EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
|
|
|
- Winifred Bond
- 5 years ago
- Views:
Transcription
1 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science
2 Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation is related to the first omitted term There are several forms for the error
3 ( n) f ''( a) 2 f ( a) n f ( x) = f( a) + f '( a)( x- a) + ( x- a) + + ( x- a) + R 2! n! x n ( x-t) ( n+ 1) Rn = f () t dt R= ò a n! ( x-a) ( n + 1)! n+ 1 f ( n+ 1) ( x) n ( n) f ''( x) 2 f ( x) n f ( x+ h) = f( x) + f '( x) h+ h + + h + R 2! n! n+ 1 h ( n+ 1) R= f ( x) ( n + 1)! n
4 Series Truncation Error In general, the more terms in a Taylor series, the smaller the error In general, the smaller the step size h, the smaller the error Error is O(h n+1 ), so halving the step size should result in a reduction of error that is on the order of 2 n+1 In general the smoother the function the smaller the error
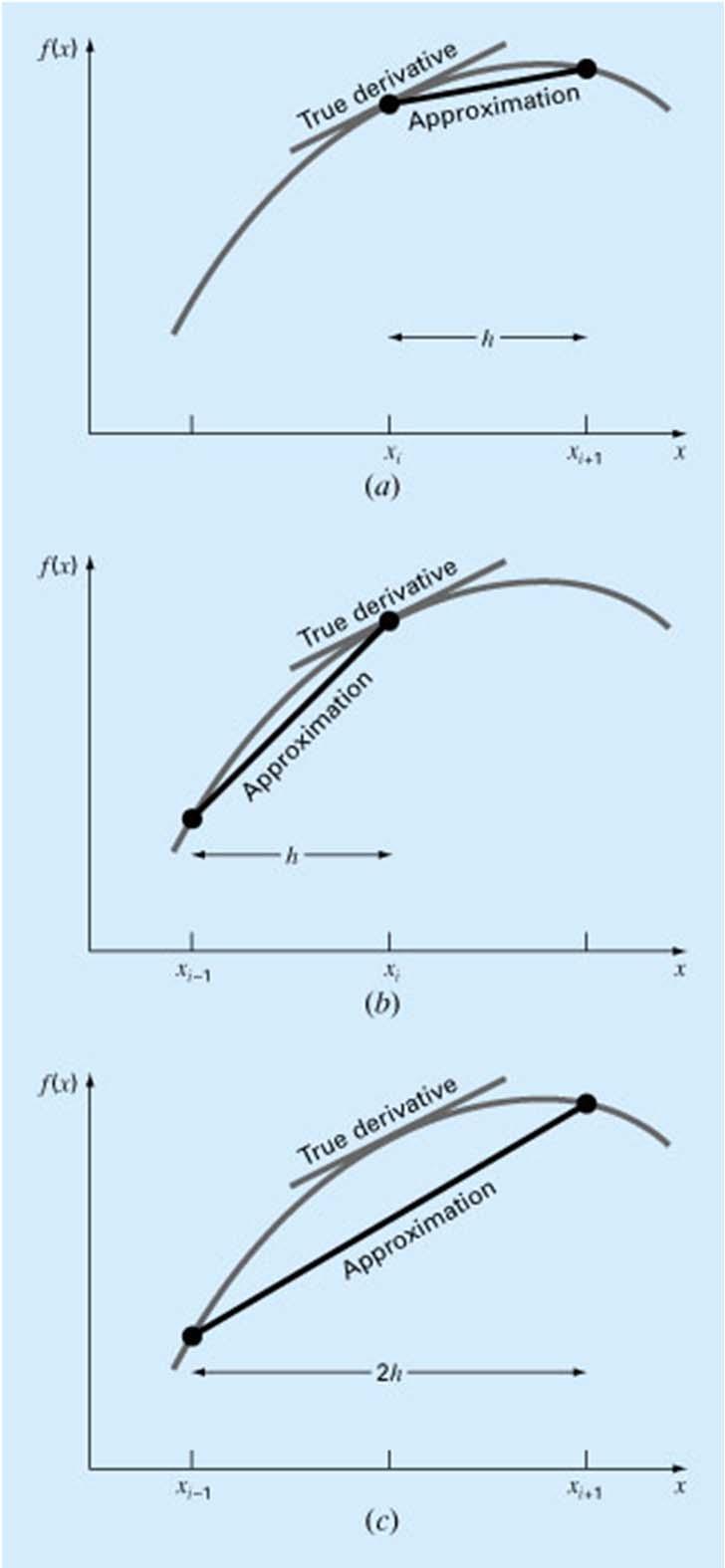
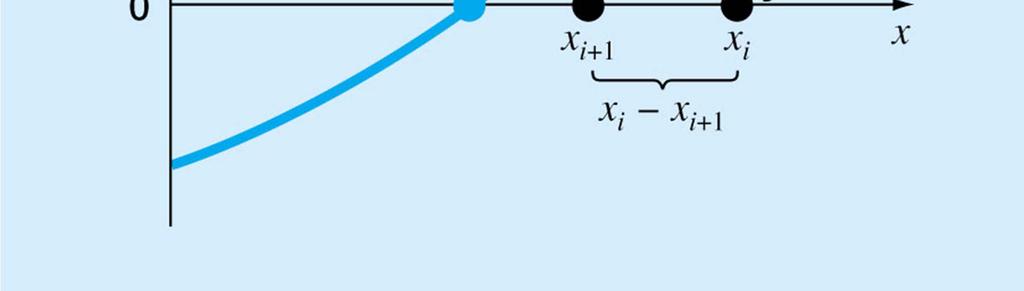
5 Numerical Differentiation f ( xi+ 1) = f( xi) + f '( xi)( xi+ 1- xi) + Oé êë ( xi+ 1-xi) f '( xi)( xi+ 1- xi) = f( xi+ 1) - f( xi) + Oé êë ( xi+ 1-xi) f( x )- f( x ) f x Oé x x ù û i+ 1 i '( i) = + ( i+ 1 - i) ( xi+ 1 - xi) ë Dfi f '( xi ) = + O( h) h 2 2 ù úû ù úû First Forward Difference
6 f ( x ) = f( x )- f '( x ) h+ O( h ) i-1 i i f( x )- f( x ) f '( x ) = i i-1 + O( h) i h f f '( x ) = i + O( h) i h 2 First Backward Difference
7 i+ 1 i i i i-1 i i i i+ 1 i-1 i i+ 1 i-1 i f ( x ) = f ( x ) + f '( x ) h+ 0.5 f ''( x ) h + O( h ) 2 3 f ( x ) = f ( x )- f '( x ) h+ 0.5 f ''( x ) h + O( h ) f( x )- f( x ) = 2 f '( x ) h+ O( h ) f( x ) = f( x ) + 2 f '( x ) h+ O( h ) f( x )- f( x ) f '( x ) = i+ 1 i-1 + O( h 2 ) i 2h First Centered Difference
8
9 Second Forward Difference f x f x h h f x f x ''( i) D ( i) / = D ( i+ 1) - ( i) ( ) f x h é êë f x f x f x f x -2 f ''( xi) h éf( xi+ 2) - 2 f( xi+ 1) + f( xi) ù ë û -2 ''( i) ( i+ 2) - ( i+ 1) - ( i+ 1) - ( i) ( ) ( ) ù úû
10 Propagation of Error Suppose that we have an approximation of the quantity x, and we then transform the value of x by a function f(x). How is the error in f(x) related to the error in x? How can we determine this if f is a function of several inputs?
11 x x x = x+ e f ''( x) f( x ) = f( x) + f '( x) e+ e 2 + 2! f( x )- f( x) = f '( x) e If the error is bounded e < B f( x )- f( x) < f '( x) B If the error is random with standard deviation SD( x ) = s s SD( f ( x )) f '( x) s
12 x x x = x + e x x x = x + e f( x, x ) = f( x, x ) + f ( x, x ) e + f ( x, x ) e f( x, x )- f( x, x ) f ( x, x ) e + f ( x, x ) e If the errors are bounded e i < B i f( x, x ) f( x, x ) f ( x, x ) B f ( x, x < ) B2
13 Stability and Condition If small changes in the input produce large changes in the answer, the problem is said to be ill conditioned or unstable Numerical methods should be able to cope with ill conditioned problems Naïve methods may not meet this requirement
14 x = x+ e The error of the input is e. e/ x e/ x is the relative error of the input. The error of the output is f( x )- f( x) e f '( x) and the relative error of the output is ef '( x) ef '( x ) f( x) f( x ) The ratio of the output RE to the input RE is e f '( x) xf '( x) xf '( x ) = ( e / x) f( x) f( x) f( x )
15 Bracketing Methods Find two points x L and x U so that f(x L ) and f(x U ) have opposite signs If f() is continuous, there must be at least one root in the interval Bracketing methods take this information, and produce successive approximations to the solution by narrowing the interval bracketing a/the root
16 Behavior of Roots of Continuous Functions If the function values at two points have the same sign, then the number of roots between them is even, including possibly 0. If the function values at two points have different signs, then the number of roots between them is odd, so cannot be 0.
17 Exceptions Roots of multiplicity greater than one, count as multiple roots in this. The function f( x) ( x 1) 2 has only one root at x = 1, even though the function does not change sign in the interval from 0 to 2. Discontinuous functions need not obey the rules.
18 Bisection Method Suppose a continuous function changes sign between x L and x U. Consider x M =(x L + x U )/2 If f(x M ) = 0, we have found a root. If f(x M ) is not zero, it differs in sign from exactly one of the end points This gives a new interval of half the length which must contain a root
19 Error Estimate for Bisection Interval at start of step i is 2 x, the distance between the upper and lower bounds. We pick the middle of this interval as the i th guess The next interval has length x, has one end on the previous guess, and the other at one end or the other of the previous interval
20 At step i the error cannot be greater than x and at step i+1 it cannot be greater than x/2 The distance between the best guess at step i and the best guess at the next step is exactly x/2 Thus, the error bound is the change in the best guess
21 Function Evaluations In some applications, evaluation of the function to be minimized is expensive and may itself involve a large computation In n iterations, the naive implementation uses 2n function evaluations. The implementation that saves and reuses function values uses n + 1 function evaluations
22 In n iterations, the first implementation uses 2n function evaluations. The second implementation use n + 1 function evaluations Neither implementation contains a check that the function actually does change sign in the input interval
23 Summary of Bisection The method is slow but sure for continuous functions There is a well-defined error bound, though the true error may be much less
24 Method of False Position Also called linear interpolation or regula falsi. Bisection uses information that there is a root in the interval x L to x U but does not use any information from the function values f(x L ) and f(x U ). False position uses the insight that if f(x L ) is smaller than f(x U ), one would expect the root to lie closer to x L.
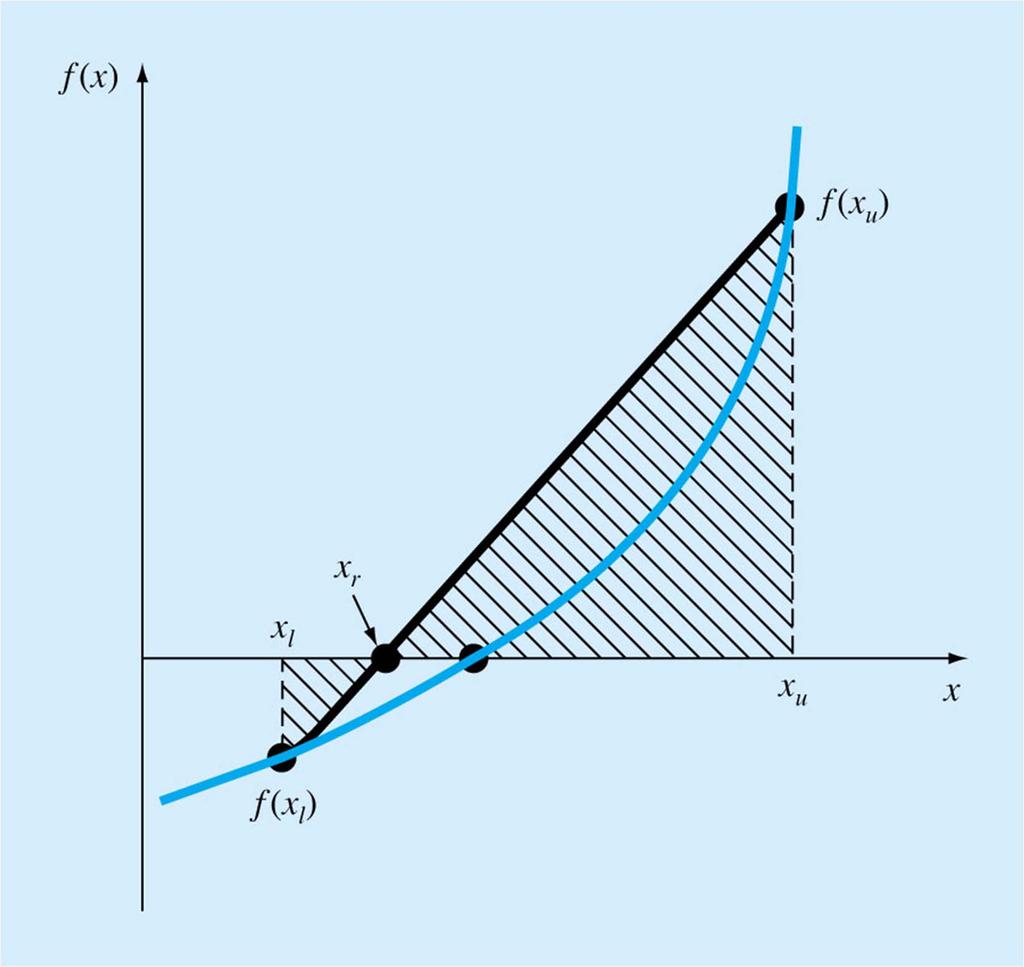
25 Fig 5.12
26 The line through the two end points of the interval is f( x )- f( x ) y- f( xu) = x-x x - x ( ) L U ( ) This intersects the x axis where x satisfies f( xl) - f( xu) - f( xu) = x-x x - x ( ) x L ( ) xl- xu x- xu =- f( xu) f( x )- f( x ) R = x - U L L U U f( xu)( xl- xu) f ( x )- f( x ) L U U U U
27 The new root estimate x R replaces whichever of the end points that has the same sign as f(x R ), so that the two new endpoint still bracket the root. We use as an error estimate, the change in the best root estimate from one iteration to the next. This works well to the extent that the function is nearly linear in the interval and near the root.
28 Pitfalls of False Position If the function is very nonlinear in the bracketing interval, convergence can be very slow, and the approximate error estimate can be very poor. A possible solution is to use bisection until the function appears nearly linear, then switch to false position for faster convergence, or to use false position, but switch to bisection if convergence is slow. Another is to adjust a fixed endpoint
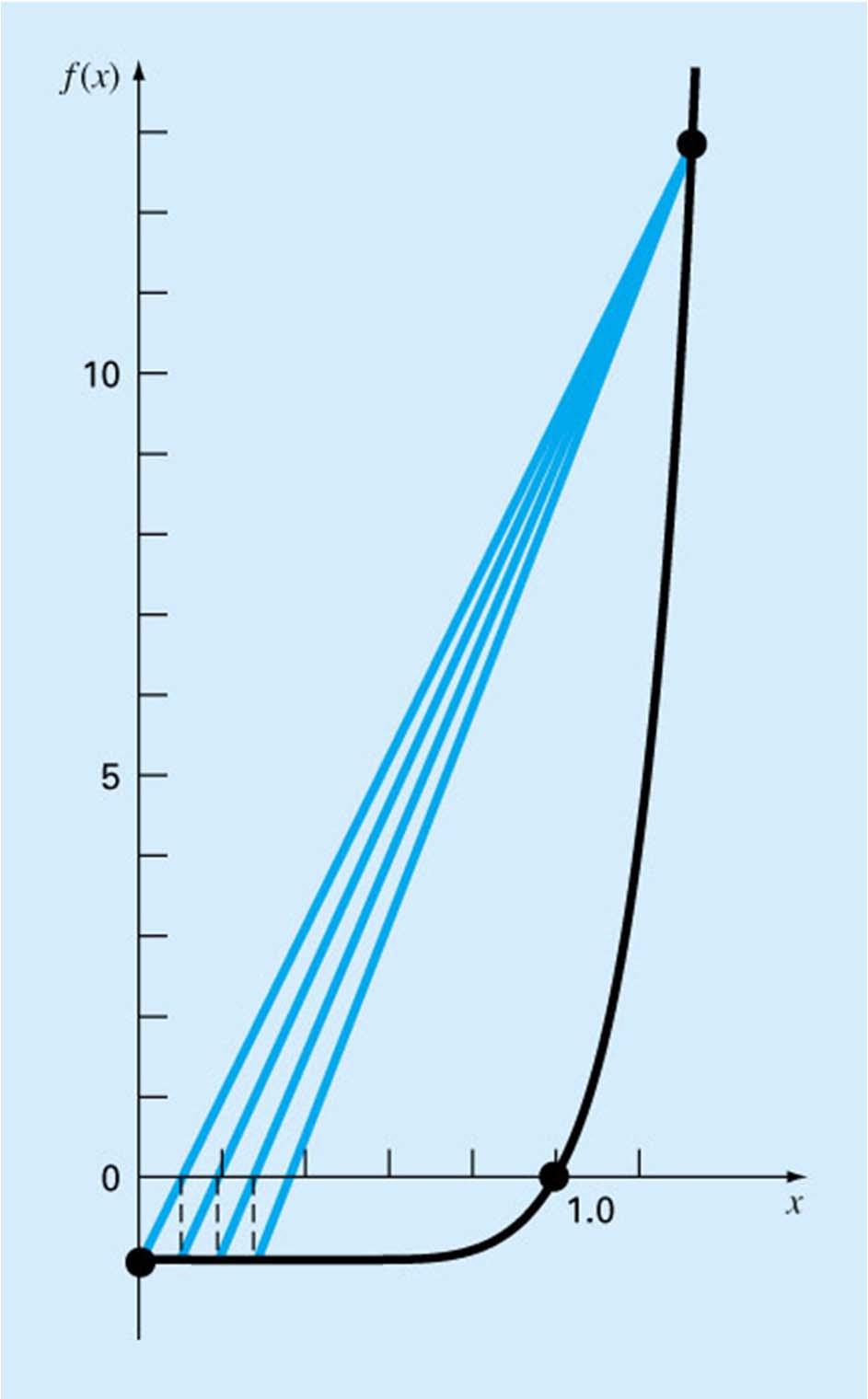
29 Fig 5.14
30 Results of Modified False Position With the function x 10 1 and starting points 0 and 1.3, bisection takes 14 iterations to achieve a relative error of = 0.01%. False Position takes 39 iterations. The modifications of false position take 12 iterations each.
31 Modified False Position
32 Modified False Position
33 Open Methods of Root Finding Bracketing methods begin with an interval that is known to contain at least one root. These methods are guaranteed to find a root eventually, though they may be slow. Open methods begin only with a point guess. They are not guaranteed to converge, but may be much faster.
34 When does a fixed-point iteration converge? Solve gx ( )- x= 0 x x i+ 1 r = = g( x ) i g( x ) r x - x = g( x )-g( x ) r i+ 1 r i
35 x- x = gx ( )-gx ( ) r i+ 1 r i gx ( r) - gx ( i) g '( x) = (Derivative Mean Value Thm) x - x ( x - x ) g'( x) = g( x )-g( x ) x - x = ( x -x ) g'( x) E r i+ 1 r i ti, + 1 ti, r r i r i = E g'( x) i Thus the error at iteration i+1 is smaller than the error at iteration i so long as the derivative is less than 1 in absolute value in a neighborhood of the root. Linearly convergent with constant c bounded by the maximum derivative of g().
36 Newton-Raphson Beginning with a point, its function value and its derivative, derive a new guess Project the tangent line until it intersects the x-axis Approximate the function by a first order Taylor series, and solve the approximate problem exactly
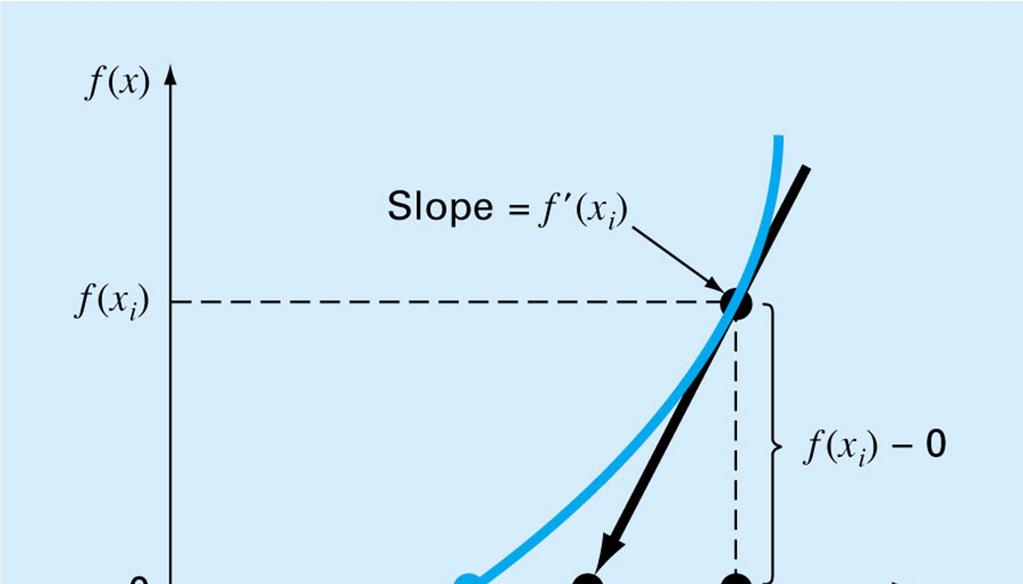
37 Fig 6.5
38 f( x) f( x ) + f '( x )( x- x ) = 0 i i i f '( x )( x- x ) =-f( x ) i i i x- x =-f( x )/ f '( x ) i i i x= x - f( x )/ f '( x ) i i i
39 Error Analysis Newton-Raphson appears to converge quadratically, so that E i+1 = c E 2 i This convergence is extremely rapid, and occurs under modest conditions once the iterate is close to the solution.
40 The exact Taylor series expansion of f( x) f( x ) = 0 = f( x ) + f '( x )( x - x ) f ''( x)( x -x ) The Newton-Raphson iteration is based on the truncated series f( x) = f( x ) + f '( x )( x-x ) leading to the iteration x i+ 1 r i i r i r i = x - i i i f( x )/ f '( x ) i i i or 0 = f( x ) + f '( x )( x -x ) i i i+ 1 i 0 = f '( x )( x - x ) f ''( x)( x -x ) i r i+ 1 r i 2 2
41 0 = f '( x )( x - x ) f ''( x)( x -x ) i r i+ 1 r i 0 = f '( x ) E f ''( x) E E =- 2 i t, i+ 1 t, i f ''( x) E 2 ti, + 1 ti, 2 f '( xi ) 2
42 Pitfalls of Newton-Raphson When close to a solution, and when the conditions are satisfied (e.g., f (x r ) is not 0), Newton-Raphson converges rapidly. When started farther away, it may diverge or converge slowly at first. The quadratic convergence applies only once the solution is close.
43 Safeguards for Newton-Raphson On each iteration, one can keep track of f(x). If the new proposed iterate has a larger value of this quantity, then replace it by a step half as big. The same trick can be used for keeping the iterations away from undesirable regions (non-positive numbers for the log function). One can simply return a very large number instead of NaN.
44 The Secant Method For some functions, it is difficult to calculate the derivative We can use a backward difference to approximate the derivative, and then use a Newton-Raphson type calculation This is called the secant method
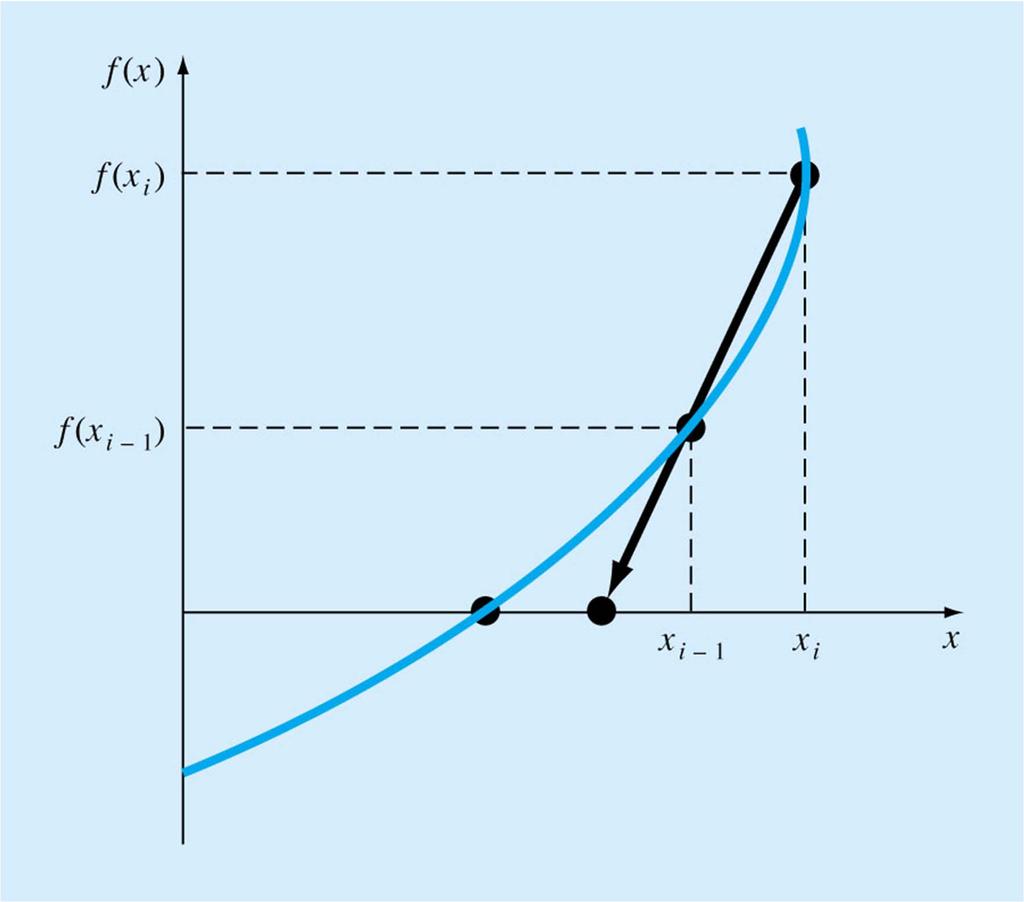
45 Fig 6.7
46 f( xi- 1) - f( xi) f '( xi ) xi- 1 - xi f ( x ) f ( x )( x - x ) x = x - x - '( ) ( ) ( ) i i i-1 i i+ 1 i i f xi f xi- 1 - f xi The secant method is similar to Newton- Raphson It appears similar to false position, but this is not the case.
47 Multiple Roots Multiple roots are places where the function and one or more derivatives are zero. This is most easily explained for polynomials. Non-polynomials can exhibit the same phenomenon
48 f( x) = ( x-1)( x-2) 2 '( ) ( 2) 2( 1)( 2) 2 has a simple root at x= 1 and a double root at x= 2 f x = x- + x- x- f '(2) = 0 f '(1) ¹ 0 f( x) = ( x-1)( x-2) has a triple root at x = 2 3
49 Multiple roots cause potential trouble for all methods of root finding Bracketing methods may not work if there is an even multiple root in which the function does not cross the axis. An interval in which a continuous function changes sign has at least one root. An interval in which a continuous function does not change sign may or may not have a root Newton-Raphson and secant methods divide by f () which is difficult if it is 0.
50 Solution of multiple linear equations One linear equation Algebra One nonlinear equation Bracketing or open methods Multiple linear equations This chapter Multiple nonlinear equations Open methods mostly
51 Fig PT3.4
52 Matrix representation of linear equations a x + a x + + a x = b n n 1 a x + a x + + a x = b n n 2 a x + a x + + a x = b n1 1 n2 2 nn n n éa a a ùéx ù éb ù n 1 1 úê a21 a22 a úê 2n x 2 b ê úê ú ê 2ú úê = úê êa a a úêx ú êb ú ë n1 n2 nnûë nû ë nû
53 Singularity and the determinant A square matrix is singular if one row can be made up from the other rows by adding and multiplying by constants Equivalent for columns The determinant is 0 for singular matrices, and is a quantitative measure of singularity if not 0
54 Ax = b has a unique solution exactly when A ¹ 0 ( A is nonsingular) If A is singular, either the equation has no solutions or it has many. x+ 2y= 4 x- y= 1 x= 2 y= 1 2x- 2y= 4 x- y= 2 any values such that y= x-2 2x- 2y= 4 x- y= 3 No solution!
55 Gaussian Elimination Manipulate original matrix and vector to eliminate variables Back-substitute to solve equations In most straightforward form, can be subject to problems if certain matrix entries are 0 or small This in turn can be fixed by pivoting
56 a x + a x + + a x = b n n 1 a x + a x + + a x = b n n 2 a x + a x + + a x = b n1 1 n2 2 nn n n éa a a b a a a b êë a a a b n n 2 n1 n2 nn n ù úû
57 a x + a x + + a x = b n n 1 a x + a x + + a x n n -[ a x + ( a a / a ) x + + ( a a / a ) x ] = b -ba / a n n ( a - a a / a ) x + + ( a -a a / a ) x n 1n n = b -ba / a éa11 a12 a 1n 0 a -a a / a a -a a / a êë an 1 an2 ann n 1n b 1 b -ba / a b n ù úû
58 a x + a x + a x + a x = b a x + a x + a x + a x = b a x + a x + a x + a x = b a x + a x + a x + a x = b
59 a x + a x + a x + a x = b ( a - a a / a ) x + ( a - a a / a ) x + ( a - a a / a ) x = b -ba / a ) ( a - a a / a ) x + ( a - a a / a ) x + ( a - a a / a ) x = b -ba / a ) ( a42 - a12a21 / a11) x2 + ( a43 -a13a21 / a11 ) x3+ ( a44- a14a21/ a11) x4 = b4-ba 1 21/ a11) a x + a x + a x + a x = b a x + a x + a x = b a x + a x + a x = b a x + a x + a x = b a x + a x + a x + a x = b a x + a x + a x = b a 33x3 + a 34x4 = b 3 a x = b
60 a x + a x + a x + a x = b a x + a x + a x = b a x + a x = b a x = b x = b / a a x = b -a x a x = b -a b / a x = b / a -a b / a a a x = b - a x + a x a 22x2 = b 2 -a 23( b 3 / a 33 - a 34b 4 / a 33a 44) + a 24( b 4 / a 44) x = b / a -a b / a a - a a b / a a a + a b / a a
61 Operation Counting Multiplication and division take far longer than addition and subtraction The inner loop of forward elimination requires 1 floating point operation = FLOP This loop is executed n - k +1 times in the middle loop, with one additional multiplication and one additional division, for n k +3 FLOPs. That whole loop is executed n k times This is done for k from 1 to n - 1
62 n-1 å FLOPS = ( n-k)( n- k+ 3) k= 1 n-1 å = ( m)( m+ 3) m= 1 n-1 n-1 2 å = m + 3 å m= 1 m= 1 1 = ( n- 1)( n )(2 n- 1) + 3( n- 1) n / = n /3 + O( n ) m
63 The inner loop of back substitution requires 1 FLOP This loop is executed n i times There is one additional division This is done as i goes from n 1 to 1 Total number of FLOPS is
64 FLOPS = n- i+ 1 1 å i= n-1 n-1 å = m + 1 m= 1 = ( n- 1)( n)/2 + ( n-1) 2 = n /2 + O( n)
65 Pitfalls of Gaussian Elimination The algorithm may ask to divide by 0 The algorithm may ask to divide by a small, not very accurate number Round-off error can accumulate in the later steps of the elimination/substitution cycle Ill-conditioned systems cause trouble
66 Improvements in accuracy Use more significant figures (really, always use double precision for matrix calculations Avoid zero or small pivots by partial pivoting, which is swapping equations until the pivot is large not small. Adjusting the scale of the variables so that the coefficients are about the same magnitude; e.g., adjust equations so the maximum (LHS) coefficient in each is 1.
67 Matrix Decomposition Methods Matrix decomposition or matrix factoring is a powerful approach to the solution of matrix problems. The LU decomposition takes a square matrix A and writes it as the product of a lower triangular matrix L and an upper triangular matrix U A = LU
68 The LU Decomposition The LU decomposition is used to solve linear equations. It is essentially equivalent to Gaussian elimination when only one linear system is being solved If we want to solve Ax = b for one matrix A and many RHS s b, then the LU decomposition is the method of choice
69 LU and Gaussian Elimination Solve Ax = b Suppose that A can be written as A = LU, the product of a lower and an upper triangular matrix. To solve LUx = b First solve Ly = b where y will later be Ux.
70 Ax = b LUx = b LUx ( ) = b Ly Ux = = b y
71 The LU decomposition thus is derivable from Gaussian elimination The upper triangular matrix U is the set of coefficients of the matrix after elimination The lower triangular matrix is the set of factors used to perform the elimination, with 1 s on the main diagonal In general, pivoting is necessary to make this reliable
72 Pivoting The naïve version of the LU algorithm uses equation 1 for variable 1, equation 2 for variable 2, etc., just as the naïve version of Gaussian elimination Partial Pivoting uses the equation with the largest coefficient for variable 1 to eliminate variable 1, the equation of the remaining with the largest coefficient of variable 2 to eliminate variable 2, etc.
73 One way to do partial pivoting is to maintain an array order() of dimension n, which contains the list of the order in which equations are processed Anytime the index k refers to an equation, we substitute order(k) On each major iteration, the new kth element of order() is set to be the equation number not already used that has the largest coefficient in absolute value
74 Computational Effort Total effort to solve one set of linear equations Ax=b by LU is the same as Gaussian elimination This is O(n 3 ) for the LU decomposition and O(n 2 ) for the substitution To solve many sets of equation with the same LHS is much less effort Ax = b 1 Ax = b 2 Ax = b 3
75 The Matrix Inverse The matrix I which has 1 s on the diagonal and zeros elsewhere has the property AI =IA =A for any n by n matrix A If A is an n by n matrix, then the matrix inverse A -1 is another n by n matrix such that (if it exists) A A -1 = A -1 A = I
76 This turns out to be easy for upper and lower triangular matrices If A = LU, and if L -1 and U -1 are the respective inverses, then U -1 L -1 = A -1 because AU -1 L -1 = LUU -1 L -1 = I In general, matrix inverses are not needed; rather solution of linear equations. There are exceptions, though.
77 Matrix Norms and Condition A Norm is a measure of the size of some object Euclidean norm in the plane is = ( x, x ) x x { a } ij n n = åå i= 1 j= 1 a 2 ij
78 Condition Number One definition of the condition number of a matrix A is A A -1 Another definition is the ratio of the largest to the smallest eigenvalue Large condition number means instability of the solution of linear equations
79 Iterative Refinement If one has an approximate solution to a set of linear equations, then a more nearly exact solution can be derived by iterative refinement This can be used when there are conditioning problems, though (as always) double precision is advisable
80 a x + a x + a x = b a x + a x + a x = b a x + a x + a x = b a11x 1 + a12x 2 + a13x 3 = b 1 a x + a x + a x = b a x + a x + a x = b x = x +Dx x = x +Dx x = x +Dx 3 3 3
81 a11d x1 + a12d x2 + a13d x3 = b1 - b 1 = E1 a D x + a D x + a D x = b - b = E a D x + a D x + a D x = b - b = E Solve these equations for correction factor Add correction factors to approximate solution Especially handy with LU method because the LHS is the same at each step
82 Gauss-Seidel Instead of direct solution methods like Gaussian elimination or the LU method, one can use iterative methods Often good for very large, sparse systems May or may not converge; requires matrix to be diagonally dominant
83 a x + a x + a x = b a x + a x + a x = b a x + a x + a x = b x = ( b - a x + a x )/ a x = ( b -a x -a x )/ a x = ( b - a x + a x )/ a
84 Convergence of Gauss-Seidel Gauss-Seidel converges only when the diagonal elements are much larger than the others (diagonally dominant) for each equation a ii n >å j= 1 j¹ i a ij
85 One-Dimensional Unconstrained Optimization Given a function f(x), find its maximum value (or its minimum value). We may not know how many maxima f() has. We need methods of finding local maxima. We need methods of attempting to find the global maximum, though this can be difficult.
86 Bracket Methods Suppose we have an interval that is thought to contain a single maximum of a function f(x), so that f(x) is increasing from the lower end to the maximum, and decreasing from the maximum to the upper end We want a method similar to bisection for solving this problem
87 Adding new points In bisection, we add one additional new point in the middle, and pick either the left or the right interval based on which one has the function changing sign This does not provide enough information for finding a maximum we will need at least two additional points for this
88 No maximum here
89 No maximum here No maximum here
90 No maximum here
91 No maximum here
92
93
94
95 x x - rx rx ( x rx) r x 1 r r r r 1 0 r 2 x rx r 2 x r r 2 x r
96 Importance of Number of Function Evaluations In small problems this does not matter Reduced function evaluations means faster performance This matters if a large number of optimizations needs to be performed This matters if one function evaluation is expensive in computation time
97 Error Analysis for Golden Section Search At the end of each iteration, we have an interval that is known to contain the optimum We analyze the case where the left-hand interval is discarded; the other case is symmetric Old points are x l, x 2, x 1, and x u New points are x 2, x 1, and x u, x 1 is guess
98 x x x rx ( x) [ x rx ( x)] 1 2 l u l u u l ( x x ) 2 r( x x ) u l u l (2r 1)( x x ) u l.236( x x ) u l x x x [ x r( x x )] u 1 u l u l (1 r)( x x ) u l.382( x x ) u l
99 Quadratic Interpolation If golden section search is analogous to bisection, then the equivalent of linear interpolation (false position) is quadratic interpolation We approximate the function over the interval by a quadratic (parabola), and solve the quadratic Requires three points instead of two
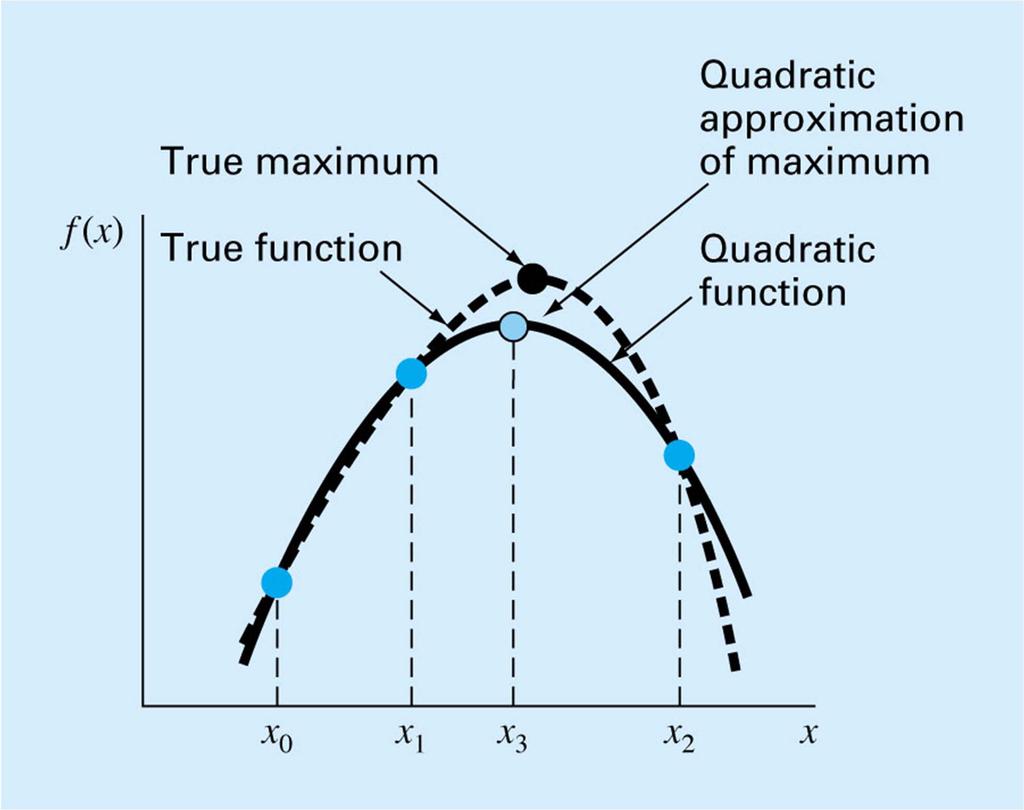
100 Fig 13.6
101 Given three points find the quadratic joining them ( x, f( x )) 0 0 ( x, f( x )) 1 1 ( x, f( x )) 2 2 f ( x) ax bx c f ( x ) ax bx c f ( x ) ax bx c f ( x ) ax bx c
102 f( x ) ax bx c f( x ) ax bx c f( x ) ax bx c x x 1 a f( x ) x x 1 b f( x ) x x 1 c f( x )
103 x f( x0)( x1 x2) f( x1)( x2 x0) f( x2)( x0 x1) 2 f( x )( x x ) 2 f( x )( x x ) 2 f( x )( x x ) Initial endpoints are x 0 and x 2 Initial middle point is x 1 New middle point as guess for the optimum is x 3 Discard one of x 0 or x 3 using the same rule as golden section search Error estimate usually by change in estimate
104 Newton s Method Open rather than bracketing method, analogous to Newton-Raphson Also uses a quadratic model of the function Quadratic model is at a point not over an interval Optimum is when the derivative is 0 Use Newton-Raphson on the derivative
105 f ( x) f ( x ) f '( x )( x x ) 0.5 f ''( x )( x x ) f '( x) f '( x ) 0.5 f ''( x )2( x x ) f ''( x )( x x ) f '( x ) 0 f '( x ) f ''( x )( x x ) i i i ( x x ) f '( x ) / f ''( x ) i i i i i i i i i i i i i i x x f '( x ) / f ''( x ) i 1 i i i 2
106 Error behavior of optimization methods in dimension 1 Golden section search has linear convergence with ratio φ and an error bound Quadratic interpolation has linear convergence and an error estimate from change in the estimate Newton s method has quadratic convergence and an error estimate from change in the estimate
107 Pitfalls of Newton s Method Different starting points may lead to different solutions Iterations may diverge The former requires repeated search for the optimal optimum = global optimum The latter may require limiting step size, or requiring an increase in function value at each iteration
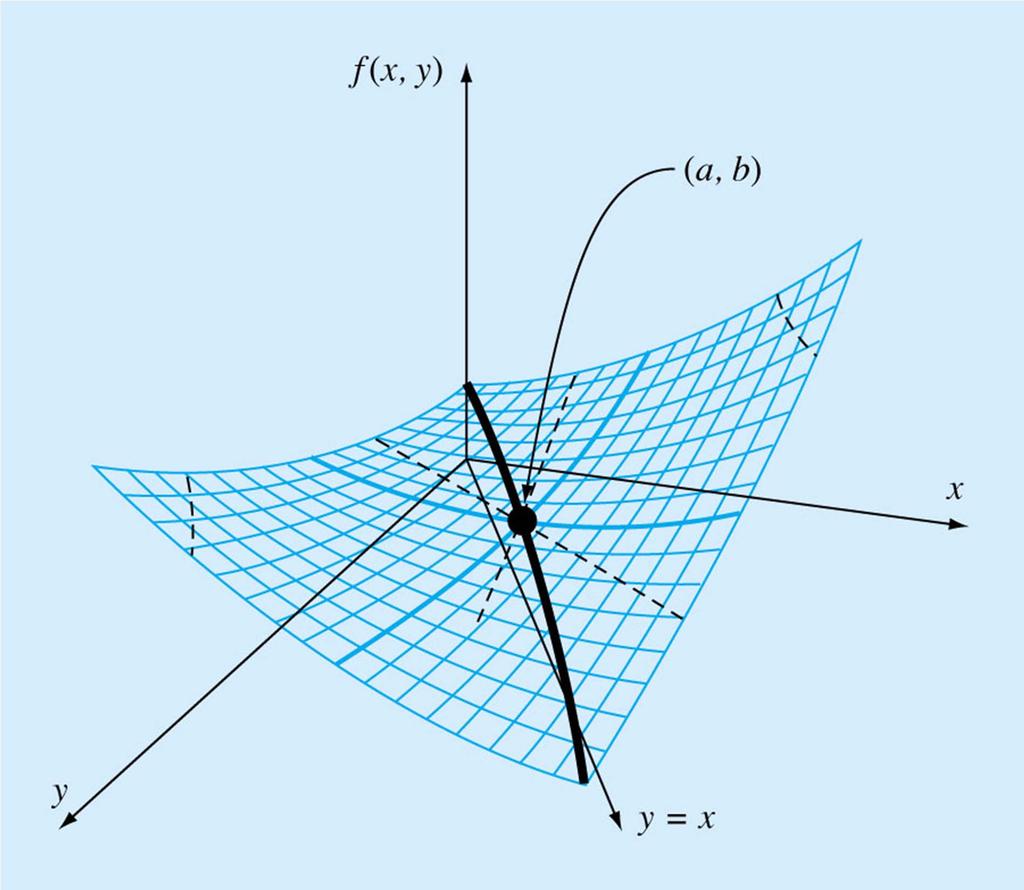
108 Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one variable f(x 1, x 2,, x n ) We want to find the values of x 1, x 2,, x n that give f() the largest (or smallest) possible value Graphical solution is not possible, but a graphical picture helps understanding Hilltops and contour maps
109 Methods of solution Direct or non-gradient methods do not require derivatives Grid search Random search One variable at a time Line searches and Powell s method Simplex optimization
110 Gradient methods use first and possibly second derivatives Gradient is the vector of first partials Hessian is the matrix of second partials Steepest ascent/descent Conjugate gradient Newton s method Quasi-Newton methods
111 Grid and Random Search Given a function and limits on each variable, generate a set of random points in the domain, and eventually choose the one with the largest function value Alternatively, divide the interval on each variable into small segments and check the function for all possible combinations
112 Features of Random and Grid Search Slow and inefficient Requires knowledge of domain Works even for discontinuous functions Poor in high dimension Grid search can be used iteratively, with progressively narrowing domains
113 Line searches Given a starting point and a direction, search for the maximum, or for a good next point, in that direction. Equivalent to one dimensional optimization, so can use Newton s method or another method from previous chapter Different methods use different directions
114 x v ( x, x,, x ) 1 2 ( v, v,, v ) 1 2 n n f ( x) f( x, x,, x ) 1 2 g( λ) f ( x λv) n
115 One-Variable-at-a Time Search Given a function f() of n variables, search in the direction in which only variable 1, changes Then search in the direction from that point in which only variable 2 changes, etc. Slow and inefficient in general Can speed up by searching in a direction after n changes (pattern direction)
116
117 Powell s Method If f() is quadratic, and if two points are found by line searches in the same direction from two different starting points, then the line joining the two ending points (a conjugate direction) heads toward the optimum Since many functions we encounter are approximately quadratic near the optimum, this can be effective
118
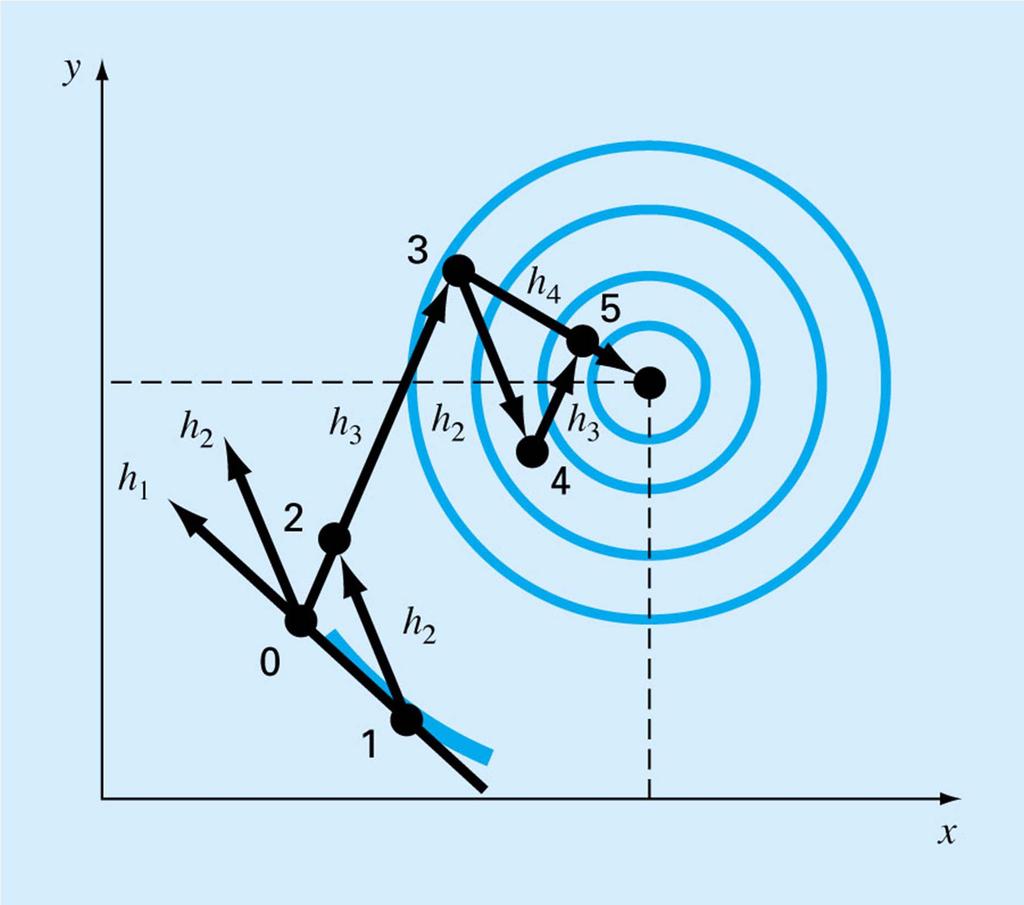
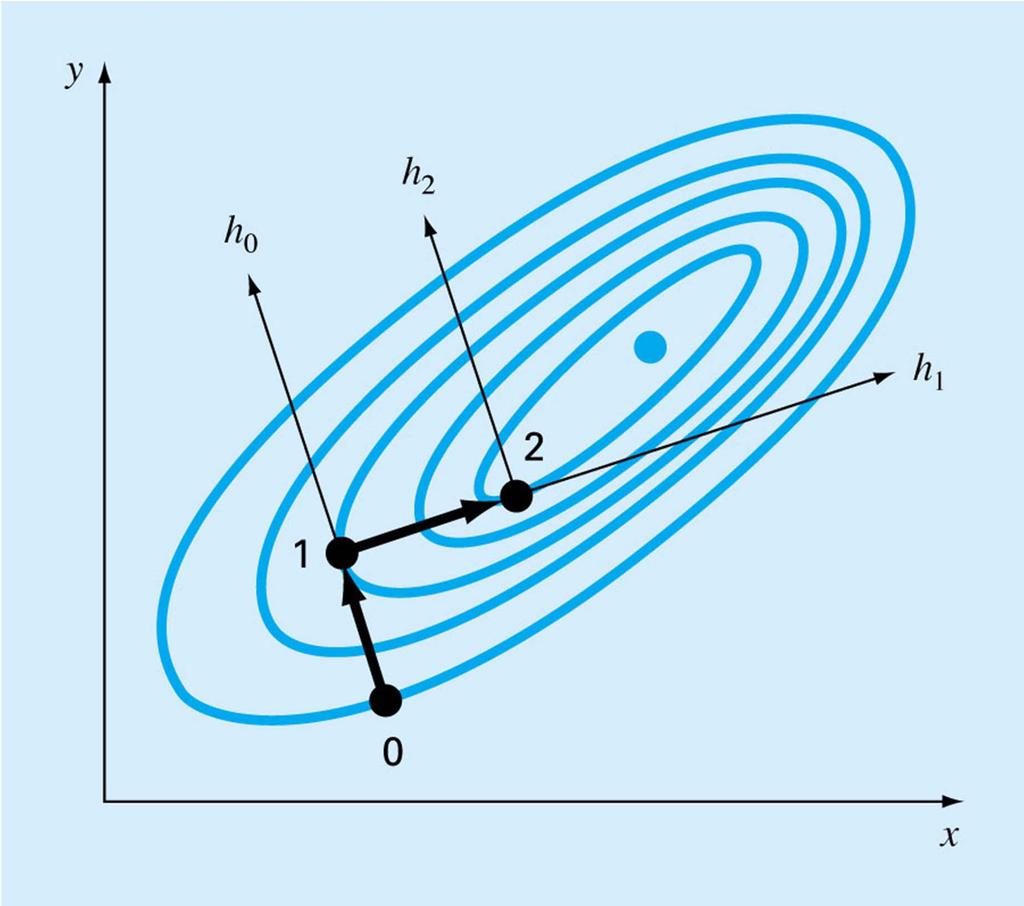
119 Start with a point x 0 and two random directions h 1 and h 2 Search in the direction of h 1 from x 0 to find a new point x 1 Search in the direction of h 2 from x 1 to find a new point x 2. Let h 3 be the direction joining x 0 to x 2 Search in the direction of h 3 from x 2 to find a new point x 3 Search in the direction of h 2 from x 3 to find a new point x 4 Search in the direction of h 3 from x 4 to find a new point x 5
120 Points x 3 and x 5 have been found by searching in the direction of h 3 from two starting points x 2 and x 4 Call the direction joining x 3 and x 5 h 4 Search in the direction of h 4 from x 5 to find a new point x 6 The new point x 6 will be exactly the optimum if f() is quadratic The iterations can then be repeated Errors estimated by change in x or in f()
121
122 Nelder-Mead Simplex Algorithm Direct search method that uses simplices, which are triangles in dimension 2, pyramids in dimension 3, etc. At each iteration a new point is added usually in the direction of the face of the simplex with largest function values
123
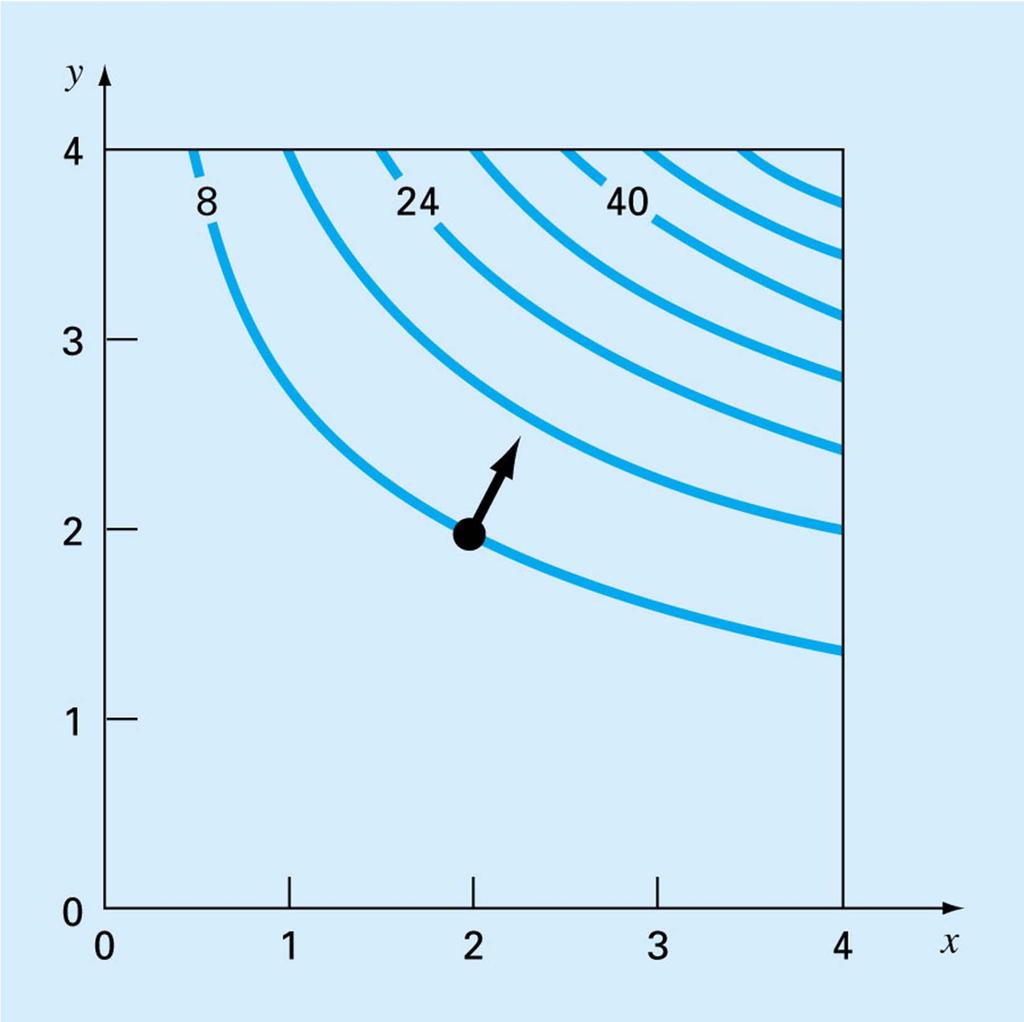
124 Gradient Methods The gradient of f() at a point x is the vector of partial derivatives of the function f() at x For smooth functions, the gradient is zero at an optimum, but may also be zero at a non-optimum The gradient points uphill The gradient is orthogonal to the contour lines of a function at a point
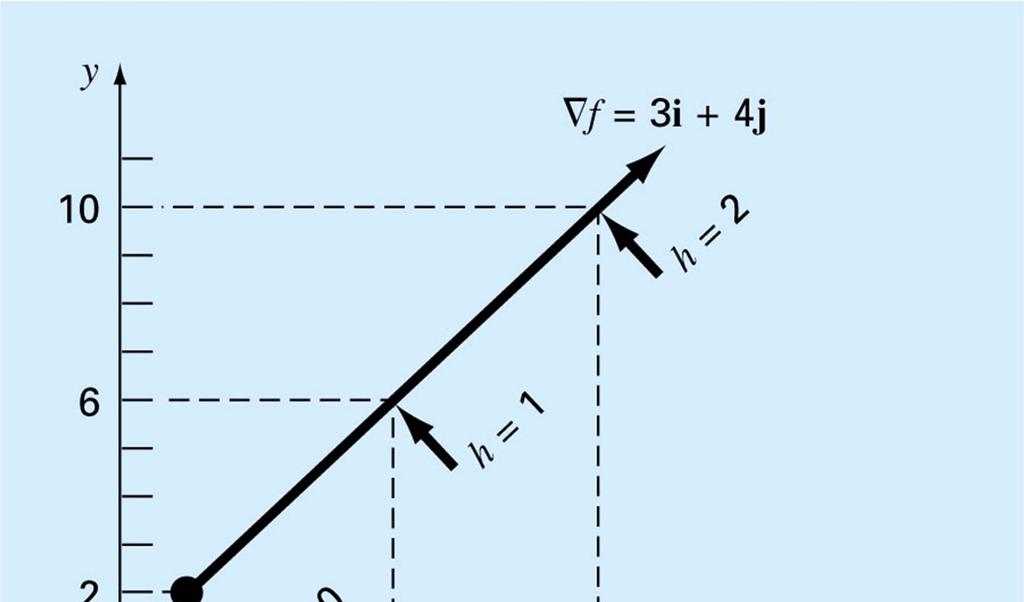
125 Directional Derivatives Given a point x in R n, a unit direction v, and a function f() of n variables, we can define a new function g() of one variable by g(λ)=f(x+λv) The derivative g (λ) is the directional derivative of f() at x in the direction of v This is greatest when v is in the gradient direction
126 x v 1 ( x, x,, x ) 1 2 ( v, v,, v ) T vv 1 2 i 1 2 i f( x) f( x, x,, x ) 1 2 f f f f,,, x x x 1 2 g( λ) f ( x λv) n v n n n T f f f g'(0) ( f) v v, v,, vn x x x n n
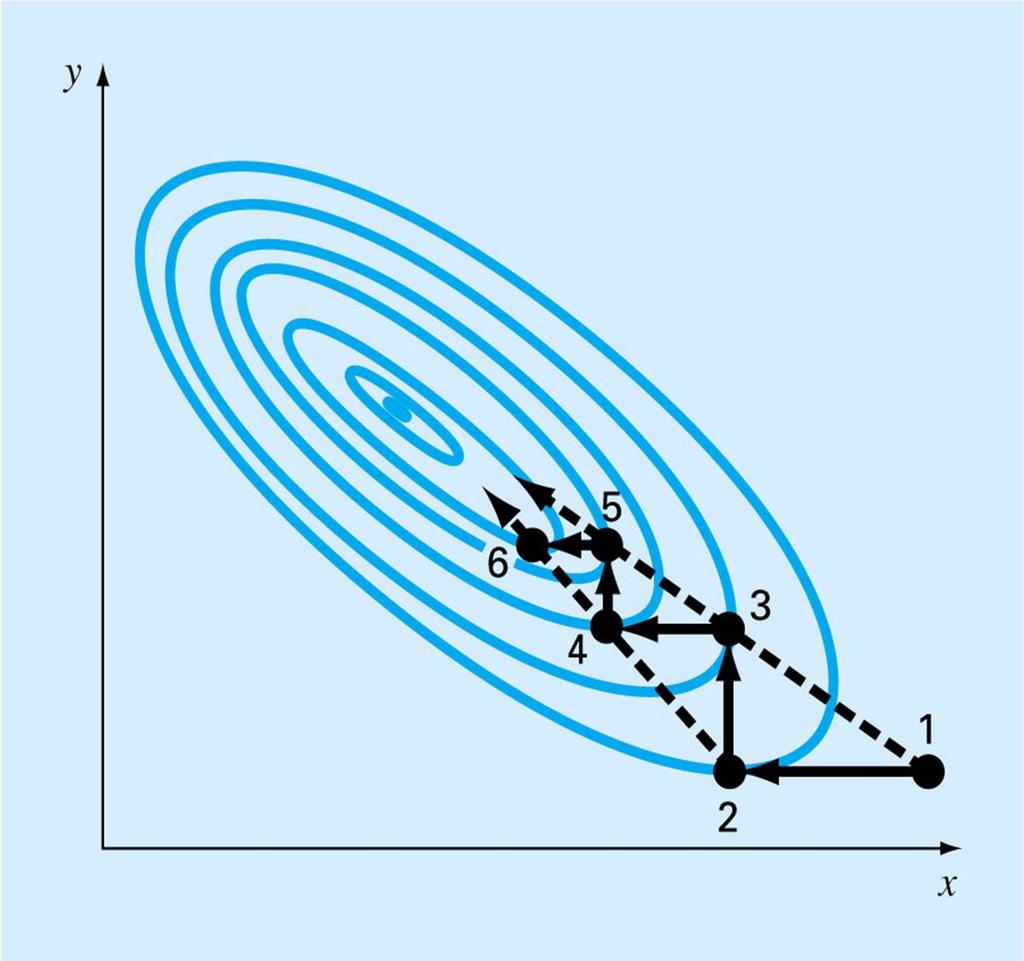
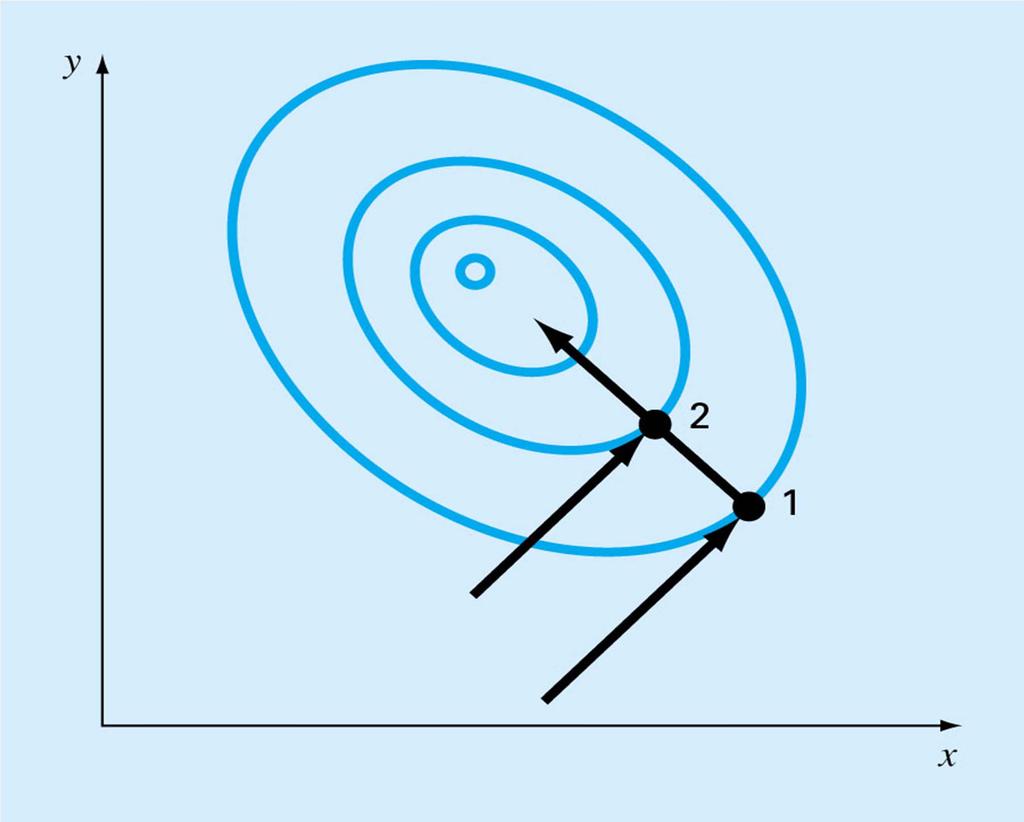
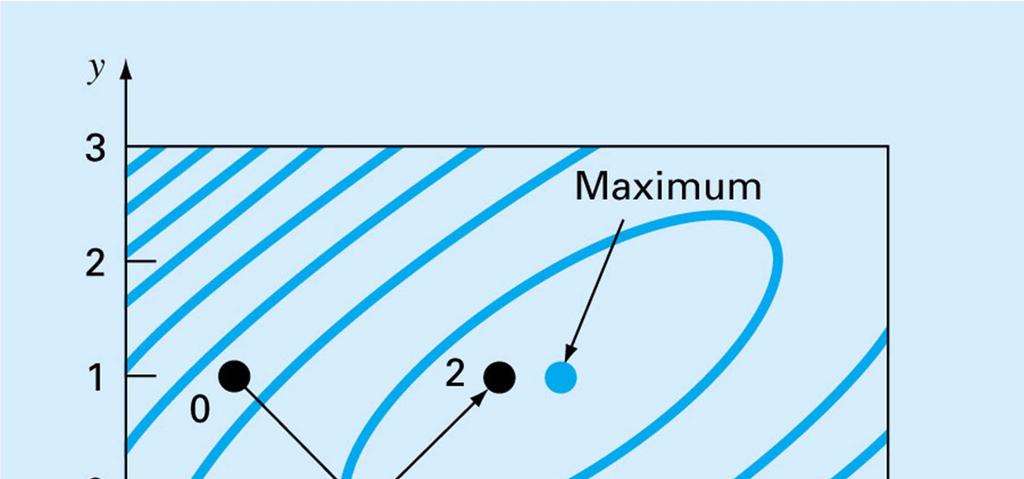
127 Steepest Ascent The gradient direction is the direction of steepest ascent, but not necessarily the direction leading directly to the summit We can search along the direction of steepest ascent until a maximum is reached Then we can search again from a new steepest ascent direction
128 x x f( x, x ) at (2,2) f (2,2) f ( x, x ) x f (2,2) 4 f ( x, x ) 2 x x f (2,2) f (2,2) (4,8) (2 4 λ,2 8 λ) is the gradient line g( λ) f (2 4 λ,2 8 λ) (2 4 λ)(2 8 λ) 2
129

130
131 The Hessian The Hessian of a function f() is the matrix of second partial derivatives The gradient is always 0 at a maximum (for smooth functions) The gradient is also 0 at a minimum The gradient is also 0 at a saddle point, which is neither a maximum nor a minimum A saddle point is a max in at least one direction and a min in at least one direction
132
133 Max, Min, and Saddle Point For one-variable functions, the second derivative is negative at a maximum and positive at a minimum For functions of more than one variable, a zero of the gradient is a max if the second directional derivative is negative for every direction and is a min if the second directional derivative is positive for every direction
134 Positive Definiteness A matrix H is positive definite if x T Hx > 0 for every vector x Equivalently, every eigenvalue of H is positive λ is an eigenvalue of H with eigenvector x if Hx = λx -H is positive definite if every eigenvalue of H is negative
135 Max, Min, and Saddle Point If the gradient f of a function f is zero at a point x and the Hessian H is positive definite at that point, then x is a local min If f is zero at a point x and -H is positive definite at that point, then x is a local max If f is zero at a point x and neither H nor -H is positive definite at that point, then x is a saddle point The determinant H helps only in dimension 1 or 2
136 Finite-Difference Approximations If analytical derivatives cannot be evaluated, one can use finite-difference approximations Centered difference approximations are in general more accurate, though requiring extra function evaluations Increment often macheps 1/2 or 1e-8 for dp This can be problematic for large problems
137 Complexity of Finite-Difference Derivatives In an n-variable problem, the function value is one function evaluation (FE) A finite-difference gradient is n FE s if forward or backward and 2n FE s if centered. A finite difference Hessian is O(n 2 ) FE s With a thousand variable problem, this can be huge
138 Steepest Ascent/Descent This is the simplest of the gradient-based methods From the current guess, compute the gradient Search along the gradient direction until a local max is reached of this onedimensional function Repeat until convergence
139
140 f( x, x ) 2x x 2x x 2x f x f x ( x, x ) f ( x, x ) 2x 2 2x ( x, x ) f ( x, x ) 2x 4x True optimum 0 2x 2 2x x 4x x ( x, x ) (2,1) 2 2 H 2 4 2
141 Eigenvalues If H is a matrix, we can find the eigenvalues in a number of ways We will examine numerical methods for this later, but there is an algebraic method for small matrices We illustrate this for the Hessian in this example
142 H Hx H I x x ( 2)( 4) x 0 2 solution is a maximum
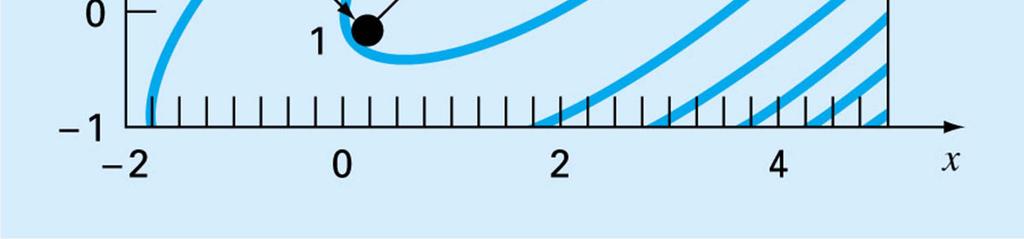
143 f x f x f( x, x ) 2x x 2x x 2x ( x, x ) f ( x, x ) 2x 2 2x ( x, x ) f ( x, x ) 2x 4x f ( 1,1) 7 f ( 1,1) 2x 2 2x f ( 1,1) 2x 4x g( ) f( 1 6,1 6 )
144 g( ) f( 1 6,1 6 ) 2( 1 6 )(1 6 ) 2( 1 6 ) ( 1 6 ) 2(1 6 ) g '( ) x ( 1 6(.2),1 6(.2)) (.2,.2) 2 2
145 f (2,1) 2 f (1, 1) 7 f (0.2, 0.2) 0.2 f f 1 2 (0.2, 0.2) 1.2 (0.2, 0.2) 1.2 g( ) f( , ) g '( ) f (1.4,1) 1.64
146
147 Practical Steepest Ascent In real examples, the maximum in the gradient direction cannot be calculated analytically Problem reduces to one dimensional optimization as a line search One can also use more primitive line searches that are fast but do not try to find the absolute optimum
148 Newton s Method Steepest ascent can be quite slow Newton s method is faster, though it requires evaluation of the Hessian Function is modeled by a quadratic at a point using first and second derivatives The quadratic is solved exactly This is used as the next iterate
149 A second-order multivariate Taylor series expansion at the current iterate is T T f( x) f( x ) f ( x )( x x ) 0.5( x x ) H ( x x ) i i i i i i At the optimum, the gradient is 0, so f( x) f( x ) H ( x x ) 0 i i i If H is invertible,then 1 x i 1 x i H i f( xi) In practice, solve the linear problem, H x H x f( x ) i i i i
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
LECTURE NOTES ELEMENTARY NUMERICAL METHODS. Eusebius Doedel
 LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
Hence a root lies between 1 and 2. Since f a is negative and f(x 0 ) is positive The root lies between a and x 0 i.e. 1 and 1.
 is positive The root lies between a and x 0 i.e. 1 and 1.") The Bisection method or BOLZANO s method or Interval halving method: Find the positive root of x 3 x = 1 correct to four decimal places by bisection method Let f x = x 3 x 1 Here f 0 = 1 = ve, f 1 = ve,
The Bisection method or BOLZANO s method or Interval halving method: Find the positive root of x 3 x = 1 correct to four decimal places by bisection method Let f x = x 3 x 1 Here f 0 = 1 = ve, f 1 = ve,
SOLUTION OF ALGEBRAIC AND TRANSCENDENTAL EQUATIONS BISECTION METHOD
 BISECTION METHOD If a function f(x) is continuous between a and b, and f(a) and f(b) are of opposite signs, then there exists at least one root between a and b. It is shown graphically as, Let f a be negative
BISECTION METHOD If a function f(x) is continuous between a and b, and f(a) and f(b) are of opposite signs, then there exists at least one root between a and b. It is shown graphically as, Let f a be negative
The Solution of Linear Systems AX = B
 Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Numerical Methods - Numerical Linear Algebra
 Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Computational Methods. Systems of Linear Equations
 Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Review. Numerical Methods Lecture 22. Prof. Jinbo Bi CSE, UConn
 Review Taylor Series and Error Analysis Roots of Equations Linear Algebraic Equations Optimization Numerical Differentiation and Integration Ordinary Differential Equations Partial Differential Equations
Review Taylor Series and Error Analysis Roots of Equations Linear Algebraic Equations Optimization Numerical Differentiation and Integration Ordinary Differential Equations Partial Differential Equations
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Computer Representation of Numbers Counting numbers (unsigned integers) are the numbers 0,
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Computer Representation of Numbers Counting numbers (unsigned integers) are the numbers 0,
Review of matrices. Let m, n IN. A rectangle of numbers written like A =
 Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
Extra Problems for Math 2050 Linear Algebra I
 Extra Problems for Math 5 Linear Algebra I Find the vector AB and illustrate with a picture if A = (,) and B = (,4) Find B, given A = (,4) and [ AB = A = (,4) and [ AB = 8 If possible, express x = 7 as
Extra Problems for Math 5 Linear Algebra I Find the vector AB and illustrate with a picture if A = (,) and B = (,4) Find B, given A = (,4) and [ AB = A = (,4) and [ AB = 8 If possible, express x = 7 as
Chapter 2. Solving Systems of Equations. 2.1 Gaussian elimination
 Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
Linear System of Equations
 Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
Today s class. Linear Algebraic Equations LU Decomposition. Numerical Methods, Fall 2011 Lecture 8. Prof. Jinbo Bi CSE, UConn
 Today s class Linear Algebraic Equations LU Decomposition 1 Linear Algebraic Equations Gaussian Elimination works well for solving linear systems of the form: AX = B What if you have to solve the linear
Today s class Linear Algebraic Equations LU Decomposition 1 Linear Algebraic Equations Gaussian Elimination works well for solving linear systems of the form: AX = B What if you have to solve the linear
ECE133A Applied Numerical Computing Additional Lecture Notes
 Winter Quarter 2018 ECE133A Applied Numerical Computing Additional Lecture Notes L. Vandenberghe ii Contents 1 LU factorization 1 1.1 Definition................................. 1 1.2 Nonsingular sets
Winter Quarter 2018 ECE133A Applied Numerical Computing Additional Lecture Notes L. Vandenberghe ii Contents 1 LU factorization 1 1.1 Definition................................. 1 1.2 Nonsingular sets
LU Factorization. Marco Chiarandini. DM559 Linear and Integer Programming. Department of Mathematics & Computer Science University of Southern Denmark
 DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
Optimization. Totally not complete this is...don't use it yet...
 Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
TABLE OF CONTENTS INTRODUCTION, APPROXIMATION & ERRORS 1. Chapter Introduction to numerical methods 1 Multiple-choice test 7 Problem set 9
 TABLE OF CONTENTS INTRODUCTION, APPROXIMATION & ERRORS 1 Chapter 01.01 Introduction to numerical methods 1 Multiple-choice test 7 Problem set 9 Chapter 01.02 Measuring errors 11 True error 11 Relative
TABLE OF CONTENTS INTRODUCTION, APPROXIMATION & ERRORS 1 Chapter 01.01 Introduction to numerical methods 1 Multiple-choice test 7 Problem set 9 Chapter 01.02 Measuring errors 11 True error 11 Relative
NUMERICAL MATHEMATICS AND COMPUTING
 NUMERICAL MATHEMATICS AND COMPUTING Fourth Edition Ward Cheney David Kincaid The University of Texas at Austin 9 Brooks/Cole Publishing Company I(T)P An International Thomson Publishing Company Pacific
NUMERICAL MATHEMATICS AND COMPUTING Fourth Edition Ward Cheney David Kincaid The University of Texas at Austin 9 Brooks/Cole Publishing Company I(T)P An International Thomson Publishing Company Pacific
2.29 Numerical Fluid Mechanics Spring 2015 Lecture 4
 2.29 Spring 2015 Lecture 4 Review Lecture 3 Truncation Errors, Taylor Series and Error Analysis Taylor series: 2 3 n n i1 i i i i i n f( ) f( ) f '( ) f ''( ) f '''( )... f ( ) R 2! 3! n! n1 ( n1) Rn f
2.29 Spring 2015 Lecture 4 Review Lecture 3 Truncation Errors, Taylor Series and Error Analysis Taylor series: 2 3 n n i1 i i i i i n f( ) f( ) f '( ) f ''( ) f '''( )... f ( ) R 2! 3! n! n1 ( n1) Rn f
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Next topics: Solving systems of linear equations
 Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Numerical Optimization
 Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
Numerical Optimization Unit 2: Multivariable optimization problems Che-Rung Lee Scribe: February 28, 2011 (UNIT 2) Numerical Optimization February 28, 2011 1 / 17 Partial derivative of a two variable function
The purpose of computing is insight, not numbers. Richard Wesley Hamming
 Systems of Linear Equations The purpose of computing is insight, not numbers. Richard Wesley Hamming Fall 2010 1 Topics to Be Discussed This is a long unit and will include the following important topics:
Systems of Linear Equations The purpose of computing is insight, not numbers. Richard Wesley Hamming Fall 2010 1 Topics to Be Discussed This is a long unit and will include the following important topics:
Chapter 6. Nonlinear Equations. 6.1 The Problem of Nonlinear Root-finding. 6.2 Rate of Convergence
 Chapter 6 Nonlinear Equations 6. The Problem of Nonlinear Root-finding In this module we consider the problem of using numerical techniques to find the roots of nonlinear equations, f () =. Initially we
Chapter 6 Nonlinear Equations 6. The Problem of Nonlinear Root-finding In this module we consider the problem of using numerical techniques to find the roots of nonlinear equations, f () =. Initially we
Constrained optimization. Unconstrained optimization. One-dimensional. Multi-dimensional. Newton with equality constraints. Active-set method.
 Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
Optimization Unconstrained optimization One-dimensional Multi-dimensional Newton s method Basic Newton Gauss- Newton Quasi- Newton Descent methods Gradient descent Conjugate gradient Constrained optimization
CS 542G: Robustifying Newton, Constraints, Nonlinear Least Squares
 CS 542G: Robustifying Newton, Constraints, Nonlinear Least Squares Robert Bridson October 29, 2008 1 Hessian Problems in Newton Last time we fixed one of plain Newton s problems by introducing line search
CS 542G: Robustifying Newton, Constraints, Nonlinear Least Squares Robert Bridson October 29, 2008 1 Hessian Problems in Newton Last time we fixed one of plain Newton s problems by introducing line search
Motivation: We have already seen an example of a system of nonlinear equations when we studied Gaussian integration (p.8 of integration notes)
") AMSC/CMSC 460 Computational Methods, Fall 2007 UNIT 5: Nonlinear Equations Dianne P. O Leary c 2001, 2002, 2007 Solving Nonlinear Equations and Optimization Problems Read Chapter 8. Skip Section 8.1.1.
AMSC/CMSC 460 Computational Methods, Fall 2007 UNIT 5: Nonlinear Equations Dianne P. O Leary c 2001, 2002, 2007 Solving Nonlinear Equations and Optimization Problems Read Chapter 8. Skip Section 8.1.1.
(One Dimension) Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)
 Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)") Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
1 Number Systems and Errors 1
 Contents 1 Number Systems and Errors 1 1.1 Introduction................................ 1 1.2 Number Representation and Base of Numbers............. 1 1.2.1 Normalized Floating-point Representation...........
Contents 1 Number Systems and Errors 1 1.1 Introduction................................ 1 1.2 Number Representation and Base of Numbers............. 1 1.2.1 Normalized Floating-point Representation...........
Process Model Formulation and Solution, 3E4
 Process Model Formulation and Solution, 3E4 Section B: Linear Algebraic Equations Instructor: Kevin Dunn dunnkg@mcmasterca Department of Chemical Engineering Course notes: Dr Benoît Chachuat 06 October
Process Model Formulation and Solution, 3E4 Section B: Linear Algebraic Equations Instructor: Kevin Dunn dunnkg@mcmasterca Department of Chemical Engineering Course notes: Dr Benoît Chachuat 06 October
2.1 Gaussian Elimination
 2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
Numerical Analysis Fall. Gauss Elimination
 Numerical Analysis 2015 Fall Gauss Elimination Solving systems m g g m m g x x x k k k k k k k k k 3 2 1 3 2 1 3 3 3 2 3 2 2 2 1 0 0 Graphical Method For small sets of simultaneous equations, graphing
Numerical Analysis 2015 Fall Gauss Elimination Solving systems m g g m m g x x x k k k k k k k k k 3 2 1 3 2 1 3 3 3 2 3 2 2 2 1 0 0 Graphical Method For small sets of simultaneous equations, graphing
Exact and Approximate Numbers:
 Eact and Approimate Numbers: The numbers that arise in technical applications are better described as eact numbers because there is not the sort of uncertainty in their values that was described above.
Eact and Approimate Numbers: The numbers that arise in technical applications are better described as eact numbers because there is not the sort of uncertainty in their values that was described above.
8 Numerical methods for unconstrained problems
 8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
Numerical Linear Algebra
 Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Program Lecture 2. Numerical Linear Algebra. Gaussian elimination (2) Gaussian elimination. Decompositions, numerical aspects
 Gaussian elimination. Decompositions, numerical aspects") Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
Practical Linear Algebra: A Geometry Toolbox
 Practical Linear Algebra: A Geometry Toolbox Third edition Chapter 12: Gauss for Linear Systems Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/pla
Practical Linear Algebra: A Geometry Toolbox Third edition Chapter 12: Gauss for Linear Systems Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/pla
ROOT FINDING REVIEW MICHELLE FENG
 ROOT FINDING REVIEW MICHELLE FENG 1.1. Bisection Method. 1. Root Finding Methods (1) Very naive approach based on the Intermediate Value Theorem (2) You need to be looking in an interval with only one
ROOT FINDING REVIEW MICHELLE FENG 1.1. Bisection Method. 1. Root Finding Methods (1) Very naive approach based on the Intermediate Value Theorem (2) You need to be looking in an interval with only one
Scientific Computing
 Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Lecture Notes: Geometric Considerations in Unconstrained Optimization
 Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
Lecture Notes: Geometric Considerations in Unconstrained Optimization James T. Allison February 15, 2006 The primary objectives of this lecture on unconstrained optimization are to: Establish connections
1. Method 1: bisection. The bisection methods starts from two points a 0 and b 0 such that
 Chapter 4 Nonlinear equations 4.1 Root finding Consider the problem of solving any nonlinear relation g(x) = h(x) in the real variable x. We rephrase this problem as one of finding the zero (root) of a
Chapter 4 Nonlinear equations 4.1 Root finding Consider the problem of solving any nonlinear relation g(x) = h(x) in the real variable x. We rephrase this problem as one of finding the zero (root) of a
Linear Algebraic Equations
 Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Lecture 4: Linear Algebra 1
 Lecture 4: Linear Algebra 1 Sourendu Gupta TIFR Graduate School Computational Physics 1 February 12, 2010 c : Sourendu Gupta (TIFR) Lecture 4: Linear Algebra 1 CP 1 1 / 26 Outline 1 Linear problems Motivation
Lecture 4: Linear Algebra 1 Sourendu Gupta TIFR Graduate School Computational Physics 1 February 12, 2010 c : Sourendu Gupta (TIFR) Lecture 4: Linear Algebra 1 CP 1 1 / 26 Outline 1 Linear problems Motivation
Linear Algebraic Equations
 Linear Algebraic Equations Linear Equations: a + a + a + a +... + a = c 11 1 12 2 13 3 14 4 1n n 1 a + a + a + a +... + a = c 21 2 2 23 3 24 4 2n n 2 a + a + a + a +... + a = c 31 1 32 2 33 3 34 4 3n n
Linear Algebraic Equations Linear Equations: a + a + a + a +... + a = c 11 1 12 2 13 3 14 4 1n n 1 a + a + a + a +... + a = c 21 2 2 23 3 24 4 2n n 2 a + a + a + a +... + a = c 31 1 32 2 33 3 34 4 3n n
LINEAR ALGEBRA: NUMERICAL METHODS. Version: August 12,
 LINEAR ALGEBRA: NUMERICAL METHODS. Version: August 12, 2000 74 6 Summary Here we summarize the most important information about theoretical and numerical linear algebra. MORALS OF THE STORY: I. Theoretically
LINEAR ALGEBRA: NUMERICAL METHODS. Version: August 12, 2000 74 6 Summary Here we summarize the most important information about theoretical and numerical linear algebra. MORALS OF THE STORY: I. Theoretically
Math 471 (Numerical methods) Chapter 3 (second half). System of equations
 Chapter 3 (second half). System of equations") Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
Linear Algebra Section 2.6 : LU Decomposition Section 2.7 : Permutations and transposes Wednesday, February 13th Math 301 Week #4
 Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
GENG2140, S2, 2012 Week 7: Curve fitting
 GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
GENG2140, S2, 2012 Week 7: Curve fitting Curve fitting is the process of constructing a curve, or mathematical function, f(x) that has the best fit to a series of data points Involves fitting lines and
Introduction to Applied Linear Algebra with MATLAB
 Sigam Series in Applied Mathematics Volume 7 Rizwan Butt Introduction to Applied Linear Algebra with MATLAB Heldermann Verlag Contents Number Systems and Errors 1 1.1 Introduction 1 1.2 Number Representation
Sigam Series in Applied Mathematics Volume 7 Rizwan Butt Introduction to Applied Linear Algebra with MATLAB Heldermann Verlag Contents Number Systems and Errors 1 1.1 Introduction 1 1.2 Number Representation
Math 411 Preliminaries
 Math 411 Preliminaries Provide a list of preliminary vocabulary and concepts Preliminary Basic Netwon s method, Taylor series expansion (for single and multiple variables), Eigenvalue, Eigenvector, Vector
Math 411 Preliminaries Provide a list of preliminary vocabulary and concepts Preliminary Basic Netwon s method, Taylor series expansion (for single and multiple variables), Eigenvalue, Eigenvector, Vector
CHAPTER 4 ROOTS OF EQUATIONS
 CHAPTER 4 ROOTS OF EQUATIONS Chapter 3 : TOPIC COVERS (ROOTS OF EQUATIONS) Definition of Root of Equations Bracketing Method Graphical Method Bisection Method False Position Method Open Method One-Point
CHAPTER 4 ROOTS OF EQUATIONS Chapter 3 : TOPIC COVERS (ROOTS OF EQUATIONS) Definition of Root of Equations Bracketing Method Graphical Method Bisection Method False Position Method Open Method One-Point
Elementary Linear Algebra
 Matrices J MUSCAT Elementary Linear Algebra Matrices Definition Dr J Muscat 2002 A matrix is a rectangular array of numbers, arranged in rows and columns a a 2 a 3 a n a 2 a 22 a 23 a 2n A = a m a mn We
Matrices J MUSCAT Elementary Linear Algebra Matrices Definition Dr J Muscat 2002 A matrix is a rectangular array of numbers, arranged in rows and columns a a 2 a 3 a n a 2 a 22 a 23 a 2n A = a m a mn We
Matrix decompositions
 Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers
Matrix decompositions How can we solve Ax = b? 1 Linear algebra Typical linear system of equations : x 1 x +x = x 1 +x +9x = 0 x 1 +x x = The variables x 1, x, and x only appear as linear terms (no powers
CS 257: Numerical Methods
 CS 57: Numerical Methods Final Exam Study Guide Version 1.00 Created by Charles Feng http://www.fenguin.net CS 57: Numerical Methods Final Exam Study Guide 1 Contents 1 Introductory Matter 3 1.1 Calculus
CS 57: Numerical Methods Final Exam Study Guide Version 1.00 Created by Charles Feng http://www.fenguin.net CS 57: Numerical Methods Final Exam Study Guide 1 Contents 1 Introductory Matter 3 1.1 Calculus
Line Search Methods for Unconstrained Optimisation
 Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
10.34 Numerical Methods Applied to Chemical Engineering Fall Quiz #1 Review
 10.34 Numerical Methods Applied to Chemical Engineering Fall 2015 Quiz #1 Review Study guide based on notes developed by J.A. Paulson, modified by K. Severson Linear Algebra We ve covered three major topics
10.34 Numerical Methods Applied to Chemical Engineering Fall 2015 Quiz #1 Review Study guide based on notes developed by J.A. Paulson, modified by K. Severson Linear Algebra We ve covered three major topics
Nonlinear Optimization
 Nonlinear Optimization (Com S 477/577 Notes) Yan-Bin Jia Nov 7, 2017 1 Introduction Given a single function f that depends on one or more independent variable, we want to find the values of those variables
Nonlinear Optimization (Com S 477/577 Notes) Yan-Bin Jia Nov 7, 2017 1 Introduction Given a single function f that depends on one or more independent variable, we want to find the values of those variables
5.7 Cramer's Rule 1. Using Determinants to Solve Systems Assumes the system of two equations in two unknowns
 5.7 Cramer's Rule 1. Using Determinants to Solve Systems Assumes the system of two equations in two unknowns (1) possesses the solution and provided that.. The numerators and denominators are recognized
5.7 Cramer's Rule 1. Using Determinants to Solve Systems Assumes the system of two equations in two unknowns (1) possesses the solution and provided that.. The numerators and denominators are recognized
1. Nonlinear Equations. This lecture note excerpted parts from Michael Heath and Max Gunzburger. f(x) = 0
 = 0") Numerical Analysis 1 1. Nonlinear Equations This lecture note excerpted parts from Michael Heath and Max Gunzburger. Given function f, we seek value x for which where f : D R n R n is nonlinear. f(x) =
Numerical Analysis 1 1. Nonlinear Equations This lecture note excerpted parts from Michael Heath and Max Gunzburger. Given function f, we seek value x for which where f : D R n R n is nonlinear. f(x) =
Solving Linear Systems of Equations
 Solving Linear Systems of Equations Gerald Recktenwald Portland State University Mechanical Engineering Department gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Solving Linear Systems of Equations Gerald Recktenwald Portland State University Mechanical Engineering Department gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
LU Factorization. LU factorization is the most common way of solving linear systems! Ax = b LUx = b
 AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
AIMS Exercise Set # 1
 AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
(f(x) P 3 (x)) dx. (a) The Lagrange formula for the error is given by
 P 3 (x)) dx. (a) The Lagrange formula for the error is given by") 1. QUESTION (a) Given a nth degree Taylor polynomial P n (x) of a function f(x), expanded about x = x 0, write down the Lagrange formula for the truncation error, carefully defining all its elements. How
1. QUESTION (a) Given a nth degree Taylor polynomial P n (x) of a function f(x), expanded about x = x 0, write down the Lagrange formula for the truncation error, carefully defining all its elements. How
Mathematical optimization
 Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
Optimization Mathematical optimization Determine the best solutions to certain mathematically defined problems that are under constrained determine optimality criteria determine the convergence of the
Introduction - Motivation. Many phenomena (physical, chemical, biological, etc.) are model by differential equations. f f(x + h) f(x) (x) = lim
 are model by differential equations. f f(x + h) f(x) (x) = lim") Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
LINEAR SYSTEMS (11) Intensive Computation
 Intensive Computation") LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 3 Chapter 10 LU Factorization PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
Part 3 Chapter 10 LU Factorization PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
Math 5630: Iterative Methods for Systems of Equations Hung Phan, UMass Lowell March 22, 2018
 1 Linear Systems Math 5630: Iterative Methods for Systems of Equations Hung Phan, UMass Lowell March, 018 Consider the system 4x y + z = 7 4x 8y + z = 1 x + y + 5z = 15. We then obtain x = 1 4 (7 + y z)
1 Linear Systems Math 5630: Iterative Methods for Systems of Equations Hung Phan, UMass Lowell March, 018 Consider the system 4x y + z = 7 4x 8y + z = 1 x + y + 5z = 15. We then obtain x = 1 4 (7 + y z)
lecture 2 and 3: algorithms for linear algebra
 lecture 2 and 3: algorithms for linear algebra STAT 545: Introduction to computational statistics Vinayak Rao Department of Statistics, Purdue University August 27, 2018 Solving a system of linear equations
lecture 2 and 3: algorithms for linear algebra STAT 545: Introduction to computational statistics Vinayak Rao Department of Statistics, Purdue University August 27, 2018 Solving a system of linear equations
Chapter 9: Gaussian Elimination
 Uchechukwu Ofoegbu Temple University Chapter 9: Gaussian Elimination Graphical Method The solution of a small set of simultaneous equations, can be obtained by graphing them and determining the location
Uchechukwu Ofoegbu Temple University Chapter 9: Gaussian Elimination Graphical Method The solution of a small set of simultaneous equations, can be obtained by graphing them and determining the location
Numerical Methods I Solving Nonlinear Equations
 Numerical Methods I Solving Nonlinear Equations Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 October 16th, 2014 A. Donev (Courant Institute)
Numerical Methods I Solving Nonlinear Equations Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 October 16th, 2014 A. Donev (Courant Institute)
Chapter 2. Solving Systems of Equations. 2.1 Gaussian elimination
 Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
Linear Algebra Massoud Malek
 CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
Notes for CS542G (Iterative Solvers for Linear Systems)
") Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
PART I Lecture Notes on Numerical Solution of Root Finding Problems MATH 435
 PART I Lecture Notes on Numerical Solution of Root Finding Problems MATH 435 Professor Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL. 60115 USA E mail: dattab@math.niu.edu
PART I Lecture Notes on Numerical Solution of Root Finding Problems MATH 435 Professor Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL. 60115 USA E mail: dattab@math.niu.edu
Queens College, CUNY, Department of Computer Science Numerical Methods CSCI 361 / 761 Spring 2018 Instructor: Dr. Sateesh Mane.
 Queens College, CUNY, Department of Computer Science Numerical Methods CSCI 361 / 761 Spring 2018 Instructor: Dr. Sateesh Mane c Sateesh R. Mane 2018 3 Lecture 3 3.1 General remarks March 4, 2018 This
Queens College, CUNY, Department of Computer Science Numerical Methods CSCI 361 / 761 Spring 2018 Instructor: Dr. Sateesh Mane c Sateesh R. Mane 2018 3 Lecture 3 3.1 General remarks March 4, 2018 This
Scientific Computing: Dense Linear Systems
 Scientific Computing: Dense Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 February 9th, 2012 A. Donev (Courant Institute)
Scientific Computing: Dense Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 February 9th, 2012 A. Donev (Courant Institute)
Computational Methods. Least Squares Approximation/Optimization
 Computational Methods Least Squares Approximation/Optimization Manfred Huber 2011 1 Least Squares Least squares methods are aimed at finding approximate solutions when no precise solution exists Find the
Computational Methods Least Squares Approximation/Optimization Manfred Huber 2011 1 Least Squares Least squares methods are aimed at finding approximate solutions when no precise solution exists Find the
Outline. Scientific Computing: An Introductory Survey. Optimization. Optimization Problems. Examples: Optimization Problems
 Outline Scientific Computing: An Introductory Survey Chapter 6 Optimization 1 Prof. Michael. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Outline Scientific Computing: An Introductory Survey Chapter 6 Optimization 1 Prof. Michael. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Numerical Methods I Non-Square and Sparse Linear Systems
 Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
1 Numerical optimization
 Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
x x2 2 + x3 3 x4 3. Use the divided-difference method to find a polynomial of least degree that fits the values shown: (b)
") Numerical Methods - PROBLEMS. The Taylor series, about the origin, for log( + x) is x x2 2 + x3 3 x4 4 + Find an upper bound on the magnitude of the truncation error on the interval x.5 when log( + x)
Numerical Methods - PROBLEMS. The Taylor series, about the origin, for log( + x) is x x2 2 + x3 3 x4 4 + Find an upper bound on the magnitude of the truncation error on the interval x.5 when log( + x)
Conjugate Gradient (CG) Method
 Method") Conjugate Gradient (CG) Method by K. Ozawa 1 Introduction In the series of this lecture, I will introduce the conjugate gradient method, which solves efficiently large scale sparse linear simultaneous
Conjugate Gradient (CG) Method by K. Ozawa 1 Introduction In the series of this lecture, I will introduce the conjugate gradient method, which solves efficiently large scale sparse linear simultaneous
Solving linear equations with Gaussian Elimination (I)
") Term Projects Solving linear equations with Gaussian Elimination The QR Algorithm for Symmetric Eigenvalue Problem The QR Algorithm for The SVD Quasi-Newton Methods Solving linear equations with Gaussian
Term Projects Solving linear equations with Gaussian Elimination The QR Algorithm for Symmetric Eigenvalue Problem The QR Algorithm for The SVD Quasi-Newton Methods Solving linear equations with Gaussian
EIGENVALUE PROBLEMS. EIGENVALUE PROBLEMS p. 1/4
 EIGENVALUE PROBLEMS EIGENVALUE PROBLEMS p. 1/4 EIGENVALUE PROBLEMS p. 2/4 Eigenvalues and eigenvectors Let A C n n. Suppose Ax = λx, x 0, then x is a (right) eigenvector of A, corresponding to the eigenvalue
EIGENVALUE PROBLEMS EIGENVALUE PROBLEMS p. 1/4 EIGENVALUE PROBLEMS p. 2/4 Eigenvalues and eigenvectors Let A C n n. Suppose Ax = λx, x 0, then x is a (right) eigenvector of A, corresponding to the eigenvalue
Numerical optimization
 THE UNIVERSITY OF WESTERN ONTARIO LONDON ONTARIO Paul Klein Office: SSC 408 Phone: 661-111 ext. 857 Email: paul.klein@uwo.ca URL: www.ssc.uwo.ca/economics/faculty/klein/ Numerical optimization In these
THE UNIVERSITY OF WESTERN ONTARIO LONDON ONTARIO Paul Klein Office: SSC 408 Phone: 661-111 ext. 857 Email: paul.klein@uwo.ca URL: www.ssc.uwo.ca/economics/faculty/klein/ Numerical optimization In these
Numerical Analysis Lecture Notes
 Numerical Analysis Lecture Notes Peter J Olver 8 Numerical Computation of Eigenvalues In this part, we discuss some practical methods for computing eigenvalues and eigenvectors of matrices Needless to
Numerical Analysis Lecture Notes Peter J Olver 8 Numerical Computation of Eigenvalues In this part, we discuss some practical methods for computing eigenvalues and eigenvectors of matrices Needless to
AM 205: lecture 6. Last time: finished the data fitting topic Today s lecture: numerical linear algebra, LU factorization
 AM 205: lecture 6 Last time: finished the data fitting topic Today s lecture: numerical linear algebra, LU factorization Unit II: Numerical Linear Algebra Motivation Almost everything in Scientific Computing
AM 205: lecture 6 Last time: finished the data fitting topic Today s lecture: numerical linear algebra, LU factorization Unit II: Numerical Linear Algebra Motivation Almost everything in Scientific Computing
Mathematical Foundations
 Chapter 1 Mathematical Foundations 1.1 Big-O Notations In the description of algorithmic complexity, we often have to use the order notations, often in terms of big O and small o. Loosely speaking, for
Chapter 1 Mathematical Foundations 1.1 Big-O Notations In the description of algorithmic complexity, we often have to use the order notations, often in terms of big O and small o. Loosely speaking, for
Scientific Computing. Roots of Equations
 ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Polynomials Polynomials A polynomial is of the form: ( x) = a 0 + a 1 x + a 2 x 2 +L+ a n x n f
ECE257 Numerical Methods and Scientific Computing Roots of Equations Today s s class: Roots of Equations Polynomials Polynomials A polynomial is of the form: ( x) = a 0 + a 1 x + a 2 x 2 +L+ a n x n f
HOMEWORK PROBLEMS FROM STRANG S LINEAR ALGEBRA AND ITS APPLICATIONS (4TH EDITION)
") HOMEWORK PROBLEMS FROM STRANG S LINEAR ALGEBRA AND ITS APPLICATIONS (4TH EDITION) PROFESSOR STEVEN MILLER: BROWN UNIVERSITY: SPRING 2007 1. CHAPTER 1: MATRICES AND GAUSSIAN ELIMINATION Page 9, # 3: Describe
HOMEWORK PROBLEMS FROM STRANG S LINEAR ALGEBRA AND ITS APPLICATIONS (4TH EDITION) PROFESSOR STEVEN MILLER: BROWN UNIVERSITY: SPRING 2007 1. CHAPTER 1: MATRICES AND GAUSSIAN ELIMINATION Page 9, # 3: Describe
Numerical optimization. Numerical optimization. Longest Shortest where Maximal Minimal. Fastest. Largest. Optimization problems
 1 Numerical optimization Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book Numerical optimization 048921 Advanced topics in vision Processing and Analysis of
1 Numerical optimization Alexander & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book Numerical optimization 048921 Advanced topics in vision Processing and Analysis of
Linear System of Equations
 Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
Linear System of Equations Linear systems are perhaps the most widely applied numerical procedures when real-world situation are to be simulated. Example: computing the forces in a TRUSS. F F 5. 77F F.
Practical Optimization: Basic Multidimensional Gradient Methods
 Practical Optimization: Basic Multidimensional Gradient Methods László Kozma Lkozma@cis.hut.fi Helsinki University of Technology S-88.4221 Postgraduate Seminar on Signal Processing 22. 10. 2008 Contents
Practical Optimization: Basic Multidimensional Gradient Methods László Kozma Lkozma@cis.hut.fi Helsinki University of Technology S-88.4221 Postgraduate Seminar on Signal Processing 22. 10. 2008 Contents
Computational Techniques Prof. Sreenivas Jayanthi. Department of Chemical Engineering Indian institute of Technology, Madras
 Computational Techniques Prof. Sreenivas Jayanthi. Department of Chemical Engineering Indian institute of Technology, Madras Module No. # 05 Lecture No. # 24 Gauss-Jordan method L U decomposition method
Computational Techniques Prof. Sreenivas Jayanthi. Department of Chemical Engineering Indian institute of Technology, Madras Module No. # 05 Lecture No. # 24 Gauss-Jordan method L U decomposition method
Root Finding Methods
 Root Finding Methods Let's take a simple problem ax 2 +bx+c=0 Can calculate roots using the quadratic equation or just by factoring Easy and does not need any numerical methods How about solving for the
Root Finding Methods Let's take a simple problem ax 2 +bx+c=0 Can calculate roots using the quadratic equation or just by factoring Easy and does not need any numerical methods How about solving for the