k The function Ψ(x) is called wavelet function and shows band-pass behavior. The wavelet coefficients d a,b
|
|
|
- Ronald Small
- 6 years ago
- Views:
Transcription
1 Wavele Transform
2 Wavele Transform The wavele ransform corresponds o he decomposiion of a quadraic inegrable funcion sx ε L 2 R in a family of scaled and ranslaed funcions Ψ,l, ψ, l 1/2 = ψ l The funcion Ψx is called wavele funcion and shows band-pass behavior. The wavele coefficiens d a,b are derived as follows: 1 d =, l sx Ψ x - l dx where ε R +, l ε R and * denoes he complex conjugae funcion - The discree wavele ransform DWT represens a 1-D signal s in erms of shifed versions of a lowpass scaling funcion φ and shifed and dilaed versions of a prooype bandpass wavele funcion ψ. *
3 For special choices of φ and ψ, he funcions: for j and ε Z, form an orhonormal basis, and we have he represenaion: 2 2, 2 2, 2 /, j j j j j j = = φ φ ψ ψ = + = j j j j j j u z 0,, 0,, 0 ψ ω φ where, = d s j j *,, ψ ω = d s u j j *,, φ and
4 Reloo a F.T. expressions: F u = f x e j2πxu dx f x = F u e j2πxu Thus fx is represened here as a linear combinaion of he basis funcions: expjωx Wavele ransform on he oher hand, represens fx or f as a linear combinaion of: ψ = 2 / 2 ψ 2 l l where ψ is called he moher wavele. Parameers and l are inegers which generaes he basis funcions as he dilaed and shifed variaions of he moher wavele. du
5 The parameer plays he role of frequency and l plays he role of ime. Hence by varying and l, we have differen frequency and differen ime or space hence he erm muli-channel muliresoluion approach. Compare in discree case: The F.T.: The DWT: f f x 1 N N 1 u = 0 j2πux N = F u e ; x = 0,1,..., N / 2 = X, l[2 ψ 2 l] l where, DWT 1 1 l X CWT, l = x ψ d
6 = d lt a h x a l X DWT, 2 / ] [, 2 / lt a f a l X x l DWT = DWT Discree Wavele Transform: Forward: and Inverse: Tae, T = 1 and ime is coninuous. Synhesis filers: Analysis filers: 2 / a f a f = 2 / a h a h = Funcions h and f are derived by dilaion of a single filer. Thus he basis funcions are dilaed -> a - and shifed -> - la - versions of: 2 / lt a a f l = = ψ ψ * h f = Synhesis filers for perfec reconsrucion:
7 Visualize pseudo-frequency corresponding o a scale. Assume a cener frequency F c of he wavele and use he following relaionship: F a F = c a. where a is he scale. is he sampling period and F c is he cener frequency of a wavele in Hz. F a is he pseudo-frequency corresponding o he scale a, in Hz. The highpass and lowpass filers are no independen of each oher, and hey are relaed by he following expression: g[ L 1 N ] = 1. h n n
8 QMF ban and ypical magniude responses Decimaors Expanders H 0 z 2 2 G 0 z x ^ x H 1 z 2 2 G 1 z Analysis Ban Synhesis Ban 1 H 0 z H 1 z π/2 ω π
9 M-channel M-band QMF ban Decimaors Expanders H 0 z M M G 0 z H 1 z M M G 1 z x ^ x H M-1 z M M G M-1 z Analysis Ban Synhesis Ban
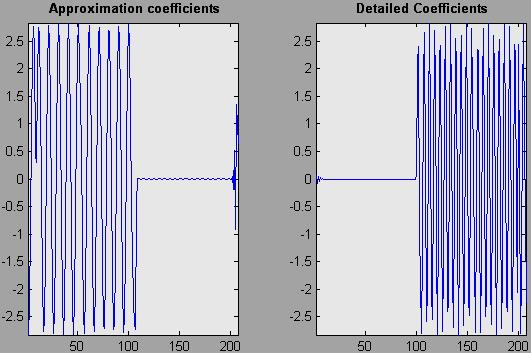
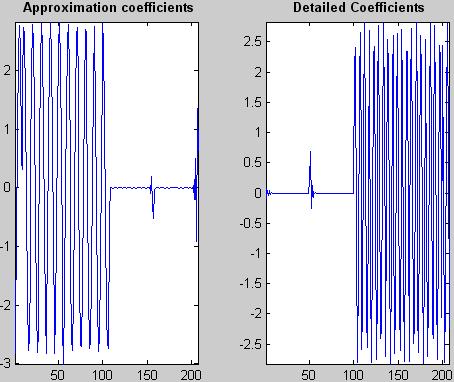
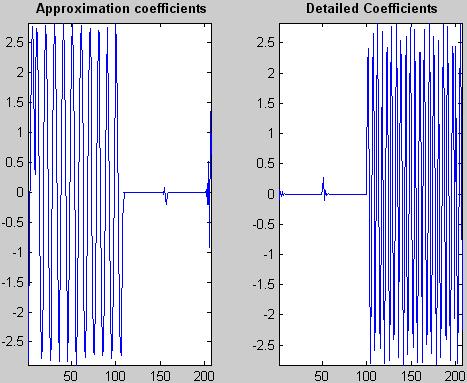
10 The DWT analyzes he signal a differen frequency bands wih differen resoluions by decomposing he signal ino coarse approximaion and deail informaion. DWT employs wo ses of funcions, called scaling funcions and wavele funcions, which are associaed wih low pass and highpass filers, respecively. The decomposiion of he signal ino differen frequency bands is simply obained by successive highpass and lowpass filering of he ime domain signal. The original signal x[n] is firs passed hrough a half-band highpass filer g[n] and a lowpass filer h[n]. Afer he filering, half of he samples can be eliminaed according o he Nyquis s rule since he signal now has a highes frequency of f max /2 radians insead of f max. The signal can herefore be sub-sampled by 2, simply by discarding every oher sample. This consiues one level of decomposiion and can mahemaically be expressed as follows: y hi [ ] = x[ n]. g[2 n] y lo [ ] = x[ n]. h[2 n]

11 Bloc diagram of he mehodology of 1-D DWT.
12 Frequency responses bandwidhs of he differen oupu channels of he wavele filer ban, for a = 2 and hree or more levels of decomposiion α/4 α/2 α β = 2α ω


