Flight Dynamics and Control
|
|
|
- Noreen Gibson
- 6 years ago
- Views:
Transcription
1 Flight Dynamics and Control Lecture 1: Introduction G. Dimitriadis University of Liege
2 Reference material Lecture Notes Flight Dynamics Principles, M.V. Cook, Arnold, 1997 Fundamentals of Airplane Flight Mechanics, David G. Hull, Berlin, Heidelberg : Springer-Verlag Berlin Heidelberg, 2007,

3 What is it about?
4 Introduction The study of the mechanics and dynamics of flight is the means by which : We can design an airplane to accomplish efficiently a specific task We can make the task of the pilot easier by ensuring good handling qualities We can avoid unwanted or unexpected phenomena that can be encountered in flight
5 Aircraft description Pilot Flight Control Airplane Response Task System The pilot has direct control only of the Flight Control System. However, he can tailor his inputs to the FCS by observing the airplane s response while always keeping an eye on the task at hand.
6 Control Surfaces Aircraft control is accomplished through control surfaces and power Ailerons Elevators Rudder Throttle Control deflections were first developed by the Wright brothers from watching birds

7 Wright Flyer The Flyer did not have separate control surfaces. The trailing edges of the windtips could be bent by a system of cables




8 Modern control surfaces Rudder Elevator Aileron Rudderon (rudder+aileron ) Elevon (elevator+aileron)

")
9 Other devices Flaps Airbreak Spoilers Combinations of control surfaces and other devices: flaperons, spoilerons, decelerons (aileron and airbrake) Vectored thrust
10 Mathematical Model Flight Condition Input Aileron Elevator Rudder Throttle Aircraft equations of motion Output Displacement Velocity Acceleration Atmospheric Condition

11 Aircraft degrees of freedom Six degrees of freedom: 3 displacements x: horizontal motion y y: side motion z: vertical motion 3 rotations Around x: roll x U cg w Around y: pitch z Around z: yaw U: resultant linear velocity, cg: centre of gravity w: resultant angular velocity
12 Aircraft frames of reference There are many possible coordinate systems: Inertial (immobile and far away) Earth-fixed (rotates with the earth s surface) Vehicle carried vertical frame (fixed on aircraft cg, vertical axis parallel to gravity) Air-trajectory (fixed on aircraft cg, parallel to the direction of motion of the aircraft) Body-fixed (fixed on aircraft cg, parallel to a geometric datum line on the aircraft) Stability axes (fixed on aircraft cg, parallel to a reference flight condition) Others
13 Airplane geometry c s = b /2 c(y) x( y) c /4 cg c /4 y l T l t c x MAC
14 Airplane references (1) Standard mean chord (SMC) Mean aerodynamic chord (MAC) s s s s c = c 2 ( y) dy / c( y) dy x MAC = c( y) x( y) s c = Wing area s Aspect Ratio s ( ) c y dy / dy s S = bc AR = b 2 /S s s dy / c y s s ( ) dy
15 Airplane references (2) Centre of gravity (cg) Tailplane area (S T ) Tail moment arm (l T ) Tail volume ratio: A measure of the aerodynamic effectiveness of the tailplane V T = S T l T Sc
16 Airplane references (3) c /4 cg c /4 l F lf Fin moment arm (l F ) Fin volume ratio V F = S F l F Sc
17 Aerodynamic Reference Centres Centre of pressure (cp): The point at which the resultant aerodynamic force F acts. There is no aerodynamic moment around the cp. Half-chord: The point at which the aerodynamic force due to camber, F c, acts Quarter-chord (or aerodynamic centre): The point at which the aerodynamic force due to angle of attack, F a, acts. The aerodynamic moment around the quarter-chord, M 0, is constant with angle of attack
18 Airfoil with centres By placing all of the lift and drag on the aerodynamic centre we move the lift and drag due to camber from the halfchord to the quarter chord. This is balanced by the moment M 0 F c F cp D c /2 h n c D c L c L L a c F a D a ac L D c /4 M 0 Camber line V 0
19 Full description of aircraft movement The static stability analysis presented in the aircraft design lectures is good for the preliminary design of aircraft Aircraft flight is a dynamic phenomenon: Every control input or external excitation results in a dynamic response The dynamic response may be oscillatory and have a single or several frequency components The dynamic response may be damped (stable) or undamped (unstable) The modelling of this dynamic response necessitates the derivation of the full equations of motion of the aircraft
20 Nomenclature Here is a definition of the degrees of freedom of an aircraft and the forces and moments acting on it. All degrees of freedom are relative to the aircraft s centre of gravity and use aircraft geometrical axes. Symbols Definition x, U, X translation, velocity and force applied in the direction parallel to the axis of the fuselage y, V, Y translation, velocity and force applied in the direction perpendicular to the plane of symmetry of the aircraft z, W, Z translation, velocity and force applied in the direction perpendicular to both x and y p, L angular velocity and moment in roll direction q, M angular velocity and moment in pitch direction r, N angular velocity and moment in yaw direction
21 Body and axes Axis system Could be any body but in this case it is an aircraft of mass m. For the moment it is a flexible body Any point p on the body can have a velocity and acceleration with respect to the c.g.
22 Vector notation We define the following vector notation Noting that u and a are velocities and accelerations with respect to the center of gravity x = x y z! ", w = p q r! ", U = U V W! ", F = X Y Z! ", M = L M N! " u = u v w! ", a = a x a y a z! "
23 Developing the equations of motion All equations of motion of dynamic systems can be derived using Newton s Second Law. Two sets of equations are derived: Sum of forces acting on the system (internal and external) are equal to its mass times its acceleration Sum of moments acting on the system (internal and external) are equal to its moment of inertia times its angular acceleration Therefore, the object of the derivation is to estimate the accelerations (linear and angular of the aircraft) As usual, the same equations of motion can be obtained using Lagrange s equation (i.e. conservation of energy)
24 Local velocities (1) The local velocity vector u is given simply by Substituting for the vector definitions Where x denotes the vector (cross) product and u =!x + w x u =!x!y!z! " + p q r! " x y z! " p q r! " x y z! " = i j k p q r x y z
25 Local velocities (2) The equations for the local velocities at point p(x,y,z) are u = v = x ry + qz y pz + rx w = z qx + py Now assume that the body is rigid, i.e. no parts of it are moving with respect to the c.g
26 Total local velocities This gives x = y = z = 0 therefore u = ry + qz u = w x, or, v = pz + rx w = qx + py (1) The total local velocities u =u+u at p(x,y,z) are given by u = U + u = U ry + qz v = V + v = V pz + rx w = W + w = W qx + py
27 Local accelerations (1) Similarly, the local accelerations at point p(x,y,z) are given by Substituting for the vector definitions where a =!u + w u a =!u!v!w! " + p q r! " u v w! " =!ry +!qz!pz +!rx!qx +!py! " + p q r! " u v w! " p q r! " u v w! " = i j k p q r ry + qz pz + rx qx + py (2)
28 Local accelerations (2) Carrying out all the algebra leads to a x = x( q 2 + r 2 ) + y( pq!r ) + z( pr +!q ) a y = x( pq +!r ) y( p 2 + r 2 ) + z( qr!p ) a z = x( pr!q ) + y( qr +!p ) z( p 2 + q 2 ) Remembering that this is only part of the acceleration of point p. The acceleration of the centre of gravity must be added.
29 Total local acceleration The total local acceleration at point p(x,y,z) is defined as So that, finally! a =! U + w U + a (3) a! x = U! rv + qw x( q 2 + r 2 ) + y( pq!r ) + z( pr +!q ) a! y = V! pw + ru + x( pq +!r ) y( p 2 + r 2 ) + z( qr!p ) (4) a! z = W! qu + pv + x( pr!q ) + y( qr +!p ) z( p 2 + q 2 )
30 Example A pilot in an aerobatic aircraft performs a loop in 20s at a steady velocity of 100m/s. His seat is located 5m ahead of, and 1m above, the c.g. What total normal load factor does he experience at the top and the bottom of the loop?
31 Solution Movement only in the plane of symmetry: V = p = p = r = 0 Normal acceleration: a z = W qu + x q zq 2 cg 100m/s For a steady manoeuvre: 2R W = q = 0 Pitch rate: q = 2π 20 = 0.314rad/s 100m/s 1m 5m cg
32 Solution (2) Substituting into equation for normal acceleration at the seat: a z = qu zq 2 = ( 1) = 31.3m/s 2 Normal load factor definition: a z n = g = = 3.19 Total normal load factor at top of loop: n = n 1= 2.19 Total normal load factor at bottom of loop: n = n +1= 4.19
33 Generalized Force Equations Assume that point p(x,y,z) has a small mass dm. Applying Newton s 2 nd law to the entire body yields a! dm = F (5) where the subscript denotes that the integral is taken over the entire volume
34 Force equations (2) Remember from equation (3) that! a =! U + w U + a Substituting from equations (2) and (1)! a =! U + w U +!w x + w w x ( ) Putting this last result back into Newton s 2 nd Law, equation (5) (!U + w U +!w x + w ( w x) )dm = F (6)
35 Centre of gravity As far as the integral over the volume is concerned, w and U are constants The generalized force equation becomes!u dm + w U dm +!w xdm + w w xdm( = F ' The definition of the centre of gravity is xdm = 0 The force equation becomes m ( U! + w U) = F (7)
36 Generalized Moment Equations The angular acceleration of point p(x,y,z) around the centre of gravity is given by x a" Again, use Newton s second law, this time in moment form, to obtain x a" dm = M (8) Substitute from equation (6) x ( U! + w U +!w x + w ( w x) )dm = M
37 Center of gravity Using the definition of the centre of gravity, the moment equation becomes x (!w x)dm + x w ( w x) dm = M Now remember the matrix form of the cross product x w = Xw w x = X T w, where X = 0 z y z 0 x y x 0 ( ( ( '
38 Moments of inertia The first term in the moment equation becomes x (!w x)dm = XX T!w dm = XX T dm(!w ' where I c = XX T dm = y 2 + z 2 xy xz xy x 2 + z 2 yz xz yz x 2 + y 2 is the system s inertia matrix ( ( dm ( ' (
39 Moments of inertia (2) The individual moments and products of inertia are defined as I x = ( y 2 + z 2 )dm, I y = ( x 2 + z 2 )dm, I z = ( x 2 + y 2 )dm I xy = xydm, I xz = xzdm, I yz = yzdm So that the inertia matrix becomes " I c = I x I xy I xz I xy I y I yz I xz I yz I z ' ' ' ' (8)
40 Moment equation Using the definition of the inertia matrix, the first term in the moment equation becomes simply x (!w x)dm = I c!w Similarly, the second term is x w ( w x) dm = w ( I c w) The full moment equation becomes I c!w + w ( I c w) = M (9)
41 Complete equations of motion Assembling equations (7) and (9) we get the complete equations of motion m ( U! + w U) = F (10) I c!w + w ( I c w) = M This is a set of 6 equations of motion with 6 unknowns, U, V, W, p, q, r. They are nonlinear Ordinary Differential Equations.
42 Scalar form Substituting for the definitions of I c, U, w, F and M we get a nicer form m (!U rv + qw ) = X m (!V pw + ru) = Y m! W qu + pv ( ) = Z I x!p ( I y I z )qr + I xy ( pr!q ) I xz ( pq +!r ) + I ( yz r 2 q 2 ) = L I y!q + ( I x I z ) pr + I yz ( pq!r ) + I ( xz p 2 r 2 ) I xy ( qr +!p ) = M I z!r ( I x I ) y pq I yz ( pr +!q ) + I xz ( qr!p ) + I ( xy q 2 + p 2 ) = N (11)
43 Symmetric aircraft Consider an aircraft that is symmetric about the x-z plane. For ever point p(x,y,z) with mass dm, there is a point p(x, -y,z) with mass dm. It follows that Similarly, I xy = I yz = xydm = 0 yzdm = 0
44 y p(x,y,z) O p(x,-y,z) x z The elementary mass moment xydm around the CG is cancelled by the elementary mass moment x(-y)dm.

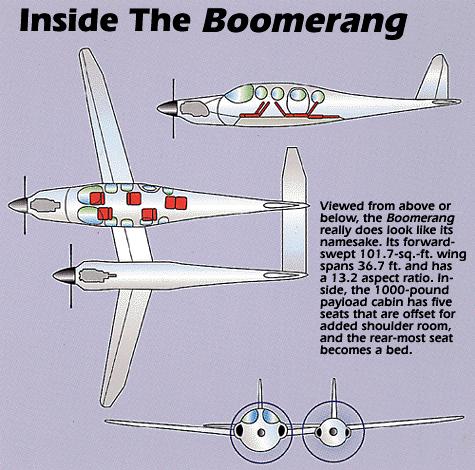
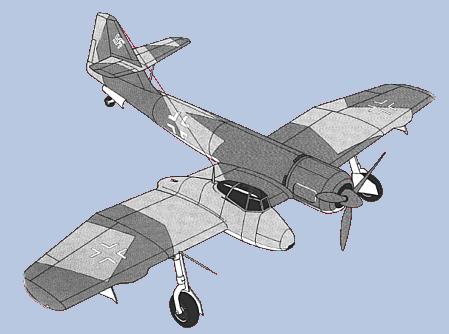
45 Asymmetric Aircraft Blohm und Voss 141 Blohm und Voss 237 Ruttan Bumerang
46 Symmetric aircraft (2) For symmetric aircraft, the equations of motion become m ( U! rv + qw ) = X m (!V pw + ru) = Y m!w qu + pv ( ) = Z I x!p ( I y I z )qr I xz ( pq +!r ) = L I y!q + ( I x I z ) pr + I ( xz p 2 r 2 ) = M I z!r ( I x I ) y pq + I xz ( qr!p ) = N (12)
47 Discussion of the equations If we can solve for U, V, W, p, q, r as functions of time, then we know the complete time history of the motion of the aircraft. Unfortunately, terms such as ru, pv, qw, etc and pq, r 2, qr etc are nonlinear. Furthermore, we have only defined the inertial loads up to now. We have not said anything about the external loads acting on the aircraft.
48 External Forces and Moments There are five sources of external forces and moments: Aerodynamic Gravitational Controls Propulsion Atmospheric Disturbances
49 External Forces and moments The full equations of motion in the presence of external forces and moments are m( U rv + qw ) = X a + X g + X c + X p + X d m( V pw + ru) = Y a + Y g + Y c + Y p + Y d m( W qu + pv ) = Z a + Z g + Z c + Z p + Z d I x p ( I y I z )qr I xz pq + r I y q + ( ) = L a + L g + L c + L p + L d ( I x I z )pr + I ( xz p 2 r 2 ) = M a + M g + M c + M p + M d I z r ( I x I y )pq + I xz qr p ( ) = N a + N g + N c + N p + N d
Chapter 4 The Equations of Motion
 Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Chapter 4 The Equations of Motion Flight Mechanics and Control AEM 4303 Bérénice Mettler University of Minnesota Feb. 20-27, 2013 (v. 2/26/13) Bérénice Mettler (University of Minnesota) Chapter 4 The Equations
Flight Dynamics and Control. Lecture 3: Longitudinal stability Derivatives G. Dimitriadis University of Liege
 Flight Dynamics and Control Lecture 3: Longitudinal stability Derivatives G. Dimitriadis University of Liege Previously on AERO0003-1 We developed linearized equations of motion Longitudinal direction
Flight Dynamics and Control Lecture 3: Longitudinal stability Derivatives G. Dimitriadis University of Liege Previously on AERO0003-1 We developed linearized equations of motion Longitudinal direction
Fundamentals of Airplane Flight Mechanics
 David G. Hull Fundamentals of Airplane Flight Mechanics With 125 Figures and 25 Tables y Springer Introduction to Airplane Flight Mechanics 1 1.1 Airframe Anatomy 2 1.2 Engine Anatomy 5 1.3 Equations of
David G. Hull Fundamentals of Airplane Flight Mechanics With 125 Figures and 25 Tables y Springer Introduction to Airplane Flight Mechanics 1 1.1 Airframe Anatomy 2 1.2 Engine Anatomy 5 1.3 Equations of
Mechanics of Flight. Warren F. Phillips. John Wiley & Sons, Inc. Professor Mechanical and Aerospace Engineering Utah State University WILEY
 Mechanics of Flight Warren F. Phillips Professor Mechanical and Aerospace Engineering Utah State University WILEY John Wiley & Sons, Inc. CONTENTS Preface Acknowledgments xi xiii 1. Overview of Aerodynamics
Mechanics of Flight Warren F. Phillips Professor Mechanical and Aerospace Engineering Utah State University WILEY John Wiley & Sons, Inc. CONTENTS Preface Acknowledgments xi xiii 1. Overview of Aerodynamics
Lecture AC-1. Aircraft Dynamics. Copy right 2003 by Jon at h an H ow
 Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Introduction to Flight Dynamics
 Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
Chapter 1 Introduction to Flight Dynamics Flight dynamics deals principally with the response of aerospace vehicles to perturbations in their flight environments and to control inputs. In order to understand
Chapter 1 Lecture 2. Introduction 2. Topics. Chapter-1
 Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
April 15, 2011 Sample Quiz and Exam Questions D. A. Caughey Page 1 of 9
 April 15, 2011 Sample Quiz Exam Questions D. A. Caughey Page 1 of 9 These pages include virtually all Quiz, Midterm, Final Examination questions I have used in M&AE 5070 over the years. Note that some
April 15, 2011 Sample Quiz Exam Questions D. A. Caughey Page 1 of 9 These pages include virtually all Quiz, Midterm, Final Examination questions I have used in M&AE 5070 over the years. Note that some
AE Stability and Control of Aerospace Vehicles
 AE 430 - Stability and ontrol of Aerospace Vehicles Static/Dynamic Stability Longitudinal Static Stability Static Stability We begin ith the concept of Equilibrium (Trim). Equilibrium is a state of an
AE 430 - Stability and ontrol of Aerospace Vehicles Static/Dynamic Stability Longitudinal Static Stability Static Stability We begin ith the concept of Equilibrium (Trim). Equilibrium is a state of an
FLIGHT DYNAMICS. Robert F. Stengel. Princeton University Press Princeton and Oxford
 FLIGHT DYNAMICS Robert F. Stengel Princeton University Press Princeton and Oxford Preface XV Chapter One Introduction 1 1.1 ELEMENTS OF THE AIRPLANE 1 Airframe Components 1 Propulsion Systems 4 1.2 REPRESENTATIVE
FLIGHT DYNAMICS Robert F. Stengel Princeton University Press Princeton and Oxford Preface XV Chapter One Introduction 1 1.1 ELEMENTS OF THE AIRPLANE 1 Airframe Components 1 Propulsion Systems 4 1.2 REPRESENTATIVE
Flight Vehicle Terminology
 Flight Vehicle Terminology 1.0 Axes Systems There are 3 axes systems which can be used in Aeronautics, Aerodynamics & Flight Mechanics: Ground Axes G(x 0, y 0, z 0 ) Body Axes G(x, y, z) Aerodynamic Axes
Flight Vehicle Terminology 1.0 Axes Systems There are 3 axes systems which can be used in Aeronautics, Aerodynamics & Flight Mechanics: Ground Axes G(x 0, y 0, z 0 ) Body Axes G(x, y, z) Aerodynamic Axes
Lecture 11 Overview of Flight Dynamics I. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 11 Overview of Flight Dynamics I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Dr. Radhakant Padhi Asst. Professor
Lecture 11 Overview of Flight Dynamics I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Dr. Radhakant Padhi Asst. Professor
Stability and Control
 Stability and Control Introduction An important concept that must be considered when designing an aircraft, missile, or other type of vehicle, is that of stability and control. The study of stability is
Stability and Control Introduction An important concept that must be considered when designing an aircraft, missile, or other type of vehicle, is that of stability and control. The study of stability is
Aircraft Structures Design Example
 University of Liège Aerospace & Mechanical Engineering Aircraft Structures Design Example Ludovic Noels Computational & Multiscale Mechanics of Materials CM3 http://www.ltas-cm3.ulg.ac.be/ Chemin des Chevreuils
University of Liège Aerospace & Mechanical Engineering Aircraft Structures Design Example Ludovic Noels Computational & Multiscale Mechanics of Materials CM3 http://www.ltas-cm3.ulg.ac.be/ Chemin des Chevreuils
AB-267 DYNAMICS & CONTROL OF FLEXIBLE AIRCRAFT
 FLÁIO SILESTRE DYNAMICS & CONTROL OF FLEXIBLE AIRCRAFT LECTURE NOTES LAGRANGIAN MECHANICS APPLIED TO RIGID-BODY DYNAMICS IMAGE CREDITS: BOEING FLÁIO SILESTRE Introduction Lagrangian Mechanics shall be
FLÁIO SILESTRE DYNAMICS & CONTROL OF FLEXIBLE AIRCRAFT LECTURE NOTES LAGRANGIAN MECHANICS APPLIED TO RIGID-BODY DYNAMICS IMAGE CREDITS: BOEING FLÁIO SILESTRE Introduction Lagrangian Mechanics shall be
Introduction to Atmospheric Flight. Dr. Guven Aerospace Engineer (P.hD)
") Introduction to Atmospheric Flight Dr. Guven Aerospace Engineer (P.hD) What is Atmospheric Flight? There are many different ways in which Aerospace engineering is associated with atmospheric flight concepts.
Introduction to Atmospheric Flight Dr. Guven Aerospace Engineer (P.hD) What is Atmospheric Flight? There are many different ways in which Aerospace engineering is associated with atmospheric flight concepts.
Dynamics and Control of Rotorcraft
 Dynamics and Control of Rotorcraft Helicopter Aerodynamics and Dynamics Abhishek Department of Aerospace Engineering Indian Institute of Technology, Kanpur February 3, 2018 Overview Flight Dynamics Model
Dynamics and Control of Rotorcraft Helicopter Aerodynamics and Dynamics Abhishek Department of Aerospace Engineering Indian Institute of Technology, Kanpur February 3, 2018 Overview Flight Dynamics Model
Aircraft Flight Dynamics & Vortex Lattice Codes
 Aircraft Flight Dynamics Vortex Lattice Codes AA241X April 14 2014 Stanford University Overview 1. Equations of motion 2. Non-dimensional EOM Aerodynamics 3. Trim Analysis Longitudinal Lateral 4. Linearized
Aircraft Flight Dynamics Vortex Lattice Codes AA241X April 14 2014 Stanford University Overview 1. Equations of motion 2. Non-dimensional EOM Aerodynamics 3. Trim Analysis Longitudinal Lateral 4. Linearized
Linearized Equations of Motion!
 Linearized Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 216 Learning Objectives Develop linear equations to describe small perturbational motions Apply to aircraft dynamic equations
Linearized Equations of Motion Robert Stengel, Aircraft Flight Dynamics MAE 331, 216 Learning Objectives Develop linear equations to describe small perturbational motions Apply to aircraft dynamic equations
What is flight dynamics? AE540: Flight Dynamics and Control I. What is flight control? Is the study of aircraft motion and its characteristics.
 KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
AA 242B/ ME 242B: Mechanical Vibrations (Spring 2016)
") AA 242B/ ME 242B: Mechanical Vibrations (Spring 2016) Homework #2 Due April 17, 2016 This homework focuses on developing a simplified analytical model of the longitudinal dynamics of an aircraft during
AA 242B/ ME 242B: Mechanical Vibrations (Spring 2016) Homework #2 Due April 17, 2016 This homework focuses on developing a simplified analytical model of the longitudinal dynamics of an aircraft during
Aircraft Design I Tail loads
 Horizontal tail loads Aircraft Design I Tail loads What is the source of loads? How to compute it? What cases should be taken under consideration? Tail small wing but strongly deflected Linearized pressure
Horizontal tail loads Aircraft Design I Tail loads What is the source of loads? How to compute it? What cases should be taken under consideration? Tail small wing but strongly deflected Linearized pressure
Flight Dynamics, Simulation, and Control
 Flight Dynamics, Simulation, and Control For Rigid and Flexible Aircraft Ranjan Vepa CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an
Flight Dynamics, Simulation, and Control For Rigid and Flexible Aircraft Ranjan Vepa CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an
/ m U) β - r dr/dt=(n β / C) β+ (N r /C) r [8+8] (c) Effective angle of attack. [4+6+6]
![/ m U) β - r dr/dt=(n β / C) β+ (N r /C) r [8+8] (c) Effective angle of attack. [4+6+6]](/thumbs/91/105418625.jpg "/ m U) β - r dr/dt=(n β / C) β+ (N r /C) r [8+8] (c) Effective angle of attack. [4+6+6]") Code No: R05322101 Set No. 1 1. (a) Explain the following terms with examples i. Stability ii. Equilibrium. (b) Comment upon the requirements of stability of a i. Military fighter aircraft ii. Commercial
Code No: R05322101 Set No. 1 1. (a) Explain the following terms with examples i. Stability ii. Equilibrium. (b) Comment upon the requirements of stability of a i. Military fighter aircraft ii. Commercial
Alternative Expressions for the Velocity Vector Velocity restricted to the vertical plane. Longitudinal Equations of Motion
 Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flig Dynamics MAE 33, 008 Separate solutions for nominal and perturbation flig paths Assume that nominal path is steady and in the vertical
Linearized Longitudinal Equations of Motion Robert Stengel, Aircraft Flig Dynamics MAE 33, 008 Separate solutions for nominal and perturbation flig paths Assume that nominal path is steady and in the vertical
Translational and Rotational Dynamics!
 Translational and Rotational Dynamics Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Copyright 217 by Robert Stengel. All rights reserved. For educational use only.
Translational and Rotational Dynamics Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Copyright 217 by Robert Stengel. All rights reserved. For educational use only.
Robot Dynamics Fixed-wing UAVs: Dynamic Modeling and Control
 Robot Dynamics Fixed-wing UAVs: Dynamic Modeling and Control 151-0851-00 V Marco Hutter, Roland Siegwart, and Thomas Stastny 05.12.2017 1 Contents Fixed-wing UAVs 1. ntroduction 2. Aerodynamic Basics 3.
Robot Dynamics Fixed-wing UAVs: Dynamic Modeling and Control 151-0851-00 V Marco Hutter, Roland Siegwart, and Thomas Stastny 05.12.2017 1 Contents Fixed-wing UAVs 1. ntroduction 2. Aerodynamic Basics 3.
Chapter 5 Performance analysis I Steady level flight (Lectures 17 to 20) Keywords: Steady level flight equations of motion, minimum power required,
 Keywords: Steady level flight equations of motion, minimum power required,") Chapter 5 Performance analysis I Steady level flight (Lectures 17 to 20) Keywords: Steady level flight equations of motion, minimum power required, minimum thrust required, minimum speed, maximum speed;
Chapter 5 Performance analysis I Steady level flight (Lectures 17 to 20) Keywords: Steady level flight equations of motion, minimum power required, minimum thrust required, minimum speed, maximum speed;
Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft
 Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft Naoharu Yoshitani 1, Shin-ichi Hashimoto 2, Takehiro Kimura 3, Kazuki Motohashi 2 and Shoh Ueno 4 1 Dept. of Aerospace Engineering, Teikyo
Flight Control Simulators for Unmanned Fixed-Wing and VTOL Aircraft Naoharu Yoshitani 1, Shin-ichi Hashimoto 2, Takehiro Kimura 3, Kazuki Motohashi 2 and Shoh Ueno 4 1 Dept. of Aerospace Engineering, Teikyo
Investigating the Performance of Adaptive Methods in application to Autopilot of General aviation Aircraft
 I J C T A, 8(5), 2015, pp 2423-2431 International Science Press Investigating the Performance of Adaptive Methods in application to Autopilot of General aviation Aircraft V Rajesari 1 and L Padma Suresh
I J C T A, 8(5), 2015, pp 2423-2431 International Science Press Investigating the Performance of Adaptive Methods in application to Autopilot of General aviation Aircraft V Rajesari 1 and L Padma Suresh
Contribution of Airplane design parameters on Roll Coupling اي داءالبارامترات التصميميه للطائره على ازدواج الحركي
 International Journal of Mechanical & Mechatronics Engineering IJMME-IJENS Vol:13 No:06 7 Contribution of Airplane design parameters on Roll Coupling اي داءالبارامترات التصميميه للطائره على ازدواج الحركي
International Journal of Mechanical & Mechatronics Engineering IJMME-IJENS Vol:13 No:06 7 Contribution of Airplane design parameters on Roll Coupling اي داءالبارامترات التصميميه للطائره على ازدواج الحركي
Pitch Control of Flight System using Dynamic Inversion and PID Controller
 Pitch Control of Flight System using Dynamic Inversion and PID Controller Jisha Shaji Dept. of Electrical &Electronics Engineering Mar Baselios College of Engineering & Technology Thiruvananthapuram, India
Pitch Control of Flight System using Dynamic Inversion and PID Controller Jisha Shaji Dept. of Electrical &Electronics Engineering Mar Baselios College of Engineering & Technology Thiruvananthapuram, India
Optimal Control, Guidance and Estimation. Lecture 16. Overview of Flight Dynamics II. Prof. Radhakant Padhi. Prof. Radhakant Padhi
 Optimal Control, Guidance and Estimation Lecture 16 Overview of Flight Dynamics II Prof. Radhakant Padhi Dept. of erospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Prof.
Optimal Control, Guidance and Estimation Lecture 16 Overview of Flight Dynamics II Prof. Radhakant Padhi Dept. of erospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Prof.
AEROSPACE ENGINEERING
 AEROSPACE ENGINEERING Subject Code: AE Course Structure Sections/Units Topics Section A Engineering Mathematics Topics (Core) 1 Linear Algebra 2 Calculus 3 Differential Equations 1 Fourier Series Topics
AEROSPACE ENGINEERING Subject Code: AE Course Structure Sections/Units Topics Section A Engineering Mathematics Topics (Core) 1 Linear Algebra 2 Calculus 3 Differential Equations 1 Fourier Series Topics
CHAPTER 1. Introduction
 CHAPTER 1 Introduction Linear geometric control theory was initiated in the beginning of the 1970 s, see for example, [1, 7]. A good summary of the subject is the book by Wonham [17]. The term geometric
CHAPTER 1 Introduction Linear geometric control theory was initiated in the beginning of the 1970 s, see for example, [1, 7]. A good summary of the subject is the book by Wonham [17]. The term geometric
Rotor reference axis
 Rotor reference axis So far we have used the same reference axis: Z aligned with the rotor shaft Y perpendicular to Z and along the blade (in the rotor plane). X in the rotor plane and perpendicular do
Rotor reference axis So far we have used the same reference axis: Z aligned with the rotor shaft Y perpendicular to Z and along the blade (in the rotor plane). X in the rotor plane and perpendicular do
u (surge) X o p (roll) Body-fixed r o v (sway) w (heave) Z o Earth-fixed X Y Z r (yaw) (pitch)
 X o p (roll) Body-fixed r o v (sway) w (heave) Z o Earth-fixed X Y Z r (yaw) (pitch)") Nonlinear Modelling of Marine Vehicles in Degrees of Freedom Thor I. Fossen and Ola-Erik Fjellstad The Norwegian Institute of Technology Department of Engineering Cybernetics N-0 Trondheim, NORWAY (E-mail:tif@itk.unit.no)
Nonlinear Modelling of Marine Vehicles in Degrees of Freedom Thor I. Fossen and Ola-Erik Fjellstad The Norwegian Institute of Technology Department of Engineering Cybernetics N-0 Trondheim, NORWAY (E-mail:tif@itk.unit.no)
PRINCIPLES OF FLIGHT
 1 Considering a positive cambered aerofoil, the pitching moment when Cl=0 is: A infinite B positive (nose-up). C negative (nose-down). D equal to zero. 2 The angle between the aeroplane longitudinal axis
1 Considering a positive cambered aerofoil, the pitching moment when Cl=0 is: A infinite B positive (nose-up). C negative (nose-down). D equal to zero. 2 The angle between the aeroplane longitudinal axis
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
Flight and Orbital Mechanics
 Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
Lecture-4. Flow Past Immersed Bodies
 Lecture-4 Flow Past Immersed Bodies Learning objectives After completing this lecture, you should be able to: Identify and discuss the features of external flow Explain the fundamental characteristics
Lecture-4 Flow Past Immersed Bodies Learning objectives After completing this lecture, you should be able to: Identify and discuss the features of external flow Explain the fundamental characteristics
6. 3D Kinematics DE2-EA 2.1: M4DE. Dr Connor Myant
 DE2-EA 2.1: M4DE Dr Connor Myant 6. 3D Kinematics Comments and corrections to connor.myant@imperial.ac.uk Lecture resources may be found on Blackboard and at http://connormyant.com Contents Three-Dimensional
DE2-EA 2.1: M4DE Dr Connor Myant 6. 3D Kinematics Comments and corrections to connor.myant@imperial.ac.uk Lecture resources may be found on Blackboard and at http://connormyant.com Contents Three-Dimensional
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
Spacecraft and Aircraft Dynamics
 Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 4: Contributions to Longitudinal Stability Aircraft Dynamics Lecture 4 In this lecture, we will discuss Airfoils:
Spacecraft and Aircraft Dynamics Matthew M. Peet Illinois Institute of Technology Lecture 4: Contributions to Longitudinal Stability Aircraft Dynamics Lecture 4 In this lecture, we will discuss Airfoils:
Dynamics and Control Preliminary Examination Topics
 Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Lecture #AC 3. Aircraft Lateral Dynamics. Spiral, Roll, and Dutch Roll Modes
 Lecture #AC 3 Aircraft Lateral Dynamics Spiral, Roll, and Dutch Roll Modes Copy right 2003 by Jon at h an H ow 1 Spring 2003 16.61 AC 3 2 Aircraft Lateral Dynamics Using a procedure similar to the longitudinal
Lecture #AC 3 Aircraft Lateral Dynamics Spiral, Roll, and Dutch Roll Modes Copy right 2003 by Jon at h an H ow 1 Spring 2003 16.61 AC 3 2 Aircraft Lateral Dynamics Using a procedure similar to the longitudinal
EVOLVING DOCUMENT ME 5070 Flight Dynamics
 EVOLVING DOCUMENT ME 5070 Flight Dynamics Homework Date of this version: March 20, 2015 Hyperlinks look like this Dates in headings below are the dates of the associated lecture Due January 27, 2015 1
EVOLVING DOCUMENT ME 5070 Flight Dynamics Homework Date of this version: March 20, 2015 Hyperlinks look like this Dates in headings below are the dates of the associated lecture Due January 27, 2015 1
FREQUENCY DOMAIN FLUTTER ANALYSIS OF AIRCRAFT WING IN SUBSONIC FLOW
 FREQUENCY DOMAIN FLUTTER ANALYSIS OF AIRCRAFT WING IN SUBSONIC FLOW Ms.K.Niranjana 1, Mr.A.Daniel Antony 2 1 UG Student, Department of Aerospace Engineering, Karunya University, (India) 2 Assistant professor,
FREQUENCY DOMAIN FLUTTER ANALYSIS OF AIRCRAFT WING IN SUBSONIC FLOW Ms.K.Niranjana 1, Mr.A.Daniel Antony 2 1 UG Student, Department of Aerospace Engineering, Karunya University, (India) 2 Assistant professor,
Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 10.
 Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 1. D1 Nonlinear Flight-Mechanics Models and their Linearisation D1.1 Introduction
Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 1. D1 Nonlinear Flight-Mechanics Models and their Linearisation D1.1 Introduction
Time Response of Dynamic Systems! Multi-Dimensional Trajectories Position, velocity, and acceleration are vectors
 Time Response of Dynamic Systems Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Multi-dimensional trajectories Numerical integration Linear and nonlinear systems Linearization
Time Response of Dynamic Systems Robert Stengel Robotics and Intelligent Systems MAE 345, Princeton University, 217 Multi-dimensional trajectories Numerical integration Linear and nonlinear systems Linearization
Direct spatial motion simulation of aircraft subjected to engine failure
 Direct spatial motion simulation of aircraft subjected to engine failure Yassir ABBAS*,1, Mohammed MADBOULI 2, Gamal EL-BAYOUMI 2 *Corresponding author *,1 Aeronautical Engineering Department, Engineering
Direct spatial motion simulation of aircraft subjected to engine failure Yassir ABBAS*,1, Mohammed MADBOULI 2, Gamal EL-BAYOUMI 2 *Corresponding author *,1 Aeronautical Engineering Department, Engineering
18. Linearization: the phugoid equation as example
 79 18. Linearization: the phugoid equation as example Linearization is one of the most important and widely used mathematical terms in applications to Science and Engineering. In the context of Differential
79 18. Linearization: the phugoid equation as example Linearization is one of the most important and widely used mathematical terms in applications to Science and Engineering. In the context of Differential
Aircraft stability and control Prof: A. K. Ghosh Dept of Aerospace Engineering Indian Institute of Technology Kanpur
 Aircraft stability and control Prof: A. K. Ghosh Dept of Aerospace Engineering Indian Institute of Technology Kanpur Lecture- 05 Stability: Tail Contribution and Static Margin (Refer Slide Time: 00:15)
Aircraft stability and control Prof: A. K. Ghosh Dept of Aerospace Engineering Indian Institute of Technology Kanpur Lecture- 05 Stability: Tail Contribution and Static Margin (Refer Slide Time: 00:15)
Design and modelling of an airship station holding controller for low cost satellite operations
 AIAA Guidance, Navigation, and Control Conference and Exhibit 15-18 August 25, San Francisco, California AIAA 25-62 Design and modelling of an airship station holding controller for low cost satellite
AIAA Guidance, Navigation, and Control Conference and Exhibit 15-18 August 25, San Francisco, California AIAA 25-62 Design and modelling of an airship station holding controller for low cost satellite
Study. Aerodynamics. Small UAV. AVL Software
 Study of the Aerodynamics of a Small UAV using AVL Software Prepared For: Prof. Luis Bernal Prepared By: Paul Dorman April 24, 2006 Table of Contents Introduction.1 Aerodynamic Data...2 Flight Assessment..
Study of the Aerodynamics of a Small UAV using AVL Software Prepared For: Prof. Luis Bernal Prepared By: Paul Dorman April 24, 2006 Table of Contents Introduction.1 Aerodynamic Data...2 Flight Assessment..
Robot Dynamics - Rotary Wing UAS: Control of a Quadrotor
 Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
Robot Dynamics Rotary Wing AS: Control of a Quadrotor 5-85- V Marco Hutter, Roland Siegwart and Thomas Stastny Robot Dynamics - Rotary Wing AS: Control of a Quadrotor 7..6 Contents Rotary Wing AS. Introduction
Effect of Moment of Inertia and Aerodynamics Parameters on Aerodynamic Coupling in Roll Mode
 Parameters on Aerodynamic Coupling in Roll Raed Abbas Jessam Electromechanical Engineering Department, University of Technology/ Baghdad Email:- ra_tb2006@yahoo.com Received on: 19/6 /2011 & Accepted on:
Parameters on Aerodynamic Coupling in Roll Raed Abbas Jessam Electromechanical Engineering Department, University of Technology/ Baghdad Email:- ra_tb2006@yahoo.com Received on: 19/6 /2011 & Accepted on:
Hong Kong Institute of Vocational Education (Tsing Yi) Higher Diploma in Civil Engineering Structural Mechanics. Chapter 2 SECTION PROPERTIES
 Higher Diploma in Civil Engineering Structural Mechanics. Chapter 2 SECTION PROPERTIES") Section Properties Centroid The centroid of an area is the point about which the area could be balanced if it was supported from that point. The word is derived from the word center, and it can be though
Section Properties Centroid The centroid of an area is the point about which the area could be balanced if it was supported from that point. The word is derived from the word center, and it can be though
A SIMPLIFIED ANALYSIS OF NONLINEAR LONGITUDINAL DYNAMICS AND CONCEPTUAL CONTROL SYSTEM DESIGN
 A SIMPLIFIED ANALYSIS OF NONLINEAR LONGITUDINAL DYNAMICS AND CONCEPTUAL CONTROL SYSTEM DESIGN ROBBIE BUNGE 1. Introduction The longitudinal dynamics of fixed-wing aircraft are a case in which classical
A SIMPLIFIED ANALYSIS OF NONLINEAR LONGITUDINAL DYNAMICS AND CONCEPTUAL CONTROL SYSTEM DESIGN ROBBIE BUNGE 1. Introduction The longitudinal dynamics of fixed-wing aircraft are a case in which classical
Dynamic Modeling of Fixed-Wing UAVs
 Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
Autonomous Systems Laboratory Dynamic Modeling of Fixed-Wing UAVs (Fixed-Wing Unmanned Aerial Vehicles) A. Noth, S. Bouabdallah and R. Siegwart Version.0 1/006 1 Introduction Dynamic modeling is an important
Design, Analysis and Research Corporation (DARcorporation) ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I
 ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I") Design, Analysis and Research Corporation (DARcorporation) ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I Copyright 00 by Dr. Jan Roskam Year of Print, 00 (Errata Revised August
Design, Analysis and Research Corporation (DARcorporation) ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I Copyright 00 by Dr. Jan Roskam Year of Print, 00 (Errata Revised August
Drag Computation (1)
") Drag Computation (1) Why drag so concerned Its effects on aircraft performances On the Concorde, one count drag increase ( C D =.0001) requires two passengers, out of the 90 ~ 100 passenger capacity, be
Drag Computation (1) Why drag so concerned Its effects on aircraft performances On the Concorde, one count drag increase ( C D =.0001) requires two passengers, out of the 90 ~ 100 passenger capacity, be
Experimental Aircraft Parameter Estimation
 Experimental Aircraft Parameter Estimation AA241X May 14 2014 Stanford University Overview 1. System & Parameter Identification 2. Energy Performance Estimation Propulsion OFF Propulsion ON 3. Stability
Experimental Aircraft Parameter Estimation AA241X May 14 2014 Stanford University Overview 1. System & Parameter Identification 2. Energy Performance Estimation Propulsion OFF Propulsion ON 3. Stability
Modeling of a Small Unmanned Aerial Vehicle
 Modeling of a Small Unmanned Aerial Vehicle A. Elsayed Ahmed, A. Hafez, A. N. Ouda, H. Eldin Hussein Ahmed, H. Mohamed Abd-Elkader Abstract Unmanned aircraft systems (UAS) are playing increasingly prominent
Modeling of a Small Unmanned Aerial Vehicle A. Elsayed Ahmed, A. Hafez, A. N. Ouda, H. Eldin Hussein Ahmed, H. Mohamed Abd-Elkader Abstract Unmanned aircraft systems (UAS) are playing increasingly prominent
4-7. Elementary aeroelasticity
 a Aeroelasticity Dynamic... Dynamic Static stability... Static 4-7 Istability Load Divergence Control Flutter Buffeting Dynamic distribution reversal response Elementary aeroelasticity Aircraft structures,
a Aeroelasticity Dynamic... Dynamic Static stability... Static 4-7 Istability Load Divergence Control Flutter Buffeting Dynamic distribution reversal response Elementary aeroelasticity Aircraft structures,
( ) (where v = pr ) v V
 (where v = pr ) v V") Problem # The DOF idealized wing whose cross-section is shown in Figure. has leading edge and trailing edge control surfaces. There is no initial angle of attack when the two control surfaces are undeflected.
Problem # The DOF idealized wing whose cross-section is shown in Figure. has leading edge and trailing edge control surfaces. There is no initial angle of attack when the two control surfaces are undeflected.
The Physics of Low-Altitude Aerobatic Flying By: Eric Boyd. SPH 3U Mr. Leck
 The Physics of Low-Altitude Aerobatic Flying By: Eric Boyd SPH 3U Mr. Leck Submitted: December 19, 2008 Introduction For over half a century, large amounts of the public have come to watch a series of
The Physics of Low-Altitude Aerobatic Flying By: Eric Boyd SPH 3U Mr. Leck Submitted: December 19, 2008 Introduction For over half a century, large amounts of the public have come to watch a series of
Stability and Control Some Characteristics of Lifting Surfaces, and Pitch-Moments
 Stability and Control Some Characteristics of Lifting Surfaces, and Pitch-Moments The lifting surfaces of a vehicle generally include the wings, the horizontal and vertical tail, and other surfaces such
Stability and Control Some Characteristics of Lifting Surfaces, and Pitch-Moments The lifting surfaces of a vehicle generally include the wings, the horizontal and vertical tail, and other surfaces such
Use of Compliant Hinges to Tailor Flight Dynamics of Unmanned Aircraft
 JOURNAL OF AIRCRAFT Use of Compliant Hinges to Tailor Flight Dynamics of Unmanned Aircraft Emily A. Leylek and Mark Costello Georgia Institute of Technology, Atlanta, Georgia 30332 DOI: 10.2514/1.C033056
JOURNAL OF AIRCRAFT Use of Compliant Hinges to Tailor Flight Dynamics of Unmanned Aircraft Emily A. Leylek and Mark Costello Georgia Institute of Technology, Atlanta, Georgia 30332 DOI: 10.2514/1.C033056
MAV Unsteady Characteristics in-flight Measurement with the Help of SmartAP Autopilot
 MAV Unsteady Characteristics in-flight Measurement with the Help of SmartAP Autopilot S. Serokhvostov, N. Pushchin and K. Shilov Moscow Institute of Physics and Technology Department of Aeromechanics and
MAV Unsteady Characteristics in-flight Measurement with the Help of SmartAP Autopilot S. Serokhvostov, N. Pushchin and K. Shilov Moscow Institute of Physics and Technology Department of Aeromechanics and
Aerodynamics SYST 460/560. George Mason University Fall 2008 CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH. Copyright Lance Sherry (2008)
") Aerodynamics SYST 460/560 George Mason University Fall 2008 1 CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH Copyright Lance Sherry (2008) Ambient & Static Pressure Ambient Pressure Static Pressure 2 Ambient
Aerodynamics SYST 460/560 George Mason University Fall 2008 1 CENTER FOR AIR TRANSPORTATION SYSTEMS RESEARCH Copyright Lance Sherry (2008) Ambient & Static Pressure Ambient Pressure Static Pressure 2 Ambient
AE Stability and Control of Aerospace Vehicles
 AE 430 - Stability and Control of Aerospace Vehicles Aircraft Equations of Motion Dynamic Stability Degree of dynamic stability: time it takes the motion to damp to half or to double the amplitude of its
AE 430 - Stability and Control of Aerospace Vehicles Aircraft Equations of Motion Dynamic Stability Degree of dynamic stability: time it takes the motion to damp to half or to double the amplitude of its
Aim. Unit abstract. Learning outcomes. QCF level: 6 Credit value: 15
 Unit T23: Flight Dynamics Unit code: J/504/0132 QCF level: 6 Credit value: 15 Aim The aim of this unit is to develop learners understanding of aircraft flight dynamic principles by considering and analysing
Unit T23: Flight Dynamics Unit code: J/504/0132 QCF level: 6 Credit value: 15 Aim The aim of this unit is to develop learners understanding of aircraft flight dynamic principles by considering and analysing
Applications Linear Control Design Techniques in Aircraft Control I
 Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
Given the water behaves as shown above, which direction will the cylinder rotate?
 water stream fixed but free to rotate Given the water behaves as shown above, which direction will the cylinder rotate? ) Clockwise 2) Counter-clockwise 3) Not enough information F y U 0 U F x V=0 V=0
water stream fixed but free to rotate Given the water behaves as shown above, which direction will the cylinder rotate? ) Clockwise 2) Counter-clockwise 3) Not enough information F y U 0 U F x V=0 V=0
Quadrotor Modeling and Control
 16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
Simulation of Non-Linear Flight Control Using Backstepping Method
 Proceedings of the 2 nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7 8, 2015 Paper No. 182 Simulation of Non-Linear Flight Control Using Backstepping
Proceedings of the 2 nd International Conference of Control, Dynamic Systems, and Robotics Ottawa, Ontario, Canada, May 7 8, 2015 Paper No. 182 Simulation of Non-Linear Flight Control Using Backstepping
Stability and Control Analysis in Twin-Boom Vertical Stabilizer Unmanned Aerial Vehicle (UAV)
") International Journal of Scientific and Research Publications, Volume 4, Issue 2, February 2014 1 Stability and Control Analysis in Twin-Boom Vertical Stabilizer Unmanned Aerial Vehicle UAV Lasantha Kurukularachchi*;
International Journal of Scientific and Research Publications, Volume 4, Issue 2, February 2014 1 Stability and Control Analysis in Twin-Boom Vertical Stabilizer Unmanned Aerial Vehicle UAV Lasantha Kurukularachchi*;
Fluid Mechanics. Forces on Fluid Elements. Fluid Elements - Definition:
 Fluid Mechanics Chapter 2: Fluid Statics Lecture 3 Forces on Fluid Elements Fluid Elements - Definition: Fluid element can be defined as an infinitesimal region of the fluid continuum in isolation from
Fluid Mechanics Chapter 2: Fluid Statics Lecture 3 Forces on Fluid Elements Fluid Elements - Definition: Fluid element can be defined as an infinitesimal region of the fluid continuum in isolation from
Chapter 1 Introduction (Lectures 1,2 and 3)
") Chapter 1 Introduction (Lectures 1,2 and 3) Keywords : Importance of stability and control analysis ; brief historical background ; basic concepts static stability, dynamic stability, longitudinal, lateral
Chapter 1 Introduction (Lectures 1,2 and 3) Keywords : Importance of stability and control analysis ; brief historical background ; basic concepts static stability, dynamic stability, longitudinal, lateral
Rotational & Rigid-Body Mechanics. Lectures 3+4
 Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Design, Analysis and Research Corporation (DARcorporation) ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I
 ERRATA: Airplane Flight Dynamics and Automatic Flight Controls Part I") Design, Analysis and Research orporation (DARcorporation) ERRATA: Airplane Flight Dynamics and Automatic Flight ontrols Part I opyright 995 by Dr. Jan Roskam Year of Print, 995 (Errata Revised August 7,
Design, Analysis and Research orporation (DARcorporation) ERRATA: Airplane Flight Dynamics and Automatic Flight ontrols Part I opyright 995 by Dr. Jan Roskam Year of Print, 995 (Errata Revised August 7,
Aeroelastic Gust Response
 Aeroelastic Gust Response Civil Transport Aircraft - xxx Presented By: Fausto Gill Di Vincenzo 04-06-2012 What is Aeroelasticity? Aeroelasticity studies the effect of aerodynamic loads on flexible structures,
Aeroelastic Gust Response Civil Transport Aircraft - xxx Presented By: Fausto Gill Di Vincenzo 04-06-2012 What is Aeroelasticity? Aeroelasticity studies the effect of aerodynamic loads on flexible structures,
Aerodynamics. High-Lift Devices
 High-Lift Devices Devices to increase the lift coefficient by geometry changes (camber and/or chord) and/or boundary-layer control (avoid flow separation - Flaps, trailing edge devices - Slats, leading
High-Lift Devices Devices to increase the lift coefficient by geometry changes (camber and/or chord) and/or boundary-layer control (avoid flow separation - Flaps, trailing edge devices - Slats, leading
MODELLING AND CONTROL OF A SYMMETRIC FLAPPING WING VEHICLE: AN OPTIMAL CONTROL APPROACH. A Thesis JUSTIN PATRICK JACKSON
 MODELLING AND CONTROL OF A SYMMETRIC FLAPPING WING VEHICLE: AN OPTIMAL CONTROL APPROACH A Thesis by JUSTIN PATRICK JACKSON Submitted to the Office of Graduate Studies of Texas A&M University in partial
MODELLING AND CONTROL OF A SYMMETRIC FLAPPING WING VEHICLE: AN OPTIMAL CONTROL APPROACH A Thesis by JUSTIN PATRICK JACKSON Submitted to the Office of Graduate Studies of Texas A&M University in partial
Modelling the Dynamic Response of a Morphing Wing with Active Winglets
 AIAA Atmospheric Flight Mechanics Conference and Exhibit 20-23 August 2007, Hilton Head, South Carolina AIAA 2007-6500 Modelling the Dynamic Response of a Morphing Wing with Active Winglets N. Ameri, M.
AIAA Atmospheric Flight Mechanics Conference and Exhibit 20-23 August 2007, Hilton Head, South Carolina AIAA 2007-6500 Modelling the Dynamic Response of a Morphing Wing with Active Winglets N. Ameri, M.
ABSTRACT. Thomas Woodrow Sukut, 2d Lt USAF
 ABSTRACT Nonlinear Aeroelastic Analysis of UAVs: Deterministic and Stochastic Approaches By Thomas Woodrow Sukut, 2d Lt USAF Aeroelastic aspects of unmanned aerial vehicles (UAVs) is analyzed by treatment
ABSTRACT Nonlinear Aeroelastic Analysis of UAVs: Deterministic and Stochastic Approaches By Thomas Woodrow Sukut, 2d Lt USAF Aeroelastic aspects of unmanned aerial vehicles (UAVs) is analyzed by treatment
Small lightweight aircraft navigation in the presence of wind
 Small lightweight aircraft navigation in the presence of wind Cornel-Alexandru Brezoescu To cite this version: Cornel-Alexandru Brezoescu. Small lightweight aircraft navigation in the presence of wind.
Small lightweight aircraft navigation in the presence of wind Cornel-Alexandru Brezoescu To cite this version: Cornel-Alexandru Brezoescu. Small lightweight aircraft navigation in the presence of wind.
MODIFICATION OF AERODYNAMIC WING LOADS BY FLUIDIC DEVICES
 Journal of KONES Powertrain and Transport, Vol. 21, No. 2 2014 MODIFICATION OF AERODYNAMIC WING LOADS BY FLUIDIC DEVICES Institute of Aviation Department of Aerodynamics and Flight Mechanics Krakowska
Journal of KONES Powertrain and Transport, Vol. 21, No. 2 2014 MODIFICATION OF AERODYNAMIC WING LOADS BY FLUIDIC DEVICES Institute of Aviation Department of Aerodynamics and Flight Mechanics Krakowska
ANALYSIS OF AUTOPILOT SYSTEM BASED ON BANK ANGLE OF SMALL UAV
 ANALYSIS OF AUTOPILOT SYSTEM BASED ON BANK ANGLE OF SMALL UAV MAY SAN HLAING, ZAW MIN NAING, 3 MAUNG MAUNG LATT, 4 HLA MYO TUN,4 Department of Electronic Engineering, Mandalay Technological University,
ANALYSIS OF AUTOPILOT SYSTEM BASED ON BANK ANGLE OF SMALL UAV MAY SAN HLAING, ZAW MIN NAING, 3 MAUNG MAUNG LATT, 4 HLA MYO TUN,4 Department of Electronic Engineering, Mandalay Technological University,
A First Order Model of a Variable Camber Wing for a Civil Passenger Aircraft
 A First Order Model of a Variable Camber Wing for a Civil Passenger Aircraft Tristan Martindale A dissertation submitted to the Faculty of Engineering and the Built Environment, University of the Witwatersrand,
A First Order Model of a Variable Camber Wing for a Civil Passenger Aircraft Tristan Martindale A dissertation submitted to the Faculty of Engineering and the Built Environment, University of the Witwatersrand,
Aero-Propulsive-Elastic Modeling Using OpenVSP
 Aero-Propulsive-Elastic Modeling Using OpenVSP August 8, 213 Kevin W. Reynolds Intelligent Systems Division, Code TI NASA Ames Research Center Our Introduction To OpenVSP Overview! Motivation and Background!
Aero-Propulsive-Elastic Modeling Using OpenVSP August 8, 213 Kevin W. Reynolds Intelligent Systems Division, Code TI NASA Ames Research Center Our Introduction To OpenVSP Overview! Motivation and Background!
Chapter 8 Part 1. Attitude Dynamics: Disturbance Torques AERO-423
 Chapter 8 Part 1 Attitude Dynamics: Disturbance Torques AEO-43 Types of Disturbance Torques Solar Pressure Dominant torque for geosynchronous satellites Gravity Gradient Can be disturbance or control torque
Chapter 8 Part 1 Attitude Dynamics: Disturbance Torques AEO-43 Types of Disturbance Torques Solar Pressure Dominant torque for geosynchronous satellites Gravity Gradient Can be disturbance or control torque
Aeroelasticity. Lecture 7: Practical Aircraft Aeroelasticity. G. Dimitriadis. AERO0032-1, Aeroelasticity and Experimental Aerodynamics, Lecture 7
 Aeroelasticity Lecture 7: Practical Aircraft Aeroelasticity G. Dimitriadis AERO0032-1, Aeroelasticity and Experimental Aerodynamics, Lecture 7 1 Non-sinusoidal motion Theodorsen analysis requires that
Aeroelasticity Lecture 7: Practical Aircraft Aeroelasticity G. Dimitriadis AERO0032-1, Aeroelasticity and Experimental Aerodynamics, Lecture 7 1 Non-sinusoidal motion Theodorsen analysis requires that
Lecture 31. EXAMPLES: EQUATIONS OF MOTION USING NEWTON AND ENERGY APPROACHES
 Lecture 31. EXAMPLES: EQUATIONS OF MOTION USING NEWTON AND ENERGY APPROACHES Figure 5.29 (a) Uniform beam moving in frictionless slots and attached to ground via springs at A and B. The vertical force
Lecture 31. EXAMPLES: EQUATIONS OF MOTION USING NEWTON AND ENERGY APPROACHES Figure 5.29 (a) Uniform beam moving in frictionless slots and attached to ground via springs at A and B. The vertical force
A model of an aircraft towing a cable-body system
 ANZIAM J. 47 (EMAC2005) pp.c615 C632, 2007 C615 A model of an aircraft towing a cable-body system C. K. H. Chin R. L. May (Received 2 November 2005; revised 31 January 2007) Abstract We integrate together
ANZIAM J. 47 (EMAC2005) pp.c615 C632, 2007 C615 A model of an aircraft towing a cable-body system C. K. H. Chin R. L. May (Received 2 November 2005; revised 31 January 2007) Abstract We integrate together
SENSITIVITY ANALYSIS FOR DYNAMIC MODELS OF AERIAL MUNITIONS
 Journal of KONES Powertrain and Transport, Vol. 0, No. 4 013 SENSITIVITY ANALYSIS FOR DYNAMIC MODELS OF AERIAL MUNITIONS Andrzej yluk Air Force Institute of Technology Ksicia Bolesawa Street 6, 01-494
Journal of KONES Powertrain and Transport, Vol. 0, No. 4 013 SENSITIVITY ANALYSIS FOR DYNAMIC MODELS OF AERIAL MUNITIONS Andrzej yluk Air Force Institute of Technology Ksicia Bolesawa Street 6, 01-494
DESIGN PROJECT REPORT: Longitudinal and lateral-directional stability augmentation of Boeing 747 for cruise flight condition.
 DESIGN PROJECT REPORT: Longitudinal and lateral-directional stability augmentation of Boeing 747 for cruise flight condition. Prepared By: Kushal Shah Advisor: Professor John Hodgkinson Graduate Advisor:
DESIGN PROJECT REPORT: Longitudinal and lateral-directional stability augmentation of Boeing 747 for cruise flight condition. Prepared By: Kushal Shah Advisor: Professor John Hodgkinson Graduate Advisor:
MEEN 363 Notes Copyright, Dara W. Childs
 MEEN 363 Notes Copyright, Dara W. Childs Lecture 1. PARTICLE KINEMATICS IN A PLANE Kinematics: Geometric in nature, defines motion without regard to forces that cause motion or result from motion. Kinetics:
MEEN 363 Notes Copyright, Dara W. Childs Lecture 1. PARTICLE KINEMATICS IN A PLANE Kinematics: Geometric in nature, defines motion without regard to forces that cause motion or result from motion. Kinetics:
1/30. Rigid Body Rotations. Dave Frank
 . 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
. 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid