Introduction to Mobile Robotics Summary
|
|
|
- Bennett Osborne
- 6 years ago
- Views:
Transcription


1 Inroducion o Mobile Roboics Summary Wolfram Burgard Cyrill Sachniss Maren Bennewiz Diego Tipaldi Luciano Spinello
2 Probabilisic Roboics 2
3 Probabilisic Roboics Key idea: Eplici represenaion of uncerainy using he calculus of probabiliy heory Percepion = sae esimaion Acion = uiliy opimizaion 3
4 4 Bayes Formula evidence prior likelihood = = = = y P P y P y P P y P y P y P y P
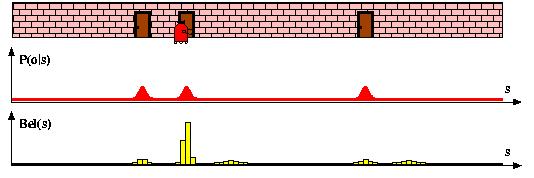
5 Simple Eample of Sae Esimaion Suppose a robo obains measuremen z Wha is Popenz? 5
6 Causal vs. Diagnosic Reasoning Popenz is diagnosic. Pzopen is causal. Ofen causal knowledge is easier o obain. coun frequencies! Bayes rule allows us o use causal knowledge: P open z = P z open P open P z 6
7 7 = d Bel u P z P η Bayes Filers u z u P u z u z P =η Bayes z = observaion u = acion = sae z u z u P Bel = Markov u z u P z P =η Markov = d u z u P u P z P η = d u z u P u z u P z P η Toal prob. Markov = d z z u P u P z P η
8 Bayes Filers are Familiar! Bel = η P z P u Bel d Kalman filers Paricle filers Hidden Markov models Dynamic Bayesian neworks Parially Observable Markov Decision Processes POMDPs 8
9 Sensor and Moion Models P z m P ' u 9


10 Moion Models Robo moion is inherenly uncerain. How can we model his uncerainy? 0
11 Probabilisic Moion Models To implemen he Bayes Filer we need he ransiion model p u. The erm p u specifies a poserior probabiliy ha acion u carries he robo from o.
12 Typical Moion Models In pracice one ofen finds wo ypes of moion models: Odomery-based Velociy-based dead reckoning Odomery-based models are used when sysems are equipped wih wheel encoders. Velociy-based models have o be applied when no wheel encoders are given. They calculae he new pose based on he velociies and he ime elapsed. 2
13 Odomery Model Robo moves from yθ o ' y' θ '. Odomery informaion. u = δ δ δ ro ro2 rans δ rans = 2 ' + y' y δ = aan2 y' y ' θ δ ro = θ θ δ ro2 ' ro 2 δ ro2 yθ δ ro δ rans ' y' θ ' 3
14 Sensors for Mobile Robos Conac sensors: Bumpers Inernal sensors Acceleromeers spring-mouned masses Gyroscopes spinning mass laser ligh Compasses inclinomeers earh magneic field graviy Proimiy sensors Sonar ime of fligh Radar phase and frequency Laser range-finders riangulaion of phase Infrared inensiy Visual sensors: Cameras Saellie-based sensors: GPS 4
15 Beam-based Sensor Model Scan z consiss of K measuremens. z = { z z2... z K Individual measuremens are independen given he robo posiion. } P z m = K k = P z k m 5
16 Beam-based Proimiy Model Measuremen noise Unepeced obsacles 0 z ep z ma 0 z ep z ma P hi z m = η 2πb e z z 2 b 2 ep P unep z m = λz η λ e z < z ep 0 oherwise 6
17 Beam-based Proimiy Model Random measuremen Ma range 0 z ep z ma 0 z ep z ma P rand z m = η z ma P ma z m = η z small 7
18 8 Resuling Miure Densiy = rand ma unep hi rand ma unep hi m z P m z P m z P m z P m z P T α α α α How can we deermine he model parameers?
