Model Based Clustering of Count Processes Data
|
|
|
- Myles Bond
- 5 years ago
- Views:
Transcription
1 Model Based Clustering of Count Processes Data Tin Lok James Ng, Brendan Murphy Insight Centre for Data Analytics School of Mathematics and Statistics May 15, 2017 Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
2 Background: Model Based Clustering Sample observations arise from a distribution that is a mixture of two or more components. Each component is described by a probability density function and an associated probability in the mixture. Commonly used to model p-dimensional observations x 1,, x n, e.g. mixture of G components, each of which is multivariate normal with density f g (x µ g, Σ g ), g = 1,, G. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
3 Background: Model Based Clustering Majority of research in model based clustering focus on sample observations consist of multivariate data taking values in R p with p 1 (Fraley and Raftery, 2002; Raftery and Dean, 2006). Recently, clustering techniques for functional data have been proposed where the observation is a stochastic process taking values in an infinite dimensional space (Abraham et al., 2003; Giacofci et al., 2013). Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
4 Model Based Clustering for Count Processes In various applications, one typically observes a collection of count processes data, where each count process consists of event times observed over a fixed time interval. Some examples are occurrence of natural disasters in various locations, observed times of failure of multiple light bulbs, temporal sequence of action potentials generated by neurons. The area of model based clustering techniques for count processes data are under-developed. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
5 Model Based Clustering for Count Processes We assume a collection of N count processes data x = {x i } N i=1 observed in a fixed interval [0, T ) R. Each observation x i = {x i,1, x i,2,, x i,ni } consists of a set of event times with x i,1 x i,2 x i,ni for i = 1,, N. We assume a total of G mixture components and each observation arises from one of the G components. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
6 Model Specification: Poisson Process Non-homogeneous Poisson Process (NHPP) is a popular method in various applications where count process data are encountered. A temporal NHPP defined on [0, T ) is associated with a non-negative and locally integrable intensity function λ(x) : [0, T ) R +. For any bounded region B [0, T ), the number of events N(B) follows a Poisson distribution with rate Λ(B) = B λ(x)dx. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
7 Model Specification: Gaussian Process A random scalar function g(s) : S R is said to have a Gaussian process prior, if for any finite collection of points s 1,, s N S, the function values g(s 1 ),, g(s N ) follow a multivariate Gaussian distribution. The Gaussian process prior can be defined by a mean function m(.) : S R and a covariance function k(.,.) : S S R which further depend on hyper-paramters φ (Rasmussen and Williams, 2006). Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
8 Model Specification: Gaussian Cox Process The combination of a Poisson process and a Gaussian process prior is known as a Gaussian Cox process. It provides an attractive modeling framework to infer the underlying intensity function since one only needs to specify the form of the mean and covariance functions. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
9 Model Specification: Mixture of Poisson Processes We assume each count process observation x i is governed by one of the G underlying normalized intensity functions {λ g } G g=1, where λ g (x) : [0, T ) R +, T 0 λ g (x)dx = 1. We let τ g, g = 1,, G, be the probability that a count process observation is associated with intensity function λ g. We introduce a scaling factor α i for each count process observation so that x i NHPP(α i λ g ) with probability τ g. We employ the logistic density transform to the intensity functions {λ g } G g=1, λ g (x) = exp(f g (x)) T 0 exp(f g (s))ds (1) Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
10 Model Specification: Mixture of Poisson Processes A zero-mean Gaussian process prior GP(0, k(x, x )) is assigned to the random functions f = {f g } G g=1. The one dimensional squared-exponential covariance function is assumed which has the following form k(x, x ) = σ 2 exp( 1 2l 2 (x x ) 2 ) (2) with hyperparameters (σ, l) where l determines the smoothness of the covariance function. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
11 Model Specification: Mixture of Poisson Processes To make inference more tractable, we further discretise the interval [0, T ) into m equally spaced sub-intervals, ) and let {t k } m k=1 be the mid points of the sub-intervals, k = 1,, m. [ T (k 1) m, Tk m We assume that the random functions {f g } G g=1 and hence the intensity functions {λ g } G g=1 are piecewise constant on each interval. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
12 Inference Given observed event times {x i } of N count processes, our objective is to group them into G clusters while simulateneously estimate the intensity functions of the G Poisson processes. Let θ denote the set of parameters, the penalised likelihood function is given by L(θ; x) = N ( G n i τ g exp( α i ) i=1 g=1 j=1 )( G λ g (x i,j ) g=1 ) p(f g ) (3) where p(.) is the density associate with GP(0, k(x, x )) prior. In non-bayesian setting, the Gaussian process prior imposed on random functions f g can be understood as penalty terms. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
13 EM Algorithm We let z = {z i } n i=1 denote the latent assignment of intensity functions to count processes, where z i = (z i,1,, z i,g ) T and { 1 if count process i has intensity function α i λ g z i,g = 0 otherwise We can write the complete data likelihood function as L(θ; x, z) = N i=1 g=1 G ( n i ) zig ( G τ g exp( α i ) (α i λ g (x i,j )) j=1 g=1 ) p(f g ) (4) Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
