The Rosenblatt s LMS algorithm for Perceptron (1958) is built around a linear neuron (a neuron with a linear
|
|
|
- Corey Greene
- 5 years ago
- Views:
Transcription
1 In The name of God Lecure4: Percepron and AALIE r. Majid MjidGhoshunih Inroducion The Rosenbla s LMS algorihm for Percepron 958 is buil around a linear neuron a neuron ih a linear acivaion funcion. Hoever, he Percepron is buil around a nonlinear neuron, namely he McCulloch-Pis model of a neuron. This neuron has a hard- limiing acivaion funcion performing he signum funcion. Recenly he erm mulilayer Percepron has ofen been used as a synonym for he erm mulilayer feedforard neural neork. In his secion e ill be referring o he former meaning.
2 Percepron Goal classifying i applied Inpu ino one of fo classes Procedure if oupu of hard limier is +, o class C ; if i is -, o class C inpu of hard limier : eighed sum of inpu effec of bias b is merely o shif decision boundary aay from origin synapic eighs adaped on ieraion by ieraion basis 3 Percepron ecision regions separaed by a hyper plane poin, above boundary line is assigned o C poin y,y belo boundary line o class C 4


3 Percepron LearningTheorem Linearly separable if o classes are linearly separable, here eiss decision surface consising of hyper plane. If so, here eiss eigh vecor T > 0 for every inpu vecor belonging o class C T 0 for every inpu vecor belonging o class C for only linearly separable classes, percepron orks ell 5 Percepron LearningTheorem Using modified signal-flo graph bias bn is reaed as synapic eigh driven by fied inpu + 0 n is bn linear combiner oupu 6
4 Percepron LearningTheorem 3 Weigh adjusmen if n is correcly classified Oherise learning rae parameer ηn conrols adjusmen applied o eigh vecor 7 Summary of Learning. Iniializaion se 0=0. Acivaion a ime sep n, acivae percepron by applying coninuous valued inpu vecor n and desired response dn 3. Compuaion of acual response yn = sgn[ T n n] 4. Adapaion of Weigh Vecor 5. Coninuaion incremen ime sep n and go back o sep 8
5 The neork is capable of solving linearly separable problem 9 Learning rule An algorihm o updae he eighs so ha finally he inpu paerns lie on boh sides of he line decided by he percepron Le be he ime, a =0 0, e have 0
6 Learning rule An algorihm o updae he eighs so ha finally he inpu paerns lie on boh sides of he line decided by he percepron Le be he ime, a =, e have Learning rule An algorihm o updae he eighs so ha finally he inpu paerns lie on boh sides of he line decided by he percepron Le be he ime, a =, e have
7 Learning rule An algorihm o updae he eighs so ha finally he inpu paerns lie on boh sides of he line decided by he percepron Le be he ime, a =3 3, e have 3 Implemenaion of Logical OT, A, and OR 4
8 Implemenaion of Logical Gae 5 Finding Weighs by MSE Mehod Finding Weighs by MSE Mehod Wrie a equaion for each raining daa Oupu for firs class is + and for second class Oupu for firs class is + and for second class is -or 0 Apply he MSE mehod o solve he problem Eample: Implemenaion of A gae 0 0 pe: pe e o o g e b b * 0 6
9 Summary: Percepron vs. MSE procedures Percepron rule The percepron rule alays finds a soluion if he classes are linearly separable. Bu does no converge if he classes are no-separable. MSE crierion The MSE soluion has guaraneed convergence, bu i may no find a separaing hyperplane if classes are linearly separable oice ha MSE ries o minimize he sum of he squares of he disances of he raining daa o he separaing hyperplane. 7 Convergence of he Percepron learning la Rosenbla proved ha if inpu paerns are linearly separable, hen he Percepron learning la converges, and he hyperplane separaing o classes of inpu paerns can be deermined. Fied incremen convergence heorem for linearly separable vecors X and X, percepron converges afer some n 0 ieraions 8
10 Limiaion of Percepron The XOR problem Minsky: nonlinear separabiliy 9 Percepron ih sigmoid acivaion funcion For single neuron ih sep acivaion funcion: For single neuron ih Sigmoid acivaion funcion: 0
11 Represenaionof of Percepron in MATLAB MATLAB TOOLBOX ne = nepp,,f,lf escripion of funcion Perceprons are used o solve simple i.e. linearly separable classificaion problems. ET = EWPP,T,TF,LF TF akes o inpus, P : R-by-Q mari of Q inpu vecors of R elemens each.. T : S-by-Q mari of Q arge vecors of S elemens each. TF: Transfer funcion, defaul = 'hardlim'. LF: Learningfuncion funcion, defaul='learnp' learnp. Reurns a ne percepron.
12 Classificaion eample: Linear separabiliy See he M_ file 3 4
13 5 Classificaion of daa: nonlinear separabiliy 6

14 Classificaion of daa: nonlinear separabiliy 7 AALIE: The Adapive Linear Elemen AALIE is Percepron ih linear acivaion funcion This is proposed by Widro 8
15 Applicaions of Adaline In general, he Adaline is used o perform Linear approimaion of a small segmen of a nonlinear hyper surface, hich is generaed by a p variable funcion, y =f. Inhiscase, he bias is usually needed. Linear filering and predicion of daa signals; Paern associaion, ha is, generaion of m elemen oupu vecors associaed ih respecive p elemen inpu vecors. 9 For single neuron ε = d-y For muli neuron Error concep ε i = d i -y i i=:m ε m = d m -y m m is number of oupu neuron The oal measure of he goodness of approimaion, or he performance inde, can be specified by he mean- squared error over m neurons and raining vecors: J W m m i j e j i 30






16 W : eigh m m m W p g pm p 3 The MSE soluion is: m p p p m p X X X W The Error equaion is: m m E m E W J m p p m W X E 3
17 For single neuron m=: E E W J Replacing error in equaion: ] [ XW XW W J ] [ ] [ XW X W XW XW W J ] [ XW X W X W XW 33 ] [ XW X W XW 0. Eample: X W 6 5 X W ] ] [ 55] *[ [385 J [385 ] 0 45 ] [ 55] *[330 [ , J J [ , J

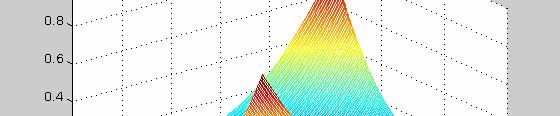
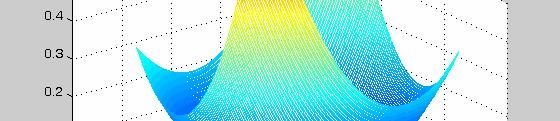
18 The plo of performance inde J, of eample 35 Eample :he performance inde in general case 36
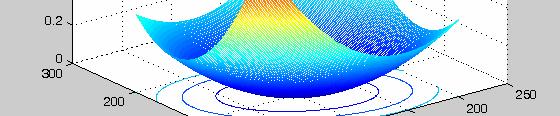
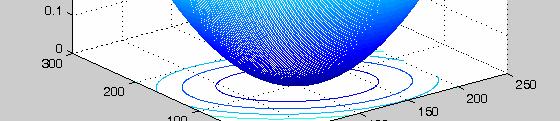
19 Mehod of seepes descen If is large he order of calculaion ill be high. In order o avoid his problem, e can find he opimal eigh vecor for hich he meansquared error, J. J aains minimum by ieraive modificaion of he eigh vecor for each raining eemplar in he direcion opposie o he gradien of he performance inde, J, An eample illusraed in Figure 4 5 for a single eigh siuaion. 37 Illusraion of he seepes descen mehod 38
20 Mehod of seepes descen When heeigh ihvecor aains he opimal value for hich he gradien is zero 0 in Figure 4 5, he ieraions are sopped. More precisely, he ieraions are specified as here he eigh adjusmen, n, is proporional o he gradien of he mean-squared error here η is a learning gain. 39 The LMS Widro Hoff Learning La The Leas- Mean- Square learning la replaces he gradien of he mean- squared error ih he gradien updae and can be rien in folloing form: W i m pm d i n n n d y i m i y p : m m m W n W n n n 40
21 The LMS Widro Hoff Learning La For single neuron For linear neuron y i i d y J d i i J y d i i i i i For nonlinear neuron v i i y v d y J d v J J v d v v v i i i 4 neork raining To ypes of neork raining: Sequenial mode or incremenal on-line, sochasic, or per-paern: Weighs updaed afer each paern is presened Bach mode off-line or per-epoch : Weighs updaed afer all paern is presened 4
22 Some general commens on he learning process Compuaionally, i he learning process goes hrough all raining eamples an epoch number of imes, unil a sopping crierion is reached. The convergence process can be moniored ih he plo of he mean- squared error funcion JWn. The popular sopping crieria are: he mean- squared error is sufficienly small: The rae of change of he mean- squared error is sufficienly small: 43 The effec of learning R Rae: ƞ 44
23 Applicaions Applicaions MA Moving average modeling filering For m= 0 b y 3 0 X 0 b b 3 y b y Applicaions Applicaions AR auo regressive modeling: M M i i M n b i n y a n y Model Order of : For M=: y y y 3 0 y y y y X a a 3 y y 3 y y X b a y y
24 PI conroller: Applicaions 3 47 Simulaion of MA modeling Suppose he MA model as: b M 3 Inpu is Gaussian noise ih mean=0 and var= y is Calculaed by recursive equaion Please see he M_file 48
25 M_file of MA Modeling 49 MA Modeling Zeros eigh iniial and η= 0.0 umber of daa raining se: =0 50

26 MA Modeling Zeros eigh iniial and η= 0. umber of daa raining se: =0 5 MA Modeling Random eigh iniial and η= 0.0 umber of daa raining se: =0 5


27 MA Modeling Random eigh iniial and η= 0. umber of daa raining se: =0 53 MA Modeling Random eigh iniial and η= 0. umber of daa raining se: =0 54
28 MATLAB TOOLBOX ne = nelinpr,s,i,lr escripion of funcion Linear layers are ofen used as adapive filers for signal processing and predicion. EWLIPR,S,I,LR I LR akes hese argumens, PR - RQ mari of Q represenaive inpu vecors. S - umber of elemens in he oupu vecor. I - Inpu delay vecor, defaul = [0]. LR - Learning rae, defaul = 0.0; and reurns a ne linear layer. 55
CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK
 175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
Dimitri Solomatine. D.P. Solomatine. Data-driven modelling (part 2). 2
. 2") Daa-driven modelling. Par. Daa-driven Arificial di Neural modelling. Newors Par Dimiri Solomaine Arificial neural newors D.P. Solomaine. Daa-driven modelling par. 1 Arificial neural newors ANN: main pes
Daa-driven modelling. Par. Daa-driven Arificial di Neural modelling. Newors Par Dimiri Solomaine Arificial neural newors D.P. Solomaine. Daa-driven modelling par. 1 Arificial neural newors ANN: main pes
Article from. Predictive Analytics and Futurism. July 2016 Issue 13
 Aricle from Predicive Analyics and Fuurism July 6 Issue An Inroducion o Incremenal Learning By Qiang Wu and Dave Snell Machine learning provides useful ools for predicive analyics The ypical machine learning
Aricle from Predicive Analyics and Fuurism July 6 Issue An Inroducion o Incremenal Learning By Qiang Wu and Dave Snell Machine learning provides useful ools for predicive analyics The ypical machine learning
Slide03 Historical Overview Haykin Chapter 3 (Chap 1, 3, 3rd Ed): Single-Layer Perceptrons Multiple Faces of a Single Neuron Part I: Adaptive Filter
: Single-Layer Perceptrons Multiple Faces of a Single Neuron Part I: Adaptive Filter") Slide3 Haykin Chaper 3 (Chap, 3, 3rd Ed): Single-Layer Perceprons CPSC 636-6 Insrucor: Yoonsuck Choe Hisorical Overview McCulloch and Pis (943): neural neworks as compuing machines. Hebb (949): posulaed
Slide3 Haykin Chaper 3 (Chap, 3, 3rd Ed): Single-Layer Perceprons CPSC 636-6 Insrucor: Yoonsuck Choe Hisorical Overview McCulloch and Pis (943): neural neworks as compuing machines. Hebb (949): posulaed
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
MATH 5720: Gradient Methods Hung Phan, UMass Lowell October 4, 2018
 MATH 5720: Gradien Mehods Hung Phan, UMass Lowell Ocober 4, 208 Descen Direcion Mehods Consider he problem min { f(x) x R n}. The general descen direcions mehod is x k+ = x k + k d k where x k is he curren
MATH 5720: Gradien Mehods Hung Phan, UMass Lowell Ocober 4, 208 Descen Direcion Mehods Consider he problem min { f(x) x R n}. The general descen direcions mehod is x k+ = x k + k d k where x k is he curren
Deep Learning: Theory, Techniques & Applications - Recurrent Neural Networks -
 Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics
Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics
PENALIZED LEAST SQUARES AND PENALIZED LIKELIHOOD
 PENALIZED LEAST SQUARES AND PENALIZED LIKELIHOOD HAN XIAO 1. Penalized Leas Squares Lasso solves he following opimizaion problem, ˆβ lasso = arg max β R p+1 1 N y i β 0 N x ij β j β j (1.1) for some 0.
