Gaussians : ~ σ πσ σ e p N p -σ σ Univariae / / : ~ ì Ó ì Ó Ó ì e p Í p d π Mulivariae
40 ~ ~ σ σ a b a N Y b a Y N + # $ % + roperies of Univariae Gaussians!! " # $ $ % & * + ~ ~ ~ σ σ σ σ σ σ σ σ σ σ N p p N N
41 We sa in he Gaussian world as long as we sar wih Gaussians and perform onl linear ransformaions. ~ ~ T A A B A N Y B A Y N Σ + # $ % + Σ roperies Mulivariae Gaussians Esseniall he same as in he -D case bu wih more general noaion ~ ~ ~ + Σ Σ Σ + Σ Σ + Σ + Σ Σ % & ' Σ Σ N p p N N
42 Linear Kalman Filer Esimaes he sae of a discree-ime conrolled process ha is governed b he linear sochasic difference equaion A + B u + ε wih a measuremen z C + δ
43 Componens of a Kalman Filer A B C ε δ Mari n n ha describes how he sae evolves from o + wihou conrols or noise. Mari n i ha describes how he conrol u changes he sae from o +. Mari k n ha describes how o map he sae o an observaion z. Random variables represening he process and measuremen noise ha are assumed o be independen and normall disribued wih covariance R and Q respecivel.
44 Kalman Filer Algorihm. Algorihm Kalman_filer - Σ - u z :. redicion: Σ A + B u A Σ A + 5. Correcion: T 6. K ΣC Reurn Σ T Σ I K C Σ R T C ΣC + Q K z C
45 Kalman Filer Updaes in D measuremen belief belief new belief measuremen old belief
46 Kalman Filer Updaes in D wih + Σ Σ # $ % Σ Σ + T T Q C C C K K C I C z K bel wih obs K K z K bel σ σ σ σ σ + " # $ + old belief new belief measuremen
47 Kalman Filer Updaes in D! " # + Σ Σ + T R A A B u A bel! " # + + ac a b u a bel σ σ σ old belief new belief measuremen new belief newes belief
48 Kalman Filer Updaes belief laes belief belief measuremen belief
49 The redicion-correcion-ccle! " # + Σ Σ + T R A A B u A bel! " # + + ac a b u a bel σ σ σ redicion
50 The redicion-correcion-ccle + Σ Σ # $ % Σ Σ + T T Q C C C K K C I C z K bel obs K K z K bel σ σ σ σ σ + " # $ + Correcion
51 The redicion-correcion-ccle + Σ Σ # $ % Σ Σ + T T Q C C C K K C I C z K bel obs K K z K bel σ σ σ σ σ + " # $ +! " # + Σ Σ + T R A A B u A bel! " # + + ac a b u a bel σ σ σ Correcion redicion
52 Kalman Filer Summar Highl efficien: olnomial in measuremen dimensionali k and sae dimensionali n: Ok n Opimal for linear Gaussian ssems! Man roboics ssems are nonlinear!
53 Overview The Tracking roblem Baes Filers aricle Filers Kalman Filers Using Kalman Filers
54 aricle Filers: Basic Idea p p... p z equali for n se of n paricles



55 aricle Filer Eplained
56 Basic aricle Filer Algorihm Iniializaion: n paricles [i] ~ p pariclefilers - { for i o n [i] ~ p [i] - } w [i] pz [i] endfor for i o n include [i] in wih probabili w [i] predicion imporance weighs resampling p z... u... η p z p u p z... u... d p p z... u...