14 EM Algorithm For the E-step, we need to compute the probabilities of cluster assignment for each count process, π g i Pr(Z i,g = 1 x i, θ (t) ) = τ g (t) G h=1 τ (t) h exp( α (t) ) n i for i = 1,, N and g = 1,, G. i exp( α (t) i ) n i j=1 (α(t) i λ g (t) (x i,j )) j=1 (α(t) i λ (t) h (x i,j)) Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
15 EM Algorithm For the M-step, we need to update the model parameters {τ g } G g=1, {α i } N i=1 and {f g } G g=1 by expected complete data likelihood function. The updates for {α i } N i=1 and {τ g } G g=1 are straightforward. ˆα i = n i τˆ g = N i=1 πg i N No closed form updates available for {f g } G g=1. We employ Newton s method to obtain estimates for {f g } G g=1. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
16 Standard Error Estimates for Intensity Functions It is often desirable to obtain standard errors and construct confidence intervals for the estimated intensity functions {ˆλ g } G g=1. For each observation j and each intensity function λ g, we apply the Jackknife method to obtain the estimates ˆλ (j) g with the j th count process observation removed from the data. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
17 Standard Error Estimates for Intensity Functions For g = 1,, G and for t [0, T ), we let λ g (t) = 1 N N j=1 ˆλ (j) g (t) The esimtated variance of intensity function g at time t is given by Var jack (ˆλ g (t)) = N 1 N N j=1 (ˆλ (j) g (t) λ g (t)) 2 The confidence interval for estimated intensity function ˆλ g is given by (ˆλg (t k ) c Var jack (ˆλ g (t)), ˆλ ) g (t) + c Var jack (ˆλ g (t)) for some c > 0. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
18 Model Selection: Cross Validated Likelihood We want to determine the number of mixture components G and the hyperparameters (σ, l). The cross validated likelihood approach (Smyth, 2000) is used to choose the number of components and hyperparameters in the mixture model. For a fixed model, the method works by repetitively partitioning the data set into two sets, one of which is to train the model and obtain parameter estimates by maximising the log-likelihood and the other is for testing the model by evaluating its log-likelihood. Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
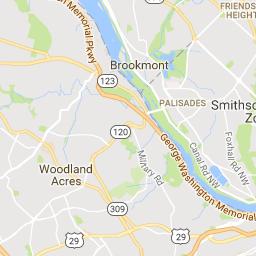
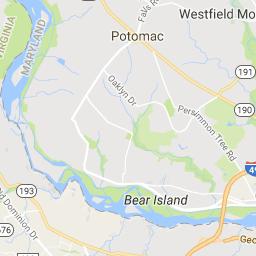
19 Application: Washington Bike Sharing Scheme Data Set Information including the start date and time of a trip, the end date and time of a trip, start station and end stations are publicly available. 1. For each station in the bike sharing scheme, we consider the end time of a trip as an event. We fit the model to the data over the period of 18 March 2016 through 24 March 2016 with 362 active stations and a total of events. 1 Historical data available at Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
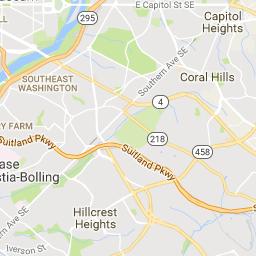
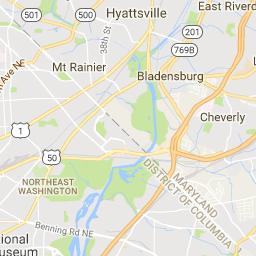
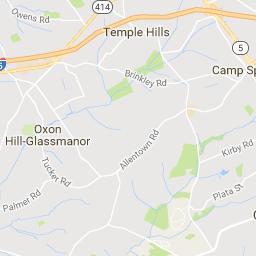

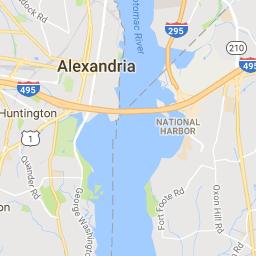
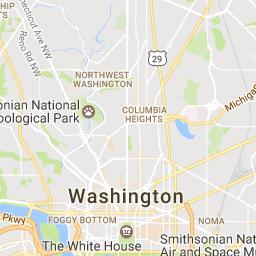
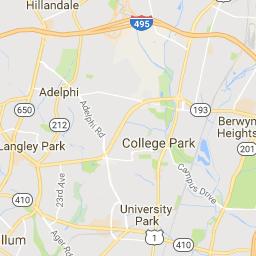
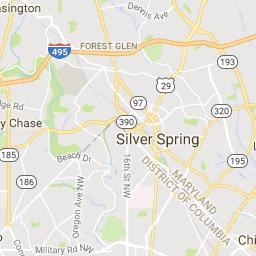
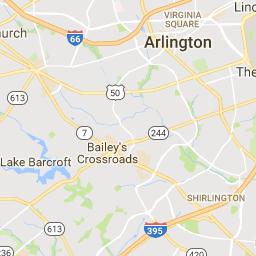
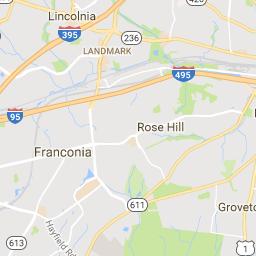





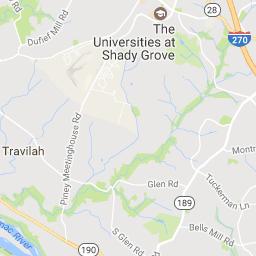




20 Application: Washington Bike Sharing Scheme Data Set Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
21 Application: Washington Bike Sharing Scheme Data Set Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
22 Reference Abraham, C., Cornillon, P. A., Matzner-Lø ber, E., and Molinari, N. (2003), Unsupervised curve clustering using B-splines, Scand. J. Statist., 30, Eagle, N. and Pentland, A. (2006), Reality mining: sensing complex social systems, Journal Personal and Ubiquitous Computing, 10, Fraley, C. and Raftery, A. E. (2002), Model-based clustering, discriminant analysis, and density estimation, J. Amer. Statist. Assoc., 97, Giacofci, M., Lambert-Lacroix, S., Marot, G., and Picard, F. (2013), Wavelet-based clustering for mixed-effects functional models in high dimension, Biometrics, 69, Raftery, A. E. and Dean, N. (2006), Variable selection for model-based clustering, J. Amer. Statist. Assoc., 101, Rasmussen, C. E. and Williams, C. K. I. (2006), Gaussian processes for machine learning, Adaptive Computation and Machine Learning, MIT Press, Cambridge, MA. Smyth, P. (2000), Model selection for probabilistic clustering using cross-validated likelihood, Statistics and Computing, 10, Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
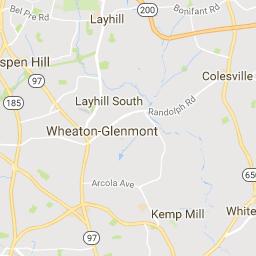
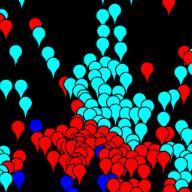
23 Application: Reality Mining Data Set The Reality Mining Dataset was collected in 2004 (Eagle and Pentland, 2006). The goal of this experiment was to explore the capabilities of the smart phones that enabled social scientists to investigate human interactions. 75 students or faculty in MIT Media Laboratory and 25 students at the MIT Slogan business school were the subjects of the experiement where the time of phone calls and SMS messages were recorded. For each subject in the study, we treat the time when an outgoing call was made as an event time. We focus on the core of 86 people who have made outgoing calls during the period between 24 September 2004 and 8 January Data obtained from Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
 CASI May 15, 2017 24 /")
24 Application: Reality Mining Data Set Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
 CASI May 15, 2017 25 /")
25 Application: Reality Mining Data Set Figure: Jackknife Estimates of Standard Errors for Reality Mining Data set Tin Lok James Ng, Brendan Murphy (Insight) CASI May 15, / 25
ICML Scalable Bayesian Inference on Point processes. with Gaussian Processes. Yves-Laurent Kom Samo & Stephen Roberts
