Applications Linear Control Design Techniques in Aircraft Control I
|
|
|
- Avice Mason
- 5 years ago
- Views:
Transcription


1 Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
2 Topics Brief Review of Aircraft Flight Dynamics An Overview of Automatic Flight Control Systems Automatic Flight Control Systems: Classical (Frequency Domain) Designs 2
3 Brief Review of Aircraft Flight Dynamics Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore

4 Geometry of Conventional Aircrafts 4

5 Basic Force Balance Weight Lift Drag Thrust 5

6 Basic Moment Balance Rolling Y Pitching Yawing X Z 6

7 Aileron Roll 7
8 Elevator Pitch 8
9 Rudder Yaw 9
10 Airplane Dynamics: Six Degree-of-Freedom Model Ref: Roskam J., Airplane Flight Dynamics and Automatic Controls, U = VR WQ gsin Θ+ ( X + XT ) m 1 V = WP UR+ gsin Φcos Θ+ Y + YT m 1 W = UQ VP+ g cos Φcos Θ+ Z + Z m ( ) ( ) ( ) ( ) P = c1qr+ c2pq+c3 L + LT +c4 N + NT 2 2 Q = c5pr c6( P R ) + c7( M + MT ) R = c PQ c QR + c L + L + c N + N ( ) ( ) T 9 Φ = P+ Qsin Φtan Θ+ Rcos Φtan Θ Θ = Qcos Φ Rsin Φ x I y I Ψ = sin Φ+ cos Φ sec Θ ( Q R ) T T cos ψ sinψ 0 cosθ 0 sinθ U sinψ cosψ cosφ sin φ V = z I sinθ 0 cosθ 0 sinφ cos φ W h = z = UsinΘ V cosθsinφ W cosθcosφ I 10
11 Representation of Longitudinal Dynamics in Small Perturbation State space form: X = AX + BU c A B XU XW 0 g Z Z U 0 U W 0 = MU + M ZU MW M ZW MQ M U0 0 W + W + W Xδ X E δt Zδ Zδ M + M Z M + M Z 0 0 E T = δ W δ δt W δ E E T ΔU ΔW X = Δ Q Δθ U Δδ E c = Δδ T 1 X 1 X XU =, XW = etc. m U m W 11
12 Short Period Mode Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Heavily damped Short time period Constant velocity 12
13 Short Period Dynamics State Space Equation: Δ α a 1 Δα b Δq 11 1 = a21 a + Δ 22 q b Δ 2 δ E Transfer Function Equations: Δα() s As+ B = Δ δ () + + E α α 2 s As Bs C Δqs () q q = 2 s As Bs C Δ δ () + + E As + B 13
14 Long Period (Phugoid) Dynamics Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Lightly damped Changes in pitch attitude, altitude, velocity Constant angle of attack 14
15 Long Period (Phugoid) Dynamics State Space Equation: Δu a g Δu b b Δδ = + Δ θ Transfer Function Equations: Assumption: Δ δ T = E a21 0 θ b21 b 22 δ Δ Δ T Δus () As u + Bu = 2 Δ δ () s As + Bs+ C E Δθ () s As+ B = Δ δ () + + E θ θ 2 s As Bs C 15
16 Representation of Lateral Dynamics in Small Perturbation State space form: X = AX + BU c YV YP ( U0 YR) gcosθ0 * IXZ IXZ I XZ LV + NV LP + NP LR + NR 0 IX IX IX A = IXZ IXZ IXZ NV + LV NP + LP NR + LR 0 IZ IZ IZ Yδ R * IXZ IXZ Lδ + N A δ L A δ + N R δr IX I X B = IXZ IXZ Nδ + L N L A δa δ + R δ R IZ I Z 0 0 X U ΔV ΔP = Δ R Δφ Δδ A c = Δδ R 16
17 Lateral Dynamic Instabilities Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Directional divergence Do not possess directional stability Tend towards ever-increasing angle of sideslip Largely controlled by rudder Spiral divergence Spiral divergence tends to gradual spiraling motion & leads to high speed spiral dive Non oscillatory divergent motion Largely controlled by ailerons 17
18 Lateral Dynamic Instabilities Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Dutch roll oscillation Coupled directional-spiral oscillation Combination of rolling and yawing oscillation of same frequency but out of phase each other Controlled by using both ailerons and rudders 18
19 Dutch Roll Dynamics State Space Equation: Δ β a11 a12 Δβ b11 b12 Δδ A = r a21 a + 22 Δr b21 b 22 Δδ Δ R Transfer Function Equations: Δβ() s As B () s As ˆ Bˆ β + β Δβ β + β = = Δ δ () s As + Bs + C Δ δ () s As + Bs + C A 2 2 R Δ rs () As+ B Δ rs () As ˆ + Bˆ = = Δ δ () s As + Bs + C Δ () s As + Bs + C A r r r r 2 2 δr 19
20 Automatic Flight Control Systems: An Overview Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
21 ADVANCEDCONTROLSYSTEMDESIGN 21
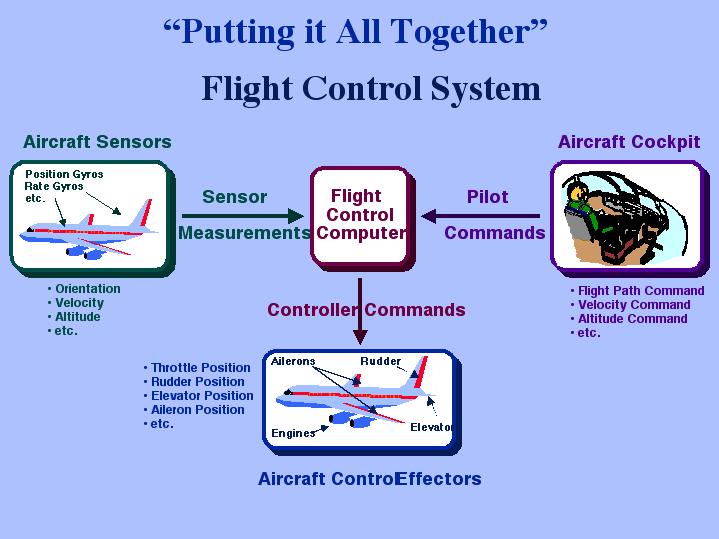
22 Sensors Altimeter: Height above sea level Air Data System: Airspeed, Angle of Attack, Mach No., Air Temperature etc. Magnetometer: Heading Inertial Navigation System (INS) Accelerometers: Translational motion of the aircraft in the three axes Gyroscopes: Rotational motion of the aircraft in the three axes GPS: Accurate position, ground speed The transfer function for most sensors can be approximated by a gain k 22
23 Actuators Electrical actuators: Its a second order system in general It can be approximated to a first order system with small angle displacements Hydraulic / Pneumatic actuators First order system Combination of the above 23
24 Applications of Automatic Flight Control Systems Cruise Control Systems Attitude control (to maintain pitch, roll and heading) Altitude hold (to maintain a desired altitude) Speed control (to maintain constant speed or Mach no.) Stability Augmentation Systems Stability enhancement Handling quality enhancement Landing Aids Alignment control (to align wrt. runway centre line) Glideslope control Flare control 24
25 Techniques for Autopilot Design Frequency domain techniques: Root locus Bode plot Nyquist plot PID design etc. Time domain techniques: Pole placement design Lyapunov design Optimal control design etc. 25
26 Automatic Flight Control Systems: Frequency Domain Designs Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
27 Velocity Hold Control System Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, The forward speed of an airplane can be controlled by changing the thrust produced by propulsion system. The function of the speed control system is to maintain the some desired flight speed. 27
28 Attitude Control System Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Sense the angular position Compare the angular position with the desired angular position Generate commands proportional to the error signal 28
29 Roll Attitude Autopilot Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Components: Model for roll dynamics (transfer function) Attitude gyro Comparator Aileron actuator Reference: R. C. Nelson: Flight Stability and Automatic Control, McGraw-Hill,
30 Roll Attitude Autopilot Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Problem: Design a roll attitude control system to maintain a wings level attitude for a vehicle having the following characteristics. L = 0.5 rad / s L = 2.0 / s p δ a The system performance is to have damping ratio ζ = and an undamped natural frequency ω n = 10 rad/s. 2 Assume the aileron actuator and the sensor (gyro) can be represented by the gains k a and k s 30
31 Roll Attitude Autopilot Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, The system transfer function Δφ() s Lδ a = Δδ () s s( s L ) a p Forward path transfer function Δδa() s Δφ() s Lδ a Gs () = = ka es () Δδ () s ss ( L) a H() s = k = 1 (unity feedback assumption) s p The loop transfer function GsHs () () = k, where ss ( + 0.5) k = kal δ a 31
32 Roll Attitude Autopilot Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, The desired damping needed is ζ = We know ζ = cos θ. Hence, 0 draw a line of 45 from the origin. Any root intersecting this line will have ζ = Gain is determined from: k s s+ 0.5 = 1, This leads to k = However, ω = 0.35 rad / s (much lower than desired!) n 32
33 Roll Attitude Autopilot Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, desired achieved Moving pole P to P is impractical, unless there is an increase in wingspan of the aircraft..! 1 2 Hence, the cure is to have a stability augmentation system. 33
34 Roll Attitude Autopilot Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Compensator is added in form of rate feedback loop to meet desired damping and natural frequency. The inner loop transfer function can be expressed as follows: Transfer function of inner loop Δps () Lδ a = Δδ () s ( s L ) a kil Gs () IL =, Hs () IL = 1( krg), kil = kaslδ a s Gs () IL M(s) IL = 1 + Gs ( ) ILHs ( ) kil = s k p IL IL 34
35 Roll Attitude Autopilot Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Inner loop gain is selected to move the augmented root farther on the negative real axis. If the inner loop is located at s = 14.14, then the root locus will shift to the left and desired ξ and ω can be achieved. n 35
36 Stability Augmentation System (SAS) Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Inherent stability of an airplane depends on the aerodynamic stability derivatives. Magnitude of derivatives affects both damping and frequency of the longitudinal and lateral motion of an airplane. Derivatives are function of the flying characteristics which change during the entire flight envelope. Control systems which provide artificial stability to an airplane having undesirable flying characteristics are commonly called as stability augmentation systems. 36
37 Example: SAS Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Consider an aircraft with poor short period dynamic characteristics. Assume one degree of freedom (only pitching motion about CG) to demonstrate the SAS. Short period dynamics: ( q ) θ M + M θ + M θ = M δ α α δ Substituting the numerical values θ θ θ = 6.71δ e This leads to ζ = ω = 2.34 rad / s sp nsp It is seen that the airplane has poor damping (flying quality). 37
38 Example: SAS Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, One way to improve damping is to provide rate feedback. Artificial damping is provided by producing an elevator deflection in proportion to pitch rate and then adding it to the pilot's input; i.e. δe = δ ep + k θ Pilot input Artificial command Rate gyro measures the θ and creates an electrical signal to provide k θ in addtion to δe. With this, the modified dynamics becomes: θ θ θ = 6.71δ ( k ) 2 2ζωn = k, ωn = 5.49 Hence, by varying k, the desired damping is achieved. e 38
39 Landing System Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill, Key Components: Alignment control (to align wrt. runway centre line) Glideslope control Flare control 39
40 Alignment Control Through Electronic Aid and Pilot Input Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill,
41 Glide Slope: Pitch Control Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill,
42 Glide Slope: Speed Control Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill,
43 Flare: Sink Rate Control Reference: R. C. Nelson, Flight Stability and Automatic Control, McGraw-Hill,
44 44
DESIGN PROJECT REPORT: Longitudinal and lateral-directional stability augmentation of Boeing 747 for cruise flight condition.
 DESIGN PROJECT REPORT: Longitudinal and lateral-directional stability augmentation of Boeing 747 for cruise flight condition. Prepared By: Kushal Shah Advisor: Professor John Hodgkinson Graduate Advisor:
DESIGN PROJECT REPORT: Longitudinal and lateral-directional stability augmentation of Boeing 747 for cruise flight condition. Prepared By: Kushal Shah Advisor: Professor John Hodgkinson Graduate Advisor:
Optimal Control, Guidance and Estimation. Lecture 17. Overview of Flight Dynamics III. Prof. Radhakant Padhi. Prof.
 Optimal Control, Guidance and Estimation Lecture 17 Overview of Flight Dynamics III Prof. adhakant Padhi Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Six DOF Model Prof. adhakant
Optimal Control, Guidance and Estimation Lecture 17 Overview of Flight Dynamics III Prof. adhakant Padhi Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Six DOF Model Prof. adhakant
Lecture 11 Overview of Flight Dynamics I. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 11 Overview of Flight Dynamics I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Dr. Radhakant Padhi Asst. Professor
Lecture 11 Overview of Flight Dynamics I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Dr. Radhakant Padhi Asst. Professor
Localizer Hold Autopilot
 Localizer Hold Autopilot Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Localizer hold autopilot is one of the important
Localizer Hold Autopilot Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Localizer hold autopilot is one of the important
Flying Qualities Criteria Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018
 Flying Qualities Criteria Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives MIL-F-8785C criteria CAP, C*, and other longitudinal criteria ϕ/β, ω ϕ /ω d, and other lateral-directional
Flying Qualities Criteria Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives MIL-F-8785C criteria CAP, C*, and other longitudinal criteria ϕ/β, ω ϕ /ω d, and other lateral-directional
Optimal Control, Guidance and Estimation. Lecture 16. Overview of Flight Dynamics II. Prof. Radhakant Padhi. Prof. Radhakant Padhi
 Optimal Control, Guidance and Estimation Lecture 16 Overview of Flight Dynamics II Prof. Radhakant Padhi Dept. of erospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Prof.
Optimal Control, Guidance and Estimation Lecture 16 Overview of Flight Dynamics II Prof. Radhakant Padhi Dept. of erospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Prof.
April 15, 2011 Sample Quiz and Exam Questions D. A. Caughey Page 1 of 9
 April 15, 2011 Sample Quiz Exam Questions D. A. Caughey Page 1 of 9 These pages include virtually all Quiz, Midterm, Final Examination questions I have used in M&AE 5070 over the years. Note that some
April 15, 2011 Sample Quiz Exam Questions D. A. Caughey Page 1 of 9 These pages include virtually all Quiz, Midterm, Final Examination questions I have used in M&AE 5070 over the years. Note that some
Introduction to Flight Dynamics
 Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
Lecture #AC 3. Aircraft Lateral Dynamics. Spiral, Roll, and Dutch Roll Modes
 Lecture #AC 3 Aircraft Lateral Dynamics Spiral, Roll, and Dutch Roll Modes Copy right 2003 by Jon at h an H ow 1 Spring 2003 16.61 AC 3 2 Aircraft Lateral Dynamics Using a procedure similar to the longitudinal
Lecture #AC 3 Aircraft Lateral Dynamics Spiral, Roll, and Dutch Roll Modes Copy right 2003 by Jon at h an H ow 1 Spring 2003 16.61 AC 3 2 Aircraft Lateral Dynamics Using a procedure similar to the longitudinal
Aircraft Flight Dynamics & Vortex Lattice Codes
 Aircraft Flight Dynamics Vortex Lattice Codes AA241X April 14 2014 Stanford University Overview 1. Equations of motion 2. Non-dimensional EOM Aerodynamics 3. Trim Analysis Longitudinal Lateral 4. Linearized
Aircraft Flight Dynamics Vortex Lattice Codes AA241X April 14 2014 Stanford University Overview 1. Equations of motion 2. Non-dimensional EOM Aerodynamics 3. Trim Analysis Longitudinal Lateral 4. Linearized
Chapter 4 The Equations of Motion
 Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Aim. Unit abstract. Learning outcomes. QCF level: 6 Credit value: 15
 Unit T23: Flight Dynamics Unit code: J/504/0132 QCF level: 6 Credit value: 15 Aim The aim of this unit is to develop learners understanding of aircraft flight dynamic principles by considering and analysing
Unit T23: Flight Dynamics Unit code: J/504/0132 QCF level: 6 Credit value: 15 Aim The aim of this unit is to develop learners understanding of aircraft flight dynamic principles by considering and analysing
AE Stability and Control of Aerospace Vehicles
 AE 430 - Stability and Control of Aerospace Vehicles Aircraft Equations of Motion Dynamic Stability Degree of dynamic stability: time it takes the motion to damp to half or to double the amplitude of its
AE 430 - Stability and Control of Aerospace Vehicles Aircraft Equations of Motion Dynamic Stability Degree of dynamic stability: time it takes the motion to damp to half or to double the amplitude of its
Pitch Control of Flight System using Dynamic Inversion and PID Controller
 Pitch Control of Flight System using Dynamic Inversion and PID Controller Jisha Shaji Dept. of Electrical &Electronics Engineering Mar Baselios College of Engineering & Technology Thiruvananthapuram, India
Pitch Control of Flight System using Dynamic Inversion and PID Controller Jisha Shaji Dept. of Electrical &Electronics Engineering Mar Baselios College of Engineering & Technology Thiruvananthapuram, India
What is flight dynamics? AE540: Flight Dynamics and Control I. What is flight control? Is the study of aircraft motion and its characteristics.
 KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
Chapter 1 Lecture 2. Introduction 2. Topics. Chapter-1
 Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
Chapter 8 Dynamic stability analysis II Longitudinal motion (Lectures 28 to 32)
") Chapter 8 Dynamic stability analysis II Longitudinal motion (Lectures 28 to 32) Keywords : Stability quartic or characteristic equation for longitudinal motion and its solution ; roots of characteristic
Chapter 8 Dynamic stability analysis II Longitudinal motion (Lectures 28 to 32) Keywords : Stability quartic or characteristic equation for longitudinal motion and its solution ; roots of characteristic
Flight Dynamics and Control. Lecture 3: Longitudinal stability Derivatives G. Dimitriadis University of Liege
 Flight Dynamics and Control Lecture 3: Longitudinal stability Derivatives G. Dimitriadis University of Liege Previously on AERO0003-1 We developed linearized equations of motion Longitudinal direction
Flight Dynamics and Control Lecture 3: Longitudinal stability Derivatives G. Dimitriadis University of Liege Previously on AERO0003-1 We developed linearized equations of motion Longitudinal direction
Lecture 6 Classical Control Overview IV. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
Lecture 6 Classical Control Overview IV Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Lead Lag Compensator Design Dr. Radhakant Padhi Asst.
Mechanics of Flight. Warren F. Phillips. John Wiley & Sons, Inc. Professor Mechanical and Aerospace Engineering Utah State University WILEY
 Mechanics of Flight Warren F. Phillips Professor Mechanical and Aerospace Engineering Utah State University WILEY John Wiley & Sons, Inc. CONTENTS Preface Acknowledgments xi xiii 1. Overview of Aerodynamics
Mechanics of Flight Warren F. Phillips Professor Mechanical and Aerospace Engineering Utah State University WILEY John Wiley & Sons, Inc. CONTENTS Preface Acknowledgments xi xiii 1. Overview of Aerodynamics
Fault-Tolerant Control of a Unmanned Aerial Vehicle with Partial Wing Loss
 Preprints of the 19th World Congress The International Federation of Automatic Control Fault-Tolerant Control of a Unmanned Aerial Vehicle with Partial Wing Loss Wiaan Beeton J.A.A. Engelbrecht Stellenbosch
Preprints of the 19th World Congress The International Federation of Automatic Control Fault-Tolerant Control of a Unmanned Aerial Vehicle with Partial Wing Loss Wiaan Beeton J.A.A. Engelbrecht Stellenbosch
Equations of Motion for Micro Air Vehicles
 Equations of Motion for Micro Air Vehicles September, 005 Randal W. Beard, Associate Professor Department of Electrical and Computer Engineering Brigham Young University Provo, Utah 84604 USA voice: (80
Equations of Motion for Micro Air Vehicles September, 005 Randal W. Beard, Associate Professor Department of Electrical and Computer Engineering Brigham Young University Provo, Utah 84604 USA voice: (80
Longitudinal Automatic landing System - Design for CHARLIE Aircraft by Root-Locus
 International Journal of Scientific and Research Publications, Volume 3, Issue 7, July 2013 1 Longitudinal Automatic landing System - Design for CHARLIE Aircraft by Root-Locus Gaber El-Saady, El-Nobi A.Ibrahim,
International Journal of Scientific and Research Publications, Volume 3, Issue 7, July 2013 1 Longitudinal Automatic landing System - Design for CHARLIE Aircraft by Root-Locus Gaber El-Saady, El-Nobi A.Ibrahim,
Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010
 Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010 Problem 1: Control of Short Period Dynamics Consider the
Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010 Problem 1: Control of Short Period Dynamics Consider the
FLIGHT DYNAMICS. Robert F. Stengel. Princeton University Press Princeton and Oxford
 FLIGHT DYNAMICS Robert F. Stengel Princeton University Press Princeton and Oxford Preface XV Chapter One Introduction 1 1.1 ELEMENTS OF THE AIRPLANE 1 Airframe Components 1 Propulsion Systems 4 1.2 REPRESENTATIVE
FLIGHT DYNAMICS Robert F. Stengel Princeton University Press Princeton and Oxford Preface XV Chapter One Introduction 1 1.1 ELEMENTS OF THE AIRPLANE 1 Airframe Components 1 Propulsion Systems 4 1.2 REPRESENTATIVE
Flight Dynamics, Simulation, and Control
 Flight Dynamics, Simulation, and Control For Rigid and Flexible Aircraft Ranjan Vepa CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an
Flight Dynamics, Simulation, and Control For Rigid and Flexible Aircraft Ranjan Vepa CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an
Mech 6091 Flight Control System Course Project. Team Member: Bai, Jing Cui, Yi Wang, Xiaoli
 Mech 6091 Flight Control System Course Project Team Member: Bai, Jing Cui, Yi Wang, Xiaoli Outline 1. Linearization of Nonlinear F-16 Model 2. Longitudinal SAS and Autopilot Design 3. Lateral SAS and Autopilot
Mech 6091 Flight Control System Course Project Team Member: Bai, Jing Cui, Yi Wang, Xiaoli Outline 1. Linearization of Nonlinear F-16 Model 2. Longitudinal SAS and Autopilot Design 3. Lateral SAS and Autopilot
Aircraft Stability & Control
 Aircraft Stability & Control Textbook Automatic control of Aircraft and missiles 2 nd Edition by John H Blakelock References Aircraft Dynamics and Automatic Control - McRuler & Ashkenas Aerodynamics, Aeronautics
Aircraft Stability & Control Textbook Automatic control of Aircraft and missiles 2 nd Edition by John H Blakelock References Aircraft Dynamics and Automatic Control - McRuler & Ashkenas Aerodynamics, Aeronautics
ANALYSIS OF AUTOPILOT SYSTEM BASED ON BANK ANGLE OF SMALL UAV
 ANALYSIS OF AUTOPILOT SYSTEM BASED ON BANK ANGLE OF SMALL UAV MAY SAN HLAING, ZAW MIN NAING, 3 MAUNG MAUNG LATT, 4 HLA MYO TUN,4 Department of Electronic Engineering, Mandalay Technological University,
ANALYSIS OF AUTOPILOT SYSTEM BASED ON BANK ANGLE OF SMALL UAV MAY SAN HLAING, ZAW MIN NAING, 3 MAUNG MAUNG LATT, 4 HLA MYO TUN,4 Department of Electronic Engineering, Mandalay Technological University,
Time Response of Linear, Time-Invariant (LTI) Systems Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018
 Systems Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018") Time Response of Linear, Time-Invariant LTI Systems Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives Methods of time-domain analysis Continuous- and discrete-time models Transient
Time Response of Linear, Time-Invariant LTI Systems Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives Methods of time-domain analysis Continuous- and discrete-time models Transient
Investigating the Performance of Adaptive Methods in application to Autopilot of General aviation Aircraft
 I J C T A, 8(5), 2015, pp 2423-2431 International Science Press Investigating the Performance of Adaptive Methods in application to Autopilot of General aviation Aircraft V Rajesari 1 and L Padma Suresh
I J C T A, 8(5), 2015, pp 2423-2431 International Science Press Investigating the Performance of Adaptive Methods in application to Autopilot of General aviation Aircraft V Rajesari 1 and L Padma Suresh
MAV Unsteady Characteristics in-flight Measurement with the Help of SmartAP Autopilot
 MAV Unsteady Characteristics in-flight Measurement with the Help of SmartAP Autopilot S. Serokhvostov, N. Pushchin and K. Shilov Moscow Institute of Physics and Technology Department of Aeromechanics and
MAV Unsteady Characteristics in-flight Measurement with the Help of SmartAP Autopilot S. Serokhvostov, N. Pushchin and K. Shilov Moscow Institute of Physics and Technology Department of Aeromechanics and
Fundamentals of Airplane Flight Mechanics
 David G. Hull Fundamentals of Airplane Flight Mechanics With 125 Figures and 25 Tables y Springer Introduction to Airplane Flight Mechanics 1 1.1 Airframe Anatomy 2 1.2 Engine Anatomy 5 1.3 Equations of
David G. Hull Fundamentals of Airplane Flight Mechanics With 125 Figures and 25 Tables y Springer Introduction to Airplane Flight Mechanics 1 1.1 Airframe Anatomy 2 1.2 Engine Anatomy 5 1.3 Equations of
A SIMPLIFIED ANALYSIS OF NONLINEAR LONGITUDINAL DYNAMICS AND CONCEPTUAL CONTROL SYSTEM DESIGN
 A SIMPLIFIED ANALYSIS OF NONLINEAR LONGITUDINAL DYNAMICS AND CONCEPTUAL CONTROL SYSTEM DESIGN ROBBIE BUNGE 1. Introduction The longitudinal dynamics of fixed-wing aircraft are a case in which classical
A SIMPLIFIED ANALYSIS OF NONLINEAR LONGITUDINAL DYNAMICS AND CONCEPTUAL CONTROL SYSTEM DESIGN ROBBIE BUNGE 1. Introduction The longitudinal dynamics of fixed-wing aircraft are a case in which classical
Experimental Aircraft Parameter Estimation
 Experimental Aircraft Parameter Estimation AA241X May 14 2014 Stanford University Overview 1. System & Parameter Identification 2. Energy Performance Estimation Propulsion OFF Propulsion ON 3. Stability
Experimental Aircraft Parameter Estimation AA241X May 14 2014 Stanford University Overview 1. System & Parameter Identification 2. Energy Performance Estimation Propulsion OFF Propulsion ON 3. Stability
Digital Autoland Control Laws Using Direct Digital Design and Quantitative Feedback Theory
 AIAA Guidance, Navigation, and Control Conference and Exhibit 1-4 August 6, Keystone, Colorado AIAA 6-699 Digital Autoland Control Laws Using Direct Digital Design and Quantitative Feedback Theory Thomas
AIAA Guidance, Navigation, and Control Conference and Exhibit 1-4 August 6, Keystone, Colorado AIAA 6-699 Digital Autoland Control Laws Using Direct Digital Design and Quantitative Feedback Theory Thomas
Linear Flight Control Techniques for Unmanned Aerial Vehicles
 Chapter 1 Linear Flight Control Techniques for Unmanned Aerial Vehicles Jonathan P. How, Emilio Frazzoli, and Girish Chowdhary August 2, 2012 1 Abstract This chapter presents an overview of linear flight
Chapter 1 Linear Flight Control Techniques for Unmanned Aerial Vehicles Jonathan P. How, Emilio Frazzoli, and Girish Chowdhary August 2, 2012 1 Abstract This chapter presents an overview of linear flight
AMME3500: System Dynamics & Control
 Stefan B. Williams May, 211 AMME35: System Dynamics & Control Assignment 4 Note: This assignment contributes 15% towards your final mark. This assignment is due at 4pm on Monday, May 3 th during Week 13
Stefan B. Williams May, 211 AMME35: System Dynamics & Control Assignment 4 Note: This assignment contributes 15% towards your final mark. This assignment is due at 4pm on Monday, May 3 th during Week 13
DYNAMIC MODELING AND STABILITY ANALYSIS OF A HIGH ALTITUDE AIRSHIP
 DYNAMIC MODELING AND STABILITY ANALYSIS OF A HIGH ALTITUDE AIRSHIP Ramesh Hun 1, Nandan K Sinha 2, Debasish Chakraborti 3 and P.Balasubramanian 4 1 Research Scholar and Corresponding author, 2 Professor,
DYNAMIC MODELING AND STABILITY ANALYSIS OF A HIGH ALTITUDE AIRSHIP Ramesh Hun 1, Nandan K Sinha 2, Debasish Chakraborti 3 and P.Balasubramanian 4 1 Research Scholar and Corresponding author, 2 Professor,
Lecture AC-1. Aircraft Dynamics. Copy right 2003 by Jon at h an H ow
 Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft
 Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft Naoharu Yoshitani 1, Shin-ichi Hashimoto 2, Takehiro Kimura 3, Kazuki Motohashi 2 and Shoh Ueno 4 1 Dept. of Aerospace Engineering, Teikyo
Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft Naoharu Yoshitani 1, Shin-ichi Hashimoto 2, Takehiro Kimura 3, Kazuki Motohashi 2 and Shoh Ueno 4 1 Dept. of Aerospace Engineering, Teikyo
16.333: Lecture # 14. Equations of Motion in a Nonuniform Atmosphere. Gusts and Winds
 16.333: Lecture # 14 Equations of Motion in a Nonuniform Atmosphere Gusts and Winds 1 Fall 2004 16.333 12 2 Equations of Motion Analysis to date has assumed that the atmosphere is calm and fixed Rarely
16.333: Lecture # 14 Equations of Motion in a Nonuniform Atmosphere Gusts and Winds 1 Fall 2004 16.333 12 2 Equations of Motion Analysis to date has assumed that the atmosphere is calm and fixed Rarely
Flight Dynamics and Control
 Flight Dynamics and Control Lecture 1: Introduction G. Dimitriadis University of Liege Reference material Lecture Notes Flight Dynamics Principles, M.V. Cook, Arnold, 1997 Fundamentals of Airplane Flight
Flight Dynamics and Control Lecture 1: Introduction G. Dimitriadis University of Liege Reference material Lecture Notes Flight Dynamics Principles, M.V. Cook, Arnold, 1997 Fundamentals of Airplane Flight
Frequency Domain System Identification for a Small, Low-Cost, Fixed-Wing UAV
 Frequency Domain System Identification for a Small, Low-Cost, Fixed-Wing UAV Andrei Dorobantu, Austin M. Murch, Bernie Mettler, and Gary J. Balas, Department of Aerospace Engineering & Mechanics University
Frequency Domain System Identification for a Small, Low-Cost, Fixed-Wing UAV Andrei Dorobantu, Austin M. Murch, Bernie Mettler, and Gary J. Balas, Department of Aerospace Engineering & Mechanics University
Direct spatial motion simulation of aircraft subjected to engine failure
 Direct spatial motion simulation of aircraft subjected to engine failure Yassir ABBAS*,1, Mohammed MADBOULI 2, Gamal EL-BAYOUMI 2 *Corresponding author *,1 Aeronautical Engineering Department, Engineering
Direct spatial motion simulation of aircraft subjected to engine failure Yassir ABBAS*,1, Mohammed MADBOULI 2, Gamal EL-BAYOUMI 2 *Corresponding author *,1 Aeronautical Engineering Department, Engineering
FAULT-TOLERANT NONLINEAR FLIGHT CONTROL
 Proceedings of COBEM Copyright by ABCM st Brazilian Congress of Mechanical Engineering October 4-8,, Natal, RN, Brazil FAULT-TOLERANT NONLINEAR FLIGHT CONTROL Filipe Alves Pereira da Silva, filipe.alves@gmail.com
Proceedings of COBEM Copyright by ABCM st Brazilian Congress of Mechanical Engineering October 4-8,, Natal, RN, Brazil FAULT-TOLERANT NONLINEAR FLIGHT CONTROL Filipe Alves Pereira da Silva, filipe.alves@gmail.com
AE Stability and Control of Aerospace Vehicles
 AE 430 - Stability and ontrol of Aerospace Vehicles Static/Dynamic Stability Longitudinal Static Stability Static Stability We begin ith the concept of Equilibrium (Trim). Equilibrium is a state of an
AE 430 - Stability and ontrol of Aerospace Vehicles Static/Dynamic Stability Longitudinal Static Stability Static Stability We begin ith the concept of Equilibrium (Trim). Equilibrium is a state of an
AM25 UNMANNED AIR VEHICLE FLIGHT CONTROL
 AM25 UNMANNED AIR VEHICLE FLIGHT CONTROL submitted by LOW JUN HORNG Department of Mechanical Engineering In partial fulfillment of the requirements for the Degree of Bachelor of Engineering National University
AM25 UNMANNED AIR VEHICLE FLIGHT CONTROL submitted by LOW JUN HORNG Department of Mechanical Engineering In partial fulfillment of the requirements for the Degree of Bachelor of Engineering National University
Dynamic Modeling of Fixed-Wing UAVs
 Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
Lecture 5 Classical Control Overview III. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
Autopilot design for small fixed wing aerial vehicles. Randy Beard Brigham Young University
 Autopilot design for small fixed wing aerial vehicles Randy Beard Brigham Young University Outline Control architecture Low level autopilot loops Path following Dubins airplane paths and path management
Autopilot design for small fixed wing aerial vehicles Randy Beard Brigham Young University Outline Control architecture Low level autopilot loops Path following Dubins airplane paths and path management
Chapter 5 Performance analysis I Steady level flight (Lectures 17 to 20) Keywords: Steady level flight equations of motion, minimum power required,
 Keywords: Steady level flight equations of motion, minimum power required,") Chapter 5 Performance analysis I Steady level flight (Lectures 17 to 20) Keywords: Steady level flight equations of motion, minimum power required, minimum thrust required, minimum speed, maximum speed;
Chapter 5 Performance analysis I Steady level flight (Lectures 17 to 20) Keywords: Steady level flight equations of motion, minimum power required, minimum thrust required, minimum speed, maximum speed;
CHAPTER 1. Introduction
 CHAPTER 1 Introduction Linear geometric control theory was initiated in the beginning of the 1970 s, see for example, [1, 7]. A good summary of the subject is the book by Wonham [17]. The term geometric
CHAPTER 1 Introduction Linear geometric control theory was initiated in the beginning of the 1970 s, see for example, [1, 7]. A good summary of the subject is the book by Wonham [17]. The term geometric
Dynamics and Control Preliminary Examination Topics
 Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Chapter 1 Introduction (Lectures 1,2 and 3)
") Chapter 1 Introduction (Lectures 1,2 and 3) Keywords : Importance of stability and control analysis ; brief historical background ; basic concepts static stability, dynamic stability, longitudinal, lateral
Chapter 1 Introduction (Lectures 1,2 and 3) Keywords : Importance of stability and control analysis ; brief historical background ; basic concepts static stability, dynamic stability, longitudinal, lateral
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
Distributed Coordination and Control Experiments on a Multi UAV Testbed. Ellis T. King
 Distributed Coordination and Control Experiments on a Multi UAV Testbed by Ellis T. King Bachelor of Engineering The State University of Buffalo, 22 Submitted to the Department of Aeronautics and Astronautics
Distributed Coordination and Control Experiments on a Multi UAV Testbed by Ellis T. King Bachelor of Engineering The State University of Buffalo, 22 Submitted to the Department of Aeronautics and Astronautics
Problem 1: Ship Path-Following Control System (35%)
") Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.
Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.
LONGITUDINAL STABILITY AUGMENTATION DESIGN WITH TWO DEGREE OF FREEDOM CONTROL STRUCTURE AND HANDLING QUALITIES REQUIREMENTS
 LONGITUDINAL STABILITY AUGMENTATION DESIGN WITH TWO DEGREE OF FREEDOM CONTROL STRUCTURE AND HANDLING QUALITIES REQUIREMENTS Francisco J. Triveno Vargas, Fernando J. O. Moreira, Pedro Paglione *EMBRAER,
LONGITUDINAL STABILITY AUGMENTATION DESIGN WITH TWO DEGREE OF FREEDOM CONTROL STRUCTURE AND HANDLING QUALITIES REQUIREMENTS Francisco J. Triveno Vargas, Fernando J. O. Moreira, Pedro Paglione *EMBRAER,
UAV Coordinate Frames and Rigid Body Dynamics
 Brigham Young University BYU ScholarsArchive All Faculty Publications 24-- UAV oordinate Frames and Rigid Body Dynamics Randal Beard beard@byu.edu Follow this and additional works at: https://scholarsarchive.byu.edu/facpub
Brigham Young University BYU ScholarsArchive All Faculty Publications 24-- UAV oordinate Frames and Rigid Body Dynamics Randal Beard beard@byu.edu Follow this and additional works at: https://scholarsarchive.byu.edu/facpub
Non-linear Dynamic Inversion
 Control of Unmanned Aerial Vehicles using Non-linear Dynamic Inversion Master s Thesis Division of Automatic Control Department of Electrical Engineering Linköping University Mia Karlsson LiTH-ISY-EX-3-
Control of Unmanned Aerial Vehicles using Non-linear Dynamic Inversion Master s Thesis Division of Automatic Control Department of Electrical Engineering Linköping University Mia Karlsson LiTH-ISY-EX-3-
AFRL MACCCS Review. Adaptive Control of the Generic Hypersonic Vehicle
 AFRL MACCCS Review of the Generic Hypersonic Vehicle PI: Active- Laboratory Department of Mechanical Engineering Massachusetts Institute of Technology September 19, 2012, MIT AACL 1/38 Our Team MIT Team
AFRL MACCCS Review of the Generic Hypersonic Vehicle PI: Active- Laboratory Department of Mechanical Engineering Massachusetts Institute of Technology September 19, 2012, MIT AACL 1/38 Our Team MIT Team
Design, Analysis and Research Corporation (DARcorporation) ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I
 ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I") Design, Analysis and Research Corporation (DARcorporation) ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I Copyright 00 by Dr. Jan Roskam Year of Print, 00 (Errata Revised August
Design, Analysis and Research Corporation (DARcorporation) ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I Copyright 00 by Dr. Jan Roskam Year of Print, 00 (Errata Revised August
The spectacle of a rolling aircraft close to the tarmac invariably draws a standing ovation during
 Approximating the rolling aircraft J G Manathara & S Pradeep Department of Aerospace Engineering, Indian Institute of Science, Bangalore A R T I C L E I N F O Unpublished manuscript. A B S T R A C T This
Approximating the rolling aircraft J G Manathara & S Pradeep Department of Aerospace Engineering, Indian Institute of Science, Bangalore A R T I C L E I N F O Unpublished manuscript. A B S T R A C T This
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 e are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,8 116, 12M Open access books available International authors and editors Downloads Our authors
e are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,8 116, 12M Open access books available International authors and editors Downloads Our authors
Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018
 Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 018 Learning Objectives 6 th -order -> 4 th -order -> hybrid equations Dynamic stability derivatives Long-period
Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 018 Learning Objectives 6 th -order -> 4 th -order -> hybrid equations Dynamic stability derivatives Long-period
Stability and Control Analysis in Twin-Boom Vertical Stabilizer Unmanned Aerial Vehicle (UAV)
") International Journal of Scientific and Research Publications, Volume 4, Issue 2, February 2014 1 Stability and Control Analysis in Twin-Boom Vertical Stabilizer Unmanned Aerial Vehicle UAV Lasantha Kurukularachchi*;
International Journal of Scientific and Research Publications, Volume 4, Issue 2, February 2014 1 Stability and Control Analysis in Twin-Boom Vertical Stabilizer Unmanned Aerial Vehicle UAV Lasantha Kurukularachchi*;
Aircraft Equations of Motion: Translation and Rotation Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018
 Aircraft Equations of Motion: Translation and Rotation Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018 Learning Objectives What use are the equations of motion? How is the angular orientation of
Aircraft Equations of Motion: Translation and Rotation Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018 Learning Objectives What use are the equations of motion? How is the angular orientation of
Simulation of Non-Linear Flight Control Using Backstepping Method
 Proceedings of the 2 nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7 8, 2015 Paper No. 182 Simulation of Non-Linear Flight Control Using Backstepping
Proceedings of the 2 nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7 8, 2015 Paper No. 182 Simulation of Non-Linear Flight Control Using Backstepping
Turn Performance of an Air-Breathing Hypersonic Vehicle
 Turn Performance of an Air-Breathing Hypersonic Vehicle AIAA Aircraft Flight Mechanics Conference Derek J. Dalle, Sean M. Torrez, James F. Driscoll University of Michigan, Ann Arbor, MI 4809 August 8,
Turn Performance of an Air-Breathing Hypersonic Vehicle AIAA Aircraft Flight Mechanics Conference Derek J. Dalle, Sean M. Torrez, James F. Driscoll University of Michigan, Ann Arbor, MI 4809 August 8,
Longitudinal Flight Control Systems
 Longitudinal Flight Control Systems 9 Basic Longitudinal Autopilots (I) Attitude Control System First idea: A Displacement Autopilot Typical block diagram: Vertical e g e δ Elevator δ A/C θ ref Amplifier
Longitudinal Flight Control Systems 9 Basic Longitudinal Autopilots (I) Attitude Control System First idea: A Displacement Autopilot Typical block diagram: Vertical e g e δ Elevator δ A/C θ ref Amplifier
Modeling of a Small Unmanned Aerial Vehicle
 Modeling of a Small Unmanned Aerial Vehicle A. Elsayed Ahmed, A. Hafez, A. N. Ouda, H. Eldin Hussein Ahmed, H. Mohamed Abd-Elkader Abstract Unmanned aircraft systems (UAS) are playing increasingly prominent
Modeling of a Small Unmanned Aerial Vehicle A. Elsayed Ahmed, A. Hafez, A. N. Ouda, H. Eldin Hussein Ahmed, H. Mohamed Abd-Elkader Abstract Unmanned aircraft systems (UAS) are playing increasingly prominent
Nonlinear Adaptive Flight Control for the X-38 Vehicle
 Nonlinear Adaptive Flight Control for the X-38 Vehicle Elmar M. Wallner and Klaus H. Well Institute of Flight Mechanics and Control University of Stuttgart Pfaffenwaldring 7a, 7569 Stuttgart, Germany klaus.well@ifr.uni-stuttgart.de
Nonlinear Adaptive Flight Control for the X-38 Vehicle Elmar M. Wallner and Klaus H. Well Institute of Flight Mechanics and Control University of Stuttgart Pfaffenwaldring 7a, 7569 Stuttgart, Germany klaus.well@ifr.uni-stuttgart.de
Development and Design of the Landing Guidance and Control System for the S20 UAV
 Development and Design of the Landing Guidance and Control System for the S2 UAV João Pedro Vasconcelos Fonseca da Silva Mechanical Engineering Department Instituto Superior Técnico Av. Rovisco Pais, 149-1
Development and Design of the Landing Guidance and Control System for the S2 UAV João Pedro Vasconcelos Fonseca da Silva Mechanical Engineering Department Instituto Superior Técnico Av. Rovisco Pais, 149-1
MECH 6091 Flight Control Systems Final Course Project
 MECH 6091 Flight Control Systems Final Course Project F-16 Autopilot Design Lizeth Buendia Rodrigo Lezama Daniel Delgado December 16, 2011 1 AGENDA Theoretical Background F-16 Model and Linearization Controller
MECH 6091 Flight Control Systems Final Course Project F-16 Autopilot Design Lizeth Buendia Rodrigo Lezama Daniel Delgado December 16, 2011 1 AGENDA Theoretical Background F-16 Model and Linearization Controller
Linearized Equations of Motion!
 Linearized Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 216 Learning Objectives Develop linear equations to describe small perturbational motions Apply to aircraft dynamic equations
Linearized Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 216 Learning Objectives Develop linear equations to describe small perturbational motions Apply to aircraft dynamic equations
(a) Find the transfer function of the amplifier. Ans.: G(s) =
 Find the transfer function of the amplifier. Ans.: G(s) =") 126 INTRDUCTIN T CNTR ENGINEERING 10( s 1) (a) Find the transfer function of the amplifier. Ans.: (. 02s 1)(. 001s 1) (b) Find the expected percent overshoot for a step input for the closed-loop system
126 INTRDUCTIN T CNTR ENGINEERING 10( s 1) (a) Find the transfer function of the amplifier. Ans.: (. 02s 1)(. 001s 1) (b) Find the expected percent overshoot for a step input for the closed-loop system
Chapter 1. Introduction. 1.1 System Architecture
 Chapter 1 Introduction 1.1 System Architecture The objective of this book is to prepare the reader to do research in the exciting and rapidly developing field of autonomous navigation, guidance, and control
Chapter 1 Introduction 1.1 System Architecture The objective of this book is to prepare the reader to do research in the exciting and rapidly developing field of autonomous navigation, guidance, and control
Control System Design. Risk Assessment
 Control System Design Risk Assessment Using Fuzzy Logic VPI - AOE - 239 Dr. Mark R. Anderson Associate Professor Department of Aerospace and Ocean Engineering Virginia Polytechnic Institute and State University
Control System Design Risk Assessment Using Fuzzy Logic VPI - AOE - 239 Dr. Mark R. Anderson Associate Professor Department of Aerospace and Ocean Engineering Virginia Polytechnic Institute and State University
AUTOMATIC AIRSPACE AVOIDANCE USING ADVANCED FLIGHT CONTROL SYSTEM
 AUTOMATIC AIRSPACE AVOIDANCE USING ADVANCED FLIGHT CONTROL SYSTEM A Thesis by Yakup Gunbatar Bachelor of Sciences in Aerospace Engineering, Middle East Technical University, 23 Submitted to the Department
AUTOMATIC AIRSPACE AVOIDANCE USING ADVANCED FLIGHT CONTROL SYSTEM A Thesis by Yakup Gunbatar Bachelor of Sciences in Aerospace Engineering, Middle East Technical University, 23 Submitted to the Department
Fault-Tolerant Flight Control Using One Aerodynamic Control Surface
 Fault-Tolerant Flight Control Using One Aerodynamic Control Surface Raghu Venkataraman and Peter Seiler University of Minnesota, Minneapolis, Minnesota 55455 This paper considers a statically stable unmanned
Fault-Tolerant Flight Control Using One Aerodynamic Control Surface Raghu Venkataraman and Peter Seiler University of Minnesota, Minneapolis, Minnesota 55455 This paper considers a statically stable unmanned
Spacecraft and Aircraft Dynamics
 Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 11: Longitudinal Dynamics Aircraft Dynamics Lecture 11 In this Lecture we will cover: Longitudinal Dynamics: Finding
Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 11: Longitudinal Dynamics Aircraft Dynamics Lecture 11 In this Lecture we will cover: Longitudinal Dynamics: Finding
AEROSPACE ENGINEERING
 AEROSPACE ENGINEERING Subject Code: AE Course Structure Sections/Units Topics Section A Engineering Mathematics Topics (Core) 1 Linear Algebra 2 Calculus 3 Differential Equations 1 Fourier Series Topics
AEROSPACE ENGINEERING Subject Code: AE Course Structure Sections/Units Topics Section A Engineering Mathematics Topics (Core) 1 Linear Algebra 2 Calculus 3 Differential Equations 1 Fourier Series Topics
Adaptive Augmentation of a Fighter Aircraft Autopilot Using a Nonlinear Reference Model
 Proceedings of the EuroGNC 13, 2nd CEAS Specialist Conference on Guidance, Navigation & Control, Delft University of Technology, Delft, The Netherlands, April -12, 13 Adaptive Augmentation of a Fighter
Proceedings of the EuroGNC 13, 2nd CEAS Specialist Conference on Guidance, Navigation & Control, Delft University of Technology, Delft, The Netherlands, April -12, 13 Adaptive Augmentation of a Fighter
Robot Dynamics - Rotary Wing UAS: Control of a Quadrotor
 Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
Alternative Expressions for the Velocity Vector Velocity restricted to the vertical plane. Longitudinal Equations of Motion
 Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flig Dynamics MAE 33, 008 Separate solutions for nominal and perturbation flig paths Assume that nominal path is steady and in the vertical
Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flig Dynamics MAE 33, 008 Separate solutions for nominal and perturbation flig paths Assume that nominal path is steady and in the vertical
Flight Controller Design for an Autonomous MAV
 Flight Controller Design for an Autonomous MAV Dissertation Submitted in partial fulfillment of the requirements for the Master of Technology Program by Gopinadh Sirigineedi 03301012 Under the guidance
Flight Controller Design for an Autonomous MAV Dissertation Submitted in partial fulfillment of the requirements for the Master of Technology Program by Gopinadh Sirigineedi 03301012 Under the guidance
Flight and Orbital Mechanics
 Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Modeling &Control of Launch Vehicles
 Modeling &Control of Launch Vehicles Presented By: M. V. Dhekane Deputy Director Control Guidance & Simulation Entity, VSSC Perspectives In Dynamical Systems & Control Outline ISRO Missions ISRO Launch
Modeling &Control of Launch Vehicles Presented By: M. V. Dhekane Deputy Director Control Guidance & Simulation Entity, VSSC Perspectives In Dynamical Systems & Control Outline ISRO Missions ISRO Launch
Autonomous Fixed Wing Air Vehicles
 Guidance and Control of Autonomous Fixed Wing Air Vehicles Randal W. Beard Timothy W. McLain Brigham Young University ii Contents Preface vii 1 Introduction 1 1.1 System Architecture..................................
Guidance and Control of Autonomous Fixed Wing Air Vehicles Randal W. Beard Timothy W. McLain Brigham Young University ii Contents Preface vii 1 Introduction 1 1.1 System Architecture..................................
ME 597: AUTONOMOUS MOBILE ROBOTICS SECTION 3 MOTION MODELING. Prof. Steven Waslander
 ME 597: AUTONOMOUS MOBILE ROBOTICS SECTION 3 MOTION MODELING Prof. Steven Waslander COMPONENTS Mission Planning Mission Mapping Mission Autonomy Path Planning Mapping Environmental Autonomy Control Estimation
ME 597: AUTONOMOUS MOBILE ROBOTICS SECTION 3 MOTION MODELING Prof. Steven Waslander COMPONENTS Mission Planning Mission Mapping Mission Autonomy Path Planning Mapping Environmental Autonomy Control Estimation
San José State University Aerospace Engineering Department AE168: Aerospace Vehicle Dynamics & Control Fall 2016
 San José State University Aerospace Engineering Department AE168: Aerospace Vehicle Dynamics & Control Fall 216 Course and Contact Information Instructor: Office Location: Email: Office Hours: Class Days/Time:
San José State University Aerospace Engineering Department AE168: Aerospace Vehicle Dynamics & Control Fall 216 Course and Contact Information Instructor: Office Location: Email: Office Hours: Class Days/Time:
Mechatronics Assignment # 1
 Problem # 1 Consider a closed-loop, rotary, speed-control system with a proportional controller K p, as shown below. The inertia of the rotor is J. The damping coefficient B in mechanical systems is usually
Problem # 1 Consider a closed-loop, rotary, speed-control system with a proportional controller K p, as shown below. The inertia of the rotor is J. The damping coefficient B in mechanical systems is usually
Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein
 7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
16.400/453J Human Factors Engineering. Manual Control I
 J Human Factors Engineering Manual Control I 1 Levels of Control Human Operator Human Operator Human Operator Human Operator Human Operator Display Controller Display Controller Display Controller Display
J Human Factors Engineering Manual Control I 1 Levels of Control Human Operator Human Operator Human Operator Human Operator Human Operator Display Controller Display Controller Display Controller Display
Exam - TTK 4190 Guidance & Control Eksamen - TTK 4190 Fartøysstyring
 Page 1 of 6 Norges teknisk- naturvitenskapelige universitet Institutt for teknisk kybernetikk Faglig kontakt / contact person: Navn: Morten Pedersen, Universitetslektor Tlf.: 41602135 Exam - TTK 4190 Guidance
Page 1 of 6 Norges teknisk- naturvitenskapelige universitet Institutt for teknisk kybernetikk Faglig kontakt / contact person: Navn: Morten Pedersen, Universitetslektor Tlf.: 41602135 Exam - TTK 4190 Guidance
Envelopes for Flight Through Stochastic Gusts
 AIAA Atmospheric Flight Mechanics Conference 08-11 August 2011, Portland, Oregon AIAA 2011-6213 Envelopes for Flight Through Stochastic Gusts Johnhenri R. Richardson, Ella M. Atkins, Pierre T. Kabamba,
AIAA Atmospheric Flight Mechanics Conference 08-11 August 2011, Portland, Oregon AIAA 2011-6213 Envelopes for Flight Through Stochastic Gusts Johnhenri R. Richardson, Ella M. Atkins, Pierre T. Kabamba,
The Utilization of High Fidelity Simulation in the Support of UAV Launch Phase Design: Three Case Studies. M. Mortazavi 1, A.
 JAST. ol. 9, No., pp 4-8 Iranian Aerospace Society, Summer - Fall 1 J AST Journal of Aerospace Science and Technology The Utilization of High Fidelity Simulation in the Support of UA Launch Phase Design:
JAST. ol. 9, No., pp 4-8 Iranian Aerospace Society, Summer - Fall 1 J AST Journal of Aerospace Science and Technology The Utilization of High Fidelity Simulation in the Support of UA Launch Phase Design:
Spacecraft and Aircraft Dynamics
 Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 4: Contributions to Longitudinal Stability Aircraft Dynamics Lecture 4 In this lecture, we will discuss Airfoils:
Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 4: Contributions to Longitudinal Stability Aircraft Dynamics Lecture 4 In this lecture, we will discuss Airfoils: