EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
|
|
|
- Laureen McKinney
- 5 years ago
- Views:
Transcription
1 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science
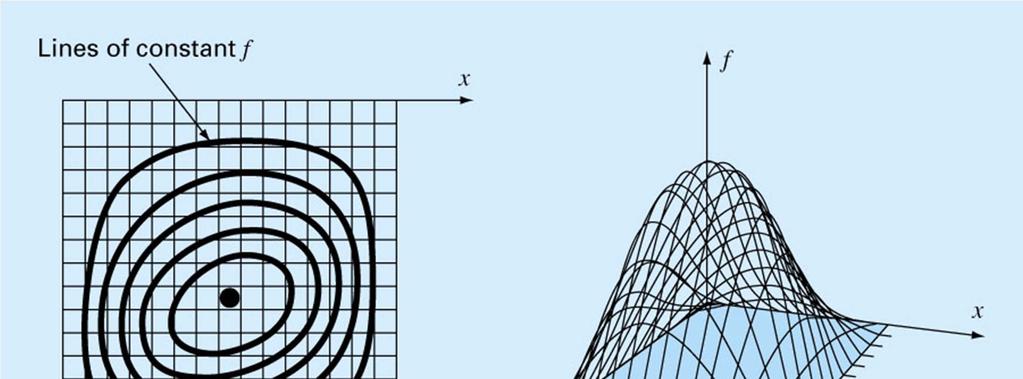
2 Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one variable f(x 1, x 2,, x n ) We want to find the values of x 1, x 2,, x n that give f() the largest (or smallest) possible value Graphical solution is not possible, but a graphical picture helps understanding Hilltops and contour maps

3
4 Methods of solution Direct or non-gradient methods do not require derivatives Grid search Random search One variable at a time Line searches and Powell s method Simplex optimization
5 Gradient methods use first and possibly second derivatives Gradient is the vector of first partials Hessian is the matrix of second partials Steepest ascent/descent Conjugate gradient Newton s method Quasi-Newton methods
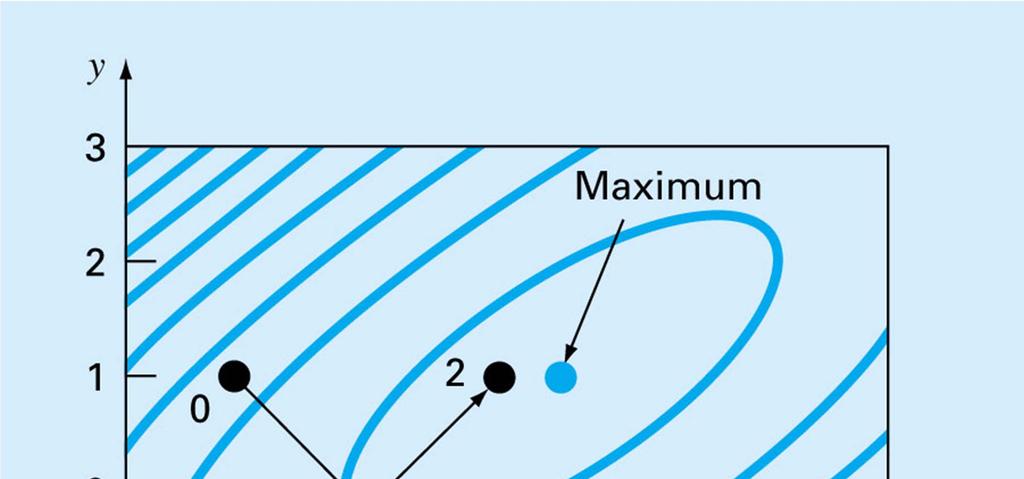
6 Grid and Random Search Given a function and limits on each variable, generate a set of random points in the domain, and eventually choose the one with the largest function value Alternatively, divide the interval on each variable into small segments and check the function for all possible combinations
 x x 2x")
 1.25 1 2")
7 f( x, x ) x x 2x 2x x x 2 x 2 1 x 3 f( 1,1.5)
8 Direct Search with 10,000 Points Method x 1 x 2 f E Random Random Random Random Random Random Random Random Grid
9 Features of Random and Grid Search Slow and inefficient Requires knowledge of domain Works even for discontinuous functions Poor in high dimension Grid search can be used iteratively, with progressively narrowing domains
10 Line searches Given a starting point and a direction, search for the maximum, or for a good next point, in that direction. Equivalent to one dimensional optimization, so can use Newton s method or another method from previous chapter Different methods use different directions
11 x v ( x, x,, x ) 1 2 ( v, v,, v ) 1 2 n n f ( x) f( x, x,, x ) 1 2 g( λ) f ( x λv) n
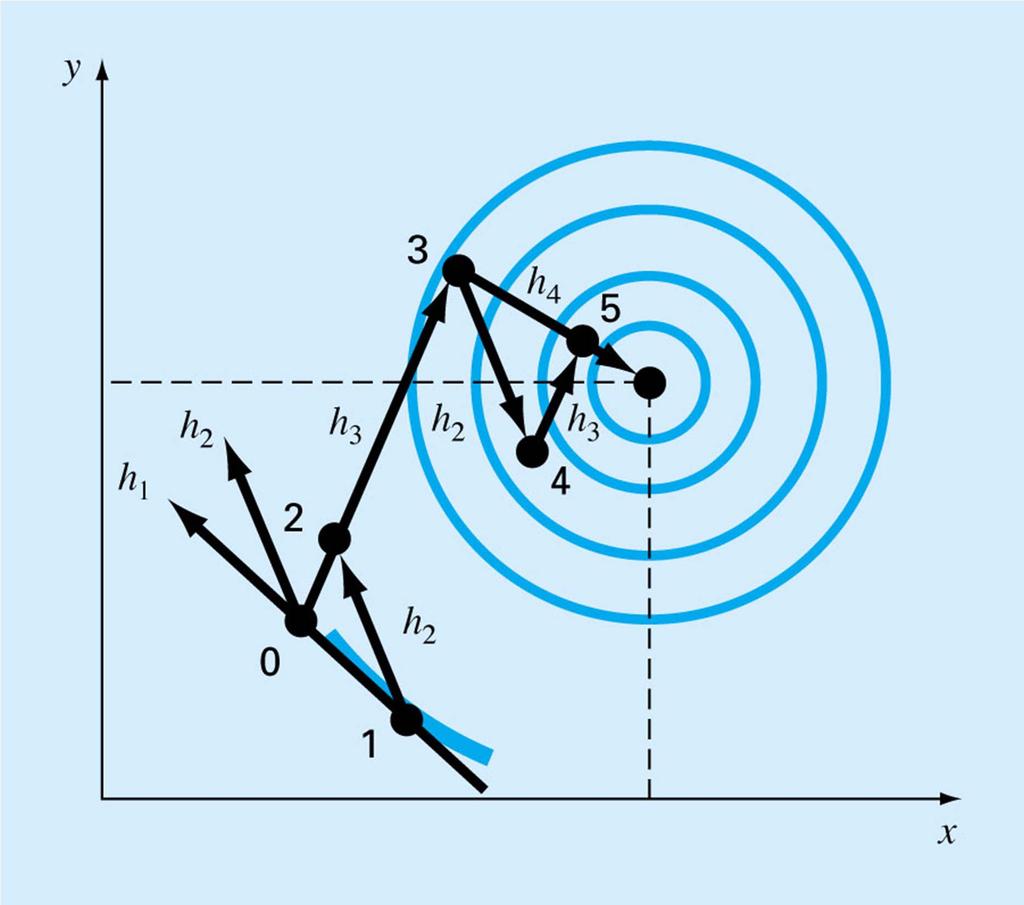
12 One-Variable-at-a Time Search Given a function f() of n variables, search in the direction in which only variable 1, changes Then search in the direction from that point in which only variable 2 changes, etc. Slow and inefficient in general Can speed up by searching in a direction after n changes (pattern direction)
13
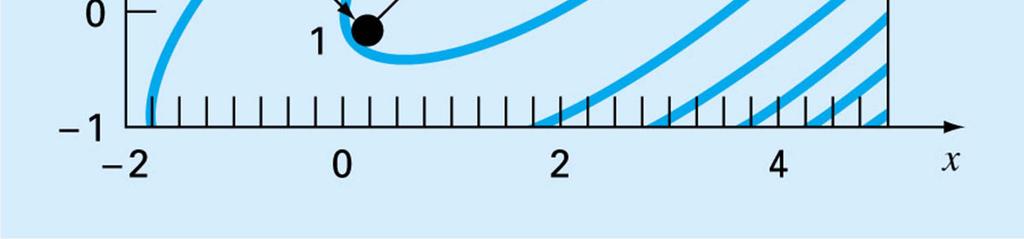
14 Powell s Method If f() is quadratic, and if two points are found by line searches in the same direction from two different starting points, then the line joining the two ending points (a conjugate direction) heads toward the optimum Since many functions we encounter are approximately quadratic near the optimum, this can be effective
15
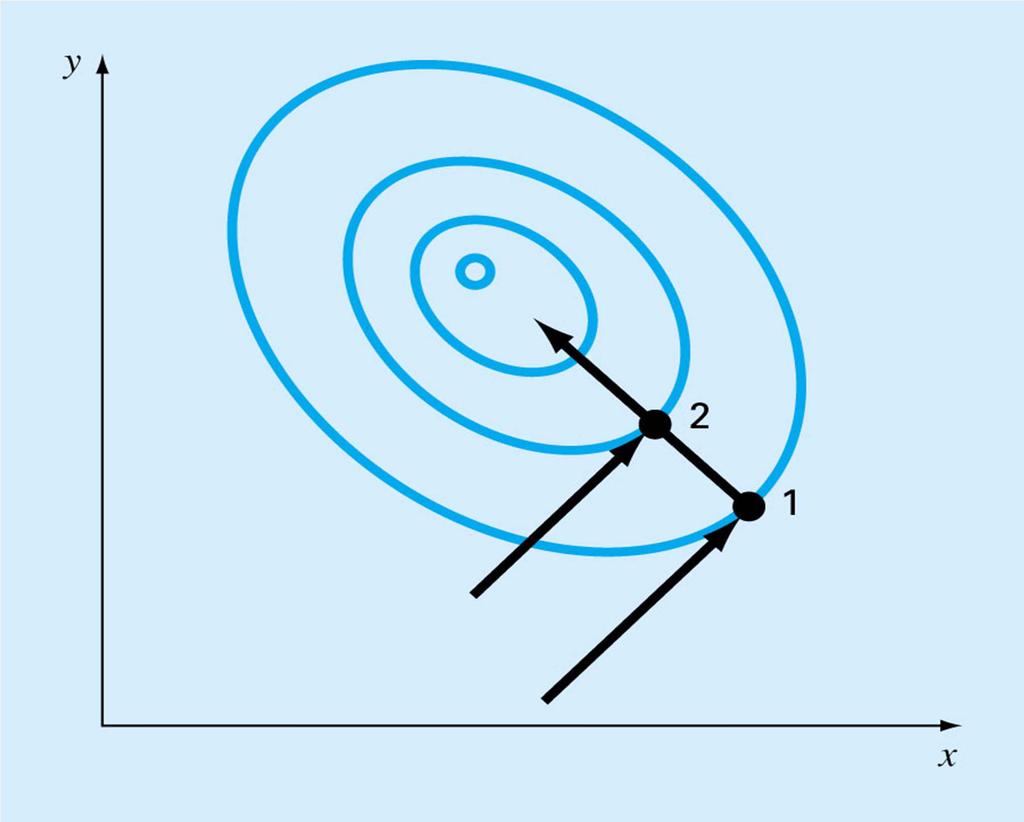
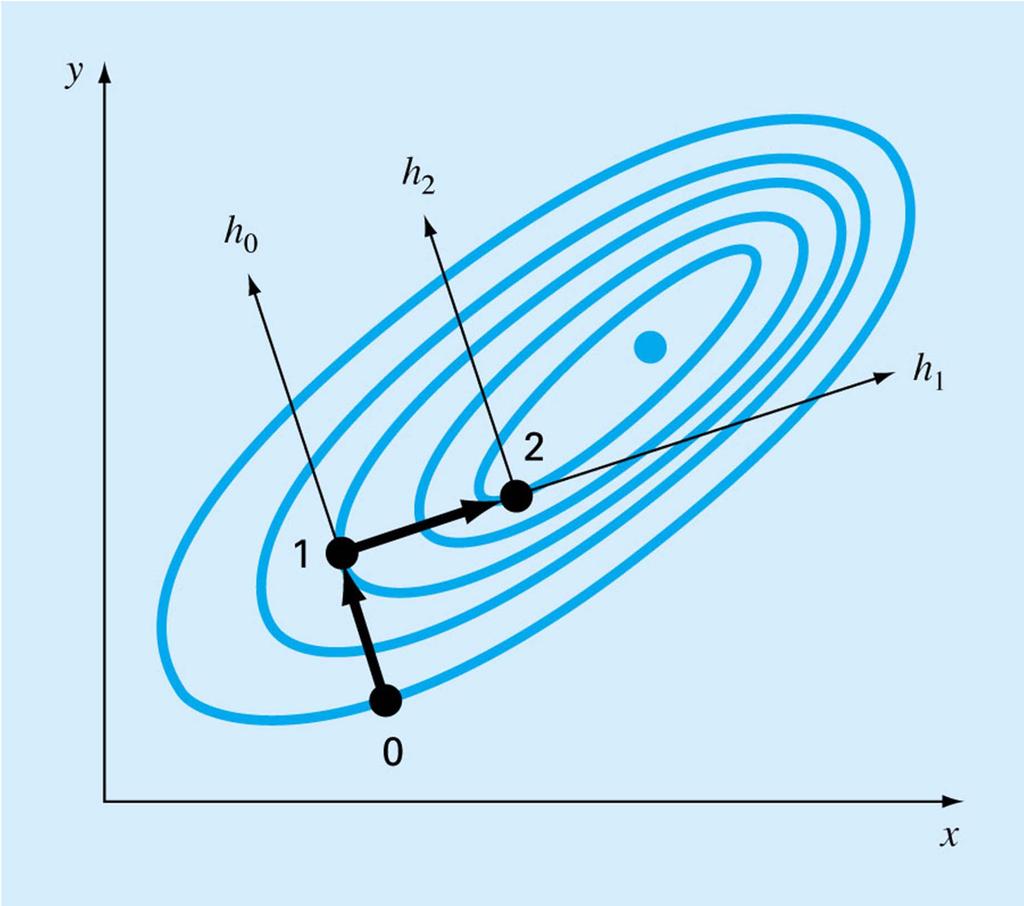
16 Start with a point x 0 and two random directions h 1 and h 2 Search in the direction of h 1 from x 0 to find a new point x 1 Search in the direction of h 2 from x 1 to find a new point x 2. Let h 3 be the direction joining x 0 to x 2 Search in the direction of h 3 from x 2 to find a new point x 3 Search in the direction of h 2 from x 3 to find a new point x 4 Search in the direction of h 3 from x 4 to find a new point x 5
17 Points x 3 and x 5 have been found by searching in the direction of h 3 from two starting points x 2 and x 4 Call the direction joining x 3 and x 5 h 4 Search in the direction of h 4 from x 5 to find a new point x 6 The new point x 6 will be exactly the optimum if f() is quadratic The iterations can then be repeated Errors estimated by change in x or in f()
18
19 Nelder-Mead Simplex Algorithm Direct search method that uses simplices, which are triangles in dimension 2, pyramids in dimension 3, etc. At each iteration a new point is added usually in the direction of the face of the simplex with largest function values
20
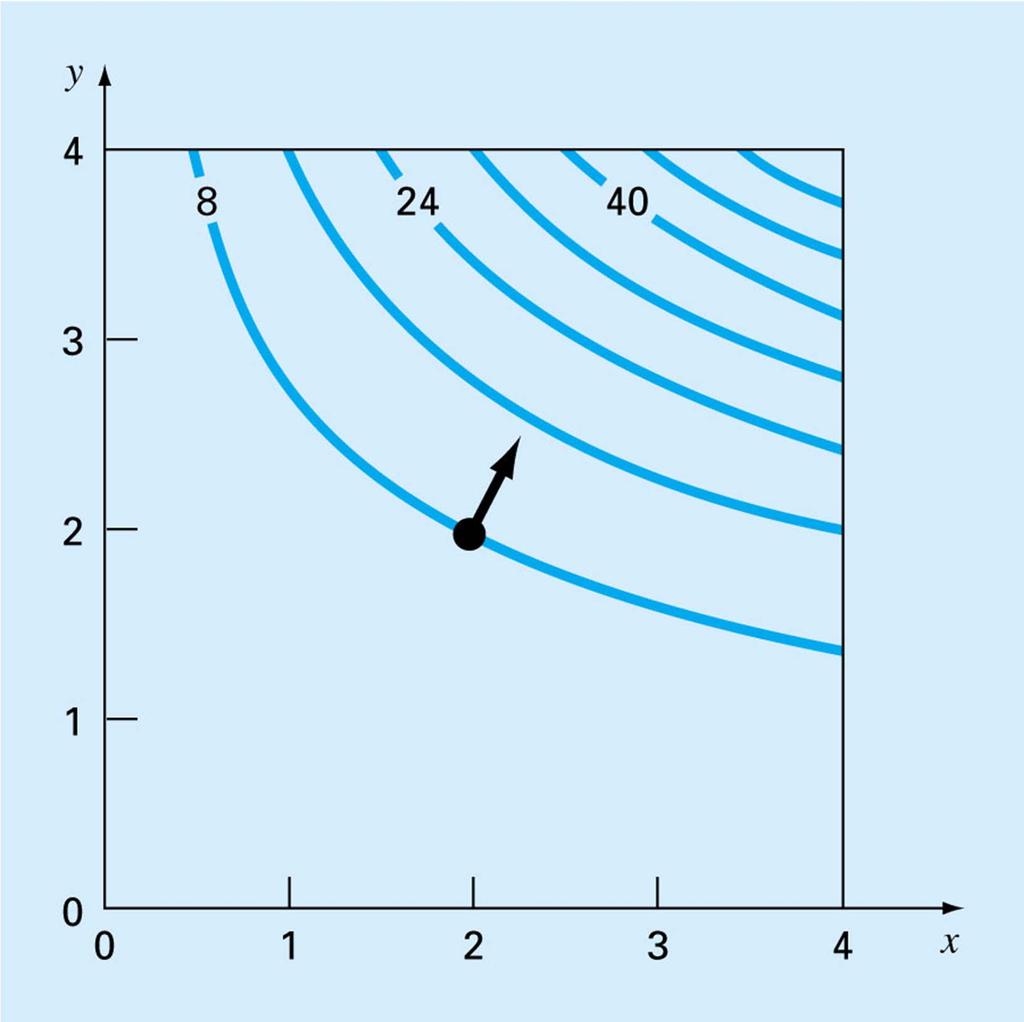
21 Gradient Methods The gradient of f() at a point x is the vector of partial derivatives of the function f() at x For smooth functions, the gradient is zero at an optimum, but may also be zero at a non-optimum The gradient points uphill The gradient is orthogonal to the contour lines of a function at a point
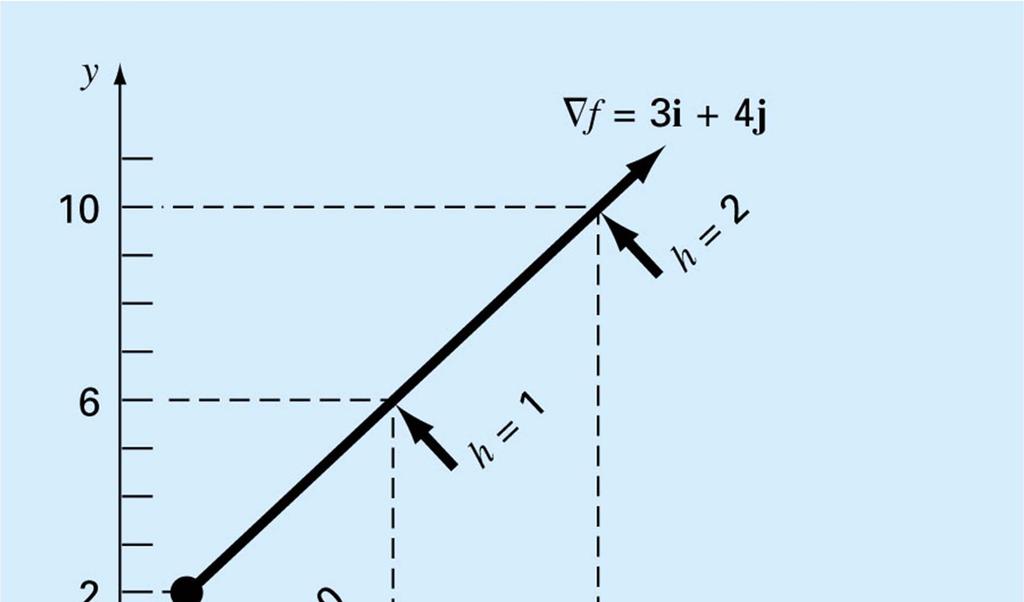