 ICML 2015 Scalable Nonparametric Bayesian Inference on Point Processes with Gaussian Processes Machine Learning Research Group and Oxford-Man Institute University of Oxford July 8, 2015 Point Processes
ICML 2015 Scalable Nonparametric Bayesian Inference on Point Processes with Gaussian Processes Machine Learning Research Group and Oxford-Man Institute University of Oxford July 8, 2015 Point Processes
Gaussian processes. Chuong B. Do (updated by Honglak Lee) November 22, 2008
 November 22, 2008") Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Gaussian Process Regression
 Gaussian Process Regression 4F1 Pattern Recognition, 21 Carl Edward Rasmussen Department of Engineering, University of Cambridge November 11th - 16th, 21 Rasmussen (Engineering, Cambridge) Gaussian Process
Gaussian Process Regression 4F1 Pattern Recognition, 21 Carl Edward Rasmussen Department of Engineering, University of Cambridge November 11th - 16th, 21 Rasmussen (Engineering, Cambridge) Gaussian Process
Gaussian Process Regression Model in Spatial Logistic Regression
 Journal of Physics: Conference Series PAPER OPEN ACCESS Gaussian Process Regression Model in Spatial Logistic Regression To cite this article: A Sofro and A Oktaviarina 018 J. Phys.: Conf. Ser. 947 01005
Journal of Physics: Conference Series PAPER OPEN ACCESS Gaussian Process Regression Model in Spatial Logistic Regression To cite this article: A Sofro and A Oktaviarina 018 J. Phys.: Conf. Ser. 947 01005
STAT 518 Intro Student Presentation
 STAT 518 Intro Student Presentation Wen Wei Loh April 11, 2013 Title of paper Radford M. Neal [1999] Bayesian Statistics, 6: 475-501, 1999 What the paper is about Regression and Classification Flexible
STAT 518 Intro Student Presentation Wen Wei Loh April 11, 2013 Title of paper Radford M. Neal [1999] Bayesian Statistics, 6: 475-501, 1999 What the paper is about Regression and Classification Flexible
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
Bayesian Methods for Machine Learning
 Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
CSci 8980: Advanced Topics in Graphical Models Gaussian Processes
 CSci 8980: Advanced Topics in Graphical Models Gaussian Processes Instructor: Arindam Banerjee November 15, 2007 Gaussian Processes Outline Gaussian Processes Outline Parametric Bayesian Regression Gaussian
CSci 8980: Advanced Topics in Graphical Models Gaussian Processes Instructor: Arindam Banerjee November 15, 2007 Gaussian Processes Outline Gaussian Processes Outline Parametric Bayesian Regression Gaussian
PILCO: A Model-Based and Data-Efficient Approach to Policy Search
 PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
Nonparametric Bayesian Methods - Lecture I
 Nonparametric Bayesian Methods - Lecture I Harry van Zanten Korteweg-de Vries Institute for Mathematics CRiSM Masterclass, April 4-6, 2016 Overview of the lectures I Intro to nonparametric Bayesian statistics
Nonparametric Bayesian Methods - Lecture I Harry van Zanten Korteweg-de Vries Institute for Mathematics CRiSM Masterclass, April 4-6, 2016 Overview of the lectures I Intro to nonparametric Bayesian statistics
Neutron inverse kinetics via Gaussian Processes
 Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Nonparameteric Regression:
 Nonparameteric Regression: Nadaraya-Watson Kernel Regression & Gaussian Process Regression Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro,
Nonparameteric Regression: Nadaraya-Watson Kernel Regression & Gaussian Process Regression Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro,
Gaussian Processes. Le Song. Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012
 Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Minimum Message Length Inference and Mixture Modelling of Inverse Gaussian Distributions
 Minimum Message Length Inference and Mixture Modelling of Inverse Gaussian Distributions Daniel F. Schmidt Enes Makalic Centre for Molecular, Environmental, Genetic & Analytic (MEGA) Epidemiology School
Minimum Message Length Inference and Mixture Modelling of Inverse Gaussian Distributions Daniel F. Schmidt Enes Makalic Centre for Molecular, Environmental, Genetic & Analytic (MEGA) Epidemiology School
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
Gaussian Processes in Machine Learning
 Gaussian Processes in Machine Learning November 17, 2011 CharmGil Hong Agenda Motivation GP : How does it make sense? Prior : Defining a GP More about Mean and Covariance Functions Posterior : Conditioning
Gaussian Processes in Machine Learning November 17, 2011 CharmGil Hong Agenda Motivation GP : How does it make sense? Prior : Defining a GP More about Mean and Covariance Functions Posterior : Conditioning
Density Estimation. Seungjin Choi
 Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Introduction to Gaussian Process
 Introduction to Gaussian Process CS 778 Chris Tensmeyer CS 478 INTRODUCTION 1 What Topic? Machine Learning Regression Bayesian ML Bayesian Regression Bayesian Non-parametric Gaussian Process (GP) GP Regression
Introduction to Gaussian Process CS 778 Chris Tensmeyer CS 478 INTRODUCTION 1 What Topic? Machine Learning Regression Bayesian ML Bayesian Regression Bayesian Non-parametric Gaussian Process (GP) GP Regression
Curves clustering with approximation of the density of functional random variables
 Curves clustering with approximation of the density of functional random variables Julien Jacques and Cristian Preda Laboratoire Paul Painlevé, UMR CNRS 8524, University Lille I, Lille, France INRIA Lille-Nord
Curves clustering with approximation of the density of functional random variables Julien Jacques and Cristian Preda Laboratoire Paul Painlevé, UMR CNRS 8524, University Lille I, Lille, France INRIA Lille-Nord
A Process over all Stationary Covariance Kernels
 A Process over all Stationary Covariance Kernels Andrew Gordon Wilson June 9, 0 Abstract I define a process over all stationary covariance kernels. I show how one might be able to perform inference that
A Process over all Stationary Covariance Kernels Andrew Gordon Wilson June 9, 0 Abstract I define a process over all stationary covariance kernels. I show how one might be able to perform inference that
Probabilistic Models for Learning Data Representations. Andreas Damianou
 Probabilistic Models for Learning Data Representations Andreas Damianou Department of Computer Science, University of Sheffield, UK IBM Research, Nairobi, Kenya, 23/06/2015 Sheffield SITraN Outline Part
Probabilistic Models for Learning Data Representations Andreas Damianou Department of Computer Science, University of Sheffield, UK IBM Research, Nairobi, Kenya, 23/06/2015 Sheffield SITraN Outline Part
Multistate Modeling and Applications
 Multistate Modeling and Applications Yang Yang Department of Statistics University of Michigan, Ann Arbor IBM Research Graduate Student Workshop: Statistics for a Smarter Planet Yang Yang (UM, Ann Arbor)
Multistate Modeling and Applications Yang Yang Department of Statistics University of Michigan, Ann Arbor IBM Research Graduate Student Workshop: Statistics for a Smarter Planet Yang Yang (UM, Ann Arbor)
Tutorial on Gaussian Processes and the Gaussian Process Latent Variable Model
 Tutorial on Gaussian Processes and the Gaussian Process Latent Variable Model (& discussion on the GPLVM tech. report by Prof. N. Lawrence, 06) Andreas Damianou Department of Neuro- and Computer Science,
Tutorial on Gaussian Processes and the Gaussian Process Latent Variable Model (& discussion on the GPLVM tech. report by Prof. N. Lawrence, 06) Andreas Damianou Department of Neuro- and Computer Science,
Introduction to Gaussian Processes
 Introduction to Gaussian Processes Neil D. Lawrence GPSS 10th June 2013 Book Rasmussen and Williams (2006) Outline The Gaussian Density Covariance from Basis Functions Basis Function Representations Constructing
Introduction to Gaussian Processes Neil D. Lawrence GPSS 10th June 2013 Book Rasmussen and Williams (2006) Outline The Gaussian Density Covariance from Basis Functions Basis Function Representations Constructing
GAUSSIAN PROCESS REGRESSION
 GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
State Space Gaussian Processes with Non-Gaussian Likelihoods
 State Space Gaussian Processes with Non-Gaussian Likelihoods Hannes Nickisch 1 Arno Solin 2 Alexander Grigorievskiy 2,3 1 Philips Research, 2 Aalto University, 3 Silo.AI ICML2018 July 13, 2018 Outline
State Space Gaussian Processes with Non-Gaussian Likelihoods Hannes Nickisch 1 Arno Solin 2 Alexander Grigorievskiy 2,3 1 Philips Research, 2 Aalto University, 3 Silo.AI ICML2018 July 13, 2018 Outline
Model Selection for Gaussian Processes
 Institute for Adaptive and Neural Computation School of Informatics,, UK December 26 Outline GP basics Model selection: covariance functions and parameterizations Criteria for model selection Marginal
Institute for Adaptive and Neural Computation School of Informatics,, UK December 26 Outline GP basics Model selection: covariance functions and parameterizations Criteria for model selection Marginal
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 20: Expectation Maximization Algorithm EM for Mixture Models Many figures courtesy Kevin Murphy s
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 20: Expectation Maximization Algorithm EM for Mixture Models Many figures courtesy Kevin Murphy s
System identification and control with (deep) Gaussian processes. Andreas Damianou
 Gaussian processes. Andreas Damianou") System identification and control with (deep) Gaussian processes Andreas Damianou Department of Computer Science, University of Sheffield, UK MIT, 11 Feb. 2016 Outline Part 1: Introduction Part 2: Gaussian
System identification and control with (deep) Gaussian processes Andreas Damianou Department of Computer Science, University of Sheffield, UK MIT, 11 Feb. 2016 Outline Part 1: Introduction Part 2: Gaussian
Reliability Monitoring Using Log Gaussian Process Regression
 COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
Lecture 16 Deep Neural Generative Models
 Lecture 16 Deep Neural Generative Models CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago May 22, 2017 Approach so far: We have considered simple models and then constructed
Lecture 16 Deep Neural Generative Models CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago May 22, 2017 Approach so far: We have considered simple models and then constructed
Machine Learning. Gaussian Mixture Models. Zhiyao Duan & Bryan Pardo, Machine Learning: EECS 349 Fall
 Machine Learning Gaussian Mixture Models Zhiyao Duan & Bryan Pardo, Machine Learning: EECS 349 Fall 2012 1 The Generative Model POV We think of the data as being generated from some process. We assume
Machine Learning Gaussian Mixture Models Zhiyao Duan & Bryan Pardo, Machine Learning: EECS 349 Fall 2012 1 The Generative Model POV We think of the data as being generated from some process. We assume
The Expectation-Maximization Algorithm
 1/29 EM & Latent Variable Models Gaussian Mixture Models EM Theory The Expectation-Maximization Algorithm Mihaela van der Schaar Department of Engineering Science University of Oxford MLE for Latent Variable
1/29 EM & Latent Variable Models Gaussian Mixture Models EM Theory The Expectation-Maximization Algorithm Mihaela van der Schaar Department of Engineering Science University of Oxford MLE for Latent Variable
Prediction of double gene knockout measurements
 Prediction of double gene knockout measurements Sofia Kyriazopoulou-Panagiotopoulou sofiakp@stanford.edu December 12, 2008 Abstract One way to get an insight into the potential interaction between a pair
Prediction of double gene knockout measurements Sofia Kyriazopoulou-Panagiotopoulou sofiakp@stanford.edu December 12, 2008 Abstract One way to get an insight into the potential interaction between a pair
Probability models for machine learning. Advanced topics ML4bio 2016 Alan Moses
 Probability models for machine learning Advanced topics ML4bio 2016 Alan Moses What did we cover in this course so far? 4 major areas of machine learning: Clustering Dimensionality reduction Classification
Probability models for machine learning Advanced topics ML4bio 2016 Alan Moses What did we cover in this course so far? 4 major areas of machine learning: Clustering Dimensionality reduction Classification
Parallel Gaussian Process Optimization with Upper Confidence Bound and Pure Exploration
 Parallel Gaussian Process Optimization with Upper Confidence Bound and Pure Exploration Emile Contal David Buffoni Alexandre Robicquet Nicolas Vayatis CMLA, ENS Cachan, France September 25, 2013 Motivating
Parallel Gaussian Process Optimization with Upper Confidence Bound and Pure Exploration Emile Contal David Buffoni Alexandre Robicquet Nicolas Vayatis CMLA, ENS Cachan, France September 25, 2013 Motivating
Performance Comparison of K-Means and Expectation Maximization with Gaussian Mixture Models for Clustering EE6540 Final Project
 Performance Comparison of K-Means and Expectation Maximization with Gaussian Mixture Models for Clustering EE6540 Final Project Devin Cornell & Sushruth Sastry May 2015 1 Abstract In this article, we explore
Performance Comparison of K-Means and Expectation Maximization with Gaussian Mixture Models for Clustering EE6540 Final Project Devin Cornell & Sushruth Sastry May 2015 1 Abstract In this article, we explore
GWAS V: Gaussian processes
 GWAS V: Gaussian processes Dr. Oliver Stegle Christoh Lippert Prof. Dr. Karsten Borgwardt Max-Planck-Institutes Tübingen, Germany Tübingen Summer 2011 Oliver Stegle GWAS V: Gaussian processes Summer 2011
GWAS V: Gaussian processes Dr. Oliver Stegle Christoh Lippert Prof. Dr. Karsten Borgwardt Max-Planck-Institutes Tübingen, Germany Tübingen Summer 2011 Oliver Stegle GWAS V: Gaussian processes Summer 2011
Introduction to emulators - the what, the when, the why
 School of Earth and Environment INSTITUTE FOR CLIMATE & ATMOSPHERIC SCIENCE Introduction to emulators - the what, the when, the why Dr Lindsay Lee 1 What is a simulator? A simulator is a computer code
School of Earth and Environment INSTITUTE FOR CLIMATE & ATMOSPHERIC SCIENCE Introduction to emulators - the what, the when, the why Dr Lindsay Lee 1 What is a simulator? A simulator is a computer code
Part 2: Multivariate fmri analysis using a sparsifying spatio-temporal prior
 Chalmers Machine Learning Summer School Approximate message passing and biomedicine Part 2: Multivariate fmri analysis using a sparsifying spatio-temporal prior Tom Heskes joint work with Marcel van Gerven
Chalmers Machine Learning Summer School Approximate message passing and biomedicine Part 2: Multivariate fmri analysis using a sparsifying spatio-temporal prior Tom Heskes joint work with Marcel van Gerven
STATS 306B: Unsupervised Learning Spring Lecture 2 April 2
 STATS 306B: Unsupervised Learning Spring 2014 Lecture 2 April 2 Lecturer: Lester Mackey Scribe: Junyang Qian, Minzhe Wang 2.1 Recap In the last lecture, we formulated our working definition of unsupervised
STATS 306B: Unsupervised Learning Spring 2014 Lecture 2 April 2 Lecturer: Lester Mackey Scribe: Junyang Qian, Minzhe Wang 2.1 Recap In the last lecture, we formulated our working definition of unsupervised
Machine Learning Techniques for Computer Vision
 Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
Gaussian Processes (10/16/13)
") STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
Bayesian nonparametric models for bipartite graphs
 Bayesian nonparametric models for bipartite graphs François Caron Department of Statistics, Oxford Statistics Colloquium, Harvard University November 11, 2013 F. Caron 1 / 27 Bipartite networks Readers/Customers
Bayesian nonparametric models for bipartite graphs François Caron Department of Statistics, Oxford Statistics Colloquium, Harvard University November 11, 2013 F. Caron 1 / 27 Bipartite networks Readers/Customers
An Introduction to Gaussian Processes for Spatial Data (Predictions!)
") An Introduction to Gaussian Processes for Spatial Data (Predictions!) Matthew Kupilik College of Engineering Seminar Series Nov 216 Matthew Kupilik UAA GP for Spatial Data Nov 216 1 / 35 Why? When evidence
An Introduction to Gaussian Processes for Spatial Data (Predictions!) Matthew Kupilik College of Engineering Seminar Series Nov 216 Matthew Kupilik UAA GP for Spatial Data Nov 216 1 / 35 Why? When evidence
Statistical Machine Learning Lecture 8: Markov Chain Monte Carlo Sampling
 1 / 27 Statistical Machine Learning Lecture 8: Markov Chain Monte Carlo Sampling Melih Kandemir Özyeğin University, İstanbul, Turkey 2 / 27 Monte Carlo Integration The big question : Evaluate E p(z) [f(z)]
1 / 27 Statistical Machine Learning Lecture 8: Markov Chain Monte Carlo Sampling Melih Kandemir Özyeğin University, İstanbul, Turkey 2 / 27 Monte Carlo Integration The big question : Evaluate E p(z) [f(z)]
Machine Learning for Data Science (CS4786) Lecture 12
 Lecture 12") Machine Learning for Data Science (CS4786) Lecture 12 Gaussian Mixture Models Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2016fa/ Back to K-means Single link is sensitive to outliners We
Machine Learning for Data Science (CS4786) Lecture 12 Gaussian Mixture Models Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2016fa/ Back to K-means Single link is sensitive to outliners We
Factor Analysis (10/2/13)
") STA561: Probabilistic machine learning Factor Analysis (10/2/13) Lecturer: Barbara Engelhardt Scribes: Li Zhu, Fan Li, Ni Guan Factor Analysis Factor analysis is related to the mixture models we have studied.
STA561: Probabilistic machine learning Factor Analysis (10/2/13) Lecturer: Barbara Engelhardt Scribes: Li Zhu, Fan Li, Ni Guan Factor Analysis Factor analysis is related to the mixture models we have studied.
Non-Parametric Bayes
 Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
Linear Dynamical Systems (Kalman filter)
") Linear Dynamical Systems (Kalman filter) (a) Overview of HMMs (b) From HMMs to Linear Dynamical Systems (LDS) 1 Markov Chains with Discrete Random Variables x 1 x 2 x 3 x T Let s assume we have discrete
Linear Dynamical Systems (Kalman filter) (a) Overview of HMMs (b) From HMMs to Linear Dynamical Systems (LDS) 1 Markov Chains with Discrete Random Variables x 1 x 2 x 3 x T Let s assume we have discrete
Machine Learning. Bayesian Regression & Classification. Marc Toussaint U Stuttgart
 Machine Learning Bayesian Regression & Classification learning as inference, Bayesian Kernel Ridge regression & Gaussian Processes, Bayesian Kernel Logistic Regression & GP classification, Bayesian Neural
Machine Learning Bayesian Regression & Classification learning as inference, Bayesian Kernel Ridge regression & Gaussian Processes, Bayesian Kernel Logistic Regression & GP classification, Bayesian Neural
Lecture 5: GPs and Streaming regression
 Lecture 5: GPs and Streaming regression Gaussian Processes Information gain Confidence intervals COMP-652 and ECSE-608, Lecture 5 - September 19, 2017 1 Recall: Non-parametric regression Input space X
Lecture 5: GPs and Streaming regression Gaussian Processes Information gain Confidence intervals COMP-652 and ECSE-608, Lecture 5 - September 19, 2017 1 Recall: Non-parametric regression Input space X
Unsupervised Learning
 2018 EE448, Big Data Mining, Lecture 7 Unsupervised Learning Weinan Zhang Shanghai Jiao Tong University http://wnzhang.net http://wnzhang.net/teaching/ee448/index.html ML Problem Setting First build and
2018 EE448, Big Data Mining, Lecture 7 Unsupervised Learning Weinan Zhang Shanghai Jiao Tong University http://wnzhang.net http://wnzhang.net/teaching/ee448/index.html ML Problem Setting First build and
Probabilistic & Unsupervised Learning
 Probabilistic & Unsupervised Learning Gaussian Processes Maneesh Sahani maneesh@gatsby.ucl.ac.uk Gatsby Computational Neuroscience Unit, and MSc ML/CSML, Dept Computer Science University College London
Probabilistic & Unsupervised Learning Gaussian Processes Maneesh Sahani maneesh@gatsby.ucl.ac.uk Gatsby Computational Neuroscience Unit, and MSc ML/CSML, Dept Computer Science University College London
Normalising constants and maximum likelihood inference
 Normalising constants and maximum likelihood inference Jakob G. Rasmussen Department of Mathematics Aalborg University Denmark March 9, 2011 1/14 Today Normalising constants Approximation of normalising
Normalising constants and maximum likelihood inference Jakob G. Rasmussen Department of Mathematics Aalborg University Denmark March 9, 2011 1/14 Today Normalising constants Approximation of normalising
The Variational Gaussian Approximation Revisited
 The Variational Gaussian Approximation Revisited Manfred Opper Cédric Archambeau March 16, 2009 Abstract The variational approximation of posterior distributions by multivariate Gaussians has been much
The Variational Gaussian Approximation Revisited Manfred Opper Cédric Archambeau March 16, 2009 Abstract The variational approximation of posterior distributions by multivariate Gaussians has been much
Bayesian Machine Learning
 Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 3 Stochastic Gradients, Bayesian Inference, and Occam s Razor https://people.orie.cornell.edu/andrew/orie6741 Cornell University August
Bayesian Machine Learning Andrew Gordon Wilson ORIE 6741 Lecture 3 Stochastic Gradients, Bayesian Inference, and Occam s Razor https://people.orie.cornell.edu/andrew/orie6741 Cornell University August
Computer Vision Group Prof. Daniel Cremers. 9. Gaussian Processes - Regression
 Group Prof. Daniel Cremers 9. Gaussian Processes - Regression Repetition: Regularized Regression Before, we solved for w using the pseudoinverse. But: we can kernelize this problem as well! First step:
Group Prof. Daniel Cremers 9. Gaussian Processes - Regression Repetition: Regularized Regression Before, we solved for w using the pseudoinverse. But: we can kernelize this problem as well! First step:
Bayesian Learning. HT2015: SC4 Statistical Data Mining and Machine Learning. Maximum Likelihood Principle. The Bayesian Learning Framework
 HT5: SC4 Statistical Data Mining and Machine Learning Dino Sejdinovic Department of Statistics Oxford http://www.stats.ox.ac.uk/~sejdinov/sdmml.html Maximum Likelihood Principle A generative model for
HT5: SC4 Statistical Data Mining and Machine Learning Dino Sejdinovic Department of Statistics Oxford http://www.stats.ox.ac.uk/~sejdinov/sdmml.html Maximum Likelihood Principle A generative model for
Mixtures of Negative Binomial distributions for modelling overdispersion in RNA-Seq data
 Mixtures of Negative Binomial distributions for modelling overdispersion in RNA-Seq data Cinzia Viroli 1 joint with E. Bonafede 1, S. Robin 2 & F. Picard 3 1 Department of Statistical Sciences, University
Mixtures of Negative Binomial distributions for modelling overdispersion in RNA-Seq data Cinzia Viroli 1 joint with E. Bonafede 1, S. Robin 2 & F. Picard 3 1 Department of Statistical Sciences, University
Outline. Supervised Learning. Hong Chang. Institute of Computing Technology, Chinese Academy of Sciences. Machine Learning Methods (Fall 2012)
") Outline Hong Chang Institute of Computing Technology, Chinese Academy of Sciences Machine Learning Methods (Fall 2012) Outline Outline I 1 Linear Models for Regression Linear Regression Probabilistic Interpretation
Outline Hong Chang Institute of Computing Technology, Chinese Academy of Sciences Machine Learning Methods (Fall 2012) Outline Outline I 1 Linear Models for Regression Linear Regression Probabilistic Interpretation
Computer Vision Group Prof. Daniel Cremers. 4. Gaussian Processes - Regression
 Group Prof. Daniel Cremers 4. Gaussian Processes - Regression Definition (Rep.) Definition: A Gaussian process is a collection of random variables, any finite number of which have a joint Gaussian distribution.
Group Prof. Daniel Cremers 4. Gaussian Processes - Regression Definition (Rep.) Definition: A Gaussian process is a collection of random variables, any finite number of which have a joint Gaussian distribution.
An Introduction to Statistical and Probabilistic Linear Models
 An Introduction to Statistical and Probabilistic Linear Models Maximilian Mozes Proseminar Data Mining Fakultät für Informatik Technische Universität München June 07, 2017 Introduction In statistical learning
An Introduction to Statistical and Probabilistic Linear Models Maximilian Mozes Proseminar Data Mining Fakultät für Informatik Technische Universität München June 07, 2017 Introduction In statistical learning
Machine Learning - MT & 5. Basis Expansion, Regularization, Validation
 Machine Learning - MT 2016 4 & 5. Basis Expansion, Regularization, Validation Varun Kanade University of Oxford October 19 & 24, 2016 Outline Basis function expansion to capture non-linear relationships
Machine Learning - MT 2016 4 & 5. Basis Expansion, Regularization, Validation Varun Kanade University of Oxford October 19 & 24, 2016 Outline Basis function expansion to capture non-linear relationships
Introduction. Chapter 1
 Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
STA 414/2104: Lecture 8
 STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable models Background PCA
STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable models Background PCA
Sum-Product Networks. STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 17, 2017
 Sum-Product Networks STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 17, 2017 Introduction Outline What is a Sum-Product Network? Inference Applications In more depth
Sum-Product Networks STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 17, 2017 Introduction Outline What is a Sum-Product Network? Inference Applications In more depth
Maximum Likelihood Estimation. only training data is available to design a classifier
 Introduction to Pattern Recognition [ Part 5 ] Mahdi Vasighi Introduction Bayesian Decision Theory shows that we could design an optimal classifier if we knew: P( i ) : priors p(x i ) : class-conditional
Introduction to Pattern Recognition [ Part 5 ] Mahdi Vasighi Introduction Bayesian Decision Theory shows that we could design an optimal classifier if we knew: P( i ) : priors p(x i ) : class-conditional
Time-varying failure rate for system reliability analysis in large-scale railway risk assessment simulation
 Time-varying failure rate for system reliability analysis in large-scale railway risk assessment simulation H. Zhang, E. Cutright & T. Giras Center of Rail Safety-Critical Excellence, University of Virginia,
Time-varying failure rate for system reliability analysis in large-scale railway risk assessment simulation H. Zhang, E. Cutright & T. Giras Center of Rail Safety-Critical Excellence, University of Virginia,
Tractable Nonparametric Bayesian Inference in Poisson Processes with Gaussian Process Intensities
 Tractable Nonparametric Bayesian Inference in Poisson Processes with Gaussian Process Intensities Ryan Prescott Adams rpa23@cam.ac.uk Cavendish Laboratory, University of Cambridge, Cambridge CB3 HE, UK
Tractable Nonparametric Bayesian Inference in Poisson Processes with Gaussian Process Intensities Ryan Prescott Adams rpa23@cam.ac.uk Cavendish Laboratory, University of Cambridge, Cambridge CB3 HE, UK
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Modeling human function learning with Gaussian processes
 Modeling human function learning with Gaussian processes Thomas L. Griffiths Christopher G. Lucas Joseph J. Williams Department of Psychology University of California, Berkeley Berkeley, CA 94720-1650
Modeling human function learning with Gaussian processes Thomas L. Griffiths Christopher G. Lucas Joseph J. Williams Department of Psychology University of California, Berkeley Berkeley, CA 94720-1650
Variational Model Selection for Sparse Gaussian Process Regression
 Variational Model Selection for Sparse Gaussian Process Regression Michalis K. Titsias School of Computer Science University of Manchester 7 September 2008 Outline Gaussian process regression and sparse
Variational Model Selection for Sparse Gaussian Process Regression Michalis K. Titsias School of Computer Science University of Manchester 7 September 2008 Outline Gaussian process regression and sparse
Bayesian Support Vector Machines for Feature Ranking and Selection
 Bayesian Support Vector Machines for Feature Ranking and Selection written by Chu, Keerthi, Ong, Ghahramani Patrick Pletscher pat@student.ethz.ch ETH Zurich, Switzerland 12th January 2006 Overview 1 Introduction
Bayesian Support Vector Machines for Feature Ranking and Selection written by Chu, Keerthi, Ong, Ghahramani Patrick Pletscher pat@student.ethz.ch ETH Zurich, Switzerland 12th January 2006 Overview 1 Introduction
Introduction to Machine Learning. Maximum Likelihood and Bayesian Inference. Lecturers: Eran Halperin, Yishay Mansour, Lior Wolf
 1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Yishay Mansour, Lior Wolf 2013-14 We know that X ~ B(n,p), but we do not know p. We get a random sample
1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Yishay Mansour, Lior Wolf 2013-14 We know that X ~ B(n,p), but we do not know p. We get a random sample
Statistical Analysis of Spatio-temporal Point Process Data. Peter J Diggle
 Statistical Analysis of Spatio-temporal Point Process Data Peter J Diggle Department of Medicine, Lancaster University and Department of Biostatistics, Johns Hopkins University School of Public Health
Statistical Analysis of Spatio-temporal Point Process Data Peter J Diggle Department of Medicine, Lancaster University and Department of Biostatistics, Johns Hopkins University School of Public Health
Gaussian Process Regression Forecasting of Computer Network Conditions
 Gaussian Process Regression Forecasting of Computer Network Conditions Christina Garman Bucknell University August 3, 2010 Christina Garman (Bucknell University) GPR Forecasting of NPCs August 3, 2010
Gaussian Process Regression Forecasting of Computer Network Conditions Christina Garman Bucknell University August 3, 2010 Christina Garman (Bucknell University) GPR Forecasting of NPCs August 3, 2010
1 EM algorithm: updating the mixing proportions {π k } ik are the posterior probabilities at the qth iteration of EM.
 Université du Sud Toulon - Var Master Informatique Probabilistic Learning and Data Analysis TD: Model-based clustering by Faicel CHAMROUKHI Solution The aim of this practical wor is to show how the Classification
Université du Sud Toulon - Var Master Informatique Probabilistic Learning and Data Analysis TD: Model-based clustering by Faicel CHAMROUKHI Solution The aim of this practical wor is to show how the Classification
Learning Gaussian Process Models from Uncertain Data
 Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
Gaussian Processes. 1 What problems can be solved by Gaussian Processes?
 Statistical Techniques in Robotics (16-831, F1) Lecture#19 (Wednesday November 16) Gaussian Processes Lecturer: Drew Bagnell Scribe:Yamuna Krishnamurthy 1 1 What problems can be solved by Gaussian Processes?
Statistical Techniques in Robotics (16-831, F1) Lecture#19 (Wednesday November 16) Gaussian Processes Lecturer: Drew Bagnell Scribe:Yamuna Krishnamurthy 1 1 What problems can be solved by Gaussian Processes?
Dynamic Probabilistic Models for Latent Feature Propagation in Social Networks
 Dynamic Probabilistic Models for Latent Feature Propagation in Social Networks Creighton Heaukulani and Zoubin Ghahramani University of Cambridge TU Denmark, June 2013 1 A Network Dynamic network data
Dynamic Probabilistic Models for Latent Feature Propagation in Social Networks Creighton Heaukulani and Zoubin Ghahramani University of Cambridge TU Denmark, June 2013 1 A Network Dynamic network data
Machine Learning Srihari. Gaussian Processes. Sargur Srihari
 Gaussian Processes Sargur Srihari 1 Topics in Gaussian Processes 1. Examples of use of GP 2. Duality: From Basis Functions to Kernel Functions 3. GP Definition and Intuition 4. Linear regression revisited
Gaussian Processes Sargur Srihari 1 Topics in Gaussian Processes 1. Examples of use of GP 2. Duality: From Basis Functions to Kernel Functions 3. GP Definition and Intuition 4. Linear regression revisited
Latent Variable Models and EM Algorithm
 SC4/SM8 Advanced Topics in Statistical Machine Learning Latent Variable Models and EM Algorithm Dino Sejdinovic Department of Statistics Oxford Slides and other materials available at: http://www.stats.ox.ac.uk/~sejdinov/atsml/
SC4/SM8 Advanced Topics in Statistical Machine Learning Latent Variable Models and EM Algorithm Dino Sejdinovic Department of Statistics Oxford Slides and other materials available at: http://www.stats.ox.ac.uk/~sejdinov/atsml/
Machine Learning. B. Unsupervised Learning B.2 Dimensionality Reduction. Lars Schmidt-Thieme, Nicolas Schilling
 Machine Learning B. Unsupervised Learning B.2 Dimensionality Reduction Lars Schmidt-Thieme, Nicolas Schilling Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University
Machine Learning B. Unsupervised Learning B.2 Dimensionality Reduction Lars Schmidt-Thieme, Nicolas Schilling Information Systems and Machine Learning Lab (ISMLL) Institute for Computer Science University
Clustering. Professor Ameet Talwalkar. Professor Ameet Talwalkar CS260 Machine Learning Algorithms March 8, / 26
 Clustering Professor Ameet Talwalkar Professor Ameet Talwalkar CS26 Machine Learning Algorithms March 8, 217 1 / 26 Outline 1 Administration 2 Review of last lecture 3 Clustering Professor Ameet Talwalkar
Clustering Professor Ameet Talwalkar Professor Ameet Talwalkar CS26 Machine Learning Algorithms March 8, 217 1 / 26 Outline 1 Administration 2 Review of last lecture 3 Clustering Professor Ameet Talwalkar
CPSC 340: Machine Learning and Data Mining. Sparse Matrix Factorization Fall 2018
 CPSC 340: Machine Learning and Data Mining Sparse Matrix Factorization Fall 2018 Last Time: PCA with Orthogonal/Sequential Basis When k = 1, PCA has a scaling problem. When k > 1, have scaling, rotation,
CPSC 340: Machine Learning and Data Mining Sparse Matrix Factorization Fall 2018 Last Time: PCA with Orthogonal/Sequential Basis When k = 1, PCA has a scaling problem. When k > 1, have scaling, rotation,
Gaussian processes for inference in stochastic differential equations
 Gaussian processes for inference in stochastic differential equations Manfred Opper, AI group, TU Berlin November 6, 2017 Manfred Opper, AI group, TU Berlin (TU Berlin) inference in SDE November 6, 2017
Gaussian processes for inference in stochastic differential equations Manfred Opper, AI group, TU Berlin November 6, 2017 Manfred Opper, AI group, TU Berlin (TU Berlin) inference in SDE November 6, 2017
Latent Variable Models and EM algorithm
 Latent Variable Models and EM algorithm SC4/SM4 Data Mining and Machine Learning, Hilary Term 2017 Dino Sejdinovic 3.1 Clustering and Mixture Modelling K-means and hierarchical clustering are non-probabilistic
Latent Variable Models and EM algorithm SC4/SM4 Data Mining and Machine Learning, Hilary Term 2017 Dino Sejdinovic 3.1 Clustering and Mixture Modelling K-means and hierarchical clustering are non-probabilistic
University of Cambridge. MPhil in Computer Speech Text & Internet Technology. Module: Speech Processing II. Lecture 2: Hidden Markov Models I
 University of Cambridge MPhil in Computer Speech Text & Internet Technology Module: Speech Processing II Lecture 2: Hidden Markov Models I o o o o o 1 2 3 4 T 1 b 2 () a 12 2 a 3 a 4 5 34 a 23 b () b ()
University of Cambridge MPhil in Computer Speech Text & Internet Technology Module: Speech Processing II Lecture 2: Hidden Markov Models I o o o o o 1 2 3 4 T 1 b 2 () a 12 2 a 3 a 4 5 34 a 23 b () b ()
f(x θ)dx with respect to θ. Assuming certain smoothness conditions concern differentiating under the integral the integral sign, we first obtain
dx with respect to θ. Assuming certain smoothness conditions concern differentiating under the integral the integral sign, we first obtain") 0.1. INTRODUCTION 1 0.1 Introduction R. A. Fisher, a pioneer in the development of mathematical statistics, introduced a measure of the amount of information contained in an observaton from f(x θ). Fisher
0.1. INTRODUCTION 1 0.1 Introduction R. A. Fisher, a pioneer in the development of mathematical statistics, introduced a measure of the amount of information contained in an observaton from f(x θ). Fisher
CS Lecture 19. Exponential Families & Expectation Propagation
 CS 6347 Lecture 19 Exponential Families & Expectation Propagation Discrete State Spaces We have been focusing on the case of MRFs over discrete state spaces Probability distributions over discrete spaces
CS 6347 Lecture 19 Exponential Families & Expectation Propagation Discrete State Spaces We have been focusing on the case of MRFs over discrete state spaces Probability distributions over discrete spaces
LINEAR MODELS FOR CLASSIFICATION. J. Elder CSE 6390/PSYC 6225 Computational Modeling of Visual Perception
 LINEAR MODELS FOR CLASSIFICATION Classification: Problem Statement 2 In regression, we are modeling the relationship between a continuous input variable x and a continuous target variable t. In classification,
LINEAR MODELS FOR CLASSIFICATION Classification: Problem Statement 2 In regression, we are modeling the relationship between a continuous input variable x and a continuous target variable t. In classification,
Variational Bayesian Dirichlet-Multinomial Allocation for Exponential Family Mixtures
 17th Europ. Conf. on Machine Learning, Berlin, Germany, 2006. Variational Bayesian Dirichlet-Multinomial Allocation for Exponential Family Mixtures Shipeng Yu 1,2, Kai Yu 2, Volker Tresp 2, and Hans-Peter
17th Europ. Conf. on Machine Learning, Berlin, Germany, 2006. Variational Bayesian Dirichlet-Multinomial Allocation for Exponential Family Mixtures Shipeng Yu 1,2, Kai Yu 2, Volker Tresp 2, and Hans-Peter
Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes
 Lecture#21 (Monday November 12) Gaussian Processes") Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan 1, M. Koval and P. Parashar 1 Applications of Gaussian
Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan 1, M. Koval and P. Parashar 1 Applications of Gaussian
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
Advanced Introduction to Machine Learning CMU-10715
 Advanced Introduction to Machine Learning CMU-10715 Gaussian Processes Barnabás Póczos http://www.gaussianprocess.org/ 2 Some of these slides in the intro are taken from D. Lizotte, R. Parr, C. Guesterin
Advanced Introduction to Machine Learning CMU-10715 Gaussian Processes Barnabás Póczos http://www.gaussianprocess.org/ 2 Some of these slides in the intro are taken from D. Lizotte, R. Parr, C. Guesterin
Probability and Information Theory. Sargur N. Srihari
 Probability and Information Theory Sargur N. srihari@cedar.buffalo.edu 1 Topics in Probability and Information Theory Overview 1. Why Probability? 2. Random Variables 3. Probability Distributions 4. Marginal
Probability and Information Theory Sargur N. srihari@cedar.buffalo.edu 1 Topics in Probability and Information Theory Overview 1. Why Probability? 2. Random Variables 3. Probability Distributions 4. Marginal