57 Imporance Sampling Weigh samples: w f / g
58 Some Roboics Eamples Tracking Hands eople Mobile Robo localizaion eople localizaion Car localizaion Mapping

59 aricle Filer B Frank Dellaer
60 aricle Filers
61 aricle Filers

62 aricles Robusness
63 Facored sampling Represen he sae disribuion non-paramericall redicion: Sample poins from prior densi for he sae Correcion: Weigh he samples according o Y M. Isard and A. Blake CONDENSATION -- condiional densi propagaion for visual racking IJCV 9: d
64 aricle filering We wan o use sampling o propagae densiies over ime i.e. across frames in a video sequence A each ime sep represen poserior Y wih weighed sample se revious ime sep s sample se - Y - is passed o ne ime sep as he effecive prior M. Isard and A. Blake CONDENSATION -- condiional densi propagaion for visual racking IJCV 9:
65 aricle filering Sar wih weighed samples from previous ime sep Sample and shif according o dnamics model Spread due o randomness; his is prediced densi Y - Weigh he samples according o observaion densi Arrive a correced densi esimae Y M. Isard and A. Blake CONDENSATION -- condiional densi propagaion for visual racking IJCV 9:

66 Eample Mike Isard and Andrew Blake

67 Eample Mike Isard and Andrew Blake
68 Eample Mike Isard and Andrew Blake


69 aricle filering resuls hp://
70 Tracking issues Iniializaion Manual Background subracion Deecion
71 Tracking issues Iniializaion Obaining observaion and dnamics model Generaive observaion model: render he sae on op of he image and compare Discriminaive observaion model: classifier or deecor score Dnamics model: learn ver difficul or specif using domain knowledge
72 Tracking issues Iniializaion Obaining observaion and dnamics model redicion vs. correcion If he dnamics model is oo srong will end up ignoring he daa If he observaion model is oo srong racking is reduced o repeaed deecion
73 Tracking issues Iniializaion Obaining observaion and dnamics model redicion vs. correcion Daa associaion Wha if we don know which measuremens o associae wih which racks?

74 Daa associaion So far we ve assumed he enire measuremen o be relevan o deermining he sae In reali here ma be uninformaive measuremens cluer or measuremens ma belong o differen racked objecs Daa associaion: ask of deermining which measuremens go wih which racks
75 Daa associaion Simple sraeg: onl pa aenion o he measuremen ha is closes o he predicion
76 Daa associaion Simple sraeg: onl pa aenion o he measuremen ha is closes o he predicion Doesn alwas work
77 Daa associaion Simple sraeg: onl pa aenion o he measuremen ha is closes o he predicion More sophisicaed sraeg: keep rack of muliple sae/observaion hpoheses Can be done wih paricle filering This is a general problem in compuer vision here is no eas soluion
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Object Tracking. Computer Vision Jia-Bin Huang, Virginia Tech. Many slides from D. Hoiem
 Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
מקורות לחומר בשיעור ספר הלימוד: Forsyth & Ponce מאמרים שונים חומר באינטרנט! פרק פרק 18
 עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
CS 4495 Computer Vision Tracking 1- Kalman,Gaussian
 CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
Probabilistic Robotics
 Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Introduction to Mobile Robotics
 Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
Data Fusion using Kalman Filter. Ioannis Rekleitis
 Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
CSE-473. A Gentle Introduction to Particle Filters
 CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
Using the Kalman filter Extended Kalman filter
 Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Two Popular Bayesian Estimators: Particle and Kalman Filters. McGill COMP 765 Sept 14 th, 2017
 Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Computer Vision 2 Lecture 6
 Compuer Vision 2 Lecure 6 Beond Kalman Filers (09.05.206) leibe@vision.rwh-aachen.de, sueckler@vision.rwh-aachen.de RWTH Aachen Universi, Compuer Vision Group hp://www.vision.rwh-aachen.de Conen of he
Compuer Vision 2 Lecure 6 Beond Kalman Filers (09.05.206) leibe@vision.rwh-aachen.de, sueckler@vision.rwh-aachen.de RWTH Aachen Universi, Compuer Vision Group hp://www.vision.rwh-aachen.de Conen of he
Uncertainty & Localization I
 Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
CSE-571 Robotics. Sample-based Localization (sonar) Motivation. Bayes Filter Implementations. Particle filters. Density Approximation
 Motivation. Bayes Filter Implementations. Particle filters. Density Approximation") Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Sequential Importance Resampling (SIR) Particle Filter
 Particle Filter") Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Tracking. Announcements
 Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
Motion: Tracking, Pose and Actions
 CS 277: Compuer Vision Moion: Tracking ose and Acions rof. Adriana Kovashka Universi of isburgh April 4 27 In his lecure Tracking how an objec moves Esimaing human pose Recognizing human acions Moion:
CS 277: Compuer Vision Moion: Tracking ose and Acions rof. Adriana Kovashka Universi of isburgh April 4 27 In his lecure Tracking how an objec moves Esimaing human pose Recognizing human acions Moion:
Announcements. Recap: Filtering. Recap: Reasoning Over Time. Example: State Representations for Robot Localization. Particle Filtering
 Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Estimation of Poses with Particle Filters
 Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
SEIF, EnKF, EKF SLAM. Pieter Abbeel UC Berkeley EECS
 SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
Anno accademico 2006/2007. Davide Migliore
 Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Computer Vision. Motion Extraction
 Comuer Moion Eracion Comuer Alicaions of moion eracion Change / sho cu deecion Surveillance / raffic monioring Moion caure / gesure analsis HC image sabilisaion Moion comensaion e.g. medical roboics Feaure
Comuer Moion Eracion Comuer Alicaions of moion eracion Change / sho cu deecion Surveillance / raffic monioring Moion caure / gesure analsis HC image sabilisaion Moion comensaion e.g. medical roboics Feaure
7630 Autonomous Robotics Probabilistic Localisation
 7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
Recursive Bayes Filtering Advanced AI
 Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Kalman filtering for maximum likelihood estimation given corrupted observations.
 alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
AUTONOMOUS SYSTEMS. Probabilistic Robotics Basics Kalman Filters Particle Filters. Sebastian Thrun
 AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
Hidden Markov Models
 Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Introduction to Bayesian Estimation. McGill COMP 765 Sept 12 th, 2017
 Inrodcion o Baesian Esimaion McGill COM 765 Sep 2 h 207 Where am I? or firs core problem Las class: We can model a robo s moions and he world as spaial qaniies These are no perfec and herefore i is p o
Inrodcion o Baesian Esimaion McGill COM 765 Sep 2 h 207 Where am I? or firs core problem Las class: We can model a robo s moions and he world as spaial qaniies These are no perfec and herefore i is p o
Chapter 14. (Supplementary) Bayesian Filtering for State Estimation of Dynamic Systems
 Bayesian Filtering for State Estimation of Dynamic Systems") Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
State-Space Models. Initialization, Estimation and Smoothing of the Kalman Filter
 Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Probabilistic Robotics Sebastian Thrun-- Stanford
 robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
Smoothing. Backward smoother: At any give T, replace the observation yt by a combination of observations at & before T
 Smoohing Consan process Separae signal & noise Smooh he daa: Backward smooher: A an give, replace he observaion b a combinaion of observaions a & before Simple smooher : replace he curren observaion wih
Smoohing Consan process Separae signal & noise Smooh he daa: Backward smooher: A an give, replace he observaion b a combinaion of observaions a & before Simple smooher : replace he curren observaion wih
Fundamental Problems In Robotics
 Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Temporal probability models
 Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM
 WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
Robot Motion Model EKF based Localization EKF SLAM Graph SLAM
 Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Simultaneous Localisation and Mapping. IAR Lecture 10 Barbara Webb
 Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
EKF SLAM vs. FastSLAM A Comparison
 vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
Temporal probability models. Chapter 15, Sections 1 5 1
 Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Speaker Adaptation Techniques For Continuous Speech Using Medium and Small Adaptation Data Sets. Constantinos Boulis
 Speaker Adapaion Techniques For Coninuous Speech Using Medium and Small Adapaion Daa Ses Consaninos Boulis Ouline of he Presenaion Inroducion o he speaker adapaion problem Maximum Likelihood Sochasic Transformaions
Speaker Adapaion Techniques For Coninuous Speech Using Medium and Small Adapaion Daa Ses Consaninos Boulis Ouline of he Presenaion Inroducion o he speaker adapaion problem Maximum Likelihood Sochasic Transformaions
Probabilistic Fundamentals in Robotics
 Probabilisic Fundamenals in Roboics Probabilisic Models of Mobile Robos Robo localizaion Basilio Bona DAUIN Poliecnico di Torino Course Ouline Basic mahemaical framework Probabilisic models of mobile robos
Probabilisic Fundamenals in Roboics Probabilisic Models of Mobile Robos Robo localizaion Basilio Bona DAUIN Poliecnico di Torino Course Ouline Basic mahemaical framework Probabilisic models of mobile robos
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Visual Object Tracking based on Real-time Particle Filters. Dong- Hun Lee*, Yong-Gun Jo **, and Hoon Kang ***
 Visual Objec racking based on Real-ime Paricle Filers Dong- Hun Lee*, Yong-Gun Jo **, and Hoon Kang *** * School of Elecrical and Elecronics Engineering, Chung-Ang Universiy, Seoul, Korea (el : +82-2-86-8234;
