Machine Learning Reinforcement Learning
|
|
|
- Norma Moore
- 6 years ago
- Views:
Transcription
1 Mchine Lerning Reinforcemen Lerning Leon 2

2 Mchine Lerning
3 Mchine Lerning Supervied Lerning Techer ell lerner wh o remember Reinforcemen Lerning Environmen provide hin o lerner Unupervied Lerning Lerner dicover on i own
4 Reinforcemen Lerning Wh mke RL differen from oher ML prdigm? There i no ny upervior only rewrd ignl Feedbck i delyed no innneou Sequenil d (no i.i.d. d ime dependendency) Agen cion ffec he ubequen d i receive Mchine Lerning 207 Compuer Science & Engineering Univeriy of Ionnin ML2 ( 4 )
5 A muli-diciplinry field Arificil Inelligence Pychology Auomic Conrol nd Operion Reerch Reinforcemen Lerning (RL) Neurocience Siic 5
6 Lerning (Pychology) Reinforcemen for rining niml Negive reinforcemen: Pin nd Hunger Poiive reinforcemen: Pleure nd food deciion environmen Opern condiioning (Ivn Pvlov 927) proce by which humn nd niml lern o behve in uch wy o obin rewrd nd void punihmen Compuionl neurocience Hebbin lerning (96): ynpic weigh beween neuron re reinforced by imulneouly civion.
7 Reinforcemen Lerning Lerning bou from nd while inercing wih n exernl environmen Lerning wh o do o o mximize numericl rewrd ignl Lerner i no old wh cion o ke bu mu dicover hem by rying hem ou nd eeing wh he rewrd i. A ochic opimizion over ime Imporn difference from clificion (no exmple of correc nwer mu ry hing)



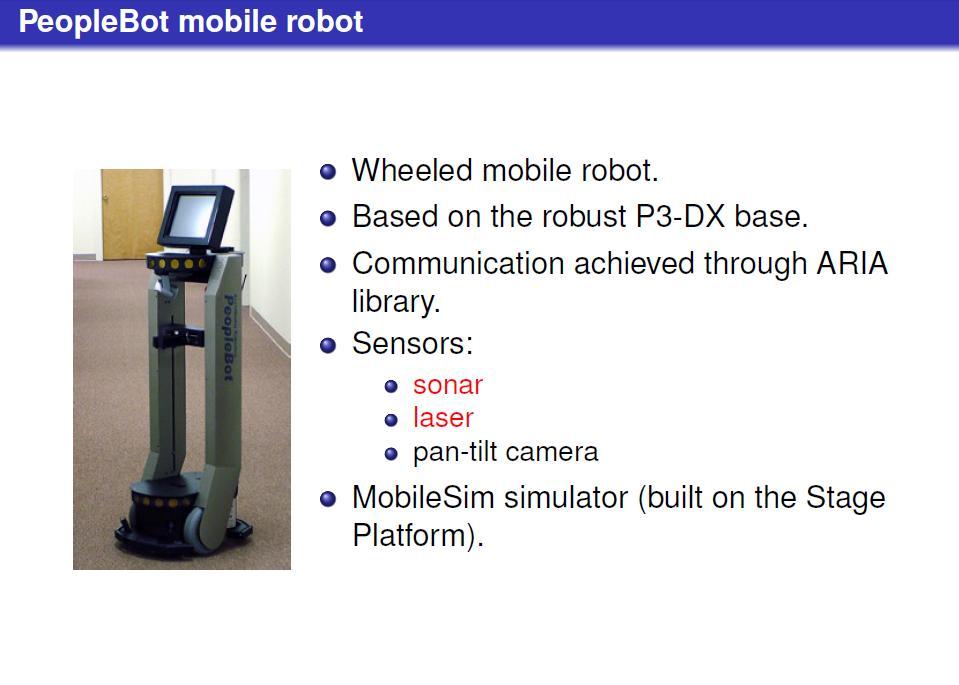
8 Exmple of Reinforcemen Lerning pplicion How hould robo behve o o opimize i performnce (Roboic) How o uome he moion of drone? (Conrol Theory) How o mke good cheplying progrm (Arificil Inelligence)

 25299 ciion!")
9 Reinforcemen Lerning Richrd. S. Suon Profeor nd icore chir MIT Pre Deprmen of Compuing Science ediion nd ediion in progre (207) Univeriy of Alber hp://incompleeide.ne/uon/book/bookdrf206ep.pdf Cnd (Pychology & Compuer Science) ciion!!!!! (Google cholr ody ) ciion in ol Bihop book h ciion!!!!!






10 Reinforcemen Lerning ciion in ol ciion in ol ciion!!!! 205
11 Agen wih Inelligen Behvior Gme-plying: Sequence of move o win gme (e.g. Che Bckgmmon) Robo in mze: Sequence of cion o find gol (e.g. poiion or objec) Auonomou vehicle conrol Lerning o chooe cion o opimize fcory oupu (procedure) Recommendion Syem (li) Rouing problem: Medicl ril / Pcke / Ad plcemen. (mny more).
12 Inelligen Behvior Agen receive enory inpu nd ke cion in environmen Aume he gen receive rewrd (or penlie/loe) The gol i o mximize he rewrd i receive (or minimize he loe) Chooing cion h minimize loe i equivlen o behve opimlly

13
14 Deciion Theory Del wih he problem of mking opiml deciion Deciion or cion h minimize n expeced lo Aume k poible cion: k. Aume lo he world cn be in one of m differen e m. If we ke cion j nd we re in e i lo l ij i ppered Given ll oberved d D nd prior knowledge B our belief bou he e of he world re ummrized by: Opiml cion i h i expeced o minimize lo * rg min p D m j i l ij B p i D B
15 Deciion Theory (II) Byein equenil deciion heory (iic) Opiml conrol heory (engineering) Reinforcemen Lerning (compuer cience) Opiml cion i he one which i expeced o minimize lo * rg min m j i l ij p i D B Thi i how o mke ingle deciion. How do e mke equence of deciion in order o chieve long-erm gol? Aume we know he loe for ech cion-e pir we need model for how he oberved d D rele o he e
 ge reuling rewrd: r nd reuling nex e :... r + + + r +2 +2 +2 r +3 +3.")
16 The Agen-Environmen Inerfce Agen nd environmen inerc dicree ime ep: 0 2 Agen oberve e ep : S produce cion ep : A( ) ge reuling rewrd: r nd reuling nex e :... r r r
17 Mrkov Deciion Procee - MDP Model of he gen-environmen yem covering he Mrkov propery. A MDP i uple {S A P r γ} S: finie e of e A: finie e of cion P: e rniion probbiliy funcion P ' r: rewrd funcion r E r γ: dicou fcor [0] P '
18 Se cpure whever informion i vilble o he gen ep bou i environmen. Thee re rucure buil up over ime from equence of enion memorie ec. Mrkovin propery: We could hrow wy he hiory once e i known Se () r r r r r r ' Pr ' Pr 0 0
19 Rewrd pecify wh he gen need o chieve no HOW o chieve i The gol of n MDP i no o mximize immedie rewrd bu o mximize long erm ccumuled rewrd. Averge fuure reurn: Rewrd (r) Thi ume h rewrd ino he fuure i vluble rewrd now (ll hve he me weigh) lim r k k Dicouned fuure reurn (γ: dicoun fcor) R k R r r 2 2 r 3 k 0 k r k
20 Policy (π) I i progrm deciion mechnim I conin mp from e (or iuion) o cion h could be ken A probbiliy diribuion π() P A condiionl probbiliy diribuion of cion over e If in e hen wih probbiliy defined by π ke he cion
21 Dynmic I pecifie how he e chnge given he cion of he gen. Model-bed: dynmic re known or re eimed. Model-free: we do no know he dynmic of he MDP. In prcice he dynmic re unknown nd o he e repreenion hould be uch h i eily predicble from neighboring e.
22 Se vlue funcion: Ued o deermine how good i i for he gen o be in given e Se-cion vlue funcion: how good i i o perform n cion from given e nd hen follow policy Thi re defined wih repec o pecific policy π() Vlue Funcion r E R E V k k k 0 r E R E Q k k k 0
23 Muliple ource of (probbiliic) unceriny: In e one i llowed o elec differen cion The yem my rniion o differen e from Reurn defined in erm of rewrd i rndom vrible where we eek o mximize in expecion r E R E V k k k 0 r E R E Q k k k 0

