Sailing Performance and Maneuverability of a Traditional Ryukyuan Tribute Ship
|
|
|
- Ella Joseph
- 5 years ago
- Views:
Transcription
1 sia Navigation Conference 009 ailing Performance and Maneuverability of a Traditional Ryukyuan Tribute hip by Yutaka MUYM (Kanazawa Institute of Technology) Hikaru YGI (Tokai University ) Yutaka TERO (Tokai University )
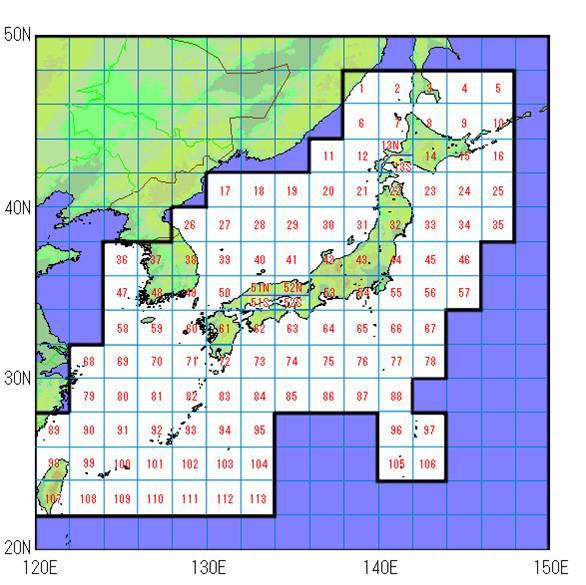
2 INTRODUCTION Ryukyuan tribute ships were used for the trade between China and Ryukyu, south Japan, from 4 th to 9 th century. We revealed the sailing performance and maneuverability of a tribute ship. First, steady sailing performance of the ship was obtained using a velocity prediction program (VPP). Then, maneuverability of the ship was clarified by means of numerical simulation. The simulated results showed ship response to the steered rudder angle and ship trajectory.
3 3
4 Beijing Fujian Naha Taiwan ailing route between China and Ryukyu 4
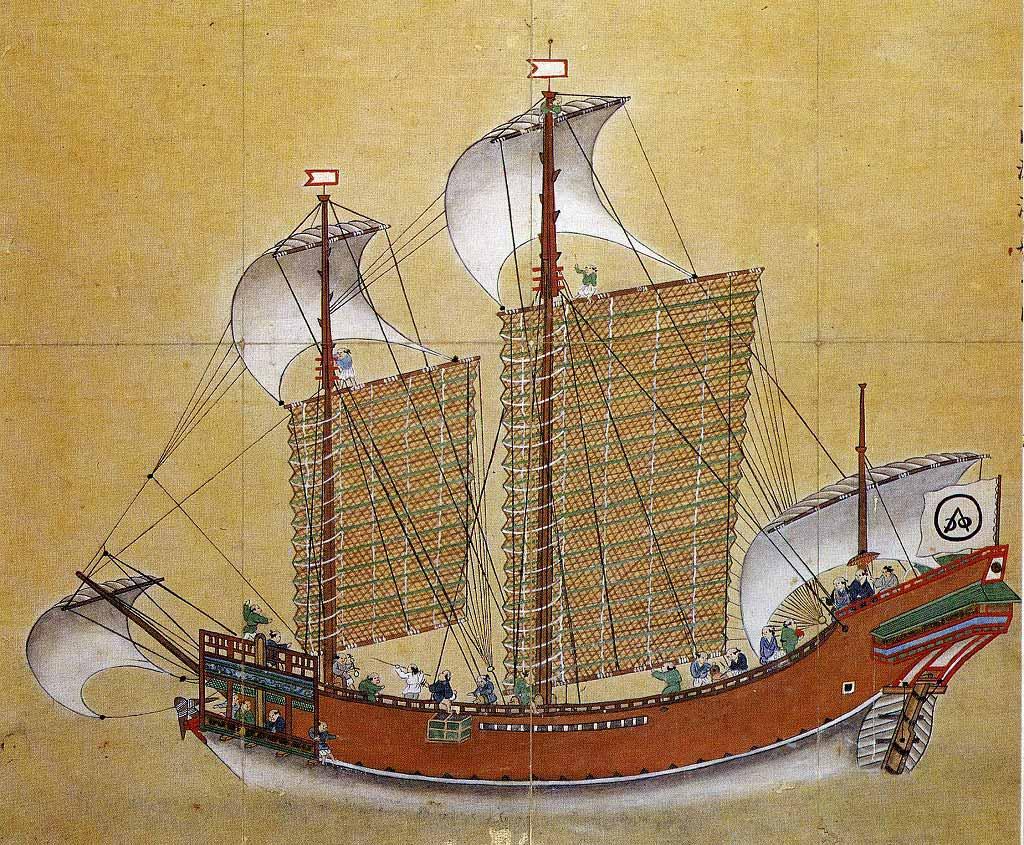
5 What is the Ryukyuan Tribute hip? 5
6 6

7 7




8 8

9 9
10 Deck plan, and bow and stern plans of the model 0
11 Hull lines of the model
12 Principal dimensions of the tribute ship presumed from the model (in full scale size) Length over all: L O (m) 30.7 Length water line: L WL (m) 3. BeamMaximum: Bmax(m) 8.7 Beam water line: B WL (m) 8.5 Depth extreme: Dext (m) 6.8 draft extreme: dext (m) 3. L WL /B WL.74 B WL /dext.7 C B /(LwlBwld 0.4 Displacement: (m 3 ) 65 ail area: (m ) 70

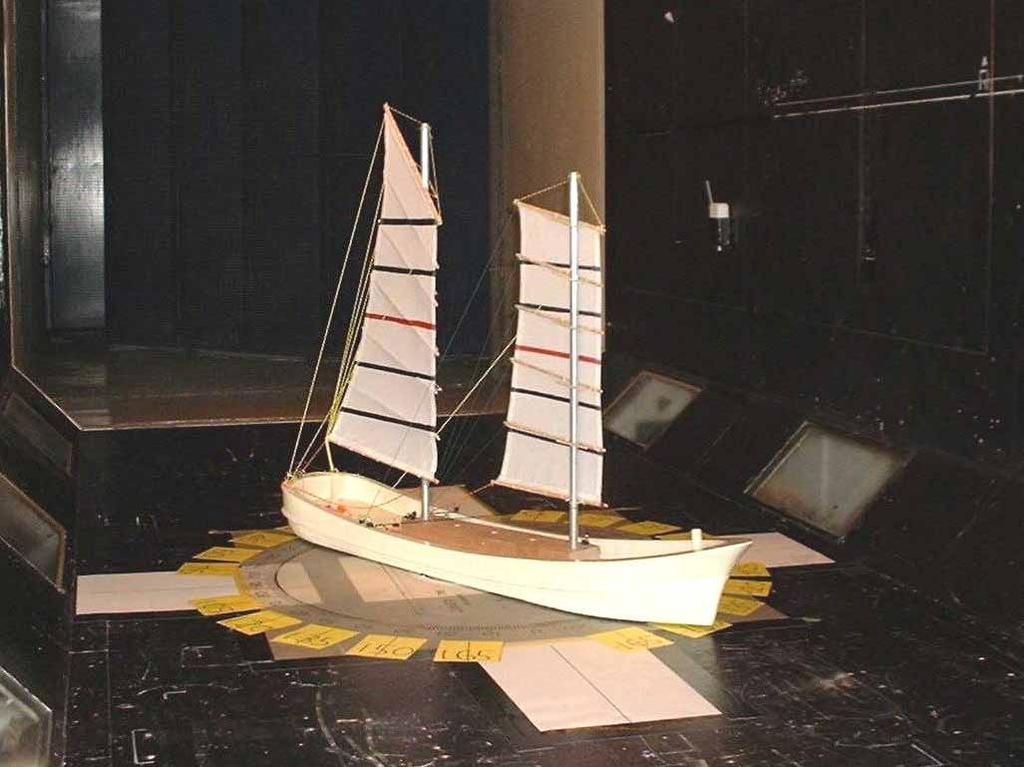
13 Tank test model 3
14 Tank test in the circulating water channel 4
15 30 Resistance [KN] VB[kt] Estimated upright resistance of the tribute ship 5
16 6 Hydrodynamic coefficients of the hull D L V N N L D V K K L D V Y Y L D V X X B H H B H H B H H B H H,,, φ φ φ φ φ φ φ φφ N v N v N N K v K v K K Y v Y v Y Y X v X v X X vvv v H vvv v H vvv v H vvvv vv H ,,,
17 YH' XH',NH' [deg] Variation of hydrodynamic coefficients of hull with leeway angle (without rudder forces) 7
18 Hydrodynamic coefficients of the rudder X R K R C C Xδ Kδ sinα sinα R R sinδ, cosδ, Y R N R C C Yδ Nδ sinα R sinα R cosδ cosφ, cosδ cosφ, where, α R δ γ R tan v l u R ψ& R : Effective attack angle of the rudder R : Decreasing ratio of inflow angle l R : Distance between application point of the rudder force and C.G. of the ship 8





19 Rudder fastening ropes, and variation of rudder plate depth 9

 (.")

20 R0 R R Even with keel depth Lower than keel by 5mm Lower than keel by 50mm (0.65m in full scale) (.30m in full scale) Difference of rudder depth for the oblique angle tests and rudder angle tests 0
21 XR' YR' NR' [deg] [deg] [deg] R0 R R Variation of hydrodynamic coefficients of rudder with rudder angle for the cases of R0, R and R
22 erodynamic coefficients of the sail 3 3,,, a a a a U N N U K K U Y Y U X X
23 3
24 4
25 Performance of dual Chinese lug rig (hinshi-bo in Japanese) by wind tunnel 5test

26 .0 Wing and wing.5.0 Xs' Normal trim Xs', Ys', Ks', Ns' Ns' -.0 Ys', Ks' Wing and wing setting [deg] erodynamic coefficients of the dual lug rig for calculation of the tribute ship (for the case of starboard tack) 6
27 teady ailing Performance by Velocity Prediction Program (VPP) 7
28 8 Coordinate system and definition of forces and moments β β γ γ β γ ) sin( sin ) cos( T T T B T B T U U V U V U U
29 9 Equations for equilibrium sailing state 0, ) ( 0, ) ( 0 a B R H a B R H U Y LD V Y Y X U X LD V X X 0. ) ( 0, sin ) ( 3 3 a B R H a B R H U N D L V N N GM U K LD V K K φ Unknown variables obtained by Newton-Raphson method (Velocity Prediction Program VPP) ship velocity : V B leeway angle : heel angle : rudder angle :
30 True wind speed VB [knot] T 30 [deg] Rudder depth: R [deg] U0[m/s] U 8[m/s] U 6[m/s] VB VB[knot] T [deg] teady sailing performance at the true wind speeds of U T 6, 8 and 0m/s with the rudder depth condition R 30
31 Rudder depth VB [knot] T 30 [deg] [deg] U 8[m/s] R0 R R VB VB[knot] T [deg] ailing performance variation with the rudder depth condition 3 at the true wind speed U T 8m/s
32 Numerical imulation of Wearing Maneuver 3
33 33 Equations of motion for maneuver urge: 0 ) ( ) sin cos ( ) ( X U X D L V X X v X v m m m u m m a B R H v z y x ψ ψ φ φ ψ & & & & m mass m x, m y, m z added mass u, v velocity components along x and y-axis X 0 resistance at upright condition
34 34 Roll: Yaw: way: a B R H y z x z y U Y L D V Y Y Y v m m u m m v m m m ) ( cos )sin ( ) ( ) sin cos ( ψ φ φ φ ψ φ φ ψ & & & & & { } φ ψ φ φ φ sin ) ( cos sin ) ( ) ( ) ( 3 GM U K L D V K K J I J I J I a B R H zz zz yy yy xx xx & && { } { }. ) ( cos sin ) ( ) ( )cos ( )sin ( 3 a B R H zz zz yy yy zz zz yy yy U N D L V N N N J I J I J I J I ψ ψφ φ φ ψ φ φ ψ & & & && &
35 U T 8m/s Port tack tarboard tack (a) R (-60) 40 (-0) (b) R (-60) 40 (-0) imulated time histories of sailing state parameters for the cases of R0 and R rudder depth conditions 35
36 50m Wind UT 8m/s tart of wearing maneuver R0 R R imulated ship trajectories at wearing maneuver for the cases of R0, R and R rudder depth conditions 36
37 Conclusions ailing performance and maneuverability of a tribute ship were studied by means of VPP and numerical simulation. The actual closest sailing angle to the wind of this ship was assumed to be around 70 degrees, and the fastest velocity was almost 30% of the true wind speeds. The turning radius was estimated about 80m, and the adequate rudder depth was suggested. These results will provide useful suggestions for the maneuverability and sailing technique of the tribute ships, which are not mentioned in the old documents or only 37 supposed from the old pictures.
38 Thank you for your kind attention. 38
39 39
40 40
41 4
42 X Y Z Euler-Lamb equations of motion b K M N b b b b b ( m m ) u& x ( m my ) rv ( m mz ) qw ( m m ) v& y ( m mz ) pw ( m mx ) ru ( m m ) w& z ( m mx ) qu ( m my ) pv ( I xx J ) p& xx ( my mz ) wv {( I yy J yy ) ( I zz J zz )} ( I yy J yy ) q& ( mz mx ) uw {( I zz J zz ) ( I xx J xx )} ( I J ) r& ( m m ) uv ( I J ) ( I J ) zz zz x y qr rp { }pq xx xx yy yy x y z b b b cosφ sinφ 0 x sinφ y cosφ z Equations of motion expressed in the horizontal body axes system 4
43 ngular velocity terms X dded masses and added moments of inertia π m D C ( x) dx where, J m J vr y zz z yy m ( C ) m π Y r k 4 N r k 0. 54k y L π x D C y L π B Cz 8 L π x B C 8 L y ( x) ( x) z dx ( x) dx dx where, k: spect ratio of projected area of under water part of the hull ( C ) 3C C y ( C C ) 3 ( x) where, ( C ) 3C C z ( C C ) 3 ( x)

44 44

45 45
Dynamics and Control of Rotorcraft
 Dynamics and Control of Rotorcraft Helicopter Aerodynamics and Dynamics Abhishek Department of Aerospace Engineering Indian Institute of Technology, Kanpur February 3, 2018 Overview Flight Dynamics Model
Dynamics and Control of Rotorcraft Helicopter Aerodynamics and Dynamics Abhishek Department of Aerospace Engineering Indian Institute of Technology, Kanpur February 3, 2018 Overview Flight Dynamics Model
Lecture AC-1. Aircraft Dynamics. Copy right 2003 by Jon at h an H ow
 Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
CFD Based Hull Hydrodynamic Forces for Simulation of Ship Manoeuvres
 International Journal on Marine avigation and Safety of Sea Transportation Volume 3 umber 1 March 9 Based Hull Hydrodynamic Forces for Simulation of Ship Manoeuvres T. Tabaczek, T. Gornicz & J. Kulczyk
International Journal on Marine avigation and Safety of Sea Transportation Volume 3 umber 1 March 9 Based Hull Hydrodynamic Forces for Simulation of Ship Manoeuvres T. Tabaczek, T. Gornicz & J. Kulczyk
Equations of Motion for Micro Air Vehicles
 Equations of Motion for Micro Air Vehicles September, 005 Randal W. Beard, Associate Professor Department of Electrical and Computer Engineering Brigham Young University Provo, Utah 84604 USA voice: (80
Equations of Motion for Micro Air Vehicles September, 005 Randal W. Beard, Associate Professor Department of Electrical and Computer Engineering Brigham Young University Provo, Utah 84604 USA voice: (80
Final Exam TTK4190 Guidance and Control
 Trondheim Department of engineering Cybernetics Contact person: Professor Thor I. Fossen Phone: 73 59 43 61 Cell: 91 89 73 61 Email: tif@itk.ntnu.no Final Exam TTK4190 Guidance and Control Friday May 15,
Trondheim Department of engineering Cybernetics Contact person: Professor Thor I. Fossen Phone: 73 59 43 61 Cell: 91 89 73 61 Email: tif@itk.ntnu.no Final Exam TTK4190 Guidance and Control Friday May 15,
developed at "Dunarea de Jos" University of Galati Presented by: BENZOHRA Abdelmalek
 Master Thesis presented in partial fulfillment of the requirements for the double degree: Advanced Master in Naval Architecture conferred by University of Liege "Master of Sciences in Applied Mechanics,
Master Thesis presented in partial fulfillment of the requirements for the double degree: Advanced Master in Naval Architecture conferred by University of Liege "Master of Sciences in Applied Mechanics,
SHIP BUOYANCY AND STABILITY
 SHIP BUOYANCY AND STABILITY Lecture 04 Ship stability-z curve 09/11/2017 Ship Buoyancy and Stability 1 Literature J. Matusiak: Laivan kelluvuus ja vakavuus Biran A. B., Ship Hydrostatics and Stability,
SHIP BUOYANCY AND STABILITY Lecture 04 Ship stability-z curve 09/11/2017 Ship Buoyancy and Stability 1 Literature J. Matusiak: Laivan kelluvuus ja vakavuus Biran A. B., Ship Hydrostatics and Stability,
Research on Prediction of Ship Manoeuvrability
 Journal of Shipping and Ocean Engineering 8 (08 30-35 doi 0.765/59-5879/08.0.004 D DAVID PUBLISHING Research on Prediction of Ship Manoeuvrability CUI Jian, WU Zixin and CHEN Weimin Shanghai Ship and Shipping
Journal of Shipping and Ocean Engineering 8 (08 30-35 doi 0.765/59-5879/08.0.004 D DAVID PUBLISHING Research on Prediction of Ship Manoeuvrability CUI Jian, WU Zixin and CHEN Weimin Shanghai Ship and Shipping
Linearized Equations of Motion!
 Linearized Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 216 Learning Objectives Develop linear equations to describe small perturbational motions Apply to aircraft dynamic equations
Linearized Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 216 Learning Objectives Develop linear equations to describe small perturbational motions Apply to aircraft dynamic equations
Research on Ship Navigation in Numerical Simulation of Weather and Ocean in a Bay
 International Journal on Marine Navigation and Safety of Sea Transportation Volume 6 Number 1 March 1 Research on Ship Navigation in Numerical Simulation of eather and Ocean in a Bay T. Soda Kobe University,
International Journal on Marine Navigation and Safety of Sea Transportation Volume 6 Number 1 March 1 Research on Ship Navigation in Numerical Simulation of eather and Ocean in a Bay T. Soda Kobe University,
Chapter IV. (Ship Hydro-Statics & Dynamics) Floatation & Stability
 Floatation & Stability") Chapter V (Ship Hydro-Statics & Dynamics) Floatation & Stability 4.1 mportant Hydro-Static Curves or Relations (see Fig. 4.11 at p44 & handout) Displacement Curves (displacement [molded, total] vs. draft,
Chapter V (Ship Hydro-Statics & Dynamics) Floatation & Stability 4.1 mportant Hydro-Static Curves or Relations (see Fig. 4.11 at p44 & handout) Displacement Curves (displacement [molded, total] vs. draft,
Ship Control in Manoeuvring Situations with Fuzzy Logic Controllers
 International Journal on Marine Navigation and Safety of Sea Transportation Volume 2 Number March 28 Ship Control in Manoeuvring Situations with Fuzzy Logic Controllers L. Morawski Gnia Maritime University,
International Journal on Marine Navigation and Safety of Sea Transportation Volume 2 Number March 28 Ship Control in Manoeuvring Situations with Fuzzy Logic Controllers L. Morawski Gnia Maritime University,
SHIP BUOYANCY AND STABILITY. Lecture 02 Ship equilibrium and introduction to ship hydrostatics
 SHIP BUOYANCY AND STABILITY Lecture 02 Ship equilibrium and introduction to ship hydrostatics 1 Literature J. Matusiak: Laivan kelluvuus ja vakavuus Biran A. B., Ship Hydrostatics and Stability, 2003 J.
SHIP BUOYANCY AND STABILITY Lecture 02 Ship equilibrium and introduction to ship hydrostatics 1 Literature J. Matusiak: Laivan kelluvuus ja vakavuus Biran A. B., Ship Hydrostatics and Stability, 2003 J.
Wuchang Shipbuilding Industry Co., Ltd. China Shipbuilding Industry Corporation
 Safety Assessments for Anchor Handling Conditions of Multi-purpose Platform Work Vessels Reporter:Yu Wang Wuchang Shipbuilding Industry Co., Ltd. China Shipbuilding Industry Corporation 2009.12.04 0 Outline
Safety Assessments for Anchor Handling Conditions of Multi-purpose Platform Work Vessels Reporter:Yu Wang Wuchang Shipbuilding Industry Co., Ltd. China Shipbuilding Industry Corporation 2009.12.04 0 Outline
Robot Dynamics - Rotary Wing UAS: Control of a Quadrotor
 Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
/ m U) β - r dr/dt=(n β / C) β+ (N r /C) r [8+8] (c) Effective angle of attack. [4+6+6]
![/ m U) β - r dr/dt=(n β / C) β+ (N r /C) r [8+8] (c) Effective angle of attack. [4+6+6]](/thumbs/91/105418625.jpg "/ m U) β - r dr/dt=(n β / C) β+ (N r /C) r [8+8] (c) Effective angle of attack. [4+6+6]") Code No: R05322101 Set No. 1 1. (a) Explain the following terms with examples i. Stability ii. Equilibrium. (b) Comment upon the requirements of stability of a i. Military fighter aircraft ii. Commercial
Code No: R05322101 Set No. 1 1. (a) Explain the following terms with examples i. Stability ii. Equilibrium. (b) Comment upon the requirements of stability of a i. Military fighter aircraft ii. Commercial
GUST RESPONSE ANALYSIS IN THE FLIGHT FORMATION OF UNMANNED AIR VEHICLES
 28 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES GUST RESPONSE ANALYSIS IN THE FLIGHT FORMATION OF UNMANNED AIR VEHICLES Yoshinobu Inada*, Kyohei Ohta*, and Hideaki Takanobu** *Tokai University,
28 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES GUST RESPONSE ANALYSIS IN THE FLIGHT FORMATION OF UNMANNED AIR VEHICLES Yoshinobu Inada*, Kyohei Ohta*, and Hideaki Takanobu** *Tokai University,
MODELLING THE DYNAMICS OF SHIPS WITH DIFFERENT PROPULSION SYSTEMS FOR CONTROL PURPOSE
 POLISH MARITIME RESEARCH 1(89) 2016 Vol. 23; pp. 31-36 10.1515/pomr-2016-0005 MODELLING THE DYNAMICS OF SHIPS WITH DIFFERENT PROPULSION SYSTEMS FOR CONTROL PURPOSE Witold Gierusz, Assoc. Prof. Gdynia Maritime
POLISH MARITIME RESEARCH 1(89) 2016 Vol. 23; pp. 31-36 10.1515/pomr-2016-0005 MODELLING THE DYNAMICS OF SHIPS WITH DIFFERENT PROPULSION SYSTEMS FOR CONTROL PURPOSE Witold Gierusz, Assoc. Prof. Gdynia Maritime
Transport Analysis Report Full Stability Analysis. Project EXAMPLE PROJECT DEMO RUN FOR REVIEW. Client ORCA OFFSHORE
 ONLINE MARINE ENGINEERING Transport Analysis Report Full Stability Analysis Project EXAMPLE PROJECT DEMO RUN FOR REVIEW Client ORCA OFFSHORE Issue Date 18/11/2010 Report reference number: Herm-18-Nov-10-47718
ONLINE MARINE ENGINEERING Transport Analysis Report Full Stability Analysis Project EXAMPLE PROJECT DEMO RUN FOR REVIEW Client ORCA OFFSHORE Issue Date 18/11/2010 Report reference number: Herm-18-Nov-10-47718
Optimal Control, Guidance and Estimation. Lecture 16. Overview of Flight Dynamics II. Prof. Radhakant Padhi. Prof. Radhakant Padhi
 Optimal Control, Guidance and Estimation Lecture 16 Overview of Flight Dynamics II Prof. Radhakant Padhi Dept. of erospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Prof.
Optimal Control, Guidance and Estimation Lecture 16 Overview of Flight Dynamics II Prof. Radhakant Padhi Dept. of erospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Prof.
Direct spatial motion simulation of aircraft subjected to engine failure
 Direct spatial motion simulation of aircraft subjected to engine failure Yassir ABBAS*,1, Mohammed MADBOULI 2, Gamal EL-BAYOUMI 2 *Corresponding author *,1 Aeronautical Engineering Department, Engineering
Direct spatial motion simulation of aircraft subjected to engine failure Yassir ABBAS*,1, Mohammed MADBOULI 2, Gamal EL-BAYOUMI 2 *Corresponding author *,1 Aeronautical Engineering Department, Engineering
OTC Copyright 2012, Offshore Technology Conference
 OT 3166 Wind Effect Estimation and Navigational Effect in Side by Side Offloading Operation for FNG and NG arrier Ships Toshifumi Fujiwara, Kazuhiro ukawa, Hiroshi Sato, Shunji Kato, National Maritime
OT 3166 Wind Effect Estimation and Navigational Effect in Side by Side Offloading Operation for FNG and NG arrier Ships Toshifumi Fujiwara, Kazuhiro ukawa, Hiroshi Sato, Shunji Kato, National Maritime
Flight Dynamics and Control
 Flight Dynamics and Control Lecture 1: Introduction G. Dimitriadis University of Liege Reference material Lecture Notes Flight Dynamics Principles, M.V. Cook, Arnold, 1997 Fundamentals of Airplane Flight
Flight Dynamics and Control Lecture 1: Introduction G. Dimitriadis University of Liege Reference material Lecture Notes Flight Dynamics Principles, M.V. Cook, Arnold, 1997 Fundamentals of Airplane Flight
Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein
 7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
RULES FOR CLASSIFICATION. Ships. Part 3 Hull Chapter 4 Loads. Edition January 2017 DNV GL AS
 RULES FOR CLASSIFICATION Ships Edition January 2017 Part 3 Hull Chapter 4 The content of this service document is the subject of intellectual property rights reserved by ("DNV GL"). The user accepts that
RULES FOR CLASSIFICATION Ships Edition January 2017 Part 3 Hull Chapter 4 The content of this service document is the subject of intellectual property rights reserved by ("DNV GL"). The user accepts that
STABILITY AND TRIM OF MARINE VESSELS. Massachusetts Institute of Technology, Subject 2.017
 STABILITY AND TRIM OF MARINE VESSELS Concept of Mass Center for a Rigid Body Centroid the point about which moments due to gravity are zero: 6 g m i (x g x i )= 0 Æ x = 6m i x i / 6m i = 6m i x i / M g
STABILITY AND TRIM OF MARINE VESSELS Concept of Mass Center for a Rigid Body Centroid the point about which moments due to gravity are zero: 6 g m i (x g x i )= 0 Æ x = 6m i x i / 6m i = 6m i x i / M g
SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2
 SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2 Ship Motions Ship motions in a seaway are very complicated but can be broken down into 6-degrees of freedom motions relative to 3 mutually perpendicular axes
SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2 Ship Motions Ship motions in a seaway are very complicated but can be broken down into 6-degrees of freedom motions relative to 3 mutually perpendicular axes
Study of the hydrodynamic flow around a 70m sailing boat for powering, wave pattern and propeller efficiency prediction
 Study of the hydrodynamic flow around a 70m sailing boat for powering, wave pattern and propeller efficiency prediction Romain Baudson Supervisor: Prof. Dario Boote (UNIGE) External Reviewer: Prof. Pierre
Study of the hydrodynamic flow around a 70m sailing boat for powering, wave pattern and propeller efficiency prediction Romain Baudson Supervisor: Prof. Dario Boote (UNIGE) External Reviewer: Prof. Pierre
Hydrodynamic Modeling of Planing Boats with Asymmetry and Steady Condition.
 Hydrodynamic Modeling of Planing Boats with Asymmetry and Steady ondition. R. Algarín. & O. Tascón otecmar, artagena, olombia ABSTRAT: This paper shows a hydrodynamic study of planing crafts, monohull
Hydrodynamic Modeling of Planing Boats with Asymmetry and Steady ondition. R. Algarín. & O. Tascón otecmar, artagena, olombia ABSTRAT: This paper shows a hydrodynamic study of planing crafts, monohull
Dynamics of a Rigid Ship
 Aalto University publication series SCIENCE + TECHNOLOGY 11/2013 Dynamics of a Rigid Ship Jerzy Matusiak Aalto University School of Engineering Department of Applied Mechanics Marine Technology Aalto University
Aalto University publication series SCIENCE + TECHNOLOGY 11/2013 Dynamics of a Rigid Ship Jerzy Matusiak Aalto University School of Engineering Department of Applied Mechanics Marine Technology Aalto University
Time Response of Dynamic Systems! Multi-Dimensional Trajectories Position, velocity, and acceleration are vectors
 Time Response of Dynamic Systems Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Multi-dimensional trajectories Numerical integration Linear and nonlinear systems Linearization
Time Response of Dynamic Systems Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Multi-dimensional trajectories Numerical integration Linear and nonlinear systems Linearization
Trajectory Tracking of a Near-Surface Torpedo using Numerical Methods
 ISSN (Print) : 2347-671 An ISO 3297: 27 Certified Organization Vol.4, Special Issue 12, September 215 Trajectory Tracking of a Near-Surface Torpedo using Numerical Methods Anties K. Martin, Anubhav C.A.,
ISSN (Print) : 2347-671 An ISO 3297: 27 Certified Organization Vol.4, Special Issue 12, September 215 Trajectory Tracking of a Near-Surface Torpedo using Numerical Methods Anties K. Martin, Anubhav C.A.,
Investigation of ship maneuvering with hydrodynamic effects between ship and bank
 Journal of Mechanical Science and Technology Journal of Mechanical Science and Technology (8) 3~36 www.springerlink.com/content/738-494 Investigation of ship maneuvering with hydrodynamic effects between
Journal of Mechanical Science and Technology Journal of Mechanical Science and Technology (8) 3~36 www.springerlink.com/content/738-494 Investigation of ship maneuvering with hydrodynamic effects between
Introduction to Flight Dynamics
 Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
Chapter 2 Hydrostatics Buoyancy, Floatation and Stability
 Chapter 2 Hydrostatics uoyancy, Floatation and Stability Zerihun Alemayehu Rm. E119 AAiT Force of buoyancy an upward force exerted by a fluid pressure on fully or partially floating body Gravity Archimedes
Chapter 2 Hydrostatics uoyancy, Floatation and Stability Zerihun Alemayehu Rm. E119 AAiT Force of buoyancy an upward force exerted by a fluid pressure on fully or partially floating body Gravity Archimedes
Chapter 4 The Equations of Motion
 Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Offshore Hydromechanics Module 1
 Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 6. Real Flows part 2 Introduction Topics of Module 1 Problems of interest Chapter 1 Hydrostatics Chapter 2 Floating stability Chapter 2 Constant
Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 6. Real Flows part 2 Introduction Topics of Module 1 Problems of interest Chapter 1 Hydrostatics Chapter 2 Floating stability Chapter 2 Constant
SHIP BUOYANCY AND STABILITY. Lecture 03 Ship initial stability
 SHIP BUOYANCY AND STABILITY Lecture 3 Ship initial stability 1 Literature J. Matusiak: Laivan kelluvuus ja vakavuus Biran A. B., Ship Hydrostatics and Stability, 23 J. Matusiak: Short Introduction to Ship
SHIP BUOYANCY AND STABILITY Lecture 3 Ship initial stability 1 Literature J. Matusiak: Laivan kelluvuus ja vakavuus Biran A. B., Ship Hydrostatics and Stability, 23 J. Matusiak: Short Introduction to Ship
Probability of Ship on Collision Courses Based on the New PAW Using MMG Model and AIS Data
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 9 Number 1 March 215 DOI: 1.12716/11.9.1.5 robability of Ship on Collision Courses Based on
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 9 Number 1 March 215 DOI: 1.12716/11.9.1.5 robability of Ship on Collision Courses Based on
Hydrostatic and Stability IN A NUTSHELL. of Floating Structures. Compendium. Relevant to Questions in Exam. Robert Bronsart
 Hydrostatic and Stability of Floating Structures IN A NUTSHELL Compendium Relevant to Questions in Exam Robert Bronsart Version Date Comment 2.21 September 2015 minor corrections Author: Robert Bronsart
Hydrostatic and Stability of Floating Structures IN A NUTSHELL Compendium Relevant to Questions in Exam Robert Bronsart Version Date Comment 2.21 September 2015 minor corrections Author: Robert Bronsart
Dynamic Modeling of Fixed-Wing UAVs
 Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
Lecture 11 Overview of Flight Dynamics I. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 11 Overview of Flight Dynamics I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Dr. Radhakant Padhi Asst. Professor
Lecture 11 Overview of Flight Dynamics I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Dr. Radhakant Padhi Asst. Professor
Robot Dynamics Fixed-wing UAVs: Dynamic Modeling and Control
 Robot Dynamics Fixed-wing UAVs: Dynamic Modeling and Control 151-0851-00 V Marco Hutter, Roland Siegwart, and Thomas Stastny 05.12.2017 1 Contents Fixed-wing UAVs 1. ntroduction 2. Aerodynamic Basics 3.
Robot Dynamics Fixed-wing UAVs: Dynamic Modeling and Control 151-0851-00 V Marco Hutter, Roland Siegwart, and Thomas Stastny 05.12.2017 1 Contents Fixed-wing UAVs 1. ntroduction 2. Aerodynamic Basics 3.
DYNAMIC MODELING AND STABILITY ANALYSIS OF A HIGH ALTITUDE AIRSHIP
 DYNAMIC MODELING AND STABILITY ANALYSIS OF A HIGH ALTITUDE AIRSHIP Ramesh Hun 1, Nandan K Sinha 2, Debasish Chakraborti 3 and P.Balasubramanian 4 1 Research Scholar and Corresponding author, 2 Professor,
DYNAMIC MODELING AND STABILITY ANALYSIS OF A HIGH ALTITUDE AIRSHIP Ramesh Hun 1, Nandan K Sinha 2, Debasish Chakraborti 3 and P.Balasubramanian 4 1 Research Scholar and Corresponding author, 2 Professor,
Offshore Hydromechanics Module 1
 Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 1. Intro, Hydrostatics and Stability Introduction OE4630d1 Offshore Hydromechanics Module 1 dr.ir. Pepijn de Jong Assistant Prof. at Ship Hydromechanics
Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 1. Intro, Hydrostatics and Stability Introduction OE4630d1 Offshore Hydromechanics Module 1 dr.ir. Pepijn de Jong Assistant Prof. at Ship Hydromechanics
Simultaneous-Perturbation-Stochastic-Approximation Algorithm for Parachute Parameter Estimation
 JOURNAL OF AIRCRAFT Vol. 4, No. 5, September October 005 Simultaneous-Perturbation-Stochastic-Approximation Algorithm for Parachute Parameter Estimation Govindarajan Kothandaraman and Mario A. Rotea Purdue
JOURNAL OF AIRCRAFT Vol. 4, No. 5, September October 005 Simultaneous-Perturbation-Stochastic-Approximation Algorithm for Parachute Parameter Estimation Govindarajan Kothandaraman and Mario A. Rotea Purdue
Aircraft Flight Dynamics & Vortex Lattice Codes
 Aircraft Flight Dynamics Vortex Lattice Codes AA241X April 14 2014 Stanford University Overview 1. Equations of motion 2. Non-dimensional EOM Aerodynamics 3. Trim Analysis Longitudinal Lateral 4. Linearized
Aircraft Flight Dynamics Vortex Lattice Codes AA241X April 14 2014 Stanford University Overview 1. Equations of motion 2. Non-dimensional EOM Aerodynamics 3. Trim Analysis Longitudinal Lateral 4. Linearized
WIND EFFECT ESTIMATION IN SIDE BY SIDE OFFLOADING OPERATION FOR FLNG AND LNG CARRIER SHIPS
 Proceedings of the SME 0 3st International Conference on Ocean, Offshore and rctic Engineering OME0 July -6, 0, Rio de Janeiro, Brazil OME0-8 WID EFFECT ESTIMTIO I SIDE B SIDE OFFODIG OPERTIO FOR FG D
Proceedings of the SME 0 3st International Conference on Ocean, Offshore and rctic Engineering OME0 July -6, 0, Rio de Janeiro, Brazil OME0-8 WID EFFECT ESTIMTIO I SIDE B SIDE OFFODIG OPERTIO FOR FG D
Stability and Control
 Stability and Control Introduction An important concept that must be considered when designing an aircraft, missile, or other type of vehicle, is that of stability and control. The study of stability is
Stability and Control Introduction An important concept that must be considered when designing an aircraft, missile, or other type of vehicle, is that of stability and control. The study of stability is
Anna University May/June 2013 Exams ME2151 Engineering Mechanics Important Questions.
 Anna University May/June 2013 Exams ME2151 Engineering Mechanics Important Questions 1. Find the resultant force and its direction for the given figure 2. Two forces are acting at a point O as shown in
Anna University May/June 2013 Exams ME2151 Engineering Mechanics Important Questions 1. Find the resultant force and its direction for the given figure 2. Two forces are acting at a point O as shown in
Estimating Maneuvering and Seakeeping Characteristics with Neural Networks
 070131-071 1 Estimating Maneuvering and Seakeeping Characteristics with Neural Networks Paulo Triunfante Martins 1, Victor Lobo 2, Member, IEEE Maneuvering and seakeeping are two very important naval architecture
070131-071 1 Estimating Maneuvering and Seakeeping Characteristics with Neural Networks Paulo Triunfante Martins 1, Victor Lobo 2, Member, IEEE Maneuvering and seakeeping are two very important naval architecture
Interaction of Ships while Opposing Navigation among Small Ice Floes
 ARCTIC OI RECOVERY EXERCISE 05 KEMI ARCTIC 05 Conference Interaction of Ships while Opposing Navigation among Small Ice Floes Vadim K. Goncharov Professor Department of Oceantechnics and Marine Technology
ARCTIC OI RECOVERY EXERCISE 05 KEMI ARCTIC 05 Conference Interaction of Ships while Opposing Navigation among Small Ice Floes Vadim K. Goncharov Professor Department of Oceantechnics and Marine Technology
Circular motion tests and uncertainty analysis for ship maneuverability
 DOI 1.17/s773-9-65-2 ORIGINAL ARTICLE Circular motion tests and uncertainty analysis for ship maneuverability Michio Ueno Æ Yasuo Yoshimura Æ Yoshiaki Tsukada Æ Hideki Miyazaki Received: 13 October 2 /
DOI 1.17/s773-9-65-2 ORIGINAL ARTICLE Circular motion tests and uncertainty analysis for ship maneuverability Michio Ueno Æ Yasuo Yoshimura Æ Yoshiaki Tsukada Æ Hideki Miyazaki Received: 13 October 2 /
Maneuvering predictions in the early design phase using CFD generated PMM data
 9th Symposium on Naval Hydrodynamics othenburg, Sweden, 6-31 August 01 Maneuvering predictions in the early design phase using CFD generated PMM data Claus D. Simonsen, Janne F. Otzen, Christian Klimt,
9th Symposium on Naval Hydrodynamics othenburg, Sweden, 6-31 August 01 Maneuvering predictions in the early design phase using CFD generated PMM data Claus D. Simonsen, Janne F. Otzen, Christian Klimt,
Fundamentals of Airplane Flight Mechanics
 David G. Hull Fundamentals of Airplane Flight Mechanics With 125 Figures and 25 Tables y Springer Introduction to Airplane Flight Mechanics 1 1.1 Airframe Anatomy 2 1.2 Engine Anatomy 5 1.3 Equations of
David G. Hull Fundamentals of Airplane Flight Mechanics With 125 Figures and 25 Tables y Springer Introduction to Airplane Flight Mechanics 1 1.1 Airframe Anatomy 2 1.2 Engine Anatomy 5 1.3 Equations of
A NOVEL MANOEUVERING MODEL BASED ON LOW-ASPECT-RATIO LIFT THEORY AND LAGRANGIAN MECHANICS
 A NOVEL MANOEUVERING MODEL BASED ON LOW-ASPECT-RATIO LIFT THEORY AND LAGRANGIAN MECHANICS Andrew Ross, Tristan Perez Thor I. Fossen, Dept. of Engineering Cybernetics, Norwegian University of Science and
A NOVEL MANOEUVERING MODEL BASED ON LOW-ASPECT-RATIO LIFT THEORY AND LAGRANGIAN MECHANICS Andrew Ross, Tristan Perez Thor I. Fossen, Dept. of Engineering Cybernetics, Norwegian University of Science and
Flight and Orbital Mechanics
 Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
Robot Control Basics CS 685
 Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Design of an adaptive backstepping controller for auto-berthing a cruise ship under wind loads
 csnak, 014 Int. J. Nav. Archit. Ocean Eng. (014) 6:347~360 http://dx.doi.org/10.478/ijnaoe-013-0184 pissn: 09-678, eissn: 09-6790 Design of an adaptive backstepping controller for auto-berthing a cruise
csnak, 014 Int. J. Nav. Archit. Ocean Eng. (014) 6:347~360 http://dx.doi.org/10.478/ijnaoe-013-0184 pissn: 09-678, eissn: 09-6790 Design of an adaptive backstepping controller for auto-berthing a cruise
Aircraft Equations of Motion: Translation and Rotation Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018
 Aircraft Equations of Motion: Translation and Rotation Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018 Learning Objectives What use are the equations of motion? How is the angular orientation of
Aircraft Equations of Motion: Translation and Rotation Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018 Learning Objectives What use are the equations of motion? How is the angular orientation of
AUTOMATIC AIRSPACE AVOIDANCE USING ADVANCED FLIGHT CONTROL SYSTEM
 AUTOMATIC AIRSPACE AVOIDANCE USING ADVANCED FLIGHT CONTROL SYSTEM A Thesis by Yakup Gunbatar Bachelor of Sciences in Aerospace Engineering, Middle East Technical University, 23 Submitted to the Department
AUTOMATIC AIRSPACE AVOIDANCE USING ADVANCED FLIGHT CONTROL SYSTEM A Thesis by Yakup Gunbatar Bachelor of Sciences in Aerospace Engineering, Middle East Technical University, 23 Submitted to the Department
Phys 7221 Homework # 8
 Phys 71 Homework # 8 Gabriela González November 15, 6 Derivation 5-6: Torque free symmetric top In a torque free, symmetric top, with I x = I y = I, the angular velocity vector ω in body coordinates with
Phys 71 Homework # 8 Gabriela González November 15, 6 Derivation 5-6: Torque free symmetric top In a torque free, symmetric top, with I x = I y = I, the angular velocity vector ω in body coordinates with
Interaction of Ships within Navigable Ice Channel
 RescOp - Development of rescue operations in the Gulf of Finland International Seminar: MARITIME SAFETY IN THE GULF OF FINLAND Interaction of Ships within Navigable Ice Channel Vadim K. Goncharov Department
RescOp - Development of rescue operations in the Gulf of Finland International Seminar: MARITIME SAFETY IN THE GULF OF FINLAND Interaction of Ships within Navigable Ice Channel Vadim K. Goncharov Department
Hydrostatics and Stability Dr. Hari V Warrior Department of Ocean Engineering and Naval Architecture Indian Institute of Technology, Kharagpur
 Hydrostatics and Stability Dr. Hari V Warrior Department of Ocean Engineering and Naval Architecture Indian Institute of Technology, Kharagpur Module No. # 01 Lecture No. # 09 Free Surface Effect In the
Hydrostatics and Stability Dr. Hari V Warrior Department of Ocean Engineering and Naval Architecture Indian Institute of Technology, Kharagpur Module No. # 01 Lecture No. # 09 Free Surface Effect In the
Chapter 1 Lecture 2. Introduction 2. Topics. Chapter-1
 Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
SPECIAL CONDITION. Water Load Conditions. SPECIAL CONDITION Water Load Conditions
 Doc. No. : SC-CVLA.051-01 Issue : 1d Date : 04-Aug-009 Page : 1 of 13 SUBJECT : CERTIFICATION SPECIFICATION : VLA.51 PRIMARY GROUP / PANEL : 03 (Structure) SECONDARY GROUPE / PANEL : -- NATURE : SCN VLA.51
Doc. No. : SC-CVLA.051-01 Issue : 1d Date : 04-Aug-009 Page : 1 of 13 SUBJECT : CERTIFICATION SPECIFICATION : VLA.51 PRIMARY GROUP / PANEL : 03 (Structure) SECONDARY GROUPE / PANEL : -- NATURE : SCN VLA.51
The Simulation for Autonomous Navigation of water-jet-propelled Unmanned Surface Vehicle
 The Simulation for Autonomous Navigation of water-jet-propelled Unmanned Surface Vehicle Qi Xiaowei, Renguang,Yuejin Dalian Maritime University of Marine Engineering, Dalian, LiaoNing, 110, China xiaowei0735@13.com
The Simulation for Autonomous Navigation of water-jet-propelled Unmanned Surface Vehicle Qi Xiaowei, Renguang,Yuejin Dalian Maritime University of Marine Engineering, Dalian, LiaoNing, 110, China xiaowei0735@13.com
BIFILAR SUSPENSION MEASUREMENT OF BOAT INERTIA PARAMETERS
 2014, The Society of Naval Architects and Marine Engineers. BIFILAR SUSPENSION MEASUREMENT OF BOAT INERTIA PARAMETERS Peter F. Hinrichsen Manuscript received September 12, 2013; revision received November
2014, The Society of Naval Architects and Marine Engineers. BIFILAR SUSPENSION MEASUREMENT OF BOAT INERTIA PARAMETERS Peter F. Hinrichsen Manuscript received September 12, 2013; revision received November
RULES PUBLICATION NO. 17/P ZONE STRENGTH ANALYSIS OF HULL STRUCTURE OF ROLL ON/ROLL OFF SHIP
 RULES PUBLICATION NO. 17/P ZONE STRENGTH ANALYSIS OF HULL STRUCTURE OF ROLL ON/ROLL OFF SHIP 1995 Publications P (Additional Rule Requirements), issued by Polski Rejestr Statków, complete or extend the
RULES PUBLICATION NO. 17/P ZONE STRENGTH ANALYSIS OF HULL STRUCTURE OF ROLL ON/ROLL OFF SHIP 1995 Publications P (Additional Rule Requirements), issued by Polski Rejestr Statków, complete or extend the
Linear Flight Control Techniques for Unmanned Aerial Vehicles
 Chapter 1 Linear Flight Control Techniques for Unmanned Aerial Vehicles Jonathan P. How, Emilio Frazzoli, and Girish Chowdhary August 2, 2012 1 Abstract This chapter presents an overview of linear flight
Chapter 1 Linear Flight Control Techniques for Unmanned Aerial Vehicles Jonathan P. How, Emilio Frazzoli, and Girish Chowdhary August 2, 2012 1 Abstract This chapter presents an overview of linear flight
Formation Design Systems' Maxsurf Stability Tank Table Generator: Verification and Validation Study
 Formation Design Systems' Maxsurf Stability Tank Table Generator: Verification and Validation Study Edward Dawson Maritime Division Defence Science and Technology Organisation DSTO-TR-2968 ABSTRACT A verification
Formation Design Systems' Maxsurf Stability Tank Table Generator: Verification and Validation Study Edward Dawson Maritime Division Defence Science and Technology Organisation DSTO-TR-2968 ABSTRACT A verification
Spacecraft and Aircraft Dynamics
 Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 4: Contributions to Longitudinal Stability Aircraft Dynamics Lecture 4 In this lecture, we will discuss Airfoils:
Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 4: Contributions to Longitudinal Stability Aircraft Dynamics Lecture 4 In this lecture, we will discuss Airfoils:
Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft
 Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft Naoharu Yoshitani 1, Shin-ichi Hashimoto 2, Takehiro Kimura 3, Kazuki Motohashi 2 and Shoh Ueno 4 1 Dept. of Aerospace Engineering, Teikyo
Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft Naoharu Yoshitani 1, Shin-ichi Hashimoto 2, Takehiro Kimura 3, Kazuki Motohashi 2 and Shoh Ueno 4 1 Dept. of Aerospace Engineering, Teikyo
00_006_7 FHR reports. Ship model calibration. Determination of a Ship Model s Moment of Inertia.
 00_006_7 FHR reports Ship model calibration Determination of a Ship Model s Moment of Inertia www.flandershydraulicsresearch.be Ship model calibration Determination of a Ship Model s Moment of Inertia
00_006_7 FHR reports Ship model calibration Determination of a Ship Model s Moment of Inertia www.flandershydraulicsresearch.be Ship model calibration Determination of a Ship Model s Moment of Inertia
Problem 1: Ship Path-Following Control System (35%)
") Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.
Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.
E & P SERV/US-SUB/ISBM INSTALLATION OF SUBSEA FACILITIES AREA: INDEX OF REVISIONS
 E&P-SERV US-SUB/ISBM TECHNICAL SPECIFICATION Nº: I-ET-3000.00-6600-941-PMU-002 1 de 48 PROJECT: INSTALLATION OF SUBSEA FACILITIES AREA: SUBSEA FACILITIES INDEX OF REVISIONS REV DESCRIPTION AND/OR AFFECTED
E&P-SERV US-SUB/ISBM TECHNICAL SPECIFICATION Nº: I-ET-3000.00-6600-941-PMU-002 1 de 48 PROJECT: INSTALLATION OF SUBSEA FACILITIES AREA: SUBSEA FACILITIES INDEX OF REVISIONS REV DESCRIPTION AND/OR AFFECTED
UNCLASSIFIED. Control of Spinning Symmetric Airframes. Curtis P. Mracek Max Stafford and Mike Unger Raytheon Systems Company Tucson, AZ 85734
 Control of Spinning Symmetric Airframes Curtis P. Mracek Max Stafford and Mike Unger Raytheon Systems Company Tucson, AZ 85734 Several missiles and projectiles have periods during their flight where the
Control of Spinning Symmetric Airframes Curtis P. Mracek Max Stafford and Mike Unger Raytheon Systems Company Tucson, AZ 85734 Several missiles and projectiles have periods during their flight where the
DESIGN OPTIMIZATION STUDY ON A CONTAINERSHIP PROPULSION SYSTEM
 DESIGN OPTIMIZATION STUDY ON A CONTAINERSHIP PROPULSION SYSTEM Brian Cuneo Thomas McKenney Morgan Parker ME 555 Final Report April 19, 2010 ABSTRACT This study develops an optimization algorithm to explore
DESIGN OPTIMIZATION STUDY ON A CONTAINERSHIP PROPULSION SYSTEM Brian Cuneo Thomas McKenney Morgan Parker ME 555 Final Report April 19, 2010 ABSTRACT This study develops an optimization algorithm to explore
Aerodynamics SYST 460/560. George Mason University Fall 2008 CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH. Copyright Lance Sherry (2008)
") Aerodynamics SYST 460/560 George Mason University Fall 2008 1 CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH Copyright Lance Sherry (2008) Ambient & Static Pressure Ambient Pressure Static Pressure 2 Ambient
Aerodynamics SYST 460/560 George Mason University Fall 2008 1 CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH Copyright Lance Sherry (2008) Ambient & Static Pressure Ambient Pressure Static Pressure 2 Ambient
Parachute Dynamic Stability and the Effects of Apparent Inertia
 Parachute Dynamic Stability and the Effects of Apparent Inertia Jason M. Ginn Georgia Institute of Technology, Atlanta, GA, 333 Ian G. Clark Jet Propulsion Laboratory, California Institute of Technology,
Parachute Dynamic Stability and the Effects of Apparent Inertia Jason M. Ginn Georgia Institute of Technology, Atlanta, GA, 333 Ian G. Clark Jet Propulsion Laboratory, California Institute of Technology,
MODELING OF SPIN MODES OF SUPERSONIC AIRCRAFT IN HORIZONTAL WIND TUNNEL
 24 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES MODELING OF SPIN MODES OF SUPERSONIC AIRCRAFT IN HORIZONTAL WIND TUNNEL Federal State Unitary Enterprise «Siberian Aeronautical Research Institute»
24 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES MODELING OF SPIN MODES OF SUPERSONIC AIRCRAFT IN HORIZONTAL WIND TUNNEL Federal State Unitary Enterprise «Siberian Aeronautical Research Institute»
Experiment Design to Obtain Unsteady Force and Moment Data on a Yawing Submarine Model - Sept. 2011
 Experiment Design to Obtain Unsteady Force and Moment Data on a Yawing Submarine Model - Sept. 2011 Problem: This problem is to determine (1) the desired values of fixed parameters and (2) the required
Experiment Design to Obtain Unsteady Force and Moment Data on a Yawing Submarine Model - Sept. 2011 Problem: This problem is to determine (1) the desired values of fixed parameters and (2) the required
Modelling of Opposed Lateral and Longitudinal Tilting Dual-Fan Unmanned Aerial Vehicle
 Modelling of Opposed Lateral and Longitudinal Tilting Dual-Fan Unmanned Aerial Vehicle N. Amiri A. Ramirez-Serrano R. Davies Electrical Engineering Department, University of Calgary, Canada (e-mail: namiri@ucalgary.ca).
Modelling of Opposed Lateral and Longitudinal Tilting Dual-Fan Unmanned Aerial Vehicle N. Amiri A. Ramirez-Serrano R. Davies Electrical Engineering Department, University of Calgary, Canada (e-mail: namiri@ucalgary.ca).
Journal of Fluid Science and Technology
 Science and Technology An Experimental Study on the Darrieus-Savonius Turbine for the Tidal Current Power Generation * Yusaku KYOZUKA ** **Faculty of Engineering Sciences, Kyushu University 6-1 Kasuga
Science and Technology An Experimental Study on the Darrieus-Savonius Turbine for the Tidal Current Power Generation * Yusaku KYOZUKA ** **Faculty of Engineering Sciences, Kyushu University 6-1 Kasuga
Stress Analysis Lecture 4 ME 276 Spring Dr./ Ahmed Mohamed Nagib Elmekawy
 Stress Analysis Lecture 4 ME 76 Spring 017-018 Dr./ Ahmed Mohamed Nagib Elmekawy Shear and Moment Diagrams Beam Sign Convention The positive directions are as follows: The internal shear force causes a
Stress Analysis Lecture 4 ME 76 Spring 017-018 Dr./ Ahmed Mohamed Nagib Elmekawy Shear and Moment Diagrams Beam Sign Convention The positive directions are as follows: The internal shear force causes a
Aerodynamics and Flight Mechanics
 Aerodynamics and Flight Mechanics Principal Investigators: Mike Bragg Eric Loth Graduate Students: Holly Gurbacki (CRI support) Tim Hutchison Devesh Pokhariyal (CRI support) Ryan Oltman 3-1 SMART ICING
Aerodynamics and Flight Mechanics Principal Investigators: Mike Bragg Eric Loth Graduate Students: Holly Gurbacki (CRI support) Tim Hutchison Devesh Pokhariyal (CRI support) Ryan Oltman 3-1 SMART ICING
Manoeuvring Committee Report & Recommendations
 Manoeuvring Committee Report & Recommendations Andrés Cura Hochbaum 26 th International Towing Tank Conference, 28 th August 4 th September 2011, Rio de Janeiro Members & Meetings Tasks Report 1. Introduction
Manoeuvring Committee Report & Recommendations Andrés Cura Hochbaum 26 th International Towing Tank Conference, 28 th August 4 th September 2011, Rio de Janeiro Members & Meetings Tasks Report 1. Introduction
Thin airfoil theory. Chapter Compressible potential flow The full potential equation
 hapter 4 Thin airfoil theory 4. ompressible potential flow 4.. The full potential equation In compressible flow, both the lift and drag of a thin airfoil can be determined to a reasonable level of accuracy
hapter 4 Thin airfoil theory 4. ompressible potential flow 4.. The full potential equation In compressible flow, both the lift and drag of a thin airfoil can be determined to a reasonable level of accuracy
Applications Linear Control Design Techniques in Aircraft Control I
 Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
Gyroscopic Couple and Precessional Motion
 480 l Theory of Machines 14 Fea eatur tures es 1. Introduction.. Precessional Angular Motion. 3. Gyroscopic Couple. 4. Effect of Gyroscopic Couple on an Aeroplane. 5. Terms Used in a Naval Ship. 6. Effect
480 l Theory of Machines 14 Fea eatur tures es 1. Introduction.. Precessional Angular Motion. 3. Gyroscopic Couple. 4. Effect of Gyroscopic Couple on an Aeroplane. 5. Terms Used in a Naval Ship. 6. Effect
A Basic Study on Wheel Flange Climbing using Model Wheelset
 IJR International Journal of Railway Vol. 3, No. 2 / June 2010, pp. 60-67 The Korean Society for Railway A Basic Study on Wheel Flange Climbing using Model Wheelset Yosuke Nagumo*, Katsuya Tanifuji and
IJR International Journal of Railway Vol. 3, No. 2 / June 2010, pp. 60-67 The Korean Society for Railway A Basic Study on Wheel Flange Climbing using Model Wheelset Yosuke Nagumo*, Katsuya Tanifuji and
TECHNICAL REPORT/THESIS
 TECHNICAL REPORT/THESIS A PRESCRIBED FLIGHT PERFORMANCE ASSESSMENT FOR UNDERSEA VEHICLE AUTOPILOT ROBUSTNESS By Daniel J. Bowman Dr. A. Scott Lewis Approved for public release; distribution unlimited The
TECHNICAL REPORT/THESIS A PRESCRIBED FLIGHT PERFORMANCE ASSESSMENT FOR UNDERSEA VEHICLE AUTOPILOT ROBUSTNESS By Daniel J. Bowman Dr. A. Scott Lewis Approved for public release; distribution unlimited The
where G is called the universal gravitational constant.
 UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
Simulation of UAV Systems P. Kaňovský, L. Smrcek, C. Goodchild
 Czech echnical University in Prague Acta Polytechnica Vol. 45 No. 4/005 Simulation of UAV Systems P. Kaňovský, L. Smrcek, C. Goodchild he study described in this paper deals with the issue of a design
Czech echnical University in Prague Acta Polytechnica Vol. 45 No. 4/005 Simulation of UAV Systems P. Kaňovský, L. Smrcek, C. Goodchild he study described in this paper deals with the issue of a design
Development of formulas allowing to predict hydrodynamic responses of inland vessels operated within the range of navigation 0.6 Hs 2.
 Gian Carlo Matheus Torres 6 th EMship cycle: October 2015 February 2017 Master Thesis Development of formulas allowing to predict hydrodynamic responses of inland vessels operated within the range of navigation
Gian Carlo Matheus Torres 6 th EMship cycle: October 2015 February 2017 Master Thesis Development of formulas allowing to predict hydrodynamic responses of inland vessels operated within the range of navigation
Dynamics and Control Preliminary Examination Topics
 Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Robust Nonlinear Design of Three Axes Missile Autopilot via Feedback Linearization
 Robust Nonlinear Design of Three Axes Missile Autopilot via Feedback Linearization Abhijit Das, Ranajit Das and Siddhartha Mukhopadhyay, Amit Patra 1 1 Abstract The nonlinearity and coupling of the missile
Robust Nonlinear Design of Three Axes Missile Autopilot via Feedback Linearization Abhijit Das, Ranajit Das and Siddhartha Mukhopadhyay, Amit Patra 1 1 Abstract The nonlinearity and coupling of the missile
Dynamic Modeling and Motion Simulation for A Winged Hybrid-Driven Underwater Glider *
 China Ocean Eng., Vol. 25, No. 1, pp. 97 112 2011 Chinese Ocean Engineering Society and Springer-Verlag Berlin Heidelberg DOI 10.1007/s13344-011-0008-7 Dynamic Modeling and Motion Simulation for A Winged
China Ocean Eng., Vol. 25, No. 1, pp. 97 112 2011 Chinese Ocean Engineering Society and Springer-Verlag Berlin Heidelberg DOI 10.1007/s13344-011-0008-7 Dynamic Modeling and Motion Simulation for A Winged
Confined water effects on the viscous flow around a tanker with propeller and rudder
 International Shipbuilding Progress 60 (2013) 309 343 309 DOI 10.3233/ISP-130101 IOS Press Confined water effects on the viscous flow around a tanker with propeller and rudder L. Zou and L. Larsson Chalmers
International Shipbuilding Progress 60 (2013) 309 343 309 DOI 10.3233/ISP-130101 IOS Press Confined water effects on the viscous flow around a tanker with propeller and rudder L. Zou and L. Larsson Chalmers
Speed Control of Autonomous Underwater Vehicle with Constraints Using Model Predictive Control
 INTERNATIONAL JOURNAL OF COASTAL & OFFSHORE ENGINEERING IJCOE No. 2/Summer 2016 (27-33) Speed Control of Autonomous Underwater Vehicle with Constraints Using Model Predictive Control Seyyed Hossein Ghenaati
INTERNATIONAL JOURNAL OF COASTAL & OFFSHORE ENGINEERING IJCOE No. 2/Summer 2016 (27-33) Speed Control of Autonomous Underwater Vehicle with Constraints Using Model Predictive Control Seyyed Hossein Ghenaati