13 Frequency Response of 2-channel Daubeschies 8-ap orhogonal wavele filers. Low-Pass High-Pass



14 Frequency Response of a 3-channel orhogonal wavele filers. Channel - I Channel - II Channel - III



15 Channel - IV Frequency Response of a 4-channel orhogonal wavele filers. Channel - I Channel - II Channel - III
16 Two-level maximally decimaed filer ban H 0 z 2 2 G 0 z x H 0 z 2 H 1 z 2 2 G 1 z 2 G 0 z ^ x H 0 z 2 2 G 0 z H 1 z 2 2 G 1 z H 1 z 2 2 G 1 z
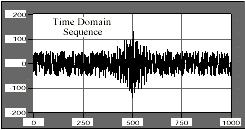
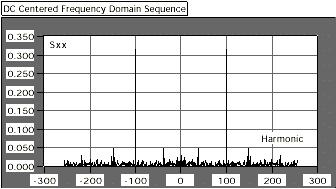
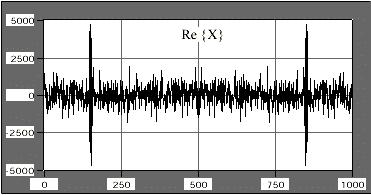
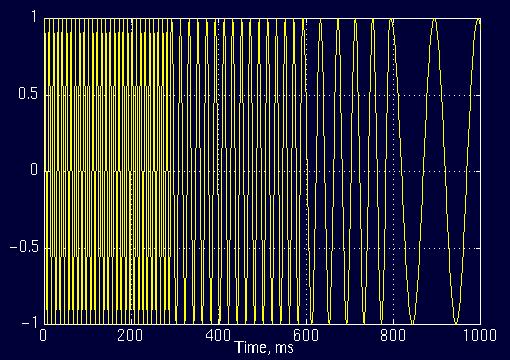
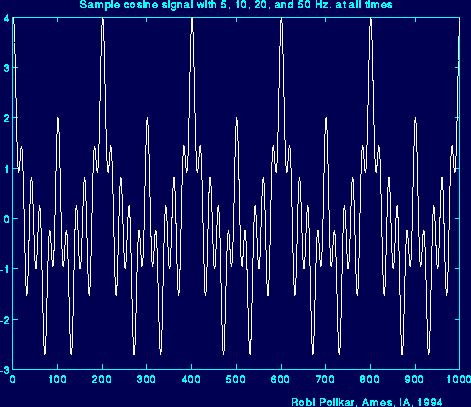
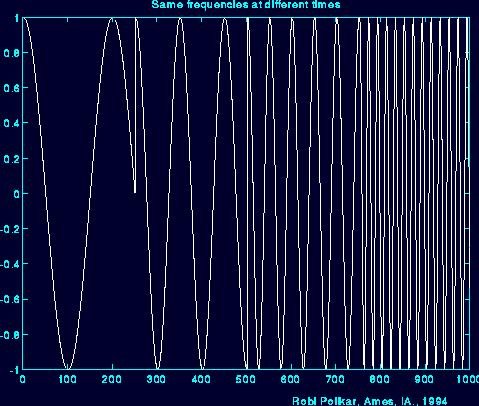
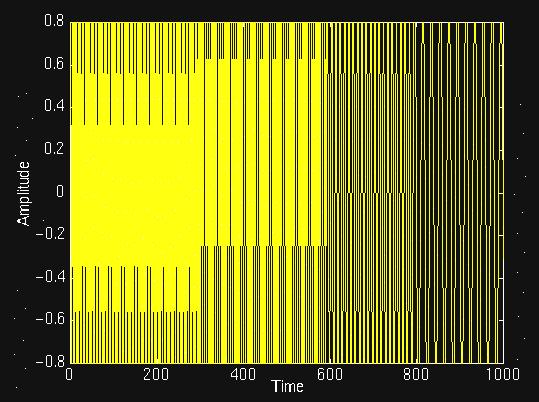
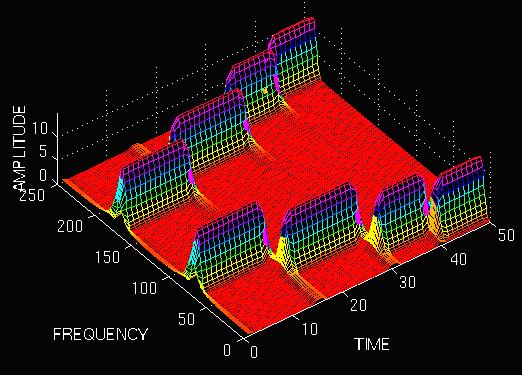
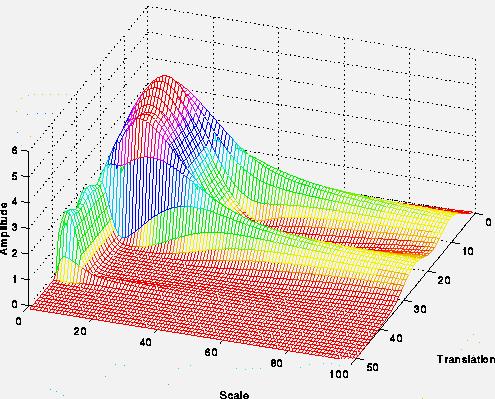
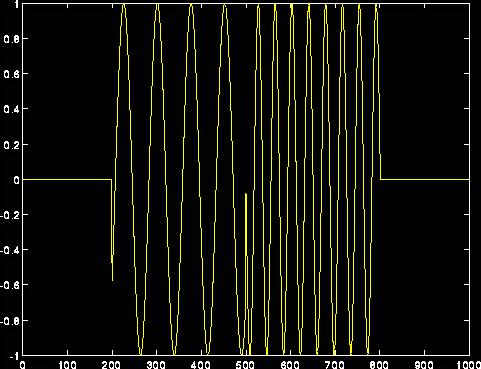
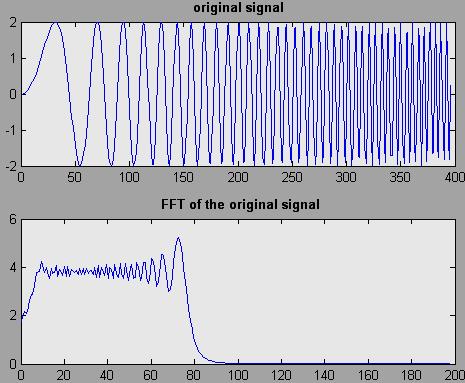
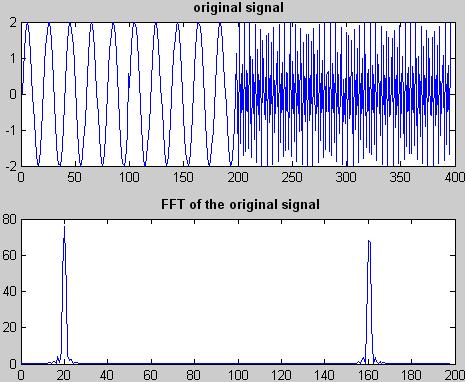
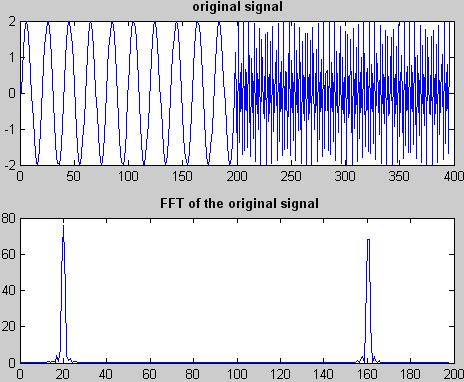
17 Illusraions o demonsrae he difference beween: FT, STFT and WT


18 = cos2π 10 + cos2π 25 + cos2π 50 + cos2π100
19
20
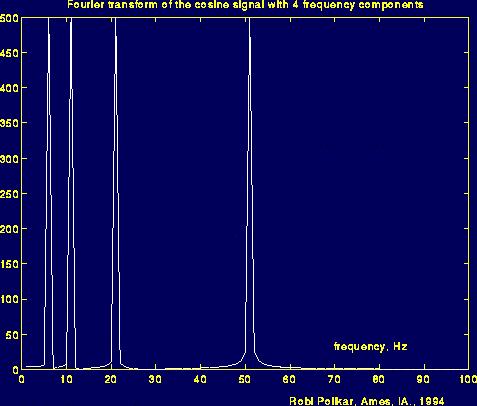
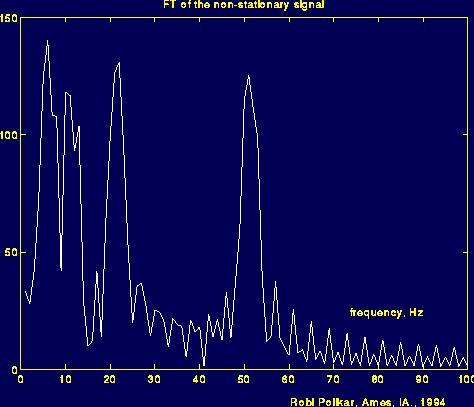
21 Noe ha he FT gives wha frequency componens specral componens exis in he signal. Nohing more, nohing less. When he ime localizaion of he specral componens are needed, a ransform giving he TIME-FREQUENCY REPRESENTATION of he signal is needed. Wha is Wavele Transform and how does i solve he problem? View WT as a plo on a 3-D graph, where ime is one axis, frequency he second and ampliude is he hird axis. This will show us wha frequencies, f, exis a which ime, T. There is an issue, called "uncerainy principle", which saes ha, we canno exacly now wha frequency exiss a wha ime insance, bu we can only now wha frequency bands exis a wha ime inervals.
22 The uncerainy principle, originally found and formulaed by Heisenberg, saes ha, he momenum and he posiion of a moving paricle canno be nown simulaneously. This applies o our subjec as follows: The frequency and ime informaion of a signal a some cerain poin in he ime-frequency plane canno be nown. In oher words: We canno now wha specral componen exiss a any given ime insan. The bes we can do is o invesigae wha specral componens exis a any given inerval of ime. This is a problem of resoluion, and i is he main reason why researchers have swiched from STFT o WT. STFT gives a fixed resoluion a all imes, whereas WT gives a variable or suiable resoluion as follows: Higher frequencies are beer resolved in ime, and lower frequencies are beer resolved in frequency. This means ha, a cerain high frequency componen can be locaed beer in ime wih less relaive error han a low frequency componen. On he conrary, a low frequency componen can be locaed beer in frequency compared o high frequency componen
23

![ω ']exp](/docs-images/74/69833151/images/24-1.jpg "j2πf d w =")
24 STFT x ω, f = [ x. ω ']exp j2πf d w = exp a* 2 2

25

26 Narrow Window, w Broader Window, w

27 Sill larger window, w
28

29

30

31
32
33 Time and Frequency Resoluions Ampliude Frequency Time Ampliude Fourier Frequency Scale Time STFT/Gabor Time Wavele
34 Frequency STFT/Gabor 2ω 1 ω 1 T 2T Time Wavele Scale Frequency ω 0 /4 ω 0 /2 ω 0 T 2T 4T Time
35 Two-dimensional Wavele Transform LPF 2 LL LPF 2 Image HPF 2 LH HPF 2 LPF HPF 2 2 HL HH

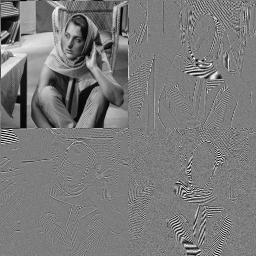
36 Level I wavele decomposiion of an image

37 Level II wavele decomposiion of an image
38 References: Mulirae Sysems and Filer bans, P. P. Vaidyanahan; Prenice Hall Inc., 1993.
39 Wavele based analysis of exure Images
40 Problem of Shape from 3-D Texures



41 2-D Texures 3-D Texures

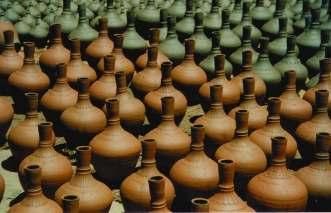
42 Real world 3-D Texure image
43 REFERENCES 1. M. Clerc and S. Malla, The Texure Gradien Equaion for Recovering Shape from Texure, IEEE Transacions on Paern Analysis and Machine Inelligence, Vol. 24, No. 4, pp , April J. Garding, Surface Orienaion and Curvaure from Differenial Texure Disorion, Proceedings of he IEEE Conference on Compuer Vision ICCV 95, 1995, pp J. S. Kwon, H. K. Hong and J. S Choi, Obaining a 3-D orienaion of Projecive exures using a Morphological Mehod, Paern Recogniion, Vol. 29, No. 5, pp , T. Leung and J. Mali, On Perpendicular exures, or: Why do we see more flowers in he disance?, Proceedings of he IEEE Conference on Compuer Vision and Paern Recogniion CVPR 97, 1997, San Juan, Puero Rico, pp J. Mali and R. Rosenholz, Compuing Local Surface Orienaion and Shape from exure for Curved Surfaces, Inernaional Journal of Compuer Vision, Vol. 232, pp , E. Ribeiro and E. R. Hancoc, Shape from periodic Texure using he eigenvecors of local affine disorion, IEEE Transacions on Paern Analysis and Machine Inelligence, Vol. 23, No. 12, pp , Dec B. J. Super and A. C. Bovi, Planar surface orienaion from exure spaial frequencies, Paern Recogniion, Vol. 28, No. 5, pp , Suhendu Das and Thomas Greiner; Wavele based separable analysis of exure images for exracing orienaion of planar surfaces; Proceedings of he second IASTED Inernaional Conference on Visualizaion, Imaging and Image Processing IASTED-VIIP; Sepember 9-12, 2002, Malaga, Spain, pp Thomas Greiner and Suhendu Das; Recovering Orienaion of a exured planar surface using wavele ransform; Indian Conference on Compuer Vision, Graphics and Image Processing, 2002 ICVGIP '02, December 16-18, 2002, Space Applicaions Cenre SAC-ISRO, Ahmedabad, INDIA, pp
44
THE DISCRETE WAVELET TRANSFORM
 . 4 THE DISCRETE WAVELET TRANSFORM 4 1 Chaper 4: THE DISCRETE WAVELET TRANSFORM 4 2 4.1 INTRODUCTION TO DISCRETE WAVELET THEORY The bes way o inroduce waveles is hrough heir comparison o Fourier ransforms,
. 4 THE DISCRETE WAVELET TRANSFORM 4 1 Chaper 4: THE DISCRETE WAVELET TRANSFORM 4 2 4.1 INTRODUCTION TO DISCRETE WAVELET THEORY The bes way o inroduce waveles is hrough heir comparison o Fourier ransforms,
Lecture 4 Kinetics of a particle Part 3: Impulse and Momentum
 MEE Engineering Mechanics II Lecure 4 Lecure 4 Kineics of a paricle Par 3: Impulse and Momenum Linear impulse and momenum Saring from he equaion of moion for a paricle of mass m which is subjeced o an
MEE Engineering Mechanics II Lecure 4 Lecure 4 Kineics of a paricle Par 3: Impulse and Momenum Linear impulse and momenum Saring from he equaion of moion for a paricle of mass m which is subjeced o an
Representing a Signal. Continuous-Time Fourier Methods. Linearity and Superposition. Real and Complex Sinusoids. Jean Baptiste Joseph Fourier
 Represening a Signal Coninuous-ime ourier Mehods he convoluion mehod for finding he response of a sysem o an exciaion aes advanage of he lineariy and imeinvariance of he sysem and represens he exciaion
Represening a Signal Coninuous-ime ourier Mehods he convoluion mehod for finding he response of a sysem o an exciaion aes advanage of he lineariy and imeinvariance of he sysem and represens he exciaion
15. Vector Valued Functions
 1. Vecor Valued Funcions Up o his poin, we have presened vecors wih consan componens, for example, 1, and,,4. However, we can allow he componens of a vecor o be funcions of a common variable. For example,
1. Vecor Valued Funcions Up o his poin, we have presened vecors wih consan componens, for example, 1, and,,4. However, we can allow he componens of a vecor o be funcions of a common variable. For example,
Wavelet Methods for Time Series Analysis. What is a Wavelet? Part I: Introduction to Wavelets and Wavelet Transforms. sines & cosines are big waves
 Wavele Mehods for Time Series Analysis Par I: Inroducion o Waveles and Wavele Transforms waveles are analysis ools for ime series and images as a subjec, waveles are relaively new (983 o presen) a synhesis
Wavele Mehods for Time Series Analysis Par I: Inroducion o Waveles and Wavele Transforms waveles are analysis ools for ime series and images as a subjec, waveles are relaively new (983 o presen) a synhesis
EE 315 Notes. Gürdal Arslan CLASS 1. (Sections ) What is a signal?
 What is a signal?") EE 35 Noes Gürdal Arslan CLASS (Secions.-.2) Wha is a signal? In his class, a signal is some funcion of ime and i represens how some physical quaniy changes over some window of ime. Examples: velociy of
EE 35 Noes Gürdal Arslan CLASS (Secions.-.2) Wha is a signal? In his class, a signal is some funcion of ime and i represens how some physical quaniy changes over some window of ime. Examples: velociy of
Chapter 1 Fundamental Concepts
 Chaper 1 Fundamenal Conceps 1 Signals A signal is a paern of variaion of a physical quaniy, ofen as a funcion of ime (bu also space, disance, posiion, ec). These quaniies are usually he independen variables
Chaper 1 Fundamenal Conceps 1 Signals A signal is a paern of variaion of a physical quaniy, ofen as a funcion of ime (bu also space, disance, posiion, ec). These quaniies are usually he independen variables
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
6.003: Signals and Systems
 6.3: Signals and Sysems Lecure 7 April 8, 6.3: Signals and Sysems C Fourier ransform C Fourier ransform Represening signals by heir frequency conen. X(j)= x()e j d ( analysis equaion) x()= π X(j)e j d
6.3: Signals and Sysems Lecure 7 April 8, 6.3: Signals and Sysems C Fourier ransform C Fourier ransform Represening signals by heir frequency conen. X(j)= x()e j d ( analysis equaion) x()= π X(j)e j d
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Matlab and Python programming: how to get started
 Malab and Pyhon programming: how o ge sared Equipping readers he skills o wrie programs o explore complex sysems and discover ineresing paerns from big daa is one of he main goals of his book. In his chaper,
Malab and Pyhon programming: how o ge sared Equipping readers he skills o wrie programs o explore complex sysems and discover ineresing paerns from big daa is one of he main goals of his book. In his chaper,
Basilio Bona ROBOTICA 03CFIOR 1
 Indusrial Robos Kinemaics 1 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables
Indusrial Robos Kinemaics 1 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables
6.003 Homework #9 Solutions
 6.00 Homework #9 Soluions Problems. Fourier varieies a. Deermine he Fourier series coefficiens of he following signal, which is periodic in 0. x () 0 0 a 0 5 a k sin πk 5 sin πk 5 πk for k 0 a k 0 πk j
6.00 Homework #9 Soluions Problems. Fourier varieies a. Deermine he Fourier series coefficiens of he following signal, which is periodic in 0. x () 0 0 a 0 5 a k sin πk 5 sin πk 5 πk for k 0 a k 0 πk j
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
6.003 Homework #9 Solutions
 6.003 Homework #9 Soluions Problems. Fourier varieies a. Deermine he Fourier series coefficiens of he following signal, which is periodic in 0. x () 0 3 0 a 0 5 a k a k 0 πk j3 e 0 e j πk 0 jπk πk e 0
6.003 Homework #9 Soluions Problems. Fourier varieies a. Deermine he Fourier series coefficiens of he following signal, which is periodic in 0. x () 0 3 0 a 0 5 a k a k 0 πk j3 e 0 e j πk 0 jπk πk e 0
System Processes input signal (excitation) and produces output signal (response)
 and produces output signal (response)") Signal A funcion of ime Sysem Processes inpu signal (exciaion) and produces oupu signal (response) Exciaion Inpu Sysem Oupu Response 1. Types of signals 2. Going from analog o digial world 3. An example
Signal A funcion of ime Sysem Processes inpu signal (exciaion) and produces oupu signal (response) Exciaion Inpu Sysem Oupu Response 1. Types of signals 2. Going from analog o digial world 3. An example
Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubaneswar Kolkata Patna Web: Ph:
 Serial : 0. ND_NW_EE_Signal & Sysems_4068 Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubaneswar Kolkaa Pana Web: E-mail: info@madeeasy.in Ph: 0-4546 CLASS TEST 08-9 ELECTRICAL ENGINEERING
Serial : 0. ND_NW_EE_Signal & Sysems_4068 Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubaneswar Kolkaa Pana Web: E-mail: info@madeeasy.in Ph: 0-4546 CLASS TEST 08-9 ELECTRICAL ENGINEERING
Let us start with a two dimensional case. We consider a vector ( x,
 Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
1. VELOCITY AND ACCELERATION
 1. VELOCITY AND ACCELERATION 1.1 Kinemaics Equaions s = u + 1 a and s = v 1 a s = 1 (u + v) v = u + as 1. Displacemen-Time Graph Gradien = speed 1.3 Velociy-Time Graph Gradien = acceleraion Area under
1. VELOCITY AND ACCELERATION 1.1 Kinemaics Equaions s = u + 1 a and s = v 1 a s = 1 (u + v) v = u + as 1. Displacemen-Time Graph Gradien = speed 1.3 Velociy-Time Graph Gradien = acceleraion Area under
STATE-SPACE MODELLING. A mass balance across the tank gives:
 B. Lennox and N.F. Thornhill, 9, Sae Space Modelling, IChemE Process Managemen and Conrol Subjec Group Newsleer STE-SPACE MODELLING Inroducion: Over he pas decade or so here has been an ever increasing
B. Lennox and N.F. Thornhill, 9, Sae Space Modelling, IChemE Process Managemen and Conrol Subjec Group Newsleer STE-SPACE MODELLING Inroducion: Over he pas decade or so here has been an ever increasing
Spectral Analysis. Joseph Fourier The two representations of a signal are connected via the Fourier transform. Z x(t)exp( j2πft)dt
exp( j2πft)dt") Specral Analysis Asignalx may be represened as a funcion of ime as x() or as a funcion of frequency X(f). This is due o relaionships developed by a French mahemaician, physicis, and Egypologis, Joseph
Specral Analysis Asignalx may be represened as a funcion of ime as x() or as a funcion of frequency X(f). This is due o relaionships developed by a French mahemaician, physicis, and Egypologis, Joseph
CE 395 Special Topics in Machine Learning
 CE 395 Special Topics in Machine Learning Assoc. Prof. Dr. Yuriy Mishchenko Fall 2017 DIGITAL FILTERS AND FILTERING Why filers? Digial filering is he workhorse of digial signal processing Filering is a
CE 395 Special Topics in Machine Learning Assoc. Prof. Dr. Yuriy Mishchenko Fall 2017 DIGITAL FILTERS AND FILTERING Why filers? Digial filering is he workhorse of digial signal processing Filering is a
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2008
 [E5] IMPERIAL COLLEGE LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 008 EEE/ISE PART II MEng BEng and ACGI SIGNALS AND LINEAR SYSTEMS Time allowed: :00 hours There are FOUR quesions
[E5] IMPERIAL COLLEGE LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 008 EEE/ISE PART II MEng BEng and ACGI SIGNALS AND LINEAR SYSTEMS Time allowed: :00 hours There are FOUR quesions
From Particles to Rigid Bodies
 Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
Rigid Body Dynamics From Paricles o Rigid Bodies Paricles No roaions Linear velociy v only Rigid bodies Body roaions Linear velociy v Angular velociy ω Rigid Bodies Rigid bodies have boh a posiion and
e 2t u(t) e 2t u(t) =?
 e 2t u(t) =?") EE : Signals, Sysems, and Transforms Fall 7. Skech he convoluion of he following wo signals. Tes No noes, closed book. f() Show your work. Simplify your answers. g(). Using he convoluion inegral, find
EE : Signals, Sysems, and Transforms Fall 7. Skech he convoluion of he following wo signals. Tes No noes, closed book. f() Show your work. Simplify your answers. g(). Using he convoluion inegral, find
Traveling Waves. Chapter Introduction
 Chaper 4 Traveling Waves 4.1 Inroducion To dae, we have considered oscillaions, i.e., periodic, ofen harmonic, variaions of a physical characerisic of a sysem. The sysem a one ime is indisinguishable from
Chaper 4 Traveling Waves 4.1 Inroducion To dae, we have considered oscillaions, i.e., periodic, ofen harmonic, variaions of a physical characerisic of a sysem. The sysem a one ime is indisinguishable from
ADDITIONAL PROBLEMS (a) Find the Fourier transform of the half-cosine pulse shown in Fig. 2.40(a). Additional Problems 91
 Find the Fourier transform of the half-cosine pulse shown in Fig. 2.40(a). Additional Problems 91") ddiional Problems 9 n inverse relaionship exiss beween he ime-domain and freuency-domain descripions of a signal. Whenever an operaion is performed on he waveform of a signal in he ime domain, a corresponding
ddiional Problems 9 n inverse relaionship exiss beween he ime-domain and freuency-domain descripions of a signal. Whenever an operaion is performed on he waveform of a signal in he ime domain, a corresponding
2.3 SCHRÖDINGER AND HEISENBERG REPRESENTATIONS
 Andrei Tokmakoff, MIT Deparmen of Chemisry, 2/22/2007 2-17 2.3 SCHRÖDINGER AND HEISENBERG REPRESENTATIONS The mahemaical formulaion of he dynamics of a quanum sysem is no unique. So far we have described
Andrei Tokmakoff, MIT Deparmen of Chemisry, 2/22/2007 2-17 2.3 SCHRÖDINGER AND HEISENBERG REPRESENTATIONS The mahemaical formulaion of he dynamics of a quanum sysem is no unique. So far we have described
The equation to any straight line can be expressed in the form:
 Sring Graphs Par 1 Answers 1 TI-Nspire Invesigaion Suden min Aims Deermine a series of equaions of sraigh lines o form a paern similar o ha formed by he cables on he Jerusalem Chords Bridge. Deermine he
Sring Graphs Par 1 Answers 1 TI-Nspire Invesigaion Suden min Aims Deermine a series of equaions of sraigh lines o form a paern similar o ha formed by he cables on he Jerusalem Chords Bridge. Deermine he
( ) ( ) if t = t. It must satisfy the identity. So, bulkiness of the unit impulse (hyper)function is equal to 1. The defining characteristic is
 ( ) if t = t. It must satisfy the identity. So, bulkiness of the unit impulse (hyper)function is equal to 1. The defining characteristic is") UNIT IMPULSE RESPONSE, UNIT STEP RESPONSE, STABILITY. Uni impulse funcion (Dirac dela funcion, dela funcion) rigorously defined is no sricly a funcion, bu disribuion (or measure), precise reamen requires
UNIT IMPULSE RESPONSE, UNIT STEP RESPONSE, STABILITY. Uni impulse funcion (Dirac dela funcion, dela funcion) rigorously defined is no sricly a funcion, bu disribuion (or measure), precise reamen requires
EE123 Digital Signal Processing
 Discree Transforms (Finie) EE3 Digial Signal Processing Lecure 9 DFT is only one ou of a LARGE class of ransforms Used for: Analysis Comression Denoising Deecion Recogniion Aroximaion (Sarse) Sarse reresenaion
