MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2. Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year
|
|
|
- Lewis George
- 5 years ago
- Views:
Transcription
1 MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2 1 Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year
2 OUTLINE OF WEEK 8 topics: quadratic optimisation, least squares, iterative algorithms for nonlinear optimisatiom Least squares methods Linear least squares ( QP ) Quadratic Programming Integer Programming (IP) and LP relaxation Iterative methods Newton Raphson Quasi-Newton Conjugate gradient Gradient descent 2
3 LEAST SQUARES OPTIMISATION 3 Week 8 Optimisation 2

4 LEAST SQUARES 4

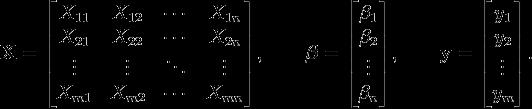
5 LINEAR LEAST SQUARES 5
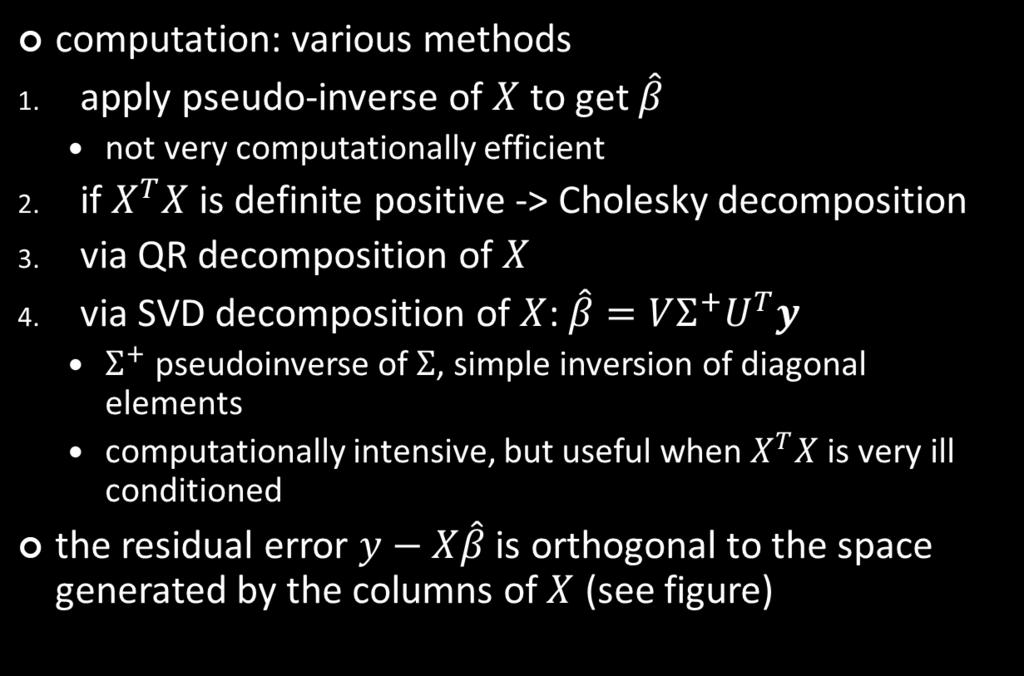
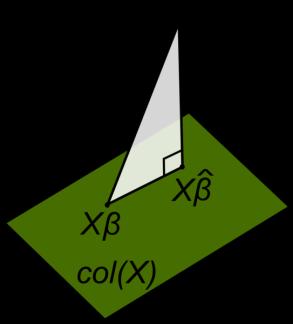
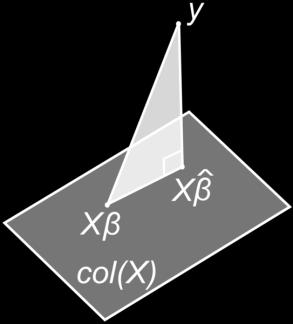
6 COMPUTATION AND INTERPRETATION 6
7 QUADRATIC PROGRAMMING 7 Week 8 Optimisation 2
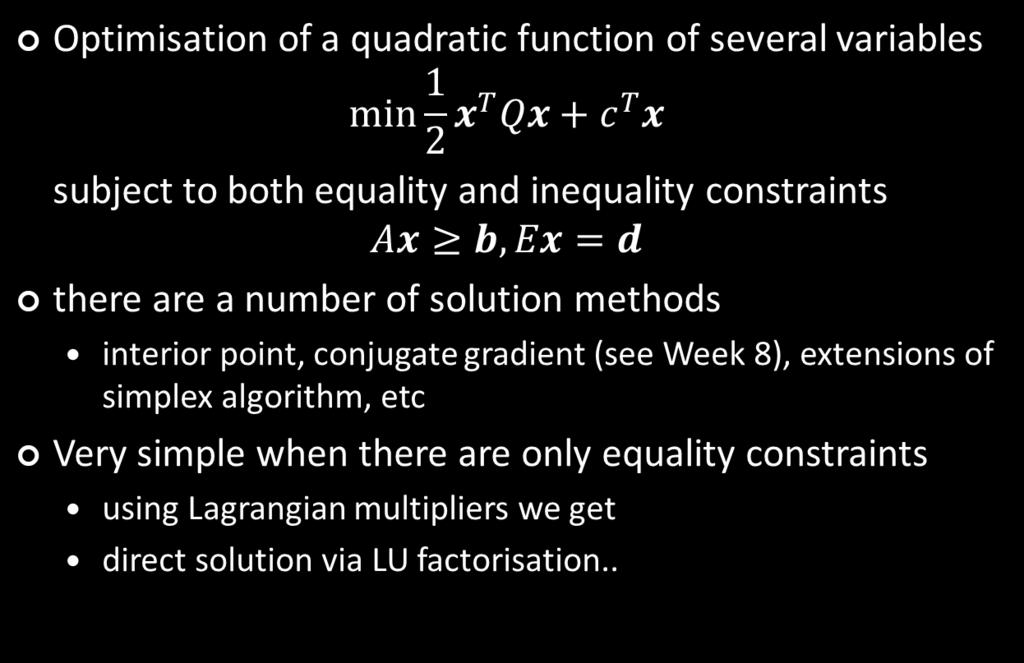
8 FORMULATION 8

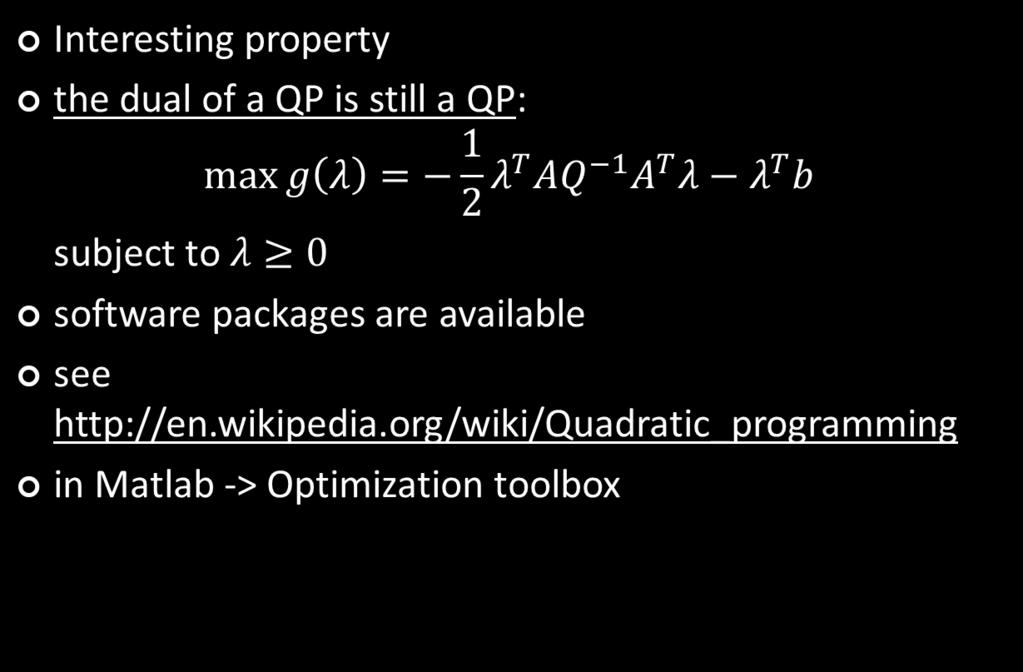
9 DUAL PROBLEM AND COMPUTATION 9
10 INTEGER PROGRAMMING 10 Week 8 Optimisation 2

11 ( IP ) INTEGER PROGRAMMING optimisation problem in which some of the variables are integer numbers It is NP-hard canonical form: where all entries of A, b and c are integer many problems can be formulated as IP: travelling salesman vertex cover Boolean satisfiability 11

12 EXAMPLE example problem feasible integer points in red constraints after LP relaxation in blue clearly, the LP relax optimum is neither feasible nor optimal for the IP problem 12
13 LP RELAXATION the idea is to relax the constraint that x is integer, and solve the resulting LP problem, then round in general, solution after relaxation is not feasible however, if A is totally unimodular, every basic feasible solution (vertex of the polytope determined by the linear constraints) is integer! ( unimodular (ever square nonsingular matrix is matrix is unimodular when det A = 1 we can just apply the simplex algorithm, and we are sure to get the optimal integer solution if A is not unimodular, there are exact algorithms 13
14 ITERATIVE METHODS 14 Week 8 Optimisation 2


15 NONLINEAR PROGRAMMING some of the constraints or the objective function are nonlinear issue arises when the problem is non-convex under differentiability of the functions involved, the Kuhn-Tucker conditions provide necessary conditions for ( 7 optimality (see Week example: nonlinear feasibility space ( sector (blue useful tools: numerical iterative methods 15
16 ITERATIVE METHODS solve nonlinear programming problems by evaluating Hessian, gradients and/or function values for smooth functions derivative calculations improve the rate of convergence, but increase computational load performance criterion: number of function evaluations Order of n+1 for gradients Order of n 2 for Hessians ultimately, what s best depend on the problem 16

17 NEWTON S METHOD 17
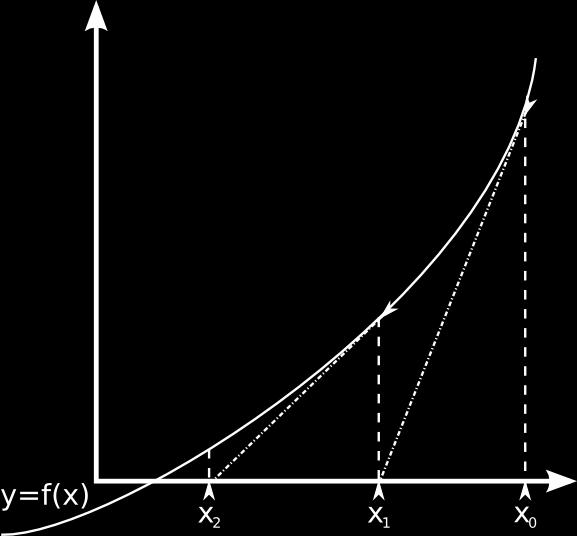
18 GEOMETRIC INTERPRETATION 18
19 QUASI-NEWTON derives from Newton s method looks for the stationary points of a function, using a second order Taylor approximation the Hessian does not need to be computed, uses an approximation B of it, such that a condition called the secant equation (Taylor expansion ( itself of the gradient it is underdetermined: need to add additional constraints, various options e.g. symmetry: B=B T, minimal distance: 19
20 QUASI-NEWTON update steps: Newton steps using the current approximation B k of the Hessian various methods to update B k, e.g. DFP where BFGS: Matlab optimization toolbox implementation: BFGS is one option of fminunc.m 20

 the sequence x 0, x 1, x 2,.")
21 ( DESCENT GRADIENT DESCENT (STEEPEST first-order optimisation algorithm takes steps proportional to the negative of the gradient to find local minimum ( maxima (opposite for local also known as steepest descent starts with a guess x 0... and updates using ( F(b if is small enough, F(a) the sequence x 0, x 1, x 2,... should converge to local minimum 21


22 BEHAVIOR OF GRADIENT DESCENT kind of zig-zags slow convergence near the minimum gradient points away from the actual direction of the sought minimum can be used to solve linear systems Ax = b, in a least squares sense, by minimising Ax b 22
23 GRADIENT DESCENT PYTHON IMPLEMENTATION piece of code which finds the local minimum of the function f(x) = x 4-3x 3 + 2, with derivative f'(x) = 4x 3-9x 2 x_old = 0 x_new = 6 # The algorithm starts at x=6 eps = 0.01 # step size precision = def f_prime(x): return 4 * x**3-9 * x**2 while abs(x_new - x_old) > precision: x_old = x_new ( f_prime(x_old x_new = x_old - eps * print "Local minimum occurs at ", x_new 23
 information to take more direct route")
24 GRADIENT DESCENT VS NEWTON illustrates a comparison Newton in red Gradient descent in green Newton uses curvature (second order) information to take more direct route 24
25 CONJUGATE GRADIENT used to solve linear systems whose matrix A is positive definite iterative method, so can be applied to large systems for which Cholesky decomposition is not feasible can also be used in energy minimisation two vectors are conjugate is their inner product w.r.t. A is zero (they are orthogonal using the norm associated ( A with idea: solution of the system is also unique minimizer of the quadratic function 25
26 CONJUGATE GRADIENT - ALGORITHM start with initial guess x 0 at each step we take the negative of the gradient of the quadratic function, and we move in the direction p 0 = b Ax 0 the residual is r k = b Ax k gradient descent would move in the direction of r k Instead we want the successive search directions p k to be ( procedure conjugate w.r.t. A (similar to Gram-Schmidt update equations: 26
27 EXAMPLE MATLAB CODE can be easily implemented function [x] = conjgrad(a,b,x) r = b-a*x; p = r; rsold = r'*r; for i = 1:10^(6) Ap = A*p; alpha = rsold/(p'*ap); x = x + alpha*p; r = r - alpha*ap; rsnew = r'*r; if sqrt(rsnew) < 1e-10 break; end p = r + rsnew/rsold*p; rsold = rsnew; end 27

28 CONJUGATE GRADIENT VS GRADIENT DESCENT illustrates a comparison Conjugate gradient in red Gradient descent in green Conjugate gradient converges in at most n steps 28
29 SUMMARY 29 Week 8 Optimisation 2
30 SUMMARY OF WEEK 8 Nonlinear optimisation topics ( particular Least squares (linear in ( brief ) Quadratic Programming Integer Programming Nonlinear Programming Iterative methods Newton-Raphson Quasi-Newton gradient descent conjugate gradient 30
Line Search Methods for Unconstrained Optimisation
 Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Scientific Computing: Optimization
 Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Nonlinear Optimization: What s important?
 Nonlinear Optimization: What s important? Julian Hall 10th May 2012 Convexity: convex problems A local minimizer is a global minimizer A solution of f (x) = 0 (stationary point) is a minimizer A global
Nonlinear Optimization: What s important? Julian Hall 10th May 2012 Convexity: convex problems A local minimizer is a global minimizer A solution of f (x) = 0 (stationary point) is a minimizer A global
2.098/6.255/ Optimization Methods Practice True/False Questions
 2.098/6.255/15.093 Optimization Methods Practice True/False Questions December 11, 2009 Part I For each one of the statements below, state whether it is true or false. Include a 1-3 line supporting sentence
2.098/6.255/15.093 Optimization Methods Practice True/False Questions December 11, 2009 Part I For each one of the statements below, state whether it is true or false. Include a 1-3 line supporting sentence
Numerical optimization. Numerical optimization. Longest Shortest where Maximal Minimal. Fastest. Largest. Optimization problems
 1 Numerical optimization Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book Numerical optimization 048921 Advanced topics in vision Processing and Analysis of
1 Numerical optimization Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book Numerical optimization 048921 Advanced topics in vision Processing and Analysis of
The Conjugate Gradient Method
 The Conjugate Gradient Method Jason E. Hicken Aerospace Design Lab Department of Aeronautics & Astronautics Stanford University 14 July 2011 Lecture Objectives describe when CG can be used to solve Ax
The Conjugate Gradient Method Jason E. Hicken Aerospace Design Lab Department of Aeronautics & Astronautics Stanford University 14 July 2011 Lecture Objectives describe when CG can be used to solve Ax
Numerical Optimization Professor Horst Cerjak, Horst Bischof, Thomas Pock Mat Vis-Gra SS09
 Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
The Conjugate Gradient Method
 The Conjugate Gradient Method Lecture 5, Continuous Optimisation Oxford University Computing Laboratory, HT 2006 Notes by Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The notion of complexity (per iteration)
The Conjugate Gradient Method Lecture 5, Continuous Optimisation Oxford University Computing Laboratory, HT 2006 Notes by Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The notion of complexity (per iteration)
1 Numerical optimization
 Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
Methods that avoid calculating the Hessian. Nonlinear Optimization; Steepest Descent, Quasi-Newton. Steepest Descent
 Nonlinear Optimization Steepest Descent and Niclas Börlin Department of Computing Science Umeå University niclas.borlin@cs.umu.se A disadvantage with the Newton method is that the Hessian has to be derived
Nonlinear Optimization Steepest Descent and Niclas Börlin Department of Computing Science Umeå University niclas.borlin@cs.umu.se A disadvantage with the Newton method is that the Hessian has to be derived
Optimization Methods
 Optimization Methods Decision making Examples: determining which ingredients and in what quantities to add to a mixture being made so that it will meet specifications on its composition allocating available
Optimization Methods Decision making Examples: determining which ingredients and in what quantities to add to a mixture being made so that it will meet specifications on its composition allocating available
Lecture V. Numerical Optimization
 Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
ISM206 Lecture Optimization of Nonlinear Objective with Linear Constraints
 ISM206 Lecture Optimization of Nonlinear Objective with Linear Constraints Instructor: Prof. Kevin Ross Scribe: Nitish John October 18, 2011 1 The Basic Goal The main idea is to transform a given constrained
ISM206 Lecture Optimization of Nonlinear Objective with Linear Constraints Instructor: Prof. Kevin Ross Scribe: Nitish John October 18, 2011 1 The Basic Goal The main idea is to transform a given constrained
Gradient Descent. Dr. Xiaowei Huang
 Gradient Descent Dr. Xiaowei Huang https://cgi.csc.liv.ac.uk/~xiaowei/ Up to now, Three machine learning algorithms: decision tree learning k-nn linear regression only optimization objectives are discussed,
Gradient Descent Dr. Xiaowei Huang https://cgi.csc.liv.ac.uk/~xiaowei/ Up to now, Three machine learning algorithms: decision tree learning k-nn linear regression only optimization objectives are discussed,
Numerical optimization
 Numerical optimization Lecture 4 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 2 Longest Slowest Shortest Minimal Maximal
Numerical optimization Lecture 4 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 2 Longest Slowest Shortest Minimal Maximal
NonlinearOptimization
 1/35 NonlinearOptimization Pavel Kordík Department of Computer Systems Faculty of Information Technology Czech Technical University in Prague Jiří Kašpar, Pavel Tvrdík, 2011 Unconstrained nonlinear optimization,
1/35 NonlinearOptimization Pavel Kordík Department of Computer Systems Faculty of Information Technology Czech Technical University in Prague Jiří Kašpar, Pavel Tvrdík, 2011 Unconstrained nonlinear optimization,
5 Quasi-Newton Methods
 Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
CS711008Z Algorithm Design and Analysis
 CS711008Z Algorithm Design and Analysis Lecture 8 Linear programming: interior point method Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / 31 Outline Brief
CS711008Z Algorithm Design and Analysis Lecture 8 Linear programming: interior point method Dongbo Bu Institute of Computing Technology Chinese Academy of Sciences, Beijing, China 1 / 31 Outline Brief
Numerical Optimization
 Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
17 Solution of Nonlinear Systems
 17 Solution of Nonlinear Systems We now discuss the solution of systems of nonlinear equations. An important ingredient will be the multivariate Taylor theorem. Theorem 17.1 Let D = {x 1, x 2,..., x m
17 Solution of Nonlinear Systems We now discuss the solution of systems of nonlinear equations. An important ingredient will be the multivariate Taylor theorem. Theorem 17.1 Let D = {x 1, x 2,..., x m
Optimization Methods
 Optimization Methods Categorization of Optimization Problems Continuous Optimization Discrete Optimization Combinatorial Optimization Variational Optimization Common Optimization Concepts in Computer Vision
Optimization Methods Categorization of Optimization Problems Continuous Optimization Discrete Optimization Combinatorial Optimization Variational Optimization Common Optimization Concepts in Computer Vision
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
1 Numerical optimization
 Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Nonlinear Programming
 Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
, b = 0. (2) 1 2 The eigenvectors of A corresponding to the eigenvalues λ 1 = 1, λ 2 = 3 are
 1 2 The eigenvectors of A corresponding to the eigenvalues λ 1 = 1, λ 2 = 3 are") Quadratic forms We consider the quadratic function f : R 2 R defined by f(x) = 2 xt Ax b T x with x = (x, x 2 ) T, () where A R 2 2 is symmetric and b R 2. We will see that, depending on the eigenvalues
Quadratic forms We consider the quadratic function f : R 2 R defined by f(x) = 2 xt Ax b T x with x = (x, x 2 ) T, () where A R 2 2 is symmetric and b R 2. We will see that, depending on the eigenvalues
Unconstrained optimization
 Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
Math 411 Preliminaries
 Math 411 Preliminaries Provide a list of preliminary vocabulary and concepts Preliminary Basic Netwon s method, Taylor series expansion (for single and multiple variables), Eigenvalue, Eigenvector, Vector
Math 411 Preliminaries Provide a list of preliminary vocabulary and concepts Preliminary Basic Netwon s method, Taylor series expansion (for single and multiple variables), Eigenvalue, Eigenvector, Vector
15-850: Advanced Algorithms CMU, Fall 2018 HW #4 (out October 17, 2018) Due: October 28, 2018
 Due: October 28, 2018") 15-850: Advanced Algorithms CMU, Fall 2018 HW #4 (out October 17, 2018) Due: October 28, 2018 Usual rules. :) Exercises 1. Lots of Flows. Suppose you wanted to find an approximate solution to the following
15-850: Advanced Algorithms CMU, Fall 2018 HW #4 (out October 17, 2018) Due: October 28, 2018 Usual rules. :) Exercises 1. Lots of Flows. Suppose you wanted to find an approximate solution to the following
Nonlinear Optimization for Optimal Control
 Nonlinear Optimization for Optimal Control Pieter Abbeel UC Berkeley EECS Many slides and figures adapted from Stephen Boyd [optional] Boyd and Vandenberghe, Convex Optimization, Chapters 9 11 [optional]
Nonlinear Optimization for Optimal Control Pieter Abbeel UC Berkeley EECS Many slides and figures adapted from Stephen Boyd [optional] Boyd and Vandenberghe, Convex Optimization, Chapters 9 11 [optional]
Goals for This Lecture:
 Goals for This Lecture: Learn the Newton-Raphson method for finding real roots of real functions Learn the Bisection method for finding real roots of a real function Look at efficient implementations of
Goals for This Lecture: Learn the Newton-Raphson method for finding real roots of real functions Learn the Bisection method for finding real roots of a real function Look at efficient implementations of
Mathematical optimization
 Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
ECS550NFB Introduction to Numerical Methods using Matlab Day 2
 ECS550NFB Introduction to Numerical Methods using Matlab Day 2 Lukas Laffers lukas.laffers@umb.sk Department of Mathematics, University of Matej Bel June 9, 2015 Today Root-finding: find x that solves
ECS550NFB Introduction to Numerical Methods using Matlab Day 2 Lukas Laffers lukas.laffers@umb.sk Department of Mathematics, University of Matej Bel June 9, 2015 Today Root-finding: find x that solves
Quasi-Newton Methods
 Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Written Examination
 Division of Scientific Computing Department of Information Technology Uppsala University Optimization Written Examination 202-2-20 Time: 4:00-9:00 Allowed Tools: Pocket Calculator, one A4 paper with notes
Division of Scientific Computing Department of Information Technology Uppsala University Optimization Written Examination 202-2-20 Time: 4:00-9:00 Allowed Tools: Pocket Calculator, one A4 paper with notes
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
E5295/5B5749 Convex optimization with engineering applications. Lecture 8. Smooth convex unconstrained and equality-constrained minimization
 E5295/5B5749 Convex optimization with engineering applications Lecture 8 Smooth convex unconstrained and equality-constrained minimization A. Forsgren, KTH 1 Lecture 8 Convex optimization 2006/2007 Unconstrained
E5295/5B5749 Convex optimization with engineering applications Lecture 8 Smooth convex unconstrained and equality-constrained minimization A. Forsgren, KTH 1 Lecture 8 Convex optimization 2006/2007 Unconstrained
Matrix Derivatives and Descent Optimization Methods
 Matrix Derivatives and Descent Optimization Methods 1 Qiang Ning Department of Electrical and Computer Engineering Beckman Institute for Advanced Science and Techonology University of Illinois at Urbana-Champaign
Matrix Derivatives and Descent Optimization Methods 1 Qiang Ning Department of Electrical and Computer Engineering Beckman Institute for Advanced Science and Techonology University of Illinois at Urbana-Champaign
AM 205: lecture 19. Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods
 AM 205: lecture 19 Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods Optimality Conditions: Equality Constrained Case As another example of equality
AM 205: lecture 19 Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods Optimality Conditions: Equality Constrained Case As another example of equality
Gradient Descent. Sargur Srihari
 Gradient Descent Sargur srihari@cedar.buffalo.edu 1 Topics Simple Gradient Descent/Ascent Difficulties with Simple Gradient Descent Line Search Brent s Method Conjugate Gradient Descent Weight vectors
Gradient Descent Sargur srihari@cedar.buffalo.edu 1 Topics Simple Gradient Descent/Ascent Difficulties with Simple Gradient Descent Line Search Brent s Method Conjugate Gradient Descent Weight vectors
Optimization. Escuela de Ingeniería Informática de Oviedo. (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30
 Numerical Computation Optimization 1 / 30") Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
1 Number Systems and Errors 1
 Contents 1 Number Systems and Errors 1 1.1 Introduction................................ 1 1.2 Number Representation and Base of Numbers............. 1 1.2.1 Normalized Floating-point Representation...........
Contents 1 Number Systems and Errors 1 1.1 Introduction................................ 1 1.2 Number Representation and Base of Numbers............. 1 1.2.1 Normalized Floating-point Representation...........
Root Finding (and Optimisation)
") Root Finding (and Optimisation) M.Sc. in Mathematical Modelling & Scientific Computing, Practical Numerical Analysis Michaelmas Term 2018, Lecture 4 Root Finding The idea of root finding is simple we want
Root Finding (and Optimisation) M.Sc. in Mathematical Modelling & Scientific Computing, Practical Numerical Analysis Michaelmas Term 2018, Lecture 4 Root Finding The idea of root finding is simple we want
Structural and Multidisciplinary Optimization. P. Duysinx and P. Tossings
 Structural and Multidisciplinary Optimization P. Duysinx and P. Tossings 2018-2019 CONTACTS Pierre Duysinx Institut de Mécanique et du Génie Civil (B52/3) Phone number: 04/366.91.94 Email: P.Duysinx@uliege.be
Structural and Multidisciplinary Optimization P. Duysinx and P. Tossings 2018-2019 CONTACTS Pierre Duysinx Institut de Mécanique et du Génie Civil (B52/3) Phone number: 04/366.91.94 Email: P.Duysinx@uliege.be
Newton s Method. Ryan Tibshirani Convex Optimization /36-725
 Newton s Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, Properties and examples: f (y) = max x
Newton s Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, Properties and examples: f (y) = max x
EECS 275 Matrix Computation
 EECS 275 Matrix Computation Ming-Hsuan Yang Electrical Engineering and Computer Science University of California at Merced Merced, CA 95344 http://faculty.ucmerced.edu/mhyang Lecture 20 1 / 20 Overview
EECS 275 Matrix Computation Ming-Hsuan Yang Electrical Engineering and Computer Science University of California at Merced Merced, CA 95344 http://faculty.ucmerced.edu/mhyang Lecture 20 1 / 20 Overview
1 Newton s Method. Suppose we want to solve: x R. At x = x, f (x) can be approximated by:
 can be approximated by:") Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
Introduction to Scientific Computing
 Introduction to Scientific Computing Benson Muite benson.muite@ut.ee http://kodu.ut.ee/ benson https://courses.cs.ut.ee/2018/isc/spring 26 March 2018 [Public Domain,https://commons.wikimedia.org/wiki/File1
Introduction to Scientific Computing Benson Muite benson.muite@ut.ee http://kodu.ut.ee/ benson https://courses.cs.ut.ee/2018/isc/spring 26 March 2018 [Public Domain,https://commons.wikimedia.org/wiki/File1
Optimization and Root Finding. Kurt Hornik
 Optimization and Root Finding Kurt Hornik Basics Root finding and unconstrained smooth optimization are closely related: Solving ƒ () = 0 can be accomplished via minimizing ƒ () 2 Slide 2 Basics Root finding
Optimization and Root Finding Kurt Hornik Basics Root finding and unconstrained smooth optimization are closely related: Solving ƒ () = 0 can be accomplished via minimizing ƒ () 2 Slide 2 Basics Root finding
FALL 2018 MATH 4211/6211 Optimization Homework 4
 FALL 2018 MATH 4211/6211 Optimization Homework 4 This homework assignment is open to textbook, reference books, slides, and online resources, excluding any direct solution to the problem (such as solution
FALL 2018 MATH 4211/6211 Optimization Homework 4 This homework assignment is open to textbook, reference books, slides, and online resources, excluding any direct solution to the problem (such as solution
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
Minimization of Static! Cost Functions!
 Minimization of Static Cost Functions Robert Stengel Optimal Control and Estimation, MAE 546, Princeton University, 2017 J = Static cost function with constant control parameter vector, u Conditions for
Minimization of Static Cost Functions Robert Stengel Optimal Control and Estimation, MAE 546, Princeton University, 2017 J = Static cost function with constant control parameter vector, u Conditions for
Convex Optimization CMU-10725
 Convex Optimization CMU-10725 Quasi Newton Methods Barnabás Póczos & Ryan Tibshirani Quasi Newton Methods 2 Outline Modified Newton Method Rank one correction of the inverse Rank two correction of the
Convex Optimization CMU-10725 Quasi Newton Methods Barnabás Póczos & Ryan Tibshirani Quasi Newton Methods 2 Outline Modified Newton Method Rank one correction of the inverse Rank two correction of the
Multivariate Newton Minimanization
 Multivariate Newton Minimanization Optymalizacja syntezy biosurfaktantu Rhamnolipid Rhamnolipids are naturally occuring glycolipid produced commercially by the Pseudomonas aeruginosa species of bacteria.
Multivariate Newton Minimanization Optymalizacja syntezy biosurfaktantu Rhamnolipid Rhamnolipids are naturally occuring glycolipid produced commercially by the Pseudomonas aeruginosa species of bacteria.
OPER 627: Nonlinear Optimization Lecture 14: Mid-term Review
 OPER 627: Nonlinear Optimization Lecture 14: Mid-term Review Department of Statistical Sciences and Operations Research Virginia Commonwealth University Oct 16, 2013 (Lecture 14) Nonlinear Optimization
OPER 627: Nonlinear Optimization Lecture 14: Mid-term Review Department of Statistical Sciences and Operations Research Virginia Commonwealth University Oct 16, 2013 (Lecture 14) Nonlinear Optimization
Comparative study of Optimization methods for Unconstrained Multivariable Nonlinear Programming Problems
 International Journal of Scientific and Research Publications, Volume 3, Issue 10, October 013 1 ISSN 50-3153 Comparative study of Optimization methods for Unconstrained Multivariable Nonlinear Programming
International Journal of Scientific and Research Publications, Volume 3, Issue 10, October 013 1 ISSN 50-3153 Comparative study of Optimization methods for Unconstrained Multivariable Nonlinear Programming
Numerical Analysis of Electromagnetic Fields
 Pei-bai Zhou Numerical Analysis of Electromagnetic Fields With 157 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Part 1 Universal Concepts
Pei-bai Zhou Numerical Analysis of Electromagnetic Fields With 157 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Part 1 Universal Concepts
Convex Optimization. Newton s method. ENSAE: Optimisation 1/44
 Convex Optimization Newton s method ENSAE: Optimisation 1/44 Unconstrained minimization minimize f(x) f convex, twice continuously differentiable (hence dom f open) we assume optimal value p = inf x f(x)
Convex Optimization Newton s method ENSAE: Optimisation 1/44 Unconstrained minimization minimize f(x) f convex, twice continuously differentiable (hence dom f open) we assume optimal value p = inf x f(x)
SECTION: CONTINUOUS OPTIMISATION LECTURE 4: QUASI-NEWTON METHODS
 SECTION: CONTINUOUS OPTIMISATION LECTURE 4: QUASI-NEWTON METHODS HONOUR SCHOOL OF MATHEMATICS, OXFORD UNIVERSITY HILARY TERM 2005, DR RAPHAEL HAUSER 1. The Quasi-Newton Idea. In this lecture we will discuss
SECTION: CONTINUOUS OPTIMISATION LECTURE 4: QUASI-NEWTON METHODS HONOUR SCHOOL OF MATHEMATICS, OXFORD UNIVERSITY HILARY TERM 2005, DR RAPHAEL HAUSER 1. The Quasi-Newton Idea. In this lecture we will discuss
Convex Optimization. Problem set 2. Due Monday April 26th
 Convex Optimization Problem set 2 Due Monday April 26th 1 Gradient Decent without Line-search In this problem we will consider gradient descent with predetermined step sizes. That is, instead of determining
Convex Optimization Problem set 2 Due Monday April 26th 1 Gradient Decent without Line-search In this problem we will consider gradient descent with predetermined step sizes. That is, instead of determining
Lecture Notes: Geometric Considerations in Unconstrained Optimization
 Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
Appendix A Taylor Approximations and Definite Matrices
 Appendix A Taylor Approximations and Definite Matrices Taylor approximations provide an easy way to approximate a function as a polynomial, using the derivatives of the function. We know, from elementary
Appendix A Taylor Approximations and Definite Matrices Taylor approximations provide an easy way to approximate a function as a polynomial, using the derivatives of the function. We know, from elementary
Gradient Descent Methods
 Lab 18 Gradient Descent Methods Lab Objective: Many optimization methods fall under the umbrella of descent algorithms. The idea is to choose an initial guess, identify a direction from this point along
Lab 18 Gradient Descent Methods Lab Objective: Many optimization methods fall under the umbrella of descent algorithms. The idea is to choose an initial guess, identify a direction from this point along
Constrained optimization. Unconstrained optimization. One-dimensional. Multi-dimensional. Newton with equality constraints. Active-set method.
 Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
LECTURE 22: SWARM INTELLIGENCE 3 / CLASSICAL OPTIMIZATION
 15-382 COLLECTIVE INTELLIGENCE - S19 LECTURE 22: SWARM INTELLIGENCE 3 / CLASSICAL OPTIMIZATION TEACHER: GIANNI A. DI CARO WHAT IF WE HAVE ONE SINGLE AGENT PSO leverages the presence of a swarm: the outcome
15-382 COLLECTIVE INTELLIGENCE - S19 LECTURE 22: SWARM INTELLIGENCE 3 / CLASSICAL OPTIMIZATION TEACHER: GIANNI A. DI CARO WHAT IF WE HAVE ONE SINGLE AGENT PSO leverages the presence of a swarm: the outcome
Constrained Optimization
 1 / 22 Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University March 30, 2015 2 / 22 1. Equality constraints only 1.1 Reduced gradient 1.2 Lagrange
1 / 22 Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University March 30, 2015 2 / 22 1. Equality constraints only 1.1 Reduced gradient 1.2 Lagrange
Numerical Optimization Techniques
 Numerical Optimization Techniques Léon Bottou NEC Labs America COS 424 3/2/2010 Today s Agenda Goals Representation Capacity Control Operational Considerations Computational Considerations Classification,
Numerical Optimization Techniques Léon Bottou NEC Labs America COS 424 3/2/2010 Today s Agenda Goals Representation Capacity Control Operational Considerations Computational Considerations Classification,
Higher-Order Methods
 Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Conditional Gradient (Frank-Wolfe) Method
 Method") Conditional Gradient (Frank-Wolfe) Method Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 1 Outline Today: Conditional gradient method Convergence analysis Properties
Conditional Gradient (Frank-Wolfe) Method Lecturer: Aarti Singh Co-instructor: Pradeep Ravikumar Convex Optimization 10-725/36-725 1 Outline Today: Conditional gradient method Convergence analysis Properties
Lecture 23 Branch-and-Bound Algorithm. November 3, 2009
 Branch-and-Bound Algorithm November 3, 2009 Outline Lecture 23 Modeling aspect: Either-Or requirement Special ILPs: Totally unimodular matrices Branch-and-Bound Algorithm Underlying idea Terminology Formal
Branch-and-Bound Algorithm November 3, 2009 Outline Lecture 23 Modeling aspect: Either-Or requirement Special ILPs: Totally unimodular matrices Branch-and-Bound Algorithm Underlying idea Terminology Formal
Motivation. Lecture 2 Topics from Optimization and Duality. network utility maximization (NUM) problem:
 problem:") CDS270 Maryam Fazel Lecture 2 Topics from Optimization and Duality Motivation network utility maximization (NUM) problem: consider a network with S sources (users), each sending one flow at rate x s, through
CDS270 Maryam Fazel Lecture 2 Topics from Optimization and Duality Motivation network utility maximization (NUM) problem: consider a network with S sources (users), each sending one flow at rate x s, through
Conjugate-Gradient. Learn about the Conjugate-Gradient Algorithm and its Uses. Descent Algorithms and the Conjugate-Gradient Method. Qx = b.
 Lab 1 Conjugate-Gradient Lab Objective: Learn about the Conjugate-Gradient Algorithm and its Uses Descent Algorithms and the Conjugate-Gradient Method There are many possibilities for solving a linear
Lab 1 Conjugate-Gradient Lab Objective: Learn about the Conjugate-Gradient Algorithm and its Uses Descent Algorithms and the Conjugate-Gradient Method There are many possibilities for solving a linear
CS-E4830 Kernel Methods in Machine Learning
 CS-E4830 Kernel Methods in Machine Learning Lecture 3: Convex optimization and duality Juho Rousu 27. September, 2017 Juho Rousu 27. September, 2017 1 / 45 Convex optimization Convex optimisation This
CS-E4830 Kernel Methods in Machine Learning Lecture 3: Convex optimization and duality Juho Rousu 27. September, 2017 Juho Rousu 27. September, 2017 1 / 45 Convex optimization Convex optimisation This
Lecture 18: Optimization Programming
 Fall, 2016 Outline Unconstrained Optimization 1 Unconstrained Optimization 2 Equality-constrained Optimization Inequality-constrained Optimization Mixture-constrained Optimization 3 Quadratic Programming
Fall, 2016 Outline Unconstrained Optimization 1 Unconstrained Optimization 2 Equality-constrained Optimization Inequality-constrained Optimization Mixture-constrained Optimization 3 Quadratic Programming
PETROV-GALERKIN METHODS
 Chapter 7 PETROV-GALERKIN METHODS 7.1 Energy Norm Minimization 7.2 Residual Norm Minimization 7.3 General Projection Methods 7.1 Energy Norm Minimization Saad, Sections 5.3.1, 5.2.1a. 7.1.1 Methods based
Chapter 7 PETROV-GALERKIN METHODS 7.1 Energy Norm Minimization 7.2 Residual Norm Minimization 7.3 General Projection Methods 7.1 Energy Norm Minimization Saad, Sections 5.3.1, 5.2.1a. 7.1.1 Methods based
2. Quasi-Newton methods
 L. Vandenberghe EE236C (Spring 2016) 2. Quasi-Newton methods variable metric methods quasi-newton methods BFGS update limited-memory quasi-newton methods 2-1 Newton method for unconstrained minimization
L. Vandenberghe EE236C (Spring 2016) 2. Quasi-Newton methods variable metric methods quasi-newton methods BFGS update limited-memory quasi-newton methods 2-1 Newton method for unconstrained minimization
Introduction to Applied Linear Algebra with MATLAB
 Sigam Series in Applied Mathematics Volume 7 Rizwan Butt Introduction to Applied Linear Algebra with MATLAB Heldermann Verlag Contents Number Systems and Errors 1 1.1 Introduction 1 1.2 Number Representation
Sigam Series in Applied Mathematics Volume 7 Rizwan Butt Introduction to Applied Linear Algebra with MATLAB Heldermann Verlag Contents Number Systems and Errors 1 1.1 Introduction 1 1.2 Number Representation
Review for Exam 2 Ben Wang and Mark Styczynski
 Review for Exam Ben Wang and Mark Styczynski This is a rough approximation of what we went over in the review session. This is actually more detailed in portions than what we went over. Also, please note
Review for Exam Ben Wang and Mark Styczynski This is a rough approximation of what we went over in the review session. This is actually more detailed in portions than what we went over. Also, please note
5 Handling Constraints
 5 Handling Constraints Engineering design optimization problems are very rarely unconstrained. Moreover, the constraints that appear in these problems are typically nonlinear. This motivates our interest
5 Handling Constraints Engineering design optimization problems are very rarely unconstrained. Moreover, the constraints that appear in these problems are typically nonlinear. This motivates our interest
MVE165/MMG631 Linear and integer optimization with applications Lecture 13 Overview of nonlinear programming. Ann-Brith Strömberg
 MVE165/MMG631 Overview of nonlinear programming Ann-Brith Strömberg 2015 05 21 Areas of applications, examples (Ch. 9.1) Structural optimization Design of aircraft, ships, bridges, etc Decide on the material
MVE165/MMG631 Overview of nonlinear programming Ann-Brith Strömberg 2015 05 21 Areas of applications, examples (Ch. 9.1) Structural optimization Design of aircraft, ships, bridges, etc Decide on the material
Multidisciplinary System Design Optimization (MSDO)
") Multidisciplinary System Design Optimization (MSDO) Numerical Optimization II Lecture 8 Karen Willcox 1 Massachusetts Institute of Technology - Prof. de Weck and Prof. Willcox Today s Topics Sequential
Multidisciplinary System Design Optimization (MSDO) Numerical Optimization II Lecture 8 Karen Willcox 1 Massachusetts Institute of Technology - Prof. de Weck and Prof. Willcox Today s Topics Sequential
1. Method 1: bisection. The bisection methods starts from two points a 0 and b 0 such that
 Chapter 4 Nonlinear equations 4.1 Root finding Consider the problem of solving any nonlinear relation g(x) = h(x) in the real variable x. We rephrase this problem as one of finding the zero (root) of a
Chapter 4 Nonlinear equations 4.1 Root finding Consider the problem of solving any nonlinear relation g(x) = h(x) in the real variable x. We rephrase this problem as one of finding the zero (root) of a
Shiqian Ma, MAT-258A: Numerical Optimization 1. Chapter 3. Gradient Method
 Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 3 Gradient Method Shiqian Ma, MAT-258A: Numerical Optimization 2 3.1. Gradient method Classical gradient method: to minimize a differentiable convex
Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 3 Gradient Method Shiqian Ma, MAT-258A: Numerical Optimization 2 3.1. Gradient method Classical gradient method: to minimize a differentiable convex
ICS-E4030 Kernel Methods in Machine Learning
 ICS-E4030 Kernel Methods in Machine Learning Lecture 3: Convex optimization and duality Juho Rousu 28. September, 2016 Juho Rousu 28. September, 2016 1 / 38 Convex optimization Convex optimisation This
ICS-E4030 Kernel Methods in Machine Learning Lecture 3: Convex optimization and duality Juho Rousu 28. September, 2016 Juho Rousu 28. September, 2016 1 / 38 Convex optimization Convex optimisation This
Neural Network Training
 Neural Network Training Sargur Srihari Topics in Network Training 0. Neural network parameters Probabilistic problem formulation Specifying the activation and error functions for Regression Binary classification
Neural Network Training Sargur Srihari Topics in Network Training 0. Neural network parameters Probabilistic problem formulation Specifying the activation and error functions for Regression Binary classification
Lecture 7: Minimization or maximization of functions (Recipes Chapter 10)
") Lecture 7: Minimization or maximization of functions (Recipes Chapter 10) Actively studied subject for several reasons: Commonly encountered problem: e.g. Hamilton s and Lagrange s principles, economics
Lecture 7: Minimization or maximization of functions (Recipes Chapter 10) Actively studied subject for several reasons: Commonly encountered problem: e.g. Hamilton s and Lagrange s principles, economics
AM 205: lecture 19. Last time: Conditions for optimality, Newton s method for optimization Today: survey of optimization methods
 AM 205: lecture 19 Last time: Conditions for optimality, Newton s method for optimization Today: survey of optimization methods Quasi-Newton Methods General form of quasi-newton methods: x k+1 = x k α
AM 205: lecture 19 Last time: Conditions for optimality, Newton s method for optimization Today: survey of optimization methods Quasi-Newton Methods General form of quasi-newton methods: x k+1 = x k α
Part 4: Active-set methods for linearly constrained optimization. Nick Gould (RAL)
") Part 4: Active-set methods for linearly constrained optimization Nick Gould RAL fx subject to Ax b Part C course on continuoue optimization LINEARLY CONSTRAINED MINIMIZATION fx subject to Ax { } b where
Part 4: Active-set methods for linearly constrained optimization Nick Gould RAL fx subject to Ax b Part C course on continuoue optimization LINEARLY CONSTRAINED MINIMIZATION fx subject to Ax { } b where
MATHEMATICS FOR COMPUTER VISION WEEK 2 LINEAR SYSTEMS. Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year
 1 MATHEMATICS FOR COMPUTER VISION WEEK 2 LINEAR SYSTEMS Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 2 Linear Systems and solutions Systems of linear
1 MATHEMATICS FOR COMPUTER VISION WEEK 2 LINEAR SYSTEMS Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 2 Linear Systems and solutions Systems of linear
Chapter 2. Optimization. Gradients, convexity, and ALS
 Chapter 2 Optimization Gradients, convexity, and ALS Contents Background Gradient descent Stochastic gradient descent Newton s method Alternating least squares KKT conditions 2 Motivation We can solve
Chapter 2 Optimization Gradients, convexity, and ALS Contents Background Gradient descent Stochastic gradient descent Newton s method Alternating least squares KKT conditions 2 Motivation We can solve
Numerical solution of Least Squares Problems 1/32
 Numerical solution of Least Squares Problems 1/32 Linear Least Squares Problems Suppose that we have a matrix A of the size m n and the vector b of the size m 1. The linear least square problem is to find
Numerical solution of Least Squares Problems 1/32 Linear Least Squares Problems Suppose that we have a matrix A of the size m n and the vector b of the size m 1. The linear least square problem is to find
M.A. Botchev. September 5, 2014
 Rome-Moscow school of Matrix Methods and Applied Linear Algebra 2014 A short introduction to Krylov subspaces for linear systems, matrix functions and inexact Newton methods. Plan and exercises. M.A. Botchev
Rome-Moscow school of Matrix Methods and Applied Linear Algebra 2014 A short introduction to Krylov subspaces for linear systems, matrix functions and inexact Newton methods. Plan and exercises. M.A. Botchev
Motivation: We have already seen an example of a system of nonlinear equations when we studied Gaussian integration (p.8 of integration notes)
") AMSC/CMSC 460 Computational Methods, Fall 2007 UNIT 5: Nonlinear Equations Dianne P. O Leary c 2001, 2002, 2007 Solving Nonlinear Equations and Optimization Problems Read Chapter 8. Skip Section 8.1.1.
AMSC/CMSC 460 Computational Methods, Fall 2007 UNIT 5: Nonlinear Equations Dianne P. O Leary c 2001, 2002, 2007 Solving Nonlinear Equations and Optimization Problems Read Chapter 8. Skip Section 8.1.1.
Computational Finance
 Department of Mathematics at University of California, San Diego Computational Finance Optimization Techniques [Lecture 2] Michael Holst January 9, 2017 Contents 1 Optimization Techniques 3 1.1 Examples
Department of Mathematics at University of California, San Diego Computational Finance Optimization Techniques [Lecture 2] Michael Holst January 9, 2017 Contents 1 Optimization Techniques 3 1.1 Examples
Chapter 4. Unconstrained optimization
 Chapter 4. Unconstrained optimization Version: 28-10-2012 Material: (for details see) Chapter 11 in [FKS] (pp.251-276) A reference e.g. L.11.2 refers to the corresponding Lemma in the book [FKS] PDF-file
Chapter 4. Unconstrained optimization Version: 28-10-2012 Material: (for details see) Chapter 11 in [FKS] (pp.251-276) A reference e.g. L.11.2 refers to the corresponding Lemma in the book [FKS] PDF-file
nonrobust estimation The n measurement vectors taken together give the vector X R N. The unknown parameter vector is P R M.
 Introduction to nonlinear LS estimation R. I. Hartley and A. Zisserman: Multiple View Geometry in Computer Vision. Cambridge University Press, 2ed., 2004. After Chapter 5 and Appendix 6. We will use x
Introduction to nonlinear LS estimation R. I. Hartley and A. Zisserman: Multiple View Geometry in Computer Vision. Cambridge University Press, 2ed., 2004. After Chapter 5 and Appendix 6. We will use x
Introduction to gradient descent
 6-1: Introduction to gradient descent Prof. J.C. Kao, UCLA Introduction to gradient descent Derivation and intuitions Hessian 6-2: Introduction to gradient descent Prof. J.C. Kao, UCLA Introduction Our
6-1: Introduction to gradient descent Prof. J.C. Kao, UCLA Introduction to gradient descent Derivation and intuitions Hessian 6-2: Introduction to gradient descent Prof. J.C. Kao, UCLA Introduction Our
Lecture 17: Numerical Optimization October 2014
 Lecture 17: Numerical Optimization 36-350 22 October 2014 Agenda Basics of optimization Gradient descent Newton s method Curve-fitting R: optim, nls Reading: Recipes 13.1 and 13.2 in The R Cookbook Optional
Lecture 17: Numerical Optimization 36-350 22 October 2014 Agenda Basics of optimization Gradient descent Newton s method Curve-fitting R: optim, nls Reading: Recipes 13.1 and 13.2 in The R Cookbook Optional
CE 191: Civil & Environmental Engineering Systems Analysis. LEC 17 : Final Review
 CE 191: Civil & Environmental Engineering Systems Analysis LEC 17 : Final Review Professor Scott Moura Civil & Environmental Engineering University of California, Berkeley Fall 2014 Prof. Moura UC Berkeley
CE 191: Civil & Environmental Engineering Systems Analysis LEC 17 : Final Review Professor Scott Moura Civil & Environmental Engineering University of California, Berkeley Fall 2014 Prof. Moura UC Berkeley
Inverse Problems and Optimal Design in Electricity and Magnetism
 Inverse Problems and Optimal Design in Electricity and Magnetism P. Neittaanmäki Department of Mathematics, University of Jyväskylä M. Rudnicki Institute of Electrical Engineering, Warsaw and A. Savini
Inverse Problems and Optimal Design in Electricity and Magnetism P. Neittaanmäki Department of Mathematics, University of Jyväskylä M. Rudnicki Institute of Electrical Engineering, Warsaw and A. Savini
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted