Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018
|
|
|
- Piers Boyd
- 5 years ago
- Views:
Transcription
 mode Short-period mode Reading: Flight Dynamics 45-464, 48-486 Copyright 018 by Robert Stengel. All rights reserved. For educational use only. http://www.princeton.")
1 Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 018 Learning Objectives 6 th -order -> 4 th -order -> hybrid equations Dynamic stability derivatives Long-period phugoid) mode Short-period mode Reading: Flight Dynamics , Copyright 018 by Robert Stengel. All rights reserved. For educational use only Fairchild-Republic A-10 Nonlinear Dynamic Equations!u = X / m gsinθ qw!w = Z / m + gcosθ + qu!x I = cosθ )u + sinθ )w!z I = sinθ )u + cosθ )w!q = M / I yy!θ = q 6 th -Order Longitudinal Equations of Motion Symmetric aircraft Motions in the vertical plane Flat earth State Vector, 6 components u Axial Velocity w Vertical Velocity x Range z = Altitude ) q Pitch Rate θ Pitch Angle x 1 x x 3 x 4 x 5 x 6 = x Lon6 Range has no dynamic effect Altitude effect is minimal air density variation) 1
2 4 th -Order Longitudinal Equations of Motion Nonlinear Dynamic Equations, neglecting range and altitude!u = f 1 = X / m gsinθ qw!w = f = Z / m + gcosθ + qu!q = f 3 = M / I yy!θ = f 4 = q State Vector, 4 components x 1 x x 3 x 4 = x Lon4 u w = q θ Axial Velocity, m/s Vertical Velocity, m/s Pitch Rate, rad/s Pitch Angle, rad 3 Fourth-Order Hybrid Equations of Motion 4

3 Transform Longitudinal Velocity Components Replace Cartesian body components of velocity by polar inertial components!u = f 1 = X / m gsinθ qw!w = f = Z / m + gcosθ + qu!q = f 3 = M / I yy!θ = f 4 = q x 1 x x 3 x 4 u Axial Velocity w = Vertical Velocity = q Pitch Rate θ Pitch Angle 5 Transform Longitudinal Velocity Components Replace Cartesian body components of velocity by polar inertial components!v = f 1 = T cos α + i! γ = f = T sin α + i ) D mgsinγ ) + L mgcosγ m mv Hawker P117 Kestral!q = f 3 = M / I yy!θ = f 4 = q x 1 x x 3 x 4 V Velocity γ = Flight Path Angle = q Pitch Rate θ Pitch Angle i = Incidence angle of the thrust vector with respect to the centerline 6 3
4 Hybrid Longitudinal Equations of Motion Replace pitch angle by angle of attack α = θ γ!v = f 1 = T cos α + i! γ = f = T sin α + i!q = f 3 = M / I yy!θ = f 4 = q ) D mgsinγ ) + L mgcosγ m mv x 1 x x 3 x 4 V Velocity γ = Flight Path Angle = q Pitch Rate θ Pitch Angle 7 Hybrid Longitudinal Equations of Motion Replace pitch angle by angle of attack α = θ γ!v = f 1 = T cos α + i! γ = f = T sin α + i!q = f 3 = M / I yy ) D mgsinγ ) + L mgcosγ m mv!α =!θ! γ = f 4 = q f = q 1 mv T sin α + i ) + L mgcosγ x 1 x x 3 x 4 V Velocity γ = Flight Path Angle = q Pitch Rate α Angle of Attack θ = α +γ 8 4
5 Why Transform Equations and State Vector? x 1 x x 3 x 4 V γ = = q α Velocity Flight Path Angle Pitch Rate Angle of Attack Velocity and flight path angle typically have slow variations Pitch rate and angle of attack typically have quicker variations Coupling typically small 9 Small Perturbations from Steady Path!xt) =!x N t) + Δ!xt) f[x N t),u N t),w N t),t] + F t)δxt) + G t)δut) + L t)δwt) Steady, Level Flight!x N t) 0 f[x N t),u N t),w N t),t] Δ!xt) FΔxt) + GΔut) + LΔwt) Rates of change are small 10 5
6 Nominal Equations of Motion in Equilibrium Trimmed Condition) x N t) = 0 = f[x N t),u N t),w N t),t] x T N = # γ N 0 α $ N T % = constant T, D, L, and M contain state, control, and disturbance effects! = 0 = f 1 = T cos α N + i! γ N = 0 = f = T sin α N + i ) D mgsinγ N ) + L mgcosγ N m m!q N = 0 = f 3 = M I yy!α N = 0 = f 4 = 0) 1 m ) + L mgcosγ N T sin α N + i 11 Flight Conditions for Steady, Level Flight Nonlinear longitudinal model V = f 1 = 1 m $ % T cos α + i) D mgsinγ ' γ = f = 1 mv $ % T sin α + i) + L mgcosγ ' q = f 3 = M / I yy α = f 4 = θ γ = q 1 mv $ % T sin α + i ) + L mg cosγ ' Nonlinear longitudinal model in equilibrium 0 = f 1 = 1 m $ % T cos α + i) D mgsinγ ' 0 = f = 1 mv $ % T sin α + i ) + L mg cosγ ' 0 = f 3 = M / I yy 0 = f 4 = θ γ = q 1 mv $ % T sin α + i ) + L mg cosγ ' 1 6
cos α + i f =! γ = 1 mv T δt,δ E,θ,h,V )sin α + i N f 3 =!")

7 Numerical Solution for Level Flight Trimmed Condition Specify desired altitude and airspeed, h N and Guess starting values for the trim parameters, δt 0, δe 0, and θ 0 Calculate starting values of f 1, f, and f 3 f 1 =!V = 1 T δt,δ E,θ,h,V m )cos α + i f =! γ = 1 mv T δt,δ E,θ,h,V )sin α + i N f 3 =!q = M δt,δ E,θ,h,V ) / I yy ) D δt,δ E,θ,h,V ) ) + L δt,δ E,θ,h,V ) mg f 1, f, and f 3 = 0 in equilibrium, but not for arbitrary δt 0, δe 0, and θ 0 Define a scalar, positive-definite trim error cost function, e.g., J δt,δe,θ) = a f 1 )+ b f )+ c f 3 ) 13 Minimize the Cost Function with Respect to the Trim Parameters Error cost is bowl-shaped J δt,δe,θ) = a f 1 )+ b f )+ c f 3 ) Cost is minimized at bottom of bowl, i.e., when $ % J δt J δe J θ ' ) = 0 Search to find the minimum value of J 14 7
8 Example of Search for Trimmed Condition Fig , Flight Dynamics) In MATLAB, use fminsearch or fsolve to find trim settings δt *,δe*,θ *) = fminsearch#$ J, δt,δe,θ)% 15 Small Perturbations from Steady Path Approximated by Linear Equations Linearized Equations of Motion Δ!x Lon = Δ!V Δ! γ Δ!q Δ!α = F Lon ΔV Δγ Δq Δα ΔδT + G Lon Δδ E " +" 16 8
9 Linearized Equations of Motion Phugoid Long-Period) Motion Short-Period Motion 17 Approximate Decoupling of Fast and Slow Modes of Motion Hybrid linearized equations allow the two modes to be examined separately = Effects of phugoid perturbations on phugoid motion F Lon = Effects of phugoid perturbations on short-period motion F Ph small F Ph SP F Ph small F SP Effects of short-period perturbations on phugoid motion F SP Ph F SP Effects of short-period perturbations on shortperiod motion F Ph 0 0 F SP 18 9
10 Sensitivity Matrices for Longitudinal LTI Model Δ x Lon t) = F Lon Δx Lon t) + G Lon Δu Lon t) + L Lon Δw Lon t) F Lon = F 11 F 1 F 13 F 14 F 1 F F 3 F 4 F 31 F 3 F 33 F 34 F 41 F 4 F 43 F 44 G Lon = G 11 G 1 G 13 G 1 G G 3 G 31 G 3 G 33 G 41 G 4 G 43 L Lon = L 11 L 1 L 1 L L 31 L 3 L 41 L 4 19 Dimensional Stability and Control Derivatives 0 10
11 Dimensional Stability-Derivative Notation Redefine force and moment symbols as acceleration symbols Dimensional stability derivatives portray acceleration sensitivities to state perturbations Drag mass m) D!V, m/s Lift mass L V! γ, m/s L V! γ, rad/s Moment M!q, rad/s moment of inertia I yy ) 1 Dimensional Stability-Derivative Notation ) ρ N F 11 = D V = D! 1 V m C T V cosα N C DV Thrust and drag effects are combined and represented by one symbol F 4 = L α = L α! 1 m Thrust and lift effects are combined and represented by one symbol S + C TN cosα N C DN )ρ N S C TN cosα N + C Lα ) ρ N S F 34 = M α = M α! 1 ρ mα I yy Sc 11
12 Longitudinal Stability Matrix Effects of phugoid perturbations on phugoid motion Effects of short-period perturbations on phugoid motion! F Lon = # # " F Ph SP F Ph F SP Ph F SP! # # $ # = # # % # # # " D V gcosγ N D q D α L V g sinγ N L q L α M V 0 M q M α L V g sinγ N * 1 L - q, + / L α. $ % Effects of phugoid perturbations on shortperiod motion Effects of short-period perturbations on short-period motion 3 Comparison of nd - and 4 th - Order Model Response 4 1
13 4 th -Order Initial-Condition Responses of Business Jet at Two Time Scales Plotted over different periods of time 4 initial conditions [V0), γ0), q0), α0)] sec Reveals Phugoid Mode 0-6 sec Reveals Short-Period Mode 5 nd -Order Models of Longitudinal Motion Assume off-diagonal blocks of 4 x 4) stability matrix are negligible Approximate Phugoid Equation Δ!V Δ! γ + F Lon = D V T δt L δt L V F Ph ~ 0 ~ 0 F SP Δ!x Ph = ΔδT + gcosγ N g sinγ N D V L V ΔV Δγ ΔV wind 6 13

14 nd -Order Models of Longitudinal Motion F Ph ~ 0 F Lon = ~ 0 F SP Approximate Short-Period Equation Δ!x SP = Δ!q Δ!α + M δ E L δ E M q 1 L q Δδ E + M α L α M α L α Δq Δα Δα wind 7 Comparison of Bizjet 4 th - and nd -Order Model Responses Phugoid Time Scale, ~100 s 4 th Order, 4 initial conditions [V0), γ0), q0), α0)] nd Order, initial conditions [V0), γ0)] 8 14
15 Comparison of Bizjet 4 th - and nd -Order Model Responses Short-Period Time Scale, ~10 s 4 th Order, 4 initial conditions [V0), γ0), q0), α0)] nd Order, initial conditions [q0), α0)] 9 Approximate Phugoid Response to a 10% Thrust Increase What is the steady-state response? 30 15

16 Approximate Short-Period Response to a 0.1-Rad Pitch Control Step Input Pitch Rate, rad/s Angle of Attack, rad What is the steady-state response? 31 Normal Load Factor Response to a 0.1-Rad Pitch Control Step Input Normal load factor at the center of mass Grumman X-9 Δn z = g Δ!α Δq ) = g L α Δα + L δ E Δδ E Pilot focuses on normal load factor during rapid maneuvering Normal Load Factor, g s at c.m. Aft Pitch Control Elevator) Normal Load Factor, g s at c.m. Forward Pitch Control Canard) 3 16





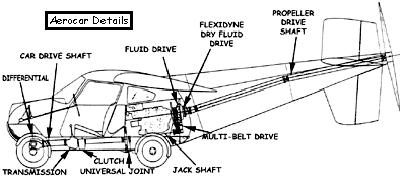


17 Curtiss Autocar, 1917 Waterman Arrowbile, 1935 Stout Skycar, 1931 ConsolidatedVultee 111, 1940s 33 ConvAIRCAR 116 w/crosley auto), 1940s Taylor AirCar, 1950s Hallock Road Wing,









![$400K est)] Date? Cost?](/docs-images/95/125091033/images/18-9.jpg "or, now, for the same")
18 Mitzar SkyMaster Pinto, 1970s Lotus Elise Aerocar, concept, 00 Pinto separated from the airframe. Two killed. Haynes Skyblazer, concept, 004 Proposed, not built. Aeromobil, 014 Proposed, not built. Aircraft entered a spin, ballistic parachute was deployed. No fatality. 35 Terrafugia Transition Terrafugia TF-X, concept [019, $400K est)] Date? Cost? or, now, for the same price Jaguar F Type Tecnam Astore PLUS plus $10K in savings account 36 18

19 Next Time: Lateral-Directional Dynamics Reading: Flight Dynamics Learning Objectives 6 th -order -> 4 th -order -> hybrid equations Dynamic stability derivatives Dutch roll mode Roll and spiral modes 37 Supplemental Material 38 19
20 Elements of the Stability Matrix Stability derivatives portray acceleration sensitivities to state perturbations f 1 V D V ; f 1 γ = gcosγ N ; f 1 q D q ; f 1 α D α f V L V ; f γ = g sinγ N ; f q L q ; f α L α f 3 V M V ; f 3 γ = 0; f 3 q M q ; f 3 α M α f 4 V L V ; f 4 γ = g sinγ N ; f 4 q 1 L q ; f 4 α L α 39 Velocity Dynamics First row of nonlinear equation!v = f 1 = 1 [ T cosα D mgsinγ ] m = 1 m C T cosα ρv S C ρv D S mgsinγ First row of linearized equation [ ] [ ] + [ L 11 ΔV wind + L 1 Δα wind ] Δ!Vt) = F 11 ΔVt) + F 1 Δγ t) + F 13 Δqt) + F 14 Δαt) + G 11 Δδ Et) + G 1 ΔδT t) + G 13 Δδ Ft) 40 0
21 Sensitivity of Velocity Dynamics to State Perturbations % V = ' C T cosα C D ) ρ N F 11 = 1 m C T V cosα N C DV ) ρv Coefficients in first row of F S mgsinγ * m ) S + C TN cosα N C DN )ρ N S F 14 = 1 m F 1 = gcosγ N F 13 = 1 m C D q ρ N S C T N sinα N + C Dα ) ρ N S C TV C DV C Dq C T V C D V C D q C Dα C D α 41 Sensitivity of Velocity Dynamics to Control and Disturbance Perturbations Coefficients in first rows of G and L G 11 = 1 m C D δ E ρ N S G 1 = 1 m C ρ T δt cosα N N S G 13 = 1 m C D δ F ρ N S C TδT C DδE C T δt C D δe L 11 = f 1 V L 1 = f 1 α C DδF C D δf 4 1
22 Flight Path Angle Dynamics Second row of nonlinear equation! γ = f = 1 mv [ T sinα + L mgcosγ ] = 1 mv C T sinα ρv S + C ρv L S mgcosγ Second row of linearized equation [ ] [ ] + [ L 1 ΔV wind + L Δα wind ] Δ γ!t) = F 1 ΔVt) + F Δγ t) + F 3 Δqt) + F 4 Δαt) + G 1 Δδ Et) + G ΔδT t) + G 3 Δδ Ft) 43 Sensitivity of Flight Path Angle Dynamics to State Perturbations % γ = ' C T sinα + C L ) ρv S mgcosγ * mv ) Coefficients in second row of F F 1 = 1 C TV sinα N + C LV m ) ρ N S + C TN sinα N + C LN )ρ N S 1 C TN sinα N + C LN m ) ρ N S mgcosγ N F = gsinγ N C TV C T V F 3 = 1 ρ Lq S mv N F 4 = 1 C TN cosα N + C Lα m ) ρ V N N S C LV C Lq C L V C L q C Lα C L α 44
23 Pitch Rate Dynamics Third row of nonlinear equation q = f 3 = M = C m ρv )Sc I yy I yy Third row of linearized equation [ ] [ ] + [ L 31 ΔV wind + L 3 Δα wind ] Δ!qt) = F 31 ΔVt) + F 3 Δγ t) + F 33 Δqt) + F 34 Δαt) + G 31 Δδ Et) + G 3 ΔδT t) + G 33 Δδ Ft) 45 Sensitivity of Pitch Rate Dynamics to State Perturbations q = C m ρv )Sc I yy Coefficients in third row of F F 31 = 1 ρ mv I yy F 3 = 0 Sc + C mn ρ N Sc F 33 = 1 ρ mq I yy F 34 = 1 ρ mα I yy Sc Sc C mv C mq C mα C m V C m q C m α 46 3
24 Angle of Attack Dynamics Fourth row of nonlinear equation α = f 4 = θ γ = q 1 mv [ T sinα + L mgcosγ ] Fourth row of linearized equation [ ] [ ] [ ] Δ!αt) = F 41 ΔVt) + F 4 Δγ t) + F 43 Δqt) + F 44 Δαt) + G 41 Δδ Et) + G 4 ΔδT t) + G 43 Δδ Ft) + L 41 ΔV wind + L 4 Δα wind 47 Sensitivity of Angle of Attack Dynamics to State Perturbations α = θ γ = q γ Coefficients in fourth row of F F 41 = F 1 F 43 = 1 F 3 F 4 = F F 44 = F
25 Alternative Approach: Numerical Calculation of the Sensitivity Matrices 1 st Differences ) f 1 V t) f 1 V + ΔV ) γ q α f 1 ΔV V ΔV ) γ q α x=x N t ) u=u N t ) w=w N t ) ; f 1 γ t ) f 1 V γ + Δγ ) q α f 1 Δγ V γ Δγ ) q α x=x N t ) u=u N t ) w=w N t ) f V t) f V + ΔV ) γ q α f ΔV V ΔV ) γ q α x=x N t ) u=u N t ) w=w N t ) ; f t γ ) Remaining elements of Ft), Gt), and Lt) calculated accordingly f V γ + Δγ ) q α f Δγ V γ Δγ ) q α x=x N t ) u=u N t ) w=w N t ) 49 Control and Disturbance Sensitivities in Flight Path Angle, Pitch Rate, and Angle-of-Attack Dynamics f δe = 1 $ ρv LδE mv N % S ' ) f δt = 1 $ ρv C TδT sinα N N mv N % S ' ) f δf = 1 $ ρv LδF mv N % S ' ) f 3 δe = 1 $ ρv mδe I yy % Sc ' ) f 3 δt = 1 $ ρv mδt I yy % Sc ' ) f 3 δf = 1 $ ρv mδf I yy % Sc ' ) f 4 δe = f δe f 4 δt = f δt f 4 δf = f δf f = f V wind V f α wind = f α f 3 = f 3 V wind V f 3 α wind = f 3 α f 4 = f V wind V f 3 α wind = f α 50 5
26 Velocity-Dependent Derivative Definitions Air compressibility effects are a principal source of velocity dependence C DM C D M = C D V / a) = a C D V a = Speed of Sound M = Mach number = V a C DM 0 C DM > 0 C DM < 0 C DV C LV C mv C D V = # % 1 $ a ' C D M C L V = # % 1 $ a ' C L M C m V = # % 1 $ a ' C m M 51 Wing Lift and Moment Coefficient Sensitivity to Pitch Rate Straight-wing incompressible flow estimate Etkin) C L ˆqwing = C Lαwing h cm 0.75) C m ˆqwing = C Lαwing h cm 0.5) Straight-wing supersonic flow estimate Etkin) C m ˆqwing C L ˆqwing = C Lαwing h cm 0.5) = 3 M 1 C L αwing h cm 0.5 ) Triangular-wing estimate Bryson, Nielsen) C L ˆqwing = π 3 C L αwing C m ˆqwing = π 3AR 5 6
27 Control- and Disturbance- Effect Matrices Control-effect derivatives portray acceleration sensitivities to control input perturbations # D δ E T δt D δ F % % L δ E / L δt / L δ F / G Lon = % M δ E M δt M % δ F % L δ E / L δt / L δ F / V $ N Disturbance-effect derivatives portray acceleration sensitivities to disturbance input perturbations # D Vwind D αwind % % L Vwind / L αwind / L Lon = % % M Vwind M αwind % L Vwind / L αwind / V $ % N ' ' 53 Primary Longitudinal Stability Derivatives D V 1 # % m C T V C DV $ ) ρ S + C T N C DN )ρ S ' L V 1 " ρv LV m S + C % $ L N ρ S' # 1 " ρv LN mv $ N # S mg % ' M q = 1 " ρv mq I $ yy # Sc % ' M α = 1 # ρv mα I % yy $ Sc ' ) ρv N L α 1 # C TN + C Lα mv % N $ S ' Small angle assumptions 54 7
28 Primary Phugoid Control Derivatives D δt! 1 m C T δt S ρ L δ F! 1 ρv Lδ mv F N S 55 Primary Short-Period Control Derivatives ρ M δ E = mδe Sc L δ E V = C Lδ E I yy ρ N m S 56 8

29 Flight Motions Dornier Do-18D Dornier Do-18 Short-Period Demonstration Dornier Do-18 Phugoid Demonstration
Alternative Expressions for the Velocity Vector Velocity restricted to the vertical plane. Longitudinal Equations of Motion
 Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flig Dynamics MAE 33, 008 Separate solutions for nominal and perturbation flig paths Assume that nominal path is steady and in the vertical
Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flig Dynamics MAE 33, 008 Separate solutions for nominal and perturbation flig paths Assume that nominal path is steady and in the vertical
Linearized Equations of Motion!
 Linearized Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 216 Learning Objectives Develop linear equations to describe small perturbational motions Apply to aircraft dynamic equations
Linearized Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 216 Learning Objectives Develop linear equations to describe small perturbational motions Apply to aircraft dynamic equations
Time Response of Linear, Time-Invariant (LTI) Systems Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018
 Systems Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018") Time Response of Linear, Time-Invariant LTI Systems Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives Methods of time-domain analysis Continuous- and discrete-time models Transient
Time Response of Linear, Time-Invariant LTI Systems Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives Methods of time-domain analysis Continuous- and discrete-time models Transient
Gliding, Climbing, and Turning Flight Performance Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018
 Gliding, Climbing, and Turning Flight Performance Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018 Learning Objectives Conditions for gliding flight Parameters for maximizing climb angle and rate
Gliding, Climbing, and Turning Flight Performance Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018 Learning Objectives Conditions for gliding flight Parameters for maximizing climb angle and rate
A SIMPLIFIED ANALYSIS OF NONLINEAR LONGITUDINAL DYNAMICS AND CONCEPTUAL CONTROL SYSTEM DESIGN
 A SIMPLIFIED ANALYSIS OF NONLINEAR LONGITUDINAL DYNAMICS AND CONCEPTUAL CONTROL SYSTEM DESIGN ROBBIE BUNGE 1. Introduction The longitudinal dynamics of fixed-wing aircraft are a case in which classical
A SIMPLIFIED ANALYSIS OF NONLINEAR LONGITUDINAL DYNAMICS AND CONCEPTUAL CONTROL SYSTEM DESIGN ROBBIE BUNGE 1. Introduction The longitudinal dynamics of fixed-wing aircraft are a case in which classical
FLIGHT DYNAMICS. Robert F. Stengel. Princeton University Press Princeton and Oxford
 FLIGHT DYNAMICS Robert F. Stengel Princeton University Press Princeton and Oxford Preface XV Chapter One Introduction 1 1.1 ELEMENTS OF THE AIRPLANE 1 Airframe Components 1 Propulsion Systems 4 1.2 REPRESENTATIVE
FLIGHT DYNAMICS Robert F. Stengel Princeton University Press Princeton and Oxford Preface XV Chapter One Introduction 1 1.1 ELEMENTS OF THE AIRPLANE 1 Airframe Components 1 Propulsion Systems 4 1.2 REPRESENTATIVE
DESIGN PROJECT REPORT: Longitudinal and lateral-directional stability augmentation of Boeing 747 for cruise flight condition.
 DESIGN PROJECT REPORT: Longitudinal and lateral-directional stability augmentation of Boeing 747 for cruise flight condition. Prepared By: Kushal Shah Advisor: Professor John Hodgkinson Graduate Advisor:
DESIGN PROJECT REPORT: Longitudinal and lateral-directional stability augmentation of Boeing 747 for cruise flight condition. Prepared By: Kushal Shah Advisor: Professor John Hodgkinson Graduate Advisor:
Chapter 8 Dynamic stability analysis II Longitudinal motion (Lectures 28 to 32)
") Chapter 8 Dynamic stability analysis II Longitudinal motion (Lectures 28 to 32) Keywords : Stability quartic or characteristic equation for longitudinal motion and its solution ; roots of characteristic
Chapter 8 Dynamic stability analysis II Longitudinal motion (Lectures 28 to 32) Keywords : Stability quartic or characteristic equation for longitudinal motion and its solution ; roots of characteristic
Flying Qualities Criteria Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018
 Flying Qualities Criteria Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives MIL-F-8785C criteria CAP, C*, and other longitudinal criteria ϕ/β, ω ϕ /ω d, and other lateral-directional
Flying Qualities Criteria Robert Stengel, Aircraft Flight Dynamics MAE 331, 2018 Learning Objectives MIL-F-8785C criteria CAP, C*, and other longitudinal criteria ϕ/β, ω ϕ /ω d, and other lateral-directional
April 15, 2011 Sample Quiz and Exam Questions D. A. Caughey Page 1 of 9
 April 15, 2011 Sample Quiz Exam Questions D. A. Caughey Page 1 of 9 These pages include virtually all Quiz, Midterm, Final Examination questions I have used in M&AE 5070 over the years. Note that some
April 15, 2011 Sample Quiz Exam Questions D. A. Caughey Page 1 of 9 These pages include virtually all Quiz, Midterm, Final Examination questions I have used in M&AE 5070 over the years. Note that some
Mechanics of Flight. Warren F. Phillips. John Wiley & Sons, Inc. Professor Mechanical and Aerospace Engineering Utah State University WILEY
 Mechanics of Flight Warren F. Phillips Professor Mechanical and Aerospace Engineering Utah State University WILEY John Wiley & Sons, Inc. CONTENTS Preface Acknowledgments xi xiii 1. Overview of Aerodynamics
Mechanics of Flight Warren F. Phillips Professor Mechanical and Aerospace Engineering Utah State University WILEY John Wiley & Sons, Inc. CONTENTS Preface Acknowledgments xi xiii 1. Overview of Aerodynamics
CHAPTER 1. Introduction
 CHAPTER 1 Introduction Linear geometric control theory was initiated in the beginning of the 1970 s, see for example, [1, 7]. A good summary of the subject is the book by Wonham [17]. The term geometric
CHAPTER 1 Introduction Linear geometric control theory was initiated in the beginning of the 1970 s, see for example, [1, 7]. A good summary of the subject is the book by Wonham [17]. The term geometric
Applications Linear Control Design Techniques in Aircraft Control I
 Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
Lecture AC-1. Aircraft Dynamics. Copy right 2003 by Jon at h an H ow
 Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Gliding, Climbing, and Turning Flight Performance! Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2016
 Gliding, Climbing, and Turning Flight Performance! Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2016 Learning Objectives Conditions for gliding flight Parameters for maximizing climb angle and rate
Gliding, Climbing, and Turning Flight Performance! Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2016 Learning Objectives Conditions for gliding flight Parameters for maximizing climb angle and rate
Introduction to Flight Dynamics
 Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
AE Stability and Control of Aerospace Vehicles
 AE 430 - Stability and Control of Aerospace Vehicles Aircraft Equations of Motion Dynamic Stability Degree of dynamic stability: time it takes the motion to damp to half or to double the amplitude of its
AE 430 - Stability and Control of Aerospace Vehicles Aircraft Equations of Motion Dynamic Stability Degree of dynamic stability: time it takes the motion to damp to half or to double the amplitude of its
AE Stability and Control of Aerospace Vehicles
 AE 430 - Stability and ontrol of Aerospace Vehicles Static/Dynamic Stability Longitudinal Static Stability Static Stability We begin ith the concept of Equilibrium (Trim). Equilibrium is a state of an
AE 430 - Stability and ontrol of Aerospace Vehicles Static/Dynamic Stability Longitudinal Static Stability Static Stability We begin ith the concept of Equilibrium (Trim). Equilibrium is a state of an
Cruising Flight Envelope Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018
 Cruising Flight Envelope Robert Stengel, Aircraft Flight Dynamics, MAE 331, 018 Learning Objectives Definitions of airspeed Performance parameters Steady cruising flight conditions Breguet range equations
Cruising Flight Envelope Robert Stengel, Aircraft Flight Dynamics, MAE 331, 018 Learning Objectives Definitions of airspeed Performance parameters Steady cruising flight conditions Breguet range equations
Dynamics and Control Preliminary Examination Topics
 Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Equations of Motion for Micro Air Vehicles
 Equations of Motion for Micro Air Vehicles September, 005 Randal W. Beard, Associate Professor Department of Electrical and Computer Engineering Brigham Young University Provo, Utah 84604 USA voice: (80
Equations of Motion for Micro Air Vehicles September, 005 Randal W. Beard, Associate Professor Department of Electrical and Computer Engineering Brigham Young University Provo, Utah 84604 USA voice: (80
Aircraft Flight Dynamics
 Aircraft Flight Dynamics AA241X April 13 2015 Stanford University 1. Equations of motion Full Nonlinear EOM Decoupling of EOM Simplified Models 2. Aerodynamics Dimensionless coefficients Stability Control
Aircraft Flight Dynamics AA241X April 13 2015 Stanford University 1. Equations of motion Full Nonlinear EOM Decoupling of EOM Simplified Models 2. Aerodynamics Dimensionless coefficients Stability Control
Chapter 4 The Equations of Motion
 Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Experimental Aircraft Parameter Estimation
 Experimental Aircraft Parameter Estimation AA241X May 14 2014 Stanford University Overview 1. System & Parameter Identification 2. Energy Performance Estimation Propulsion OFF Propulsion ON 3. Stability
Experimental Aircraft Parameter Estimation AA241X May 14 2014 Stanford University Overview 1. System & Parameter Identification 2. Energy Performance Estimation Propulsion OFF Propulsion ON 3. Stability
Flight Dynamics and Control. Lecture 3: Longitudinal stability Derivatives G. Dimitriadis University of Liege
 Flight Dynamics and Control Lecture 3: Longitudinal stability Derivatives G. Dimitriadis University of Liege Previously on AERO0003-1 We developed linearized equations of motion Longitudinal direction
Flight Dynamics and Control Lecture 3: Longitudinal stability Derivatives G. Dimitriadis University of Liege Previously on AERO0003-1 We developed linearized equations of motion Longitudinal direction
Theoretical and experimental research of supersonic missile ballistics
 BULLETIN OF THE POLISH ACADEMY OF SCIENCES TECHNICAL SCIENCES, Vol. 63, No. 1, 015 DOI: 10.1515/bpasts-015-007 Theoretical and experimental research of supersonic missile ballistics B. ZYGMUNT 1, K. MOTYL
BULLETIN OF THE POLISH ACADEMY OF SCIENCES TECHNICAL SCIENCES, Vol. 63, No. 1, 015 DOI: 10.1515/bpasts-015-007 Theoretical and experimental research of supersonic missile ballistics B. ZYGMUNT 1, K. MOTYL
Performance. 7. Aircraft Performance -Basics
 Performance 7. Aircraft Performance -Basics In general we are interested in finding out certain performance characteristics of a vehicle. These typically include: how fast and how slow an aircraft can
Performance 7. Aircraft Performance -Basics In general we are interested in finding out certain performance characteristics of a vehicle. These typically include: how fast and how slow an aircraft can
Aircraft Flight Dynamics & Vortex Lattice Codes
 Aircraft Flight Dynamics Vortex Lattice Codes AA241X April 14 2014 Stanford University Overview 1. Equations of motion 2. Non-dimensional EOM Aerodynamics 3. Trim Analysis Longitudinal Lateral 4. Linearized
Aircraft Flight Dynamics Vortex Lattice Codes AA241X April 14 2014 Stanford University Overview 1. Equations of motion 2. Non-dimensional EOM Aerodynamics 3. Trim Analysis Longitudinal Lateral 4. Linearized
Fundamentals of Airplane Flight Mechanics
 David G. Hull Fundamentals of Airplane Flight Mechanics With 125 Figures and 25 Tables y Springer Introduction to Airplane Flight Mechanics 1 1.1 Airframe Anatomy 2 1.2 Engine Anatomy 5 1.3 Equations of
David G. Hull Fundamentals of Airplane Flight Mechanics With 125 Figures and 25 Tables y Springer Introduction to Airplane Flight Mechanics 1 1.1 Airframe Anatomy 2 1.2 Engine Anatomy 5 1.3 Equations of
16.333: Lecture # 7. Approximate Longitudinal Dynamics Models
 16.333: Lecture # 7 Approxiate Longitudinal Dynaics Models A couple ore stability derivatives Given ode shapes found identify sipler odels that capture the ain responses Fall 24 16.333 6 1 More Stability
16.333: Lecture # 7 Approxiate Longitudinal Dynaics Models A couple ore stability derivatives Given ode shapes found identify sipler odels that capture the ain responses Fall 24 16.333 6 1 More Stability
Time Response of Dynamic Systems! Multi-Dimensional Trajectories Position, velocity, and acceleration are vectors
 Time Response of Dynamic Systems Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Multi-dimensional trajectories Numerical integration Linear and nonlinear systems Linearization
Time Response of Dynamic Systems Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Multi-dimensional trajectories Numerical integration Linear and nonlinear systems Linearization
Envelopes for Flight Through Stochastic Gusts
 AIAA Atmospheric Flight Mechanics Conference 08-11 August 2011, Portland, Oregon AIAA 2011-6213 Envelopes for Flight Through Stochastic Gusts Johnhenri R. Richardson, Ella M. Atkins, Pierre T. Kabamba,
AIAA Atmospheric Flight Mechanics Conference 08-11 August 2011, Portland, Oregon AIAA 2011-6213 Envelopes for Flight Through Stochastic Gusts Johnhenri R. Richardson, Ella M. Atkins, Pierre T. Kabamba,
Modelling the dynamics of an unmanned aircraft using a graphical simulation tool
 Modelling the dynamics of an unmanned aircraft using a graphical simulation tool Sara Jansson Ahmed Department of Aeronautical and Vehicle Engineering KTH - Royal Institute of Technology SE 100 44 Stockholm,
Modelling the dynamics of an unmanned aircraft using a graphical simulation tool Sara Jansson Ahmed Department of Aeronautical and Vehicle Engineering KTH - Royal Institute of Technology SE 100 44 Stockholm,
Stability and Control
 Stability and Control Introduction An important concept that must be considered when designing an aircraft, missile, or other type of vehicle, is that of stability and control. The study of stability is
Stability and Control Introduction An important concept that must be considered when designing an aircraft, missile, or other type of vehicle, is that of stability and control. The study of stability is
AA 242B/ ME 242B: Mechanical Vibrations (Spring 2016)
") AA 242B/ ME 242B: Mechanical Vibrations (Spring 2016) Homework #2 Due April 17, 2016 This homework focuses on developing a simplified analytical model of the longitudinal dynamics of an aircraft during
AA 242B/ ME 242B: Mechanical Vibrations (Spring 2016) Homework #2 Due April 17, 2016 This homework focuses on developing a simplified analytical model of the longitudinal dynamics of an aircraft during
Consider a wing of finite span with an elliptic circulation distribution:
 Question 1 (a) onsider a wing of finite span with an elliptic circulation distribution: Γ( y) Γo y + b = 1, - s y s where s=b/ denotes the wing semi-span. Use this equation, in conjunction with the Kutta-Joukowsky
Question 1 (a) onsider a wing of finite span with an elliptic circulation distribution: Γ( y) Γo y + b = 1, - s y s where s=b/ denotes the wing semi-span. Use this equation, in conjunction with the Kutta-Joukowsky
Spacecraft and Aircraft Dynamics
 Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 4: Contributions to Longitudinal Stability Aircraft Dynamics Lecture 4 In this lecture, we will discuss Airfoils:
Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 4: Contributions to Longitudinal Stability Aircraft Dynamics Lecture 4 In this lecture, we will discuss Airfoils:
Translational and Rotational Dynamics!
 Translational and Rotational Dynamics Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Copyright 217 by Robert Stengel. All rights reserved. For educational use only.
Translational and Rotational Dynamics Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Copyright 217 by Robert Stengel. All rights reserved. For educational use only.
A New Longitudinal Flight Path Control with Adaptive Wind Shear Estimation and Compensation
 211 th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December 12-1, 211 A New Longitudinal Flight Path Control with Adaptive Wind Shear Estimation
211 th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December 12-1, 211 A New Longitudinal Flight Path Control with Adaptive Wind Shear Estimation
Stability and Control Some Characteristics of Lifting Surfaces, and Pitch-Moments
 Stability and Control Some Characteristics of Lifting Surfaces, and Pitch-Moments The lifting surfaces of a vehicle generally include the wings, the horizontal and vertical tail, and other surfaces such
Stability and Control Some Characteristics of Lifting Surfaces, and Pitch-Moments The lifting surfaces of a vehicle generally include the wings, the horizontal and vertical tail, and other surfaces such
Aircraft Stability and Performance 2nd Year, Aerospace Engineering
 Aircraft Stability and Performance 2nd Year, Aerospace Engineering Dr. M. Turner March 6, 207 Aims of Lecture Part. To examine ways aircraft turn 2. To derive expressions for correctly banked turns 3.
Aircraft Stability and Performance 2nd Year, Aerospace Engineering Dr. M. Turner March 6, 207 Aims of Lecture Part. To examine ways aircraft turn 2. To derive expressions for correctly banked turns 3.
Lecture 11 Overview of Flight Dynamics I. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 11 Overview of Flight Dynamics I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Dr. Radhakant Padhi Asst. Professor
Lecture 11 Overview of Flight Dynamics I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Dr. Radhakant Padhi Asst. Professor
Control Design for a Non-Minimum Phase Hypersonic Vehicle Model
 Control Design for a Non-Minimum Phase Hypersonic Vehicle Model Thomas McKenna A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science University of Washington
Control Design for a Non-Minimum Phase Hypersonic Vehicle Model Thomas McKenna A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science University of Washington
Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010
 Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010 Problem 1: Control of Short Period Dynamics Consider the
Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010 Problem 1: Control of Short Period Dynamics Consider the
Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2018
 Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2018 Course Overview Introduction to Flight Dynamics Math Preliminaries Copyright 2018 by Robert Stengel. All rights reserved. For
Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2018 Course Overview Introduction to Flight Dynamics Math Preliminaries Copyright 2018 by Robert Stengel. All rights reserved. For
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 e are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,8 116, 12M Open access books available International authors and editors Downloads Our authors
e are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,8 116, 12M Open access books available International authors and editors Downloads Our authors
Gust Energy Extraction for Mini- and Micro- Uninhabited Aerial Vehicles
 46 th Aerosciences Conference, Reno, Nevada Gust Energy Extraction for Mini- and Micro- Uninhabited Aerial Vehicles Jack W. Langelaan The Pennsylvania State University, University Park, PA 1682, USA Götz
46 th Aerosciences Conference, Reno, Nevada Gust Energy Extraction for Mini- and Micro- Uninhabited Aerial Vehicles Jack W. Langelaan The Pennsylvania State University, University Park, PA 1682, USA Götz
Giovanni Tarantino, Dipartimento di Fisica e Tecnologie Relative, Università di Palermo (Italia)
") THE INTERACTIVE PHYSICS FLIGHT SIMULATOR Giovanni Tarantino, Dipartimento di Fisica e Tecnologie Relative, Università di Palermo (Italia) Abstract This paper describes a modelling approach to the dynamics
THE INTERACTIVE PHYSICS FLIGHT SIMULATOR Giovanni Tarantino, Dipartimento di Fisica e Tecnologie Relative, Università di Palermo (Italia) Abstract This paper describes a modelling approach to the dynamics
Frequency Domain System Identification for a Small, Low-Cost, Fixed-Wing UAV
 Frequency Domain System Identification for a Small, Low-Cost, Fixed-Wing UAV Andrei Dorobantu, Austin M. Murch, Bernie Mettler, and Gary J. Balas, Department of Aerospace Engineering & Mechanics University
Frequency Domain System Identification for a Small, Low-Cost, Fixed-Wing UAV Andrei Dorobantu, Austin M. Murch, Bernie Mettler, and Gary J. Balas, Department of Aerospace Engineering & Mechanics University
Biologically Inspired Flight Techniques for Small and Micro Unmanned Aerial Vehicles
 Guidance, Navigation and Controls Conference Biologically Inspired Flight Techniques for Small and Micro Unmanned Aerial Vehicles Jack W. Langelaan The Pennsylvania State University, University Park, PA
Guidance, Navigation and Controls Conference Biologically Inspired Flight Techniques for Small and Micro Unmanned Aerial Vehicles Jack W. Langelaan The Pennsylvania State University, University Park, PA
Chapter 5 Performance analysis I Steady level flight (Lectures 17 to 20) Keywords: Steady level flight equations of motion, minimum power required,
 Keywords: Steady level flight equations of motion, minimum power required,") Chapter 5 Performance analysis I Steady level flight (Lectures 17 to 20) Keywords: Steady level flight equations of motion, minimum power required, minimum thrust required, minimum speed, maximum speed;
Chapter 5 Performance analysis I Steady level flight (Lectures 17 to 20) Keywords: Steady level flight equations of motion, minimum power required, minimum thrust required, minimum speed, maximum speed;
Rocket Science 102 : Energy Analysis, Available vs Required
 Rocket Science 102 : Energy Analysis, Available vs Required ΔV Not in Taylor 1 Available Ignoring Aerodynamic Drag. The available Delta V for a Given rocket burn/propellant load is ( ) V = g I ln 1+ P
Rocket Science 102 : Energy Analysis, Available vs Required ΔV Not in Taylor 1 Available Ignoring Aerodynamic Drag. The available Delta V for a Given rocket burn/propellant load is ( ) V = g I ln 1+ P
Aircraft Design I Tail loads
 Horizontal tail loads Aircraft Design I Tail loads What is the source of loads? How to compute it? What cases should be taken under consideration? Tail small wing but strongly deflected Linearized pressure
Horizontal tail loads Aircraft Design I Tail loads What is the source of loads? How to compute it? What cases should be taken under consideration? Tail small wing but strongly deflected Linearized pressure
Aerodynamics SYST 460/560. George Mason University Fall 2008 CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH. Copyright Lance Sherry (2008)
") Aerodynamics SYST 460/560 George Mason University Fall 2008 1 CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH Copyright Lance Sherry (2008) Ambient & Static Pressure Ambient Pressure Static Pressure 2 Ambient
Aerodynamics SYST 460/560 George Mason University Fall 2008 1 CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH Copyright Lance Sherry (2008) Ambient & Static Pressure Ambient Pressure Static Pressure 2 Ambient
Problem Sheet 8 (ans) above
 above") Problem Sheet 8 (ans) 41. A high speed aircraft has a parabolic drag polar with the coefficients varying according to Mach number. This variation is such that the values of the coefficients are constant
Problem Sheet 8 (ans) 41. A high speed aircraft has a parabolic drag polar with the coefficients varying according to Mach number. This variation is such that the values of the coefficients are constant
Feasibility study of a novel method for real-time aerodynamic coefficient estimation
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 11-4-2010 Feasibility study of a novel method for real-time aerodynamic coefficient estimation Phillip Gurbacki
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 11-4-2010 Feasibility study of a novel method for real-time aerodynamic coefficient estimation Phillip Gurbacki
Lecture #AC 3. Aircraft Lateral Dynamics. Spiral, Roll, and Dutch Roll Modes
 Lecture #AC 3 Aircraft Lateral Dynamics Spiral, Roll, and Dutch Roll Modes Copy right 2003 by Jon at h an H ow 1 Spring 2003 16.61 AC 3 2 Aircraft Lateral Dynamics Using a procedure similar to the longitudinal
Lecture #AC 3 Aircraft Lateral Dynamics Spiral, Roll, and Dutch Roll Modes Copy right 2003 by Jon at h an H ow 1 Spring 2003 16.61 AC 3 2 Aircraft Lateral Dynamics Using a procedure similar to the longitudinal
First-Order Low-Pass Filter
 Filters, Cost Functions, and Controller Structures Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 218! Dynamic systems as low-pass filters! Frequency response of dynamic systems!
Filters, Cost Functions, and Controller Structures Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 218! Dynamic systems as low-pass filters! Frequency response of dynamic systems!
Flight and Orbital Mechanics
 Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and orbital mechanics Flight Mechanics practice questions Dr. ir. Mark Voskuijl 20-11-2013 Delft University of Technology Challenge
Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and orbital mechanics Flight Mechanics practice questions Dr. ir. Mark Voskuijl 20-11-2013 Delft University of Technology Challenge
Aircraft Flight Dynamics!
 Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2016 Course Overview Introduction to Flight Dynamics Math Preliminaries Copyright 2016 by Robert Stengel. All rights reserved. For
Aircraft Flight Dynamics Robert Stengel MAE 331, Princeton University, 2016 Course Overview Introduction to Flight Dynamics Math Preliminaries Copyright 2016 by Robert Stengel. All rights reserved. For
Direct spatial motion simulation of aircraft subjected to engine failure
 Direct spatial motion simulation of aircraft subjected to engine failure Yassir ABBAS*,1, Mohammed MADBOULI 2, Gamal EL-BAYOUMI 2 *Corresponding author *,1 Aeronautical Engineering Department, Engineering
Direct spatial motion simulation of aircraft subjected to engine failure Yassir ABBAS*,1, Mohammed MADBOULI 2, Gamal EL-BAYOUMI 2 *Corresponding author *,1 Aeronautical Engineering Department, Engineering
Flight Dynamics, Simulation, and Control
 Flight Dynamics, Simulation, and Control For Rigid and Flexible Aircraft Ranjan Vepa CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an
Flight Dynamics, Simulation, and Control For Rigid and Flexible Aircraft Ranjan Vepa CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an
Example of Aircraft Climb and Maneuvering Performance. Dr. Antonio A. Trani Professor
 Example of Aircraft Climb and Maneuvering Performance CEE 5614 Analysis of Air Transportation Systems Dr. Antonio A. Trani Professor Example - Aircraft Climb Performance Aircraft maneuvering performance
Example of Aircraft Climb and Maneuvering Performance CEE 5614 Analysis of Air Transportation Systems Dr. Antonio A. Trani Professor Example - Aircraft Climb Performance Aircraft maneuvering performance
Dynamic Modeling of Fixed-Wing UAVs
 Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
University of California at Berkeley Department of Mechanical Engineering ME 163 ENGINEERING AERODYNAMICS FINAL EXAM, 13TH DECEMBER 2005
 University of California at Berkeley Department of Mechanical Engineering ME 163 ENGINEERING AERODYNAMICS FINAL EXAM, 13TH DECEMBER 2005 Answer both questions. Question 1 is worth 30 marks and question
University of California at Berkeley Department of Mechanical Engineering ME 163 ENGINEERING AERODYNAMICS FINAL EXAM, 13TH DECEMBER 2005 Answer both questions. Question 1 is worth 30 marks and question
Turn Performance of an Air-Breathing Hypersonic Vehicle
 Turn Performance of an Air-Breathing Hypersonic Vehicle AIAA Aircraft Flight Mechanics Conference Derek J. Dalle, Sean M. Torrez, James F. Driscoll University of Michigan, Ann Arbor, MI 4809 August 8,
Turn Performance of an Air-Breathing Hypersonic Vehicle AIAA Aircraft Flight Mechanics Conference Derek J. Dalle, Sean M. Torrez, James F. Driscoll University of Michigan, Ann Arbor, MI 4809 August 8,
AOE 3104 Problem Sheet 10 (ans)
") AOE 3104 Problem Sheet 10 (ans) Our class business jet has the following characteristics: Gross Weight = 10,000 lbs b = 40 ft C Lmax = 1.8 (normal flight) S = 200 ft 2 C D = 0.02 + 0.05 (C L ) 2 C Lmax
AOE 3104 Problem Sheet 10 (ans) Our class business jet has the following characteristics: Gross Weight = 10,000 lbs b = 40 ft C Lmax = 1.8 (normal flight) S = 200 ft 2 C D = 0.02 + 0.05 (C L ) 2 C Lmax
Nonlinear State Estimation! Extended Kalman Filters!
 Nonlinear State Estimation! Extended Kalman Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Deformation of the probability distribution!! Neighboring-optimal
Nonlinear State Estimation! Extended Kalman Filters! Robert Stengel! Optimal Control and Estimation, MAE 546! Princeton University, 2017!! Deformation of the probability distribution!! Neighboring-optimal
Modeling and Control Strategy for the Transition of a Convertible Tail-sitter UAV
 Modeling and Control Strategy for the Transition of a Convertible Tail-sitter UAV J. Escareño, R.H. Stone, A. Sanchez and R. Lozano Abstract This paper addresses the problem of the transition between rotary-wing
Modeling and Control Strategy for the Transition of a Convertible Tail-sitter UAV J. Escareño, R.H. Stone, A. Sanchez and R. Lozano Abstract This paper addresses the problem of the transition between rotary-wing
Aero-Propulsive-Elastic Modeling Using OpenVSP
 Aero-Propulsive-Elastic Modeling Using OpenVSP August 8, 213 Kevin W. Reynolds Intelligent Systems Division, Code TI NASA Ames Research Center Our Introduction To OpenVSP Overview! Motivation and Background!
Aero-Propulsive-Elastic Modeling Using OpenVSP August 8, 213 Kevin W. Reynolds Intelligent Systems Division, Code TI NASA Ames Research Center Our Introduction To OpenVSP Overview! Motivation and Background!
Aircraft Performance, Stability and control with experiments in Flight. Questions
 Aircraft Performance, Stability and control with experiments in Flight Questions Q. If only the elevator size of a given aircraft is decreased; keeping horizontal tail area unchanged; then the aircraft
Aircraft Performance, Stability and control with experiments in Flight Questions Q. If only the elevator size of a given aircraft is decreased; keeping horizontal tail area unchanged; then the aircraft
Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 10.
 Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 1. D1 Nonlinear Flight-Mechanics Models and their Linearisation D1.1 Introduction
Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 1. D1 Nonlinear Flight-Mechanics Models and their Linearisation D1.1 Introduction
Introduction to Aerospace Engineering
 Introduction to Aerospace Engineering 5. Aircraft Performance 5.1 Equilibrium Flight In order to discuss performance, stability, and control, we must first establish the concept of equilibrium flight.
Introduction to Aerospace Engineering 5. Aircraft Performance 5.1 Equilibrium Flight In order to discuss performance, stability, and control, we must first establish the concept of equilibrium flight.
Probabilistic Control of Nonlinear Uncertain Systems
 Probabilistic Control of Nonlinear Uncertain Systems Qian Wang 1 and Robert F. Stengel 2 1 Mechanical Engineering, Penn State University, University Park, PA 1682, quw6@psu.edu 2 Mechanical and Aerospace
Probabilistic Control of Nonlinear Uncertain Systems Qian Wang 1 and Robert F. Stengel 2 1 Mechanical Engineering, Penn State University, University Park, PA 1682, quw6@psu.edu 2 Mechanical and Aerospace
The Role of Zero Dynamics in Aerospace Systems
 The Role of Zero Dynamics in Aerospace Systems A Case Study in Control of Hypersonic Vehicles Andrea Serrani Department of Electrical and Computer Engineering The Ohio State University Outline q Issues
The Role of Zero Dynamics in Aerospace Systems A Case Study in Control of Hypersonic Vehicles Andrea Serrani Department of Electrical and Computer Engineering The Ohio State University Outline q Issues
Flight and Orbital Mechanics
 Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
ROBUST NONLINEAR CONTROL DESIGN FOR A HYPERSONIC AIRCRAFT USING SUM OF SQUARES METHOD
 Proceedings of the ASME 21 Dynamic Systems and Control Conference DSCC21 September 12-15, 21, Cambridge, Massachusetts, USA DSCC21- ROBUST NONLINEAR CONTROL DESIGN FOR A HYPERSONIC AIRCRAFT USING SUM OF
Proceedings of the ASME 21 Dynamic Systems and Control Conference DSCC21 September 12-15, 21, Cambridge, Massachusetts, USA DSCC21- ROBUST NONLINEAR CONTROL DESIGN FOR A HYPERSONIC AIRCRAFT USING SUM OF
Thin airfoil theory. Chapter Compressible potential flow The full potential equation
 hapter 4 Thin airfoil theory 4. ompressible potential flow 4.. The full potential equation In compressible flow, both the lift and drag of a thin airfoil can be determined to a reasonable level of accuracy
hapter 4 Thin airfoil theory 4. ompressible potential flow 4.. The full potential equation In compressible flow, both the lift and drag of a thin airfoil can be determined to a reasonable level of accuracy
Given a stream function for a cylinder in a uniform flow with circulation: a) Sketch the flow pattern in terms of streamlines.
 Sketch the flow pattern in terms of streamlines.") Question Given a stream function for a cylinder in a uniform flow with circulation: R Γ r ψ = U r sinθ + ln r π R a) Sketch the flow pattern in terms of streamlines. b) Derive an expression for the angular
Question Given a stream function for a cylinder in a uniform flow with circulation: R Γ r ψ = U r sinθ + ln r π R a) Sketch the flow pattern in terms of streamlines. b) Derive an expression for the angular
Stochastic and Adaptive Optimal Control
 Stochastic and Adaptive Optimal Control Robert Stengel Optimal Control and Estimation, MAE 546 Princeton University, 2018! Nonlinear systems with random inputs and perfect measurements! Stochastic neighboring-optimal
Stochastic and Adaptive Optimal Control Robert Stengel Optimal Control and Estimation, MAE 546 Princeton University, 2018! Nonlinear systems with random inputs and perfect measurements! Stochastic neighboring-optimal
Entry Aerodynamics MARYLAND U N I V E R S I T Y O F. Entry Aerodynamics. ENAE Launch and Entry Vehicle Design
 Atmospheric Regimes on Entry Basic fluid parameters Definition of Mean Free Path Rarified gas Newtonian flow Continuum Newtonian flow (hypersonics) 2014 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Atmospheric Regimes on Entry Basic fluid parameters Definition of Mean Free Path Rarified gas Newtonian flow Continuum Newtonian flow (hypersonics) 2014 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Stability and Control Analysis in Twin-Boom Vertical Stabilizer Unmanned Aerial Vehicle (UAV)
") International Journal of Scientific and Research Publications, Volume 4, Issue 2, February 2014 1 Stability and Control Analysis in Twin-Boom Vertical Stabilizer Unmanned Aerial Vehicle UAV Lasantha Kurukularachchi*;
International Journal of Scientific and Research Publications, Volume 4, Issue 2, February 2014 1 Stability and Control Analysis in Twin-Boom Vertical Stabilizer Unmanned Aerial Vehicle UAV Lasantha Kurukularachchi*;
Aerodynamics and Flight Mechanics
 Aerodynamics and Flight Mechanics Principal Investigators: Mike Bragg Eric Loth Graduate Students: Holly Gurbacki (CRI support) Tim Hutchison Devesh Pokhariyal (CRI support) Ryan Oltman 3-1 SMART ICING
Aerodynamics and Flight Mechanics Principal Investigators: Mike Bragg Eric Loth Graduate Students: Holly Gurbacki (CRI support) Tim Hutchison Devesh Pokhariyal (CRI support) Ryan Oltman 3-1 SMART ICING
An Extended Kalman Filter-Based Technique for On-Line Identification of Unmanned Aerial System Parameters
 doi:1528/jatmv7i3412 An Extended Kalman Filter-Based Technique for On-Line Identification of Unmanned Aerial System Parameters Caterina Grillo 1, Fernando Montano 1 ABSTRACT: The present article deals
doi:1528/jatmv7i3412 An Extended Kalman Filter-Based Technique for On-Line Identification of Unmanned Aerial System Parameters Caterina Grillo 1, Fernando Montano 1 ABSTRACT: The present article deals
Minimization with Equality Constraints
 Path Constraints and Numerical Optimization Robert Stengel Optimal Control and Estimation, MAE 546, Princeton University, 2015 State and Control Equality Constraints Pseudoinverse State and Control Inequality
Path Constraints and Numerical Optimization Robert Stengel Optimal Control and Estimation, MAE 546, Princeton University, 2015 State and Control Equality Constraints Pseudoinverse State and Control Inequality
Control System Design. Risk Assessment
 Control System Design Risk Assessment Using Fuzzy Logic VPI - AOE - 239 Dr. Mark R. Anderson Associate Professor Department of Aerospace and Ocean Engineering Virginia Polytechnic Institute and State University
Control System Design Risk Assessment Using Fuzzy Logic VPI - AOE - 239 Dr. Mark R. Anderson Associate Professor Department of Aerospace and Ocean Engineering Virginia Polytechnic Institute and State University
Return Difference Function and Closed-Loop Roots Single-Input/Single-Output Control Systems
 Spectral Properties of Linear- Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2018! Stability margins of single-input/singleoutput (SISO) systems! Characterizations
Spectral Properties of Linear- Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2018! Stability margins of single-input/singleoutput (SISO) systems! Characterizations
Simulation of Non-Linear Flight Control Using Backstepping Method
 Proceedings of the 2 nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7 8, 2015 Paper No. 182 Simulation of Non-Linear Flight Control Using Backstepping
Proceedings of the 2 nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7 8, 2015 Paper No. 182 Simulation of Non-Linear Flight Control Using Backstepping
Adaptive State Estimation Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2018
 Adaptive State Estimation Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 218! Nonlinearity of adaptation! Parameter-adaptive filtering! Test for whiteness of the residual!
Adaptive State Estimation Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 218! Nonlinearity of adaptation! Parameter-adaptive filtering! Test for whiteness of the residual!
Extended longitudinal stability theory at low Re - Application to sailplane models
 Extended longitudinal stability theory at low Re - Application to sailplane models matthieu.scherrer@free.fr November 26 C L C m C m W X α NP W X V NP W Lift coefficient Pitching moment coefficient Pitching
Extended longitudinal stability theory at low Re - Application to sailplane models matthieu.scherrer@free.fr November 26 C L C m C m W X α NP W X V NP W Lift coefficient Pitching moment coefficient Pitching
Time-Invariant Linear Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2015
 Time-Invariant Linear Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 15 Asymptotic approach from time-varying to constant gains Elimination of cross weighting
Time-Invariant Linear Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 15 Asymptotic approach from time-varying to constant gains Elimination of cross weighting
EVOLVING DOCUMENT ME 5070 Flight Dynamics
 EVOLVING DOCUMENT ME 5070 Flight Dynamics Homework Date of this version: March 20, 2015 Hyperlinks look like this Dates in headings below are the dates of the associated lecture Due January 27, 2015 1
EVOLVING DOCUMENT ME 5070 Flight Dynamics Homework Date of this version: March 20, 2015 Hyperlinks look like this Dates in headings below are the dates of the associated lecture Due January 27, 2015 1
Parachute Dynamic Stability and the Effects of Apparent Inertia
 Parachute Dynamic Stability and the Effects of Apparent Inertia AE89 MS Special Problems Report Space Systems Design Lab (SSDL) Guggenheim School of Aerospace Engineering Georgia Institute of Technology
Parachute Dynamic Stability and the Effects of Apparent Inertia AE89 MS Special Problems Report Space Systems Design Lab (SSDL) Guggenheim School of Aerospace Engineering Georgia Institute of Technology
Modeling of a Small Unmanned Aerial Vehicle
 Modeling of a Small Unmanned Aerial Vehicle A. Elsayed Ahmed, A. Hafez, A. N. Ouda, H. Eldin Hussein Ahmed, H. Mohamed Abd-Elkader Abstract Unmanned aircraft systems (UAS) are playing increasingly prominent
Modeling of a Small Unmanned Aerial Vehicle A. Elsayed Ahmed, A. Hafez, A. N. Ouda, H. Eldin Hussein Ahmed, H. Mohamed Abd-Elkader Abstract Unmanned aircraft systems (UAS) are playing increasingly prominent
Robot Control Basics CS 685
 Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
16.333: Lecture # 14. Equations of Motion in a Nonuniform Atmosphere. Gusts and Winds
 16.333: Lecture # 14 Equations of Motion in a Nonuniform Atmosphere Gusts and Winds 1 Fall 2004 16.333 12 2 Equations of Motion Analysis to date has assumed that the atmosphere is calm and fixed Rarely
16.333: Lecture # 14 Equations of Motion in a Nonuniform Atmosphere Gusts and Winds 1 Fall 2004 16.333 12 2 Equations of Motion Analysis to date has assumed that the atmosphere is calm and fixed Rarely
NATIONAL TRANSPORTATION SAFETY BOARD WASHINGTON, D.C.
 DOCKET NO. SA-516 EXHIBIT NO. 22A NATIONAL TRANSPORTATION SAFETY BOARD WASHINGTON, D.C. TRAJECTORY STUDY (16 Pages) NATIONAL TRANSPORTATION SAFETY BOARD Office of Research and Engineering Washington, DC
DOCKET NO. SA-516 EXHIBIT NO. 22A NATIONAL TRANSPORTATION SAFETY BOARD WASHINGTON, D.C. TRAJECTORY STUDY (16 Pages) NATIONAL TRANSPORTATION SAFETY BOARD Office of Research and Engineering Washington, DC
Induced Drag and High-Speed Aerodynamics Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018
 Induced Drag and High-Speed Aerodynamics Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018 Drag-due-to-lift and effects of wing planform Effect of angle of attack on lift and drag coefficients Mach
Induced Drag and High-Speed Aerodynamics Robert Stengel, Aircraft Flight Dynamics, MAE 331, 2018 Drag-due-to-lift and effects of wing planform Effect of angle of attack on lift and drag coefficients Mach
MATHEMATICAL MODELS FOR CONTROL OF AIRCRAFT AND SATELLITES THOR I. FOSSEN
 MATHEMATICAL MODELS FOR CONTROL OF AIRCRAFT AND SATELLITES THOR I. FOSSEN Professor of Guidance, Navigation and Control D E C N U S T June 216 4th edition Copyright c 1998-213 Department of Engineering
MATHEMATICAL MODELS FOR CONTROL OF AIRCRAFT AND SATELLITES THOR I. FOSSEN Professor of Guidance, Navigation and Control D E C N U S T June 216 4th edition Copyright c 1998-213 Department of Engineering
Aerodynamics and Flight Mechanics
 Aerodynamics and Flight Mechanics Principal Investigator: Mike Bragg Eric Loth Post Doc s: Graduate Students: Undergraduate Students: Sam Lee Jason Merret Kishwar Hossain Edward Whalen Chris Lamarre Leia
Aerodynamics and Flight Mechanics Principal Investigator: Mike Bragg Eric Loth Post Doc s: Graduate Students: Undergraduate Students: Sam Lee Jason Merret Kishwar Hossain Edward Whalen Chris Lamarre Leia