24 Bellmn Equion Richrd Bellmn 957 (600 pper 35 book 7 monogrph) A fundmenl propery of vlue funcion i h hey ify e of recurive coniency equion. Wrie he vlue of deciion problem in erm of he pyoff from ome iniil choice nd he vlue of he remining deciion problem brking he opimizion problem ino impler ubproblem
25 The vlue funcion i decompoed ino 2 pr Immedie rewrd r + Dicouned vlue of ucceor e γv( + ) Bellmn Expecion Equion (V) V r E R r E r r E R E V k k k 0 2
26 The e-cion vlue funcion cn be imilrly decompoed ino 2 pr Bellmn Expecion Equion (Q) Q r E r r E R E Q k k k 0 2
27 Looking inide he Bellmn Expecion P '
28 Looking inide he Bellmn Expecion P '
29 Relion beween e nd e-cion vlue funcion
30 Relion beween e nd e-cion vlue funcion P ' P '
31 Opiml Policie nd Vlue Opiml Policy: *: Poibly more hn one opiml policy. Alwy here i le one opiml policy Opiml e vlue funcion: V * V If policy π i uch h in ech e i elec n cion h mximize vlue hen π i n opiml policy V mxv mx r P V * ' * ' '
32 Opiml Policie nd Vlue Opiml e-cion vlue funcion Q Q mx * V r E Q * * ' ' ' ' ' * mx * Q P r Q
33 Relion beween Opiml Se & Se- Acion vlue funcion Opiml vlue funcion re recurively reled by he Bellmn opimliy equion: P '
34 From Opiml Vlue funcion o Opiml Policie An opiml policy cn be found from V*() nd he model dynmic by uing greedily he V*() V * mxv mx r P' V * ' ' An opiml policy cn be found by mximizing over he Q*() i.e. if rg mx Q * * A There i lwy deerminiic opiml policy for ny MDP. If we know Q*() we hve he opiml policy
35 Solving he MDP Given known model of he environmen n MDP Trniion dynmic Rewrd probbiliie We pply Dynmic Progrmming lgorihm for compuing opiml policie Thi i ccomplihed by obining opiml vlue funcion () rg mx Q () A()
36 Solving finie-e MDP Aume MDP wih finie e nd cion pce ( S < A <) Repeedly upde he eimed vlue funcion uing Bellmn equion. Algorihm : Vlue Ierion. For ech e iniilize V()=0 2. Repe unil convergence { } For every e upde V mx r P V ' ' Q( ) '
37 Algorihm : Vlue Ierion Two poible wy of performing he upde Synchronouly: fir compue he new vlue for V() for every e nd hen overwrie ll he old vlue wih he new vlue (Bellmn bckup operor). Aynchronouly: loop over he e (in ome order) nd upde he vlue one ime. A he end V will converge o V* nd he opiml policy i found by: A ' S ' r V * ' *( ) rg mx P '
38
39
40
41
42
43
44
45
46
47
48
49 Algorihm 2: Policy Ierion Combine policy evluion nd policy improvemen o obin equence of monooniclly improving policie nd vlue funcion Compue he vlue funcion for he curren policy nd hen upde he policy uing he curren vlue funcion. A he end V nd π will converge o opimum V*π*
50 Algorihm 2: Policy Ierion. Iniilize policy π rndomly 2. Policy Evluion for ech e unil convergence uing =π() 3. Policy Improvemen ' ' ' rg mx ) ( A V r P New ' ' ' mx ) ( A V r P New V ' ' ' rg mx A V P r
51 Algorihm 2: Policy Ierion (Q-verion). Iniilize policy π rndomly 2. Repe unil convergence () New Q (b) For ech e : Q r E Q A new rg mx rg mx ) ( ) ( ' ' ' ' Q P r Q
52
53
54
55
56
57
58
59
60
61 Vlue ierion v. Policy Ierion Sndrd lgorihm for olving MDP There i no ny greemen which lgorihm i beer Policy ierion i ofen very f for mll MDP nd converge wih very few ierion. For MDP wih lrge e pce vlue ierion my be preferred ince olving for V π explicily would involve lrge yem of liner equion h could be difficul.
62 Reinforcemen Lerning Mehod Mone Crlo mehod Temporl Difference (TD) mehod Vlue Funcion Approximion mehod
63 Mone Crlo Mehod Lern vlue funcion nd Dicover opiml policie. Do no ume knowledge of model (P R ) Mone Crlo mehod cn olve RL problem by verging mple reurn. Lern from experience: mple equence of e cion rewrd (r)

64 Wh doe he Dynmic Progrmming perform?
65 Mone Crlo upde rule: or where n() i number of fir vii o e nd R i he cul reurn following V R n V V V R V V 2 2 r r r R R E V
66 Mone Crlo Policy Evluion rg mx r V '
67 Mone Crlo Policy Evluion Q R Q Q T T T r r r 0 0 0
68 Temporl Difference (TD) Lerning TD generic upde rule: V V V r V V
69 Temporl Difference (TD) Lerning Mone-Crlo upde: V V R V TD(0) upde: Acul reurn from o end of epiode ΔV error V V r V V Eime of he reurn ccording o he curren policy
70 Lerning re V ( ) mx r V( ) V ( ')
71 Advnge of TD Lerning TD mehod do no require model of he environmen only experience TD mehod cn be fully incremenl You cn lern before knowing he finl oucome Le memory Le pek compuion You cn lern wihou he finl oucome From incomplee equence
72 Q-Lerning (Wkin Ph.D. Thei Cmbridge Univ. 989) Off-policy greedy mehod: evlue or improve one policy while cing uing noher Lern e-cion vlue funcion Q() Q( ) Q( ) r mx Q( ) Q( Q ( ) r mx Q( ) Q( ) )
73 Q-Lerning (Wkin Ph.D. Thei Cmbridge Univ. 989) Off-policy greedy mehod: evlue or improve one policy while cing uing noher Lern e-cion vlue funcion Q() Q ( ) Q( ) Q( ) r mx Q( ) Q( Q ( ) r mx Q( ) Q( ) )
74
75 Cn lwy chooe he cion wih highe Q-vlue The Q-funcion i iniilly unrelible Need o explore unil i i opiml A rde-off i needed beween explorion nd exploiion Exploiion To mke he be deciion given curren informion Explorion Explorion v. Exploiion To Gher more informion o mke beer deciion
76 ε-greedy: wih probbiliy ε chooe one cion rndom (uniformly) nd chooe he be cion wih probbiliy -ε (ε i grdully reduced) Probbiliic: Ue probbiliy Smoohly: Explorion Sregie A b b Q Q e e P A b T b Q T Q e e P
77 Exenion: SARSA () On-policy TD mehod: evlue or improve he curren policy ued for conrol SARSA ke explorion ino ccoun in upde Q( ) Q( ) r mx Q( ) Q( Q( ) Q( ) r Q( ) Q( ) ) Ue he cion cully choen in upde (e.g. e- greedy)
78
79 SARSA v. Q-lerning
80 Keep record of previouly viied e (cion) Eligibiliy rce: Lookhed wih le memory Upde muliple e once Se ge credi ccording o heir rce Exenion: Eligibiliy Trce e Q Q ) ( ) ( oherwie e e ) ( ) ( mx Q Q r
81 Acor Criic mehod
82 Funcion pproximion: llow complex environmen The Q-funcion ble could be oo big (or infiniely big!) Decribe e by feure vecor Then he vlue funcion cn be ny regreion model e.g. liner regreion model: Vlue Funcion Approximion n 2 w w w w V n n T 2 2 n 2 w w w w Q n n T 2 2 or
83 Vlue Funcion Approximion There re mny funcion pproximor e.g. Liner model Liner combinion of feure Neurl Nework Deciion ree Kernel mchine Guin Proce..
84 Aume liner model: Wih n bi funcion nd liner weigh w i TD im o chieve n pproximion of Q π meured by he men qured-error (MSE) Vlue funcion pproximion wih Temporl Difference Lerning n i i i T w w w Q N N w Q r w Q N Q w Q N w E 2 2 ) ( ) ( 2 ) ( ) ( 2
85 MSE: Ue ochic grdien decen for on-line lerning: TD Lerning wih funcion pproximion old T old T old old old old w r w w w w Q w Q r w Q w w w E w w ) ( ) ( ) ( N T T r N E w w w N w Q r w Q N E 2 ) ( ) ( 2 w
86 Ide: Conruc regreion problem: Aume N mple obined by curren policy Temporl error: Tol error: Le Squre Temporl Difference Lerning (LSTD) Brdke & Bro 996 Boyn 2002 N N N N N r r r D ) ( ) ( ) ( ) ( Q r Q Q Q e N T T N N r N e N D w E w u
87 Regreion problem: or equivlen: Le Squre Temporl Difference Lerning (LSTD) Brdke & Bro 996 Boyn ' 2 min min w u u R D E u N w min min N T T w N w r N D w E w u T N N T T N N T ' ' ' r N r R
88 Regreion problem: Obining he eimion (2 ge): () Find fir fixed poin pproximion of w (u*) 2 ' 2 min min w u u R D E w N w w u u w ' * 0 R D E T T N
89 Regreion problem: min w E ' u D min u R w 2 N Obining he eimion (2 ge): w 2 (2) Thi i pproximely equl o fixed poin of he rue equion: w T T R T T ' w w ' R u* or equivlen T w A b A ' nd b R T
90 Didvnge of LSTD Approprie number of bi funcion? LSTD require lrge number of mple in order o obin good eime of w. Soring nd invering mrix A nxn no feible if n i lrge. Exenion (Koler Ng 2009) w A b Temporl difference wih regulrized fixed poin min u E ' 2 u D min u R w u N u u u 2 u l l 2 regulrizion regulrizion w A I b
91 LSTDQ pplicion o conrol problem Lgoudki & Pr 2003 Off-line LSTD: w A b T T A ' nd b R On-line cheme: A T N ' i i i i i i i T Ierively vii e nd upde policy
92 LSTDQ pplicion o conrol problem Lgoudki & Pr 2003
93 Chllenge in Reinforcemen Lerning Feure/rewrd deign cn be very involved: Online lerning Coninuou feure Delyed rewrd Prmeer cn hve lrge effec on lerning peed Reliic environmen cn hve pril obervbiliy Non-ionry environmen (more reliic) Working wih coninuou e nd cion pce Muliple gen Reinforcemen Lerning
94 Applicion wih Reinforcemen Lerning Agen
95 (poiion velociy)
96
97 Suon & Bro 998

98 Lerning biliy policy of he Humnoid No Robo Se: 3 join Hip Pich Knee Pich Foo Pich 7 poible cion
99

100

101 Ph Plnning wih Reinforcemen Lerning for mrine plform

102

103 The ochic environmen

104


105 PcMn nd Reinforcemen Lerning (I) M. PcMn coniue chllenging domin for building nd eing RL gen: The environmen i difficuly o be prediced he gho behvior i ochic. The rewrd funcion cn be eily defined Acion pce h mll ize (4 poible cion) Mny RL cheme hve been propoed up o now Rule bed mehodology [I. Szi e.l. MLDG 08] Vlue funcion pproximion by uing Neurl Nework [S. Luc CIG 05 L.Bom e.l. ADPRL 3] Geneic progrmming [A. Alhejli e.l. CIG 0] Mone Crlo ree erch [S. Smohrki e. l. CIG K. Nguyen e.l. CIG 3 ] 0
.")
 or no (0) of he wll in")
106 Se pce repreenion (I) Se pce: 0 dimenionl feure vecor =( ). The fir 4 feure ( ) Reponible for he M.PcMn view Binry: repreen he exience () or no (0) of he wll in he M PcMn four wind direcion S=(00 ) norh we ouh e 0

 gho exi wihin mximum dince of 5 ep THEN he gho direcion i eleced.")
107 Se pce repreenion (II) The fifh feure ( ) Reponible for he direcion of he nere gen rge Tke four (4) vlue h correpond o four wind direcion The rge i eleced follow: IF gho i in dince le hn 8 ep nd i moving gin M. PcMn THEN he cloe fe exi i eleced. uer prmeer ELSE IF n edible (cred) gho exi wihin mximum dince of 5 ep THEN he gho direcion i eleced. ELSE he direcion o he nere do i eleced. S=(000 ) The rge in hi ce i edible gho ( 5 ep ) ) 5 0 (norh direcion) 0

108 Se pce repreenion (III) The nex 4 feure ( ) Reponible for he exi of ny poible gho hre direcion Binry: give u he informion bou he direcion h here i gho hre Thre mening : IF gho wih dince le hn 8 ep from he M. PcMn nd i moving gin i S=( ) norh we ouh e 0

109 Se pce repreenion (IV) The 0 h feure ( ) Reponible for rpped iuion Binry: pecifie if he pcmn gen i rpped () or no (0) Trp mening : IF doe no exi ny poible ecpe direcion. S= ( ) Ce of rp becue gho hve urrounded he Pcmn nd here doen exi ny poible ecpe direcion 0


 () Trining Mze")

110 Experimenl Reul (I) All experimen were conduced by uing MASON imulor Took plce on convenionl PC We ued 3 mze of he originl M. PcMn gme (2) () Trining Mze Teing Mze Mze Mze 2 Mze 3 () (2) hp://c.gmu.edu/~eclb/projec/mon/ Inel Core 2 Qud (2.66 GHz) CPU wih 2 GB RAM
 Even ep Wll Gho Pill Loe")

111 Experimenl Reul (II) Performnce Meric Averge percenge of uccefully level compleion Averge number of win Averge number of ep per epiode Averge core ined per epiode Rewrd funcion (R) Even ep Wll Gho Pill Loe Prmeer eing: Rewrd Decripion Μ Pcmn performed move in he empy pce Μ Pcmn hi he wll Μ Pcmn e cred gho Μ Pcmn e pill Μ Pcmn w een by non-cred gho Dicoun fcor (γ) equl o 0.99 Lerning re (η) equl o 0.0
112 Experimenl Reul (V) Siic (men vlue & d) of evluion meric fer running 00 epiode Mze Level compleion Win # Sep Score Mze (rining) 80% (±24) 40% (±53) (±977) Mze 2 (eing) 70% (±24) 33% 39.4 (±43) (±045) Mze 3 (eing) 80% (±20) 25% (±55) (±0) Siic by plying 50 gme Gme r wih 3 live nd dding life every 0000 poin Mze Averge Score Mx Score Mze (rining) Mze 2 (eing) Mze 3 (eing) Th i inereed o noe h he gen hd hown remrkble behvior biliy o boh unknown mze providing clerly ignificn generlizion biliie

113 Reinforcemen Lerning in Bord Gme Bckgmmon


114 Che Se: 34 feure
115 Deep Reinforcemen Lerning (Deep Mind Tech. Google - 205)

116
117

118
Chapter 2: Evaluative Feedback
 Chper 2: Evluive Feedbck Evluing cions vs. insrucing by giving correc cions Pure evluive feedbck depends olly on he cion ken. Pure insrucive feedbck depends no ll on he cion ken. Supervised lerning is
Chper 2: Evluive Feedbck Evluing cions vs. insrucing by giving correc cions Pure evluive feedbck depends olly on he cion ken. Pure insrucive feedbck depends no ll on he cion ken. Supervised lerning is
Optimality of Myopic Policy for a Class of Monotone Affine Restless Multi-Armed Bandit
 Univeriy of Souhern Cliforni Opimliy of Myopic Policy for Cl of Monoone Affine Rele Muli-Armed Bndi Pri Mnourifrd USC Tr Jvidi UCSD Bhkr Krihnmchri USC Dec 0, 202 Univeriy of Souhern Cliforni Inroducion
Univeriy of Souhern Cliforni Opimliy of Myopic Policy for Cl of Monoone Affine Rele Muli-Armed Bndi Pri Mnourifrd USC Tr Jvidi UCSD Bhkr Krihnmchri USC Dec 0, 202 Univeriy of Souhern Cliforni Inroducion
Minimum Squared Error
 Minimum Squred Error LDF: Minimum Squred-Error Procedures Ide: conver o esier nd eer undersood prolem Percepron y i > 0 for ll smples y i solve sysem of liner inequliies MSE procedure y i i for ll smples
Minimum Squred Error LDF: Minimum Squred-Error Procedures Ide: conver o esier nd eer undersood prolem Percepron y i > 0 for ll smples y i solve sysem of liner inequliies MSE procedure y i i for ll smples
graph of unit step function t
 .5 Piecewie coninuou forcing funcion...e.g. urning he forcing on nd off. The following Lplce rnform meril i ueful in yem where we urn forcing funcion on nd off, nd when we hve righ hnd ide "forcing funcion"
.5 Piecewie coninuou forcing funcion...e.g. urning he forcing on nd off. The following Lplce rnform meril i ueful in yem where we urn forcing funcion on nd off, nd when we hve righ hnd ide "forcing funcion"
Minimum Squared Error
 Minimum Squred Error LDF: Minimum Squred-Error Procedures Ide: conver o esier nd eer undersood prolem Percepron y i > for ll smples y i solve sysem of liner inequliies MSE procedure y i = i for ll smples
Minimum Squred Error LDF: Minimum Squred-Error Procedures Ide: conver o esier nd eer undersood prolem Percepron y i > for ll smples y i solve sysem of liner inequliies MSE procedure y i = i for ll smples
Making Complex Decisions Markov Decision Processes. Making Complex Decisions: Markov Decision Problem
 Mking Comple Decisions Mrkov Decision Processes Vsn Honvr Bioinformics nd Compuionl Biology Progrm Cener for Compuionl Inelligence, Lerning, & Discovery honvr@cs.ise.edu www.cs.ise.edu/~honvr/ www.cild.ise.edu/
Mking Comple Decisions Mrkov Decision Processes Vsn Honvr Bioinformics nd Compuionl Biology Progrm Cener for Compuionl Inelligence, Lerning, & Discovery honvr@cs.ise.edu www.cs.ise.edu/~honvr/ www.cild.ise.edu/
e t dt e t dt = lim e t dt T (1 e T ) = 1
 = 1") Improper Inegrls There re wo ypes of improper inegrls - hose wih infinie limis of inegrion, nd hose wih inegrnds h pproch some poin wihin he limis of inegrion. Firs we will consider inegrls wih infinie
Improper Inegrls There re wo ypes of improper inegrls - hose wih infinie limis of inegrion, nd hose wih inegrnds h pproch some poin wihin he limis of inegrion. Firs we will consider inegrls wih infinie
Bipartite Matching. Matching. Bipartite Matching. Maxflow Formulation
 Mching Inpu: undireced grph G = (V, E). Biprie Mching Inpu: undireced, biprie grph G = (, E).. Mching Ern Myr, Hrld äcke Biprie Mching Inpu: undireced, biprie grph G = (, E). Mflow Formulion Inpu: undireced,
Mching Inpu: undireced grph G = (V, E). Biprie Mching Inpu: undireced, biprie grph G = (, E).. Mching Ern Myr, Hrld äcke Biprie Mching Inpu: undireced, biprie grph G = (, E). Mflow Formulion Inpu: undireced,
LAPLACE TRANSFORMS. 1. Basic transforms
 LAPLACE TRANSFORMS. Bic rnform In hi coure, Lplce Trnform will be inroduced nd heir properie exmined; ble of common rnform will be buil up; nd rnform will be ued o olve ome dierenil equion by rnforming
LAPLACE TRANSFORMS. Bic rnform In hi coure, Lplce Trnform will be inroduced nd heir properie exmined; ble of common rnform will be buil up; nd rnform will be ued o olve ome dierenil equion by rnforming
ARTIFICIAL INTELLIGENCE. Markov decision processes
 INFOB2KI 2017-2018 Urech Univeriy The Neherland ARTIFICIAL INTELLIGENCE Markov deciion procee Lecurer: Silja Renooij Thee lide are par of he INFOB2KI Coure Noe available from www.c.uu.nl/doc/vakken/b2ki/chema.hml
INFOB2KI 2017-2018 Urech Univeriy The Neherland ARTIFICIAL INTELLIGENCE Markov deciion procee Lecurer: Silja Renooij Thee lide are par of he INFOB2KI Coure Noe available from www.c.uu.nl/doc/vakken/b2ki/chema.hml
4.8 Improper Integrals
 4.8 Improper Inegrls Well you ve mde i hrough ll he inegrion echniques. Congrs! Unforunely for us, we sill need o cover one more inegrl. They re clled Improper Inegrls. A his poin, we ve only del wih inegrls
4.8 Improper Inegrls Well you ve mde i hrough ll he inegrion echniques. Congrs! Unforunely for us, we sill need o cover one more inegrl. They re clled Improper Inegrls. A his poin, we ve only del wih inegrls
The solution is often represented as a vector: 2xI + 4X2 + 2X3 + 4X4 + 2X5 = 4 2xI + 4X2 + 3X3 + 3X4 + 3X5 = 4. 3xI + 6X2 + 6X3 + 3X4 + 6X5 = 6.
 [~ o o :- o o ill] i 1. Mrices, Vecors, nd Guss-Jordn Eliminion 1 x y = = - z= The soluion is ofen represened s vecor: n his exmple, he process of eliminion works very smoohly. We cn elimine ll enries
[~ o o :- o o ill] i 1. Mrices, Vecors, nd Guss-Jordn Eliminion 1 x y = = - z= The soluion is ofen represened s vecor: n his exmple, he process of eliminion works very smoohly. We cn elimine ll enries
Stochastic Optimal Control with Linearized Dynamics
 Sochic Opiml Conrol wih Linerized Dynmic Sochich opimle Regelung mi lineriieren Modellen Mer-Thei von Hny Abdulmd Tg der Einreichung: 1. Guchen: Prof. Gerhrd Neumnn 2. Guchen: Prof. Jn Peer 3. Guchen:
Sochic Opiml Conrol wih Linerized Dynmic Sochich opimle Regelung mi lineriieren Modellen Mer-Thei von Hny Abdulmd Tg der Einreichung: 1. Guchen: Prof. Gerhrd Neumnn 2. Guchen: Prof. Jn Peer 3. Guchen:
Reinforcement learning
 CS 75 Mchine Lening Lecue b einfocemen lening Milos Huskech milos@cs.pi.edu 539 Senno Sque einfocemen lening We wn o len conol policy: : X A We see emples of bu oupus e no given Insed of we ge feedbck
CS 75 Mchine Lening Lecue b einfocemen lening Milos Huskech milos@cs.pi.edu 539 Senno Sque einfocemen lening We wn o len conol policy: : X A We see emples of bu oupus e no given Insed of we ge feedbck
Motion. Part 2: Constant Acceleration. Acceleration. October Lab Physics. Ms. Levine 1. Acceleration. Acceleration. Units for Acceleration.
 Moion Accelerion Pr : Consn Accelerion Accelerion Accelerion Accelerion is he re of chnge of velociy. = v - vo = Δv Δ ccelerion = = v - vo chnge of velociy elpsed ime Accelerion is vecor, lhough in one-dimensionl
Moion Accelerion Pr : Consn Accelerion Accelerion Accelerion Accelerion is he re of chnge of velociy. = v - vo = Δv Δ ccelerion = = v - vo chnge of velociy elpsed ime Accelerion is vecor, lhough in one-dimensionl
CSC 373: Algorithm Design and Analysis Lecture 9
 CSC 373: Algorihm Deign n Anlyi Leure 9 Alln Boroin Jnury 28, 2013 1 / 16 Leure 9: Announemen n Ouline Announemen Prolem e 1 ue hi Friy. Term Te 1 will e hel nex Mony, Fe in he uoril. Two nnounemen o follow
CSC 373: Algorihm Deign n Anlyi Leure 9 Alln Boroin Jnury 28, 2013 1 / 16 Leure 9: Announemen n Ouline Announemen Prolem e 1 ue hi Friy. Term Te 1 will e hel nex Mony, Fe in he uoril. Two nnounemen o follow
Positive and negative solutions of a boundary value problem for a
 Invenion Journl of Reerch Technology in Engineering & Mngemen (IJRTEM) ISSN: 2455-3689 www.ijrem.com Volume 2 Iue 9 ǁ Sepemer 28 ǁ PP 73-83 Poiive nd negive oluion of oundry vlue prolem for frcionl, -difference
Invenion Journl of Reerch Technology in Engineering & Mngemen (IJRTEM) ISSN: 2455-3689 www.ijrem.com Volume 2 Iue 9 ǁ Sepemer 28 ǁ PP 73-83 Poiive nd negive oluion of oundry vlue prolem for frcionl, -difference
Feature Extraction for Inverse Reinforcement Learning
 Feure Exrcion for Invere Reinforcemen Lerning Feure-Exrkion für Invere Reinforcemen Lerning Mer-Thei von Oleg Arenz u Wiebden Tg der Einreichung: 1. Guchen: 2. Guchen: 3. Guchen: Feure Exrcion for Invere
Feure Exrcion for Invere Reinforcemen Lerning Feure-Exrkion für Invere Reinforcemen Lerning Mer-Thei von Oleg Arenz u Wiebden Tg der Einreichung: 1. Guchen: 2. Guchen: 3. Guchen: Feure Exrcion for Invere
IX.1.1 The Laplace Transform Definition 700. IX.1.2 Properties 701. IX.1.3 Examples 702. IX.1.4 Solution of IVP for ODEs 704
 Chper IX The Inegrl Trnform Mehod IX. The plce Trnform November 4, 7 699 IX. THE APACE TRANSFORM IX.. The plce Trnform Definiion 7 IX.. Properie 7 IX..3 Emple 7 IX..4 Soluion of IVP for ODE 74 IX..5 Soluion
Chper IX The Inegrl Trnform Mehod IX. The plce Trnform November 4, 7 699 IX. THE APACE TRANSFORM IX.. The plce Trnform Definiion 7 IX.. Properie 7 IX..3 Emple 7 IX..4 Soluion of IVP for ODE 74 IX..5 Soluion
0 for t < 0 1 for t > 0
 8.0 Sep nd del funcions Auhor: Jeremy Orloff The uni Sep Funcion We define he uni sep funcion by u() = 0 for < 0 for > 0 I is clled he uni sep funcion becuse i kes uni sep = 0. I is someimes clled he Heviside
8.0 Sep nd del funcions Auhor: Jeremy Orloff The uni Sep Funcion We define he uni sep funcion by u() = 0 for < 0 for > 0 I is clled he uni sep funcion becuse i kes uni sep = 0. I is someimes clled he Heviside
IX.1.1 The Laplace Transform Definition 700. IX.1.2 Properties 701. IX.1.3 Examples 702. IX.1.4 Solution of IVP for ODEs 704
 Chper IX The Inegrl Trnform Mehod IX. The plce Trnform November 6, 8 699 IX. THE APACE TRANSFORM IX.. The plce Trnform Definiion 7 IX.. Properie 7 IX..3 Emple 7 IX..4 Soluion of IVP for ODE 74 IX..5 Soluion
Chper IX The Inegrl Trnform Mehod IX. The plce Trnform November 6, 8 699 IX. THE APACE TRANSFORM IX.. The plce Trnform Definiion 7 IX.. Properie 7 IX..3 Emple 7 IX..4 Soluion of IVP for ODE 74 IX..5 Soluion
Section P.1 Notes Page 1 Section P.1 Precalculus and Trigonometry Review
 Secion P Noe Pge Secion P Preclculu nd Trigonomer Review ALGEBRA AND PRECALCULUS Eponen Lw: Emple: 8 Emple: Emple: Emple: b b Emple: 9 EXAMPLE: Simplif: nd wrie wi poiive eponen Fir I will flip e frcion
Secion P Noe Pge Secion P Preclculu nd Trigonomer Review ALGEBRA AND PRECALCULUS Eponen Lw: Emple: 8 Emple: Emple: Emple: b b Emple: 9 EXAMPLE: Simplif: nd wrie wi poiive eponen Fir I will flip e frcion
f t f a f x dx By Lin McMullin f x dx= f b f a. 2
 Accumulion: Thoughs On () By Lin McMullin f f f d = + The gols of he AP* Clculus progrm include he semen, Sudens should undersnd he definie inegrl s he ne ccumulion of chnge. 1 The Topicl Ouline includes
Accumulion: Thoughs On () By Lin McMullin f f f d = + The gols of he AP* Clculus progrm include he semen, Sudens should undersnd he definie inegrl s he ne ccumulion of chnge. 1 The Topicl Ouline includes
Graduate Algorithms CS F-18 Flow Networks
 Grue Algorihm CS673-2016F-18 Flow Nework Dvi Glle Deprmen of Compuer Siene Univeriy of Sn Frnio 18-0: Flow Nework Diree Grph G Eh ege weigh i piy Amoun of wer/eon h n flow hrough pipe, for inne Single
Grue Algorihm CS673-2016F-18 Flow Nework Dvi Glle Deprmen of Compuer Siene Univeriy of Sn Frnio 18-0: Flow Nework Diree Grph G Eh ege weigh i piy Amoun of wer/eon h n flow hrough pipe, for inne Single
Contraction Mapping Principle Approach to Differential Equations
 epl Journl of Science echnology 0 (009) 49-53 Conrcion pping Principle pproch o Differenil Equions Bishnu P. Dhungn Deprmen of hemics, hendr Rn Cmpus ribhuvn Universiy, Khmu epl bsrc Using n eension of
epl Journl of Science echnology 0 (009) 49-53 Conrcion pping Principle pproch o Differenil Equions Bishnu P. Dhungn Deprmen of hemics, hendr Rn Cmpus ribhuvn Universiy, Khmu epl bsrc Using n eension of
u(t) Figure 1. Open loop control system
 Figure 1. Open loop control system") Open loop conrol v cloed loop feedbac conrol The nex wo figure preen he rucure of open loop and feedbac conrol yem Figure how an open loop conrol yem whoe funcion i o caue he oupu y o follow he reference
Open loop conrol v cloed loop feedbac conrol The nex wo figure preen he rucure of open loop and feedbac conrol yem Figure how an open loop conrol yem whoe funcion i o caue he oupu y o follow he reference
CS4445/9544 Analysis of Algorithms II Solution for Assignment 1
 Conider he following flow nework CS444/944 Analyi of Algorihm II Soluion for Aignmen (0 mark) In he following nework a minimum cu ha capaciy 0 Eiher prove ha hi aemen i rue, or how ha i i fale Uing he
Conider he following flow nework CS444/944 Analyi of Algorihm II Soluion for Aignmen (0 mark) In he following nework a minimum cu ha capaciy 0 Eiher prove ha hi aemen i rue, or how ha i i fale Uing he
Reinforcement Learning and Policy Reuse
 Reinforcement Lerning nd Policy Reue Mnuel M. Veloo PEL Fll 206 Reding: Reinforcement Lerning: An Introduction R. Sutton nd A. Brto Probbilitic policy reue in reinforcement lerning gent Fernndo Fernndez
Reinforcement Lerning nd Policy Reue Mnuel M. Veloo PEL Fll 206 Reding: Reinforcement Lerning: An Introduction R. Sutton nd A. Brto Probbilitic policy reue in reinforcement lerning gent Fernndo Fernndez
Reinforcement Learning
 Reiforceme Corol lerig Corol polices h choose opiml cios Q lerig Covergece Chper 13 Reiforceme 1 Corol Cosider lerig o choose cios, e.g., Robo lerig o dock o bery chrger o choose cios o opimize fcory oupu
Reiforceme Corol lerig Corol polices h choose opiml cios Q lerig Covergece Chper 13 Reiforceme 1 Corol Cosider lerig o choose cios, e.g., Robo lerig o dock o bery chrger o choose cios o opimize fcory oupu
Reinforcement learning
 Reinforcement lerning Regulr MDP Given: Trnition model P Rewrd function R Find: Policy π Reinforcement lerning Trnition model nd rewrd function initilly unknown Still need to find the right policy Lern
Reinforcement lerning Regulr MDP Given: Trnition model P Rewrd function R Find: Policy π Reinforcement lerning Trnition model nd rewrd function initilly unknown Still need to find the right policy Lern
Factorized Decision Forecasting via Combining Value-based and Reward-based Estimation
 Fcorized Decision Forecsing vi Combining Vlue-bsed nd Rewrd-bsed Esimion Brin D. Ziebr Crnegie Mellon Universiy Pisburgh, PA 15213 bziebr@cs.cmu.edu Absrc A powerful recen perspecive for predicing sequenil
Fcorized Decision Forecsing vi Combining Vlue-bsed nd Rewrd-bsed Esimion Brin D. Ziebr Crnegie Mellon Universiy Pisburgh, PA 15213 bziebr@cs.cmu.edu Absrc A powerful recen perspecive for predicing sequenil
A Kalman filtering simulation
 A Klmn filering simulion The performnce of Klmn filering hs been esed on he bsis of wo differen dynmicl models, ssuming eiher moion wih consn elociy or wih consn ccelerion. The former is epeced o beer
A Klmn filering simulion The performnce of Klmn filering hs been esed on he bsis of wo differen dynmicl models, ssuming eiher moion wih consn elociy or wih consn ccelerion. The former is epeced o beer
5.1-The Initial-Value Problems For Ordinary Differential Equations
 5.-The Iniil-Vlue Problems For Ordinry Differenil Equions Consider solving iniil-vlue problems for ordinry differenil equions: (*) y f, y, b, y. If we know he generl soluion y of he ordinry differenil
5.-The Iniil-Vlue Problems For Ordinry Differenil Equions Consider solving iniil-vlue problems for ordinry differenil equions: (*) y f, y, b, y. If we know he generl soluion y of he ordinry differenil
5. Network flow. Network flow. Maximum flow problem. Ford-Fulkerson algorithm. Min-cost flow. Network flow 5-1
 Nework flow -. Nework flow Nework flow Mximum flow prolem Ford-Fulkeron lgorihm Min-co flow Nework flow Nework N i e of direced grph G = (V ; E) ource 2 V which h only ougoing edge ink (or deinion) 2 V
Nework flow -. Nework flow Nework flow Mximum flow prolem Ford-Fulkeron lgorihm Min-co flow Nework flow Nework N i e of direced grph G = (V ; E) ource 2 V which h only ougoing edge ink (or deinion) 2 V
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 31 Signal & Syem Prof. Mark Fowler Noe Se #27 C-T Syem: Laplace Tranform Power Tool for yem analyi Reading Aignmen: Secion 6.1 6.3 of Kamen and Heck 1/18 Coure Flow Diagram The arrow here how concepual
EECE 31 Signal & Syem Prof. Mark Fowler Noe Se #27 C-T Syem: Laplace Tranform Power Tool for yem analyi Reading Aignmen: Secion 6.1 6.3 of Kamen and Heck 1/18 Coure Flow Diagram The arrow here how concepual
Sph3u Practice Unit Test: Kinematics (Solutions) LoRusso
 LoRusso") Sph3u Prcice Uni Te: Kinemic (Soluion) LoRuo Nme: Tuey, Ocober 3, 07 Ku: /45 pp: /0 T&I: / Com: Thi i copy of uni e from 008. Thi will be imilr o he uni e you will be wriing nex Mony. you cn ee here re
Sph3u Prcice Uni Te: Kinemic (Soluion) LoRuo Nme: Tuey, Ocober 3, 07 Ku: /45 pp: /0 T&I: / Com: Thi i copy of uni e from 008. Thi will be imilr o he uni e you will be wriing nex Mony. you cn ee here re
Properties of Logarithms. Solving Exponential and Logarithmic Equations. Properties of Logarithms. Properties of Logarithms. ( x)
") Properies of Logrihms Solving Eponenil nd Logrihmic Equions Properies of Logrihms Produc Rule ( ) log mn = log m + log n ( ) log = log + log Properies of Logrihms Quoien Rule log m = logm logn n log7 =
Properies of Logrihms Solving Eponenil nd Logrihmic Equions Properies of Logrihms Produc Rule ( ) log mn = log m + log n ( ) log = log + log Properies of Logrihms Quoien Rule log m = logm logn n log7 =
Randomized Perfect Bipartite Matching
 Inenive Algorihm Lecure 24 Randomized Perfec Biparie Maching Lecurer: Daniel A. Spielman April 9, 208 24. Inroducion We explain a randomized algorihm by Ahih Goel, Michael Kapralov and Sanjeev Khanna for
Inenive Algorihm Lecure 24 Randomized Perfec Biparie Maching Lecurer: Daniel A. Spielman April 9, 208 24. Inroducion We explain a randomized algorihm by Ahih Goel, Michael Kapralov and Sanjeev Khanna for
An integral having either an infinite limit of integration or an unbounded integrand is called improper. Here are two examples.
 Improper Inegrls To his poin we hve only considered inegrls f(x) wih he is of inegrion nd b finie nd he inegrnd f(x) bounded (nd in fc coninuous excep possibly for finiely mny jump disconinuiies) An inegrl
Improper Inegrls To his poin we hve only considered inegrls f(x) wih he is of inegrion nd b finie nd he inegrnd f(x) bounded (nd in fc coninuous excep possibly for finiely mny jump disconinuiies) An inegrl
Solutions to assignment 3
 D Sruure n Algorihm FR 6. Informik Sner, Telikeplli WS 03/04 hp://www.mpi-.mpg.e/~ner/oure/lg03/inex.hml Soluion o ignmen 3 Exerie Arirge i he ue of irepnie in urreny exhnge re o rnform one uni of urreny
D Sruure n Algorihm FR 6. Informik Sner, Telikeplli WS 03/04 hp://www.mpi-.mpg.e/~ner/oure/lg03/inex.hml Soluion o ignmen 3 Exerie Arirge i he ue of irepnie in urreny exhnge re o rnform one uni of urreny
Problem Set If all directed edges in a network have distinct capacities, then there is a unique maximum flow.
 CSE 202: Deign and Analyi of Algorihm Winer 2013 Problem Se 3 Inrucor: Kamalika Chaudhuri Due on: Tue. Feb 26, 2013 Inrucion For your proof, you may ue any lower bound, algorihm or daa rucure from he ex
CSE 202: Deign and Analyi of Algorihm Winer 2013 Problem Se 3 Inrucor: Kamalika Chaudhuri Due on: Tue. Feb 26, 2013 Inrucion For your proof, you may ue any lower bound, algorihm or daa rucure from he ex
Reinforcement Learning. Markov Decision Processes
 einforcemen Lerning Mrkov Decision rocesses Mnfred Huber 2014 1 equenil Decision Mking N-rmed bi problems re no good wy o model sequenil decision problem Only dels wih sic decision sequences Could be miiged
einforcemen Lerning Mrkov Decision rocesses Mnfred Huber 2014 1 equenil Decision Mking N-rmed bi problems re no good wy o model sequenil decision problem Only dels wih sic decision sequences Could be miiged
GEOMETRIC EFFECTS CONTRIBUTING TO ANTICIPATION OF THE BEVEL EDGE IN SPREADING RESISTANCE PROFILING
 GEOMETRIC EFFECTS CONTRIBUTING TO ANTICIPATION OF THE BEVEL EDGE IN SPREADING RESISTANCE PROFILING D H Dickey nd R M Brennn Solecon Lbororie, Inc Reno, Nevd 89521 When preding reince probing re mde prior
GEOMETRIC EFFECTS CONTRIBUTING TO ANTICIPATION OF THE BEVEL EDGE IN SPREADING RESISTANCE PROFILING D H Dickey nd R M Brennn Solecon Lbororie, Inc Reno, Nevd 89521 When preding reince probing re mde prior
Flow Networks Alon Efrat Slides courtesy of Charles Leiserson with small changes by Carola Wenk. Flow networks. Flow networks CS 445
 CS 445 Flow Nework lon Efr Slide corey of Chrle Leieron wih mll chnge by Crol Wenk Flow nework Definiion. flow nework i direced grph G = (V, E) wih wo diingihed erice: orce nd ink. Ech edge (, ) E h nonnegie
CS 445 Flow Nework lon Efr Slide corey of Chrle Leieron wih mll chnge by Crol Wenk Flow nework Definiion. flow nework i direced grph G = (V, E) wih wo diingihed erice: orce nd ink. Ech edge (, ) E h nonnegie
September 20 Homework Solutions
 College of Engineering nd Compuer Science Mechnicl Engineering Deprmen Mechnicl Engineering A Seminr in Engineering Anlysis Fll 7 Number 66 Insrucor: Lrry Creo Sepember Homework Soluions Find he specrum
College of Engineering nd Compuer Science Mechnicl Engineering Deprmen Mechnicl Engineering A Seminr in Engineering Anlysis Fll 7 Number 66 Insrucor: Lrry Creo Sepember Homework Soluions Find he specrum
Reinforcement learning II
 CS 1675 Introduction to Mchine Lerning Lecture 26 Reinforcement lerning II Milos Huskrecht milos@cs.pitt.edu 5329 Sennott Squre Reinforcement lerning Bsics: Input x Lerner Output Reinforcement r Critic
CS 1675 Introduction to Mchine Lerning Lecture 26 Reinforcement lerning II Milos Huskrecht milos@cs.pitt.edu 5329 Sennott Squre Reinforcement lerning Bsics: Input x Lerner Output Reinforcement r Critic
1.0 Electrical Systems
 . Elecricl Sysems The ypes of dynmicl sysems we will e sudying cn e modeled in erms of lgeric equions, differenil equions, or inegrl equions. We will egin y looking fmilir mhemicl models of idel resisors,
. Elecricl Sysems The ypes of dynmicl sysems we will e sudying cn e modeled in erms of lgeric equions, differenil equions, or inegrl equions. We will egin y looking fmilir mhemicl models of idel resisors,
S Radio transmission and network access Exercise 1-2
 S-7.330 Rdio rnsmission nd nework ccess Exercise 1 - P1 In four-symbol digil sysem wih eqully probble symbols he pulses in he figure re used in rnsmission over AWGN-chnnel. s () s () s () s () 1 3 4 )
S-7.330 Rdio rnsmission nd nework ccess Exercise 1 - P1 In four-symbol digil sysem wih eqully probble symbols he pulses in he figure re used in rnsmission over AWGN-chnnel. s () s () s () s () 1 3 4 )
PHYSICS 1210 Exam 1 University of Wyoming 14 February points
 PHYSICS 1210 Em 1 Uniersiy of Wyoming 14 Februry 2013 150 poins This es is open-noe nd closed-book. Clculors re permied bu compuers re no. No collborion, consulion, or communicion wih oher people (oher
PHYSICS 1210 Em 1 Uniersiy of Wyoming 14 Februry 2013 150 poins This es is open-noe nd closed-book. Clculors re permied bu compuers re no. No collborion, consulion, or communicion wih oher people (oher
MATH 124 AND 125 FINAL EXAM REVIEW PACKET (Revised spring 2008)
") MATH 14 AND 15 FINAL EXAM REVIEW PACKET (Revised spring 8) The following quesions cn be used s review for Mh 14/ 15 These quesions re no cul smples of quesions h will pper on he finl em, bu hey will provide
MATH 14 AND 15 FINAL EXAM REVIEW PACKET (Revised spring 8) The following quesions cn be used s review for Mh 14/ 15 These quesions re no cul smples of quesions h will pper on he finl em, bu hey will provide
RL Lecture 7: Eligibility Traces. R. S. Sutton and A. G. Barto: Reinforcement Learning: An Introduction 1
 RL Lecure 7: Eligibiliy Traces R. S. Suon and A. G. Baro: Reinforcemen Learning: An Inroducion 1 N-sep TD Predicion Idea: Look farher ino he fuure when you do TD backup (1, 2, 3,, n seps) R. S. Suon and
RL Lecure 7: Eligibiliy Traces R. S. Suon and A. G. Baro: Reinforcemen Learning: An Inroducion 1 N-sep TD Predicion Idea: Look farher ino he fuure when you do TD backup (1, 2, 3,, n seps) R. S. Suon and
Recent Enhancements to the MULTIFAN-CL Software
 SCTB15 Working Pper MWG-2 Recen Enhncemen o he MULTIFAN-CL Sofwre John Hmpon 1 nd Dvid Fournier 2 1 Ocenic Fiherie Progrmme Secreri of he Pcific Communiy Noume, New Cledoni 2 Oer Reerch Ld. PO Box 2040
SCTB15 Working Pper MWG-2 Recen Enhncemen o he MULTIFAN-CL Sofwre John Hmpon 1 nd Dvid Fournier 2 1 Ocenic Fiherie Progrmme Secreri of he Pcific Communiy Noume, New Cledoni 2 Oer Reerch Ld. PO Box 2040
To become more mathematically correct, Circuit equations are Algebraic Differential equations. from KVL, KCL from the constitutive relationship
 Laplace Tranform (Lin & DeCarlo: Ch 3) ENSC30 Elecric Circui II The Laplace ranform i an inegral ranformaion. I ranform: f ( ) F( ) ime variable complex variable From Euler > Lagrange > Laplace. Hence,
Laplace Tranform (Lin & DeCarlo: Ch 3) ENSC30 Elecric Circui II The Laplace ranform i an inegral ranformaion. I ranform: f ( ) F( ) ime variable complex variable From Euler > Lagrange > Laplace. Hence,
INTEGRALS. Exercise 1. Let f : [a, b] R be bounded, and let P and Q be partitions of [a, b]. Prove that if P Q then U(P ) U(Q) and L(P ) L(Q).
![INTEGRALS. Exercise 1. Let f : [a, b] R be bounded, and let P and Q be partitions of [a, b]. Prove that if P Q then U(P ) U(Q) and L(P ) L(Q).](/thumbs/78/77677920.jpg "INTEGRALS. Exercise 1. Let f : [a, b] R be bounded, and let P and Q be partitions of [a, b]. Prove that if P Q then U(P ) U(Q) and L(P ) L(Q).") INTEGRALS JOHN QUIGG Eercise. Le f : [, b] R be bounded, nd le P nd Q be priions of [, b]. Prove h if P Q hen U(P ) U(Q) nd L(P ) L(Q). Soluion: Le P = {,..., n }. Since Q is obined from P by dding finiely
INTEGRALS JOHN QUIGG Eercise. Le f : [, b] R be bounded, nd le P nd Q be priions of [, b]. Prove h if P Q hen U(P ) U(Q) nd L(P ) L(Q). Soluion: Le P = {,..., n }. Since Q is obined from P by dding finiely
Reinforcement Learning
 Reinforcement Lerning Tom Mitchell, Mchine Lerning, chpter 13 Outline Introduction Comprison with inductive lerning Mrkov Decision Processes: the model Optiml policy: The tsk Q Lerning: Q function Algorithm
Reinforcement Lerning Tom Mitchell, Mchine Lerning, chpter 13 Outline Introduction Comprison with inductive lerning Mrkov Decision Processes: the model Optiml policy: The tsk Q Lerning: Q function Algorithm
Maximum Flow. Flow Graph
 Mximum Flow Chper 26 Flow Grph A ommon enrio i o ue grph o repreen flow nework nd ue i o nwer queion ou meril flow Flow i he re h meril move hrough he nework Eh direed edge i ondui for he meril wih ome
Mximum Flow Chper 26 Flow Grph A ommon enrio i o ue grph o repreen flow nework nd ue i o nwer queion ou meril flow Flow i he re h meril move hrough he nework Eh direed edge i ondui for he meril wih ome
( ) ( ) ( ) ( ) ( ) ( y )
 ( ) ( ) ( ) ( ) ( y )") 8. Lengh of Plne Curve The mos fmous heorem in ll of mhemics is he Pyhgoren Theorem. I s formulion s he disnce formul is used o find he lenghs of line segmens in he coordine plne. In his secion you ll
8. Lengh of Plne Curve The mos fmous heorem in ll of mhemics is he Pyhgoren Theorem. I s formulion s he disnce formul is used o find he lenghs of line segmens in he coordine plne. In his secion you ll
Network Flows: Introduction & Maximum Flow
 CSC 373 - lgorihm Deign, nalyi, and Complexiy Summer 2016 Lalla Mouaadid Nework Flow: Inroducion & Maximum Flow We now urn our aenion o anoher powerful algorihmic echnique: Local Search. In a local earch
CSC 373 - lgorihm Deign, nalyi, and Complexiy Summer 2016 Lalla Mouaadid Nework Flow: Inroducion & Maximum Flow We now urn our aenion o anoher powerful algorihmic echnique: Local Search. In a local earch
Algorithmic Discrete Mathematics 6. Exercise Sheet
 Algorihmic Dicree Mahemaic. Exercie Shee Deparmen of Mahemaic SS 0 PD Dr. Ulf Lorenz 7. and 8. Juni 0 Dipl.-Mah. David Meffer Verion of June, 0 Groupwork Exercie G (Heap-Sor) Ue Heap-Sor wih a min-heap
Algorihmic Dicree Mahemaic. Exercie Shee Deparmen of Mahemaic SS 0 PD Dr. Ulf Lorenz 7. and 8. Juni 0 Dipl.-Mah. David Meffer Verion of June, 0 Groupwork Exercie G (Heap-Sor) Ue Heap-Sor wih a min-heap
Bellman Optimality Equation for V*
 Bellmn Optimlity Eqution for V* The vlue of stte under n optiml policy must equl the expected return for the best ction from tht stte: V (s) mx Q (s,) A(s) mx A(s) mx A(s) Er t 1 V (s t 1 ) s t s, t s
Bellmn Optimlity Eqution for V* The vlue of stte under n optiml policy must equl the expected return for the best ction from tht stte: V (s) mx Q (s,) A(s) mx A(s) mx A(s) Er t 1 V (s t 1 ) s t s, t s
A new model for limit order book dynamics
 Anewmodelforlimiorderbookdynmics JeffreyR.Russell UniversiyofChicgo,GrdueSchoolofBusiness TejinKim UniversiyofChicgo,DeprmenofSisics Absrc:Thispperproposesnewmodelforlimiorderbookdynmics.Thelimiorderbookconsiss
Anewmodelforlimiorderbookdynmics JeffreyR.Russell UniversiyofChicgo,GrdueSchoolofBusiness TejinKim UniversiyofChicgo,DeprmenofSisics Absrc:Thispperproposesnewmodelforlimiorderbookdynmics.Thelimiorderbookconsiss
ENGR 1990 Engineering Mathematics The Integral of a Function as a Function
 ENGR 1990 Engineering Mhemics The Inegrl of Funcion s Funcion Previously, we lerned how o esime he inegrl of funcion f( ) over some inervl y dding he res of finie se of rpezoids h represen he re under
ENGR 1990 Engineering Mhemics The Inegrl of Funcion s Funcion Previously, we lerned how o esime he inegrl of funcion f( ) over some inervl y dding he res of finie se of rpezoids h represen he re under
Average & instantaneous velocity and acceleration Motion with constant acceleration
 Physics 7: Lecure Reminders Discussion nd Lb secions sr meeing ne week Fill ou Pink dd/drop form if you need o swich o differen secion h is FULL. Do i TODAY. Homework Ch. : 5, 7,, 3,, nd 6 Ch.: 6,, 3 Submission
Physics 7: Lecure Reminders Discussion nd Lb secions sr meeing ne week Fill ou Pink dd/drop form if you need o swich o differen secion h is FULL. Do i TODAY. Homework Ch. : 5, 7,, 3,, nd 6 Ch.: 6,, 3 Submission
Admin MAX FLOW APPLICATIONS. Flow graph/networks. Flow constraints 4/30/13. CS lunch today Grading. in-flow = out-flow for every vertex (except s, t)
") /0/ dmin lunch oday rading MX LOW PPLIION 0, pring avid Kauchak low graph/nework low nework direced, weighed graph (V, ) poiive edge weigh indicaing he capaciy (generally, aume ineger) conain a ingle ource
/0/ dmin lunch oday rading MX LOW PPLIION 0, pring avid Kauchak low graph/nework low nework direced, weighed graph (V, ) poiive edge weigh indicaing he capaciy (generally, aume ineger) conain a ingle ource
can be viewed as a generalized product, and one for which the product of f and g. That is, does
 Boyce/DiPrim 9 h e, Ch 6.6: The Convoluion Inegrl Elemenry Differenil Equion n Bounry Vlue Problem, 9 h eiion, by Willim E. Boyce n Richr C. DiPrim, 9 by John Wiley & Son, Inc. Someime i i poible o wrie
Boyce/DiPrim 9 h e, Ch 6.6: The Convoluion Inegrl Elemenry Differenil Equion n Bounry Vlue Problem, 9 h eiion, by Willim E. Boyce n Richr C. DiPrim, 9 by John Wiley & Son, Inc. Someime i i poible o wrie
2D Motion WS. A horizontally launched projectile s initial vertical velocity is zero. Solve the following problems with this information.
 Nme D Moion WS The equions of moion h rele o projeciles were discussed in he Projecile Moion Anlsis Acii. ou found h projecile moes wih consn eloci in he horizonl direcion nd consn ccelerion in he ericl
Nme D Moion WS The equions of moion h rele o projeciles were discussed in he Projecile Moion Anlsis Acii. ou found h projecile moes wih consn eloci in he horizonl direcion nd consn ccelerion in he ericl
2. VECTORS. R Vectors are denoted by bold-face characters such as R, V, etc. The magnitude of a vector, such as R, is denoted as R, R, V
 ME 352 VETS 2. VETS Vecor algebra form he mahemaical foundaion for kinemaic and dnamic. Geomer of moion i a he hear of boh he kinemaic and dnamic of mechanical em. Vecor anali i he imehonored ool for decribing
ME 352 VETS 2. VETS Vecor algebra form he mahemaical foundaion for kinemaic and dnamic. Geomer of moion i a he hear of boh he kinemaic and dnamic of mechanical em. Vecor anali i he imehonored ool for decribing
Physics 2A HW #3 Solutions
 Chper 3 Focus on Conceps: 3, 4, 6, 9 Problems: 9, 9, 3, 41, 66, 7, 75, 77 Phsics A HW #3 Soluions Focus On Conceps 3-3 (c) The ccelerion due o grvi is he sme for boh blls, despie he fc h he hve differen
Chper 3 Focus on Conceps: 3, 4, 6, 9 Problems: 9, 9, 3, 41, 66, 7, 75, 77 Phsics A HW #3 Soluions Focus On Conceps 3-3 (c) The ccelerion due o grvi is he sme for boh blls, despie he fc h he hve differen
Sample Final Exam (finals03) Covering Chapters 1-9 of Fundamentals of Signals & Systems
 Covering Chapters 1-9 of Fundamentals of Signals & Systems") Sample Final Exam Covering Chaper 9 (final04) Sample Final Exam (final03) Covering Chaper 9 of Fundamenal of Signal & Syem Problem (0 mar) Conider he caual opamp circui iniially a re depiced below. I LI
Sample Final Exam Covering Chaper 9 (final04) Sample Final Exam (final03) Covering Chaper 9 of Fundamenal of Signal & Syem Problem (0 mar) Conider he caual opamp circui iniially a re depiced below. I LI
Some basic notation and terminology. Deterministic Finite Automata. COMP218: Decision, Computation and Language Note 1
 COMP28: Decision, Compuion nd Lnguge Noe These noes re inended minly s supplemen o he lecures nd exooks; hey will e useful for reminders ou noion nd erminology. Some sic noion nd erminology An lphe is
COMP28: Decision, Compuion nd Lnguge Noe These noes re inended minly s supplemen o he lecures nd exooks; hey will e useful for reminders ou noion nd erminology. Some sic noion nd erminology An lphe is
Chapter 7: Inverse-Response Systems
 Chaper 7: Invere-Repone Syem Normal Syem Invere-Repone Syem Baic Sar ou in he wrong direcion End up in he original eady-ae gain value Two or more yem wih differen magniude and cale in parallel Main yem
Chaper 7: Invere-Repone Syem Normal Syem Invere-Repone Syem Baic Sar ou in he wrong direcion End up in he original eady-ae gain value Two or more yem wih differen magniude and cale in parallel Main yem
Transformations. Ordered set of numbers: (1,2,3,4) Example: (x,y,z) coordinates of pt in space. Vectors
 Example: (x,y,z) coordinates of pt in space. Vectors") Trnformion Ordered e of number:,,,4 Emple:,,z coordine of p in pce. Vecor If, n i i, K, n, i uni ecor Vecor ddiion +w, +, +, + V+w w Sclr roduc,, Inner do roduc α w. w +,.,. The inner produc i SCLR!. w,.,
Trnformion Ordered e of number:,,,4 Emple:,,z coordine of p in pce. Vecor If, n i i, K, n, i uni ecor Vecor ddiion +w, +, +, + V+w w Sclr roduc,, Inner do roduc α w. w +,.,. The inner produc i SCLR!. w,.,
5.2 GRAPHICAL VELOCITY ANALYSIS Polygon Method
 ME 352 GRHICL VELCITY NLYSIS 52 GRHICL VELCITY NLYSIS olygon Mehod Velociy analyi form he hear of kinemaic and dynamic of mechanical yem Velociy analyi i uually performed following a poiion analyi; ie,
ME 352 GRHICL VELCITY NLYSIS 52 GRHICL VELCITY NLYSIS olygon Mehod Velociy analyi form he hear of kinemaic and dynamic of mechanical yem Velociy analyi i uually performed following a poiion analyi; ie,
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Diprimeno di Eleronic Inormzione e Bioingegneri Roboics From moion plnning o rjecories @ 015 robo clssiicions Robos cn be described by Applicion(seelesson1) Geomery (see lesson mechnics) Precision (see
Diprimeno di Eleronic Inormzione e Bioingegneri Roboics From moion plnning o rjecories @ 015 robo clssiicions Robos cn be described by Applicion(seelesson1) Geomery (see lesson mechnics) Precision (see
3. Renewal Limit Theorems
 Virul Lborories > 14. Renewl Processes > 1 2 3 3. Renewl Limi Theorems In he inroducion o renewl processes, we noed h he rrivl ime process nd he couning process re inverses, in sens The rrivl ime process
Virul Lborories > 14. Renewl Processes > 1 2 3 3. Renewl Limi Theorems In he inroducion o renewl processes, we noed h he rrivl ime process nd he couning process re inverses, in sens The rrivl ime process
1 jordan.mcd Eigenvalue-eigenvector approach to solving first order ODEs. -- Jordan normal (canonical) form. Instructor: Nam Sun Wang
 form. Instructor: Nam Sun Wang") jordnmcd Eigenvlue-eigenvecor pproch o solving firs order ODEs -- ordn norml (cnonicl) form Insrucor: Nm Sun Wng Consider he following se of coupled firs order ODEs d d x x 5 x x d d x d d x x x 5 x x
jordnmcd Eigenvlue-eigenvecor pproch o solving firs order ODEs -- ordn norml (cnonicl) form Insrucor: Nm Sun Wng Consider he following se of coupled firs order ODEs d d x x 5 x x d d x d d x x x 5 x x
CSE/NB 528 Lecture 14: Reinforcement Learning (Chapter 9)
") CSE/NB 528 Lecure 14: Reinforcemen Learning Chaper 9 Image from hp://clasdean.la.asu.edu/news/images/ubep2001/neuron3.jpg Lecure figures are from Dayan & Abbo s book hp://people.brandeis.edu/~abbo/book/index.hml
CSE/NB 528 Lecure 14: Reinforcemen Learning Chaper 9 Image from hp://clasdean.la.asu.edu/news/images/ubep2001/neuron3.jpg Lecure figures are from Dayan & Abbo s book hp://people.brandeis.edu/~abbo/book/index.hml
t s (half of the total time in the air) d?
 d?") .. In Cl or Homework Eercie. An Olmpic long jumper i cpble of jumping 8.0 m. Auming hi horizonl peed i 9.0 m/ he lee he ground, how long w he in he ir nd how high did he go? horizonl? 8.0m 9.0 m / 8.0
.. In Cl or Homework Eercie. An Olmpic long jumper i cpble of jumping 8.0 m. Auming hi horizonl peed i 9.0 m/ he lee he ground, how long w he in he ir nd how high did he go? horizonl? 8.0m 9.0 m / 8.0
INVESTIGATION OF REINFORCEMENT LEARNING FOR BUILDING THERMAL MASS CONTROL
 INVESTIGATION OF REINFORCEMENT LEARNING FOR BUILDING THERMAL MASS CONTROL Simeng Liu nd Gregor P. Henze, Ph.D., P.E. Universiy of Nebrsk Lincoln, Archiecurl Engineering 1110 Souh 67 h Sree, Peer Kiewi
INVESTIGATION OF REINFORCEMENT LEARNING FOR BUILDING THERMAL MASS CONTROL Simeng Liu nd Gregor P. Henze, Ph.D., P.E. Universiy of Nebrsk Lincoln, Archiecurl Engineering 1110 Souh 67 h Sree, Peer Kiewi
CSE/NB 528 Lecture 14: From Supervised to Reinforcement Learning (Chapter 9) R. Rao, 528: Lecture 14
 R. Rao, 528: Lecture 14") CSE/NB 58 Lecure 14: From Supervised o Reinforcemen Learning Chaper 9 1 Recall from las ime: Sigmoid Neworks Oupu v T g w u g wiui w Inpu nodes u = u 1 u u 3 T i Sigmoid oupu funcion: 1 g a 1 a e 1 ga
CSE/NB 58 Lecure 14: From Supervised o Reinforcemen Learning Chaper 9 1 Recall from las ime: Sigmoid Neworks Oupu v T g w u g wiui w Inpu nodes u = u 1 u u 3 T i Sigmoid oupu funcion: 1 g a 1 a e 1 ga
Math Week 12 continue ; also cover parts of , EP 7.6 Mon Nov 14
 Mh 225-4 Week 2 coninue.-.3; lo cover pr of.4-.5, EP 7.6 Mon Nov 4.-.3 Lplce rnform, nd pplicion o DE IVP, epecilly hoe in Chper 5. Tody we'll coninue (from l Wednedy) o fill in he Lplce rnform ble (on
Mh 225-4 Week 2 coninue.-.3; lo cover pr of.4-.5, EP 7.6 Mon Nov 4.-.3 Lplce rnform, nd pplicion o DE IVP, epecilly hoe in Chper 5. Tody we'll coninue (from l Wednedy) o fill in he Lplce rnform ble (on
Introduction to Congestion Games
 Algorihmic Game Theory, Summer 2017 Inroducion o Congeion Game Lecure 1 (5 page) Inrucor: Thoma Keelheim In hi lecure, we ge o know congeion game, which will be our running example for many concep in game
Algorihmic Game Theory, Summer 2017 Inroducion o Congeion Game Lecure 1 (5 page) Inrucor: Thoma Keelheim In hi lecure, we ge o know congeion game, which will be our running example for many concep in game
Laplace Transform. Inverse Laplace Transform. e st f(t)dt. (2)
dt. (2)") Laplace Tranform Maoud Malek The Laplace ranform i an inegral ranform named in honor of mahemaician and aronomer Pierre-Simon Laplace, who ued he ranform in hi work on probabiliy heory. I i a powerful
Laplace Tranform Maoud Malek The Laplace ranform i an inegral ranform named in honor of mahemaician and aronomer Pierre-Simon Laplace, who ued he ranform in hi work on probabiliy heory. I i a powerful
Notes on cointegration of real interest rates and real exchange rates. ρ (2)
") Noe on coinegraion of real inere rae and real exchange rae Charle ngel, Univeriy of Wiconin Le me ar wih he obervaion ha while he lieraure (mo prominenly Meee and Rogoff (988) and dion and Paul (993))
Noe on coinegraion of real inere rae and real exchange rae Charle ngel, Univeriy of Wiconin Le me ar wih he obervaion ha while he lieraure (mo prominenly Meee and Rogoff (988) and dion and Paul (993))
Discussion Session 2 Constant Acceleration/Relative Motion Week 03
 PHYS 100 Dicuion Seion Conan Acceleraion/Relaive Moion Week 03 The Plan Today you will work wih your group explore he idea of reference frame (i.e. relaive moion) and moion wih conan acceleraion. You ll
PHYS 100 Dicuion Seion Conan Acceleraion/Relaive Moion Week 03 The Plan Today you will work wih your group explore he idea of reference frame (i.e. relaive moion) and moion wih conan acceleraion. You ll
Mathematics 805 Final Examination Answers
 . 5 poins Se he Weiersrss M-es. Mhemics 85 Finl Eminion Answers Answer: Suppose h A R, nd f n : A R. Suppose furher h f n M n for ll A, nd h Mn converges. Then f n converges uniformly on A.. 5 poins Se
. 5 poins Se he Weiersrss M-es. Mhemics 85 Finl Eminion Answers Answer: Suppose h A R, nd f n : A R. Suppose furher h f n M n for ll A, nd h Mn converges. Then f n converges uniformly on A.. 5 poins Se
An Approach to Incorporating Uncertainty in Network Security Analysis
 An Approch o Incorporing Unceriny in Nework Securiy Anlyi Hong Hi Nguyen hnguye11@illinoi.edu Krik Plni plni2@illinoi.edu Deprmen of Elecricl nd Compuer Engineering Univeriy of Illinoi Urbn-Chmpign Urbn,
An Approch o Incorporing Unceriny in Nework Securiy Anlyi Hong Hi Nguyen hnguye11@illinoi.edu Krik Plni plni2@illinoi.edu Deprmen of Elecricl nd Compuer Engineering Univeriy of Illinoi Urbn-Chmpign Urbn,
Convergence of Singular Integral Operators in Weighted Lebesgue Spaces
 EUROPEAN JOURNAL OF PURE AND APPLIED MATHEMATICS Vol. 10, No. 2, 2017, 335-347 ISSN 1307-5543 www.ejpm.com Published by New York Business Globl Convergence of Singulr Inegrl Operors in Weighed Lebesgue
EUROPEAN JOURNAL OF PURE AND APPLIED MATHEMATICS Vol. 10, No. 2, 2017, 335-347 ISSN 1307-5543 www.ejpm.com Published by New York Business Globl Convergence of Singulr Inegrl Operors in Weighed Lebesgue
20.2. The Transform and its Inverse. Introduction. Prerequisites. Learning Outcomes
 The Trnform nd it Invere 2.2 Introduction In thi Section we formlly introduce the Lplce trnform. The trnform i only pplied to cul function which were introduced in Section 2.1. We find the Lplce trnform
The Trnform nd it Invere 2.2 Introduction In thi Section we formlly introduce the Lplce trnform. The trnform i only pplied to cul function which were introduced in Section 2.1. We find the Lplce trnform
An Approach to Incorporating Uncertainty in Network Security Analysis
 Auhor copy. Acceped for publicion. Do no rediribue. An Approch o Incorporing Unceriny in Nework Securiy Anlyi Hong Hi Nguyen hnguye11@illinoi.edu Krik Plni plni2@illinoi.edu Deprmen of Elecricl nd Compuer
Auhor copy. Acceped for publicion. Do no rediribue. An Approch o Incorporing Unceriny in Nework Securiy Anlyi Hong Hi Nguyen hnguye11@illinoi.edu Krik Plni plni2@illinoi.edu Deprmen of Elecricl nd Compuer
A 1.3 m 2.5 m 2.8 m. x = m m = 8400 m. y = 4900 m 3200 m = 1700 m
 PHYS : Soluions o Chper 3 Home Work. SSM REASONING The displcemen is ecor drwn from he iniil posiion o he finl posiion. The mgniude of he displcemen is he shores disnce beween he posiions. Noe h i is onl
PHYS : Soluions o Chper 3 Home Work. SSM REASONING The displcemen is ecor drwn from he iniil posiion o he finl posiion. The mgniude of he displcemen is he shores disnce beween he posiions. Noe h i is onl
Artificial Intelligence Markov Decision Problems
 rtificil Intelligence Mrkov eciion Problem ilon - briefly mentioned in hpter Ruell nd orvig - hpter 7 Mrkov eciion Problem; pge of Mrkov eciion Problem; pge of exmple: probbilitic blockworld ction outcome
rtificil Intelligence Mrkov eciion Problem ilon - briefly mentioned in hpter Ruell nd orvig - hpter 7 Mrkov eciion Problem; pge of Mrkov eciion Problem; pge of exmple: probbilitic blockworld ction outcome
Suggested Solutions to Midterm Exam Econ 511b (Part I), Spring 2004
, Spring 2004") Suggeed Soluion o Miderm Exam Econ 511b (Par I), Spring 2004 1. Conider a compeiive equilibrium neoclaical growh model populaed by idenical conumer whoe preference over conumpion ream are given by P β
Suggeed Soluion o Miderm Exam Econ 511b (Par I), Spring 2004 1. Conider a compeiive equilibrium neoclaical growh model populaed by idenical conumer whoe preference over conumpion ream are given by P β
18 Extensions of Maximum Flow
 Who are you?" aid Lunkwill, riing angrily from hi ea. Wha do you wan?" I am Majikhie!" announced he older one. And I demand ha I am Vroomfondel!" houed he younger one. Majikhie urned on Vroomfondel. I
Who are you?" aid Lunkwill, riing angrily from hi ea. Wha do you wan?" I am Majikhie!" announced he older one. And I demand ha I am Vroomfondel!" houed he younger one. Majikhie urned on Vroomfondel. I
Version 001 test-1 swinney (57010) 1. is constant at m/s.
 1. is constant at m/s.") Version 001 es-1 swinne (57010) 1 This prin-ou should hve 20 quesions. Muliple-choice quesions m coninue on he nex column or pge find ll choices before nswering. CubeUniVec1x76 001 10.0 poins Acubeis1.4fee
Version 001 es-1 swinne (57010) 1 This prin-ou should hve 20 quesions. Muliple-choice quesions m coninue on he nex column or pge find ll choices before nswering. CubeUniVec1x76 001 10.0 poins Acubeis1.4fee
Design of Controller for Robot Position Control
 eign of Conroller for Robo oiion Conrol Two imporan goal of conrol: 1. Reference inpu racking: The oupu mu follow he reference inpu rajecory a quickly a poible. Se-poin racking: Tracking when he reference
eign of Conroller for Robo oiion Conrol Two imporan goal of conrol: 1. Reference inpu racking: The oupu mu follow he reference inpu rajecory a quickly a poible. Se-poin racking: Tracking when he reference
CS3510 Design & Analysis of Algorithms Fall 2017 Section A. Test 3 Solutions. Instructor: Richard Peng In class, Wednesday, Nov 15, 2017
 Uer ID (NOT he 9 igi numer): gurell4 CS351 Deign & Anlyi of Algorihm Fll 17 Seion A Te 3 Soluion Inruor: Rihr Peng In l, Weney, Nov 15, 17 Do no open hi quiz ookle unil you re iree o o o. Re ll he inruion
Uer ID (NOT he 9 igi numer): gurell4 CS351 Deign & Anlyi of Algorihm Fll 17 Seion A Te 3 Soluion Inruor: Rihr Peng In l, Weney, Nov 15, 17 Do no open hi quiz ookle unil you re iree o o o. Re ll he inruion
4/12/12. Applications of the Maxflow Problem 7.5 Bipartite Matching. Bipartite Matching. Bipartite Matching. Bipartite matching: the flow network
 // Applicaion of he Maxflow Problem. Biparie Maching Biparie Maching Biparie maching. Inpu: undireced, biparie graph = (, E). M E i a maching if each node appear in a mo one edge in M. Max maching: find
// Applicaion of he Maxflow Problem. Biparie Maching Biparie Maching Biparie maching. Inpu: undireced, biparie graph = (, E). M E i a maching if each node appear in a mo one edge in M. Max maching: find
22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 9: The High Beta Tokamak
 .65, MHD Theory of Fusion Sysems Prof. Freidberg Lecure 9: The High e Tokmk Summry of he Properies of n Ohmic Tokmk. Advnges:. good euilibrium (smll shif) b. good sbiliy ( ) c. good confinemen ( τ nr )
.65, MHD Theory of Fusion Sysems Prof. Freidberg Lecure 9: The High e Tokmk Summry of he Properies of n Ohmic Tokmk. Advnges:. good euilibrium (smll shif) b. good sbiliy ( ) c. good confinemen ( τ nr )
Neural assembly binding in linguistic representation
 Neurl ssembly binding in linguisic represenion Frnk vn der Velde & Mrc de Kmps Cogniive Psychology Uni, Universiy of Leiden, Wssenrseweg 52, 2333 AK Leiden, The Neherlnds, vdvelde@fsw.leidenuniv.nl Absrc.
Neurl ssembly binding in linguisic represenion Frnk vn der Velde & Mrc de Kmps Cogniive Psychology Uni, Universiy of Leiden, Wssenrseweg 52, 2333 AK Leiden, The Neherlnds, vdvelde@fsw.leidenuniv.nl Absrc.