Visual Objec racking based on Real-ime Paricle Filers Dong- Hun Lee*, Yong-Gun Jo **, and Hoon Kang *** * School of Elecrical and Elecronics Engineering, Chung-Ang Universiy, Seoul, Korea (el : +82-2-86-8234;
Augmented Reality II - Kalman Filters - Gudrun Klinker May 25, 2004
 Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
An EM algorithm for maximum likelihood estimation given corrupted observations. E. E. Holmes, National Marine Fisheries Service
 An M algorihm maimum likelihood esimaion given corruped observaions... Holmes Naional Marine Fisheries Service Inroducion M algorihms e likelihood esimaion o cases wih hidden saes such as when observaions
An M algorihm maimum likelihood esimaion given corruped observaions... Holmes Naional Marine Fisheries Service Inroducion M algorihms e likelihood esimaion o cases wih hidden saes such as when observaions
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Notes on Kalman Filtering
 Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
2016 Possible Examination Questions. Robotics CSCE 574
 206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
Localization. Mobile robot localization is the problem of determining the pose of a robot relative to a given map of the environment.
 Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Financial Econometrics Kalman Filter: some applications to Finance University of Evry - Master 2
 Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
Speech and Language Processing
 Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Introduction to Mobile Robotics Summary
 Inroducion o Mobile Roboics Summary Wolfram Burgard Cyrill Sachniss Maren Bennewiz Diego Tipaldi Luciano Spinello Probabilisic Roboics 2 Probabilisic Roboics Key idea: Eplici represenaion of uncerainy
Inroducion o Mobile Roboics Summary Wolfram Burgard Cyrill Sachniss Maren Bennewiz Diego Tipaldi Luciano Spinello Probabilisic Roboics 2 Probabilisic Roboics Key idea: Eplici represenaion of uncerainy
m = 41 members n = 27 (nonfounders), f = 14 (founders) 8 markers from chromosome 19
, f = 14 (founders) 8 markers from chromosome 19") Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Applications in Industry (Extended) Kalman Filter. Week Date Lecture Title
 Kalman Filter. Week Date Lecture Title") hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
Linear Gaussian State Space Models
 Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Robust Object Tracking under Appearance Change Conditions
 Inernaional Journal of Auomaion and Compuing 7(1), February 2010, 31-38 DOI: 10.1007/s11633-010-0031-9 Robus Objec Tracking under Appearance Change Condiions Qi-Cong Wang Yuan-Hao Gong Chen-Hui Yang Cui-Hua
Inernaional Journal of Auomaion and Compuing 7(1), February 2010, 31-38 DOI: 10.1007/s11633-010-0031-9 Robus Objec Tracking under Appearance Change Condiions Qi-Cong Wang Yuan-Hao Gong Chen-Hui Yang Cui-Hua
Algorithms for Sensor-Based Robotics: Kalman Filters for Mapping and Localization
 Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Recursive Least-Squares Fixed-Interval Smoother Using Covariance Information based on Innovation Approach in Linear Continuous Stochastic Systems
 8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
IB Physics Kinematics Worksheet
 IB Physics Kinemaics Workshee Wrie full soluions and noes for muliple choice answers. Do no use a calculaor for muliple choice answers. 1. Which of he following is a correc definiion of average acceleraion?
IB Physics Kinemaics Workshee Wrie full soluions and noes for muliple choice answers. Do no use a calculaor for muliple choice answers. 1. Which of he following is a correc definiion of average acceleraion?
The complexity of climate model drifts
 The complexiy of climae model drifs Davide Zanchein Angelo Rubino Maeregu Arisido Carlo Gaean Universiy of Venice, Dep. of Environmeal Sc., Informaics and Saisics A conribuion o PREFACE-WP10: (Saisical
The complexiy of climae model drifs Davide Zanchein Angelo Rubino Maeregu Arisido Carlo Gaean Universiy of Venice, Dep. of Environmeal Sc., Informaics and Saisics A conribuion o PREFACE-WP10: (Saisical
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
A PROBABILISTIC MULTIMODAL ALGORITHM FOR TRACKING MULTIPLE AND DYNAMIC OBJECTS
 A PROBABILISTIC MULTIMODAL ALGORITHM FOR TRACKING MULTIPLE AND DYNAMIC OBJECTS MARTA MARRÓN, ELECTRONICS. ALCALÁ UNIV. SPAIN mara@depeca.uah.es MIGUEL A. SOTELO, ELECTRONICS. ALCALÁ UNIV. SPAIN soelo@depeca.uah.es
A PROBABILISTIC MULTIMODAL ALGORITHM FOR TRACKING MULTIPLE AND DYNAMIC OBJECTS MARTA MARRÓN, ELECTRONICS. ALCALÁ UNIV. SPAIN mara@depeca.uah.es MIGUEL A. SOTELO, ELECTRONICS. ALCALÁ UNIV. SPAIN soelo@depeca.uah.es
Monte Carlo data association for multiple target tracking
 Mone Carlo daa associaion for muliple arge racking Rickard Karlsson Dep. of Elecrical Engineering Linköping Universiy SE-58183 Linköping, Sweden E-mail: rickard@isy.liu.se Fredrik Gusafsson Dep. of Elecrical
Mone Carlo daa associaion for muliple arge racking Rickard Karlsson Dep. of Elecrical Engineering Linköping Universiy SE-58183 Linköping, Sweden E-mail: rickard@isy.liu.se Fredrik Gusafsson Dep. of Elecrical
OBJECTIVES OF TIME SERIES ANALYSIS
 OBJECTIVES OF TIME SERIES ANALYSIS Undersanding he dynamic or imedependen srucure of he observaions of a single series (univariae analysis) Forecasing of fuure observaions Asceraining he leading, lagging
OBJECTIVES OF TIME SERIES ANALYSIS Undersanding he dynamic or imedependen srucure of he observaions of a single series (univariae analysis) Forecasing of fuure observaions Asceraining he leading, lagging
The Rosenblatt s LMS algorithm for Perceptron (1958) is built around a linear neuron (a neuron with a linear
 is built around a linear neuron (a neuron with a linear") In The name of God Lecure4: Percepron and AALIE r. Majid MjidGhoshunih Inroducion The Rosenbla s LMS algorihm for Percepron 958 is buil around a linear neuron a neuron ih a linear acivaion funcion. Hoever,
In The name of God Lecure4: Percepron and AALIE r. Majid MjidGhoshunih Inroducion The Rosenbla s LMS algorihm for Percepron 958 is buil around a linear neuron a neuron ih a linear acivaion funcion. Hoever,
Outline of Topics. Analysis of ODE models with MATLAB. What will we learn from this lecture. Aim of analysis: Why such analysis matters?
 of Topics wih MATLAB Shan He School for Compuaional Science Universi of Birmingham Module 6-3836: Compuaional Modelling wih MATLAB Wha will we learn from his lecure Aim of analsis: Aim of analsis. Some
of Topics wih MATLAB Shan He School for Compuaional Science Universi of Birmingham Module 6-3836: Compuaional Modelling wih MATLAB Wha will we learn from his lecure Aim of analsis: Aim of analsis. Some
Simultaneous Localization and Mapping with Unknown Data Association Using FastSLAM
 Simulaneous Localizaion and Mapping wih Unknown Daa Associaion Using FasSLAM Michael Monemerlo, Sebasian Thrun Absrac The Exended Kalman Filer (EKF has been he de faco approach o he Simulaneous Localizaion
Simulaneous Localizaion and Mapping wih Unknown Daa Associaion Using FasSLAM Michael Monemerlo, Sebasian Thrun Absrac The Exended Kalman Filer (EKF has been he de faco approach o he Simulaneous Localizaion
2.160 System Identification, Estimation, and Learning. Lecture Notes No. 8. March 6, 2006
 2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
Lecture 3: Exponential Smoothing
 NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
References are appeared in the last slide. Last update: (1393/08/19)
") SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
Data Assimilation. Alan O Neill National Centre for Earth Observation & University of Reading
 Daa Assimilaion Alan O Neill Naional Cenre for Earh Observaion & Universiy of Reading Conens Moivaion Univariae scalar) daa assimilaion Mulivariae vecor) daa assimilaion Opimal Inerpoleion BLUE) 3d-Variaional
Daa Assimilaion Alan O Neill Naional Cenre for Earh Observaion & Universiy of Reading Conens Moivaion Univariae scalar) daa assimilaion Mulivariae vecor) daa assimilaion Opimal Inerpoleion BLUE) 3d-Variaional
Tom Heskes and Onno Zoeter. Presented by Mark Buller
 Tom Heskes and Onno Zoeer Presened by Mark Buller Dynamic Bayesian Neworks Direced graphical models of sochasic processes Represen hidden and observed variables wih differen dependencies Generalize Hidden
Tom Heskes and Onno Zoeer Presened by Mark Buller Dynamic Bayesian Neworks Direced graphical models of sochasic processes Represen hidden and observed variables wih differen dependencies Generalize Hidden
Localization and Map Making
 Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
A Rao-Blackwellized Parts-Constellation Tracker
 A Rao-Blackwellized Pars-Consellaion Tracker Gran Schindler and Frank Dellaer College of Compuing, Georgia Insiue of Technology {schindler, dellaer}@cc.gaech.edu Absrac We presen a mehod for efficienly
A Rao-Blackwellized Pars-Consellaion Tracker Gran Schindler and Frank Dellaer College of Compuing, Georgia Insiue of Technology {schindler, dellaer}@cc.gaech.edu Absrac We presen a mehod for efficienly
Embedded Systems and Software. A Simple Introduction to Embedded Control Systems (PID Control)
") Embedded Sysems and Sofware A Simple Inroducion o Embedded Conrol Sysems (PID Conrol) Embedded Sysems and Sofware, ECE:3360. The Universiy of Iowa, 2016 Slide 1 Acknowledgemens The maerial in his lecure
Embedded Sysems and Sofware A Simple Inroducion o Embedded Conrol Sysems (PID Conrol) Embedded Sysems and Sofware, ECE:3360. The Universiy of Iowa, 2016 Slide 1 Acknowledgemens The maerial in his lecure
CS376 Computer Vision Lecture 6: Optical Flow
 CS376 Compuer Vision Lecure 6: Opical Flow Qiing Huang Feb. 11 h 2019 Slides Credi: Krisen Grauman and Sebasian Thrun, Michael Black, Marc Pollefeys Opical Flow mage racking 3D compuaion mage sequence
CS376 Compuer Vision Lecure 6: Opical Flow Qiing Huang Feb. 11 h 2019 Slides Credi: Krisen Grauman and Sebasian Thrun, Michael Black, Marc Pollefeys Opical Flow mage racking 3D compuaion mage sequence
FastSLAM: An Efficient Solution to the Simultaneous Localization And Mapping Problem with Unknown Data Association
 FasSLAM: An Efficien Soluion o he Simulaneous Localizaion And Mapping Problem wih Unknown Daa Associaion Sebasian Thrun 1, Michael Monemerlo 1, Daphne Koller 1, Ben Wegbrei 1 Juan Nieo 2, and Eduardo Nebo
FasSLAM: An Efficien Soluion o he Simulaneous Localizaion And Mapping Problem wih Unknown Daa Associaion Sebasian Thrun 1, Michael Monemerlo 1, Daphne Koller 1, Ben Wegbrei 1 Juan Nieo 2, and Eduardo Nebo
A JOINT RADAR-ACOUSTIC PARTICLE FILTER TRACKER WITH ACOUSTIC PROPAGATION DELAY COMPENSATION
 A JOINT RADAR-ACOUSTIC ARTICLE FILTER TRACKER WITH ACOUSTIC ROAGATION DELAY COMENSATION Volkan Cevher, Milind Borkar, and James H. McClellan Georgia Insiue of Technology Alana, GA 30332-0250 ABSTRACT In
A JOINT RADAR-ACOUSTIC ARTICLE FILTER TRACKER WITH ACOUSTIC ROAGATION DELAY COMENSATION Volkan Cevher, Milind Borkar, and James H. McClellan Georgia Insiue of Technology Alana, GA 30332-0250 ABSTRACT In
Math Wednesday March 3, , 4.3: First order systems of Differential Equations Why you should expect existence and uniqueness for the IVP
 Mah 2280 Wednesda March 3, 200 4., 4.3: Firs order ssems of Differenial Equaions Wh ou should epec eisence and uniqueness for he IVP Eample: Consider he iniial value problem relaed o page 4 of his eserda
Mah 2280 Wednesda March 3, 200 4., 4.3: Firs order ssems of Differenial Equaions Wh ou should epec eisence and uniqueness for he IVP Eample: Consider he iniial value problem relaed o page 4 of his eserda
Lab #2: Kinematics in 1-Dimension
 Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
Properties of Autocorrelated Processes Economics 30331
 Properies of Auocorrelaed Processes Economics 3033 Bill Evans Fall 05 Suppose we have ime series daa series labeled as where =,,3, T (he final period) Some examples are he dail closing price of he S&500,
Properies of Auocorrelaed Processes Economics 3033 Bill Evans Fall 05 Suppose we have ime series daa series labeled as where =,,3, T (he final period) Some examples are he dail closing price of he S&500,
Switching Observation Models for Contour Tracking in Clutter
 In Proc. of IEEE Conf. on CVPR 03, Madison, Wisconsin, 2003 Swiching Observaion Models for Conour Tracking in Cluer Ying Wu, Gang Hua, Ting Yu Deparmen of Elecrical & Compuer Engineering Norhwesern Universiy
In Proc. of IEEE Conf. on CVPR 03, Madison, Wisconsin, 2003 Swiching Observaion Models for Conour Tracking in Cluer Ying Wu, Gang Hua, Ting Yu Deparmen of Elecrical & Compuer Engineering Norhwesern Universiy
SPH3U: Projectiles. Recorder: Manager: Speaker:
 SPH3U: Projeciles Now i s ime o use our new skills o analyze he moion of a golf ball ha was ossed hrough he air. Le s find ou wha is special abou he moion of a projecile. Recorder: Manager: Speaker: 0
SPH3U: Projeciles Now i s ime o use our new skills o analyze he moion of a golf ball ha was ossed hrough he air. Le s find ou wha is special abou he moion of a projecile. Recorder: Manager: Speaker: 0
Lecture 2-1 Kinematics in One Dimension Displacement, Velocity and Acceleration Everything in the world is moving. Nothing stays still.
 Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Moving Object Tracking
 Moving Objec Tracing Princeon Universiy COS 49 Lecure Dec. 6 007 Harpree S. Sawhney hsawhney@sarnoff.com Recapiulaion : Las Lecure Moving objec deecion as robus regression wih oulier deecion Simulaneous
Moving Objec Tracing Princeon Universiy COS 49 Lecure Dec. 6 007 Harpree S. Sawhney hsawhney@sarnoff.com Recapiulaion : Las Lecure Moving objec deecion as robus regression wih oulier deecion Simulaneous
Chapter 4. Truncation Errors
 Chaper 4. Truncaion Errors and he Taylor Series Truncaion Errors and he Taylor Series Non-elemenary funcions such as rigonomeric, eponenial, and ohers are epressed in an approimae fashion using Taylor
Chaper 4. Truncaion Errors and he Taylor Series Truncaion Errors and he Taylor Series Non-elemenary funcions such as rigonomeric, eponenial, and ohers are epressed in an approimae fashion using Taylor
Air Traffic Forecast Empirical Research Based on the MCMC Method
 Compuer and Informaion Science; Vol. 5, No. 5; 0 ISSN 93-8989 E-ISSN 93-8997 Published by Canadian Cener of Science and Educaion Air Traffic Forecas Empirical Research Based on he MCMC Mehod Jian-bo Wang,
Compuer and Informaion Science; Vol. 5, No. 5; 0 ISSN 93-8989 E-ISSN 93-8997 Published by Canadian Cener of Science and Educaion Air Traffic Forecas Empirical Research Based on he MCMC Mehod Jian-bo Wang,
AUV positioning based on Interactive Multiple Model
 AUV posiioning based on Ineracive Muliple Model H. Q. Liu ARL, Tropical Marine Science Insiue Naional Universiy of Singapore 18 Ken Ridge Road, Singapore 1197 Email: hongqing@arl.nus.edu.sg Mandar Chire
AUV posiioning based on Ineracive Muliple Model H. Q. Liu ARL, Tropical Marine Science Insiue Naional Universiy of Singapore 18 Ken Ridge Road, Singapore 1197 Email: hongqing@arl.nus.edu.sg Mandar Chire
CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK
 175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
3.1.3 INTRODUCTION TO DYNAMIC OPTIMIZATION: DISCRETE TIME PROBLEMS. A. The Hamiltonian and First-Order Conditions in a Finite Time Horizon
 3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
Style Adaptive Bayesian Tracking Using Explicit Manifold Learning
 Syle Adapive Bayesian Tracking Using Explici Manifold Learning Chan-Su Lee and Ahmed Elgammal Compuer Science Deparmen Rugers, The Sae Universiy of New Jersey Piscaaway, NJ 8854, USA Email:{chansu, elgammal}@cs.rugers.edu
Syle Adapive Bayesian Tracking Using Explici Manifold Learning Chan-Su Lee and Ahmed Elgammal Compuer Science Deparmen Rugers, The Sae Universiy of New Jersey Piscaaway, NJ 8854, USA Email:{chansu, elgammal}@cs.rugers.edu
A Rao-Blackwellized Particle Filter for EigenTracking
 A Rao-Blackwellized Paricle Filer for EigenTracking Zia Khan, Tucker Balch, and Frank Dellaer Georgia Insiue of Technology College of Compuing {zkhan,ucker,dellaer}@cc.gaech.edu Absrac Subspace represenaions
A Rao-Blackwellized Paricle Filer for EigenTracking Zia Khan, Tucker Balch, and Frank Dellaer Georgia Insiue of Technology College of Compuing {zkhan,ucker,dellaer}@cc.gaech.edu Absrac Subspace represenaions
The fundamental mass balance equation is ( 1 ) where: I = inputs P = production O = outputs L = losses A = accumulation
 where: I = inputs P = production O = outputs L = losses A = accumulation") Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Unit Root Time Series. Univariate random walk
 Uni Roo ime Series Univariae random walk Consider he regression y y where ~ iid N 0, he leas squares esimae of is: ˆ yy y y yy Now wha if = If y y hen le y 0 =0 so ha y j j If ~ iid N 0, hen y ~ N 0, he
Uni Roo ime Series Univariae random walk Consider he regression y y where ~ iid N 0, he leas squares esimae of is: ˆ yy y y yy Now wha if = If y y hen le y 0 =0 so ha y j j If ~ iid N 0, hen y ~ N 0, he
F2E5216/TS1002 Adaptive Filtering and Change Detection. Likelihood Ratio based Change Detection Tests. Gaussian Case. Recursive Formulation
 Adapive Filering and Change Deecion Fredrik Gusafsson (LiTH and Bo Wahlberg (KTH Likelihood Raio based Change Deecion Tess Hypohesis es: H : no jump H 1 (k, ν : a jump of magniude ν a ime k. Lecure 8 Filer
Adapive Filering and Change Deecion Fredrik Gusafsson (LiTH and Bo Wahlberg (KTH Likelihood Raio based Change Deecion Tess Hypohesis es: H : no jump H 1 (k, ν : a jump of magniude ν a ime k. Lecure 8 Filer
Efficient POMDP Forward Search by Predicting the Posterior Belief Distribution Ruijie He and Nicholas Roy
 Compuer Science and Arificial Inelligence Laboraory Technical Repor MIT-CSAIL-TR-2009-044 Sepember 23, 2009 Efficien POMDP Forward Search by Predicing he Poserior Belief Disribuion Ruijie He and Nicholas
Compuer Science and Arificial Inelligence Laboraory Technical Repor MIT-CSAIL-TR-2009-044 Sepember 23, 2009 Efficien POMDP Forward Search by Predicing he Poserior Belief Disribuion Ruijie He and Nicholas
CptS 570 Machine Learning School of EECS Washington State University. CptS Machine Learning 1
 CpS 570 Machine Learning School of EECS Washingon Sae Universiy CpS 570 - Machine Learning 1 Form of underlying disribuions unknown Bu sill wan o perform classificaion and regression Semi-parameric esimaion
CpS 570 Machine Learning School of EECS Washingon Sae Universiy CpS 570 - Machine Learning 1 Form of underlying disribuions unknown Bu sill wan o perform classificaion and regression Semi-parameric esimaion