PENALIZED LEAST SQUARES AND PENALIZED LIKELIHOOD HAN XIAO 1. Penalized Leas Squares Lasso solves he following opimizaion problem, ˆβ lasso = arg max β R p+1 1 N y i β 0 N x ij β j β j (1.1) for some 0.
Experiments on logistic regression
 Experimens on logisic regression Ning Bao March, 8 Absrac In his repor, several experimens have been conduced on a spam daa se wih Logisic Regression based on Gradien Descen approach. Firs, he overfiing
Experimens on logisic regression Ning Bao March, 8 Absrac In his repor, several experimens have been conduced on a spam daa se wih Logisic Regression based on Gradien Descen approach. Firs, he overfiing
0.1 MAXIMUM LIKELIHOOD ESTIMATION EXPLAINED
 0.1 MAXIMUM LIKELIHOOD ESTIMATIO EXPLAIED Maximum likelihood esimaion is a bes-fi saisical mehod for he esimaion of he values of he parameers of a sysem, based on a se of observaions of a random variable
0.1 MAXIMUM LIKELIHOOD ESTIMATIO EXPLAIED Maximum likelihood esimaion is a bes-fi saisical mehod for he esimaion of he values of he parameers of a sysem, based on a se of observaions of a random variable
Online Convex Optimization Example And Follow-The-Leader
 CSE599s, Spring 2014, Online Learning Lecure 2-04/03/2014 Online Convex Opimizaion Example And Follow-The-Leader Lecurer: Brendan McMahan Scribe: Sephen Joe Jonany 1 Review of Online Convex Opimizaion
CSE599s, Spring 2014, Online Learning Lecure 2-04/03/2014 Online Convex Opimizaion Example And Follow-The-Leader Lecurer: Brendan McMahan Scribe: Sephen Joe Jonany 1 Review of Online Convex Opimizaion
State-Space Models. Initialization, Estimation and Smoothing of the Kalman Filter
 Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Non-parametric techniques. Instance Based Learning. NN Decision Boundaries. Nearest Neighbor Algorithm. Distance metric important
 on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LDA, logisic
on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LDA, logisic
Random Walk with Anti-Correlated Steps
 Random Walk wih Ani-Correlaed Seps John Noga Dirk Wagner 2 Absrac We conjecure he expeced value of random walks wih ani-correlaed seps o be exacly. We suppor his conjecure wih 2 plausibiliy argumens and
Random Walk wih Ani-Correlaed Seps John Noga Dirk Wagner 2 Absrac We conjecure he expeced value of random walks wih ani-correlaed seps o be exacly. We suppor his conjecure wih 2 plausibiliy argumens and
Theory of! Partial Differential Equations!
 hp://www.nd.edu/~gryggva/cfd-course/! Ouline! Theory o! Parial Dierenial Equaions! Gréar Tryggvason! Spring 011! Basic Properies o PDE!! Quasi-linear Firs Order Equaions! - Characerisics! - Linear and
hp://www.nd.edu/~gryggva/cfd-course/! Ouline! Theory o! Parial Dierenial Equaions! Gréar Tryggvason! Spring 011! Basic Properies o PDE!! Quasi-linear Firs Order Equaions! - Characerisics! - Linear and
Non-parametric techniques. Instance Based Learning. NN Decision Boundaries. Nearest Neighbor Algorithm. Distance metric important
 on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LTU, decision
on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LTU, decision
Ensamble methods: Boosting
 Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room
Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room
References are appeared in the last slide. Last update: (1393/08/19)
") SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
CSCE 496/896 Lecture 2: Basic Artificial Neural Networks. Stephen Scott. Introduction. Supervised Learning. Basic Units.
 (Adaped from Vinod Variyam, Ehem Alpaydin, Tom Michell, Ian Goodfellow, and Aurélien Géron) learning is mos fundamenal, classic form machine learning par comes from he par labels for examples (insances)
(Adaped from Vinod Variyam, Ehem Alpaydin, Tom Michell, Ian Goodfellow, and Aurélien Géron) learning is mos fundamenal, classic form machine learning par comes from he par labels for examples (insances)
d 1 = c 1 b 2 - b 1 c 2 d 2 = c 1 b 3 - b 1 c 3
 and d = c b - b c c d = c b - b c c This process is coninued unil he nh row has been compleed. The complee array of coefficiens is riangular. Noe ha in developing he array an enire row may be divided or
and d = c b - b c c d = c b - b c c This process is coninued unil he nh row has been compleed. The complee array of coefficiens is riangular. Noe ha in developing he array an enire row may be divided or
INTRODUCTION TO MACHINE LEARNING 3RD EDITION
 ETHEM ALPAYDIN The MIT Press, 2014 Lecure Slides for INTRODUCTION TO MACHINE LEARNING 3RD EDITION alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/~ehem/i2ml3e CHAPTER 2: SUPERVISED LEARNING Learning a Class
ETHEM ALPAYDIN The MIT Press, 2014 Lecure Slides for INTRODUCTION TO MACHINE LEARNING 3RD EDITION alpaydin@boun.edu.r hp://www.cmpe.boun.edu.r/~ehem/i2ml3e CHAPTER 2: SUPERVISED LEARNING Learning a Class
Rapid Termination Evaluation for Recursive Subdivision of Bezier Curves
 Rapid Terminaion Evaluaion for Recursive Subdivision of Bezier Curves Thomas F. Hain School of Compuer and Informaion Sciences, Universiy of Souh Alabama, Mobile, AL, U.S.A. Absrac Bézier curve flaening
Rapid Terminaion Evaluaion for Recursive Subdivision of Bezier Curves Thomas F. Hain School of Compuer and Informaion Sciences, Universiy of Souh Alabama, Mobile, AL, U.S.A. Absrac Bézier curve flaening
A Dynamic Model of Economic Fluctuations
 CHAPTER 15 A Dynamic Model of Economic Flucuaions Modified for ECON 2204 by Bob Murphy 2016 Worh Publishers, all righs reserved IN THIS CHAPTER, OU WILL LEARN: how o incorporae dynamics ino he AD-AS model
CHAPTER 15 A Dynamic Model of Economic Flucuaions Modified for ECON 2204 by Bob Murphy 2016 Worh Publishers, all righs reserved IN THIS CHAPTER, OU WILL LEARN: how o incorporae dynamics ino he AD-AS model
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Theory of! Partial Differential Equations-I!
 hp://users.wpi.edu/~grear/me61.hml! Ouline! Theory o! Parial Dierenial Equaions-I! Gréar Tryggvason! Spring 010! Basic Properies o PDE!! Quasi-linear Firs Order Equaions! - Characerisics! - Linear and
hp://users.wpi.edu/~grear/me61.hml! Ouline! Theory o! Parial Dierenial Equaions-I! Gréar Tryggvason! Spring 010! Basic Properies o PDE!! Quasi-linear Firs Order Equaions! - Characerisics! - Linear and
Ensamble methods: Bagging and Boosting
 Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
More Digital Logic. t p output. Low-to-high and high-to-low transitions could have different t p. V in (t)
") EECS 4 Spring 23 Lecure 2 EECS 4 Spring 23 Lecure 2 More igial Logic Gae delay and signal propagaion Clocked circui elemens (flip-flop) Wriing a word o memory Simplifying digial circuis: Karnaugh maps
EECS 4 Spring 23 Lecure 2 EECS 4 Spring 23 Lecure 2 More igial Logic Gae delay and signal propagaion Clocked circui elemens (flip-flop) Wriing a word o memory Simplifying digial circuis: Karnaugh maps
An recursive analytical technique to estimate time dependent physical parameters in the presence of noise processes
 WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
Errata (1 st Edition)
") P Sandborn, os Analysis of Elecronic Sysems, s Ediion, orld Scienific, Singapore, 03 Erraa ( s Ediion) S K 05D Page 8 Equaion (7) should be, E 05D E Nu e S K he L appearing in he equaion in he book does
P Sandborn, os Analysis of Elecronic Sysems, s Ediion, orld Scienific, Singapore, 03 Erraa ( s Ediion) S K 05D Page 8 Equaion (7) should be, E 05D E Nu e S K he L appearing in he equaion in he book does
Chapter 4. Truncation Errors
 Chaper 4. Truncaion Errors and he Taylor Series Truncaion Errors and he Taylor Series Non-elemenary funcions such as rigonomeric, eponenial, and ohers are epressed in an approimae fashion using Taylor
Chaper 4. Truncaion Errors and he Taylor Series Truncaion Errors and he Taylor Series Non-elemenary funcions such as rigonomeric, eponenial, and ohers are epressed in an approimae fashion using Taylor
3.1.3 INTRODUCTION TO DYNAMIC OPTIMIZATION: DISCRETE TIME PROBLEMS. A. The Hamiltonian and First-Order Conditions in a Finite Time Horizon
 3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
This is an example to show you how SMath can calculate the movement of kinematic mechanisms.
 Dec :5:6 - Kinemaics model of Simple Arm.sm This file is provided for educaional purposes as guidance for he use of he sofware ool. I is no guaraeed o be free from errors or ommissions. The mehods and
Dec :5:6 - Kinemaics model of Simple Arm.sm This file is provided for educaional purposes as guidance for he use of he sofware ool. I is no guaraeed o be free from errors or ommissions. The mehods and
Sequential Importance Resampling (SIR) Particle Filter
 Particle Filter") Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Numerical Dispersion
 eview of Linear Numerical Sabiliy Numerical Dispersion n he previous lecure, we considered he linear numerical sabiliy of boh advecion and diffusion erms when approimaed wih several spaial and emporal
eview of Linear Numerical Sabiliy Numerical Dispersion n he previous lecure, we considered he linear numerical sabiliy of boh advecion and diffusion erms when approimaed wih several spaial and emporal
KINEMATICS IN ONE DIMENSION
 KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
Data Fusion using Kalman Filter. Ioannis Rekleitis
 Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
EE 435. Lecture 31. Absolute and Relative Accuracy DAC Design. The String DAC
 EE 435 Lecure 3 Absolue and Relaive Accuracy DAC Design The Sring DAC . Review from las lecure. DFT Simulaion from Malab Quanizaion Noise DACs and ADCs generally quanize boh ampliude and ime If convering
EE 435 Lecure 3 Absolue and Relaive Accuracy DAC Design The Sring DAC . Review from las lecure. DFT Simulaion from Malab Quanizaion Noise DACs and ADCs generally quanize boh ampliude and ime If convering
Differential Geometry: Numerical Integration and Surface Flow
 Differenial Geomery: Numerical Inegraion and Surface Flow [Implici Fairing of Irregular Meshes using Diffusion and Curaure Flow. Desbrun e al., 1999] Energy Minimizaion Recall: We hae been considering
Differenial Geomery: Numerical Inegraion and Surface Flow [Implici Fairing of Irregular Meshes using Diffusion and Curaure Flow. Desbrun e al., 1999] Energy Minimizaion Recall: We hae been considering
Some Basic Information about M-S-D Systems
 Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Application of a Stochastic-Fuzzy Approach to Modeling Optimal Discrete Time Dynamical Systems by Using Large Scale Data Processing
 Applicaion of a Sochasic-Fuzzy Approach o Modeling Opimal Discree Time Dynamical Sysems by Using Large Scale Daa Processing AA WALASZE-BABISZEWSA Deparmen of Compuer Engineering Opole Universiy of Technology
Applicaion of a Sochasic-Fuzzy Approach o Modeling Opimal Discree Time Dynamical Sysems by Using Large Scale Daa Processing AA WALASZE-BABISZEWSA Deparmen of Compuer Engineering Opole Universiy of Technology
Pattern Classification and NNet applications with memristive crossbar circuits. Fabien ALIBART D. Strukov s group, ECE-UCSB Now at IEMN-CNRS, France
 Paern Classificaion and NNe applicaions wih memrisive crossbar circuis Fabien ALIBART D. Srukov s group, ECE-UCSB Now a IEMN-CNRS, France Ouline Inroducion: Neural Nework wih memrisive devices Engineering
Paern Classificaion and NNe applicaions wih memrisive crossbar circuis Fabien ALIBART D. Srukov s group, ECE-UCSB Now a IEMN-CNRS, France Ouline Inroducion: Neural Nework wih memrisive devices Engineering
An EM algorithm for maximum likelihood estimation given corrupted observations. E. E. Holmes, National Marine Fisheries Service
 An M algorihm maimum likelihood esimaion given corruped observaions... Holmes Naional Marine Fisheries Service Inroducion M algorihms e likelihood esimaion o cases wih hidden saes such as when observaions
An M algorihm maimum likelihood esimaion given corruped observaions... Holmes Naional Marine Fisheries Service Inroducion M algorihms e likelihood esimaion o cases wih hidden saes such as when observaions
GMM - Generalized Method of Moments
 GMM - Generalized Mehod of Momens Conens GMM esimaion, shor inroducion 2 GMM inuiion: Maching momens 2 3 General overview of GMM esimaion. 3 3. Weighing marix...........................................
GMM - Generalized Mehod of Momens Conens GMM esimaion, shor inroducion 2 GMM inuiion: Maching momens 2 3 General overview of GMM esimaion. 3 3. Weighing marix...........................................
Particle Swarm Optimization Combining Diversification and Intensification for Nonlinear Integer Programming Problems
 Paricle Swarm Opimizaion Combining Diversificaion and Inensificaion for Nonlinear Ineger Programming Problems Takeshi Masui, Masaoshi Sakawa, Kosuke Kao and Koichi Masumoo Hiroshima Universiy 1-4-1, Kagamiyama,
Paricle Swarm Opimizaion Combining Diversificaion and Inensificaion for Nonlinear Ineger Programming Problems Takeshi Masui, Masaoshi Sakawa, Kosuke Kao and Koichi Masumoo Hiroshima Universiy 1-4-1, Kagamiyama,
Pattern Classification (VI) 杜俊
 杜俊") Paern lassificaion VI 杜俊 jundu@usc.edu.cn Ouline Bayesian Decision Theory How o make he oimal decision? Maximum a oserior MAP decision rule Generaive Models Join disribuion of observaion and label sequences
Paern lassificaion VI 杜俊 jundu@usc.edu.cn Ouline Bayesian Decision Theory How o make he oimal decision? Maximum a oserior MAP decision rule Generaive Models Join disribuion of observaion and label sequences
Particle Swarm Optimization
 Paricle Swarm Opimizaion Speaker: Jeng-Shyang Pan Deparmen of Elecronic Engineering, Kaohsiung Universiy of Applied Science, Taiwan Email: jspan@cc.kuas.edu.w 7/26/2004 ppso 1 Wha is he Paricle Swarm Opimizaion
Paricle Swarm Opimizaion Speaker: Jeng-Shyang Pan Deparmen of Elecronic Engineering, Kaohsiung Universiy of Applied Science, Taiwan Email: jspan@cc.kuas.edu.w 7/26/2004 ppso 1 Wha is he Paricle Swarm Opimizaion
Math 333 Problem Set #2 Solution 14 February 2003
 Mah 333 Problem Se #2 Soluion 14 February 2003 A1. Solve he iniial value problem dy dx = x2 + e 3x ; 2y 4 y(0) = 1. Soluion: This is separable; we wrie 2y 4 dy = x 2 + e x dx and inegrae o ge The iniial
Mah 333 Problem Se #2 Soluion 14 February 2003 A1. Solve he iniial value problem dy dx = x2 + e 3x ; 2y 4 y(0) = 1. Soluion: This is separable; we wrie 2y 4 dy = x 2 + e x dx and inegrae o ge The iniial
Simulation-Solving Dynamic Models ABE 5646 Week 2, Spring 2010
 Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
Math 2214 Solution Test 1B Fall 2017
 Mah 14 Soluion Tes 1B Fall 017 Problem 1: A ank has a capaci for 500 gallons and conains 0 gallons of waer wih lbs of sal iniiall. A soluion conaining of 8 lbsgal of sal is pumped ino he ank a 10 galsmin.
Mah 14 Soluion Tes 1B Fall 017 Problem 1: A ank has a capaci for 500 gallons and conains 0 gallons of waer wih lbs of sal iniiall. A soluion conaining of 8 lbsgal of sal is pumped ino he ank a 10 galsmin.
BU Macro BU Macro Fall 2008, Lecture 4
 Dynamic Programming BU Macro 2008 Lecure 4 1 Ouline 1. Cerainy opimizaion problem used o illusrae: a. Resricions on exogenous variables b. Value funcion c. Policy funcion d. The Bellman equaion and an
Dynamic Programming BU Macro 2008 Lecure 4 1 Ouline 1. Cerainy opimizaion problem used o illusrae: a. Resricions on exogenous variables b. Value funcion c. Policy funcion d. The Bellman equaion and an
Course Notes for EE227C (Spring 2018): Convex Optimization and Approximation
: Convex Optimization and Approximation") Course Noes for EE7C Spring 018: Convex Opimizaion and Approximaion Insrucor: Moriz Hard Email: hard+ee7c@berkeley.edu Graduae Insrucor: Max Simchowiz Email: msimchow+ee7c@berkeley.edu Ocober 15, 018 3
Course Noes for EE7C Spring 018: Convex Opimizaion and Approximaion Insrucor: Moriz Hard Email: hard+ee7c@berkeley.edu Graduae Insrucor: Max Simchowiz Email: msimchow+ee7c@berkeley.edu Ocober 15, 018 3
RC, RL and RLC circuits
 Name Dae Time o Complee h m Parner Course/ Secion / Grade RC, RL and RLC circuis Inroducion In his experimen we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors.
Name Dae Time o Complee h m Parner Course/ Secion / Grade RC, RL and RLC circuis Inroducion In his experimen we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors.
Spring Ammar Abu-Hudrouss Islamic University Gaza
 Chaper 7 Reed-Solomon Code Spring 9 Ammar Abu-Hudrouss Islamic Universiy Gaza ١ Inroducion A Reed Solomon code is a special case of a BCH code in which he lengh of he code is one less han he size of he
Chaper 7 Reed-Solomon Code Spring 9 Ammar Abu-Hudrouss Islamic Universiy Gaza ١ Inroducion A Reed Solomon code is a special case of a BCH code in which he lengh of he code is one less han he size of he
) were both constant and we brought them from under the integral.
 were both constant and we brought them from under the integral.") YIELD-PER-RECRUIT (coninued The yield-per-recrui model applies o a cohor, bu we saw in he Age Disribuions lecure ha he properies of a cohor do no apply in general o a collecion of cohors, which is wha
YIELD-PER-RECRUIT (coninued The yield-per-recrui model applies o a cohor, bu we saw in he Age Disribuions lecure ha he properies of a cohor do no apply in general o a collecion of cohors, which is wha
Recursive Least-Squares Fixed-Interval Smoother Using Covariance Information based on Innovation Approach in Linear Continuous Stochastic Systems
 8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
hen found from Bayes rule. Specically, he prior disribuion is given by p( ) = N( ; ^ ; r ) (.3) where r is he prior variance (we add on he random drif
 = N( ; ^ ; r ) (.3) where r is he prior variance (we add on he random drif") Chaper Kalman Filers. Inroducion We describe Bayesian Learning for sequenial esimaion of parameers (eg. means, AR coeciens). The updae procedures are known as Kalman Filers. We show how Dynamic Linear
Chaper Kalman Filers. Inroducion We describe Bayesian Learning for sequenial esimaion of parameers (eg. means, AR coeciens). The updae procedures are known as Kalman Filers. We show how Dynamic Linear
Lecture 3: Exponential Smoothing
 NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
Smoothing. Backward smoother: At any give T, replace the observation yt by a combination of observations at & before T
 Smoohing Consan process Separae signal & noise Smooh he daa: Backward smooher: A an give, replace he observaion b a combinaion of observaions a & before Simple smooher : replace he curren observaion wih
Smoohing Consan process Separae signal & noise Smooh he daa: Backward smooher: A an give, replace he observaion b a combinaion of observaions a & before Simple smooher : replace he curren observaion wih
Module 2 F c i k c s la l w a s o s f dif di fusi s o i n
 Module Fick s laws of diffusion Fick s laws of diffusion and hin film soluion Adolf Fick (1855) proposed: d J α d d d J (mole/m s) flu (m /s) diffusion coefficien and (mole/m 3 ) concenraion of ions, aoms
Module Fick s laws of diffusion Fick s laws of diffusion and hin film soluion Adolf Fick (1855) proposed: d J α d d d J (mole/m s) flu (m /s) diffusion coefficien and (mole/m 3 ) concenraion of ions, aoms
Design of a control system
 SE3 Prof. Davide Manca Poliecnico di Milano Dynamics and Conrol of Chemical Processes Soluion o Lab #3 Design of a conrol sysem Davide Manca Dynamics and Conrol of Chemical Processes Maser Degree in ChemEng
SE3 Prof. Davide Manca Poliecnico di Milano Dynamics and Conrol of Chemical Processes Soluion o Lab #3 Design of a conrol sysem Davide Manca Dynamics and Conrol of Chemical Processes Maser Degree in ChemEng
Essential Microeconomics : OPTIMAL CONTROL 1. Consider the following class of optimization problems
 Essenial Microeconomics -- 6.5: OPIMAL CONROL Consider he following class of opimizaion problems Max{ U( k, x) + U+ ( k+ ) k+ k F( k, x)}. { x, k+ } = In he language of conrol heory, he vecor k is he vecor
Essenial Microeconomics -- 6.5: OPIMAL CONROL Consider he following class of opimizaion problems Max{ U( k, x) + U+ ( k+ ) k+ k F( k, x)}. { x, k+ } = In he language of conrol heory, he vecor k is he vecor
dy dx = xey (a) y(0) = 2 (b) y(1) = 2.5 SOLUTION: See next page
 y(0) = 2 (b) y(1) = 2.5 SOLUTION: See next page") Assignmen 1 MATH 2270 SOLUTION Please wrie ou complee soluions for each of he following 6 problems (one more will sill be added). You may, of course, consul wih your classmaes, he exbook or oher resources,
Assignmen 1 MATH 2270 SOLUTION Please wrie ou complee soluions for each of he following 6 problems (one more will sill be added). You may, of course, consul wih your classmaes, he exbook or oher resources,
Presentation Overview
 Acion Refinemen in Reinforcemen Learning by Probabiliy Smoohing By Thomas G. Dieerich & Didac Busques Speaer: Kai Xu Presenaion Overview Bacground The Probabiliy Smoohing Mehod Experimenal Sudy of Acion
Acion Refinemen in Reinforcemen Learning by Probabiliy Smoohing By Thomas G. Dieerich & Didac Busques Speaer: Kai Xu Presenaion Overview Bacground The Probabiliy Smoohing Mehod Experimenal Sudy of Acion
A Primal-Dual Type Algorithm with the O(1/t) Convergence Rate for Large Scale Constrained Convex Programs
 Convergence Rate for Large Scale Constrained Convex Programs") PROC. IEEE CONFERENCE ON DECISION AND CONTROL, 06 A Primal-Dual Type Algorihm wih he O(/) Convergence Rae for Large Scale Consrained Convex Programs Hao Yu and Michael J. Neely Absrac This paper considers
PROC. IEEE CONFERENCE ON DECISION AND CONTROL, 06 A Primal-Dual Type Algorihm wih he O(/) Convergence Rae for Large Scale Consrained Convex Programs Hao Yu and Michael J. Neely Absrac This paper considers
Learning Objectives: Practice designing and simulating digital circuits including flip flops Experience state machine design procedure
 Lab 4: Synchronous Sae Machine Design Summary: Design and implemen synchronous sae machine circuis and es hem wih simulaions in Cadence Viruoso. Learning Objecives: Pracice designing and simulaing digial
Lab 4: Synchronous Sae Machine Design Summary: Design and implemen synchronous sae machine circuis and es hem wih simulaions in Cadence Viruoso. Learning Objecives: Pracice designing and simulaing digial
Outline of Topics. Analysis of ODE models with MATLAB. What will we learn from this lecture. Aim of analysis: Why such analysis matters?
 of Topics wih MATLAB Shan He School for Compuaional Science Universi of Birmingham Module 6-3836: Compuaional Modelling wih MATLAB Wha will we learn from his lecure Aim of analsis: Aim of analsis. Some
of Topics wih MATLAB Shan He School for Compuaional Science Universi of Birmingham Module 6-3836: Compuaional Modelling wih MATLAB Wha will we learn from his lecure Aim of analsis: Aim of analsis. Some
Neural Networks. Understanding the Brain
 Neural Neworks Threshold unis Neural Neworks Gradien descen Mulilayer neworks Backpropagaion Hidden layer represenaions Example: Face Recogniion Advanced opics And, more Neworks of processing unis (neurons)
Neural Neworks Threshold unis Neural Neworks Gradien descen Mulilayer neworks Backpropagaion Hidden layer represenaions Example: Face Recogniion Advanced opics And, more Neworks of processing unis (neurons)
Sliding Mode Controller for Unstable Systems
 S. SIVARAMAKRISHNAN e al., Sliding Mode Conroller for Unsable Sysems, Chem. Biochem. Eng. Q. 22 (1) 41 47 (28) 41 Sliding Mode Conroller for Unsable Sysems S. Sivaramakrishnan, A. K. Tangirala, and M.
S. SIVARAMAKRISHNAN e al., Sliding Mode Conroller for Unsable Sysems, Chem. Biochem. Eng. Q. 22 (1) 41 47 (28) 41 Sliding Mode Conroller for Unsable Sysems S. Sivaramakrishnan, A. K. Tangirala, and M.
Monitoring and data filtering II. Dynamic Linear Models
 Ouline Monioring and daa filering II. Dynamic Linear Models (Wes and Harrison, chaper 2 Updaing equaions: Kalman Filer Discoun facor as an aid o choose W Incorporae exernal informaion: Inervenion General
Ouline Monioring and daa filering II. Dynamic Linear Models (Wes and Harrison, chaper 2 Updaing equaions: Kalman Filer Discoun facor as an aid o choose W Incorporae exernal informaion: Inervenion General
Stable block Toeplitz matrix for the processing of multichannel seismic data
 Indian Journal of Marine Sciences Vol. 33(3), Sepember 2004, pp. 215-219 Sable block Toepliz marix for he processing of mulichannel seismic daa Kiri Srivasava* & V P Dimri Naional Geophysical Research
Indian Journal of Marine Sciences Vol. 33(3), Sepember 2004, pp. 215-219 Sable block Toepliz marix for he processing of mulichannel seismic daa Kiri Srivasava* & V P Dimri Naional Geophysical Research
Appendix to Online l 1 -Dictionary Learning with Application to Novel Document Detection
 Appendix o Online l -Dicionary Learning wih Applicaion o Novel Documen Deecion Shiva Prasad Kasiviswanahan Huahua Wang Arindam Banerjee Prem Melville A Background abou ADMM In his secion, we give a brief
Appendix o Online l -Dicionary Learning wih Applicaion o Novel Documen Deecion Shiva Prasad Kasiviswanahan Huahua Wang Arindam Banerjee Prem Melville A Background abou ADMM In his secion, we give a brief
Mean Square Projection Error Gradient-based Variable Forgetting Factor FAPI
 3rd Inernaional Conference on Advances in Elecrical and Elecronics Engineering (ICAEE'4) Feb. -, 4 Singapore Mean Square Projecion Error Gradien-based Variable Forgeing Facor FAPI Young-Kwang Seo, Jong-Woo
3rd Inernaional Conference on Advances in Elecrical and Elecronics Engineering (ICAEE'4) Feb. -, 4 Singapore Mean Square Projecion Error Gradien-based Variable Forgeing Facor FAPI Young-Kwang Seo, Jong-Woo
Embedded Systems and Software. A Simple Introduction to Embedded Control Systems (PID Control)
") Embedded Sysems and Sofware A Simple Inroducion o Embedded Conrol Sysems (PID Conrol) Embedded Sysems and Sofware, ECE:3360. The Universiy of Iowa, 2016 Slide 1 Acknowledgemens The maerial in his lecure
Embedded Sysems and Sofware A Simple Inroducion o Embedded Conrol Sysems (PID Conrol) Embedded Sysems and Sofware, ECE:3360. The Universiy of Iowa, 2016 Slide 1 Acknowledgemens The maerial in his lecure
Robotics I. April 11, The kinematics of a 3R spatial robot is specified by the Denavit-Hartenberg parameters in Tab. 1.
 Roboics I April 11, 017 Exercise 1 he kinemaics of a 3R spaial robo is specified by he Denavi-Harenberg parameers in ab 1 i α i d i a i θ i 1 π/ L 1 0 1 0 0 L 3 0 0 L 3 3 able 1: able of DH parameers of
Roboics I April 11, 017 Exercise 1 he kinemaics of a 3R spaial robo is specified by he Denavi-Harenberg parameers in ab 1 i α i d i a i θ i 1 π/ L 1 0 1 0 0 L 3 0 0 L 3 3 able 1: able of DH parameers of
Probabilistic Robotics
 Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Matlab and Python programming: how to get started
 Malab and Pyhon programming: how o ge sared Equipping readers he skills o wrie programs o explore complex sysems and discover ineresing paerns from big daa is one of he main goals of his book. In his chaper,
Malab and Pyhon programming: how o ge sared Equipping readers he skills o wrie programs o explore complex sysems and discover ineresing paerns from big daa is one of he main goals of his book. In his chaper,
Notes on Kalman Filtering
 Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Robust and Learning Control for Complex Systems
 Robus and Learning Conrol for Complex Sysems Peer M. Young Sepember 13, 2007 & Talk Ouline Inroducion Robus Conroller Analysis and Design Theory Experimenal Applicaions Overview MIMO Robus HVAC Conrol
Robus and Learning Conrol for Complex Sysems Peer M. Young Sepember 13, 2007 & Talk Ouline Inroducion Robus Conroller Analysis and Design Theory Experimenal Applicaions Overview MIMO Robus HVAC Conrol
Math 334 Test 1 KEY Spring 2010 Section: 001. Instructor: Scott Glasgow Dates: May 10 and 11.
 1 Mah 334 Tes 1 KEY Spring 21 Secion: 1 Insrucor: Sco Glasgow Daes: Ma 1 and 11. Do NOT wrie on his problem saemen bookle, excep for our indicaion of following he honor code jus below. No credi will be
1 Mah 334 Tes 1 KEY Spring 21 Secion: 1 Insrucor: Sco Glasgow Daes: Ma 1 and 11. Do NOT wrie on his problem saemen bookle, excep for our indicaion of following he honor code jus below. No credi will be
Chapter 7 Response of First-order RL and RC Circuits
 Chaper 7 Response of Firs-order RL and RC Circuis 7.- The Naural Response of RL and RC Circuis 7.3 The Sep Response of RL and RC Circuis 7.4 A General Soluion for Sep and Naural Responses 7.5 Sequenial
Chaper 7 Response of Firs-order RL and RC Circuis 7.- The Naural Response of RL and RC Circuis 7.3 The Sep Response of RL and RC Circuis 7.4 A General Soluion for Sep and Naural Responses 7.5 Sequenial
arxiv: v2 [math.oc] 19 Jun 2016
![arxiv: v2 [math.oc] 19 Jun 2016](/thumbs/94/118066299.jpg "arxiv: v2 [math.oc] 19 Jun 2016") Using Deep Q-Learning o Conrol Opimizaion Hyperparameers Samanha Hansen IBM T.J. Wason Research Cener arxiv:16.6v [mah.oc] 19 Jun 16 Absrac We presen a novel definiion of he reinforcemen learning sae,
Using Deep Q-Learning o Conrol Opimizaion Hyperparameers Samanha Hansen IBM T.J. Wason Research Cener arxiv:16.6v [mah.oc] 19 Jun 16 Absrac We presen a novel definiion of he reinforcemen learning sae,
LAPLACE TRANSFORM AND TRANSFER FUNCTION
 CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION Professor Dae Ryook Yang Spring 2018 Dep. of Chemical and Biological Engineering 5-1 Road Map of he Lecure V Laplace Transform and Transfer funcions
CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION Professor Dae Ryook Yang Spring 2018 Dep. of Chemical and Biological Engineering 5-1 Road Map of he Lecure V Laplace Transform and Transfer funcions
Lesson 3.1 Recursive Sequences
 Lesson 3.1 Recursive Sequences 1) 1. Evaluae he epression 2(3 for each value of. a. 9 b. 2 c. 1 d. 1 2. Consider he sequence of figures made from riangles. Figure 1 Figure 2 Figure 3 Figure a. Complee
Lesson 3.1 Recursive Sequences 1) 1. Evaluae he epression 2(3 for each value of. a. 9 b. 2 c. 1 d. 1 2. Consider he sequence of figures made from riangles. Figure 1 Figure 2 Figure 3 Figure a. Complee
Two Popular Bayesian Estimators: Particle and Kalman Filters. McGill COMP 765 Sept 14 th, 2017
 Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
The average rate of change between two points on a function is d t
 SM Dae: Secion: Objecive: The average rae of change beween wo poins on a funcion is d. For example, if he funcion ( ) represens he disance in miles ha a car has raveled afer hours, hen finding he slope
SM Dae: Secion: Objecive: The average rae of change beween wo poins on a funcion is d. For example, if he funcion ( ) represens he disance in miles ha a car has raveled afer hours, hen finding he slope
04. Kinetics of a second order reaction
 4. Kineics of a second order reacion Imporan conceps Reacion rae, reacion exen, reacion rae equaion, order of a reacion, firs-order reacions, second-order reacions, differenial and inegraed rae laws, Arrhenius
4. Kineics of a second order reacion Imporan conceps Reacion rae, reacion exen, reacion rae equaion, order of a reacion, firs-order reacions, second-order reacions, differenial and inegraed rae laws, Arrhenius
A Forward-Backward Splitting Method with Component-wise Lazy Evaluation for Online Structured Convex Optimization
 A Forward-Backward Spliing Mehod wih Componen-wise Lazy Evaluaion for Online Srucured Convex Opimizaion Yukihiro Togari and Nobuo Yamashia March 28, 2016 Absrac: We consider large-scale opimizaion problems
A Forward-Backward Spliing Mehod wih Componen-wise Lazy Evaluaion for Online Srucured Convex Opimizaion Yukihiro Togari and Nobuo Yamashia March 28, 2016 Absrac: We consider large-scale opimizaion problems
1 Review of Zero-Sum Games
 COS 5: heoreical Machine Learning Lecurer: Rob Schapire Lecure #23 Scribe: Eugene Brevdo April 30, 2008 Review of Zero-Sum Games Las ime we inroduced a mahemaical model for wo player zero-sum games. Any
COS 5: heoreical Machine Learning Lecurer: Rob Schapire Lecure #23 Scribe: Eugene Brevdo April 30, 2008 Review of Zero-Sum Games Las ime we inroduced a mahemaical model for wo player zero-sum games. Any
2.160 System Identification, Estimation, and Learning. Lecture Notes No. 8. March 6, 2006
 2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
Welcome Back to Physics 215!
 Welcome Back o Physics 215! (General Physics I) Thurs. Jan 19 h, 2017 Lecure01-2 1 Las ime: Syllabus Unis and dimensional analysis Today: Displacemen, velociy, acceleraion graphs Nex ime: More acceleraion
Welcome Back o Physics 215! (General Physics I) Thurs. Jan 19 h, 2017 Lecure01-2 1 Las ime: Syllabus Unis and dimensional analysis Today: Displacemen, velociy, acceleraion graphs Nex ime: More acceleraion
Independent component analysis for nonminimum phase systems using H filters
 Independen componen analysis for nonminimum phase sysems using H filers Shuichi Fukunaga, Kenji Fujimoo Deparmen of Mechanical Science and Engineering, Graduae Shool of Engineering, Nagoya Universiy, Furo-cho,
Independen componen analysis for nonminimum phase sysems using H filers Shuichi Fukunaga, Kenji Fujimoo Deparmen of Mechanical Science and Engineering, Graduae Shool of Engineering, Nagoya Universiy, Furo-cho,
Lab 10: RC, RL, and RLC Circuits
 Lab 10: RC, RL, and RLC Circuis In his experimen, we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors. We will sudy he way volages and currens change in
Lab 10: RC, RL, and RLC Circuis In his experimen, we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors. We will sudy he way volages and currens change in
RL Lecture 7: Eligibility Traces. R. S. Sutton and A. G. Barto: Reinforcement Learning: An Introduction 1
 RL Lecure 7: Eligibiliy Traces R. S. Suon and A. G. Baro: Reinforcemen Learning: An Inroducion 1 N-sep TD Predicion Idea: Look farher ino he fuure when you do TD backup (1, 2, 3,, n seps) R. S. Suon and
RL Lecure 7: Eligibiliy Traces R. S. Suon and A. G. Baro: Reinforcemen Learning: An Inroducion 1 N-sep TD Predicion Idea: Look farher ino he fuure when you do TD backup (1, 2, 3,, n seps) R. S. Suon and
The fundamental mass balance equation is ( 1 ) where: I = inputs P = production O = outputs L = losses A = accumulation
 where: I = inputs P = production O = outputs L = losses A = accumulation") Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Hea (iffusion) Equaion erivaion of iffusion Equaion The fundamenal mass balance equaion is I P O L A ( 1 ) where: I inpus P producion O oupus L losses A accumulaion Assume ha no chemical is produced or
Laplace transfom: t-translation rule , Haynes Miller and Jeremy Orloff
 Laplace ransfom: -ranslaion rule 8.03, Haynes Miller and Jeremy Orloff Inroducory example Consider he sysem ẋ + 3x = f(, where f is he inpu and x he response. We know is uni impulse response is 0 for
Laplace ransfom: -ranslaion rule 8.03, Haynes Miller and Jeremy Orloff Inroducory example Consider he sysem ẋ + 3x = f(, where f is he inpu and x he response. We know is uni impulse response is 0 for
SZG Macro 2011 Lecture 3: Dynamic Programming. SZG macro 2011 lecture 3 1
 SZG Macro 2011 Lecure 3: Dynamic Programming SZG macro 2011 lecure 3 1 Background Our previous discussion of opimal consumpion over ime and of opimal capial accumulaion sugges sudying he general decision
SZG Macro 2011 Lecure 3: Dynamic Programming SZG macro 2011 lecure 3 1 Background Our previous discussion of opimal consumpion over ime and of opimal capial accumulaion sugges sudying he general decision
Modal identification of structures from roving input data by means of maximum likelihood estimation of the state space model
 Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
CHAPTER 12 DIRECT CURRENT CIRCUITS
 CHAPTER 12 DIRECT CURRENT CIUITS DIRECT CURRENT CIUITS 257 12.1 RESISTORS IN SERIES AND IN PARALLEL When wo resisors are conneced ogeher as shown in Figure 12.1 we said ha hey are conneced in series. As
CHAPTER 12 DIRECT CURRENT CIUITS DIRECT CURRENT CIUITS 257 12.1 RESISTORS IN SERIES AND IN PARALLEL When wo resisors are conneced ogeher as shown in Figure 12.1 we said ha hey are conneced in series. As