Optimization Methods
|
|
|
- Laurence Camron Richardson
- 5 years ago
- Views:
Transcription
1 Optimization Methods
2 Decision making Examples: determining which ingredients and in what quantities to add to a mixture being made so that it will meet specifications on its composition allocating available funds among various competing agencies deciding which route to take to go to a new location in the city Decision making always involves making a choice between various possible alternatives
3 Categories of Decision making problems Category 1: The set of possible alternatives for the decision is a finite discrete set typically consisting of a small number of elements. Example: A teenage girl knows four boys all of whom she likes, and has to decide who among them to go steady with. Solution: scoring methods Category 2: The number of possible alternatives is either infinite, or finite but very large, and the decision may be required to satisfy some restrictions and constraints Solution: unconstrained and constrained optimization methods
4 The scoring method an example Rita has been dating 4 boys off and on over the last 3 years, and has come to know each of them very well. Who among the four boys would be her best choice?
5 Category 2 Decision problems 1. Get a precise definition of the problem, all relevant data and information on it. Uncontrollable factors (random variables) Controllable inputs (decision variables) 2. Construct a mathematical (optimization) model of the problem. Build objective functions and constraints 3. Solve the model Apply the most appropriate algorithms for the given problem 4. Implement the solution
6 Optimization models Single x Multiobjective models Static x Dynamic models Deterministic x Stochastic models
7 Problem specification Suppose we have a cost function (or objective function) Our aim is to find values of the parameters (decision variables) x that minimize this function Subject to the following constraints: equality: nonequality: If we seek a maximum of f(x) (profit function) it is equivalent to seeking a minimum of f(x)


8 Books to read Practical Optimization Philip E. Gill, Walter Murray, and Margaret H. Wright, Academic Press, 1981 Practical Optimization: Algorithms and Engineering Applications Andreas Antoniou and Wu-Sheng Lu 2007 Both cover unconstrained and constrained optimization. Very clear and comprehensive.
 www.nrbook.com/a/bookcpdf.php (2007 ed.) www.nrbook.com NEOS Guide www-fp.mcs.anl.")
9 Further reading and web resources Numerical Recipes in C (or C++) : The Art of Scientific Computing William H. Press, Brian P. Flannery, Saul A. Teukolsky, William T. Vetterling Good chapter on optimization Available on line at (1992 ed.) (2007 ed.) NEOS Guide www-fp.mcs.anl.gov/otc/guide/ This powerpoint presentation
10 Types of minima f(x) strong local minimum weak local minimum strong global minimum strong local minimum feasible region x which of the minima is found depends on the starting point such minima often occur in real applications
11 Unconstrained univariate optimization Assume we can start close to the global minimum How to determine the minimum? Search methods (Dichotomous, Fibonacci, Golden-Section) Approximation methods 1. Polynomial interpolation 2. Newton method Combination of both (alg. of Davies, Swann, and Campey)
12 Search methods Start with the interval ( bracket ) [x L, x U ] such that the minimum x* lies inside. Evaluate f(x) at two point inside the bracket. Reduce the bracket. Repeat the process. Can be applied to any function and differentiability is not essential.
13 Search methods x L x U x L x L x U x L x L x U Dichotomous x L x L x U x U Fibonacci:
14 1D function As an example consider the function (assume we do not know the actual function expression from now on)
15 Gradient descent Given a starting location, x 0, examine df/dx and move in the downhill direction to generate a new estimate, x 1 = x 0 + δx How to determine the step size δx?
16 Polynomial interpolation Bracket the minimum. Fit a quadratic or cubic polynomial which interpolates f(x) at some points in the interval. Jump to the (easily obtained) minimum of the polynomial. Throw away the worst point and repeat the process.
17 Polynomial interpolation Quadratic interpolation using 3 points, 2 iterations Other methods to interpolate? 2 points and one gradient Cubic interpolation
18 Newton method Fit a quadratic approximation to f(x) using both gradient and curvature information at x. Expand f(x) locally using a Taylor series. Find the δx which minimizes this local quadratic approximation. Update x.
19 Newton method avoids the need to bracket the root quadratic convergence (decimal accuracy doubles at every iteration)
20 Newton method Global convergence of Newton s method is poor. Often fails if the starting point is too far from the minimum. in practice, must be used with a globalization strategy which reduces the step length until function decrease is assured

21 Extension to N (multivariate) dimensions How big N can be? problem sizes can vary from a handful of parameters to many thousands We will consider examples for N=2, so that cost function surfaces can be visualized.
22 An Optimization Algorithm Start at x 0, k = Compute a search direction p k 2. Compute a step length α k, such that f(x k + α k p k ) < f(x k ) 3. Update x k = x k + α k p k k = k+1 4. Check for convergence (stopping criteria) e.g. df/dx = 0 Reduces optimization in N dimensions to a series of (1D) line minimizations

 is the")
23 Taylor expansion A function may be approximated locally by its Taylor series expansion about a point x* where the gradient is the vector and the Hessian H(x*) is the symmetric matrix
24 Quadratic functions The vector g and the Hessian H are constant. Second order approximation of any function by the Taylor expansion is a quadratic function. We will assume only quadratic functions for a while.

25 Necessary conditions for a minimum Expand f(x) about a stationary point x* in direction p since at a stationary point At a stationary point the behavior is determined by H

26 H is a symmetric matrix, and so has orthogonal eigenvectors As α increases, f(x* + αu i ) increases, decreases or is unchanging according to whether λ i is positive, negative or zero



27 Examples of quadratic functions Case 1: both eigenvalues positive with positive definite minimum



28 Examples of quadratic functions Case 2: eigenvalues have different sign with indefinite saddle point



29 Examples of quadratic functions Case 3: one eigenvalues is zero with positive semidefinite parabolic cylinder
30 Optimization for quadratic functions Assume that H is positive definite There is a unique minimum at If N is large, it is not feasible to perform this inversion directly.
31 Steepest descent Basic principle is to minimize the N-dimensional function by a series of 1D line-minimizations: The steepest descent method chooses p k to be parallel to the gradient Step-size α k is chosen to minimize f(x k + α k p k ). For quadratic forms there is a closed form solution: Prove it!
.")
32 Steepest descent The gradient is everywhere perpendicular to the contour lines. After each line minimization the new gradient is always orthogonal to the previous step direction (true of any line minimization). Consequently, the iterates tend to zig-zag down the valley in a very inefficient manner
33 Conjugate gradient Each p k is chosen to be conjugate to all previous search directions with respect to the Hessian H: The resulting search directions are mutually linearly independent. Prove it! Remarkably, p k can be chosen using only knowledge of p k-1,, and

34 Conjugate gradient An N-dimensional quadratic form can be minimized in at most N conjugate descent steps. 3 different starting points. Minimum is reached in exactly 2 steps.


35 Optimization for General functions Apply methods developed using quadratic Taylor series expansion
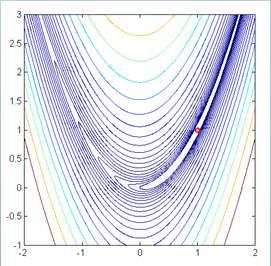
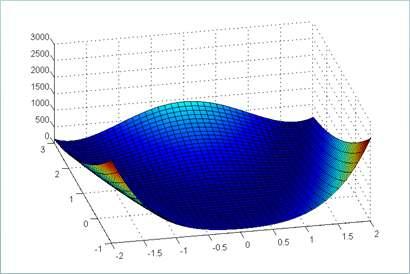
36 Rosenbrock s function Minimum at [1, 1]
37 Steepest descent The 1D line minimization must be performed using one of the earlier methods (usually cubic polynomial interpolation) The zig-zag behaviour is clear in the zoomed view The algorithm crawls down the valley

38 Conjugate gradient Again, an explicit line minimization must be used at every step The algorithm converges in 98 iterations Far superior to steepest descent

39 Newton method Expand f(x) by its Taylor series about the point x k where the gradient is the vector and the Hessian is the symmetric matrix
40 Newton method For a minimum we require that, and so with solution. This gives the iterative update If f(x) is quadratic, then the solution is found in one step. The method has quadratic convergence (as in the 1D case). The solution is guaranteed to be a downhill direction. Rather than jump straight to the minimum, it is better to perform a line minimization which ensures global convergence If H=I then this reduces to steepest descent.
41 Newton method - example The algorithm converges in only 18 iterations compared to the 98 for conjugate gradients. However, the method requires computing the Hessian matrix at each iteration this is not always feasible
42 Summary of the 1 st lecture Minimization of 1-D functions Search methods Approximation methods N-D functions -> finding the descent direction Taylor series -> Quadratic functions Steepest descent Conjugate Gradient Newton method
43 Quasi-Newton methods If the problem size is large and the Hessian matrix is dense then it may be infeasible/inconvenient to compute it directly. Quasi-Newton methods avoid this problem by keeping a rolling estimate of H(x), updated at each iteration using new gradient information. Common schemes are due to Broyden, Goldfarb, Fletcher and Shanno (BFGS), and also Davidson, Fletcher and Powell (DFP). The idea is based on the fact that for quadratic functions holds and by accumulating g k s and x k s we can calculate H.
44 Quasi-Newton BFGS method Set H 0 = I. Update according to where The matrix inverse can also be computed in this way. Directions δ k s form a conjugate set. H k+1 is positive definite if H k is positive definite. The estimate H k is used to form a local quadratic approximation as before
45 BFGS example The method converges in 34 iterations, compared to 18 for the full-newton method
46 Non-linear least squares It is very common in applications for a cost function f(x) to be the sum of a large number of squared residuals If each residual depends non-linearly on the parameters x then the minimization of f(x) is a non-linear least squares problem.

47 Non-linear least squares The M N Jacobian of the vector of residuals r is defined as Consider Hence
48 Non-linear least squares For the Hessian holds Gauss-Newton approximation Note that the second-order term in the Hessian is multiplied by the residuals r i. In most problems, the residuals will typically be small. Also, at the minimum, the residuals will typically be distributed with mean = 0. For these reasons, the second-order term is often ignored. Hence, explicit computation of the full Hessian can again be avoided.
49 Gauss-Newton example The minimization of the Rosenbrock function can be written as a least-squares problem with residual vector
50 Gauss-Newton example minimization with the Gauss-Newton approximation with line search takes only 11 iterations
51 Comparison CG Newton Quasi-Newton Gauss-Newton
52 Simplex
53 Constrained Optimization Subject to: Equality constraints: Nonequality constraints: Constraints define a feasible region, which is nonempty. The idea is to convert it to an unconstrained optimization.
54 Equality constraints Minimize f(x) subject to: for The gradient of f(x) at a local minimizer is equal to the linear combination of the gradients of a i (x) with Lagrange multipliers as the coefficients.
55 f 3 > f 2 > f 1 f 3 > f 2 > f 1 x* is a minimizer, λ*<0 is not a minimizer x* is a minimizer, λ*>0 f 3 > f 2 > f 1 x* is not a minimizer
56 3D Example

57 3D Example f(x) = 3 Gradients of constraints and objective function are linearly independent.
58 3D Example f(x) = 1 Gradients of constraints and objective function are linearly dependent.
59 Inequality constraints Minimize f(x) subject to: for The gradient of f(x) at a local minimizer is equal to the linear combination of the gradients of c j (x), which are active ( c j (x) = 0 ) and Lagrange multipliers must be positive,
60 f 3 > f 2 > f 1 f 3 > f 2 > f 1 No active constraints at x*, x* is not a minimizer, µ<0 f 3 > f 2 > f 1 x* is a minimizer, µ>0
61 Lagrangien We can introduce the function (Lagrangien) The necessary condition for the local minimizer is and it must be a feasible point (i.e. constraints are satisfied). These are Karush-Kuhn-Tucker conditions
62 Quadratic Programming (QP) Like in the unconstrained case, it is important to study quadratic functions. Why? Because general nonlinear problems are solved as a sequence of minimizations of their quadratic approximations. QP with constraints Minimize subject to linear constraints. H is symmetric and positive semidefinite.
63 QP with Equality Constraints Minimize Subject to: Ass.: A is p N and has full row rank (p<n) Convert to unconstrained problem by variable elimination: Z is the null space of A A + is the pseudo-inverse. Minimize This quadratic unconstrained problem can be solved, e.g., by Newton method.
64 QP with inequality constraints Minimize Subject to: First we check if the unconstrained minimizer is feasible. If yes we are done. If not we know that the minimizer must be on the boundary and we proceed with an active-set method. x k is the current feasible point is the index set of active constraints at x k Next iterate is given by
65 Active-set method How to find d k? To remain active thus The objective function at x k +d becomes where The major step is a QP sub-problem subject to: Two situations may occur: or
66 Active-set method We check if KKT conditions are satisfied and If YES we are done. If NO we remove the constraint from the active set with the most negative and solve the QP sub-problem again but this time with less active constraints. We can move to but some inactive constraints may be violated on the way. In this case, we move by till the first inactive constraint becomes active, update, and solve the QP sub-problem again but this time with more active constraints.
67 General Nonlinear Optimization Minimize f(x) subject to: where the objective function and constraints are nonlinear. 1. For a given approximate Lagrangien by Taylor series QP problem 2. Solve QP descent direction 3. Perform line search in the direction 4. Update Lagrange multipliers 5. Repeat from Step 1.
68 General Nonlinear Optimization Lagrangien At the kth iterate: and we want to compute a set of increments: First order approximation of and constraints: These approximate KKT conditions corresponds to a QP program

69 SQP example Minimize subject to:
70 Linear Programming (LP) LP is common in economy and is meaningful only if it is with constraints. Two forms: 1. Minimize subject to: 2. Minimize subject to: A is p N and has full row rank (p<n) Prove it! QP can solve LP. If the LP minimizer exists it must be one of the vertices of the feasible region. A fast method that considers vertices is the Simplex method.
Optimization Methods
 Optimization Methods Categorization of Optimization Problems Continuous Optimization Discrete Optimization Combinatorial Optimization Variational Optimization Common Optimization Concepts in Computer Vision
Optimization Methods Categorization of Optimization Problems Continuous Optimization Discrete Optimization Combinatorial Optimization Variational Optimization Common Optimization Concepts in Computer Vision
NonlinearOptimization
 1/35 NonlinearOptimization Pavel Kordík Department of Computer Systems Faculty of Information Technology Czech Technical University in Prague Jiří Kašpar, Pavel Tvrdík, 2011 Unconstrained nonlinear optimization,
1/35 NonlinearOptimization Pavel Kordík Department of Computer Systems Faculty of Information Technology Czech Technical University in Prague Jiří Kašpar, Pavel Tvrdík, 2011 Unconstrained nonlinear optimization,
Nonlinear Optimization: What s important?
 Nonlinear Optimization: What s important? Julian Hall 10th May 2012 Convexity: convex problems A local minimizer is a global minimizer A solution of f (x) = 0 (stationary point) is a minimizer A global
Nonlinear Optimization: What s important? Julian Hall 10th May 2012 Convexity: convex problems A local minimizer is a global minimizer A solution of f (x) = 0 (stationary point) is a minimizer A global
Optimization: Nonlinear Optimization without Constraints. Nonlinear Optimization without Constraints 1 / 23
 Optimization: Nonlinear Optimization without Constraints Nonlinear Optimization without Constraints 1 / 23 Nonlinear optimization without constraints Unconstrained minimization min x f(x) where f(x) is
Optimization: Nonlinear Optimization without Constraints Nonlinear Optimization without Constraints 1 / 23 Nonlinear optimization without constraints Unconstrained minimization min x f(x) where f(x) is
AM 205: lecture 19. Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods
 AM 205: lecture 19 Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods Optimality Conditions: Equality Constrained Case As another example of equality
AM 205: lecture 19 Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods Optimality Conditions: Equality Constrained Case As another example of equality
Lecture V. Numerical Optimization
 Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
AM 205: lecture 19. Last time: Conditions for optimality, Newton s method for optimization Today: survey of optimization methods
 AM 205: lecture 19 Last time: Conditions for optimality, Newton s method for optimization Today: survey of optimization methods Quasi-Newton Methods General form of quasi-newton methods: x k+1 = x k α
AM 205: lecture 19 Last time: Conditions for optimality, Newton s method for optimization Today: survey of optimization methods Quasi-Newton Methods General form of quasi-newton methods: x k+1 = x k α
Numerical Optimization Professor Horst Cerjak, Horst Bischof, Thomas Pock Mat Vis-Gra SS09
 Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
Quasi-Newton Methods
 Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: Optimization
 Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
ISM206 Lecture Optimization of Nonlinear Objective with Linear Constraints
 ISM206 Lecture Optimization of Nonlinear Objective with Linear Constraints Instructor: Prof. Kevin Ross Scribe: Nitish John October 18, 2011 1 The Basic Goal The main idea is to transform a given constrained
ISM206 Lecture Optimization of Nonlinear Objective with Linear Constraints Instructor: Prof. Kevin Ross Scribe: Nitish John October 18, 2011 1 The Basic Goal The main idea is to transform a given constrained
Introduction to unconstrained optimization - direct search methods
 Introduction to unconstrained optimization - direct search methods Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi Structure of optimization methods Typically Constraint handling converts the
Introduction to unconstrained optimization - direct search methods Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi Structure of optimization methods Typically Constraint handling converts the
1 Numerical optimization
 Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
5 Handling Constraints
 5 Handling Constraints Engineering design optimization problems are very rarely unconstrained. Moreover, the constraints that appear in these problems are typically nonlinear. This motivates our interest
5 Handling Constraints Engineering design optimization problems are very rarely unconstrained. Moreover, the constraints that appear in these problems are typically nonlinear. This motivates our interest
Constrained Optimization
 1 / 22 Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University March 30, 2015 2 / 22 1. Equality constraints only 1.1 Reduced gradient 1.2 Lagrange
1 / 22 Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University March 30, 2015 2 / 22 1. Equality constraints only 1.1 Reduced gradient 1.2 Lagrange
Statistics 580 Optimization Methods
 Statistics 580 Optimization Methods Introduction Let fx be a given real-valued function on R p. The general optimization problem is to find an x ɛ R p at which fx attain a maximum or a minimum. It is of
Statistics 580 Optimization Methods Introduction Let fx be a given real-valued function on R p. The general optimization problem is to find an x ɛ R p at which fx attain a maximum or a minimum. It is of
Part 4: Active-set methods for linearly constrained optimization. Nick Gould (RAL)
") Part 4: Active-set methods for linearly constrained optimization Nick Gould RAL fx subject to Ax b Part C course on continuoue optimization LINEARLY CONSTRAINED MINIMIZATION fx subject to Ax { } b where
Part 4: Active-set methods for linearly constrained optimization Nick Gould RAL fx subject to Ax b Part C course on continuoue optimization LINEARLY CONSTRAINED MINIMIZATION fx subject to Ax { } b where
Gradient Descent. Dr. Xiaowei Huang
 Gradient Descent Dr. Xiaowei Huang https://cgi.csc.liv.ac.uk/~xiaowei/ Up to now, Three machine learning algorithms: decision tree learning k-nn linear regression only optimization objectives are discussed,
Gradient Descent Dr. Xiaowei Huang https://cgi.csc.liv.ac.uk/~xiaowei/ Up to now, Three machine learning algorithms: decision tree learning k-nn linear regression only optimization objectives are discussed,
Algorithms for Constrained Optimization
 1 / 42 Algorithms for Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University April 19, 2015 2 / 42 Outline 1. Convergence 2. Sequential quadratic
1 / 42 Algorithms for Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University April 19, 2015 2 / 42 Outline 1. Convergence 2. Sequential quadratic
Lecture Notes: Geometric Considerations in Unconstrained Optimization
 Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
Numerical Optimization. Review: Unconstrained Optimization
 Numerical Optimization Finding the best feasible solution Edward P. Gatzke Department of Chemical Engineering University of South Carolina Ed Gatzke (USC CHE ) Numerical Optimization ECHE 589, Spring 2011
Numerical Optimization Finding the best feasible solution Edward P. Gatzke Department of Chemical Engineering University of South Carolina Ed Gatzke (USC CHE ) Numerical Optimization ECHE 589, Spring 2011
Numerical Optimization of Partial Differential Equations
 Numerical Optimization of Partial Differential Equations Part I: basic optimization concepts in R n Bartosz Protas Department of Mathematics & Statistics McMaster University, Hamilton, Ontario, Canada
Numerical Optimization of Partial Differential Equations Part I: basic optimization concepts in R n Bartosz Protas Department of Mathematics & Statistics McMaster University, Hamilton, Ontario, Canada
Nonlinear Programming
 Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
1 Numerical optimization
 Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Optimization Methods for Circuit Design
 Technische Universität München Department of Electrical Engineering and Information Technology Institute for Electronic Design Automation Optimization Methods for Circuit Design Compendium H. Graeb Version
Technische Universität München Department of Electrical Engineering and Information Technology Institute for Electronic Design Automation Optimization Methods for Circuit Design Compendium H. Graeb Version
Constrained optimization. Unconstrained optimization. One-dimensional. Multi-dimensional. Newton with equality constraints. Active-set method.
 Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
Numerical Optimization: Basic Concepts and Algorithms
 May 27th 2015 Numerical Optimization: Basic Concepts and Algorithms R. Duvigneau R. Duvigneau - Numerical Optimization: Basic Concepts and Algorithms 1 Outline Some basic concepts in optimization Some
May 27th 2015 Numerical Optimization: Basic Concepts and Algorithms R. Duvigneau R. Duvigneau - Numerical Optimization: Basic Concepts and Algorithms 1 Outline Some basic concepts in optimization Some
CE 191: Civil and Environmental Engineering Systems Analysis. LEC 05 : Optimality Conditions
 CE 191: Civil and Environmental Engineering Systems Analysis LEC : Optimality Conditions Professor Scott Moura Civil & Environmental Engineering University of California, Berkeley Fall 214 Prof. Moura
CE 191: Civil and Environmental Engineering Systems Analysis LEC : Optimality Conditions Professor Scott Moura Civil & Environmental Engineering University of California, Berkeley Fall 214 Prof. Moura
Numerical optimization
 Numerical optimization Lecture 4 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 2 Longest Slowest Shortest Minimal Maximal
Numerical optimization Lecture 4 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 2 Longest Slowest Shortest Minimal Maximal
Lectures 9 and 10: Constrained optimization problems and their optimality conditions
 Lectures 9 and 10: Constrained optimization problems and their optimality conditions Coralia Cartis, Mathematical Institute, University of Oxford C6.2/B2: Continuous Optimization Lectures 9 and 10: Constrained
Lectures 9 and 10: Constrained optimization problems and their optimality conditions Coralia Cartis, Mathematical Institute, University of Oxford C6.2/B2: Continuous Optimization Lectures 9 and 10: Constrained
Outline. Scientific Computing: An Introductory Survey. Optimization. Optimization Problems. Examples: Optimization Problems
 Outline Scientific Computing: An Introductory Survey Chapter 6 Optimization 1 Prof. Michael. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Outline Scientific Computing: An Introductory Survey Chapter 6 Optimization 1 Prof. Michael. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Multivariate Newton Minimanization
 Multivariate Newton Minimanization Optymalizacja syntezy biosurfaktantu Rhamnolipid Rhamnolipids are naturally occuring glycolipid produced commercially by the Pseudomonas aeruginosa species of bacteria.
Multivariate Newton Minimanization Optymalizacja syntezy biosurfaktantu Rhamnolipid Rhamnolipids are naturally occuring glycolipid produced commercially by the Pseudomonas aeruginosa species of bacteria.
2.098/6.255/ Optimization Methods Practice True/False Questions
 2.098/6.255/15.093 Optimization Methods Practice True/False Questions December 11, 2009 Part I For each one of the statements below, state whether it is true or false. Include a 1-3 line supporting sentence
2.098/6.255/15.093 Optimization Methods Practice True/False Questions December 11, 2009 Part I For each one of the statements below, state whether it is true or false. Include a 1-3 line supporting sentence
Convex Optimization CMU-10725
 Convex Optimization CMU-10725 Quasi Newton Methods Barnabás Póczos & Ryan Tibshirani Quasi Newton Methods 2 Outline Modified Newton Method Rank one correction of the inverse Rank two correction of the
Convex Optimization CMU-10725 Quasi Newton Methods Barnabás Póczos & Ryan Tibshirani Quasi Newton Methods 2 Outline Modified Newton Method Rank one correction of the inverse Rank two correction of the
Performance Surfaces and Optimum Points
 CSC 302 1.5 Neural Networks Performance Surfaces and Optimum Points 1 Entrance Performance learning is another important class of learning law. Network parameters are adjusted to optimize the performance
CSC 302 1.5 Neural Networks Performance Surfaces and Optimum Points 1 Entrance Performance learning is another important class of learning law. Network parameters are adjusted to optimize the performance
Optimization II: Unconstrained Multivariable
 Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
Determination of Feasible Directions by Successive Quadratic Programming and Zoutendijk Algorithms: A Comparative Study
 International Journal of Mathematics And Its Applications Vol.2 No.4 (2014), pp.47-56. ISSN: 2347-1557(online) Determination of Feasible Directions by Successive Quadratic Programming and Zoutendijk Algorithms:
International Journal of Mathematics And Its Applications Vol.2 No.4 (2014), pp.47-56. ISSN: 2347-1557(online) Determination of Feasible Directions by Successive Quadratic Programming and Zoutendijk Algorithms:
Contents. Preface. 1 Introduction Optimization view on mathematical models NLP models, black-box versus explicit expression 3
 Contents Preface ix 1 Introduction 1 1.1 Optimization view on mathematical models 1 1.2 NLP models, black-box versus explicit expression 3 2 Mathematical modeling, cases 7 2.1 Introduction 7 2.2 Enclosing
Contents Preface ix 1 Introduction 1 1.1 Optimization view on mathematical models 1 1.2 NLP models, black-box versus explicit expression 3 2 Mathematical modeling, cases 7 2.1 Introduction 7 2.2 Enclosing
Practical Optimization: Basic Multidimensional Gradient Methods
 Practical Optimization: Basic Multidimensional Gradient Methods László Kozma Lkozma@cis.hut.fi Helsinki University of Technology S-88.4221 Postgraduate Seminar on Signal Processing 22. 10. 2008 Contents
Practical Optimization: Basic Multidimensional Gradient Methods László Kozma Lkozma@cis.hut.fi Helsinki University of Technology S-88.4221 Postgraduate Seminar on Signal Processing 22. 10. 2008 Contents
Written Examination
 Division of Scientific Computing Department of Information Technology Uppsala University Optimization Written Examination 202-2-20 Time: 4:00-9:00 Allowed Tools: Pocket Calculator, one A4 paper with notes
Division of Scientific Computing Department of Information Technology Uppsala University Optimization Written Examination 202-2-20 Time: 4:00-9:00 Allowed Tools: Pocket Calculator, one A4 paper with notes
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Unconstrained Multivariate Optimization
 Unconstrained Multivariate Optimization Multivariate optimization means optimization of a scalar function of a several variables: and has the general form: y = () min ( ) where () is a nonlinear scalar-valued
Unconstrained Multivariate Optimization Multivariate optimization means optimization of a scalar function of a several variables: and has the general form: y = () min ( ) where () is a nonlinear scalar-valued
Numerical optimization. Numerical optimization. Longest Shortest where Maximal Minimal. Fastest. Largest. Optimization problems
 1 Numerical optimization Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book Numerical optimization 048921 Advanced topics in vision Processing and Analysis of
1 Numerical optimization Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book Numerical optimization 048921 Advanced topics in vision Processing and Analysis of
Review of Classical Optimization
 Part II Review of Classical Optimization Multidisciplinary Design Optimization of Aircrafts 51 2 Deterministic Methods 2.1 One-Dimensional Unconstrained Minimization 2.1.1 Motivation Most practical optimization
Part II Review of Classical Optimization Multidisciplinary Design Optimization of Aircrafts 51 2 Deterministic Methods 2.1 One-Dimensional Unconstrained Minimization 2.1.1 Motivation Most practical optimization
Optimization. Escuela de Ingeniería Informática de Oviedo. (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30
 Numerical Computation Optimization 1 / 30") Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
Multidisciplinary System Design Optimization (MSDO)
") Multidisciplinary System Design Optimization (MSDO) Numerical Optimization II Lecture 8 Karen Willcox 1 Massachusetts Institute of Technology - Prof. de Weck and Prof. Willcox Today s Topics Sequential
Multidisciplinary System Design Optimization (MSDO) Numerical Optimization II Lecture 8 Karen Willcox 1 Massachusetts Institute of Technology - Prof. de Weck and Prof. Willcox Today s Topics Sequential
Optimization and Root Finding. Kurt Hornik
 Optimization and Root Finding Kurt Hornik Basics Root finding and unconstrained smooth optimization are closely related: Solving ƒ () = 0 can be accomplished via minimizing ƒ () 2 Slide 2 Basics Root finding
Optimization and Root Finding Kurt Hornik Basics Root finding and unconstrained smooth optimization are closely related: Solving ƒ () = 0 can be accomplished via minimizing ƒ () 2 Slide 2 Basics Root finding
(One Dimension) Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)
 Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)") Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
IE 5531: Engineering Optimization I
 IE 5531: Engineering Optimization I Lecture 19: Midterm 2 Review Prof. John Gunnar Carlsson November 22, 2010 Prof. John Gunnar Carlsson IE 5531: Engineering Optimization I November 22, 2010 1 / 34 Administrivia
IE 5531: Engineering Optimization I Lecture 19: Midterm 2 Review Prof. John Gunnar Carlsson November 22, 2010 Prof. John Gunnar Carlsson IE 5531: Engineering Optimization I November 22, 2010 1 / 34 Administrivia
Optimization II: Unconstrained Multivariable
 Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization II: Unconstrained
Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization II: Unconstrained
Optimization 2. CS5240 Theoretical Foundations in Multimedia. Leow Wee Kheng
 Optimization 2 CS5240 Theoretical Foundations in Multimedia Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (NUS) Optimization 2 1 / 38
Optimization 2 CS5240 Theoretical Foundations in Multimedia Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (NUS) Optimization 2 1 / 38
Numerical Optimization Techniques
 Numerical Optimization Techniques Léon Bottou NEC Labs America COS 424 3/2/2010 Today s Agenda Goals Representation Capacity Control Operational Considerations Computational Considerations Classification,
Numerical Optimization Techniques Léon Bottou NEC Labs America COS 424 3/2/2010 Today s Agenda Goals Representation Capacity Control Operational Considerations Computational Considerations Classification,
Static unconstrained optimization
 Static unconstrained optimization 2 In unconstrained optimization an objective function is minimized without any additional restriction on the decision variables, i.e. min f(x) x X ad (2.) with X ad R
Static unconstrained optimization 2 In unconstrained optimization an objective function is minimized without any additional restriction on the decision variables, i.e. min f(x) x X ad (2.) with X ad R
Computational Finance
 Department of Mathematics at University of California, San Diego Computational Finance Optimization Techniques [Lecture 2] Michael Holst January 9, 2017 Contents 1 Optimization Techniques 3 1.1 Examples
Department of Mathematics at University of California, San Diego Computational Finance Optimization Techniques [Lecture 2] Michael Holst January 9, 2017 Contents 1 Optimization Techniques 3 1.1 Examples
Line Search Methods for Unconstrained Optimisation
 Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Lecture 7 Unconstrained nonlinear programming
 Lecture 7 Unconstrained nonlinear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
Lecture 7 Unconstrained nonlinear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2. Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year
 MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2 1 Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 8 topics: quadratic optimisation, least squares,
MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2 1 Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 8 topics: quadratic optimisation, least squares,
Constrained optimization: direct methods (cont.)
") Constrained optimization: direct methods (cont.) Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi Direct methods Also known as methods of feasible directions Idea in a point x h, generate a
Constrained optimization: direct methods (cont.) Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi Direct methods Also known as methods of feasible directions Idea in a point x h, generate a
Lecture 7: Minimization or maximization of functions (Recipes Chapter 10)
") Lecture 7: Minimization or maximization of functions (Recipes Chapter 10) Actively studied subject for several reasons: Commonly encountered problem: e.g. Hamilton s and Lagrange s principles, economics
Lecture 7: Minimization or maximization of functions (Recipes Chapter 10) Actively studied subject for several reasons: Commonly encountered problem: e.g. Hamilton s and Lagrange s principles, economics
Optimality Conditions
 Chapter 2 Optimality Conditions 2.1 Global and Local Minima for Unconstrained Problems When a minimization problem does not have any constraints, the problem is to find the minimum of the objective function.
Chapter 2 Optimality Conditions 2.1 Global and Local Minima for Unconstrained Problems When a minimization problem does not have any constraints, the problem is to find the minimum of the objective function.
Chapter 4. Unconstrained optimization
 Chapter 4. Unconstrained optimization Version: 28-10-2012 Material: (for details see) Chapter 11 in [FKS] (pp.251-276) A reference e.g. L.11.2 refers to the corresponding Lemma in the book [FKS] PDF-file
Chapter 4. Unconstrained optimization Version: 28-10-2012 Material: (for details see) Chapter 11 in [FKS] (pp.251-276) A reference e.g. L.11.2 refers to the corresponding Lemma in the book [FKS] PDF-file
Higher-Order Methods
 Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Lecture 18: Optimization Programming
 Fall, 2016 Outline Unconstrained Optimization 1 Unconstrained Optimization 2 Equality-constrained Optimization Inequality-constrained Optimization Mixture-constrained Optimization 3 Quadratic Programming
Fall, 2016 Outline Unconstrained Optimization 1 Unconstrained Optimization 2 Equality-constrained Optimization Inequality-constrained Optimization Mixture-constrained Optimization 3 Quadratic Programming
Methods that avoid calculating the Hessian. Nonlinear Optimization; Steepest Descent, Quasi-Newton. Steepest Descent
 Nonlinear Optimization Steepest Descent and Niclas Börlin Department of Computing Science Umeå University niclas.borlin@cs.umu.se A disadvantage with the Newton method is that the Hessian has to be derived
Nonlinear Optimization Steepest Descent and Niclas Börlin Department of Computing Science Umeå University niclas.borlin@cs.umu.se A disadvantage with the Newton method is that the Hessian has to be derived
1 Computing with constraints
 Notes for 2017-04-26 1 Computing with constraints Recall that our basic problem is minimize φ(x) s.t. x Ω where the feasible set Ω is defined by equality and inequality conditions Ω = {x R n : c i (x)
Notes for 2017-04-26 1 Computing with constraints Recall that our basic problem is minimize φ(x) s.t. x Ω where the feasible set Ω is defined by equality and inequality conditions Ω = {x R n : c i (x)
nonrobust estimation The n measurement vectors taken together give the vector X R N. The unknown parameter vector is P R M.
 Introduction to nonlinear LS estimation R. I. Hartley and A. Zisserman: Multiple View Geometry in Computer Vision. Cambridge University Press, 2ed., 2004. After Chapter 5 and Appendix 6. We will use x
Introduction to nonlinear LS estimation R. I. Hartley and A. Zisserman: Multiple View Geometry in Computer Vision. Cambridge University Press, 2ed., 2004. After Chapter 5 and Appendix 6. We will use x
Quadratic Programming
 Quadratic Programming Outline Linearly constrained minimization Linear equality constraints Linear inequality constraints Quadratic objective function 2 SideBar: Matrix Spaces Four fundamental subspaces
Quadratic Programming Outline Linearly constrained minimization Linear equality constraints Linear inequality constraints Quadratic objective function 2 SideBar: Matrix Spaces Four fundamental subspaces
Conjugate Directions for Stochastic Gradient Descent
 Conjugate Directions for Stochastic Gradient Descent Nicol N Schraudolph Thore Graepel Institute of Computational Science ETH Zürich, Switzerland {schraudo,graepel}@infethzch Abstract The method of conjugate
Conjugate Directions for Stochastic Gradient Descent Nicol N Schraudolph Thore Graepel Institute of Computational Science ETH Zürich, Switzerland {schraudo,graepel}@infethzch Abstract The method of conjugate
8 Numerical methods for unconstrained problems
 8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
AM 205: lecture 18. Last time: optimization methods Today: conditions for optimality
 AM 205: lecture 18 Last time: optimization methods Today: conditions for optimality Existence of Global Minimum For example: f (x, y) = x 2 + y 2 is coercive on R 2 (global min. at (0, 0)) f (x) = x 3
AM 205: lecture 18 Last time: optimization methods Today: conditions for optimality Existence of Global Minimum For example: f (x, y) = x 2 + y 2 is coercive on R 2 (global min. at (0, 0)) f (x) = x 3
MS&E 318 (CME 338) Large-Scale Numerical Optimization
 Large-Scale Numerical Optimization") Stanford University, Management Science & Engineering (and ICME) MS&E 318 (CME 338) Large-Scale Numerical Optimization 1 Origins Instructor: Michael Saunders Spring 2015 Notes 9: Augmented Lagrangian Methods
Stanford University, Management Science & Engineering (and ICME) MS&E 318 (CME 338) Large-Scale Numerical Optimization 1 Origins Instructor: Michael Saunders Spring 2015 Notes 9: Augmented Lagrangian Methods
Newton s Method. Ryan Tibshirani Convex Optimization /36-725
 Newton s Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, Properties and examples: f (y) = max x
Newton s Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, Properties and examples: f (y) = max x
Exploring the energy landscape
 Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
MATH 4211/6211 Optimization Quasi-Newton Method
 MATH 4211/6211 Optimization Quasi-Newton Method Xiaojing Ye Department of Mathematics & Statistics Georgia State University Xiaojing Ye, Math & Stat, Georgia State University 0 Quasi-Newton Method Motivation:
MATH 4211/6211 Optimization Quasi-Newton Method Xiaojing Ye Department of Mathematics & Statistics Georgia State University Xiaojing Ye, Math & Stat, Georgia State University 0 Quasi-Newton Method Motivation:
Optimization. Totally not complete this is...don't use it yet...
 Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
Gradient-Based Optimization
 Multidisciplinary Design Optimization 48 Chapter 3 Gradient-Based Optimization 3. Introduction In Chapter we described methods to minimize (or at least decrease) a function of one variable. While problems
Multidisciplinary Design Optimization 48 Chapter 3 Gradient-Based Optimization 3. Introduction In Chapter we described methods to minimize (or at least decrease) a function of one variable. While problems
Mathematical optimization
 Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
Numerical Analysis of Electromagnetic Fields
 Pei-bai Zhou Numerical Analysis of Electromagnetic Fields With 157 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Part 1 Universal Concepts
Pei-bai Zhou Numerical Analysis of Electromagnetic Fields With 157 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Part 1 Universal Concepts
ECE580 Exam 1 October 4, Please do not write on the back of the exam pages. Extra paper is available from the instructor.
 ECE580 Exam 1 October 4, 2012 1 Name: Solution Score: /100 You must show ALL of your work for full credit. This exam is closed-book. Calculators may NOT be used. Please leave fractions as fractions, etc.
ECE580 Exam 1 October 4, 2012 1 Name: Solution Score: /100 You must show ALL of your work for full credit. This exam is closed-book. Calculators may NOT be used. Please leave fractions as fractions, etc.
Bindel, Spring 2017 Numerical Analysis (CS 4220) Notes for So far, we have considered unconstrained optimization problems.
 Notes for So far, we have considered unconstrained optimization problems.") Consider constraints Notes for 2017-04-24 So far, we have considered unconstrained optimization problems. The constrained problem is minimize φ(x) s.t. x Ω where Ω R n. We usually define x in terms of
Consider constraints Notes for 2017-04-24 So far, we have considered unconstrained optimization problems. The constrained problem is minimize φ(x) s.t. x Ω where Ω R n. We usually define x in terms of
Unconstrained optimization
 Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
On fast trust region methods for quadratic models with linear constraints. M.J.D. Powell
 DAMTP 2014/NA02 On fast trust region methods for quadratic models with linear constraints M.J.D. Powell Abstract: Quadratic models Q k (x), x R n, of the objective function F (x), x R n, are used by many
DAMTP 2014/NA02 On fast trust region methods for quadratic models with linear constraints M.J.D. Powell Abstract: Quadratic models Q k (x), x R n, of the objective function F (x), x R n, are used by many
5 Quasi-Newton Methods
 Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
Numerisches Rechnen. (für Informatiker) M. Grepl P. Esser & G. Welper & L. Zhang. Institut für Geometrie und Praktische Mathematik RWTH Aachen
 M. Grepl P. Esser & G. Welper & L. Zhang. Institut für Geometrie und Praktische Mathematik RWTH Aachen") Numerisches Rechnen (für Informatiker) M. Grepl P. Esser & G. Welper & L. Zhang Institut für Geometrie und Praktische Mathematik RWTH Aachen Wintersemester 2011/12 IGPM, RWTH Aachen Numerisches Rechnen
Numerisches Rechnen (für Informatiker) M. Grepl P. Esser & G. Welper & L. Zhang Institut für Geometrie und Praktische Mathematik RWTH Aachen Wintersemester 2011/12 IGPM, RWTH Aachen Numerisches Rechnen
CHAPTER 2: QUADRATIC PROGRAMMING
 CHAPTER 2: QUADRATIC PROGRAMMING Overview Quadratic programming (QP) problems are characterized by objective functions that are quadratic in the design variables, and linear constraints. In this sense,
CHAPTER 2: QUADRATIC PROGRAMMING Overview Quadratic programming (QP) problems are characterized by objective functions that are quadratic in the design variables, and linear constraints. In this sense,
ECS550NFB Introduction to Numerical Methods using Matlab Day 2
 ECS550NFB Introduction to Numerical Methods using Matlab Day 2 Lukas Laffers lukas.laffers@umb.sk Department of Mathematics, University of Matej Bel June 9, 2015 Today Root-finding: find x that solves
ECS550NFB Introduction to Numerical Methods using Matlab Day 2 Lukas Laffers lukas.laffers@umb.sk Department of Mathematics, University of Matej Bel June 9, 2015 Today Root-finding: find x that solves
Nonlinear Programming (Hillier, Lieberman Chapter 13) CHEM-E7155 Production Planning and Control
 CHEM-E7155 Production Planning and Control") Nonlinear Programming (Hillier, Lieberman Chapter 13) CHEM-E7155 Production Planning and Control 19/4/2012 Lecture content Problem formulation and sample examples (ch 13.1) Theoretical background Graphical
Nonlinear Programming (Hillier, Lieberman Chapter 13) CHEM-E7155 Production Planning and Control 19/4/2012 Lecture content Problem formulation and sample examples (ch 13.1) Theoretical background Graphical
A projected Hessian for full waveform inversion
 CWP-679 A projected Hessian for full waveform inversion Yong Ma & Dave Hale Center for Wave Phenomena, Colorado School of Mines, Golden, CO 80401, USA (c) Figure 1. Update directions for one iteration
CWP-679 A projected Hessian for full waveform inversion Yong Ma & Dave Hale Center for Wave Phenomena, Colorado School of Mines, Golden, CO 80401, USA (c) Figure 1. Update directions for one iteration
Geometry optimization
 Geometry optimization Trygve Helgaker Centre for Theoretical and Computational Chemistry Department of Chemistry, University of Oslo, Norway European Summer School in Quantum Chemistry (ESQC) 211 Torre
Geometry optimization Trygve Helgaker Centre for Theoretical and Computational Chemistry Department of Chemistry, University of Oslo, Norway European Summer School in Quantum Chemistry (ESQC) 211 Torre
Appendix A Taylor Approximations and Definite Matrices
 Appendix A Taylor Approximations and Definite Matrices Taylor approximations provide an easy way to approximate a function as a polynomial, using the derivatives of the function. We know, from elementary
Appendix A Taylor Approximations and Definite Matrices Taylor approximations provide an easy way to approximate a function as a polynomial, using the derivatives of the function. We know, from elementary
E5295/5B5749 Convex optimization with engineering applications. Lecture 8. Smooth convex unconstrained and equality-constrained minimization
 E5295/5B5749 Convex optimization with engineering applications Lecture 8 Smooth convex unconstrained and equality-constrained minimization A. Forsgren, KTH 1 Lecture 8 Convex optimization 2006/2007 Unconstrained
E5295/5B5749 Convex optimization with engineering applications Lecture 8 Smooth convex unconstrained and equality-constrained minimization A. Forsgren, KTH 1 Lecture 8 Convex optimization 2006/2007 Unconstrained
2. Quasi-Newton methods
 L. Vandenberghe EE236C (Spring 2016) 2. Quasi-Newton methods variable metric methods quasi-newton methods BFGS update limited-memory quasi-newton methods 2-1 Newton method for unconstrained minimization
L. Vandenberghe EE236C (Spring 2016) 2. Quasi-Newton methods variable metric methods quasi-newton methods BFGS update limited-memory quasi-newton methods 2-1 Newton method for unconstrained minimization
2.3 Linear Programming
 2.3 Linear Programming Linear Programming (LP) is the term used to define a wide range of optimization problems in which the objective function is linear in the unknown variables and the constraints are
2.3 Linear Programming Linear Programming (LP) is the term used to define a wide range of optimization problems in which the objective function is linear in the unknown variables and the constraints are
4TE3/6TE3. Algorithms for. Continuous Optimization
 4TE3/6TE3 Algorithms for Continuous Optimization (Algorithms for Constrained Nonlinear Optimization Problems) Tamás TERLAKY Computing and Software McMaster University Hamilton, November 2005 terlaky@mcmaster.ca
4TE3/6TE3 Algorithms for Continuous Optimization (Algorithms for Constrained Nonlinear Optimization Problems) Tamás TERLAKY Computing and Software McMaster University Hamilton, November 2005 terlaky@mcmaster.ca
arxiv: v1 [math.oc] 10 Apr 2017
![arxiv: v1 [math.oc] 10 Apr 2017](/thumbs/93/111917857.jpg "arxiv: v1 [math.oc] 10 Apr 2017") A Method to Guarantee Local Convergence for Sequential Quadratic Programming with Poor Hessian Approximation Tuan T. Nguyen, Mircea Lazar and Hans Butler arxiv:1704.03064v1 math.oc] 10 Apr 2017 Abstract
A Method to Guarantee Local Convergence for Sequential Quadratic Programming with Poor Hessian Approximation Tuan T. Nguyen, Mircea Lazar and Hans Butler arxiv:1704.03064v1 math.oc] 10 Apr 2017 Abstract
Convex Optimization. Problem set 2. Due Monday April 26th
 Convex Optimization Problem set 2 Due Monday April 26th 1 Gradient Decent without Line-search In this problem we will consider gradient descent with predetermined step sizes. That is, instead of determining
Convex Optimization Problem set 2 Due Monday April 26th 1 Gradient Decent without Line-search In this problem we will consider gradient descent with predetermined step sizes. That is, instead of determining