22 Directional Derivatives Given a point x in R n, a unit direction v, and a function f() of n variables, we can define a new function g() of one variable by g(λ)=f(x+λv) The derivative g (λ) is the directional derivative of f() at x in the direction of v This is greatest when v is in the gradient direction
23 x v 1 ( x, x,, x ) 1 2 ( v, v,, v ) T vv 1 2 i 1 2 i f( x) f( x, x,, x ) 1 2 f f f f,,, x x x 1 2 g( λ) f ( x λv) n v n n n T f f f g'(0) ( f) v v, v,, vn x x x n n
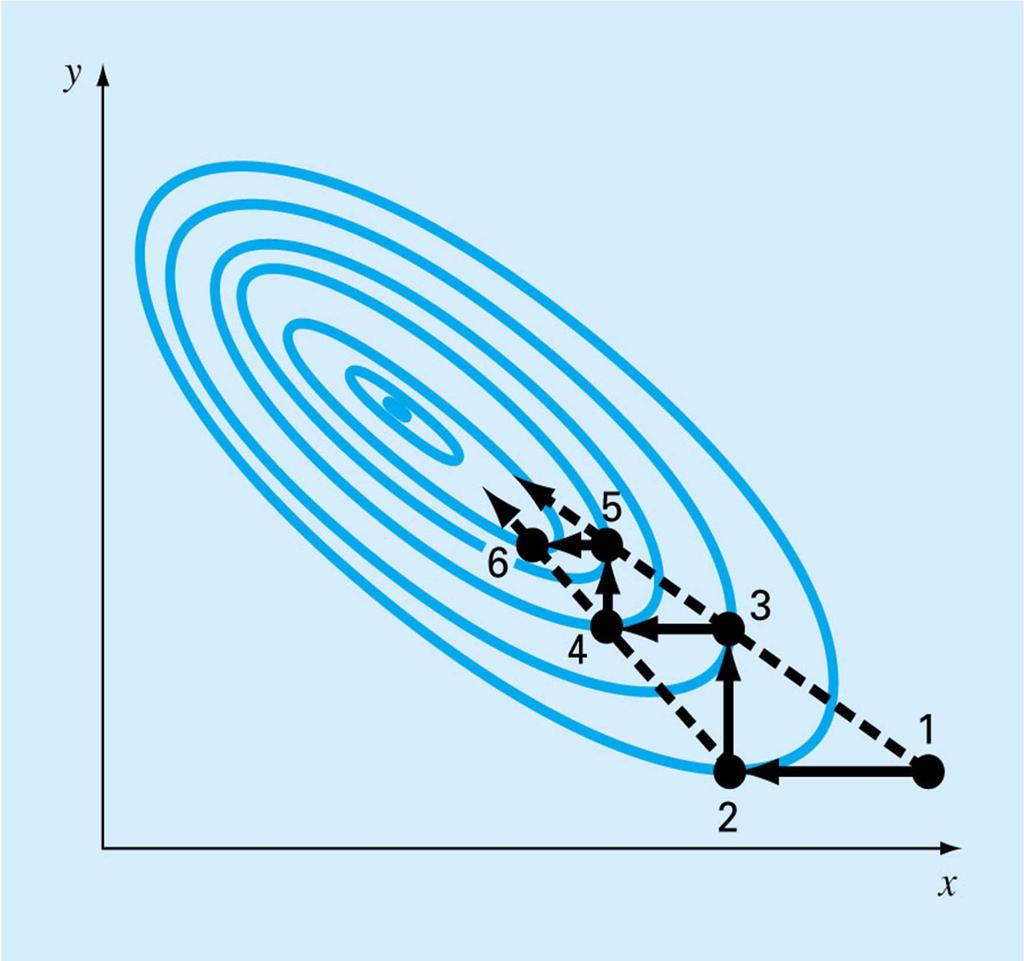
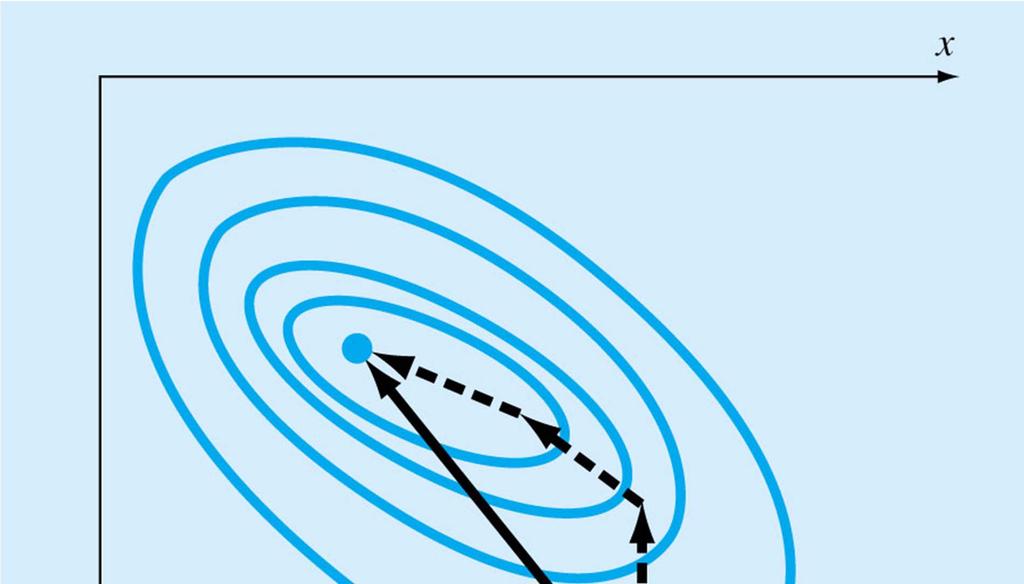
24 Steepest Ascent The gradient direction is the direction of steepest ascent, but not necessarily the direction leading directly to the summit We can search along the direction of steepest ascent until a maximum is reached Then we can search again from a new steepest ascent direction
25 x x f( x, x ) at (2,2) f (2,2) f ( x, x ) x f (2,2) 4 f ( x, x ) 2 x x f (2,2) f (2,2) (4,8) (2 4 λ,2 8 λ) is the gradient line g( λ) f (2 4 λ,2 8 λ) (2 4 λ)(2 8 λ) 2
26

27
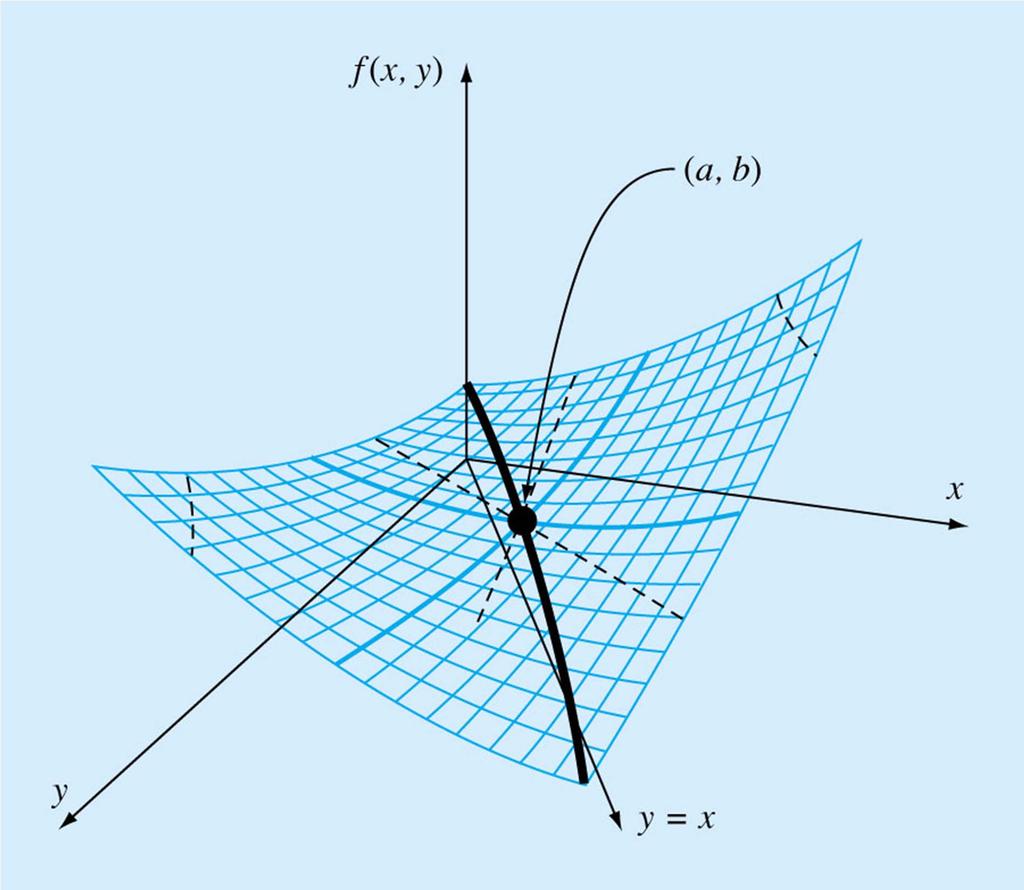
28 The Hessian The Hessian of a function f() is the matrix of second partial derivatives The gradient is always 0 at a maximum (for smooth functions) The gradient is also 0 at a minimum The gradient is also 0 at a saddle point, which is neither a maximum nor a minimum A saddle point is a max in at least one direction and a min in at least one direction
29
30 Max, Min, and Saddle Point For one-variable functions, the second derivative is negative at a maximum and positive at a minimum For functions of more than one variable, a zero of the gradient is a max if the second directional derivative is negative for every direction and is a min if the second directional derivative is positive for every direction
31 Positive Definiteness A matrix H is positive definite if x T Hx > 0 for every vector x Equivalently, every eigenvalue of H is positive λ is an eigenvalue of H with eigenvector x if Hx = λx -H is positive definite if every eigenvalue of H is negative
32 Max, Min, and Saddle Point If the gradient f of a function f is zero at a point x and the Hessian H is positive definite at that point, then x is a local min If f is zero at a point x and -H is positive definite at that point, then x is a local max If f is zero at a point x and neither H nor -H is positive definite at that point, then x is a saddle point The determinant H helps only in dimension 1 or 2
33 Finite-Difference Approximations If analytical derivatives cannot be evaluated, one can use finite-difference approximations Centered difference approximations are in general more accurate, though requiring extra function evaluations Increment often macheps 1/2 or 1e-8 for dp This can be problematic for large problems
34 Complexity of Finite-Difference Derivatives In an n-variable problem, the function value is one function evaluation (FE) A finite-difference gradient is n FE s if forward or backward and 2n FE s if centered. A finite difference Hessian is O(n 2 ) FE s With a thousand variable problem, this can be huge
35 Steepest Ascent/Descent This is the simplest of the gradient-based methods From the current guess, compute the gradient Search along the gradient direction until a local max is reached of this onedimensional function Repeat until convergence
36
37 f( x, x ) 2x x 2x x 2x f x f x ( x, x ) f ( x, x ) 2x 2 2x ( x, x ) f ( x, x ) 2x 4x True optimum 0 2x 2 2x x 4x x ( x, x ) (2,1) 2 2 H 2 4 2
38 Eigenvalues If H is a matrix, we can find the eigenvalues in a number of ways We will examine numerical methods for this later, but there is an algebraic method for small matrices We illustrate this for the Hessian in this example
39 H Hx H I x x ( 2)( 4) x 0 2 solution is a maximum
40 f x f x f( x, x ) 2x x 2x x 2x ( x, x ) f ( x, x ) 2x 2 2x ( x, x ) f ( x, x ) 2x 4x f ( 1,1) 7 f ( 1,1) 2x 2 2x f ( 1,1) 2x 4x g( ) f( 1 6,1 6 )
41 g( ) f( 1 6,1 6 ) 2( 1 6 )(1 6 ) 2( 1 6 ) ( 1 6 ) 2(1 6 ) g '( ) x ( 1 6(.2),1 6(.2)) (.2,.2) 2 2
42 f (2,1) 2 f (1, 1) 7 f (0.2, 0.2) 0.2 f f 1 2 (0.2, 0.2) 1.2 (0.2, 0.2) 1.2 g( ) f( , ) g '( ) f (1.4,1) 1.64
43
44 Practical Steepest Ascent In real examples, the maximum in the gradient direction cannot be calculated analytically Problem reduces to one dimensional optimization as a line search One can also use more primitive line searches that are fast but do not try to find the absolute optimum
