Introduction to emulators - the what, the when, the why
|
|
|
- Rosaline Rice
- 6 years ago
- Views:
Transcription

1 School of Earth and Environment INSTITUTE FOR CLIMATE & ATMOSPHERIC SCIENCE Introduction to emulators - the what, the when, the why Dr Lindsay Lee 1

2 What is a simulator? A simulator is a computer code used to represent some real world process 2
3 Why simulate? Understand Which aerosol are most effective at cooling the climate? Predict Could aerosol be used to cool the climate for geoengineering? 3
4 Notation y = f(x) represents the simulation process y is the simulator output x is the simulator input f is the simulator 4
5 Uncertainty in simulation Y = f X Computer codes are imperfect representations of the real world. How do these imperfections affect our understanding and predictions? What is the effect on Y? 5

6 Uncertainty in climate simulators 6
7 What is X? X are model inputs/parameters They may be spatial fields/time series They may be single values used globally or regionally 7
8 Where X is a spatial field or series We will represent the uncertainty in X by a single value to perturb the whole field, or series (maybe regionally, but mostly globally) 8

9 Uncertainty in aerosol simulator inputs Diagram courtesy of PNNL 9
10 Uncertainty in simulator inputs X is uncertain Y is uncertain x can be given uncertainty distribution G Marginally x k has distribution G k Obtain y i = f(x i ) for given x i from G 10


")


11 Simulator complexity Simulators contain lots of equations (hundreds of lines of code) Simulator resolution increases with computer power Credit: NOAA 11
12 Bottom line f is often too complex to simulate many x i from G to characterise the effect of uncertainty on y 12
13 Emulation Replace f with f f is the emulator f is much quicker to run but accurately represents f 13
14 More accurately Replace y k = f(x) with y k = f(x) Define an output (or selection of) to be emulated - doesn t replace the whole simulator for all research 14
15 What is y? From the simulator y can be any/all model output/diagnostics For emulation y must be more restricted y is often a scalar representing a single model output, at a particular time and location Eg. global mean temperature for 2000 total number for particulate matter aerosol > 2.5um in a model grid box y could be a spatial field, or a time series, or EOF/PCAs, or a selection of model outputs 15
16 Emulator complexity The complexity of the emulator is dependent on the complexity of the model output to be emulated 16
17 Continuing.. We will carry on assuming y is scalar and x is a collection of scalar values x = x 1, x 2, x 3,, x p for p uncertain parameters Use a selection of x i, y i from f to build f 17
18 When is an emulator useful? uncertainty analysis sensitivity analysis Quantify the impact of uncertainty on model output Understand model response to uncertain inputs And the model is too complex to do the sampling required 18
19 A statistical emulator An emulator that gives estimates of its own uncertainty We tend to use the Gaussian process 19

20 The Gaussian process emulator, (Rasmussen and Williams, 2006 & O Hagan 2006). Each point in space has a Gaussian distribution Each collection of points has a multivariate Gaussian distribution The whole collection is a Gaussian process In its basic form requires smooth output Does not require the output to be Gaussian 20
21 The GP prior Set up the Gaussian process prior function f x β, ~ GP(h x T β, 2 c(x, x )) h x T β is the mean function c x, x is the covariance function β, are hyperparameters 21
22 Specifying the GP mean Use the mean function to specify any functional form known to exist In the absence of prior information we tend to specify it as constant or a linear regression formula h x = 1 h x = β 0 + β 1 x 1 + β 2 x β p x p 22
23 What does the prior mean function do? When there are very few simulator runs to give information the function is weighted towards the prior mean Outside the bounds of the simulator runs the emulator tends towards the prior mean With more (well-chosen) simulator runs the hyperparameters β are better estimated 23
24 β hyperparameters Can be plugged in if a particular regression model is required Usually use maximum likelihood to estimate them and plug-in Could use a Bayesian approach but timeconsuming 24
25 Specifying the GP covariance The covariance function should reflect c x, x = 1 and that c x, x decreases as x x increases Includes further hyperparameters δ that specify the speed of covariance decrease with increasing x x cov f x, f(x σ = σ 2 c(x, x ) 25
26 Typical choices for c(x, x ) Gaussian: c x, x δ = exp{ x x 2 2δ 2 } x x δ Matern 5/2: c x, x δ = + 5(x x ) 2 3δ 2 exp( 5 x x ) δ 26
27 Effect of covariance The uncertainty at simulator runs is 0 unless a nugget is used The uncertainty between points decreases as it gets closer to simulator suns The width of bounds between points increases as δ decreases 27
28 The posterior distribution A Gaussian process, with parameters estimated by the training data Any point can be estimated Uncertainty in the estimate can also be estimated 28
29 Emulator uniqueness The emulator is non-unique Hyperparameters will be different if you re-run Unless you set the seed Using prior information can help stability Often, it s not actually a problem 29
30 Building an emulator From Jill Johnson following O Hagan (2006) 30
 Emulation done gridbox by gridbox for")
31 Aerosol model emulation with DiceKriging (Roustant et al., 2012 & Lee,at al, 2013) Emulation done gridbox by gridbox for sensitivity analysis 31
32 Training data Need to update the prior with simulator points Require these points to provide good information about the function through uncertain space Often consider no prior information regarding particular parts of the space 32
33 Design for training data (McKay et al., 1979) Latin hypercube sampling Good for inactive dimensions Use optimum or maximin May want piecewise LHS 33
34 Latin hypercube sampling 34
35 The marginals 35
36 Sequential design When emulator validation suggests can update the design sequentially If no reason to search particular region, augment the design Can add points sequentially, perhaps Sobol, to particular regions 36
37 Factorial designs These are not recommended The covariance function is better estimated using a variety of distances between points Uncertainty between training points will be very high 37
38 Validation of emulators Have to check the emulator can predict what the emulator would say Usually want to check out of sample Can use leave one out when circumstances dictate 38
39 Aims of validation Prediction value Ensure emulator predictions are Ensure e close to simulator Prediction uncertainty Ensure uncertainty in emulator is small enough for further inference 39
40 40
41 Validation design When out-of-sample tend to design two groups, as per Bastos & O Hagan (2009) 1/3 close to simulated points and 2/3 spaced out Helps reveal particular difficulties 41
42 Validation statistics Individual prediction errors Treat like regression errors, approximately Gaussian and < 2 standardised Mahalanobis distance single summary of individual prediction errors extreme values indicate emulator/simulator mismatch Pivoted Cholesky errors following variance decomposition particular patterns aid interpretation of mismatch 42
43 Validation plots 43

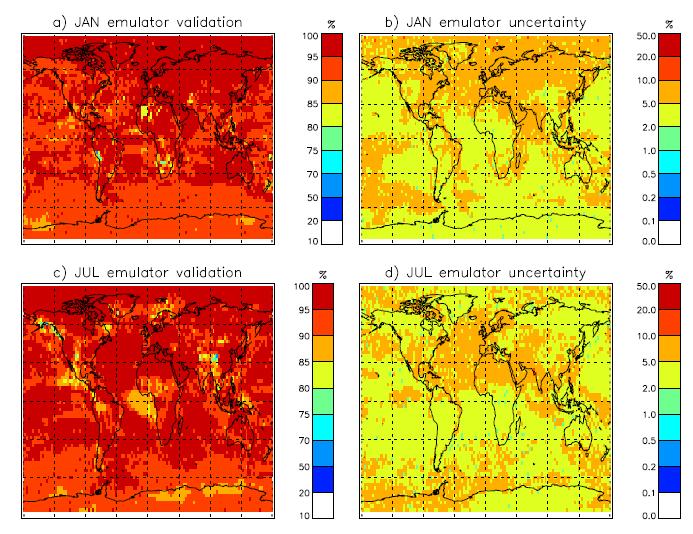
44 Aerosol emulator validation 44
45 Leave one out When out-of-sample is not possible Leave a point out, build emulator, produce validation statistics Repeat for all points and compare statistics Any points with extreme statistics indicate problems 45

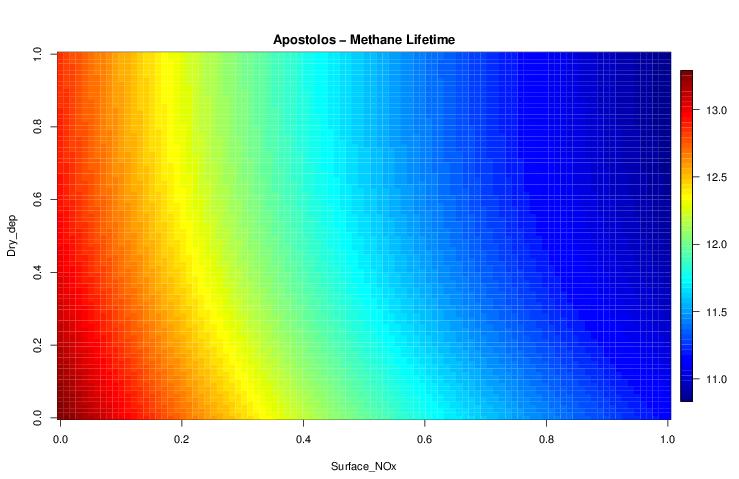
46 Emulation for understanding 46

47 Emulation for uncertainty analysis 47
48 Emulation for sensitivity analysis (Saltelli et al., 2000) using R sensitivity (Pujol et al., 2008) 48

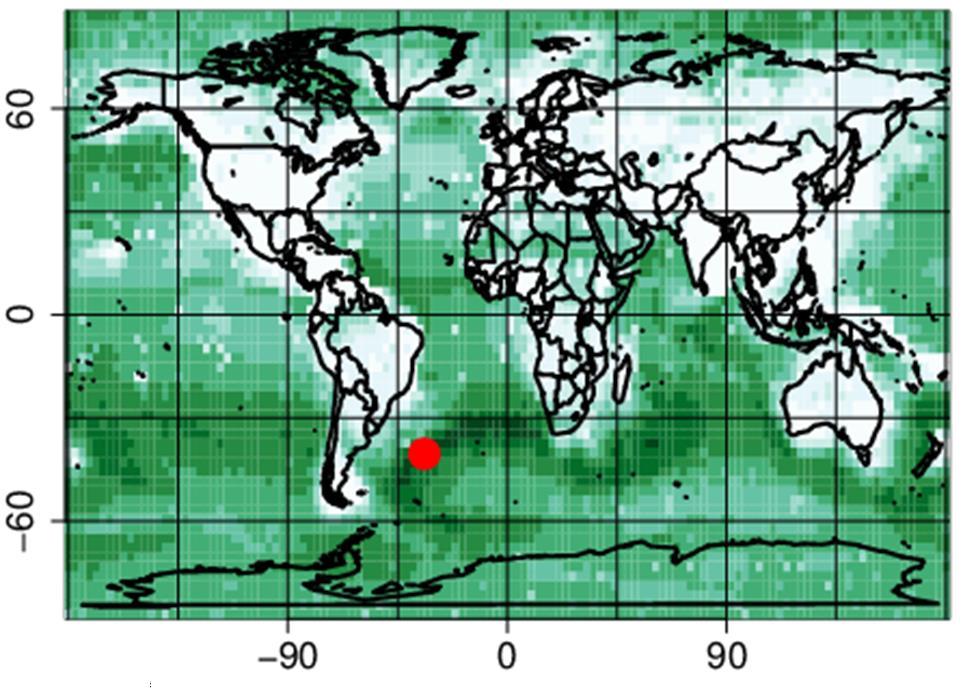
49 Aerosol model sensitivity analysis 49

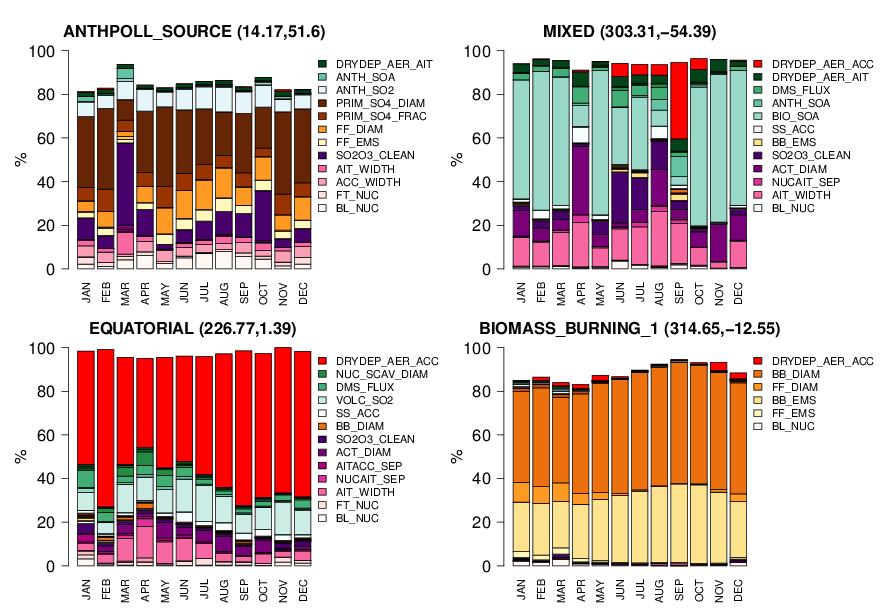
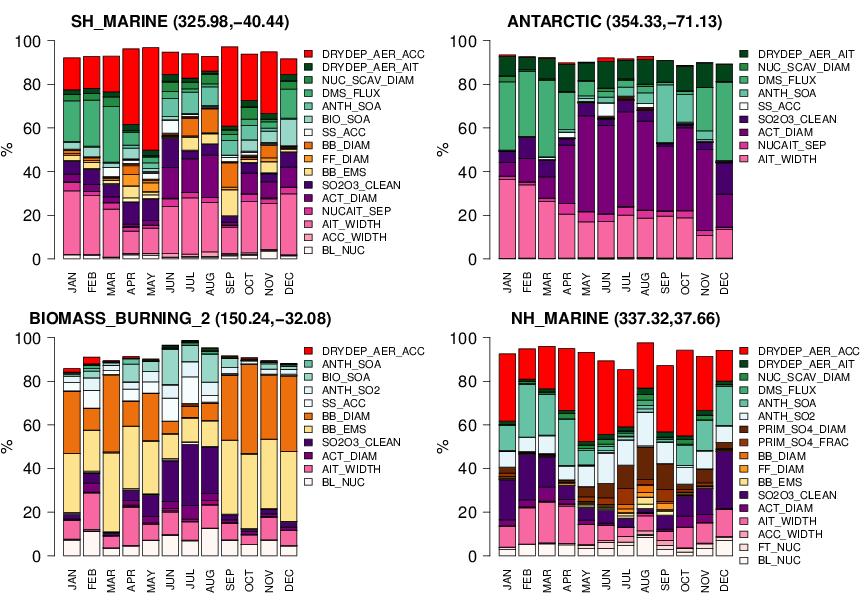
50 Aerosol model sensitivity analysis II 50

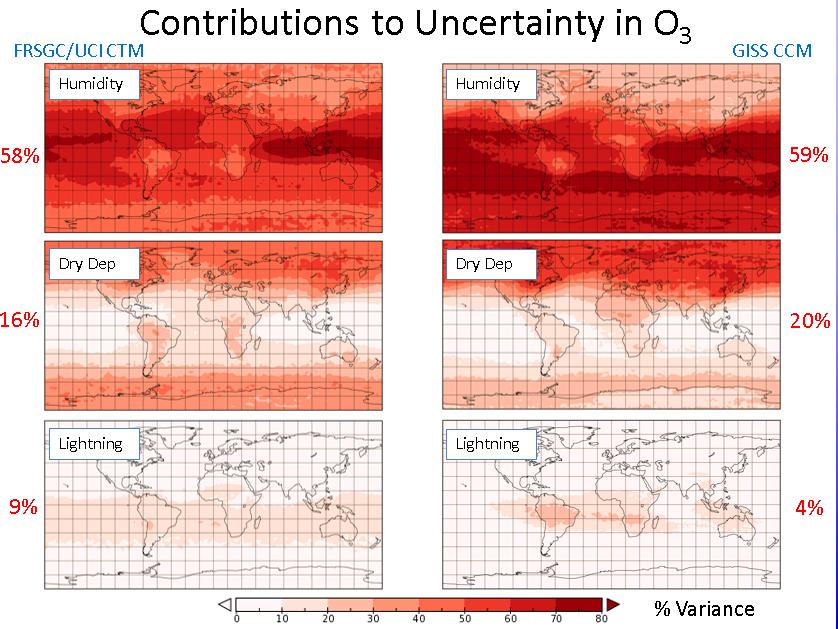
51 Multiple model sensitivity analysis I 51

52 Multiple model sensitivity analysis II 52

53 Emulators for model constraint I 53

54 Emulators for model constraint II 54
55 Extension to GP emulators Stochastic simulator add an estimated nugget to covariance Multivariate emulator must characterise the covariance between multiple outputs Discontinuities could build multiple emulators, perhaps multivariate 55
56 What an emulator can t do Extrapolate too far with confidence Estimate a simulator output it s not trained to Replace the simulator 56
57 When not to use an emulator When the simulator is very cheap to run When it won t validate When you haven t got a good set of simulator runs for training When you aren t sure what you ll use it for 57
58 Methodology references Rasmussen, Carl Edward, and Christopher KI Williams., Gaussian processes for machine learning. Vol. 1. Cambridge: MIT press. O Hagan, A., Bayesian analysis of computer code outputs: a tutorial. Reliability Engineering & System Safety, 91(10), pp Roustant, O., Ginsbourger, D. and Deville, Y., DiceKriging, DiceOptim: Two R packages for the analysis of computer experiments by kriging-based metamodeling and optimization. McKay, M.D., Beckman, R.J. and Conover, W.J., Comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics, 21(2), pp Bastos, L.S. and O Hagan, A., Diagnostics for Gaussian process emulators. Technometrics, 51(4), pp Saltelli, A., Chan, K. and Scott, E.M. eds., Sensitivity analysis (Vol. 1). New York: Wiley. Pujol, G., Iooss, B. and Iooss, M.B., Package sensitivity. 58
59 Selected Lee references 59
Sensitivity analysis and calibration of a global aerosol model
 School of Earth and Environment Sensitivity analysis and calibration of a global aerosol model Lindsay Lee l.a.lee@leeds.ac.uk Ken Carslaw 1, Carly Reddington 1, Kirsty Pringle 1, Jeff Pierce 3, Graham
School of Earth and Environment Sensitivity analysis and calibration of a global aerosol model Lindsay Lee l.a.lee@leeds.ac.uk Ken Carslaw 1, Carly Reddington 1, Kirsty Pringle 1, Jeff Pierce 3, Graham
Gaussian Processes for Computer Experiments
 Gaussian Processes for Computer Experiments Jeremy Oakley School of Mathematics and Statistics, University of Sheffield www.jeremy-oakley.staff.shef.ac.uk 1 / 43 Computer models Computer model represented
Gaussian Processes for Computer Experiments Jeremy Oakley School of Mathematics and Statistics, University of Sheffield www.jeremy-oakley.staff.shef.ac.uk 1 / 43 Computer models Computer model represented
STAT 518 Intro Student Presentation
 STAT 518 Intro Student Presentation Wen Wei Loh April 11, 2013 Title of paper Radford M. Neal [1999] Bayesian Statistics, 6: 475-501, 1999 What the paper is about Regression and Classification Flexible
STAT 518 Intro Student Presentation Wen Wei Loh April 11, 2013 Title of paper Radford M. Neal [1999] Bayesian Statistics, 6: 475-501, 1999 What the paper is about Regression and Classification Flexible
Gaussian Process Regression
 Gaussian Process Regression 4F1 Pattern Recognition, 21 Carl Edward Rasmussen Department of Engineering, University of Cambridge November 11th - 16th, 21 Rasmussen (Engineering, Cambridge) Gaussian Process
Gaussian Process Regression 4F1 Pattern Recognition, 21 Carl Edward Rasmussen Department of Engineering, University of Cambridge November 11th - 16th, 21 Rasmussen (Engineering, Cambridge) Gaussian Process
Gaussian processes. Chuong B. Do (updated by Honglak Lee) November 22, 2008
 November 22, 2008") Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Learning Gaussian Process Models from Uncertain Data
 Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
Learning Gaussian Process Models from Uncertain Data Patrick Dallaire, Camille Besse, and Brahim Chaib-draa DAMAS Laboratory, Computer Science & Software Engineering Department, Laval University, Canada
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Introduction to Gaussian Processes
 Introduction to Gaussian Processes 1 Objectives to express prior knowledge/beliefs about model outputs using Gaussian process (GP) to sample functions from the probability measure defined by GP to build
Introduction to Gaussian Processes 1 Objectives to express prior knowledge/beliefs about model outputs using Gaussian process (GP) to sample functions from the probability measure defined by GP to build
Advanced Introduction to Machine Learning CMU-10715
 Advanced Introduction to Machine Learning CMU-10715 Gaussian Processes Barnabás Póczos http://www.gaussianprocess.org/ 2 Some of these slides in the intro are taken from D. Lizotte, R. Parr, C. Guesterin
Advanced Introduction to Machine Learning CMU-10715 Gaussian Processes Barnabás Póczos http://www.gaussianprocess.org/ 2 Some of these slides in the intro are taken from D. Lizotte, R. Parr, C. Guesterin
Computer experiments with functional inputs and scalar outputs by a norm-based approach
 Computer experiments with functional inputs and scalar outputs by a norm-based approach arxiv:1410.0403v1 [stat.me] 1 Oct 2014 Thomas Muehlenstaedt W. L. Gore & Associates and Jana Fruth Faculty of Statistics,
Computer experiments with functional inputs and scalar outputs by a norm-based approach arxiv:1410.0403v1 [stat.me] 1 Oct 2014 Thomas Muehlenstaedt W. L. Gore & Associates and Jana Fruth Faculty of Statistics,
Sensitivity analysis in linear and nonlinear models: A review. Introduction
 Sensitivity analysis in linear and nonlinear models: A review Caren Marzban Applied Physics Lab. and Department of Statistics Univ. of Washington, Seattle, WA, USA 98195 Consider: Introduction Question:
Sensitivity analysis in linear and nonlinear models: A review Caren Marzban Applied Physics Lab. and Department of Statistics Univ. of Washington, Seattle, WA, USA 98195 Consider: Introduction Question:
Nonparameteric Regression:
 Nonparameteric Regression: Nadaraya-Watson Kernel Regression & Gaussian Process Regression Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro,
Nonparameteric Regression: Nadaraya-Watson Kernel Regression & Gaussian Process Regression Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro,
Optimal Designs for Gaussian Process Models via Spectral Decomposition. Ofir Harari
 Optimal Designs for Gaussian Process Models via Spectral Decomposition Ofir Harari Department of Statistics & Actuarial Sciences, Simon Fraser University September 2014 Dynamic Computer Experiments, 2014
Optimal Designs for Gaussian Process Models via Spectral Decomposition Ofir Harari Department of Statistics & Actuarial Sciences, Simon Fraser University September 2014 Dynamic Computer Experiments, 2014
Tutorial on Gaussian Processes and the Gaussian Process Latent Variable Model
 Tutorial on Gaussian Processes and the Gaussian Process Latent Variable Model (& discussion on the GPLVM tech. report by Prof. N. Lawrence, 06) Andreas Damianou Department of Neuro- and Computer Science,
Tutorial on Gaussian Processes and the Gaussian Process Latent Variable Model (& discussion on the GPLVM tech. report by Prof. N. Lawrence, 06) Andreas Damianou Department of Neuro- and Computer Science,
PILCO: A Model-Based and Data-Efficient Approach to Policy Search
 PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
Gaussian Process Regression Forecasting of Computer Network Conditions
 Gaussian Process Regression Forecasting of Computer Network Conditions Christina Garman Bucknell University August 3, 2010 Christina Garman (Bucknell University) GPR Forecasting of NPCs August 3, 2010
Gaussian Process Regression Forecasting of Computer Network Conditions Christina Garman Bucknell University August 3, 2010 Christina Garman (Bucknell University) GPR Forecasting of NPCs August 3, 2010
Statistical Techniques in Robotics (16-831, F12) Lecture#20 (Monday November 12) Gaussian Processes
 Lecture#20 (Monday November 12) Gaussian Processes") Statistical Techniques in Robotics (6-83, F) Lecture# (Monday November ) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan Applications of Gaussian Processes (a) Inverse Kinematics
Statistical Techniques in Robotics (6-83, F) Lecture# (Monday November ) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan Applications of Gaussian Processes (a) Inverse Kinematics
Gaussian Process Regression and Emulation
 Gaussian Process Regression and Emulation STAT8810, Fall 2017 M.T. Pratola September 22, 2017 Today Experimental Design; Sensitivity Analysis Designing Your Experiment If you will run a simulator model,
Gaussian Process Regression and Emulation STAT8810, Fall 2017 M.T. Pratola September 22, 2017 Today Experimental Design; Sensitivity Analysis Designing Your Experiment If you will run a simulator model,
Neutron inverse kinetics via Gaussian Processes
 Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Introduction to Gaussian-process based Kriging models for metamodeling and validation of computer codes
 Introduction to Gaussian-process based Kriging models for metamodeling and validation of computer codes François Bachoc Department of Statistics and Operations Research, University of Vienna (Former PhD
Introduction to Gaussian-process based Kriging models for metamodeling and validation of computer codes François Bachoc Department of Statistics and Operations Research, University of Vienna (Former PhD
Multi-fidelity sensitivity analysis
 Multi-fidelity sensitivity analysis Loic Le Gratiet 1,2, Claire Cannamela 2 & Bertrand Iooss 3 1 Université Denis-Diderot, Paris, France 2 CEA, DAM, DIF, F-91297 Arpajon, France 3 EDF R&D, 6 quai Watier,
Multi-fidelity sensitivity analysis Loic Le Gratiet 1,2, Claire Cannamela 2 & Bertrand Iooss 3 1 Université Denis-Diderot, Paris, France 2 CEA, DAM, DIF, F-91297 Arpajon, France 3 EDF R&D, 6 quai Watier,
Bayesian sensitivity analysis of a cardiac cell model using a Gaussian process emulator Supporting information
 Bayesian sensitivity analysis of a cardiac cell model using a Gaussian process emulator Supporting information E T Y Chang 1,2, M Strong 3 R H Clayton 1,2, 1 Insigneo Institute for in-silico Medicine,
Bayesian sensitivity analysis of a cardiac cell model using a Gaussian process emulator Supporting information E T Y Chang 1,2, M Strong 3 R H Clayton 1,2, 1 Insigneo Institute for in-silico Medicine,
Optimization of Gaussian Process Hyperparameters using Rprop
 Optimization of Gaussian Process Hyperparameters using Rprop Manuel Blum and Martin Riedmiller University of Freiburg - Department of Computer Science Freiburg, Germany Abstract. Gaussian processes are
Optimization of Gaussian Process Hyperparameters using Rprop Manuel Blum and Martin Riedmiller University of Freiburg - Department of Computer Science Freiburg, Germany Abstract. Gaussian processes are
Monitoring Wafer Geometric Quality using Additive Gaussian Process
 Monitoring Wafer Geometric Quality using Additive Gaussian Process Linmiao Zhang 1 Kaibo Wang 2 Nan Chen 1 1 Department of Industrial and Systems Engineering, National University of Singapore 2 Department
Monitoring Wafer Geometric Quality using Additive Gaussian Process Linmiao Zhang 1 Kaibo Wang 2 Nan Chen 1 1 Department of Industrial and Systems Engineering, National University of Singapore 2 Department
Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes
 Lecture#21 (Monday November 12) Gaussian Processes") Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan 1, M. Koval and P. Parashar 1 Applications of Gaussian
Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan 1, M. Koval and P. Parashar 1 Applications of Gaussian
A Process over all Stationary Covariance Kernels
 A Process over all Stationary Covariance Kernels Andrew Gordon Wilson June 9, 0 Abstract I define a process over all stationary covariance kernels. I show how one might be able to perform inference that
A Process over all Stationary Covariance Kernels Andrew Gordon Wilson June 9, 0 Abstract I define a process over all stationary covariance kernels. I show how one might be able to perform inference that
Machine Learning. Gaussian Mixture Models. Zhiyao Duan & Bryan Pardo, Machine Learning: EECS 349 Fall
 Machine Learning Gaussian Mixture Models Zhiyao Duan & Bryan Pardo, Machine Learning: EECS 349 Fall 2012 1 The Generative Model POV We think of the data as being generated from some process. We assume
Machine Learning Gaussian Mixture Models Zhiyao Duan & Bryan Pardo, Machine Learning: EECS 349 Fall 2012 1 The Generative Model POV We think of the data as being generated from some process. We assume
arxiv: v1 [stat.me] 24 May 2010
![arxiv: v1 [stat.me] 24 May 2010](/thumbs/92/110628453.jpg "arxiv: v1 [stat.me] 24 May 2010") The role of the nugget term in the Gaussian process method Andrey Pepelyshev arxiv:1005.4385v1 [stat.me] 24 May 2010 Abstract The maximum likelihood estimate of the correlation parameter of a Gaussian
The role of the nugget term in the Gaussian process method Andrey Pepelyshev arxiv:1005.4385v1 [stat.me] 24 May 2010 Abstract The maximum likelihood estimate of the correlation parameter of a Gaussian
Gaussian Processes. Le Song. Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012
 Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Sensitivity analysis using the Metamodel of Optimal Prognosis. Lectures. Thomas Most & Johannes Will
 Lectures Sensitivity analysis using the Metamodel of Optimal Prognosis Thomas Most & Johannes Will presented at the Weimar Optimization and Stochastic Days 2011 Source: www.dynardo.de/en/library Sensitivity
Lectures Sensitivity analysis using the Metamodel of Optimal Prognosis Thomas Most & Johannes Will presented at the Weimar Optimization and Stochastic Days 2011 Source: www.dynardo.de/en/library Sensitivity
Model Selection for Gaussian Processes
 Institute for Adaptive and Neural Computation School of Informatics,, UK December 26 Outline GP basics Model selection: covariance functions and parameterizations Criteria for model selection Marginal
Institute for Adaptive and Neural Computation School of Informatics,, UK December 26 Outline GP basics Model selection: covariance functions and parameterizations Criteria for model selection Marginal
Some methods for sensitivity analysis of systems / networks
 Article Some methods for sensitivity analysis of systems / networks WenJun Zhang School of Life Sciences, Sun Yat-sen University, Guangzhou 510275, China; International Academy of Ecology and Environmental
Article Some methods for sensitivity analysis of systems / networks WenJun Zhang School of Life Sciences, Sun Yat-sen University, Guangzhou 510275, China; International Academy of Ecology and Environmental
Gaussian Processes. 1 What problems can be solved by Gaussian Processes?
 Statistical Techniques in Robotics (16-831, F1) Lecture#19 (Wednesday November 16) Gaussian Processes Lecturer: Drew Bagnell Scribe:Yamuna Krishnamurthy 1 1 What problems can be solved by Gaussian Processes?
Statistical Techniques in Robotics (16-831, F1) Lecture#19 (Wednesday November 16) Gaussian Processes Lecturer: Drew Bagnell Scribe:Yamuna Krishnamurthy 1 1 What problems can be solved by Gaussian Processes?
Introduction to Gaussian Processes
 Introduction to Gaussian Processes Neil D. Lawrence GPSS 10th June 2013 Book Rasmussen and Williams (2006) Outline The Gaussian Density Covariance from Basis Functions Basis Function Representations Constructing
Introduction to Gaussian Processes Neil D. Lawrence GPSS 10th June 2013 Book Rasmussen and Williams (2006) Outline The Gaussian Density Covariance from Basis Functions Basis Function Representations Constructing
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
Efficient Resonant Frequency Modeling for Dual-Band Microstrip Antennas by Gaussian Process Regression
 1 Efficient Resonant Frequency Modeling for Dual-Band Microstrip Antennas by Gaussian Process Regression J. P. Jacobs Abstract A methodology based on Gaussian process regression (GPR) for accurately modeling
1 Efficient Resonant Frequency Modeling for Dual-Band Microstrip Antennas by Gaussian Process Regression J. P. Jacobs Abstract A methodology based on Gaussian process regression (GPR) for accurately modeling
COMP 551 Applied Machine Learning Lecture 20: Gaussian processes
 COMP 55 Applied Machine Learning Lecture 2: Gaussian processes Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~hvanho2/comp55
COMP 55 Applied Machine Learning Lecture 2: Gaussian processes Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~hvanho2/comp55
An Introduction to Gaussian Processes for Spatial Data (Predictions!)
") An Introduction to Gaussian Processes for Spatial Data (Predictions!) Matthew Kupilik College of Engineering Seminar Series Nov 216 Matthew Kupilik UAA GP for Spatial Data Nov 216 1 / 35 Why? When evidence
An Introduction to Gaussian Processes for Spatial Data (Predictions!) Matthew Kupilik College of Engineering Seminar Series Nov 216 Matthew Kupilik UAA GP for Spatial Data Nov 216 1 / 35 Why? When evidence
Introduction to Gaussian Process
 Introduction to Gaussian Process CS 778 Chris Tensmeyer CS 478 INTRODUCTION 1 What Topic? Machine Learning Regression Bayesian ML Bayesian Regression Bayesian Non-parametric Gaussian Process (GP) GP Regression
Introduction to Gaussian Process CS 778 Chris Tensmeyer CS 478 INTRODUCTION 1 What Topic? Machine Learning Regression Bayesian ML Bayesian Regression Bayesian Non-parametric Gaussian Process (GP) GP Regression
Sequential Importance Sampling for Rare Event Estimation with Computer Experiments
 Sequential Importance Sampling for Rare Event Estimation with Computer Experiments Brian Williams and Rick Picard LA-UR-12-22467 Statistical Sciences Group, Los Alamos National Laboratory Abstract Importance
Sequential Importance Sampling for Rare Event Estimation with Computer Experiments Brian Williams and Rick Picard LA-UR-12-22467 Statistical Sciences Group, Los Alamos National Laboratory Abstract Importance
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
mlegp: an R package for Gaussian process modeling and sensitivity analysis
 mlegp: an R package for Gaussian process modeling and sensitivity analysis Garrett Dancik January 30, 2018 1 mlegp: an overview Gaussian processes (GPs) are commonly used as surrogate statistical models
mlegp: an R package for Gaussian process modeling and sensitivity analysis Garrett Dancik January 30, 2018 1 mlegp: an overview Gaussian processes (GPs) are commonly used as surrogate statistical models
GAUSSIAN PROCESS REGRESSION
 GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
arxiv: v1 [stat.me] 10 Jul 2009
![arxiv: v1 [stat.me] 10 Jul 2009](/thumbs/94/118745206.jpg "arxiv: v1 [stat.me] 10 Jul 2009") 6th St.Petersburg Workshop on Simulation (2009) 1091-1096 Improvement of random LHD for high dimensions arxiv:0907.1823v1 [stat.me] 10 Jul 2009 Andrey Pepelyshev 1 Abstract Designs of experiments for multivariate
6th St.Petersburg Workshop on Simulation (2009) 1091-1096 Improvement of random LHD for high dimensions arxiv:0907.1823v1 [stat.me] 10 Jul 2009 Andrey Pepelyshev 1 Abstract Designs of experiments for multivariate
An introduction to Bayesian statistics and model calibration and a host of related topics
 An introduction to Bayesian statistics and model calibration and a host of related topics Derek Bingham Statistics and Actuarial Science Simon Fraser University Cast of thousands have participated in the
An introduction to Bayesian statistics and model calibration and a host of related topics Derek Bingham Statistics and Actuarial Science Simon Fraser University Cast of thousands have participated in the
Gaussian Processes in Machine Learning
 Gaussian Processes in Machine Learning November 17, 2011 CharmGil Hong Agenda Motivation GP : How does it make sense? Prior : Defining a GP More about Mean and Covariance Functions Posterior : Conditioning
Gaussian Processes in Machine Learning November 17, 2011 CharmGil Hong Agenda Motivation GP : How does it make sense? Prior : Defining a GP More about Mean and Covariance Functions Posterior : Conditioning
Can you predict the future..?
 Can you predict the future..? Gaussian Process Modelling for Forward Prediction Anna Scaife 1 1 Jodrell Bank Centre for Astrophysics University of Manchester @radastrat September 7, 2017 Anna Scaife University
Can you predict the future..? Gaussian Process Modelling for Forward Prediction Anna Scaife 1 1 Jodrell Bank Centre for Astrophysics University of Manchester @radastrat September 7, 2017 Anna Scaife University
Stat 890 Design of computer experiments
 Stat 890 Design of computer experiments Will introduce design concepts for computer experiments Will look at more elaborate constructions next day Experiment design In computer experiments, as in many
Stat 890 Design of computer experiments Will introduce design concepts for computer experiments Will look at more elaborate constructions next day Experiment design In computer experiments, as in many
Nonparmeteric Bayes & Gaussian Processes. Baback Moghaddam Machine Learning Group
 Nonparmeteric Bayes & Gaussian Processes Baback Moghaddam baback@jpl.nasa.gov Machine Learning Group Outline Bayesian Inference Hierarchical Models Model Selection Parametric vs. Nonparametric Gaussian
Nonparmeteric Bayes & Gaussian Processes Baback Moghaddam baback@jpl.nasa.gov Machine Learning Group Outline Bayesian Inference Hierarchical Models Model Selection Parametric vs. Nonparametric Gaussian
Probabilistic numerics for deep learning
 Presenter: Shijia Wang Department of Engineering Science, University of Oxford rning (RLSS) Summer School, Montreal 2017 Outline 1 Introduction Probabilistic Numerics 2 Components Probabilistic modeling
Presenter: Shijia Wang Department of Engineering Science, University of Oxford rning (RLSS) Summer School, Montreal 2017 Outline 1 Introduction Probabilistic Numerics 2 Components Probabilistic modeling
Lecture 5: GPs and Streaming regression
 Lecture 5: GPs and Streaming regression Gaussian Processes Information gain Confidence intervals COMP-652 and ECSE-608, Lecture 5 - September 19, 2017 1 Recall: Non-parametric regression Input space X
Lecture 5: GPs and Streaming regression Gaussian Processes Information gain Confidence intervals COMP-652 and ECSE-608, Lecture 5 - September 19, 2017 1 Recall: Non-parametric regression Input space X
ADVANCED MACHINE LEARNING ADVANCED MACHINE LEARNING. Non-linear regression techniques Part - II
 1 Non-linear regression techniques Part - II Regression Algorithms in this Course Support Vector Machine Relevance Vector Machine Support vector regression Boosting random projections Relevance vector
1 Non-linear regression techniques Part - II Regression Algorithms in this Course Support Vector Machine Relevance Vector Machine Support vector regression Boosting random projections Relevance vector
Probabilistic Models for Learning Data Representations. Andreas Damianou
 Probabilistic Models for Learning Data Representations Andreas Damianou Department of Computer Science, University of Sheffield, UK IBM Research, Nairobi, Kenya, 23/06/2015 Sheffield SITraN Outline Part
Probabilistic Models for Learning Data Representations Andreas Damianou Department of Computer Science, University of Sheffield, UK IBM Research, Nairobi, Kenya, 23/06/2015 Sheffield SITraN Outline Part
Model Based Clustering of Count Processes Data
 Model Based Clustering of Count Processes Data Tin Lok James Ng, Brendan Murphy Insight Centre for Data Analytics School of Mathematics and Statistics May 15, 2017 Tin Lok James Ng, Brendan Murphy (Insight)
Model Based Clustering of Count Processes Data Tin Lok James Ng, Brendan Murphy Insight Centre for Data Analytics School of Mathematics and Statistics May 15, 2017 Tin Lok James Ng, Brendan Murphy (Insight)
An adaptive kriging method for characterizing uncertainty in inverse problems
 Int Statistical Inst: Proc 58th World Statistical Congress, 2, Dublin Session STS2) p98 An adaptive kriging method for characterizing uncertainty in inverse problems FU Shuai 2 University Paris-Sud & INRIA,
Int Statistical Inst: Proc 58th World Statistical Congress, 2, Dublin Session STS2) p98 An adaptive kriging method for characterizing uncertainty in inverse problems FU Shuai 2 University Paris-Sud & INRIA,
COMP 551 Applied Machine Learning Lecture 21: Bayesian optimisation
 COMP 55 Applied Machine Learning Lecture 2: Bayesian optimisation Associate Instructor: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp55 Unless otherwise noted, all material posted
COMP 55 Applied Machine Learning Lecture 2: Bayesian optimisation Associate Instructor: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp55 Unless otherwise noted, all material posted
Practical Bayesian Optimization of Machine Learning. Learning Algorithms
 Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
One-at-a-Time Designs for Estimating Elementary Effects of Simulator Experiments with Non-rectangular Input Regions
 Statistics and Applications Volume 11, Nos. 1&2, 2013 (New Series), pp. 15-32 One-at-a-Time Designs for Estimating Elementary Effects of Simulator Experiments with Non-rectangular Input Regions Fangfang
Statistics and Applications Volume 11, Nos. 1&2, 2013 (New Series), pp. 15-32 One-at-a-Time Designs for Estimating Elementary Effects of Simulator Experiments with Non-rectangular Input Regions Fangfang
Prediction of double gene knockout measurements
 Prediction of double gene knockout measurements Sofia Kyriazopoulou-Panagiotopoulou sofiakp@stanford.edu December 12, 2008 Abstract One way to get an insight into the potential interaction between a pair
Prediction of double gene knockout measurements Sofia Kyriazopoulou-Panagiotopoulou sofiakp@stanford.edu December 12, 2008 Abstract One way to get an insight into the potential interaction between a pair
Theory and Computation for Gaussian Processes
 University of Chicago IPAM, February 2015 Funders & Collaborators US Department of Energy, US National Science Foundation (STATMOS) Mihai Anitescu, Jie Chen, Ying Sun Gaussian processes A process Z on
University of Chicago IPAM, February 2015 Funders & Collaborators US Department of Energy, US National Science Foundation (STATMOS) Mihai Anitescu, Jie Chen, Ying Sun Gaussian processes A process Z on
Efficient geostatistical simulation for spatial uncertainty propagation
 Efficient geostatistical simulation for spatial uncertainty propagation Stelios Liodakis University of the Aegean University Hill Mytilene, Greece stelioslio@geo.aegean.gr Phaedon Kyriakidis Cyprus University
Efficient geostatistical simulation for spatial uncertainty propagation Stelios Liodakis University of the Aegean University Hill Mytilene, Greece stelioslio@geo.aegean.gr Phaedon Kyriakidis Cyprus University
CSci 8980: Advanced Topics in Graphical Models Gaussian Processes
 CSci 8980: Advanced Topics in Graphical Models Gaussian Processes Instructor: Arindam Banerjee November 15, 2007 Gaussian Processes Outline Gaussian Processes Outline Parametric Bayesian Regression Gaussian
CSci 8980: Advanced Topics in Graphical Models Gaussian Processes Instructor: Arindam Banerjee November 15, 2007 Gaussian Processes Outline Gaussian Processes Outline Parametric Bayesian Regression Gaussian
A Unified Framework for Uncertainty and Sensitivity Analysis of Computational Models with Many Input Parameters
 A Unified Framework for Uncertainty and Sensitivity Analysis of Computational Models with Many Input Parameters C. F. Jeff Wu H. Milton Stewart School of Industrial and Systems Engineering Georgia Institute
A Unified Framework for Uncertainty and Sensitivity Analysis of Computational Models with Many Input Parameters C. F. Jeff Wu H. Milton Stewart School of Industrial and Systems Engineering Georgia Institute
Introduction. Chapter 1
 Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
Uncertainty in energy system models
 Uncertainty in energy system models Amy Wilson Durham University May 2015 Table of Contents 1 Model uncertainty 2 3 Example - generation investment 4 Conclusion Model uncertainty Contents 1 Model uncertainty
Uncertainty in energy system models Amy Wilson Durham University May 2015 Table of Contents 1 Model uncertainty 2 3 Example - generation investment 4 Conclusion Model uncertainty Contents 1 Model uncertainty
Parallel Bayesian Global Optimization, with Application to Metrics Optimization at Yelp
 .. Parallel Bayesian Global Optimization, with Application to Metrics Optimization at Yelp Jialei Wang 1 Peter Frazier 1 Scott Clark 2 Eric Liu 2 1 School of Operations Research & Information Engineering,
.. Parallel Bayesian Global Optimization, with Application to Metrics Optimization at Yelp Jialei Wang 1 Peter Frazier 1 Scott Clark 2 Eric Liu 2 1 School of Operations Research & Information Engineering,
Stochastic Processes, Kernel Regression, Infinite Mixture Models
 Stochastic Processes, Kernel Regression, Infinite Mixture Models Gabriel Huang (TA for Simon Lacoste-Julien) IFT 6269 : Probabilistic Graphical Models - Fall 2018 Stochastic Process = Random Function 2
Stochastic Processes, Kernel Regression, Infinite Mixture Models Gabriel Huang (TA for Simon Lacoste-Julien) IFT 6269 : Probabilistic Graphical Models - Fall 2018 Stochastic Process = Random Function 2
Data-driven Kriging models based on FANOVA-decomposition
 Data-driven Kriging models based on FANOVA-decomposition Thomas Muehlenstaedt, Olivier Roustant, Laurent Carraro, Sonja Kuhnt To cite this version: Thomas Muehlenstaedt, Olivier Roustant, Laurent Carraro,
Data-driven Kriging models based on FANOVA-decomposition Thomas Muehlenstaedt, Olivier Roustant, Laurent Carraro, Sonja Kuhnt To cite this version: Thomas Muehlenstaedt, Olivier Roustant, Laurent Carraro,
Introduction to Statistical Methods for Understanding Prediction Uncertainty in Simulation Models
 LA-UR-04-3632 Introduction to Statistical Methods for Understanding Prediction Uncertainty in Simulation Models Michael D. McKay formerly of the Statistical Sciences Group Los Alamos National Laboratory
LA-UR-04-3632 Introduction to Statistical Methods for Understanding Prediction Uncertainty in Simulation Models Michael D. McKay formerly of the Statistical Sciences Group Los Alamos National Laboratory
Étude de classes de noyaux adaptées à la simplification et à l interprétation des modèles d approximation.
 Étude de classes de noyaux adaptées à la simplification et à l interprétation des modèles d approximation. Soutenance de thèse de N. Durrande Ecole des Mines de St-Etienne, 9 november 2011 Directeurs Laurent
Étude de classes de noyaux adaptées à la simplification et à l interprétation des modèles d approximation. Soutenance de thèse de N. Durrande Ecole des Mines de St-Etienne, 9 november 2011 Directeurs Laurent
Use of Design Sensitivity Information in Response Surface and Kriging Metamodels
 Optimization and Engineering, 2, 469 484, 2001 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Use of Design Sensitivity Information in Response Surface and Kriging Metamodels J. J.
Optimization and Engineering, 2, 469 484, 2001 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Use of Design Sensitivity Information in Response Surface and Kriging Metamodels J. J.
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
Virtual Sensors and Large-Scale Gaussian Processes
 Virtual Sensors and Large-Scale Gaussian Processes Ashok N. Srivastava, Ph.D. Principal Investigator, IVHM Project Group Lead, Intelligent Data Understanding ashok.n.srivastava@nasa.gov Coauthors: Kamalika
Virtual Sensors and Large-Scale Gaussian Processes Ashok N. Srivastava, Ph.D. Principal Investigator, IVHM Project Group Lead, Intelligent Data Understanding ashok.n.srivastava@nasa.gov Coauthors: Kamalika
Iterative Gaussian Process Regression for Potential Energy Surfaces. Matthew Shelley University of York ISNET-5 Workshop 6th November 2017
 Iterative Gaussian Process Regression for Potential Energy Surfaces Matthew Shelley University of York ISNET-5 Workshop 6th November 2017 Outline Motivation: Calculation of potential energy surfaces (PES)
Iterative Gaussian Process Regression for Potential Energy Surfaces Matthew Shelley University of York ISNET-5 Workshop 6th November 2017 Outline Motivation: Calculation of potential energy surfaces (PES)
Lecture: Gaussian Process Regression. STAT 6474 Instructor: Hongxiao Zhu
 Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
Adaptive Sampling of Clouds with a Fleet of UAVs: Improving Gaussian Process Regression by Including Prior Knowledge
 Master s Thesis Presentation Adaptive Sampling of Clouds with a Fleet of UAVs: Improving Gaussian Process Regression by Including Prior Knowledge Diego Selle (RIS @ LAAS-CNRS, RT-TUM) Master s Thesis Presentation
Master s Thesis Presentation Adaptive Sampling of Clouds with a Fleet of UAVs: Improving Gaussian Process Regression by Including Prior Knowledge Diego Selle (RIS @ LAAS-CNRS, RT-TUM) Master s Thesis Presentation
Machine Learning Lecture 2
 Machine Perceptual Learning and Sensory Summer Augmented 15 Computing Many slides adapted from B. Schiele Machine Learning Lecture 2 Probability Density Estimation 16.04.2015 Bastian Leibe RWTH Aachen
Machine Perceptual Learning and Sensory Summer Augmented 15 Computing Many slides adapted from B. Schiele Machine Learning Lecture 2 Probability Density Estimation 16.04.2015 Bastian Leibe RWTH Aachen
Gaussian Process Regression: Active Data Selection and Test Point. Rejection. Sambu Seo Marko Wallat Thore Graepel Klaus Obermayer
 Gaussian Process Regression: Active Data Selection and Test Point Rejection Sambu Seo Marko Wallat Thore Graepel Klaus Obermayer Department of Computer Science, Technical University of Berlin Franklinstr.8,
Gaussian Process Regression: Active Data Selection and Test Point Rejection Sambu Seo Marko Wallat Thore Graepel Klaus Obermayer Department of Computer Science, Technical University of Berlin Franklinstr.8,
BAYESIAN DECISION THEORY
 Last updated: September 17, 2012 BAYESIAN DECISION THEORY Problems 2 The following problems from the textbook are relevant: 2.1 2.9, 2.11, 2.17 For this week, please at least solve Problem 2.3. We will
Last updated: September 17, 2012 BAYESIAN DECISION THEORY Problems 2 The following problems from the textbook are relevant: 2.1 2.9, 2.11, 2.17 For this week, please at least solve Problem 2.3. We will
CS 7140: Advanced Machine Learning
 Instructor CS 714: Advanced Machine Learning Lecture 3: Gaussian Processes (17 Jan, 218) Jan-Willem van de Meent (j.vandemeent@northeastern.edu) Scribes Mo Han (han.m@husky.neu.edu) Guillem Reus Muns (reusmuns.g@husky.neu.edu)
Instructor CS 714: Advanced Machine Learning Lecture 3: Gaussian Processes (17 Jan, 218) Jan-Willem van de Meent (j.vandemeent@northeastern.edu) Scribes Mo Han (han.m@husky.neu.edu) Guillem Reus Muns (reusmuns.g@husky.neu.edu)
Reliability Monitoring Using Log Gaussian Process Regression
 COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
Efficient sensitivity analysis for virtual prototyping. Lectures. Thomas Most & Johannes Will
 Lectures Efficient sensitivity analysis for virtual prototyping Thomas Most & Johannes Will presented at the ECCOMAS Conference 2012 Source: www.dynardo.de/en/library European Congress on Computational
Lectures Efficient sensitivity analysis for virtual prototyping Thomas Most & Johannes Will presented at the ECCOMAS Conference 2012 Source: www.dynardo.de/en/library European Congress on Computational
Introduction to Gaussian Processes
 Introduction to Gaussian Processes Iain Murray murray@cs.toronto.edu CSC255, Introduction to Machine Learning, Fall 28 Dept. Computer Science, University of Toronto The problem Learn scalar function of
Introduction to Gaussian Processes Iain Murray murray@cs.toronto.edu CSC255, Introduction to Machine Learning, Fall 28 Dept. Computer Science, University of Toronto The problem Learn scalar function of
Latin Hypercube Sampling with Multidimensional Uniformity
 Latin Hypercube Sampling with Multidimensional Uniformity Jared L. Deutsch and Clayton V. Deutsch Complex geostatistical models can only be realized a limited number of times due to large computational
Latin Hypercube Sampling with Multidimensional Uniformity Jared L. Deutsch and Clayton V. Deutsch Complex geostatistical models can only be realized a limited number of times due to large computational
Machine Learning. Bayesian Regression & Classification. Marc Toussaint U Stuttgart
 Machine Learning Bayesian Regression & Classification learning as inference, Bayesian Kernel Ridge regression & Gaussian Processes, Bayesian Kernel Logistic Regression & GP classification, Bayesian Neural
Machine Learning Bayesian Regression & Classification learning as inference, Bayesian Kernel Ridge regression & Gaussian Processes, Bayesian Kernel Logistic Regression & GP classification, Bayesian Neural
CSC2541 Lecture 2 Bayesian Occam s Razor and Gaussian Processes
 CSC2541 Lecture 2 Bayesian Occam s Razor and Gaussian Processes Roger Grosse Roger Grosse CSC2541 Lecture 2 Bayesian Occam s Razor and Gaussian Processes 1 / 55 Adminis-Trivia Did everyone get my e-mail
CSC2541 Lecture 2 Bayesian Occam s Razor and Gaussian Processes Roger Grosse Roger Grosse CSC2541 Lecture 2 Bayesian Occam s Razor and Gaussian Processes 1 / 55 Adminis-Trivia Did everyone get my e-mail
Efficiency and Reliability of Bayesian Calibration of Energy Supply System Models
 Efficiency and Reliability of Bayesian Calibration of Energy Supply System Models Kathrin Menberg 1,2, Yeonsook Heo 2, Ruchi Choudhary 1 1 University of Cambridge, Department of Engineering, Cambridge,
Efficiency and Reliability of Bayesian Calibration of Energy Supply System Models Kathrin Menberg 1,2, Yeonsook Heo 2, Ruchi Choudhary 1 1 University of Cambridge, Department of Engineering, Cambridge,
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Lecture 3. Linear Regression II Bastian Leibe RWTH Aachen
 Advanced Machine Learning Lecture 3 Linear Regression II 02.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de This Lecture: Advanced Machine Learning Regression
Advanced Machine Learning Lecture 3 Linear Regression II 02.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de/ leibe@vision.rwth-aachen.de This Lecture: Advanced Machine Learning Regression
New Insights into History Matching via Sequential Monte Carlo
 New Insights into History Matching via Sequential Monte Carlo Associate Professor Chris Drovandi School of Mathematical Sciences ARC Centre of Excellence for Mathematical and Statistical Frontiers (ACEMS)
New Insights into History Matching via Sequential Monte Carlo Associate Professor Chris Drovandi School of Mathematical Sciences ARC Centre of Excellence for Mathematical and Statistical Frontiers (ACEMS)
Creating Non-Gaussian Processes from Gaussian Processes by the Log-Sum-Exp Approach. Radford M. Neal, 28 February 2005
 Creating Non-Gaussian Processes from Gaussian Processes by the Log-Sum-Exp Approach Radford M. Neal, 28 February 2005 A Very Brief Review of Gaussian Processes A Gaussian process is a distribution over
Creating Non-Gaussian Processes from Gaussian Processes by the Log-Sum-Exp Approach Radford M. Neal, 28 February 2005 A Very Brief Review of Gaussian Processes A Gaussian process is a distribution over
Parameter estimation and prediction using Gaussian Processes
 Parameter estimation and prediction using Gaussian Processes Yiannis Andrianakis and Peter G. Challenor August, 9 Abstract This is a report on methods of parameter estimation and prediction for Gaussian
Parameter estimation and prediction using Gaussian Processes Yiannis Andrianakis and Peter G. Challenor August, 9 Abstract This is a report on methods of parameter estimation and prediction for Gaussian
Gaussian Processes (10/16/13)
") STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
CSC321 Lecture 2: Linear Regression
 CSC32 Lecture 2: Linear Regression Roger Grosse Roger Grosse CSC32 Lecture 2: Linear Regression / 26 Overview First learning algorithm of the course: linear regression Task: predict scalar-valued targets,
CSC32 Lecture 2: Linear Regression Roger Grosse Roger Grosse CSC32 Lecture 2: Linear Regression / 26 Overview First learning algorithm of the course: linear regression Task: predict scalar-valued targets,
Finding minimum energy paths using Gaussian process regression
 Finding minimum energy paths using Gaussian process regression Olli-Pekka Koistinen Helsinki Institute for Information Technology HIIT Department of Computer Science, Aalto University Department of Applied
Finding minimum energy paths using Gaussian process regression Olli-Pekka Koistinen Helsinki Institute for Information Technology HIIT Department of Computer Science, Aalto University Department of Applied
Gaussian Process Regression Model in Spatial Logistic Regression
 Journal of Physics: Conference Series PAPER OPEN ACCESS Gaussian Process Regression Model in Spatial Logistic Regression To cite this article: A Sofro and A Oktaviarina 018 J. Phys.: Conf. Ser. 947 01005
Journal of Physics: Conference Series PAPER OPEN ACCESS Gaussian Process Regression Model in Spatial Logistic Regression To cite this article: A Sofro and A Oktaviarina 018 J. Phys.: Conf. Ser. 947 01005
COMS 4721: Machine Learning for Data Science Lecture 10, 2/21/2017
 COMS 4721: Machine Learning for Data Science Lecture 10, 2/21/2017 Prof. John Paisley Department of Electrical Engineering & Data Science Institute Columbia University FEATURE EXPANSIONS FEATURE EXPANSIONS
COMS 4721: Machine Learning for Data Science Lecture 10, 2/21/2017 Prof. John Paisley Department of Electrical Engineering & Data Science Institute Columbia University FEATURE EXPANSIONS FEATURE EXPANSIONS
System identification and control with (deep) Gaussian processes. Andreas Damianou
 Gaussian processes. Andreas Damianou") System identification and control with (deep) Gaussian processes Andreas Damianou Department of Computer Science, University of Sheffield, UK MIT, 11 Feb. 2016 Outline Part 1: Introduction Part 2: Gaussian
System identification and control with (deep) Gaussian processes Andreas Damianou Department of Computer Science, University of Sheffield, UK MIT, 11 Feb. 2016 Outline Part 1: Introduction Part 2: Gaussian
Derivative observations in Gaussian Process models of dynamic systems
 Appeared in Advances in Neural Information Processing Systems 6, Vancouver, Canada. Derivative observations in Gaussian Process models of dynamic systems E. Solak Dept. Elec. & Electr. Eng., Strathclyde
Appeared in Advances in Neural Information Processing Systems 6, Vancouver, Canada. Derivative observations in Gaussian Process models of dynamic systems E. Solak Dept. Elec. & Electr. Eng., Strathclyde
Context-Dependent Bayesian Optimization in Real-Time Optimal Control: A Case Study in Airborne Wind Energy Systems
 Context-Dependent Bayesian Optimization in Real-Time Optimal Control: A Case Study in Airborne Wind Energy Systems Ali Baheri Department of Mechanical Engineering University of North Carolina at Charlotte
Context-Dependent Bayesian Optimization in Real-Time Optimal Control: A Case Study in Airborne Wind Energy Systems Ali Baheri Department of Mechanical Engineering University of North Carolina at Charlotte