Multivariate Newton Minimanization
|
|
|
- Primrose French
- 5 years ago
- Views:
Transcription
1 Multivariate Newton Minimanization

2 Optymalizacja syntezy biosurfaktantu

3 Rhamnolipid Rhamnolipids are naturally occuring glycolipid produced commercially by the Pseudomonas aeruginosa species of bacteria. Application: They promote the uptake and biodegradation of poorly soluble substrates, They serve as immune modulators and virulence factors, They act as antimicrobials, They are used in surface motility, They are used to develope biofilm.
4 Rhamnolipid kinetics
5 Użyty został wariant 2 2 planowanego doświadczenia x 1 stężenie glicerolu x 2 stosunek wytłoków z trzciny cukrowej do nasion słonecznika x 1 x 2
6 y=46,25-2,35x1 6,18x2-15,8x12-14,92x22-9,74x1 x2

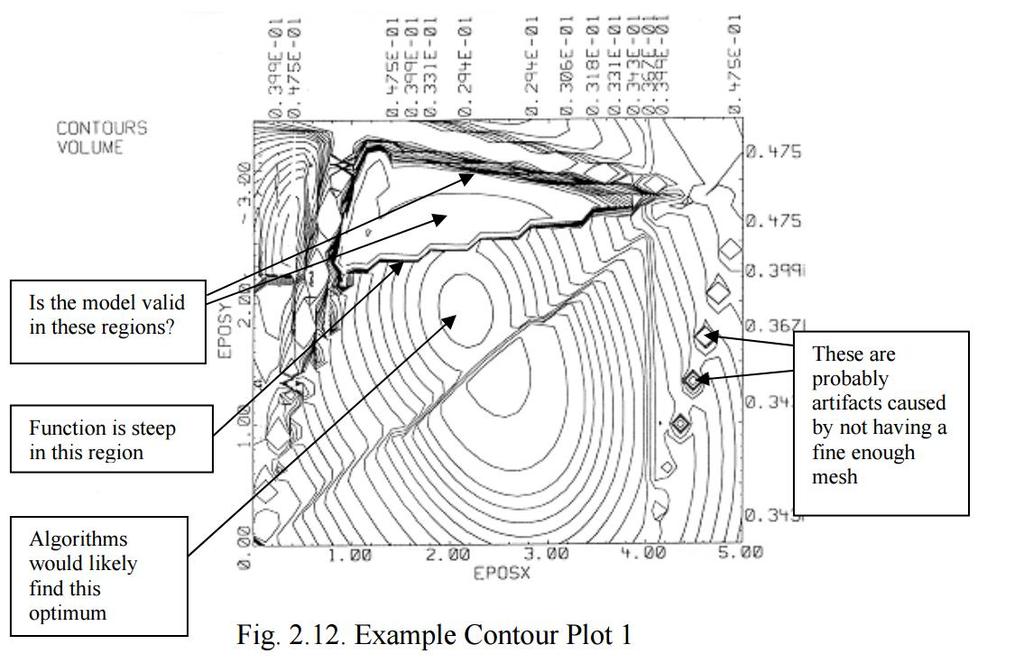
7 Surfaces (hipersurfaces) can have much more complex topology
 value of a given")
: Unconstrained")
8 Optimisation Process of finding maximum (minimum) value of a given finction in a specific region (constraints): Unconstrained Constrained.
9 Finding a root of the nonlinear equation Newton-Raphson method f(x) f(x 1 ) f (x 1 ) f x 1 0 x 2 x 1 x x 1 x 2 f x 1 = f x 1 0 x 1 x 2 = f x 1 x 1 x 2 x 2 = x 1 f x 1 f x 1
10 Finding a root of the nonlinear equation - Newton-Raphson method f(x) f(x 2 ) f (x 2 ) f x 2 0 x 3 x 2 x x 3 x 2 f x 2 = f x 2 0 x 3 x 2 = f x 2 x 3 x 2 x 3 = x 2 f x 2 f x 2
11 Finding a root of the nonlinear equation general expression f(x) f(x i ) f (x i ) f x i 0 x i+1 x i x x i+1 x i f x i = f x i 0 x i x i+1 = x i+1 = x i f x i f x i f x i x i x i+1
12 When do we stop? When nth change f(x)=0 or the change is small f(x) f(x i ) f (x i ) f x i 0 x i+1 x i x x i x i+1 x i+1 x i x i+1 100% = err Relative change
13 Example f x = x 2 1 f(x) Stopping cryterio < 30 % f(x i ) 1 1
14 Example f x = x 2 1 f(x) f 4 = 15 y = 8x Stopping cryterio < 30 % f x 1 = 2 4 = 8 f(x i ) 1 1 x 2 =? x 1 = 4 x f x = x 2 1 = 2x x i+1 = x i f x i f x i
15 Example f x = x 2 1 f(x) y = 8x f 4 = 15 Stopping cryterio < 30 % % = 46% f x 1 = 2 4 = 8 f(x i ) 1 1 x 2 =? x 1 = 4 x f x = x 2 1 = 2x x i+1 = x i f x i f x i i = 1, x 2 = x 1 f x 1 f = x = = 2.125
16 Example f x = x 2 1 f(x) y = 4.25x f(x i ) f x 2 = = f x = x 2 1 = 2x 1 x 3 =? x 2 = x i+1 = x i f x i f x i x i = 2, x 3 = x 2 f x 2 f = x = 1.28
17 Example f x = x 2 1 f(x) % = 66% f(x i ) f = 3.51 f 1 = 0.68 y = 4.25x f x 2 = = f x = x 2 1 = 2x 1 x 3 =? x 2 = x i+1 = x i f x i f x i x i = 2, x 3 = x 2 f x 2 f = x = 1.28
18 Example f x = x 2 1 f(x) f(x i ) y = 2.56x f x 3 = = f x = x 2 1 = 2x 1 x 3 = 1.28 x 4 =? x i+1 = x i f x i f x i x
19 Example f x = x 2 1 f(x) Finish! f 1 = % = 24% f(x i ) f = 3.51 y = 2.56x f x 3 = = f x = x 2 1 = 2x 1 x 3 = 1.28 x 4 =? x i+1 = x i f x i f x i x i = 3, x 4 = x 3 f x 3 f = x = 1.03
20 What about minima (maxima)? We have procedure to find zero of the function f(x) x i+1 = x i f x i f x i Where function f has its minima (maxima) f (x) = 0 So we are looking for the zero of the function g x = f (x) = 0 x i+1 = x i g x i g x i = x i f x i f x i
21 What about multidemensional problem? In order to explore topology of multidemensional surface we have to use again Taylors expansion series. Taylor expansion gives information about surrounding of the function (f x + Δx ) using ONLY LOCAL information about function: - f(x) it s value, - f (x) the rate of change of f in x, - f (x) it s curvature in x, - f (x) it s rate of change of curvature in x, - And so on. What is important that all the derivates are computed only in point x.
22
23 Accuracy using derivatives Trunctuation error resulting of final representation using TE f x + Δx = f x + df dx Δx + 1 d 2 f 2 dx 2 Δx2 + df dx = f x + Δx f x Δx 1 2 d 2 f dx 2 Δx + df dx f x + Δx f x Δx
24 Trunctuation error Trunctuation error resulting of final representation using TE ε T = 1 d 2 f Δx ~Δx 2 dx2
25 Accuracy using derivatives Round-off error resulting of final representation of numbers (lack of significant figures) f x + Δx = f x + df dx Δx + 1 d 2 f 2 dx 2 Δx2 + df dx = f x + Δx + ε f x + ε Δx 1 2 d 2 f dx 2 Δx + df dx f x + Δx f x Δx + 2 ε Δx
26 Round-off error Round-off error resulting of final representation of numbers (lack of significant figures) ε R = 2 ε Δx ~ 1 Δx ε total = 2 ε Δx 1 2 d 2 f dx 2 Δx
27 Examples of tructuation and round-off errors f x = x 3 + x 1 3 at point x = 3 True derivative value at point 3 is Δx = 0.01 df dx f x + Δx f x = f f 3 Δx 0.01 ε T = = df dx f x + Δx f x Δx f f = 2Δx 0.02 ε T = =
28 Examples of tructuation and round-off errors f x = x 3 + x 1 3 at point x = 3 True derivative value at point 3 is Δx = 0.01 f = f(3) = df dx f x + Δx f x = f f 3 Δx 0.01 ε total = = 27.4 Δx ε total
29 Total error Δx ε total
30 Taylor s expansion in 2D f x i+1, y i+1 = f x i, y i + f x Δx + f y Δy f x i+1, y i+1 = f x i, y i + f x, f y Δx Δy
31 Taylor s expansion in 2D of two functions f 1 x i+1, y i+1 = f 1 x i, y i + f 1 Δx + f x 1 Δy y f 1 x i+1, y i+1 = f 1 x i, y i + f Δx 1, f x 1 y Δy f 2 x i+1, y i+1 = f 2 x i, y i + f 2 Δx + f x 2 Δy y f 2 x i+1, y i+1 = f 2 x i, y i + f 2 x, f 2 y Δx Δy
32 Taylor s expansion in 2D of two functions f 1 x i+1, y i+1 = f 1 x i, y i + f Δx 1, f x 1 y Δy f 2 x i+1, y i+1 = f 2 x i, y i + f 2 x, f 2 y Δx Δy
33 Taylor s expansion in 2D of two functions f 1 x i+1, y i+1 = f 1 x i, y i + f Δx 1, f x 1 y Δy f 2 x i+1, y i+1 = f 2 x i, y i + f Δx 2, f x 2 y Δy f 1 x i+1, y i+1 f 2 x i+1, y i+1 = f 1 x i, y i f 2 x i, y i f 1x, f 1 y + f 2, f x 2 y Δx Δy
34 Taylor s expansion in 2D of two functions f 1 x i+1, y i+1 f 2 x i+1, y i+1 = f 1 x i, y i f 2 x i, y i f 1x, f 1 y + f 2, f x 2 y Δx Δy f x i+1 = f x i + J i Δ x f x i+1 = f x i + J i Δ x
35 Multivariate Taylor s expansion f x + Δ x = f x + J x Δ x Δ xt HΔ x +
36 Multivariate Taylor s expansion Multivariate vector function f x + Δ x = f x + J x Δ x Δ xt HΔ x + E.g. gravitational force F r = G Mm r 3 r
37 Multivariate Taylor s expansion Multivariate vector function f x + Δ x = f x + J x Δ x Δ xt HΔ x + E.g. gravitational force F r = G Mm r 3 r f x + Δ x = f x + T f( x)δ x Δ xt HΔ x +
38 Multivariate Taylor s expansion Multivariate vector function f x + Δ x = f x + J x Δ x Δ xt HΔ x + E.g. gravitational force F r = G Mm r 3 r Multivariate scalar function f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + E.g. energy, cost

δ energy, cost J x = f 1 f 1 x 1 x n f n f n x 1 x n f x = f x 1 f x n H x = 2")
39 Multivariate Taylor s expansion Multivariate vector function f x + Δ x = f x + J x Δ x Δ xt HΔ x + E.g. gravitational force F r = G Mm r 3 r Multivariate scalar function f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + E.g. energy, cost J x = f 1 f 1 x 1 x n f n f n x 1 x n f x = f x 1 f x n H x = 2 f f 2 x 1 x 1 x n f 2 f n x 1 x 2 n x n
40 Multivariate Taylor s expansion example f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + f: R 2 R 1 np. f x, y = x 2 + y 2 x = x y
41 Multivariate Taylor s expansion example f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + f: R 2 R 1 np. f x, y = x 2 + y 2 x = x y f x = f x 1 f x n f x = f x f y = 2x 2y
42 Multivariate Taylor s expansion example f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + f: R 2 R 1 np. f x, y = x 2 + y 2 x = x y f x = f x 1 f x n f x = f x f y = 2x 2y H x = 2 f x 2 f x y f x y 2 f y 2 =
43 Multivariate Taylor s expansion example f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + f: R 2 R 1 np. f x, y = x 2 + y 2 x = x y f x = f x 1 f x n f x = f x f y = 2x 2y H x = 2 f x 2 f x y f x y 2 f y 2 = f x + Δ x = f x + f x f y Δx Δy Δx Δy 2 f x 2 f x y f x y 2 f y 2 Δx Δy +
44 Multivariate Taylor s expansion example f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + f: R 2 R 1 np. f x, y = x 2 + y 2 x = x y f x = f x 1 f x n f x = f x f y = 2x 2y H x = 2 f x 2 f x y f x y 2 f y 2 = f x + Δ x = f x + f x f y Δx Δy Δx Δy 2 f x 2 f x y f x y 2 f y 2 Δx Δy + f x + Δ x = f Δx Δy x + 2x 2y Δx Δy Δx Δy +
45 Multivariate Taylor s expansion example f: R 2 R 1 np. f x, y = x 2 + y 2 x = x y f x + Δ x = f x + f x f y Δx Δy Δx Δy 2 f x 2 f x y f x y 2 f y 2 Δx Δy +
46 Multivariate Taylor s expansion example f: R 2 R 1 np. f x, y = x 2 + y 2 x = x y f x + Δ x = f x + f x f y Δx Δy Δx Δy 2 f x 2 f x y f x y 2 f y 2 Δx Δy + f x + Δ x = f x + 2x 2y Δx Δy Δx Δy Δx Δy +
47 Multivariate Taylor s expansion example f: R 2 R 1 np. f x, y = x 2 + y 2 x = x y f x + Δ x = f x + f x f y Δx Δy Δx Δy 2 f x 2 f x y f x y 2 f y 2 Δx Δy + f x + Δ x = f x + 2x 2y Δx Δy Δx Δy Δx Δy + f x + Δ x = f x + 2xΔx + 2yΔy + Δx 2 + Δy 2 f Δ x = f 0,0 = Δx 2 + Δy 2
48 Multivariate Taylor s expansion Gradient part f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + T f( x) = f x 1 f x n x = x 1 x n
49 Multivariate Taylor s expansion Gradient part f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + T f( x) = f f x 1 x n x = x 1 x n T f x x = f x 1 x 1 + f x 2 x f x n x n = n i=1 f x i x i = n i=1 f xi x i
50 Multivariate Taylor s expansion Gradient part f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + T f( x) = f f x 1 x n x = x 1 x n T f x x = f x 1 x 1 + f x 2 x f x n x n = n i=1 f x i x i = n i=1 f xi x i y T x = n i=1 y i x i
51 Multivariate Taylor s expansion Gradient part f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + T f( x) = f f x 1 x n x = x 1 x n T f x x = f x 1 x 1 + f x 2 x f x n x n = n i=1 f x i x i = n i=1 f xi x i y T x = n i=1 Plane tangential to function in point x Equation of plane ax 1 + bx 2 y i x i

52 Multivariate Taylor s expansion Gradient part f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + T f( x) = f f x 1 x n x = x 1 x n T f x x = f x 1 x 1 + f x 2 x f x n x n = n i=1 f x i x i = n i=1 f xi x i y T x = n i=1 Plane tangential to function in point x Equation of plane ax 1 + bx 2 y i x i Gradient gives information about the rate of change of f in each direction (x,y)
53 Gradient T f( x) = f x 1 f x n
54 Gradient T f( x) = f x 1 f x n
55 Gradient T f( x) = f f x 1 x n f( x)
56 Gradient T f( x) = f f x 1 x n f( x) f( x)
57 Gradient T f( x) = f f x 1 x n f( x) f( x) f( x)
58 Gradient T f( x) = f f x 1 x n f( x) f( x) - f( x) f( x) f( x)
 = f f x 1 x")
 f( x) f(")
59 Gradient T f( x) = f f x 1 x n f( x) f( x) f( x) f( x) f( x)
60 Gradient is a vector perpendicular to the function isoline T f( x) = f f x 1 x n f x = c f x(t) = c 0 = dc dt = df x t dt = f x t x 1 x 1 t t + f x t x 2 x 2 t t + + f x t x n x n t t = n f x t i=1 x i x i t t x 1 t 0 = dc n f x t dt = x i i=1 x i t t = f x t f x t x 1 x n t x n t t = T f x x (t)
61 Multivariate Taylor s expansion Hessian part f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + H x = 2 f 2 f 2 x 1 x 1 x n 2 f 2 f n x 1 x 2 n x n x = x 1 x n x T = x 1 x n
62 Multivariate Taylor s expansion - Hessian part f x + Δ x = f x + T f( x)δ x Δ xt HΔ x + H x = 2 f 2 f 2 x 1 x 1 x n 2 f 2 f n x 1 x 2 n x n x = x 1 x n x T = x 1 x n x T H x = x 1 x n 2 f 2 f 2 x 1 x 1 x n 2 f 2 f n x 1 x 2 n x n x 1 x n
63 H x = H 11 H 1n H n1 H nn x 1 x n
64 H x = H 11 H 1n H n1 H nn x 1 x n = H 11 x 1 + H 12 x H 1n x n H n1 x 1 + H n2 x H nn x n
65 n H x = H 11 H 1n H n1 H nn x 1 x n = H 11 x 1 + H 12 x H 1n x n H n1 x 1 + H n2 x H nn x n = j=1 n H 1j x j = n j=1 H 1j x j H nj x j H nj x j j=1
66 n H x = H 11 H 1n H n1 H nn x 1 x n = H 11 x 1 + H 12 x H 1n x n H n1 x 1 + H n2 x H nn x n = j=1 n H 1j x j = n j=1 H 1j x j H nj x j H nj x j j=1 x T H x = x 1 x n H 11 H 1n H n1 H nn x 1 x n
67 n H x = H 11 H 1n H n1 H nn x 1 x n = H 11 x 1 + H 12 x H 1n x n H n1 x 1 + H n2 x H nn x n = j=1 n H 1j x j = n j=1 H 1j x j H nj x j H nj x j j=1 x T H x = x 1 x n H 11 H 1n H n1 H nn x 1 x n = x 1 x n n j=1 H 1j x j H nj x j
68 n H x = H 11 H 1n H n1 H nn x 1 x n = H 11 x 1 + H 12 x H 1n x n H n1 x 1 + H n2 x H nn x n = j=1 n H 1j x j = n j=1 H 1j x j H nj x j H nj x j j=1 x T H x = x 1 x n H 11 H 1n H n1 H nn x 1 x n = x 1 x n n j=1 H 1j x j H nj x j = n j=1 x 1 x n H 1j x j H nj x j
69 n H x = H 11 H 1n H n1 H nn x 1 x n = H 11 x 1 + H 12 x H 1n x n H n1 x 1 + H n2 x H nn x n = j=1 n H 1j x j = n j=1 H 1j x j H nj x j H nj x j j=1 x T H x = x 1 x n H 11 H 1n H n1 H nn x 1 x n = x 1 x n n j=1 H 1j x j H nj x j = n j=1 x 1 x n H 1j x j H nj x j x T H x = n j=1 x 1 x n H 1j x j H nj x j
70 n H x = H 11 H 1n H n1 H nn x 1 x n = H 11 x 1 + H 12 x H 1n x n H n1 x 1 + H n2 x H nn x n = j=1 n H 1j x j = n j=1 H 1j x j H nj x j H nj x j j=1 x T H x = x 1 x n H 11 H 1n H n1 H nn x 1 x n = x 1 x n n j=1 H 1j x j H nj x j = n j=1 x 1 x n H 1j x j H nj x j x T H x = n j=1 x 1 x n H 1j x j H nj x j = n j=1 H 1j x j x 1 + H 1j x j x H 1j x j x n = n n i=1 j=1 H ij x i x j
71 Hessian containts all information about the shape of the function around minima f x + Δ x = f x + T f x Δ x Δ xt HΔ x + f x + Δ x = f x Δ xt HΔ x +
72 Recall quadratic function f x = ax 2 a > 0 a = f (x) > 0 1 dimensional Hessian
73 Recall quadratic function f x = ax 2 a = 0 a = f x = 0 1 dimensional Hessian
74 Recall quadratic function f x = ax 2 a < 0 a = f x < 0 1 dimensional Hessian


75 Recall quadratic function f x = ax 2 + by 2 H = 2 f x 2 f x y f x y 2 f y 2 a 0 0 b Defines shape of a skeleton function of the resulting surface
76 How to detect minimum (unconstrained)? 1. Necessary condition for uncostrained optimum at point x : f x = 0 and f( x) is differentiable at x 2. Sufficient condition for uncostrained optimum at point x: f x = 0 and f( x) is differentiable at x and 2 f( x ) is positive definite
77 Positive and negative defined matrix If for every vector x the following is true for a symmetric matrix H: x T H x > 0 then H is positive definite x T H x < 0 then H is negative definite Very cumbersome definition one needs to check every vector x
78 Positive and negative defined matrix Symmetric matrix H is positive definite if: 1. All eigenvalues are positive. 2. The determinant of each of its principal minor matrices are positive. Symmetric matrix H is negative definite if: 1. All eigenvalues are negative. 2. If we reverse the sign of each matrix s elements and the determinant of each of its principal minor matrices are positive.
79 Example H f x = = 2 > 0 = 4 16 = 12 < 0

80 Nature of stationary points Hessian H positive definite: Quadratic form Eigenvalues y T Hy 0 0 i y T T M M y T My My My 2 0 Local nature: minimum

81 Nature of stationary points (2) Hessian H negative definite: Quadratic form Eigenvalues Local nature: maximum y T Hy 0 0 i




82 Nature of stationary points (3) Hessian H indefinite: Quadratic form Eigenvalues y T Hy 0 0 i Local nature: saddle point


83 Nature of stationary points (4) Hessian H positive semi-definite: Quadratic form Eigenvalues y T Hy 0 0 i H singular! Local nature: valley


84 Nature of stationary points (5) Hessian H negative semi-definite: Quadratic form Eigenvalues y T Hy 0 0 i H singular! Local nature: ridge






85 Stationary point nature summary y T Hy i Definiteness H Nature x* 0 Positive d. Minimum 0 0 Positive semi-d. Indefinite Valley Saddlepoint 0 0 Negative semi-d. Negative d. Ridge Maximum
86 Newton method for optimization 1D Recall Newton method for finding a root of the function f (f x = 0?) x i+1 = x i f x i f x i Function f has minima (maximum) if f x = 0 Let g x = f x = 0 x i+1 = x i g x i g x i = x i f x i f x i
87 Newton method 1D different perspective Taylor expansion Newton method in fact is again application of Taylor expansion. It answer the question: How far should I jump to reach minimum namely point where f x i+1 = 0? That question can be unswered by expanding the function in the initial point x i : f x i + x = f x i + f x i x f x 2 + Now we want to move by Δx so we will reach minimum namely df x i + x = 0 dx So 0 = df x i + x = d dx dx f x i + f x i x f x 2 +
88 Newton method 1D different perspective Taylor expansion 0 = df x i + x dx = d dx f x i + f x i x f x = f x i + f x + We take (for computational simplicty) only first term with x. Recall from the previous equation it comes from quadratic term. 0 = f x i + f x Because x = x i+1 x i 0 = f x i + f x i+1 x i x i+1 = x i f x i f x i
89 In Newton method we travel along parabola. Why? Because its the first polynomial that has minima indicator f(x) f x i f x i + Δx f x i f x i+1 = x i + Δx x i+1 x i x
90 For second degree polynomial it is a one step method. f x = x 2 1 f(x) f x i f x i + Δx f x i x i+1 x i x f x i+1 = x i + Δx x i+1 = x i f x i f x i
91 For second degree polynomial it is a one step method. f x = x 2 1 f(x) f x i f x i + Δx f x i x i+1 x i x f x i+1 = x i + Δx x i+1 = x i f x i f x i = x i 2x i 2
92 For second degree polynomial it is a one step method. f x = x 2 1 f(x) f x i f x i + Δx f x i x i+1 x i x f x i+1 = x i + Δx x i+1 = x i f x i f x i = x i 2x i 2
93 For second degree polynomial it is a one step method. f x = x 2 1 f(x) f x i f x i + Δx f x i x i+1 x i x f x i+1 = x i + Δx x i+1 = x i f x i f x i = x i 2x i 2 = x i x i = 0
94 Multivariate Newton method for optimization Again How far should I jump to reach minimum namely point so f x i+1 = 0. f x i+1 = f x i + T f x i ( x i+1 x i ) x i+1 x T i H( x i+1 x i ) f x = b f x = 0 Δ x f x i+1 = Δ x f x i + T f x i ( x i+1 x i ) x i+1 x T i H( x i+1 x i ) f x = b T x f x = b f x = x T A x f x = A T x + A x Δ x f x i+1 = f x i HT ( x i+1 x i ) H( x i+1 x i ) H T = H Δ x f x i+1 = f x i + H( x i+1 x i )
95 We look for x where f x = 0 so.. 0 = Δ x f x i+1 = f x i + H( x i+1 x i ) 0 = f x i + H( x i+1 x i ) f x i = H( x i+1 x i ) x i+1 = x i H 1 ( x i ) f x i
96 Multivariate optimisation Newton method Pros: Converges fast (especially for quadratic functions) Uses both information about shape (gradient) and curvature (Hessian). Cons: High compuational cost (Hessian, inverse) Hessian may be singular, Computational errors.
97 Steepest descent Easy idea let s move towards steepest descent namely along f Question is how far should we go? r = f x x We go along straight line (vector). Question is how far should we go? x 1 = x 0 α f x 0 = x 0 + α r 0
98 Steepest descent Starting point x 0 Easy idea let s move towards steepest descent namely along f r = f x x Final point x 1 r = f x 0
99 Steepest descent Starting point x 0 Easy idea let s move towards steepest descent namely along f r = f x x Final point x 1 r = f x 0 We go along straight line (vector). Question is how far should we go? x 1 = x 0 α f x 0 = x 0 + α r 0
100 Steepest descent Starting point x 0 Easy idea let s move towards steepest descent namely along f r = f x x Final point x 1 r = f x 0 We go along straight line (vector). Question is how far should we go? x 1 = x 0 α f x 0 = x 0 + α r 0 How much should be α? We go until we reach minimum along x 1 direction.
101 Steepest descent Starting point x 0 Easy idea let s move towards steepest descent namely along f r = f x x Final point x 1 r = f x 0 We go along straight line (vector). Question is how far should we go? x 1 = x 0 α f x 0 = x 0 + α r 0 How much should be α? f x 1 ( x) We go until we reach minimum along x 1 direction. α
102 Directional derivative We go until we reach minimum along x 1 direction. So we need To calculate derivative over α along x 1. df x dα = df x α dα = df dx 1 dx 1 dα + df dx 2 dx 2 dα + + df n dx n df dx n dα = dx i dx i dα i=1 df x dα n = i=1 df dx i dx i dα = T f d x dα
103 Steepest descent f x 1 Starting point x 0 Easy idea let s move towards steepest descent namely along f Question is how far should we go? r = f x x. Final point x 1 r 0 = f x 0 x 1 = x 0 α f x 0 = x 0 + α r 0 df x 1 dα = T f x 1 d x 1 dα = T f x 1 d dα x 0 + α r 0 = T f x 1 r 0 df x 1 dα = 0 T f x 1 r 0 = 0 r 1 T r 0 = 0 We go until gradient is perpendicular to the gradient in initial point.
104 Steepest descent f x 1 Starting point x 0 Easy idea let s move towards steepest descent namely along f Question is how far should we go? r = f x x. Final point x 1 f x 0 x 1 = x 0 α f x 0 = x 0 + α r 0 df x 1 dα = T f x 1 d x 1 dα = T f x 1 d dα x 0 + α r 0 = T f x 1 r 0 df x 1 dα = 0 T f x 1 r 0 = 0 r 1 T r 0 = 0 We go until gradient is perpendicular to the gradient in initial point. And then start again
105 How to find it computationally? r 1 T r 0 = 0 f x i+1 = f x i + T f x i ( x i+1 x i ) x i+1 x T i H( x i+1 x i ) f x 1 = f x 0 + T f x 0 ( x 1 x 0 ) x 1 x T 0 H( x 1 x 0 ) f x 1 = T f x 0 + H( x 1 x 0 ) 0 = f x 1 = T f x 0 + H( x 1 x 0 )
106 How to find it computationally? f x 1 = T f x 0 + H( x 1 x 0 ) r 1 = T f x 0 + H( x 1 x 0 ) r 1 = T f x 0 + Hα r 0 r 1 T r 0 = 0 T f x 0 + Hα r T 0 r 0 = 0
107 How to find it computationally? T f x 0 + Hα r T 0 r 0 = 0 f x 0 r 0 + α r T 0 H T r 0 = 0 f x 0 r 0 + α r T 0 H r 0 = 0 α = f r T 0 H x 0 r 0 r 0
108 Steepest descent routine ex f x = x 2 + y 2 1. Choose an initial point say x 0 = Choose accuracy ε say Compute gradient at this point r 0 = f x 0 = 2x 2y = Compute optimal α along r 0 : - compute Hessian at x 0 = 2 2, H = , - compute r 0 T r 0 = = 8 - compute r T 0 H r 0 = compute α = r 0 T r 0 = 8 = 1 r T 0 H r = Compute next point x 1 = x 0 α r 0 = = Compute f x = f 0 = 0. If f x ε finish else go to 2. 0
109 Steepest descent method Pros: Always goes downhill Always converges Simple implementation Cons: Slow on eccentric functions
110 Steepest descent method eccentric function example Theorem If we define the error function in the objective function at current value x as: There hold at every step k Where A largest eigenvalue of H a smallest eigenvalue of H E E x = 1 2 x x k+1 x T H( x x ) A a A + a 2 E x k




111 Steepest descent method eccentric function example For function f x = x 2 + y 2 H = A = 2, a = 2 E x k E xk = 0 direct method For function f x = 50x 2 + y 2 H = A = 50, a = 2 E x k E x k slow convergence
112 Solution? combined methods Recall that function around minimum is quadratic f x + Δx = f x + df(x) dx Δx d 2 f x dx 2 Δx2 + But if in f(x) there is a minimum so df(x) dx = 0 and f x + Δx f x + aδx 2 So around minimum Newton method should work really well. Combined method (so called quasi-newton methods) start with steepest descent and transform into Newton method once it reaches near minimum region.
113 Improvements Computing Hessian is very costfull not metioning inverse: BFGS (Broyden-Fletcher-Goldfarb-Shanno), Conjugate gradients, DFP (Davidon-Fletcher-Powell).
Optimization: Nonlinear Optimization without Constraints. Nonlinear Optimization without Constraints 1 / 23
 Optimization: Nonlinear Optimization without Constraints Nonlinear Optimization without Constraints 1 / 23 Nonlinear optimization without constraints Unconstrained minimization min x f(x) where f(x) is
Optimization: Nonlinear Optimization without Constraints Nonlinear Optimization without Constraints 1 / 23 Nonlinear optimization without constraints Unconstrained minimization min x f(x) where f(x) is
NonlinearOptimization
 1/35 NonlinearOptimization Pavel Kordík Department of Computer Systems Faculty of Information Technology Czech Technical University in Prague Jiří Kašpar, Pavel Tvrdík, 2011 Unconstrained nonlinear optimization,
1/35 NonlinearOptimization Pavel Kordík Department of Computer Systems Faculty of Information Technology Czech Technical University in Prague Jiří Kašpar, Pavel Tvrdík, 2011 Unconstrained nonlinear optimization,
Nonlinear Optimization: What s important?
 Nonlinear Optimization: What s important? Julian Hall 10th May 2012 Convexity: convex problems A local minimizer is a global minimizer A solution of f (x) = 0 (stationary point) is a minimizer A global
Nonlinear Optimization: What s important? Julian Hall 10th May 2012 Convexity: convex problems A local minimizer is a global minimizer A solution of f (x) = 0 (stationary point) is a minimizer A global
Optimization Methods
 Optimization Methods Decision making Examples: determining which ingredients and in what quantities to add to a mixture being made so that it will meet specifications on its composition allocating available
Optimization Methods Decision making Examples: determining which ingredients and in what quantities to add to a mixture being made so that it will meet specifications on its composition allocating available
Quasi-Newton Methods
 Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Nonlinear Programming
 Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
Optimization II: Unconstrained Multivariable
 Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
Chapter 4. Unconstrained optimization
 Chapter 4. Unconstrained optimization Version: 28-10-2012 Material: (for details see) Chapter 11 in [FKS] (pp.251-276) A reference e.g. L.11.2 refers to the corresponding Lemma in the book [FKS] PDF-file
Chapter 4. Unconstrained optimization Version: 28-10-2012 Material: (for details see) Chapter 11 in [FKS] (pp.251-276) A reference e.g. L.11.2 refers to the corresponding Lemma in the book [FKS] PDF-file
Gradient Descent. Dr. Xiaowei Huang
 Gradient Descent Dr. Xiaowei Huang https://cgi.csc.liv.ac.uk/~xiaowei/ Up to now, Three machine learning algorithms: decision tree learning k-nn linear regression only optimization objectives are discussed,
Gradient Descent Dr. Xiaowei Huang https://cgi.csc.liv.ac.uk/~xiaowei/ Up to now, Three machine learning algorithms: decision tree learning k-nn linear regression only optimization objectives are discussed,
1 Numerical optimization
 Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
MATH 4211/6211 Optimization Quasi-Newton Method
 MATH 4211/6211 Optimization Quasi-Newton Method Xiaojing Ye Department of Mathematics & Statistics Georgia State University Xiaojing Ye, Math & Stat, Georgia State University 0 Quasi-Newton Method Motivation:
MATH 4211/6211 Optimization Quasi-Newton Method Xiaojing Ye Department of Mathematics & Statistics Georgia State University Xiaojing Ye, Math & Stat, Georgia State University 0 Quasi-Newton Method Motivation:
Convex Optimization CMU-10725
 Convex Optimization CMU-10725 Quasi Newton Methods Barnabás Póczos & Ryan Tibshirani Quasi Newton Methods 2 Outline Modified Newton Method Rank one correction of the inverse Rank two correction of the
Convex Optimization CMU-10725 Quasi Newton Methods Barnabás Póczos & Ryan Tibshirani Quasi Newton Methods 2 Outline Modified Newton Method Rank one correction of the inverse Rank two correction of the
Comparative study of Optimization methods for Unconstrained Multivariable Nonlinear Programming Problems
 International Journal of Scientific and Research Publications, Volume 3, Issue 10, October 013 1 ISSN 50-3153 Comparative study of Optimization methods for Unconstrained Multivariable Nonlinear Programming
International Journal of Scientific and Research Publications, Volume 3, Issue 10, October 013 1 ISSN 50-3153 Comparative study of Optimization methods for Unconstrained Multivariable Nonlinear Programming
CE 191: Civil and Environmental Engineering Systems Analysis. LEC 05 : Optimality Conditions
 CE 191: Civil and Environmental Engineering Systems Analysis LEC : Optimality Conditions Professor Scott Moura Civil & Environmental Engineering University of California, Berkeley Fall 214 Prof. Moura
CE 191: Civil and Environmental Engineering Systems Analysis LEC : Optimality Conditions Professor Scott Moura Civil & Environmental Engineering University of California, Berkeley Fall 214 Prof. Moura
Unconstrained Multivariate Optimization
 Unconstrained Multivariate Optimization Multivariate optimization means optimization of a scalar function of a several variables: and has the general form: y = () min ( ) where () is a nonlinear scalar-valued
Unconstrained Multivariate Optimization Multivariate optimization means optimization of a scalar function of a several variables: and has the general form: y = () min ( ) where () is a nonlinear scalar-valued
Convex Optimization. Problem set 2. Due Monday April 26th
 Convex Optimization Problem set 2 Due Monday April 26th 1 Gradient Decent without Line-search In this problem we will consider gradient descent with predetermined step sizes. That is, instead of determining
Convex Optimization Problem set 2 Due Monday April 26th 1 Gradient Decent without Line-search In this problem we will consider gradient descent with predetermined step sizes. That is, instead of determining
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
Math (P)refresher Lecture 8: Unconstrained Optimization
refresher Lecture 8: Unconstrained Optimization") Math (P)refresher Lecture 8: Unconstrained Optimization September 2006 Today s Topics : Quadratic Forms Definiteness of Quadratic Forms Maxima and Minima in R n First Order Conditions Second Order Conditions
Math (P)refresher Lecture 8: Unconstrained Optimization September 2006 Today s Topics : Quadratic Forms Definiteness of Quadratic Forms Maxima and Minima in R n First Order Conditions Second Order Conditions
Shiqian Ma, MAT-258A: Numerical Optimization 1. Chapter 3. Gradient Method
 Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 3 Gradient Method Shiqian Ma, MAT-258A: Numerical Optimization 2 3.1. Gradient method Classical gradient method: to minimize a differentiable convex
Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 3 Gradient Method Shiqian Ma, MAT-258A: Numerical Optimization 2 3.1. Gradient method Classical gradient method: to minimize a differentiable convex
Exploring the energy landscape
 Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
Statistics 580 Optimization Methods
 Statistics 580 Optimization Methods Introduction Let fx be a given real-valued function on R p. The general optimization problem is to find an x ɛ R p at which fx attain a maximum or a minimum. It is of
Statistics 580 Optimization Methods Introduction Let fx be a given real-valued function on R p. The general optimization problem is to find an x ɛ R p at which fx attain a maximum or a minimum. It is of
Optimization II: Unconstrained Multivariable
 Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization II: Unconstrained
Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization II: Unconstrained
Introduction to gradient descent
 6-1: Introduction to gradient descent Prof. J.C. Kao, UCLA Introduction to gradient descent Derivation and intuitions Hessian 6-2: Introduction to gradient descent Prof. J.C. Kao, UCLA Introduction Our
6-1: Introduction to gradient descent Prof. J.C. Kao, UCLA Introduction to gradient descent Derivation and intuitions Hessian 6-2: Introduction to gradient descent Prof. J.C. Kao, UCLA Introduction Our
Functions of Several Variables
 Functions of Several Variables The Unconstrained Minimization Problem where In n dimensions the unconstrained problem is stated as f() x variables. minimize f()x x, is a scalar objective function of vector
Functions of Several Variables The Unconstrained Minimization Problem where In n dimensions the unconstrained problem is stated as f() x variables. minimize f()x x, is a scalar objective function of vector
Unconstrained optimization
 Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
1 Numerical optimization
 Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Lecture V. Numerical Optimization
 Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
Numerical Optimization
 Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
Unconstrained Optimization
 1 / 36 Unconstrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University February 2, 2015 2 / 36 3 / 36 4 / 36 5 / 36 1. preliminaries 1.1 local approximation
1 / 36 Unconstrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University February 2, 2015 2 / 36 3 / 36 4 / 36 5 / 36 1. preliminaries 1.1 local approximation
Methods that avoid calculating the Hessian. Nonlinear Optimization; Steepest Descent, Quasi-Newton. Steepest Descent
 Nonlinear Optimization Steepest Descent and Niclas Börlin Department of Computing Science Umeå University niclas.borlin@cs.umu.se A disadvantage with the Newton method is that the Hessian has to be derived
Nonlinear Optimization Steepest Descent and Niclas Börlin Department of Computing Science Umeå University niclas.borlin@cs.umu.se A disadvantage with the Newton method is that the Hessian has to be derived
Lecture 7 Unconstrained nonlinear programming
 Lecture 7 Unconstrained nonlinear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
Lecture 7 Unconstrained nonlinear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
Gradient-Based Optimization
 Multidisciplinary Design Optimization 48 Chapter 3 Gradient-Based Optimization 3. Introduction In Chapter we described methods to minimize (or at least decrease) a function of one variable. While problems
Multidisciplinary Design Optimization 48 Chapter 3 Gradient-Based Optimization 3. Introduction In Chapter we described methods to minimize (or at least decrease) a function of one variable. While problems
Optimization and Root Finding. Kurt Hornik
 Optimization and Root Finding Kurt Hornik Basics Root finding and unconstrained smooth optimization are closely related: Solving ƒ () = 0 can be accomplished via minimizing ƒ () 2 Slide 2 Basics Root finding
Optimization and Root Finding Kurt Hornik Basics Root finding and unconstrained smooth optimization are closely related: Solving ƒ () = 0 can be accomplished via minimizing ƒ () 2 Slide 2 Basics Root finding
Lecture Notes: Geometric Considerations in Unconstrained Optimization
 Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2. Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year
 MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2 1 Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 8 topics: quadratic optimisation, least squares,
MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2 1 Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 8 topics: quadratic optimisation, least squares,
, b = 0. (2) 1 2 The eigenvectors of A corresponding to the eigenvalues λ 1 = 1, λ 2 = 3 are
 1 2 The eigenvectors of A corresponding to the eigenvalues λ 1 = 1, λ 2 = 3 are") Quadratic forms We consider the quadratic function f : R 2 R defined by f(x) = 2 xt Ax b T x with x = (x, x 2 ) T, () where A R 2 2 is symmetric and b R 2. We will see that, depending on the eigenvalues
Quadratic forms We consider the quadratic function f : R 2 R defined by f(x) = 2 xt Ax b T x with x = (x, x 2 ) T, () where A R 2 2 is symmetric and b R 2. We will see that, depending on the eigenvalues
5 Quasi-Newton Methods
 Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
Performance Surfaces and Optimum Points
 CSC 302 1.5 Neural Networks Performance Surfaces and Optimum Points 1 Entrance Performance learning is another important class of learning law. Network parameters are adjusted to optimize the performance
CSC 302 1.5 Neural Networks Performance Surfaces and Optimum Points 1 Entrance Performance learning is another important class of learning law. Network parameters are adjusted to optimize the performance
Higher-Order Methods
 Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Review of Classical Optimization
 Part II Review of Classical Optimization Multidisciplinary Design Optimization of Aircrafts 51 2 Deterministic Methods 2.1 One-Dimensional Unconstrained Minimization 2.1.1 Motivation Most practical optimization
Part II Review of Classical Optimization Multidisciplinary Design Optimization of Aircrafts 51 2 Deterministic Methods 2.1 One-Dimensional Unconstrained Minimization 2.1.1 Motivation Most practical optimization
Static unconstrained optimization
 Static unconstrained optimization 2 In unconstrained optimization an objective function is minimized without any additional restriction on the decision variables, i.e. min f(x) x X ad (2.) with X ad R
Static unconstrained optimization 2 In unconstrained optimization an objective function is minimized without any additional restriction on the decision variables, i.e. min f(x) x X ad (2.) with X ad R
Optimization Methods
 Optimization Methods Categorization of Optimization Problems Continuous Optimization Discrete Optimization Combinatorial Optimization Variational Optimization Common Optimization Concepts in Computer Vision
Optimization Methods Categorization of Optimization Problems Continuous Optimization Discrete Optimization Combinatorial Optimization Variational Optimization Common Optimization Concepts in Computer Vision
Mathematical optimization
 Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
Newton s Method. Ryan Tibshirani Convex Optimization /36-725
 Newton s Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, Properties and examples: f (y) = max x
Newton s Method Ryan Tibshirani Convex Optimization 10-725/36-725 1 Last time: dual correspondences Given a function f : R n R, we define its conjugate f : R n R, Properties and examples: f (y) = max x
Lecture 14: October 17
 1-725/36-725: Convex Optimization Fall 218 Lecture 14: October 17 Lecturer: Lecturer: Ryan Tibshirani Scribes: Pengsheng Guo, Xian Zhou Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
1-725/36-725: Convex Optimization Fall 218 Lecture 14: October 17 Lecturer: Lecturer: Ryan Tibshirani Scribes: Pengsheng Guo, Xian Zhou Note: LaTeX template courtesy of UC Berkeley EECS dept. Disclaimer:
Optimization. Escuela de Ingeniería Informática de Oviedo. (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30
 Numerical Computation Optimization 1 / 30") Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
Quasi-Newton methods: Symmetric rank 1 (SR1) Broyden Fletcher Goldfarb Shanno February 6, / 25 (BFG. Limited memory BFGS (L-BFGS)
 Broyden Fletcher Goldfarb Shanno February 6, / 25 (BFG. Limited memory BFGS (L-BFGS)") Quasi-Newton methods: Symmetric rank 1 (SR1) Broyden Fletcher Goldfarb Shanno (BFGS) Limited memory BFGS (L-BFGS) February 6, 2014 Quasi-Newton methods: Symmetric rank 1 (SR1) Broyden Fletcher Goldfarb
Quasi-Newton methods: Symmetric rank 1 (SR1) Broyden Fletcher Goldfarb Shanno (BFGS) Limited memory BFGS (L-BFGS) February 6, 2014 Quasi-Newton methods: Symmetric rank 1 (SR1) Broyden Fletcher Goldfarb
Vasil Khalidov & Miles Hansard. C.M. Bishop s PRML: Chapter 5; Neural Networks
 C.M. Bishop s PRML: Chapter 5; Neural Networks Introduction The aim is, as before, to find useful decompositions of the target variable; t(x) = y(x, w) + ɛ(x) (3.7) t(x n ) and x n are the observations,
C.M. Bishop s PRML: Chapter 5; Neural Networks Introduction The aim is, as before, to find useful decompositions of the target variable; t(x) = y(x, w) + ɛ(x) (3.7) t(x n ) and x n are the observations,
(One Dimension) Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)
 Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)") Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
Krzysztof Tesch. Continuous optimisation algorithms
 Krzysztof Tesch Continuous optimisation algorithms Gdańsk 16 GDAŃSK UNIVERSITY OF TECHNOLOGY PUBLISHERS CHAIRMAN OF EDITORIAL BOARD Janusz T. Cieśliński REVIEWER Krzysztof Kosowski COVER DESIGN Katarzyna
Krzysztof Tesch Continuous optimisation algorithms Gdańsk 16 GDAŃSK UNIVERSITY OF TECHNOLOGY PUBLISHERS CHAIRMAN OF EDITORIAL BOARD Janusz T. Cieśliński REVIEWER Krzysztof Kosowski COVER DESIGN Katarzyna
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
Scientific Computing: Optimization
 Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
2. Quasi-Newton methods
 L. Vandenberghe EE236C (Spring 2016) 2. Quasi-Newton methods variable metric methods quasi-newton methods BFGS update limited-memory quasi-newton methods 2-1 Newton method for unconstrained minimization
L. Vandenberghe EE236C (Spring 2016) 2. Quasi-Newton methods variable metric methods quasi-newton methods BFGS update limited-memory quasi-newton methods 2-1 Newton method for unconstrained minimization
1 Newton s Method. Suppose we want to solve: x R. At x = x, f (x) can be approximated by:
 can be approximated by:") Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
Nonlinear Optimization
 Nonlinear Optimization (Com S 477/577 Notes) Yan-Bin Jia Nov 7, 2017 1 Introduction Given a single function f that depends on one or more independent variable, we want to find the values of those variables
Nonlinear Optimization (Com S 477/577 Notes) Yan-Bin Jia Nov 7, 2017 1 Introduction Given a single function f that depends on one or more independent variable, we want to find the values of those variables
Introduction to Unconstrained Optimization: Part 2
 Introduction to Unconstrained Optimization: Part 2 James Allison ME 555 January 29, 2007 Overview Recap Recap selected concepts from last time (with examples) Use of quadratic functions Tests for positive
Introduction to Unconstrained Optimization: Part 2 James Allison ME 555 January 29, 2007 Overview Recap Recap selected concepts from last time (with examples) Use of quadratic functions Tests for positive
Chapter 9 Global Nonlinear Techniques
 Chapter 9 Global Nonlinear Techniques Consider nonlinear dynamical system 0 Nullcline X 0 = F (X) = B @ f 1 (X) f 2 (X). f n (X) x j nullcline = fx : f j (X) = 0g equilibrium solutions = intersection of
Chapter 9 Global Nonlinear Techniques Consider nonlinear dynamical system 0 Nullcline X 0 = F (X) = B @ f 1 (X) f 2 (X). f n (X) x j nullcline = fx : f j (X) = 0g equilibrium solutions = intersection of
Minimization of Static! Cost Functions!
 Minimization of Static Cost Functions Robert Stengel Optimal Control and Estimation, MAE 546, Princeton University, 2017 J = Static cost function with constant control parameter vector, u Conditions for
Minimization of Static Cost Functions Robert Stengel Optimal Control and Estimation, MAE 546, Princeton University, 2017 J = Static cost function with constant control parameter vector, u Conditions for
Numerical Optimization Professor Horst Cerjak, Horst Bischof, Thomas Pock Mat Vis-Gra SS09
 Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
Practical Optimization: Basic Multidimensional Gradient Methods
 Practical Optimization: Basic Multidimensional Gradient Methods László Kozma Lkozma@cis.hut.fi Helsinki University of Technology S-88.4221 Postgraduate Seminar on Signal Processing 22. 10. 2008 Contents
Practical Optimization: Basic Multidimensional Gradient Methods László Kozma Lkozma@cis.hut.fi Helsinki University of Technology S-88.4221 Postgraduate Seminar on Signal Processing 22. 10. 2008 Contents
Numerical Optimization: Basic Concepts and Algorithms
 May 27th 2015 Numerical Optimization: Basic Concepts and Algorithms R. Duvigneau R. Duvigneau - Numerical Optimization: Basic Concepts and Algorithms 1 Outline Some basic concepts in optimization Some
May 27th 2015 Numerical Optimization: Basic Concepts and Algorithms R. Duvigneau R. Duvigneau - Numerical Optimization: Basic Concepts and Algorithms 1 Outline Some basic concepts in optimization Some
Geometry optimization
 Geometry optimization Trygve Helgaker Centre for Theoretical and Computational Chemistry Department of Chemistry, University of Oslo, Norway European Summer School in Quantum Chemistry (ESQC) 211 Torre
Geometry optimization Trygve Helgaker Centre for Theoretical and Computational Chemistry Department of Chemistry, University of Oslo, Norway European Summer School in Quantum Chemistry (ESQC) 211 Torre
Constrained optimization. Unconstrained optimization. One-dimensional. Multi-dimensional. Newton with equality constraints. Active-set method.
 Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
Algorithms for Constrained Optimization
 1 / 42 Algorithms for Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University April 19, 2015 2 / 42 Outline 1. Convergence 2. Sequential quadratic
1 / 42 Algorithms for Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University April 19, 2015 2 / 42 Outline 1. Convergence 2. Sequential quadratic
Introduction to Nonlinear Optimization Paul J. Atzberger
 Introduction to Nonlinear Optimization Paul J. Atzberger Comments should be sent to: atzberg@math.ucsb.edu Introduction We shall discuss in these notes a brief introduction to nonlinear optimization concepts,
Introduction to Nonlinear Optimization Paul J. Atzberger Comments should be sent to: atzberg@math.ucsb.edu Introduction We shall discuss in these notes a brief introduction to nonlinear optimization concepts,
Gradient Descent. Sargur Srihari
 Gradient Descent Sargur srihari@cedar.buffalo.edu 1 Topics Simple Gradient Descent/Ascent Difficulties with Simple Gradient Descent Line Search Brent s Method Conjugate Gradient Descent Weight vectors
Gradient Descent Sargur srihari@cedar.buffalo.edu 1 Topics Simple Gradient Descent/Ascent Difficulties with Simple Gradient Descent Line Search Brent s Method Conjugate Gradient Descent Weight vectors
CHAPTER 2: QUADRATIC PROGRAMMING
 CHAPTER 2: QUADRATIC PROGRAMMING Overview Quadratic programming (QP) problems are characterized by objective functions that are quadratic in the design variables, and linear constraints. In this sense,
CHAPTER 2: QUADRATIC PROGRAMMING Overview Quadratic programming (QP) problems are characterized by objective functions that are quadratic in the design variables, and linear constraints. In this sense,
14. Nonlinear equations
 L. Vandenberghe ECE133A (Winter 2018) 14. Nonlinear equations Newton method for nonlinear equations damped Newton method for unconstrained minimization Newton method for nonlinear least squares 14-1 Set
L. Vandenberghe ECE133A (Winter 2018) 14. Nonlinear equations Newton method for nonlinear equations damped Newton method for unconstrained minimization Newton method for nonlinear least squares 14-1 Set
Improving the Convergence of Back-Propogation Learning with Second Order Methods
 the of Back-Propogation Learning with Second Order Methods Sue Becker and Yann le Cun, Sept 1988 Kasey Bray, October 2017 Table of Contents 1 with Back-Propagation 2 the of BP 3 A Computationally Feasible
the of Back-Propogation Learning with Second Order Methods Sue Becker and Yann le Cun, Sept 1988 Kasey Bray, October 2017 Table of Contents 1 with Back-Propagation 2 the of BP 3 A Computationally Feasible
Optimization. Totally not complete this is...don't use it yet...
 Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
AM 205: lecture 18. Last time: optimization methods Today: conditions for optimality
 AM 205: lecture 18 Last time: optimization methods Today: conditions for optimality Existence of Global Minimum For example: f (x, y) = x 2 + y 2 is coercive on R 2 (global min. at (0, 0)) f (x) = x 3
AM 205: lecture 18 Last time: optimization methods Today: conditions for optimality Existence of Global Minimum For example: f (x, y) = x 2 + y 2 is coercive on R 2 (global min. at (0, 0)) f (x) = x 3
UNCONSTRAINED OPTIMIZATION
 UNCONSTRAINED OPTIMIZATION 6. MATHEMATICAL BASIS Given a function f : R n R, and x R n such that f(x ) < f(x) for all x R n then x is called a minimizer of f and f(x ) is the minimum(value) of f. We wish
UNCONSTRAINED OPTIMIZATION 6. MATHEMATICAL BASIS Given a function f : R n R, and x R n such that f(x ) < f(x) for all x R n then x is called a minimizer of f and f(x ) is the minimum(value) of f. We wish
Methods for Unconstrained Optimization Numerical Optimization Lectures 1-2
 Methods for Unconstrained Optimization Numerical Optimization Lectures 1-2 Coralia Cartis, University of Oxford INFOMM CDT: Modelling, Analysis and Computation of Continuous Real-World Problems Methods
Methods for Unconstrained Optimization Numerical Optimization Lectures 1-2 Coralia Cartis, University of Oxford INFOMM CDT: Modelling, Analysis and Computation of Continuous Real-World Problems Methods
Numerical solutions of nonlinear systems of equations
 Numerical solutions of nonlinear systems of equations Tsung-Ming Huang Department of Mathematics National Taiwan Normal University, Taiwan E-mail: min@math.ntnu.edu.tw August 28, 2011 Outline 1 Fixed points
Numerical solutions of nonlinear systems of equations Tsung-Ming Huang Department of Mathematics National Taiwan Normal University, Taiwan E-mail: min@math.ntnu.edu.tw August 28, 2011 Outline 1 Fixed points
AM 205: lecture 19. Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods
 AM 205: lecture 19 Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods Optimality Conditions: Equality Constrained Case As another example of equality
AM 205: lecture 19 Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods Optimality Conditions: Equality Constrained Case As another example of equality
Determination of Feasible Directions by Successive Quadratic Programming and Zoutendijk Algorithms: A Comparative Study
 International Journal of Mathematics And Its Applications Vol.2 No.4 (2014), pp.47-56. ISSN: 2347-1557(online) Determination of Feasible Directions by Successive Quadratic Programming and Zoutendijk Algorithms:
International Journal of Mathematics And Its Applications Vol.2 No.4 (2014), pp.47-56. ISSN: 2347-1557(online) Determination of Feasible Directions by Successive Quadratic Programming and Zoutendijk Algorithms:
The Steepest Descent Algorithm for Unconstrained Optimization
 The Steepest Descent Algorithm for Unconstrained Optimization Robert M. Freund February, 2014 c 2014 Massachusetts Institute of Technology. All rights reserved. 1 1 Steepest Descent Algorithm The problem
The Steepest Descent Algorithm for Unconstrained Optimization Robert M. Freund February, 2014 c 2014 Massachusetts Institute of Technology. All rights reserved. 1 1 Steepest Descent Algorithm The problem
Part 4: IIR Filters Optimization Approach. Tutorial ISCAS 2007
 Part 4: IIR Filters Optimization Approach Tutorial ISCAS 2007 Copyright 2007 Andreas Antoniou Victoria, BC, Canada Email: aantoniou@ieee.org July 24, 2007 Frame # 1 Slide # 1 A. Antoniou Part4: IIR Filters
Part 4: IIR Filters Optimization Approach Tutorial ISCAS 2007 Copyright 2007 Andreas Antoniou Victoria, BC, Canada Email: aantoniou@ieee.org July 24, 2007 Frame # 1 Slide # 1 A. Antoniou Part4: IIR Filters
Root Finding (and Optimisation)
") Root Finding (and Optimisation) M.Sc. in Mathematical Modelling & Scientific Computing, Practical Numerical Analysis Michaelmas Term 2018, Lecture 4 Root Finding The idea of root finding is simple we want
Root Finding (and Optimisation) M.Sc. in Mathematical Modelling & Scientific Computing, Practical Numerical Analysis Michaelmas Term 2018, Lecture 4 Root Finding The idea of root finding is simple we want
Data Mining (Mineria de Dades)
") Data Mining (Mineria de Dades) Lluís A. Belanche belanche@lsi.upc.edu Soft Computing Research Group Dept. de Llenguatges i Sistemes Informàtics (Software department) Universitat Politècnica de Catalunya
Data Mining (Mineria de Dades) Lluís A. Belanche belanche@lsi.upc.edu Soft Computing Research Group Dept. de Llenguatges i Sistemes Informàtics (Software department) Universitat Politècnica de Catalunya
Positive Definite Matrix
 1/29 Chia-Ping Chen Professor Department of Computer Science and Engineering National Sun Yat-sen University Linear Algebra Positive Definite, Negative Definite, Indefinite 2/29 Pure Quadratic Function
1/29 Chia-Ping Chen Professor Department of Computer Science and Engineering National Sun Yat-sen University Linear Algebra Positive Definite, Negative Definite, Indefinite 2/29 Pure Quadratic Function
NONLINEAR. (Hillier & Lieberman Introduction to Operations Research, 8 th edition)
") NONLINEAR PROGRAMMING (Hillier & Lieberman Introduction to Operations Research, 8 th edition) Nonlinear Programming g Linear programming has a fundamental role in OR. In linear programming all its functions
NONLINEAR PROGRAMMING (Hillier & Lieberman Introduction to Operations Research, 8 th edition) Nonlinear Programming g Linear programming has a fundamental role in OR. In linear programming all its functions
ECS550NFB Introduction to Numerical Methods using Matlab Day 2
 ECS550NFB Introduction to Numerical Methods using Matlab Day 2 Lukas Laffers lukas.laffers@umb.sk Department of Mathematics, University of Matej Bel June 9, 2015 Today Root-finding: find x that solves
ECS550NFB Introduction to Numerical Methods using Matlab Day 2 Lukas Laffers lukas.laffers@umb.sk Department of Mathematics, University of Matej Bel June 9, 2015 Today Root-finding: find x that solves
Lecture 5: September 12
 10-725/36-725: Convex Optimization Fall 2015 Lecture 5: September 12 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Barun Patra and Tyler Vuong Note: LaTeX template courtesy of UC Berkeley EECS
10-725/36-725: Convex Optimization Fall 2015 Lecture 5: September 12 Lecturer: Lecturer: Ryan Tibshirani Scribes: Scribes: Barun Patra and Tyler Vuong Note: LaTeX template courtesy of UC Berkeley EECS
Numerisches Rechnen. (für Informatiker) M. Grepl P. Esser & G. Welper & L. Zhang. Institut für Geometrie und Praktische Mathematik RWTH Aachen
 M. Grepl P. Esser & G. Welper & L. Zhang. Institut für Geometrie und Praktische Mathematik RWTH Aachen") Numerisches Rechnen (für Informatiker) M. Grepl P. Esser & G. Welper & L. Zhang Institut für Geometrie und Praktische Mathematik RWTH Aachen Wintersemester 2011/12 IGPM, RWTH Aachen Numerisches Rechnen
Numerisches Rechnen (für Informatiker) M. Grepl P. Esser & G. Welper & L. Zhang Institut für Geometrie und Praktische Mathematik RWTH Aachen Wintersemester 2011/12 IGPM, RWTH Aachen Numerisches Rechnen
Optimality Conditions
 Chapter 2 Optimality Conditions 2.1 Global and Local Minima for Unconstrained Problems When a minimization problem does not have any constraints, the problem is to find the minimum of the objective function.
Chapter 2 Optimality Conditions 2.1 Global and Local Minima for Unconstrained Problems When a minimization problem does not have any constraints, the problem is to find the minimum of the objective function.
Chapter III. Unconstrained Univariate Optimization
 1 Chapter III Unconstrained Univariate Optimization Introduction Interval Elimination Methods Polynomial Approximation Methods Newton s Method Quasi-Newton Methods 1 INTRODUCTION 2 1 Introduction Univariate
1 Chapter III Unconstrained Univariate Optimization Introduction Interval Elimination Methods Polynomial Approximation Methods Newton s Method Quasi-Newton Methods 1 INTRODUCTION 2 1 Introduction Univariate
September Math Course: First Order Derivative
 September Math Course: First Order Derivative Arina Nikandrova Functions Function y = f (x), where x is either be a scalar or a vector of several variables (x,..., x n ), can be thought of as a rule which
September Math Course: First Order Derivative Arina Nikandrova Functions Function y = f (x), where x is either be a scalar or a vector of several variables (x,..., x n ), can be thought of as a rule which
Tangent spaces, normals and extrema
 Chapter 3 Tangent spaces, normals and extrema If S is a surface in 3-space, with a point a S where S looks smooth, i.e., without any fold or cusp or self-crossing, we can intuitively define the tangent
Chapter 3 Tangent spaces, normals and extrema If S is a surface in 3-space, with a point a S where S looks smooth, i.e., without any fold or cusp or self-crossing, we can intuitively define the tangent
17 Solution of Nonlinear Systems
 17 Solution of Nonlinear Systems We now discuss the solution of systems of nonlinear equations. An important ingredient will be the multivariate Taylor theorem. Theorem 17.1 Let D = {x 1, x 2,..., x m
17 Solution of Nonlinear Systems We now discuss the solution of systems of nonlinear equations. An important ingredient will be the multivariate Taylor theorem. Theorem 17.1 Let D = {x 1, x 2,..., x m
Optimization. Next: Curve Fitting Up: Numerical Analysis for Chemical Previous: Linear Algebraic and Equations. Subsections
 Next: Curve Fitting Up: Numerical Analysis for Chemical Previous: Linear Algebraic and Equations Subsections One-dimensional Unconstrained Optimization Golden-Section Search Quadratic Interpolation Newton's
Next: Curve Fitting Up: Numerical Analysis for Chemical Previous: Linear Algebraic and Equations Subsections One-dimensional Unconstrained Optimization Golden-Section Search Quadratic Interpolation Newton's
5 Handling Constraints
 5 Handling Constraints Engineering design optimization problems are very rarely unconstrained. Moreover, the constraints that appear in these problems are typically nonlinear. This motivates our interest
5 Handling Constraints Engineering design optimization problems are very rarely unconstrained. Moreover, the constraints that appear in these problems are typically nonlinear. This motivates our interest
Lecture 2 - Unconstrained Optimization Definition[Global Minimum and Maximum]Let f : S R be defined on a set S R n. Then
![Lecture 2 - Unconstrained Optimization Definition[Global Minimum and Maximum]Let f : S R be defined on a set S R n. Then](/thumbs/86/93291808.jpg "Lecture 2 - Unconstrained Optimization Definition[Global Minimum and Maximum]Let f : S R be defined on a set S R n. Then") Lecture 2 - Unconstrained Optimization Definition[Global Minimum and Maximum]Let f : S R be defined on a set S R n. Then 1. x S is a global minimum point of f over S if f (x) f (x ) for any x S. 2. x S
Lecture 2 - Unconstrained Optimization Definition[Global Minimum and Maximum]Let f : S R be defined on a set S R n. Then 1. x S is a global minimum point of f over S if f (x) f (x ) for any x S. 2. x S
Matrix Derivatives and Descent Optimization Methods
 Matrix Derivatives and Descent Optimization Methods 1 Qiang Ning Department of Electrical and Computer Engineering Beckman Institute for Advanced Science and Techonology University of Illinois at Urbana-Champaign
Matrix Derivatives and Descent Optimization Methods 1 Qiang Ning Department of Electrical and Computer Engineering Beckman Institute for Advanced Science and Techonology University of Illinois at Urbana-Champaign
g(t) = f(x 1 (t),..., x n (t)).
 = f(x 1 (t),..., x n (t)).") Reading: [Simon] p. 313-333, 833-836. 0.1 The Chain Rule Partial derivatives describe how a function changes in directions parallel to the coordinate axes. Now we shall demonstrate how the partial derivatives
Reading: [Simon] p. 313-333, 833-836. 0.1 The Chain Rule Partial derivatives describe how a function changes in directions parallel to the coordinate axes. Now we shall demonstrate how the partial derivatives
REVIEW OF DIFFERENTIAL CALCULUS
 REVIEW OF DIFFERENTIAL CALCULUS DONU ARAPURA 1. Limits and continuity To simplify the statements, we will often stick to two variables, but everything holds with any number of variables. Let f(x, y) be
REVIEW OF DIFFERENTIAL CALCULUS DONU ARAPURA 1. Limits and continuity To simplify the statements, we will often stick to two variables, but everything holds with any number of variables. Let f(x, y) be
Introduction to unconstrained optimization - direct search methods
 Introduction to unconstrained optimization - direct search methods Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi Structure of optimization methods Typically Constraint handling converts the
Introduction to unconstrained optimization - direct search methods Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi Structure of optimization methods Typically Constraint handling converts the
Optimisation in Higher Dimensions
 CHAPTER 6 Optimisation in Higher Dimensions Beyond optimisation in 1D, we will study two directions. First, the equivalent in nth dimension, x R n such that f(x ) f(x) for all x R n. Second, constrained
CHAPTER 6 Optimisation in Higher Dimensions Beyond optimisation in 1D, we will study two directions. First, the equivalent in nth dimension, x R n such that f(x ) f(x) for all x R n. Second, constrained
Deep Learning. Authors: I. Goodfellow, Y. Bengio, A. Courville. Chapter 4: Numerical Computation. Lecture slides edited by C. Yim. C.
 Chapter 4: Numerical Computation Deep Learning Authors: I. Goodfellow, Y. Bengio, A. Courville Lecture slides edited by 1 Chapter 4: Numerical Computation 4.1 Overflow and Underflow 4.2 Poor Conditioning
Chapter 4: Numerical Computation Deep Learning Authors: I. Goodfellow, Y. Bengio, A. Courville Lecture slides edited by 1 Chapter 4: Numerical Computation 4.1 Overflow and Underflow 4.2 Poor Conditioning