45 Newton s Method Steepest ascent can be quite slow Newton s method is faster, though it requires evaluation of the Hessian Function is modeled by a quadratic at a point using first and second derivatives The quadratic is solved exactly This is used as the next iterate
46 A second-order multivariate Taylor series expansion at the current iterate is T T f( x) f( x ) f ( x )( x x ) 0.5( x x ) H ( x x ) i i i i i i At the optimum, the gradient is 0, so f( x) f( x ) H ( x x ) 0 i i i If H is invertible,then 1 x i 1 x i H i f( xi) In practice, solve the linear problem, H x H x f( x ) i i i i

47
48 Variations on Newton s Method Quasi-Newton methods use approximate Hessians that are built up as the iterations progress. There are several methods of doing this, the best is probably BFGS (Broyden-Fletcher-Goldfarb-Shanno) These do not require analytical or numerical Hessians to be calculated at each step
49 The Marquardt algorithm uses a compromise between steepest ascent and the Newton solution The steepest ascent direction is equivalent to using H=I Thus, if we use a Hessian of H+αI, and gradually reduce α from a large value, we get steepest ascent at first followed by more and more of the Newton direction
50 The trust region approach is an alternative to line searches Rather than searching along the gradient, or moving directly to the Newton solution (which may diverge), the trust region approach finds the maximum/minimum value of the quadratic model subject to a constraint on the stepsize This also results in a mixture of gradient and Newton until the Newton step is in the trust region
51 Using Matlab to find Optima fminbnd finds the minimum of a onevariable function fminsearch finds the minimum of a multivariable function fminunc (in the Optimization Toolbox) also finds minima of unconstrained functions
52 fminbnd Finds the minimum of a function of one variable on a closed interval. Assumes the function is continuous Uses a combination of golden section search and quadratic interpolation Exhibits slow convergence when the minimum is near the boundary fmincon is better (in Optimization Toolbox)
53 fminsearch Direct search method for functions of several variables Does not assume differentiability Can handle discontinuities Uses Nelder-Mead simplex algorithm Tends to be reliable but slow
54 fminunc Finds minima in unconstrained problems in several to large dimension For medium-scale optimization uses quasi-newton method with BFGS updates and mixed quadratic-cubic line search For large-scale optimization uses subspace trust-region method based on interior-reflective Newton method using preconditioned conjugate gradients
55 function f=fx(x) f=-(2*sin(x)-x^2/10) >> [ x fval ] = fminbnd('fx',0,4) >> x x = >> fval fval =
56 function f=fxy(x) f=-(2*x(1)*x(2)+2*x(1)-x(1)^2-2*x(2)^2) >> [ x fval ] = fminsearch('fxy',[-1,1]) >> x x = >> fval fval = >> [ x fval ] = fminunc('fxy',[-1,1]) >> x x = >> fval fval =
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
Optimization: Nonlinear Optimization without Constraints. Nonlinear Optimization without Constraints 1 / 23
 Optimization: Nonlinear Optimization without Constraints Nonlinear Optimization without Constraints 1 / 23 Nonlinear optimization without constraints Unconstrained minimization min x f(x) where f(x) is
Optimization: Nonlinear Optimization without Constraints Nonlinear Optimization without Constraints 1 / 23 Nonlinear optimization without constraints Unconstrained minimization min x f(x) where f(x) is
Lecture V. Numerical Optimization
 Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
1 Numerical optimization
 Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
Unconstrained Multivariate Optimization
 Unconstrained Multivariate Optimization Multivariate optimization means optimization of a scalar function of a several variables: and has the general form: y = () min ( ) where () is a nonlinear scalar-valued
Unconstrained Multivariate Optimization Multivariate optimization means optimization of a scalar function of a several variables: and has the general form: y = () min ( ) where () is a nonlinear scalar-valued
Optimization Methods
 Optimization Methods Decision making Examples: determining which ingredients and in what quantities to add to a mixture being made so that it will meet specifications on its composition allocating available
Optimization Methods Decision making Examples: determining which ingredients and in what quantities to add to a mixture being made so that it will meet specifications on its composition allocating available
NonlinearOptimization
 1/35 NonlinearOptimization Pavel Kordík Department of Computer Systems Faculty of Information Technology Czech Technical University in Prague Jiří Kašpar, Pavel Tvrdík, 2011 Unconstrained nonlinear optimization,
1/35 NonlinearOptimization Pavel Kordík Department of Computer Systems Faculty of Information Technology Czech Technical University in Prague Jiří Kašpar, Pavel Tvrdík, 2011 Unconstrained nonlinear optimization,
Optimization and Root Finding. Kurt Hornik
 Optimization and Root Finding Kurt Hornik Basics Root finding and unconstrained smooth optimization are closely related: Solving ƒ () = 0 can be accomplished via minimizing ƒ () 2 Slide 2 Basics Root finding
Optimization and Root Finding Kurt Hornik Basics Root finding and unconstrained smooth optimization are closely related: Solving ƒ () = 0 can be accomplished via minimizing ƒ () 2 Slide 2 Basics Root finding
1 Numerical optimization
 Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Introduction to unconstrained optimization - direct search methods
 Introduction to unconstrained optimization - direct search methods Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi Structure of optimization methods Typically Constraint handling converts the
Introduction to unconstrained optimization - direct search methods Jussi Hakanen Post-doctoral researcher jussi.hakanen@jyu.fi Structure of optimization methods Typically Constraint handling converts the
Motivation: We have already seen an example of a system of nonlinear equations when we studied Gaussian integration (p.8 of integration notes)
") AMSC/CMSC 460 Computational Methods, Fall 2007 UNIT 5: Nonlinear Equations Dianne P. O Leary c 2001, 2002, 2007 Solving Nonlinear Equations and Optimization Problems Read Chapter 8. Skip Section 8.1.1.
AMSC/CMSC 460 Computational Methods, Fall 2007 UNIT 5: Nonlinear Equations Dianne P. O Leary c 2001, 2002, 2007 Solving Nonlinear Equations and Optimization Problems Read Chapter 8. Skip Section 8.1.1.
Convex Optimization. Problem set 2. Due Monday April 26th
 Convex Optimization Problem set 2 Due Monday April 26th 1 Gradient Decent without Line-search In this problem we will consider gradient descent with predetermined step sizes. That is, instead of determining
Convex Optimization Problem set 2 Due Monday April 26th 1 Gradient Decent without Line-search In this problem we will consider gradient descent with predetermined step sizes. That is, instead of determining
ECS550NFB Introduction to Numerical Methods using Matlab Day 2
 ECS550NFB Introduction to Numerical Methods using Matlab Day 2 Lukas Laffers lukas.laffers@umb.sk Department of Mathematics, University of Matej Bel June 9, 2015 Today Root-finding: find x that solves
ECS550NFB Introduction to Numerical Methods using Matlab Day 2 Lukas Laffers lukas.laffers@umb.sk Department of Mathematics, University of Matej Bel June 9, 2015 Today Root-finding: find x that solves
Quasi-Newton Methods
 Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Numerical Optimization Professor Horst Cerjak, Horst Bischof, Thomas Pock Mat Vis-Gra SS09
 Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
AM 205: lecture 19. Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods
 AM 205: lecture 19 Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods Optimality Conditions: Equality Constrained Case As another example of equality
AM 205: lecture 19 Last time: Conditions for optimality Today: Newton s method for optimization, survey of optimization methods Optimality Conditions: Equality Constrained Case As another example of equality
Comparative study of Optimization methods for Unconstrained Multivariable Nonlinear Programming Problems
 International Journal of Scientific and Research Publications, Volume 3, Issue 10, October 013 1 ISSN 50-3153 Comparative study of Optimization methods for Unconstrained Multivariable Nonlinear Programming
International Journal of Scientific and Research Publications, Volume 3, Issue 10, October 013 1 ISSN 50-3153 Comparative study of Optimization methods for Unconstrained Multivariable Nonlinear Programming
8 Numerical methods for unconstrained problems
 8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
Statistics 580 Optimization Methods
 Statistics 580 Optimization Methods Introduction Let fx be a given real-valued function on R p. The general optimization problem is to find an x ɛ R p at which fx attain a maximum or a minimum. It is of
Statistics 580 Optimization Methods Introduction Let fx be a given real-valued function on R p. The general optimization problem is to find an x ɛ R p at which fx attain a maximum or a minimum. It is of
Optimization II: Unconstrained Multivariable
 Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Optimization II: Unconstrained Multivariable 1
Line Search Methods for Unconstrained Optimisation
 Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Static unconstrained optimization
 Static unconstrained optimization 2 In unconstrained optimization an objective function is minimized without any additional restriction on the decision variables, i.e. min f(x) x X ad (2.) with X ad R
Static unconstrained optimization 2 In unconstrained optimization an objective function is minimized without any additional restriction on the decision variables, i.e. min f(x) x X ad (2.) with X ad R
Convex Optimization CMU-10725
 Convex Optimization CMU-10725 Quasi Newton Methods Barnabás Póczos & Ryan Tibshirani Quasi Newton Methods 2 Outline Modified Newton Method Rank one correction of the inverse Rank two correction of the
Convex Optimization CMU-10725 Quasi Newton Methods Barnabás Póczos & Ryan Tibshirani Quasi Newton Methods 2 Outline Modified Newton Method Rank one correction of the inverse Rank two correction of the
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Methods that avoid calculating the Hessian. Nonlinear Optimization; Steepest Descent, Quasi-Newton. Steepest Descent
 Nonlinear Optimization Steepest Descent and Niclas Börlin Department of Computing Science Umeå University niclas.borlin@cs.umu.se A disadvantage with the Newton method is that the Hessian has to be derived
Nonlinear Optimization Steepest Descent and Niclas Börlin Department of Computing Science Umeå University niclas.borlin@cs.umu.se A disadvantage with the Newton method is that the Hessian has to be derived
AM 205: lecture 19. Last time: Conditions for optimality, Newton s method for optimization Today: survey of optimization methods
 AM 205: lecture 19 Last time: Conditions for optimality, Newton s method for optimization Today: survey of optimization methods Quasi-Newton Methods General form of quasi-newton methods: x k+1 = x k α
AM 205: lecture 19 Last time: Conditions for optimality, Newton s method for optimization Today: survey of optimization methods Quasi-Newton Methods General form of quasi-newton methods: x k+1 = x k α
Chapter 4. Unconstrained optimization
 Chapter 4. Unconstrained optimization Version: 28-10-2012 Material: (for details see) Chapter 11 in [FKS] (pp.251-276) A reference e.g. L.11.2 refers to the corresponding Lemma in the book [FKS] PDF-file
Chapter 4. Unconstrained optimization Version: 28-10-2012 Material: (for details see) Chapter 11 in [FKS] (pp.251-276) A reference e.g. L.11.2 refers to the corresponding Lemma in the book [FKS] PDF-file
Numerical Optimization
 Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
Math 411 Preliminaries
 Math 411 Preliminaries Provide a list of preliminary vocabulary and concepts Preliminary Basic Netwon s method, Taylor series expansion (for single and multiple variables), Eigenvalue, Eigenvector, Vector
Math 411 Preliminaries Provide a list of preliminary vocabulary and concepts Preliminary Basic Netwon s method, Taylor series expansion (for single and multiple variables), Eigenvalue, Eigenvector, Vector
Unconstrained optimization
 Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
Lecture 7 Unconstrained nonlinear programming
 Lecture 7 Unconstrained nonlinear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
Lecture 7 Unconstrained nonlinear programming Weinan E 1,2 and Tiejun Li 2 1 Department of Mathematics, Princeton University, weinan@princeton.edu 2 School of Mathematical Sciences, Peking University,
Optimization. Totally not complete this is...don't use it yet...
 Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
(One Dimension) Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)
 Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)") Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
5 Quasi-Newton Methods
 Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
Unconstrained Convex Optimization 26 5 Quasi-Newton Methods If the Hessian is unavailable... Notation: H = Hessian matrix. B is the approximation of H. C is the approximation of H 1. Problem: Solve min
Lecture Notes: Geometric Considerations in Unconstrained Optimization
 Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
Numerisches Rechnen. (für Informatiker) M. Grepl P. Esser & G. Welper & L. Zhang. Institut für Geometrie und Praktische Mathematik RWTH Aachen
 M. Grepl P. Esser & G. Welper & L. Zhang. Institut für Geometrie und Praktische Mathematik RWTH Aachen") Numerisches Rechnen (für Informatiker) M. Grepl P. Esser & G. Welper & L. Zhang Institut für Geometrie und Praktische Mathematik RWTH Aachen Wintersemester 2011/12 IGPM, RWTH Aachen Numerisches Rechnen
Numerisches Rechnen (für Informatiker) M. Grepl P. Esser & G. Welper & L. Zhang Institut für Geometrie und Praktische Mathematik RWTH Aachen Wintersemester 2011/12 IGPM, RWTH Aachen Numerisches Rechnen
Geometry optimization
 Geometry optimization Trygve Helgaker Centre for Theoretical and Computational Chemistry Department of Chemistry, University of Oslo, Norway European Summer School in Quantum Chemistry (ESQC) 211 Torre
Geometry optimization Trygve Helgaker Centre for Theoretical and Computational Chemistry Department of Chemistry, University of Oslo, Norway European Summer School in Quantum Chemistry (ESQC) 211 Torre
Gradient Descent. Dr. Xiaowei Huang
 Gradient Descent Dr. Xiaowei Huang https://cgi.csc.liv.ac.uk/~xiaowei/ Up to now, Three machine learning algorithms: decision tree learning k-nn linear regression only optimization objectives are discussed,
Gradient Descent Dr. Xiaowei Huang https://cgi.csc.liv.ac.uk/~xiaowei/ Up to now, Three machine learning algorithms: decision tree learning k-nn linear regression only optimization objectives are discussed,
Shiqian Ma, MAT-258A: Numerical Optimization 1. Chapter 3. Gradient Method
 Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 3 Gradient Method Shiqian Ma, MAT-258A: Numerical Optimization 2 3.1. Gradient method Classical gradient method: to minimize a differentiable convex
Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 3 Gradient Method Shiqian Ma, MAT-258A: Numerical Optimization 2 3.1. Gradient method Classical gradient method: to minimize a differentiable convex
OPER 627: Nonlinear Optimization Lecture 14: Mid-term Review
 OPER 627: Nonlinear Optimization Lecture 14: Mid-term Review Department of Statistical Sciences and Operations Research Virginia Commonwealth University Oct 16, 2013 (Lecture 14) Nonlinear Optimization
OPER 627: Nonlinear Optimization Lecture 14: Mid-term Review Department of Statistical Sciences and Operations Research Virginia Commonwealth University Oct 16, 2013 (Lecture 14) Nonlinear Optimization
Optimization II: Unconstrained Multivariable
 Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization II: Unconstrained
Optimization II: Unconstrained Multivariable CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Optimization II: Unconstrained
Optimization. Next: Curve Fitting Up: Numerical Analysis for Chemical Previous: Linear Algebraic and Equations. Subsections
 Next: Curve Fitting Up: Numerical Analysis for Chemical Previous: Linear Algebraic and Equations Subsections One-dimensional Unconstrained Optimization Golden-Section Search Quadratic Interpolation Newton's
Next: Curve Fitting Up: Numerical Analysis for Chemical Previous: Linear Algebraic and Equations Subsections One-dimensional Unconstrained Optimization Golden-Section Search Quadratic Interpolation Newton's
Outline. Scientific Computing: An Introductory Survey. Optimization. Optimization Problems. Examples: Optimization Problems
 Outline Scientific Computing: An Introductory Survey Chapter 6 Optimization 1 Prof. Michael. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Outline Scientific Computing: An Introductory Survey Chapter 6 Optimization 1 Prof. Michael. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
MATH 4211/6211 Optimization Quasi-Newton Method
 MATH 4211/6211 Optimization Quasi-Newton Method Xiaojing Ye Department of Mathematics & Statistics Georgia State University Xiaojing Ye, Math & Stat, Georgia State University 0 Quasi-Newton Method Motivation:
MATH 4211/6211 Optimization Quasi-Newton Method Xiaojing Ye Department of Mathematics & Statistics Georgia State University Xiaojing Ye, Math & Stat, Georgia State University 0 Quasi-Newton Method Motivation:
Optimization 2. CS5240 Theoretical Foundations in Multimedia. Leow Wee Kheng
 Optimization 2 CS5240 Theoretical Foundations in Multimedia Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (NUS) Optimization 2 1 / 38
Optimization 2 CS5240 Theoretical Foundations in Multimedia Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (NUS) Optimization 2 1 / 38
Numerical Methods I Solving Nonlinear Equations
 Numerical Methods I Solving Nonlinear Equations Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 October 16th, 2014 A. Donev (Courant Institute)
Numerical Methods I Solving Nonlinear Equations Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 October 16th, 2014 A. Donev (Courant Institute)
Optimization Methods
 Optimization Methods Categorization of Optimization Problems Continuous Optimization Discrete Optimization Combinatorial Optimization Variational Optimization Common Optimization Concepts in Computer Vision
Optimization Methods Categorization of Optimization Problems Continuous Optimization Discrete Optimization Combinatorial Optimization Variational Optimization Common Optimization Concepts in Computer Vision
Constrained optimization. Unconstrained optimization. One-dimensional. Multi-dimensional. Newton with equality constraints. Active-set method.
 Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
Exploring the energy landscape
 Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
Numerical optimization
 Numerical optimization Lecture 4 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 2 Longest Slowest Shortest Minimal Maximal
Numerical optimization Lecture 4 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 2 Longest Slowest Shortest Minimal Maximal
Lecture 7: Minimization or maximization of functions (Recipes Chapter 10)
") Lecture 7: Minimization or maximization of functions (Recipes Chapter 10) Actively studied subject for several reasons: Commonly encountered problem: e.g. Hamilton s and Lagrange s principles, economics
Lecture 7: Minimization or maximization of functions (Recipes Chapter 10) Actively studied subject for several reasons: Commonly encountered problem: e.g. Hamilton s and Lagrange s principles, economics
Nonlinear Optimization: What s important?
 Nonlinear Optimization: What s important? Julian Hall 10th May 2012 Convexity: convex problems A local minimizer is a global minimizer A solution of f (x) = 0 (stationary point) is a minimizer A global
Nonlinear Optimization: What s important? Julian Hall 10th May 2012 Convexity: convex problems A local minimizer is a global minimizer A solution of f (x) = 0 (stationary point) is a minimizer A global
Multivariate Newton Minimanization
 Multivariate Newton Minimanization Optymalizacja syntezy biosurfaktantu Rhamnolipid Rhamnolipids are naturally occuring glycolipid produced commercially by the Pseudomonas aeruginosa species of bacteria.
Multivariate Newton Minimanization Optymalizacja syntezy biosurfaktantu Rhamnolipid Rhamnolipids are naturally occuring glycolipid produced commercially by the Pseudomonas aeruginosa species of bacteria.
Algorithms for Constrained Optimization
 1 / 42 Algorithms for Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University April 19, 2015 2 / 42 Outline 1. Convergence 2. Sequential quadratic
1 / 42 Algorithms for Constrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University April 19, 2015 2 / 42 Outline 1. Convergence 2. Sequential quadratic
Numerical optimization. Numerical optimization. Longest Shortest where Maximal Minimal. Fastest. Largest. Optimization problems
 1 Numerical optimization Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book Numerical optimization 048921 Advanced topics in vision Processing and Analysis of
1 Numerical optimization Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book Numerical optimization 048921 Advanced topics in vision Processing and Analysis of
Numerical optimization
 THE UNIVERSITY OF WESTERN ONTARIO LONDON ONTARIO Paul Klein Office: SSC 408 Phone: 661-111 ext. 857 Email: paul.klein@uwo.ca URL: www.ssc.uwo.ca/economics/faculty/klein/ Numerical optimization In these
THE UNIVERSITY OF WESTERN ONTARIO LONDON ONTARIO Paul Klein Office: SSC 408 Phone: 661-111 ext. 857 Email: paul.klein@uwo.ca URL: www.ssc.uwo.ca/economics/faculty/klein/ Numerical optimization In these
, b = 0. (2) 1 2 The eigenvectors of A corresponding to the eigenvalues λ 1 = 1, λ 2 = 3 are
 1 2 The eigenvectors of A corresponding to the eigenvalues λ 1 = 1, λ 2 = 3 are") Quadratic forms We consider the quadratic function f : R 2 R defined by f(x) = 2 xt Ax b T x with x = (x, x 2 ) T, () where A R 2 2 is symmetric and b R 2. We will see that, depending on the eigenvalues
Quadratic forms We consider the quadratic function f : R 2 R defined by f(x) = 2 xt Ax b T x with x = (x, x 2 ) T, () where A R 2 2 is symmetric and b R 2. We will see that, depending on the eigenvalues
Scientific Computing: Optimization
 Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2. Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year
 MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2 1 Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 8 topics: quadratic optimisation, least squares,
MATHEMATICS FOR COMPUTER VISION WEEK 8 OPTIMISATION PART 2 1 Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 8 topics: quadratic optimisation, least squares,
Neural Network Training
 Neural Network Training Sargur Srihari Topics in Network Training 0. Neural network parameters Probabilistic problem formulation Specifying the activation and error functions for Regression Binary classification
Neural Network Training Sargur Srihari Topics in Network Training 0. Neural network parameters Probabilistic problem formulation Specifying the activation and error functions for Regression Binary classification
Optimization. Escuela de Ingeniería Informática de Oviedo. (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30
 Numerical Computation Optimization 1 / 30") Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
Optimization Escuela de Ingeniería Informática de Oviedo (Dpto. de Matemáticas-UniOvi) Numerical Computation Optimization 1 / 30 Unconstrained optimization Outline 1 Unconstrained optimization 2 Constrained
Lecture 8 Optimization
 4/9/015 Lecture 8 Optimization EE 4386/5301 Computational Methods in EE Spring 015 Optimization 1 Outline Introduction 1D Optimization Parabolic interpolation Golden section search Newton s method Multidimensional
4/9/015 Lecture 8 Optimization EE 4386/5301 Computational Methods in EE Spring 015 Optimization 1 Outline Introduction 1D Optimization Parabolic interpolation Golden section search Newton s method Multidimensional
Mathematical optimization
 Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
STAT Advanced Bayesian Inference
 1 / 8 STAT 625 - Advanced Bayesian Inference Meng Li Department of Statistics March 5, 2018 Distributional approximations 2 / 8 Distributional approximations are useful for quick inferences, as starting
1 / 8 STAT 625 - Advanced Bayesian Inference Meng Li Department of Statistics March 5, 2018 Distributional approximations 2 / 8 Distributional approximations are useful for quick inferences, as starting
Minimization of Static! Cost Functions!
 Minimization of Static Cost Functions Robert Stengel Optimal Control and Estimation, MAE 546, Princeton University, 2017 J = Static cost function with constant control parameter vector, u Conditions for
Minimization of Static Cost Functions Robert Stengel Optimal Control and Estimation, MAE 546, Princeton University, 2017 J = Static cost function with constant control parameter vector, u Conditions for
CS 542G: Robustifying Newton, Constraints, Nonlinear Least Squares
 CS 542G: Robustifying Newton, Constraints, Nonlinear Least Squares Robert Bridson October 29, 2008 1 Hessian Problems in Newton Last time we fixed one of plain Newton s problems by introducing line search
CS 542G: Robustifying Newton, Constraints, Nonlinear Least Squares Robert Bridson October 29, 2008 1 Hessian Problems in Newton Last time we fixed one of plain Newton s problems by introducing line search
Derivative-Free Optimization of Noisy Functions via Quasi-Newton Methods. Jorge Nocedal
 Derivative-Free Optimization of Noisy Functions via Quasi-Newton Methods Jorge Nocedal Northwestern University Huatulco, Jan 2018 1 Collaborators Albert Berahas Northwestern University Richard Byrd University
Derivative-Free Optimization of Noisy Functions via Quasi-Newton Methods Jorge Nocedal Northwestern University Huatulco, Jan 2018 1 Collaborators Albert Berahas Northwestern University Richard Byrd University
Higher-Order Methods
 Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
CHAPTER 2: QUADRATIC PROGRAMMING
 CHAPTER 2: QUADRATIC PROGRAMMING Overview Quadratic programming (QP) problems are characterized by objective functions that are quadratic in the design variables, and linear constraints. In this sense,
CHAPTER 2: QUADRATIC PROGRAMMING Overview Quadratic programming (QP) problems are characterized by objective functions that are quadratic in the design variables, and linear constraints. In this sense,
Introduction to Unconstrained Optimization: Part 2
 Introduction to Unconstrained Optimization: Part 2 James Allison ME 555 January 29, 2007 Overview Recap Recap selected concepts from last time (with examples) Use of quadratic functions Tests for positive
Introduction to Unconstrained Optimization: Part 2 James Allison ME 555 January 29, 2007 Overview Recap Recap selected concepts from last time (with examples) Use of quadratic functions Tests for positive
Today. Introduction to optimization Definition and motivation 1-dimensional methods. Multi-dimensional methods. General strategies, value-only methods
 Optimization Last time Root inding: deinition, motivation Algorithms: Bisection, alse position, secant, Newton-Raphson Convergence & tradeos Eample applications o Newton s method Root inding in > 1 dimension
Optimization Last time Root inding: deinition, motivation Algorithms: Bisection, alse position, secant, Newton-Raphson Convergence & tradeos Eample applications o Newton s method Root inding in > 1 dimension
Applied Computational Economics Workshop. Part 3: Nonlinear Equations
 Applied Computational Economics Workshop Part 3: Nonlinear Equations 1 Overview Introduction Function iteration Newton s method Quasi-Newton methods Practical example Practical issues 2 Introduction Nonlinear
Applied Computational Economics Workshop Part 3: Nonlinear Equations 1 Overview Introduction Function iteration Newton s method Quasi-Newton methods Practical example Practical issues 2 Introduction Nonlinear
Nonlinear Optimization for Optimal Control
 Nonlinear Optimization for Optimal Control Pieter Abbeel UC Berkeley EECS Many slides and figures adapted from Stephen Boyd [optional] Boyd and Vandenberghe, Convex Optimization, Chapters 9 11 [optional]
Nonlinear Optimization for Optimal Control Pieter Abbeel UC Berkeley EECS Many slides and figures adapted from Stephen Boyd [optional] Boyd and Vandenberghe, Convex Optimization, Chapters 9 11 [optional]
Nonlinear Programming
 Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
Performance Surfaces and Optimum Points
 CSC 302 1.5 Neural Networks Performance Surfaces and Optimum Points 1 Entrance Performance learning is another important class of learning law. Network parameters are adjusted to optimize the performance
CSC 302 1.5 Neural Networks Performance Surfaces and Optimum Points 1 Entrance Performance learning is another important class of learning law. Network parameters are adjusted to optimize the performance
ECE 595, Section 10 Numerical Simulations Lecture 7: Optimization and Eigenvalues. Prof. Peter Bermel January 23, 2013
 ECE 595, Section 10 Numerical Simulations Lecture 7: Optimization and Eigenvalues Prof. Peter Bermel January 23, 2013 Outline Recap from Friday Optimization Methods Brent s Method Golden Section Search
ECE 595, Section 10 Numerical Simulations Lecture 7: Optimization and Eigenvalues Prof. Peter Bermel January 23, 2013 Outline Recap from Friday Optimization Methods Brent s Method Golden Section Search
10.34 Numerical Methods Applied to Chemical Engineering Fall Quiz #1 Review
 10.34 Numerical Methods Applied to Chemical Engineering Fall 2015 Quiz #1 Review Study guide based on notes developed by J.A. Paulson, modified by K. Severson Linear Algebra We ve covered three major topics
10.34 Numerical Methods Applied to Chemical Engineering Fall 2015 Quiz #1 Review Study guide based on notes developed by J.A. Paulson, modified by K. Severson Linear Algebra We ve covered three major topics
NUMERICAL MATHEMATICS AND COMPUTING
 NUMERICAL MATHEMATICS AND COMPUTING Fourth Edition Ward Cheney David Kincaid The University of Texas at Austin 9 Brooks/Cole Publishing Company I(T)P An International Thomson Publishing Company Pacific
NUMERICAL MATHEMATICS AND COMPUTING Fourth Edition Ward Cheney David Kincaid The University of Texas at Austin 9 Brooks/Cole Publishing Company I(T)P An International Thomson Publishing Company Pacific
4M020 Design tools. Algorithms for numerical optimization. L.F.P. Etman. Department of Mechanical Engineering Eindhoven University of Technology
 4M020 Design tools Algorithms for numerical optimization L.F.P. Etman Department of Mechanical Engineering Eindhoven University of Technology Wednesday September 3, 2008 1 / 32 Outline 1 Problem formulation:
4M020 Design tools Algorithms for numerical optimization L.F.P. Etman Department of Mechanical Engineering Eindhoven University of Technology Wednesday September 3, 2008 1 / 32 Outline 1 Problem formulation:
Contents. Preface. 1 Introduction Optimization view on mathematical models NLP models, black-box versus explicit expression 3
 Contents Preface ix 1 Introduction 1 1.1 Optimization view on mathematical models 1 1.2 NLP models, black-box versus explicit expression 3 2 Mathematical modeling, cases 7 2.1 Introduction 7 2.2 Enclosing
Contents Preface ix 1 Introduction 1 1.1 Optimization view on mathematical models 1 1.2 NLP models, black-box versus explicit expression 3 2 Mathematical modeling, cases 7 2.1 Introduction 7 2.2 Enclosing
Part 3: Trust-region methods for unconstrained optimization. Nick Gould (RAL)
") Part 3: Trust-region methods for unconstrained optimization Nick Gould (RAL) minimize x IR n f(x) MSc course on nonlinear optimization UNCONSTRAINED MINIMIZATION minimize x IR n f(x) where the objective
Part 3: Trust-region methods for unconstrained optimization Nick Gould (RAL) minimize x IR n f(x) MSc course on nonlinear optimization UNCONSTRAINED MINIMIZATION minimize x IR n f(x) where the objective
Optimization for neural networks
 0 - : Optimization for neural networks Prof. J.C. Kao, UCLA Optimization for neural networks We previously introduced the principle of gradient descent. Now we will discuss specific modifications we make
0 - : Optimization for neural networks Prof. J.C. Kao, UCLA Optimization for neural networks We previously introduced the principle of gradient descent. Now we will discuss specific modifications we make
Gradient Descent. Sargur Srihari
 Gradient Descent Sargur srihari@cedar.buffalo.edu 1 Topics Simple Gradient Descent/Ascent Difficulties with Simple Gradient Descent Line Search Brent s Method Conjugate Gradient Descent Weight vectors
Gradient Descent Sargur srihari@cedar.buffalo.edu 1 Topics Simple Gradient Descent/Ascent Difficulties with Simple Gradient Descent Line Search Brent s Method Conjugate Gradient Descent Weight vectors
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 2 3.2 Systems of Equations 3.3 Nonlinear and Constrained Optimization 1 Outline 3.2 Systems of Equations 3.3 Nonlinear and Constrained Optimization Summary 2 Outline 3.2
Chapter 3 Numerical Methods Part 2 3.2 Systems of Equations 3.3 Nonlinear and Constrained Optimization 1 Outline 3.2 Systems of Equations 3.3 Nonlinear and Constrained Optimization Summary 2 Outline 3.2
AM 205: lecture 18. Last time: optimization methods Today: conditions for optimality
 AM 205: lecture 18 Last time: optimization methods Today: conditions for optimality Existence of Global Minimum For example: f (x, y) = x 2 + y 2 is coercive on R 2 (global min. at (0, 0)) f (x) = x 3
AM 205: lecture 18 Last time: optimization methods Today: conditions for optimality Existence of Global Minimum For example: f (x, y) = x 2 + y 2 is coercive on R 2 (global min. at (0, 0)) f (x) = x 3
Introduction to Black-Box Optimization in Continuous Search Spaces. Definitions, Examples, Difficulties
 1 Introduction to Black-Box Optimization in Continuous Search Spaces Definitions, Examples, Difficulties Tutorial: Evolution Strategies and CMA-ES (Covariance Matrix Adaptation) Anne Auger & Nikolaus Hansen
1 Introduction to Black-Box Optimization in Continuous Search Spaces Definitions, Examples, Difficulties Tutorial: Evolution Strategies and CMA-ES (Covariance Matrix Adaptation) Anne Auger & Nikolaus Hansen
Data Mining (Mineria de Dades)
") Data Mining (Mineria de Dades) Lluís A. Belanche belanche@lsi.upc.edu Soft Computing Research Group Dept. de Llenguatges i Sistemes Informàtics (Software department) Universitat Politècnica de Catalunya
Data Mining (Mineria de Dades) Lluís A. Belanche belanche@lsi.upc.edu Soft Computing Research Group Dept. de Llenguatges i Sistemes Informàtics (Software department) Universitat Politècnica de Catalunya
Optimization Concepts and Applications in Engineering
 Optimization Concepts and Applications in Engineering Ashok D. Belegundu, Ph.D. Department of Mechanical Engineering The Pennsylvania State University University Park, Pennsylvania Tirupathi R. Chandrupatia,
Optimization Concepts and Applications in Engineering Ashok D. Belegundu, Ph.D. Department of Mechanical Engineering The Pennsylvania State University University Park, Pennsylvania Tirupathi R. Chandrupatia,
Review of Classical Optimization
 Part II Review of Classical Optimization Multidisciplinary Design Optimization of Aircrafts 51 2 Deterministic Methods 2.1 One-Dimensional Unconstrained Minimization 2.1.1 Motivation Most practical optimization
Part II Review of Classical Optimization Multidisciplinary Design Optimization of Aircrafts 51 2 Deterministic Methods 2.1 One-Dimensional Unconstrained Minimization 2.1.1 Motivation Most practical optimization
Discussion of Maximization by Parts in Likelihood Inference
 Discussion of Maximization by Parts in Likelihood Inference David Ruppert School of Operations Research & Industrial Engineering, 225 Rhodes Hall, Cornell University, Ithaca, NY 4853 email: dr24@cornell.edu
Discussion of Maximization by Parts in Likelihood Inference David Ruppert School of Operations Research & Industrial Engineering, 225 Rhodes Hall, Cornell University, Ithaca, NY 4853 email: dr24@cornell.edu
Topic 8c Multi Variable Optimization
 Course Instructor Dr. Raymond C. Rumpf Office: A 337 Phone: (915) 747 6958 E Mail: rcrumpf@utep.edu Topic 8c Multi Variable Optimization EE 4386/5301 Computational Methods in EE Outline Mathematical Preliminaries
Course Instructor Dr. Raymond C. Rumpf Office: A 337 Phone: (915) 747 6958 E Mail: rcrumpf@utep.edu Topic 8c Multi Variable Optimization EE 4386/5301 Computational Methods in EE Outline Mathematical Preliminaries
Lecture 17: Numerical Optimization October 2014
 Lecture 17: Numerical Optimization 36-350 22 October 2014 Agenda Basics of optimization Gradient descent Newton s method Curve-fitting R: optim, nls Reading: Recipes 13.1 and 13.2 in The R Cookbook Optional
Lecture 17: Numerical Optimization 36-350 22 October 2014 Agenda Basics of optimization Gradient descent Newton s method Curve-fitting R: optim, nls Reading: Recipes 13.1 and 13.2 in The R Cookbook Optional
2. Quasi-Newton methods
 L. Vandenberghe EE236C (Spring 2016) 2. Quasi-Newton methods variable metric methods quasi-newton methods BFGS update limited-memory quasi-newton methods 2-1 Newton method for unconstrained minimization
L. Vandenberghe EE236C (Spring 2016) 2. Quasi-Newton methods variable metric methods quasi-newton methods BFGS update limited-memory quasi-newton methods 2-1 Newton method for unconstrained minimization
434 CHAP. 8 NUMERICAL OPTIMIZATION. Powell's Method. Powell s Method
 434 CHAP. 8 NUMERICAL OPTIMIZATION Powell's Method Powell s Method Let X be an initial guess at the location of the minimum of the function z = f (x, x 2,...,x N ). Assume that the partial derivatives
434 CHAP. 8 NUMERICAL OPTIMIZATION Powell's Method Powell s Method Let X be an initial guess at the location of the minimum of the function z = f (x, x 2,...,x N ). Assume that the partial derivatives
Numerical Optimization: Basic Concepts and Algorithms
 May 27th 2015 Numerical Optimization: Basic Concepts and Algorithms R. Duvigneau R. Duvigneau - Numerical Optimization: Basic Concepts and Algorithms 1 Outline Some basic concepts in optimization Some
May 27th 2015 Numerical Optimization: Basic Concepts and Algorithms R. Duvigneau R. Duvigneau - Numerical Optimization: Basic Concepts and Algorithms 1 Outline Some basic concepts in optimization Some
A projected Hessian for full waveform inversion
 CWP-679 A projected Hessian for full waveform inversion Yong Ma & Dave Hale Center for Wave Phenomena, Colorado School of Mines, Golden, CO 80401, USA (c) Figure 1. Update directions for one iteration
CWP-679 A projected Hessian for full waveform inversion Yong Ma & Dave Hale Center for Wave Phenomena, Colorado School of Mines, Golden, CO 80401, USA (c) Figure 1. Update directions for one iteration