19 Bayes Filer in Roboics 9
20 Bayes Filers in Acion Discree filers Kalman filers Paricle filers 20
21 Discree Filer The belief is ypically sored in a hisogram / grid represenaion To updae he belief upon sensory inpu and o carry ou he normalizaion one has o ierae over all cells of he grid 2

22 Piecewise Consan 22
23 Kalman Filer Opimal for linear Gaussian sysems! Mos roboics sysems are nonlinear! Polynomial in measuremen dimensionaliy k and sae dimensionaliy n: Ok n 2 23
24 Eended Kalman Filer Performs a linearizaion in each sep No opimal Can diverge if nonlineariies are large! Works surprisingly well even when all assumpions are violaed! Same compleiy han he KF 24
25 Paricle Filer Basic principle Se of sae hypoheses paricles Survival-of-he-fies Paricle filers are a way o efficienly represen non-gaussian disribuion 25
26 Mahemaical Descripion Se of weighed samples Sae hypohesis Imporance weigh The samples represen he poserior 26
27 Paricle Filer Algorihm in Brief Sample he ne generaion for paricles using he proposal disribuion Compue he imporance weighs : weigh = arge disribuion / proposal disribuion Resampling: Replace unlikely samples by more likely ones 27
28 Imporance Sampling Principle We can even use a differen disribuion g o generae samples from f By inroducing an imporance weigh w we can accoun for he differences beween g and f w = f / g f is ofen called arge g is ofen called proposal Pre-condiion: f>0 à g>0 28
29 Paricle Filer Algorihm. Algorihm paricle_filer S - u - z : 2. S 3. For i = n Generae new samples 4. Sample inde ji from he discree disribuion given by w - i j i 5. Sample from p uusing and i i 6. w = p z Compue imporance weigh i 7. η = η + w Updae normalizaion facor i i 8. S = S { < w > } Inser 9. For = η = 0 i = n u i i 0. w = w /η Normalize weighs 29
30 30 draw i - from Bel - draw i from p i - u - Imporance facor for i : disribuion proposal arge disribuion i z p Bel u p Bel u p z p w = = η = d Bel u p z p Bel η Paricle Filer Algorihm
31 Resampling W n- w n w w 2 W n- w n w w 2 w 3 w 3 Roulee wheel Binary search n log n Sochasic universal sampling Sysemaic resampling Linear ime compleiy Easy o implemen low variance 3

32 MCL Eample 32
33 Mapping 33
34 Why Mapping? Learning maps is one of he fundamenal problems in mobile roboics Maps allow robos o efficienly carry ou heir asks allow localizaion Successful robo sysems rely on maps for localizaion pah planning aciviy planning ec 34
35 Occupancy Grid Maps Discreize he world ino equally spaced cells Each cells sores he probabiliy ha he corresponding area is occupied by an obsacle The cells are assumed o be condiionally independen If he pose of he robo is know mapping is easy 35
36 Updaing Occupancy Grid Maps Updae he map cells using he inverse sensor model Bel [ y ] [ y ] P m z u m + [ y ] P m z u [ y ] P m [ y ] Or use he log-odds represenaion [ y ] m [ ] m = y P m Bel [ y ] [ y ] [ y ] [ y ] B m = log odds m z u B m : = logodds m [ y logodds m ] P odds : = [ y ] P + B m Bel 36
37 Reflecion Probabiliy Maps Value of ineres: Preflecsy For every cell coun hisy: number of cases where a beam ended a <y> missesy: number of cases where a beam passed hrough <y> Bel m [ y ] = his his y y + misses y 37
38 SLAM 38

39 The SLAM Problem A robo is eploring an unknown saic environmen. Given: The robo s conrols Observaions of nearby feaures Esimae: Map of feaures Pah of he robo 39
40 Chicken-or-Egg SLAM is a chicken-or-egg problem A map is needed for localizing a robo A good pose esimae is needed o build a map Thus SLAM is regarded as a hard problem in roboics A variey of differen approaches o address he SLAM problem have been presened Probabilisic mehods ouperform mos oher echniques 40
41 SLAM: Simulaneous Localizaion and Mapping Full SLAM: p : m z: u : Esimaes enire pah and map! Online SLAM: p m z : u: = p : m z: u: dd2... d Inegraions ypically done one a a ime Esimaes mos recen pose and map! 4

42 Why is SLAM a hard problem? Robo pose uncerainy In he real world he mapping beween observaions and landmarks is unknown Picking wrong daa associaions can have caasrophic consequences Pose error correlaes daa associaions 42
43 43!!!!!!!!!! " # $ $ $ $ $ $ $ $ $ $ % &!!!!!!!!! " # $ $ $ $ $ $ $ $ $ % & = N N N N N N N N N N N l l l l l l yl l l l l l l l yl l l l l l l l yl l l l l y yl yl yl y y y l l l y N l l l y m Bel θ θ θ θ θ θ θ θ θ θ θ θ Map wih N landmarks:3+2n-dimensional Gaussian Can handle hundreds of dimensions EKF-SLAM
44 EKF-SLAM Map Correlaion mari 44

45 EKF-SLAM Map Correlaion mari 45

46 EKF-SLAM Map Correlaion mari 46
47 FasSLAM Use a paricle filer for map learning Problem: he map is high-dimensional Soluion: separae he esimaion of he robo s rajecory from he one of he map of he environmen This is done by means of a facorizaion in he SLAM poserior ofen called Rao-Blackwellizaion 47
48 Rao-Blackwellizaion poses map observaions & movemens SLAM poserior Robo pah poserior Mapping wih known poses Facorizaion firs inroduced by Murphy in
49 Rao-Blackwellized Mapping Each paricle represens a possible rajecory of he robo Each paricle mainains is own map and updaes i upon mapping wih known poses Each paricle survives wih a probabiliy proporional o he likelihood of he observaions relaive o is own map 49
50 FasSLAM Rao-Blackwellized paricle filering based on landmarks Each landmark is represened by a 22 Eended Kalman Filer EKF Each paricle herefore has o mainain M EKFs Paricle # y θ Landmark Landmark 2 Landmark M Paricle #2 y θ Landmark Landmark 2 Landmark M Paricle N y θ Landmark Landmark 2 Landmark M 50