Discree Transforms (Finie) EE3 Digial Signal Processing Lecure 9 DFT is only one ou of a LARGE class of ransforms Used for: Analysis Comression Denoising Deecion Recogniion Aroximaion (Sarse) Sarse reresenaion
Lecture Notes 2. The Hilbert Space Approach to Time Series
 Time Series Seven N. Durlauf Universiy of Wisconsin. Basic ideas Lecure Noes. The Hilber Space Approach o Time Series The Hilber space framework provides a very powerful language for discussing he relaionship
Time Series Seven N. Durlauf Universiy of Wisconsin. Basic ideas Lecure Noes. The Hilber Space Approach o Time Series The Hilber space framework provides a very powerful language for discussing he relaionship
6.003: Signals and Systems Lecture 20 November 17, 2011
 6.3: Signals and Sysems Lecure November 7, 6.3: Signals and Sysems Applicaions of Fourier ransforms Filering Noion of a filer. LI sysems canno creae new frequencies. can only scale magniudes and shif phases
6.3: Signals and Sysems Lecure November 7, 6.3: Signals and Sysems Applicaions of Fourier ransforms Filering Noion of a filer. LI sysems canno creae new frequencies. can only scale magniudes and shif phases
Content-Based Shape Retrieval Using Different Shape Descriptors: A Comparative Study Dengsheng Zhang and Guojun Lu
 Conen-Based Shape Rerieval Using Differen Shape Descripors: A Comparaive Sudy Dengsheng Zhang and Guojun Lu Gippsland School of Compuing and Informaion Technology Monash Universiy Churchill, Vicoria 3842
Conen-Based Shape Rerieval Using Differen Shape Descripors: A Comparaive Sudy Dengsheng Zhang and Guojun Lu Gippsland School of Compuing and Informaion Technology Monash Universiy Churchill, Vicoria 3842
Linear Response Theory: The connection between QFT and experiments
 Phys540.nb 39 3 Linear Response Theory: The connecion beween QFT and experimens 3.1. Basic conceps and ideas Q: How do we measure he conduciviy of a meal? A: we firs inroduce a weak elecric field E, and
Phys540.nb 39 3 Linear Response Theory: The connecion beween QFT and experimens 3.1. Basic conceps and ideas Q: How do we measure he conduciviy of a meal? A: we firs inroduce a weak elecric field E, and
Lecture 2-1 Kinematics in One Dimension Displacement, Velocity and Acceleration Everything in the world is moving. Nothing stays still.
 Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Signals and Systems Prof. Brian L. Evans Dept. of Electrical and Computer Engineering The University of Texas at Austin
 EE 345S Real-Time Digial Signal Processing Lab Spring 26 Signals and Sysems Prof. Brian L. Evans Dep. of Elecrical and Compuer Engineering The Universiy of Texas a Ausin Review Signals As Funcions of Time
EE 345S Real-Time Digial Signal Processing Lab Spring 26 Signals and Sysems Prof. Brian L. Evans Dep. of Elecrical and Compuer Engineering The Universiy of Texas a Ausin Review Signals As Funcions of Time
EECS20n, Solution to Midterm 2, 11/17/00
 EECS20n, Soluion o Miderm 2, /7/00. 0 poins Wrie he following in Caresian coordinaes (i.e. in he form x + jy) (a) 2 poins j 3 j 2 + j += j ++j +=2 (b) 2 poins ( j)/( + j) = j (c) 2 poins cos π/4+jsin π/4
EECS20n, Soluion o Miderm 2, /7/00. 0 poins Wrie he following in Caresian coordinaes (i.e. in he form x + jy) (a) 2 poins j 3 j 2 + j += j ++j +=2 (b) 2 poins ( j)/( + j) = j (c) 2 poins cos π/4+jsin π/4
Echocardiography Project and Finite Fourier Series
 Echocardiography Projec and Finie Fourier Series 1 U M An echocardiagram is a plo of how a porion of he hear moves as he funcion of ime over he one or more hearbea cycles If he hearbea repeas iself every
Echocardiography Projec and Finie Fourier Series 1 U M An echocardiagram is a plo of how a porion of he hear moves as he funcion of ime over he one or more hearbea cycles If he hearbea repeas iself every
Block Diagram of a DCS in 411
 Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
Informaion source Forma A/D From oher sources Pulse modu. Muliplex Bandpass modu. X M h: channel impulse response m i g i s i Digial inpu Digial oupu iming and synchronizaion Digial baseband/ bandpass
SUPPLEMENTARY INFORMATION
 SUPPLEMENTARY INFORMATION DOI: 0.038/NCLIMATE893 Temporal resoluion and DICE * Supplemenal Informaion Alex L. Maren and Sephen C. Newbold Naional Cener for Environmenal Economics, US Environmenal Proecion
SUPPLEMENTARY INFORMATION DOI: 0.038/NCLIMATE893 Temporal resoluion and DICE * Supplemenal Informaion Alex L. Maren and Sephen C. Newbold Naional Cener for Environmenal Economics, US Environmenal Proecion
Solution: b All the terms must have the dimension of acceleration. We see that, indeed, each term has the units of acceleration
 PHYS 54 Tes Pracice Soluions Spring 8 Q: [4] Knowing ha in he ne epression a is acceleraion, v is speed, is posiion and is ime, from a dimensional v poin of view, he equaion a is a) incorrec b) correc
PHYS 54 Tes Pracice Soluions Spring 8 Q: [4] Knowing ha in he ne epression a is acceleraion, v is speed, is posiion and is ime, from a dimensional v poin of view, he equaion a is a) incorrec b) correc
For example, the comb filter generated from. ( ) has a transfer function. e ) has L notches at ω = (2k+1)π/L and L peaks at ω = 2π k/l,
 has a transfer function. e ) has L notches at ω = (2k+1)π/L and L peaks at ω = 2π k/l,") Comb Filers The simple filers discussed so far are characeried eiher by a single passband and/or a single sopband There are applicaions where filers wih muliple passbands and sopbands are required The
Comb Filers The simple filers discussed so far are characeried eiher by a single passband and/or a single sopband There are applicaions where filers wih muliple passbands and sopbands are required The
EXPLICIT TIME INTEGRATORS FOR NONLINEAR DYNAMICS DERIVED FROM THE MIDPOINT RULE
 Version April 30, 2004.Submied o CTU Repors. EXPLICIT TIME INTEGRATORS FOR NONLINEAR DYNAMICS DERIVED FROM THE MIDPOINT RULE Per Krysl Universiy of California, San Diego La Jolla, California 92093-0085,
Version April 30, 2004.Submied o CTU Repors. EXPLICIT TIME INTEGRATORS FOR NONLINEAR DYNAMICS DERIVED FROM THE MIDPOINT RULE Per Krysl Universiy of California, San Diego La Jolla, California 92093-0085,
Navneet Saini, Mayank Goyal, Vishal Bansal (2013); Term Project AML310; Indian Institute of Technology Delhi
; Term Project AML310; Indian Institute of Technology Delhi") Creep in Viscoelasic Subsances Numerical mehods o calculae he coefficiens of he Prony equaion using creep es daa and Herediary Inegrals Mehod Navnee Saini, Mayank Goyal, Vishal Bansal (23); Term Projec
Creep in Viscoelasic Subsances Numerical mehods o calculae he coefficiens of he Prony equaion using creep es daa and Herediary Inegrals Mehod Navnee Saini, Mayank Goyal, Vishal Bansal (23); Term Projec
A complex discrete (or digital) signal x(n) is defined in a
 signal x(n) is defined in a") Chaper Complex Signals A number of signal processing applicaions make use of complex signals. Some examples include he characerizaion of he Fourier ransform, blood velociy esimaions, and modulaion of signals
Chaper Complex Signals A number of signal processing applicaions make use of complex signals. Some examples include he characerizaion of he Fourier ransform, blood velociy esimaions, and modulaion of signals
Designing Information Devices and Systems I Spring 2019 Lecture Notes Note 17
 EES 16A Designing Informaion Devices and Sysems I Spring 019 Lecure Noes Noe 17 17.1 apaciive ouchscreen In he las noe, we saw ha a capacior consiss of wo pieces on conducive maerial separaed by a nonconducive
EES 16A Designing Informaion Devices and Sysems I Spring 019 Lecure Noes Noe 17 17.1 apaciive ouchscreen In he las noe, we saw ha a capacior consiss of wo pieces on conducive maerial separaed by a nonconducive
III-A. Fourier Series Expansion
 Summer 28 Signals & Sysems S.F. Hsieh III-A. Fourier Series Expansion Inroducion. Divide and conquer Signals can be decomposed as linear combinaions of: (a) shifed impulses: (sifing propery) Why? x() x()δ(
Summer 28 Signals & Sysems S.F. Hsieh III-A. Fourier Series Expansion Inroducion. Divide and conquer Signals can be decomposed as linear combinaions of: (a) shifed impulses: (sifing propery) Why? x() x()δ(
EXERCISES FOR SECTION 1.5
 1.5 Exisence and Uniqueness of Soluions 43 20. 1 v c 21. 1 v c 1 2 4 6 8 10 1 2 2 4 6 8 10 Graph of approximae soluion obained using Euler s mehod wih = 0.1. Graph of approximae soluion obained using Euler
1.5 Exisence and Uniqueness of Soluions 43 20. 1 v c 21. 1 v c 1 2 4 6 8 10 1 2 2 4 6 8 10 Graph of approximae soluion obained using Euler s mehod wih = 0.1. Graph of approximae soluion obained using Euler
6.003 Homework #13 Solutions
 6.003 Homework #3 Soluions Problems. Transformaion Consider he following ransformaion from x() o y(): x() w () w () w 3 () + y() p() cos() where p() = δ( k). Deermine an expression for y() when x() = sin(/)/().
6.003 Homework #3 Soluions Problems. Transformaion Consider he following ransformaion from x() o y(): x() w () w () w 3 () + y() p() cos() where p() = δ( k). Deermine an expression for y() when x() = sin(/)/().
Class Meeting # 10: Introduction to the Wave Equation
 MATH 8.5 COURSE NOTES - CLASS MEETING # 0 8.5 Inroducion o PDEs, Fall 0 Professor: Jared Speck Class Meeing # 0: Inroducion o he Wave Equaion. Wha is he wave equaion? The sandard wave equaion for a funcion
MATH 8.5 COURSE NOTES - CLASS MEETING # 0 8.5 Inroducion o PDEs, Fall 0 Professor: Jared Speck Class Meeing # 0: Inroducion o he Wave Equaion. Wha is he wave equaion? The sandard wave equaion for a funcion
Lecture 20: Riccati Equations and Least Squares Feedback Control
 34-5 LINEAR SYSTEMS Lecure : Riccai Equaions and Leas Squares Feedback Conrol 5.6.4 Sae Feedback via Riccai Equaions A recursive approach in generaing he marix-valued funcion W ( ) equaion for i for he
34-5 LINEAR SYSTEMS Lecure : Riccai Equaions and Leas Squares Feedback Conrol 5.6.4 Sae Feedback via Riccai Equaions A recursive approach in generaing he marix-valued funcion W ( ) equaion for i for he
Application of Speed Transform to the diagnosis of a roller bearing in variable speed
 Applicaion of Speed Transform o he diagnosis of a roller bearing in variable speed Julien Roussel 1, Michel Hariopoulos 1, Edgard Sekko 1, Cécile Capdessus 1 and Jérôme Anoni 1 PRISME laboraory 1 rue de
Applicaion of Speed Transform o he diagnosis of a roller bearing in variable speed Julien Roussel 1, Michel Hariopoulos 1, Edgard Sekko 1, Cécile Capdessus 1 and Jérôme Anoni 1 PRISME laboraory 1 rue de
A Bayesian Approach to Spectral Analysis
 Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 31 Signals & Sysems Prof. Mark Fowler Noe Se #1 C-T Sysems: Convoluion Represenaion Reading Assignmen: Secion 2.6 of Kamen and Heck 1/11 Course Flow Diagram The arrows here show concepual flow beween
EECE 31 Signals & Sysems Prof. Mark Fowler Noe Se #1 C-T Sysems: Convoluion Represenaion Reading Assignmen: Secion 2.6 of Kamen and Heck 1/11 Course Flow Diagram The arrows here show concepual flow beween
PROBLEMS FOR MATH 162 If a problem is starred, all subproblems are due. If only subproblems are starred, only those are due. SLOPES OF TANGENT LINES
 PROBLEMS FOR MATH 6 If a problem is sarred, all subproblems are due. If onl subproblems are sarred, onl hose are due. 00. Shor answer quesions. SLOPES OF TANGENT LINES (a) A ball is hrown ino he air. Is
PROBLEMS FOR MATH 6 If a problem is sarred, all subproblems are due. If onl subproblems are sarred, onl hose are due. 00. Shor answer quesions. SLOPES OF TANGENT LINES (a) A ball is hrown ino he air. Is
Week 1 Lecture 2 Problems 2, 5. What if something oscillates with no obvious spring? What is ω? (problem set problem)
") Week 1 Lecure Problems, 5 Wha if somehing oscillaes wih no obvious spring? Wha is ω? (problem se problem) Sar wih Try and ge o SHM form E. Full beer can in lake, oscillaing F = m & = ge rearrange: F =
Week 1 Lecure Problems, 5 Wha if somehing oscillaes wih no obvious spring? Wha is ω? (problem se problem) Sar wih Try and ge o SHM form E. Full beer can in lake, oscillaing F = m & = ge rearrange: F =
2. Nonlinear Conservation Law Equations
 . Nonlinear Conservaion Law Equaions One of he clear lessons learned over recen years in sudying nonlinear parial differenial equaions is ha i is generally no wise o ry o aack a general class of nonlinear
. Nonlinear Conservaion Law Equaions One of he clear lessons learned over recen years in sudying nonlinear parial differenial equaions is ha i is generally no wise o ry o aack a general class of nonlinear
Outline Chapter 2: Signals and Systems
 Ouline Chaper 2: Signals and Sysems Signals Basics abou Signal Descripion Fourier Transform Harmonic Decomposiion of Periodic Waveforms (Fourier Analysis) Definiion and Properies of Fourier Transform Imporan
Ouline Chaper 2: Signals and Sysems Signals Basics abou Signal Descripion Fourier Transform Harmonic Decomposiion of Periodic Waveforms (Fourier Analysis) Definiion and Properies of Fourier Transform Imporan
Hamilton- J acobi Equation: Explicit Formulas In this lecture we try to apply the method of characteristics to the Hamilton-Jacobi equation: u t
 M ah 5 2 7 Fall 2 0 0 9 L ecure 1 0 O c. 7, 2 0 0 9 Hamilon- J acobi Equaion: Explici Formulas In his lecure we ry o apply he mehod of characerisics o he Hamilon-Jacobi equaion: u + H D u, x = 0 in R n
M ah 5 2 7 Fall 2 0 0 9 L ecure 1 0 O c. 7, 2 0 0 9 Hamilon- J acobi Equaion: Explici Formulas In his lecure we ry o apply he mehod of characerisics o he Hamilon-Jacobi equaion: u + H D u, x = 0 in R n
EECS 2602 Winter Laboratory 3 Fourier series, Fourier transform and Bode Plots in MATLAB
 EECS 6 Winer 7 Laboraory 3 Fourier series, Fourier ransform and Bode Plos in MATLAB Inroducion: The objecives of his lab are o use MATLAB:. To plo periodic signals wih Fourier series represenaion. To obain
EECS 6 Winer 7 Laboraory 3 Fourier series, Fourier ransform and Bode Plos in MATLAB Inroducion: The objecives of his lab are o use MATLAB:. To plo periodic signals wih Fourier series represenaion. To obain
4.2 The Fourier Transform
 4.2. THE FOURIER TRANSFORM 57 4.2 The Fourier Transform 4.2.1 Inroducion One way o look a Fourier series is ha i is a ransformaion from he ime domain o he frequency domain. Given a signal f (), finding
4.2. THE FOURIER TRANSFORM 57 4.2 The Fourier Transform 4.2.1 Inroducion One way o look a Fourier series is ha i is a ransformaion from he ime domain o he frequency domain. Given a signal f (), finding
A FAMILY OF WAVELETS AND A NEW ORTHOGONAL MULTIRESOLUTION ANALYSIS BASED ON THE NYQUIST CRITERION
 A FAMILY OF WAVELETS AND A NEW ORTHOGONAL MULTIRESOLUTION ANALYSIS BASED ON THE NYQUIST CRITERION HM de Oliveira Member IEEE LR Soares TH Falk Suden M IEEE CODEC - Communicaions Research Group Deparameno
A FAMILY OF WAVELETS AND A NEW ORTHOGONAL MULTIRESOLUTION ANALYSIS BASED ON THE NYQUIST CRITERION HM de Oliveira Member IEEE LR Soares TH Falk Suden M IEEE CODEC - Communicaions Research Group Deparameno
Ground Rules. PC1221 Fundamentals of Physics I. Kinematics. Position. Lectures 3 and 4 Motion in One Dimension. A/Prof Tay Seng Chuan
 Ground Rules PC11 Fundamenals of Physics I Lecures 3 and 4 Moion in One Dimension A/Prof Tay Seng Chuan 1 Swich off your handphone and pager Swich off your lapop compuer and keep i No alking while lecure
Ground Rules PC11 Fundamenals of Physics I Lecures 3 and 4 Moion in One Dimension A/Prof Tay Seng Chuan 1 Swich off your handphone and pager Swich off your lapop compuer and keep i No alking while lecure
Overview. COMP14112: Artificial Intelligence Fundamentals. Lecture 0 Very Brief Overview. Structure of this course
 OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
An Introduction to Malliavin calculus and its applications
 An Inroducion o Malliavin calculus and is applicaions Lecure 5: Smoohness of he densiy and Hörmander s heorem David Nualar Deparmen of Mahemaics Kansas Universiy Universiy of Wyoming Summer School 214
An Inroducion o Malliavin calculus and is applicaions Lecure 5: Smoohness of he densiy and Hörmander s heorem David Nualar Deparmen of Mahemaics Kansas Universiy Universiy of Wyoming Summer School 214
Numerical Dispersion
 eview of Linear Numerical Sabiliy Numerical Dispersion n he previous lecure, we considered he linear numerical sabiliy of boh advecion and diffusion erms when approimaed wih several spaial and emporal
eview of Linear Numerical Sabiliy Numerical Dispersion n he previous lecure, we considered he linear numerical sabiliy of boh advecion and diffusion erms when approimaed wih several spaial and emporal
4.5 Constant Acceleration
 4.5 Consan Acceleraion v() v() = v 0 + a a() a a() = a v 0 Area = a (a) (b) Figure 4.8 Consan acceleraion: (a) velociy, (b) acceleraion When he x -componen of he velociy is a linear funcion (Figure 4.8(a)),
4.5 Consan Acceleraion v() v() = v 0 + a a() a a() = a v 0 Area = a (a) (b) Figure 4.8 Consan acceleraion: (a) velociy, (b) acceleraion When he x -componen of he velociy is a linear funcion (Figure 4.8(a)),
Article from. Predictive Analytics and Futurism. July 2016 Issue 13
 Aricle from Predicive Analyics and Fuurism July 6 Issue An Inroducion o Incremenal Learning By Qiang Wu and Dave Snell Machine learning provides useful ools for predicive analyics The ypical machine learning
Aricle from Predicive Analyics and Fuurism July 6 Issue An Inroducion o Incremenal Learning By Qiang Wu and Dave Snell Machine learning provides useful ools for predicive analyics The ypical machine learning
Sensors, Signals and Noise
 Sensors, Signals and Noise COURSE OUTLINE Inroducion Signals and Noise: 1) Descripion Filering Sensors and associaed elecronics rv 2017/02/08 1 Noise Descripion Noise Waveforms and Samples Saisics of Noise
Sensors, Signals and Noise COURSE OUTLINE Inroducion Signals and Noise: 1) Descripion Filering Sensors and associaed elecronics rv 2017/02/08 1 Noise Descripion Noise Waveforms and Samples Saisics of Noise
Lab 10: RC, RL, and RLC Circuits
 Lab 10: RC, RL, and RLC Circuis In his experimen, we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors. We will sudy he way volages and currens change in
Lab 10: RC, RL, and RLC Circuis In his experimen, we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors. We will sudy he way volages and currens change in
Voltage/current relationship Stored Energy. RL / RC circuits Steady State / Transient response Natural / Step response
 Review Capaciors/Inducors Volage/curren relaionship Sored Energy s Order Circuis RL / RC circuis Seady Sae / Transien response Naural / Sep response EE4 Summer 5: Lecure 5 Insrucor: Ocavian Florescu Lecure
Review Capaciors/Inducors Volage/curren relaionship Sored Energy s Order Circuis RL / RC circuis Seady Sae / Transien response Naural / Sep response EE4 Summer 5: Lecure 5 Insrucor: Ocavian Florescu Lecure
Variational Iteration Method for Solving System of Fractional Order Ordinary Differential Equations
 IOSR Journal of Mahemaics (IOSR-JM) e-issn: 2278-5728, p-issn: 2319-765X. Volume 1, Issue 6 Ver. II (Nov - Dec. 214), PP 48-54 Variaional Ieraion Mehod for Solving Sysem of Fracional Order Ordinary Differenial
IOSR Journal of Mahemaics (IOSR-JM) e-issn: 2278-5728, p-issn: 2319-765X. Volume 1, Issue 6 Ver. II (Nov - Dec. 214), PP 48-54 Variaional Ieraion Mehod for Solving Sysem of Fracional Order Ordinary Differenial
Simulation-Solving Dynamic Models ABE 5646 Week 2, Spring 2010
 Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
9/9/99 (T.F. Weiss) Signals and systems This subject deals with mathematical methods used to describe signals and to analyze and synthesize systems.
 Signals and systems This subject deals with mathematical methods used to describe signals and to analyze and synthesize systems.") 9/9/99 (T.F. Weiss) Lecure #: Inroducion o signals Moivaion: To describe signals, boh man-made and naurally occurring. Ouline: Classificaion ofsignals Building-block signals complex exponenials, impulses
9/9/99 (T.F. Weiss) Lecure #: Inroducion o signals Moivaion: To describe signals, boh man-made and naurally occurring. Ouline: Classificaion ofsignals Building-block signals complex exponenials, impulses
LAPLACE TRANSFORM AND TRANSFER FUNCTION
 CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION Professor Dae Ryook Yang Spring 2018 Dep. of Chemical and Biological Engineering 5-1 Road Map of he Lecure V Laplace Transform and Transfer funcions
CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION Professor Dae Ryook Yang Spring 2018 Dep. of Chemical and Biological Engineering 5-1 Road Map of he Lecure V Laplace Transform and Transfer funcions
Bias in Conditional and Unconditional Fixed Effects Logit Estimation: a Correction * Tom Coupé
 Bias in Condiional and Uncondiional Fixed Effecs Logi Esimaion: a Correcion * Tom Coupé Economics Educaion and Research Consorium, Naional Universiy of Kyiv Mohyla Academy Address: Vul Voloska 10, 04070
Bias in Condiional and Uncondiional Fixed Effecs Logi Esimaion: a Correcion * Tom Coupé Economics Educaion and Research Consorium, Naional Universiy of Kyiv Mohyla Academy Address: Vul Voloska 10, 04070
Chapter 3: Signal Transmission and Filtering. A. Bruce Carlson Paul B. Crilly 2010 The McGraw-Hill Companies
 Communicaion Sysems, 5e Chaper 3: Signal Transmission and Filering A. Bruce Carlson Paul B. Crilly 00 The McGraw-Hill Companies Chaper 3: Signal Transmission and Filering Response of LTI sysems Signal
Communicaion Sysems, 5e Chaper 3: Signal Transmission and Filering A. Bruce Carlson Paul B. Crilly 00 The McGraw-Hill Companies Chaper 3: Signal Transmission and Filering Response of LTI sysems Signal
d 1 = c 1 b 2 - b 1 c 2 d 2 = c 1 b 3 - b 1 c 3
 and d = c b - b c c d = c b - b c c This process is coninued unil he nh row has been compleed. The complee array of coefficiens is riangular. Noe ha in developing he array an enire row may be divided or
and d = c b - b c c d = c b - b c c This process is coninued unil he nh row has been compleed. The complee array of coefficiens is riangular. Noe ha in developing he array an enire row may be divided or
Continuous Time. Time-Domain System Analysis. Impulse Response. Impulse Response. Impulse Response. Impulse Response. ( t) + b 0.
 + b 0.") Time-Domain Sysem Analysis Coninuous Time. J. Robers - All Righs Reserved. Edied by Dr. Rober Akl 1. J. Robers - All Righs Reserved. Edied by Dr. Rober Akl 2 Le a sysem be described by a 2 y ( ) + a 1
Time-Domain Sysem Analysis Coninuous Time. J. Robers - All Righs Reserved. Edied by Dr. Rober Akl 1. J. Robers - All Righs Reserved. Edied by Dr. Rober Akl 2 Le a sysem be described by a 2 y ( ) + a 1
Laplace Transform and its Relation to Fourier Transform
 Chaper 6 Laplace Transform and is Relaion o Fourier Transform (A Brief Summary) Gis of he Maer 2 Domains of Represenaion Represenaion of signals and sysems Time Domain Coninuous Discree Time Time () [n]
Chaper 6 Laplace Transform and is Relaion o Fourier Transform (A Brief Summary) Gis of he Maer 2 Domains of Represenaion Represenaion of signals and sysems Time Domain Coninuous Discree Time Time () [n]
Signal processing. A. Sestieri Dipartimento di Meccanica e Aeronautica University La Sapienza, Rome
 Signal processing A. Sesieri Diparimeno di Meccanica e Aeronauica Universiy La Sapienza, Rome Presenaion layou - Fourier series and Fourier ransforms - Leakage - Aliasing - Analog versus digial signals
Signal processing A. Sesieri Diparimeno di Meccanica e Aeronauica Universiy La Sapienza, Rome Presenaion layou - Fourier series and Fourier ransforms - Leakage - Aliasing - Analog versus digial signals
Lecture 1 Overview. course mechanics. outline & topics. what is a linear dynamical system? why study linear systems? some examples
 EE263 Auumn 27-8 Sephen Boyd Lecure 1 Overview course mechanics ouline & opics wha is a linear dynamical sysem? why sudy linear sysems? some examples 1 1 Course mechanics all class info, lecures, homeworks,
EE263 Auumn 27-8 Sephen Boyd Lecure 1 Overview course mechanics ouline & opics wha is a linear dynamical sysem? why sudy linear sysems? some examples 1 1 Course mechanics all class info, lecures, homeworks,
The Potential Effectiveness of the Detection of Pulsed Signals in the Non-Uniform Sampling
 The Poenial Effeciveness of he Deecion of Pulsed Signals in he Non-Uniform Sampling Arhur Smirnov, Sanislav Vorobiev and Ajih Abraham 3, 4 Deparmen of Compuer Science, Universiy of Illinois a Chicago,
The Poenial Effeciveness of he Deecion of Pulsed Signals in he Non-Uniform Sampling Arhur Smirnov, Sanislav Vorobiev and Ajih Abraham 3, 4 Deparmen of Compuer Science, Universiy of Illinois a Chicago,
4. Electric field lines with respect to equipotential surfaces are
 Pre-es Quasi-saic elecromagneism. The field produced by primary charge Q and by an uncharged conducing plane disanced from Q by disance d is equal o he field produced wihou conducing plane by wo following
Pre-es Quasi-saic elecromagneism. The field produced by primary charge Q and by an uncharged conducing plane disanced from Q by disance d is equal o he field produced wihou conducing plane by wo following
Chapter 6. Systems of First Order Linear Differential Equations
 Chaper 6 Sysems of Firs Order Linear Differenial Equaions We will only discuss firs order sysems However higher order sysems may be made ino firs order sysems by a rick shown below We will have a sligh
Chaper 6 Sysems of Firs Order Linear Differenial Equaions We will only discuss firs order sysems However higher order sysems may be made ino firs order sysems by a rick shown below We will have a sligh
Kinematics and kinematic functions
 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables and vice versa Direc Posiion
Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables and vice versa Direc Posiion
28. Narrowband Noise Representation
 Narrowband Noise Represenaion on Mac 8. Narrowband Noise Represenaion In mos communicaion sysems, we are ofen dealing wih band-pass filering of signals. Wideband noise will be shaped ino bandlimied noise.
Narrowband Noise Represenaion on Mac 8. Narrowband Noise Represenaion In mos communicaion sysems, we are ofen dealing wih band-pass filering of signals. Wideband noise will be shaped ino bandlimied noise.
3, so θ = arccos
 Mahemaics 210 Professor Alan H Sein Monday, Ocober 1, 2007 SOLUTIONS This problem se is worh 50 poins 1 Find he angle beween he vecors (2, 7, 3) and (5, 2, 4) Soluion: Le θ be he angle (2, 7, 3) (5, 2,
Mahemaics 210 Professor Alan H Sein Monday, Ocober 1, 2007 SOLUTIONS This problem se is worh 50 poins 1 Find he angle beween he vecors (2, 7, 3) and (5, 2, 4) Soluion: Le θ be he angle (2, 7, 3) (5, 2,
EE 224 Signals and Systems I Complex numbers sinusodal signals Complex exponentials e jωt phasor addition
 EE 224 Signals and Sysems I Complex numbers sinusodal signals Complex exponenials e jω phasor addiion 1/28 Complex Numbers Recangular Polar y z r z θ x Good for addiion/subracion Good for muliplicaion/division
EE 224 Signals and Sysems I Complex numbers sinusodal signals Complex exponenials e jω phasor addiion 1/28 Complex Numbers Recangular Polar y z r z θ x Good for addiion/subracion Good for muliplicaion/division
Guest Lectures for Dr. MacFarlane s EE3350 Part Deux
 Gues Lecures for Dr. MacFarlane s EE3350 Par Deux Michael Plane Mon., 08-30-2010 Wrie name in corner. Poin ou his is a review, so I will go faser. Remind hem o go lisen o online lecure abou geing an A
Gues Lecures for Dr. MacFarlane s EE3350 Par Deux Michael Plane Mon., 08-30-2010 Wrie name in corner. Poin ou his is a review, so I will go faser. Remind hem o go lisen o online lecure abou geing an A
EE3723 : Digital Communications
 EE373 : Digial Communicaions Week 6-7: Deecion Error Probabiliy Signal Space Orhogonal Signal Space MAJU-Digial Comm.-Week-6-7 Deecion Mached filer reduces he received signal o a single variable zt, afer
EE373 : Digial Communicaions Week 6-7: Deecion Error Probabiliy Signal Space Orhogonal Signal Space MAJU-Digial Comm.-Week-6-7 Deecion Mached filer reduces he received signal o a single variable zt, afer
Solutions - Midterm Exam
 DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING, THE UNIVERITY OF NEW MEXICO ECE-34: ignals and ysems ummer 203 PROBLEM (5 PT) Given he following LTI sysem: oluions - Miderm Exam a) kech he impulse response
DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING, THE UNIVERITY OF NEW MEXICO ECE-34: ignals and ysems ummer 203 PROBLEM (5 PT) Given he following LTI sysem: oluions - Miderm Exam a) kech he impulse response
KINEMATICS IN ONE DIMENSION
 KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
Lecture 2: Optics / C2: Quantum Information and Laser Science
 Lecure : Opics / C: Quanum Informaion and Laser Science Ocober 9, 8 1 Fourier analysis This branch of analysis is exremely useful in dealing wih linear sysems (e.g. Maxwell s equaions for he mos par),
Lecure : Opics / C: Quanum Informaion and Laser Science Ocober 9, 8 1 Fourier analysis This branch of analysis is exremely useful in dealing wih linear sysems (e.g. Maxwell s equaions for he mos par),
Mathematical Theory and Modeling ISSN (Paper) ISSN (Online) Vol 3, No.3, 2013
 ISSN (Online) Vol 3, No.3, 2013") Mahemaical Theory and Modeling ISSN -580 (Paper) ISSN 5-05 (Online) Vol, No., 0 www.iise.org The ffec of Inverse Transformaion on he Uni Mean and Consan Variance Assumpions of a Muliplicaive rror Model
Mahemaical Theory and Modeling ISSN -580 (Paper) ISSN 5-05 (Online) Vol, No., 0 www.iise.org The ffec of Inverse Transformaion on he Uni Mean and Consan Variance Assumpions of a Muliplicaive rror Model
Answers to 1 Homework
 Answers o Homework. x + and y x 5 y To eliminae he parameer, solve for x. Subsiue ino y s equaion o ge y x.. x and y, x y x To eliminae he parameer, solve for. Subsiue ino y s equaion o ge x y, x. (Noe:
Answers o Homework. x + and y x 5 y To eliminae he parameer, solve for x. Subsiue ino y s equaion o ge y x.. x and y, x y x To eliminae he parameer, solve for. Subsiue ino y s equaion o ge x y, x. (Noe:
An introduction to the theory of SDDP algorithm
 An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
Orthogonal Rational Functions, Associated Rational Functions And Functions Of The Second Kind
 Proceedings of he World Congress on Engineering 2008 Vol II Orhogonal Raional Funcions, Associaed Raional Funcions And Funcions Of The Second Kind Karl Deckers and Adhemar Bulheel Absrac Consider he sequence
Proceedings of he World Congress on Engineering 2008 Vol II Orhogonal Raional Funcions, Associaed Raional Funcions And Funcions Of The Second Kind Karl Deckers and Adhemar Bulheel Absrac Consider he sequence