51 Grid-based FasSLAM Similar ideas can be used o learn grid maps To obain a pracical soluion an efficienly compuable informed proposal disribuion is needed Idea: in he SLAM poserior he observaion model dominaes he moion model given an accurae sensor 5
52 Proposal Disribuion Approimae his equaion by a Gaussian: maimum repored by a scan macher Gaussian approimaion Sampled poins around he maimum Draw ne generaion of samples 52




53 Typical Resuls 53
54 Robo Moion 54
55 Robo Moion Planning Laombe 99: eminenly necessary since by definiion a robo accomplishes asks by moving in he real world. Goals: Collision-free rajecories. Robo should reach he goal locaion as fas as possible. 55
56 Two Challenges Calculae he opimal pah aking poenial uncerainies in he acions ino accoun Quickly generae acions in he case of unforeseen objecs 56


57 Classic Two-layered Archiecure Planning low frequency map sub-goal Collision Avoidance high frequency sensor daa moion command robo 57

58 Muli-Robo Eploraion Given: Unknown environmen Team of robos Task: Coordinae he robos o efficienly learn a complee map of he environmen Compleiy: NP-hard for single robos in known graph-like environmens Eponenial in he number of robos 58
59 Levels of Coordinaion No echange of informaion Implici coordinaion: Sharing a join map [Yamauchi e.al 98] Communicaion of he individual maps and poses Cenral mapping sysem Eplici coordinaion: Deermine beer arge locaions o disribue he robos Cenral planner for arge poin assignmen 59
60 The Coordinaion Algorihm informal. Deermine he fronier cells. 2. Compue for each robo he cos for reaching each fronier cell. 3. Choose he robo wih he opimal overall evaluaion and assign he corresponding arge poin o i. 4. Reduce he uiliy of he fronier cells visible from ha arge poin. 5. If here is one robo lef go o 3. 60
61 Informaion Gain-based Eploraion SLAM is ypically passive because i consumes incoming sensor daa Eploraion acively guides he robo o cover he environmen wih is sensors Eploraion in combinaion wih SLAM: Acing under pose and map uncerainy Uncerainy should/needs o be aken ino accoun when selecing an acion Key quesion: Where o move ne? 6
62 Muual Informaion The muual informaion I is given by he reducion of enropy in he belief acion o be carried ou uncerainy of he filer uncerainy of he filer afer carrying ou acion a
63 Inegraing Over Observaions Compuing he muual informaion requires o inegrae over poenial observaions poenial observaion sequences



64 Inegral Approimaion The paricle filer represens a poserior abou possible maps map of paricle map of paricle 2 map of paricle 3
65 Inegral Approimaion The paricle filer represens a poserior abou possible maps Simulae laser measuremens in he maps of he paricles measuremen sequences simulaed in he maps likelihood paricle weigh
66 Summary on Informaion Gainbased Eploraion A decision-heoreic approach o eploraion in he cone of RBPF-SLAM The approach uilizes he facorizaion of he Rao-Blackwellizaion o efficienly calculae he epeced informaion gain Reasons abou measuremens obained along he pah of he robo Considers a reduced acion se consising of eploraion loop-closing and placerevisiing acions 66
67 The Eam is Approaching This lecure gave a shor overview over he mos imporan opics addressed in his course For he eam you need o know a leas he basic formulas e.g. Bayes filer MCL eqs. Rao-Blackwellizaion enropy Good luck for he eam! 67
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
CSE-473. A Gentle Introduction to Particle Filters
 CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
CSE-571 Robotics. Sample-based Localization (sonar) Motivation. Bayes Filter Implementations. Particle filters. Density Approximation
 Motivation. Bayes Filter Implementations. Particle filters. Density Approximation") Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Introduction to Mobile Robotics
 Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
Probabilistic Robotics
 Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Anno accademico 2006/2007. Davide Migliore
 Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Sequential Importance Resampling (SIR) Particle Filter
 Particle Filter") Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
7630 Autonomous Robotics Probabilistic Localisation
 7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Robot Motion Model EKF based Localization EKF SLAM Graph SLAM
 Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
2016 Possible Examination Questions. Robotics CSCE 574
 206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
Two Popular Bayesian Estimators: Particle and Kalman Filters. McGill COMP 765 Sept 14 th, 2017
 Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Recursive Bayes Filtering Advanced AI
 Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Announcements. Recap: Filtering. Recap: Reasoning Over Time. Example: State Representations for Robot Localization. Particle Filtering
 Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
Estimation of Poses with Particle Filters
 Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
SEIF, EnKF, EKF SLAM. Pieter Abbeel UC Berkeley EECS
 SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
Using the Kalman filter Extended Kalman filter
 Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Simultaneous Localisation and Mapping. IAR Lecture 10 Barbara Webb
 Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
Fundamental Problems In Robotics
 Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Localization. Mobile robot localization is the problem of determining the pose of a robot relative to a given map of the environment.
 Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
EKF SLAM vs. FastSLAM A Comparison
 vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
Localization and Map Making
 Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
Data Fusion using Kalman Filter. Ioannis Rekleitis
 Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
AUTONOMOUS SYSTEMS. Probabilistic Robotics Basics Kalman Filters Particle Filters. Sebastian Thrun
 AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Probabilistic Fundamentals in Robotics
 Probabilisic Fundamenals in Roboics Probabilisic Models of Mobile Robos Robo localizaion Basilio Bona DAUIN Poliecnico di Torino Course Ouline Basic mahemaical framework Probabilisic models of mobile robos
Probabilisic Fundamenals in Roboics Probabilisic Models of Mobile Robos Robo localizaion Basilio Bona DAUIN Poliecnico di Torino Course Ouline Basic mahemaical framework Probabilisic models of mobile robos
Uncertainty & Localization I
 Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Overview. COMP14112: Artificial Intelligence Fundamentals. Lecture 0 Very Brief Overview. Structure of this course
 OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
Applications in Industry (Extended) Kalman Filter. Week Date Lecture Title
 Kalman Filter. Week Date Lecture Title") hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
Probabilistic Robotics Sebastian Thrun-- Stanford
 robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
Probabilistic Robotics The Sparse Extended Information Filter
 Probabilisic Roboics The Sparse Exended Informaion Filer MSc course Arificial Inelligence 2018 hps://saff.fnwi.uva.nl/a.visser/educaion/probabilisicroboics/ Arnoud Visser Inelligen Roboics Lab Informaics
Probabilisic Roboics The Sparse Exended Informaion Filer MSc course Arificial Inelligence 2018 hps://saff.fnwi.uva.nl/a.visser/educaion/probabilisicroboics/ Arnoud Visser Inelligen Roboics Lab Informaics
Augmented Reality II - Kalman Filters - Gudrun Klinker May 25, 2004
 Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Simultaneous Localization and Mapping with Unknown Data Association Using FastSLAM
 Simulaneous Localizaion and Mapping wih Unknown Daa Associaion Using FasSLAM Michael Monemerlo, Sebasian Thrun Absrac The Exended Kalman Filer (EKF has been he de faco approach o he Simulaneous Localizaion
Simulaneous Localizaion and Mapping wih Unknown Daa Associaion Using FasSLAM Michael Monemerlo, Sebasian Thrun Absrac The Exended Kalman Filer (EKF has been he de faco approach o he Simulaneous Localizaion
Mapping in Dynamic Environments
 Mapping in Dynaic Environens Wolfra Burgard Universiy of Freiburg, Gerany Mapping is a Key Technology for Mobile Robos Robos can robusly navigae when hey have a ap. Robos have been shown o being able o
Mapping in Dynaic Environens Wolfra Burgard Universiy of Freiburg, Gerany Mapping is a Key Technology for Mobile Robos Robos can robusly navigae when hey have a ap. Robos have been shown o being able o
An introduction to the theory of SDDP algorithm
 An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
Temporal probability models
 Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Chapter 14. (Supplementary) Bayesian Filtering for State Estimation of Dynamic Systems
 Bayesian Filtering for State Estimation of Dynamic Systems") Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
Notes on Kalman Filtering
 Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
m = 41 members n = 27 (nonfounders), f = 14 (founders) 8 markers from chromosome 19
, f = 14 (founders) 8 markers from chromosome 19") Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Temporal probability models. Chapter 15, Sections 1 5 1
 Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
FastSLAM: An Efficient Solution to the Simultaneous Localization And Mapping Problem with Unknown Data Association
 FasSLAM: An Efficien Soluion o he Simulaneous Localizaion And Mapping Problem wih Unknown Daa Associaion Sebasian Thrun 1, Michael Monemerlo 1, Daphne Koller 1, Ben Wegbrei 1 Juan Nieo 2, and Eduardo Nebo
FasSLAM: An Efficien Soluion o he Simulaneous Localizaion And Mapping Problem wih Unknown Daa Associaion Sebasian Thrun 1, Michael Monemerlo 1, Daphne Koller 1, Ben Wegbrei 1 Juan Nieo 2, and Eduardo Nebo
Fixed-lag Sampling Strategies for Particle Filtering SLAM
 To appear in he 7 IEEE Inernaional Conference on Roboics & Auomaion (ICRA 7) Fixed-lag Sampling Sraegies for Paricle Filering SLAM Krisopher R. Beevers and Wesley H. Huang Absrac We describe wo new sampling
To appear in he 7 IEEE Inernaional Conference on Roboics & Auomaion (ICRA 7) Fixed-lag Sampling Sraegies for Paricle Filering SLAM Krisopher R. Beevers and Wesley H. Huang Absrac We describe wo new sampling
Georey E. Hinton. University oftoronto. Technical Report CRG-TR February 22, Abstract
 Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Speech and Language Processing
 Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Object tracking: Using HMMs to estimate the geographical location of fish
 Objec racking: Using HMMs o esimae he geographical locaion of fish 02433 - Hidden Markov Models Marin Wæver Pedersen, Henrik Madsen Course week 13 MWP, compiled June 8, 2011 Objecive: Locae fish from agging
Objec racking: Using HMMs o esimae he geographical locaion of fish 02433 - Hidden Markov Models Marin Wæver Pedersen, Henrik Madsen Course week 13 MWP, compiled June 8, 2011 Objecive: Locae fish from agging
Lab #2: Kinematics in 1-Dimension
 Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
Tracking. Announcements
 Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Monte Carlo data association for multiple target tracking
 Mone Carlo daa associaion for muliple arge racking Rickard Karlsson Dep. of Elecrical Engineering Linköping Universiy SE-58183 Linköping, Sweden E-mail: rickard@isy.liu.se Fredrik Gusafsson Dep. of Elecrical
Mone Carlo daa associaion for muliple arge racking Rickard Karlsson Dep. of Elecrical Engineering Linköping Universiy SE-58183 Linköping, Sweden E-mail: rickard@isy.liu.se Fredrik Gusafsson Dep. of Elecrical
Algorithms for Sensor-Based Robotics: Kalman Filters for Mapping and Localization
 Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Look-ahead Proposals for Robust Grid-based SLAM
 Look-ahead Proposals for Robus Grid-based SLAM Slawomir Grzonka, Chrisian Plagemann, Giorgio Grisei, Wolfram Burgard To cie his version: Slawomir Grzonka, Chrisian Plagemann, Giorgio Grisei, Wolfram Burgard.
Look-ahead Proposals for Robus Grid-based SLAM Slawomir Grzonka, Chrisian Plagemann, Giorgio Grisei, Wolfram Burgard To cie his version: Slawomir Grzonka, Chrisian Plagemann, Giorgio Grisei, Wolfram Burgard.
3.1.3 INTRODUCTION TO DYNAMIC OPTIMIZATION: DISCRETE TIME PROBLEMS. A. The Hamiltonian and First-Order Conditions in a Finite Time Horizon
 3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
Multi-Robot Simultaneous Localization and Mapping (Multi-SLAM)
") Muli-Robo Simulaneous Localizaion and Mapping (Muli-SLAM) Kai-Chieh Ma, Zhibei Ma Absrac In his projec, we are ineresed in he exension of Simulaneous Localizaion and Mapping (SLAM) o muliple robos. By
Muli-Robo Simulaneous Localizaion and Mapping (Muli-SLAM) Kai-Chieh Ma, Zhibei Ma Absrac In his projec, we are ineresed in he exension of Simulaneous Localizaion and Mapping (SLAM) o muliple robos. By
Assisted Teleoperation of Quadcopters Using Obstacle Avoidance
 Assised Teleoperaion of Quadcopers Using Obsacle Avoidance Received 0 h Ocober 202; acceped 22 nd November 202. João Mendes, Rodrigo Venura Absrac: Teleoperaion of unmanned aerial vehicles ofen demands
Assised Teleoperaion of Quadcopers Using Obsacle Avoidance Received 0 h Ocober 202; acceped 22 nd November 202. João Mendes, Rodrigo Venura Absrac: Teleoperaion of unmanned aerial vehicles ofen demands
Simulation-Solving Dynamic Models ABE 5646 Week 2, Spring 2010
 Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
FastSLAM with Stereo Vision
 FasSLAM wih Sereo Vision Wikus Brink Elecronic Sysems Lab Elecrical and Elecronic Engineering Sellenbosch Universiy Email: wikusbrink@ieee.org Corné E. van Daalen Elecronic Sysems Lab Elecrical and Elecronic
FasSLAM wih Sereo Vision Wikus Brink Elecronic Sysems Lab Elecrical and Elecronic Engineering Sellenbosch Universiy Email: wikusbrink@ieee.org Corné E. van Daalen Elecronic Sysems Lab Elecrical and Elecronic
A PROBABILISTIC MULTIMODAL ALGORITHM FOR TRACKING MULTIPLE AND DYNAMIC OBJECTS
 A PROBABILISTIC MULTIMODAL ALGORITHM FOR TRACKING MULTIPLE AND DYNAMIC OBJECTS MARTA MARRÓN, ELECTRONICS. ALCALÁ UNIV. SPAIN mara@depeca.uah.es MIGUEL A. SOTELO, ELECTRONICS. ALCALÁ UNIV. SPAIN soelo@depeca.uah.es
A PROBABILISTIC MULTIMODAL ALGORITHM FOR TRACKING MULTIPLE AND DYNAMIC OBJECTS MARTA MARRÓN, ELECTRONICS. ALCALÁ UNIV. SPAIN mara@depeca.uah.es MIGUEL A. SOTELO, ELECTRONICS. ALCALÁ UNIV. SPAIN soelo@depeca.uah.es
Open loop vs Closed Loop. Example: Open Loop. Example: Feedforward Control. Advanced Control I
 Open loop vs Closed Loop Advanced I Moor Command Movemen Overview Open Loop vs Closed Loop Some examples Useful Open Loop lers Dynamical sysems CPG (biologically inspired ), Force Fields Feedback conrol
Open loop vs Closed Loop Advanced I Moor Command Movemen Overview Open Loop vs Closed Loop Some examples Useful Open Loop lers Dynamical sysems CPG (biologically inspired ), Force Fields Feedback conrol
Hidden Markov Models
 Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Data Assimilation. Alan O Neill National Centre for Earth Observation & University of Reading
 Daa Assimilaion Alan O Neill Naional Cenre for Earh Observaion & Universiy of Reading Conens Moivaion Univariae scalar) daa assimilaion Mulivariae vecor) daa assimilaion Opimal Inerpoleion BLUE) 3d-Variaional
Daa Assimilaion Alan O Neill Naional Cenre for Earh Observaion & Universiy of Reading Conens Moivaion Univariae scalar) daa assimilaion Mulivariae vecor) daa assimilaion Opimal Inerpoleion BLUE) 3d-Variaional
CS 4495 Computer Vision Tracking 1- Kalman,Gaussian
 CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
Introduction to Bayesian Estimation. McGill COMP 765 Sept 12 th, 2017
 Inrodcion o Baesian Esimaion McGill COM 765 Sep 2 h 207 Where am I? or firs core problem Las class: We can model a robo s moions and he world as spaial qaniies These are no perfec and herefore i is p o
Inrodcion o Baesian Esimaion McGill COM 765 Sep 2 h 207 Where am I? or firs core problem Las class: We can model a robo s moions and he world as spaial qaniies These are no perfec and herefore i is p o
Improved Rao-Blackwellized H filter based mobile robot SLAM
 Ocober 216, 23(5): 47 55 www.sciencedirec.com/science/journal/158885 The Journal of China Universiies of Poss and Telecommunicaions hp://jcup.bup.edu.cn Improved Rao-Blackwellized H filer based mobile
Ocober 216, 23(5): 47 55 www.sciencedirec.com/science/journal/158885 The Journal of China Universiies of Poss and Telecommunicaions hp://jcup.bup.edu.cn Improved Rao-Blackwellized H filer based mobile
Numerical Dispersion
 eview of Linear Numerical Sabiliy Numerical Dispersion n he previous lecure, we considered he linear numerical sabiliy of boh advecion and diffusion erms when approimaed wih several spaial and emporal
eview of Linear Numerical Sabiliy Numerical Dispersion n he previous lecure, we considered he linear numerical sabiliy of boh advecion and diffusion erms when approimaed wih several spaial and emporal
2001 November 15 Exam III Physics 191
 1 November 15 Eam III Physics 191 Physical Consans: Earh s free-fall acceleraion = g = 9.8 m/s 2 Circle he leer of he single bes answer. quesion is worh 1 poin Each 3. Four differen objecs wih masses:
1 November 15 Eam III Physics 191 Physical Consans: Earh s free-fall acceleraion = g = 9.8 m/s 2 Circle he leer of he single bes answer. quesion is worh 1 poin Each 3. Four differen objecs wih masses:
Tom Heskes and Onno Zoeter. Presented by Mark Buller
 Tom Heskes and Onno Zoeer Presened by Mark Buller Dynamic Bayesian Neworks Direced graphical models of sochasic processes Represen hidden and observed variables wih differen dependencies Generalize Hidden
Tom Heskes and Onno Zoeer Presened by Mark Buller Dynamic Bayesian Neworks Direced graphical models of sochasic processes Represen hidden and observed variables wih differen dependencies Generalize Hidden
2.160 System Identification, Estimation, and Learning. Lecture Notes No. 8. March 6, 2006
 2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
Anti-Disturbance Control for Multiple Disturbances
 Workshop a 3 ACC Ani-Disurbance Conrol for Muliple Disurbances Lei Guo (lguo@buaa.edu.cn) Naional Key Laboraory on Science and Technology on Aircraf Conrol, Beihang Universiy, Beijing, 9, P.R. China. Presened
Workshop a 3 ACC Ani-Disurbance Conrol for Muliple Disurbances Lei Guo (lguo@buaa.edu.cn) Naional Key Laboraory on Science and Technology on Aircraf Conrol, Beihang Universiy, Beijing, 9, P.R. China. Presened
CONTROL SYSTEMS, ROBOTICS AND AUTOMATION Vol. XI Control of Stochastic Systems - P.R. Kumar
 CONROL OF SOCHASIC SYSEMS P.R. Kumar Deparmen of Elecrical and Compuer Engineering, and Coordinaed Science Laboraory, Universiy of Illinois, Urbana-Champaign, USA. Keywords: Markov chains, ransiion probabiliies,
CONROL OF SOCHASIC SYSEMS P.R. Kumar Deparmen of Elecrical and Compuer Engineering, and Coordinaed Science Laboraory, Universiy of Illinois, Urbana-Champaign, USA. Keywords: Markov chains, ransiion probabiliies,
Ensamble methods: Bagging and Boosting
 Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
From Particles to Rigid Bodies
 Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
Excel-Based Solution Method For The Optimal Policy Of The Hadley And Whittin s Exact Model With Arma Demand
 Excel-Based Soluion Mehod For The Opimal Policy Of The Hadley And Whiin s Exac Model Wih Arma Demand Kal Nami School of Business and Economics Winson Salem Sae Universiy Winson Salem, NC 27110 Phone: (336)750-2338
Excel-Based Soluion Mehod For The Opimal Policy Of The Hadley And Whiin s Exac Model Wih Arma Demand Kal Nami School of Business and Economics Winson Salem Sae Universiy Winson Salem, NC 27110 Phone: (336)750-2338
A Bayesian Approach to Spectral Analysis
 Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
Written HW 9 Sol. CS 188 Fall Introduction to Artificial Intelligence
 CS 188 Fall 2018 Inroducion o Arificial Inelligence Wrien HW 9 Sol. Self-assessmen due: Tuesday 11/13/2018 a 11:59pm (submi via Gradescope) For he self assessmen, fill in he self assessmen boxes in your
CS 188 Fall 2018 Inroducion o Arificial Inelligence Wrien HW 9 Sol. Self-assessmen due: Tuesday 11/13/2018 a 11:59pm (submi via Gradescope) For he self assessmen, fill in he self assessmen boxes in your
Module 2 F c i k c s la l w a s o s f dif di fusi s o i n
 Module Fick s laws of diffusion Fick s laws of diffusion and hin film soluion Adolf Fick (1855) proposed: d J α d d d J (mole/m s) flu (m /s) diffusion coefficien and (mole/m 3 ) concenraion of ions, aoms
Module Fick s laws of diffusion Fick s laws of diffusion and hin film soluion Adolf Fick (1855) proposed: d J α d d d J (mole/m s) flu (m /s) diffusion coefficien and (mole/m 3 ) concenraion of ions, aoms
Decentralized Stochastic Control with Partial History Sharing: A Common Information Approach
 1 Decenralized Sochasic Conrol wih Parial Hisory Sharing: A Common Informaion Approach Ashuosh Nayyar, Adiya Mahajan and Demoshenis Tenekezis arxiv:1209.1695v1 [cs.sy] 8 Sep 2012 Absrac A general model
1 Decenralized Sochasic Conrol wih Parial Hisory Sharing: A Common Informaion Approach Ashuosh Nayyar, Adiya Mahajan and Demoshenis Tenekezis arxiv:1209.1695v1 [cs.sy] 8 Sep 2012 Absrac A general model
Graphical Event Models and Causal Event Models. Chris Meek Microsoft Research
 Graphical Even Models and Causal Even Models Chris Meek Microsof Research Graphical Models Defines a join disribuion P X over a se of variables X = X 1,, X n A graphical model M =< G, Θ > G =< X, E > is
Graphical Even Models and Causal Even Models Chris Meek Microsof Research Graphical Models Defines a join disribuion P X over a se of variables X = X 1,, X n A graphical model M =< G, Θ > G =< X, E > is
Ground Rules. PC1221 Fundamentals of Physics I. Kinematics. Position. Lectures 3 and 4 Motion in One Dimension. A/Prof Tay Seng Chuan
 Ground Rules PC11 Fundamenals of Physics I Lecures 3 and 4 Moion in One Dimension A/Prof Tay Seng Chuan 1 Swich off your handphone and pager Swich off your lapop compuer and keep i No alking while lecure
Ground Rules PC11 Fundamenals of Physics I Lecures 3 and 4 Moion in One Dimension A/Prof Tay Seng Chuan 1 Swich off your handphone and pager Swich off your lapop compuer and keep i No alking while lecure
AUV positioning based on Interactive Multiple Model
 AUV posiioning based on Ineracive Muliple Model H. Q. Liu ARL, Tropical Marine Science Insiue Naional Universiy of Singapore 18 Ken Ridge Road, Singapore 1197 Email: hongqing@arl.nus.edu.sg Mandar Chire
AUV posiioning based on Ineracive Muliple Model H. Q. Liu ARL, Tropical Marine Science Insiue Naional Universiy of Singapore 18 Ken Ridge Road, Singapore 1197 Email: hongqing@arl.nus.edu.sg Mandar Chire
Kalman filtering for maximum likelihood estimation given corrupted observations.
 alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
Decentralized Particle Filter with Arbitrary State Decomposition
 1 Decenralized Paricle Filer wih Arbirary Sae Decomposiion Tianshi Chen, Member, IEEE, Thomas B. Schön, Member, IEEE, Henrik Ohlsson, Member, IEEE, and Lennar Ljung, Fellow, IEEE Absrac In his paper, a
1 Decenralized Paricle Filer wih Arbirary Sae Decomposiion Tianshi Chen, Member, IEEE, Thomas B. Schön, Member, IEEE, Henrik Ohlsson, Member, IEEE, and Lennar Ljung, Fellow, IEEE Absrac In his paper, a
Speaker Adaptation Techniques For Continuous Speech Using Medium and Small Adaptation Data Sets. Constantinos Boulis
 Speaker Adapaion Techniques For Coninuous Speech Using Medium and Small Adapaion Daa Ses Consaninos Boulis Ouline of he Presenaion Inroducion o he speaker adapaion problem Maximum Likelihood Sochasic Transformaions
Speaker Adapaion Techniques For Coninuous Speech Using Medium and Small Adapaion Daa Ses Consaninos Boulis Ouline of he Presenaion Inroducion o he speaker adapaion problem Maximum Likelihood Sochasic Transformaions
Block Diagram of a DCS in 411
 Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Self assessment due: Monday 4/29/2019 at 11:59pm (submit via Gradescope)
") CS 188 Spring 2019 Inroducion o Arificial Inelligence Wrien HW 10 Due: Monday 4/22/2019 a 11:59pm (submi via Gradescope). Leave self assessmen boxes blank for his due dae. Self assessmen due: Monday 4/29/2019
CS 188 Spring 2019 Inroducion o Arificial Inelligence Wrien HW 10 Due: Monday 4/22/2019 a 11:59pm (submi via Gradescope). Leave self assessmen boxes blank for his due dae. Self assessmen due: Monday 4/29/2019
Kriging Models Predicting Atrazine Concentrations in Surface Water Draining Agricultural Watersheds
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
Recent Developments In Evolutionary Data Assimilation And Model Uncertainty Estimation For Hydrologic Forecasting Hamid Moradkhani
 Feb 6-8, 208 Recen Developmens In Evoluionary Daa Assimilaion And Model Uncerainy Esimaion For Hydrologic Forecasing Hamid Moradkhani Cener for Complex Hydrosysems Research Deparmen of Civil, Consrucion
Feb 6-8, 208 Recen Developmens In Evoluionary Daa Assimilaion And Model Uncerainy Esimaion For Hydrologic Forecasing Hamid Moradkhani Cener for Complex Hydrosysems Research Deparmen of Civil, Consrucion
Monte Carlo Sampling of Non-Gaussian Proposal Distribution in Feature-Based RBPF-SLAM
 Proceedings of Ausralasian Conference on Roboics and Auomaion, 3-5 Dec 2012, Vicoria Universiy of Wellingon, New Zealand. Mone Carlo Sampling of Non-Gaussian Proposal Disribuion in Feaure-Based RBPF-SLAM
Proceedings of Ausralasian Conference on Roboics and Auomaion, 3-5 Dec 2012, Vicoria Universiy of Wellingon, New Zealand. Mone Carlo Sampling of Non-Gaussian Proposal Disribuion in Feaure-Based RBPF-SLAM
In this chapter the model of free motion under gravity is extended to objects projected at an angle. When you have completed it, you should
 Cambridge Universiy Press 978--36-60033-7 Cambridge Inernaional AS and A Level Mahemaics: Mechanics Coursebook Excerp More Informaion Chaper The moion of projeciles In his chaper he model of free moion
Cambridge Universiy Press 978--36-60033-7 Cambridge Inernaional AS and A Level Mahemaics: Mechanics Coursebook Excerp More Informaion Chaper The moion of projeciles In his chaper he model of free moion
Non-parametric techniques. Instance Based Learning. NN Decision Boundaries. Nearest Neighbor Algorithm. Distance metric important
 on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LTU, decision
on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LTU, decision
Deep Learning: Theory, Techniques & Applications - Recurrent Neural Networks -
 Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics
Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM
 WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
Non-parametric techniques. Instance Based Learning. NN Decision Boundaries. Nearest Neighbor Algorithm. Distance metric important
 on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LDA, logisic
on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LDA, logisic
Modeling of vision based robot formation control using fuzzy logic controller and extended Kalman filter
 Inernaional Journal of Fuzzy Logic and Inelligen Sysems, vol. 2, no. 3, Sepember 22, pp. 238-244 hp://dx.doi.org/.539/ijfis.22.2.3.238 pissn 598-2645 eissn 293-744X Modeling of vision based robo formaion
Inernaional Journal of Fuzzy Logic and Inelligen Sysems, vol. 2, no. 3, Sepember 22, pp. 238-244 hp://dx.doi.org/.539/ijfis.22.2.3.238 pissn 598-2645 eissn 293-744X Modeling of vision based robo formaion
Ensamble methods: Boosting
 Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room
Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room