ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
|
|
|
- Sara Garrett
- 5 years ago
- Views:
Transcription
1 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino
2 Kinematic Functions
3 Kinematic functions Kinematics deals with the study of four functions(called kinematic functions or KFs) that mathematically transform joint variables into cartesian variables and vice versa 1. Direct Position KF: from joint space variables to task space pose 2. Inverse Position KF: from task space pose to joint space variables 3. Direct Velocity KF: from joint space velocities to task space velocities 4. Inverse VelocityKF: from task space velocities to joint space velocities Remember: pose is the name given to the parameters identifying the position and the orientation of a rigid body A geometrical point has no pose, but only position 3
4 Kinematic functions Direct Position KF: from joint space variables to task space pose This is the pose "vector" p = [ p p p α α α] x y z Inverse Position KF: from task space pose to joint space variables 4
5 Kinematic functions Direct Velocity KF: from joint space velocities to task space velocities Inverse Velocity KF: from task space velocities to joint space velocities 5



6 Kinematic functions Positions and velocities of what? It can be the position or velocity of any point of the robot, but, usually, is the position and velocity of the TCP RF TCP R P BASE R 0? How to compute the homogeneous transformation between these two RF 6
7 Kinematic functions: how to compute them The first step is to fix a reference frame (RF) on each robot arm In general, to move from a RF to the following RF, 6 parameters (three translations of the RF origin + three angles for the RF rotation) are required A number of conventionswere introduced to reducethe number of parameters and to find a common wayto describe the relative position of reference frames Denavit-Hartenbergconventions were introduced in 1955 and are still widely used in industry (with some minor modifications) 7
8 Denavit-Hartenberg conventions The convention defines only 4 parameters between two successive RF, instead of the usual 6, because two constraints are added Joints can be prismatic (P) or revolute (R); the convention is valid in both cases 2 parameters are associated with a translation, 2 parameters are associated with a rotation Three of these parameters depend on the robot geometry only, and therefore are constant in time One parameter depends on the relative motion between two successive links, and therefore is a function of time We call this parameter the i-thjoint variable 8
, one toward the TCP (distal) RF 1 Base RF")
9 DH convention Assume a connected multibody system with n rigid links The links may not be necessarily symmetric Each link is connected to two joints, one toward the base (proximal), one toward the TCP (distal) RF 1 Base RF 9



10 DH convention Joint 5 Joint 4 Link 3 Joint 6 Joint 3 Link 2 Wrist Link 1 Joint 2 Shoulder Joint 1 Link 0 = base 10
11 DH convention g i + 1 b i + 1 g i + 2 g i bi 1 b i 11
12 DH convention d 1 θ() t q() t
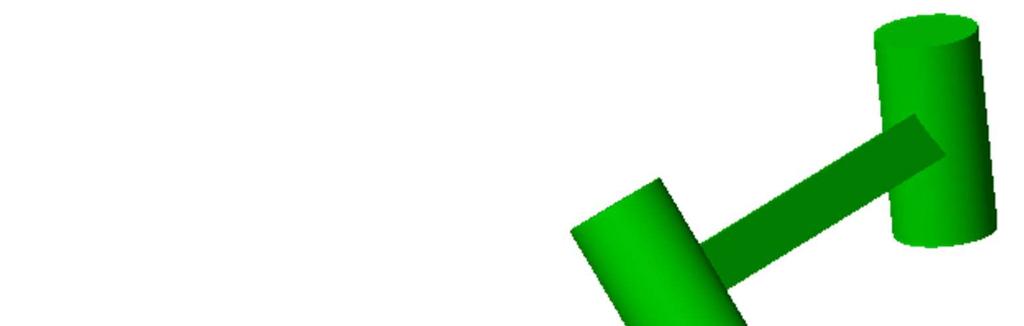
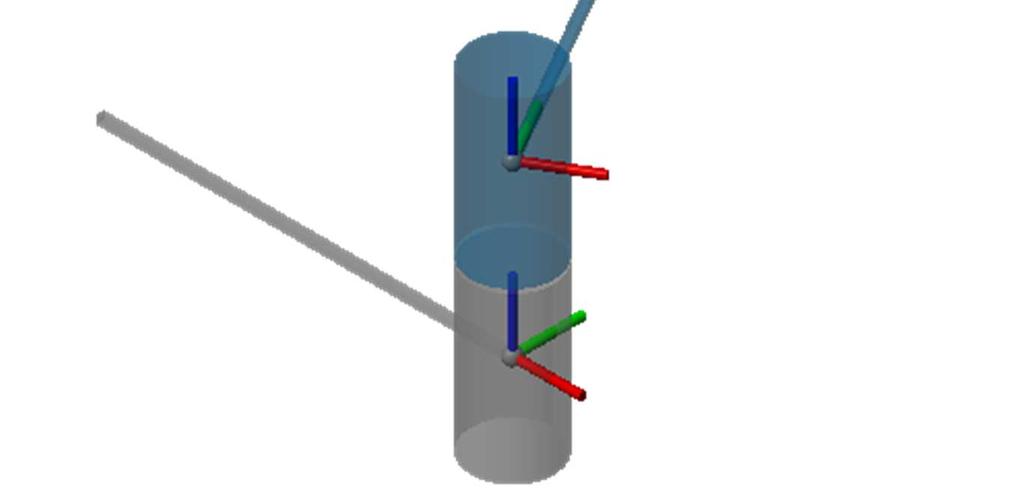
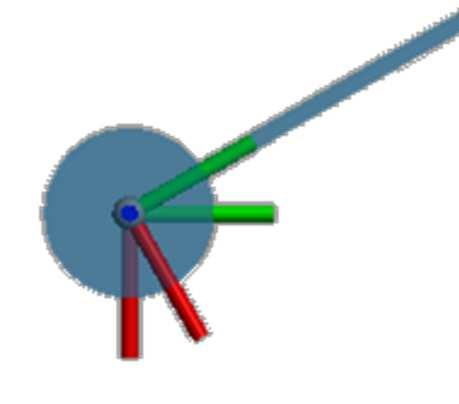
13 DH conventions Rotation of joint 1 only 13

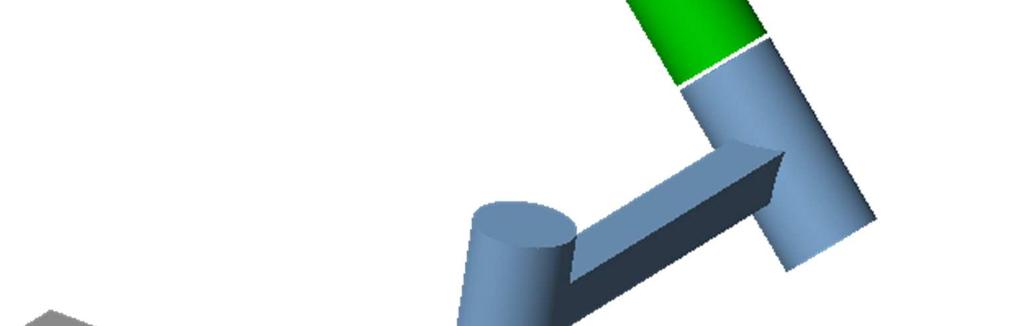
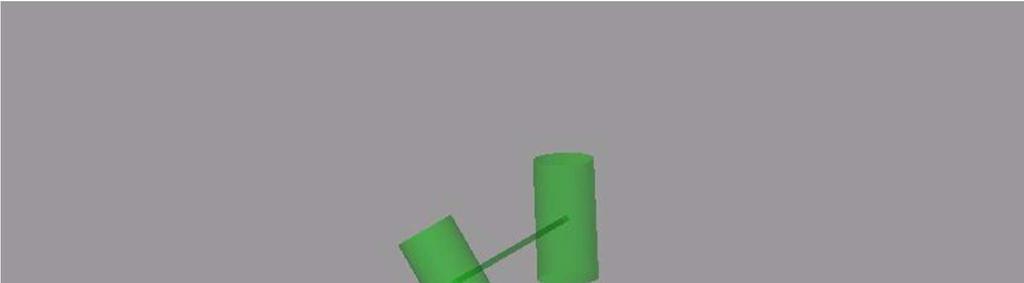
14 DH conventions Rotation of joint 2 only 14

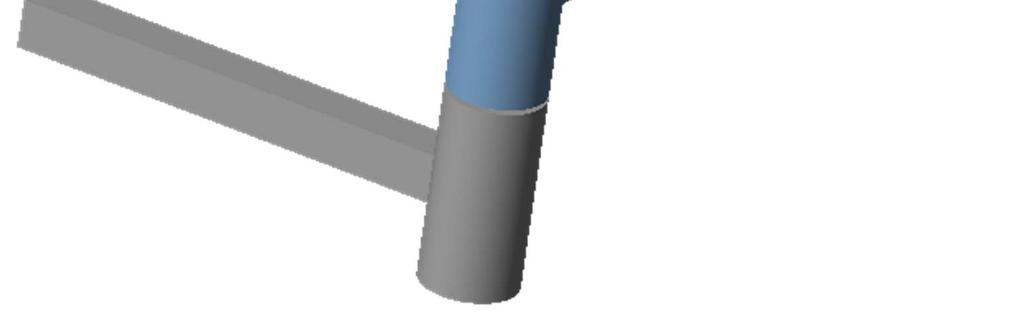
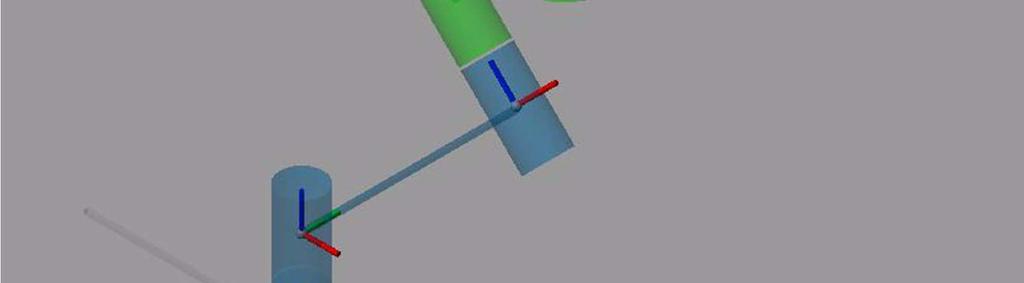
15 DH conventions Rotation of both joints 15
16 DH convention We use the term motion axis to include both revolute and prismatic axes Motion axis Motion axis g i + 1 Motion axis bi gi b i + 1 g i + 2 Base bi 1 symbols b = i g = i arm/link joint We have this sequence b i + 2 TCP 16
17 DH convention 17

18 DH convention Motion axis Motion axis g i +1 g g i + 2 i Motion axis 18

19 DH convention Motion axis g i Motion axis g i +1 Motion axis g i +2 π / 2 π / 2 19
20 DH convention Motion axis g i Motion axis g i +1 Motion axis g i +2 20

21 DH convention Motion axis g i Motion axis g i +1 Motion axis g i +2 21

22 DH convention Motion axis g i Motion axis g i +1 Motion axis g i +2 22


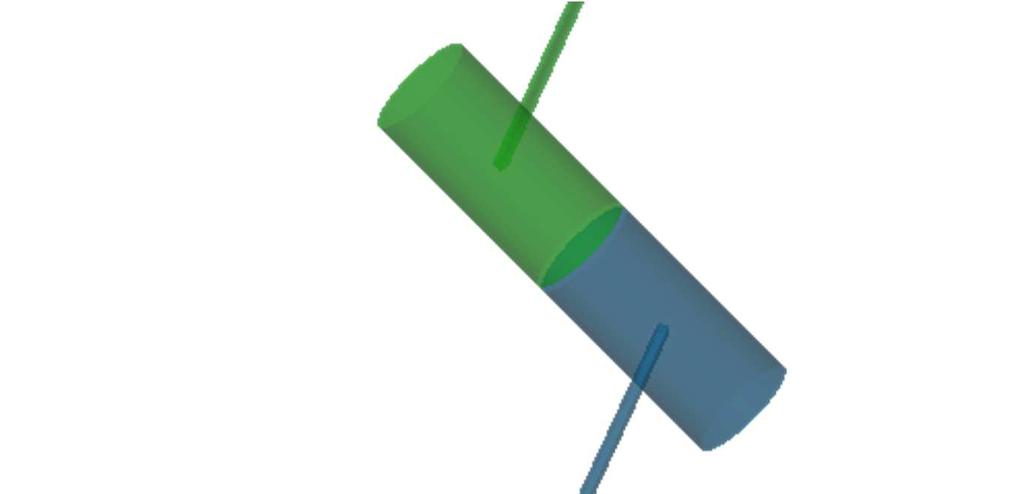
23 DH convention Motion axis g i Motion axis g i +1 Motion axis g i +2 Notice that the origin is not ON g i+1 23
24 DH rules 24
25 DH rules 25
26 DH rules 26

27 Video

28 Video
29 DH parameters DH parameters define the transformation R i 1 R i Depending on the joint type g i Prismatic joint Rotation joint () q () t d t i θ, a, α =fixed i i i i Joint variables Geometrical parameters obtained by calibration () q () t θ t i d, a, α =fixed i i i i 29
30 DH homogeneous roto-translation matrix T TRt R t 0 1 = (,) = T From one reference frame to the next we apply the "pre-post" rule T Trasl(, k )Rot(, k )Trasl(, i )Rot(, iα) i 1 = d θ a i T i 1 i cosθ sinθcosα sinθsinα acosθ i i i i i i i sinθ cosθcosα cosθsinα a sinθ i i i i i i i = 0 sinα cosα d i i i
31 Alternatives to the DH parameters The DH approach is the most common approach to forward kinematics, but it is only one among other conventions. Indeed DH does not handle parallel z-axes very well, and present other drawback when estimating the associated parameters There are various alternatives, including Screw Theory Hayati-Roberts Dual quaternions Although these may (or may not) be better approaches, most of the kinematic libraries accept the DH parameters, and for that reason it is the approach to be considered as first choice. 31
32 Example PUMA robot 32

33 Example PUMA robot 33
34 34
35 Example PUMA robot d = D θ a = q() t = 0 α = 90 k 1 R 1 g 2 g 1 i 1 D 1 k 0 R 0 i 0 35
36 Example PUMA robot D 2 g 2 A 2 g 3 d = D θ a = A α = q() t = 0 k 1 g 1 R 1 i 1 k 2 R 2 i 2 36
37 Example PUMA robot g 3 d = D θ a α 3 = q() t = 0 = 90 R 3 k 2 R 2 i 2 k 3 D 3 R 3 g 4 i 3 37
38 Example PUMA robot From above Lateral view 1 Lateral view 2 38
39 Step-by-step procedure to compute the KF 1 1. Select and numbers joints and links from the base to the TCP 2. Define and place the RF using DH conventions 3. Define the constant DH parameters 4. Define the variable DH parameters generalized coordinate 5. Compute each homogeneous transformation 6. Compute the total 0 T TCP 7. Extract the direct position KF from 8. Compute the inverse position KF 9. Take care of the following problems i 1 i Inverse velocity KF: analytical or geometrical approach Inverse velocity KF: kinematic singularity problem T 39
 t q() t 2 q() t 5 q() t 6 q() t 1 R P TCP BASE R 0 0 T P 0 0 0 () () q () q T q = R t P")
40 Step-by-step procedure to compute the KF 2 1. Select and identify links and joints 2. Set all RFs using DH conventions 3. Define constant geometrical parameters q 4() t q() t 2 q() t 5 q() t 6 q() t 1 R P TCP BASE R 0 0 T P () () q () q T q = R t P P P T
41 Joint and cartesian variables Joint variables Task/cartesian variables/pose q() t q1() t q2() t q3() t q4() t q5() t q6() t = p() t x1() t x2() t x3() t α1() t α2() t α3() t = position orientation Direct KF ( t ) p() t = f q() Inverse KF q f p ( t ) 1 () t = () 41
42 Direct position KF 1 position q1() t p1() t q2() t p2() t q (()) 3() t p3() t t x q q() t = (()) t q4() t pq = p4() t = q (()) 5() t p5() t t α q q6() t p6() t orientation P P P 1 ( q1) 2( q2) 3( q3) 4( q4) 5 ( q5) 6( q6) R t T = T T T T T T T P = 1 0 T orientation position R = R ( q ()) t = t ( q() ) P P t P P t 42
43 Direct position KF 2 T 0 P 0 0 RP tp = 1 0 T Direct cartesian position KF: easy x x x x t t tp t2 3 3 Direct cartesian orientation KF: not so easy to compute, but not difficult We will solve the problem in the following slides 43
44 Direct position KF 3 (() t) α( q() t) Rq We want to compute angles from the rotation matrix. But it is important to decide the representation to use α ( q() t ) What is? Euler angles RPY angles Quaternions Axis-angle representation 44
45 q (t ) 1 q (t ) 2 x q (t ) ) ( q (t ) p (t ) = f (q (t )) = q (t ) = 3 q 4 (t ) α (q (t )) q 5 (t ) q 6 (t ) The inverse KF is important, since control actions are applied to the joint motors, Inverse position KF 1 while the task to be done is defined in Cartesian space q 3 (t ) Trajectory in space q2 (t ) x q (t ) ) ( α (q (t )) q1(t ) 45
 Use symbolic manipulation programs (computer algebra")
46 Inverse position KF 2 1. The problem is complex and there is no clear recipe to solve it 2. If a spherical wrist is present, then a solution is guaranteed, but we must find it... how? 3. There are several possibilities Use brute force or previous known solutions found for similar chains Use inverse velocity KF (recursive approach) Use symbolic manipulation programs (computer algebra systems as Mathematica, Maple, Maxima,, Lisp) NOT SUGGESTED Iteratively compute an approximated numerical expression for the nonlinear equation (Newton method or others) () t = (() t) ( t) = { pt f( qt) } p f q p() t f q() 0 min () () 46
47 Direct velocity KF 1 Linear and angular direct velocity KF Non redundant robot with 6 DOF q() t p() t ɺ1 ɺ1 q() t p() t ɺ 2 ɺ 2 x q q q() t p() t ɺ ɺ ɺ ɺ q() t p() t ɺ 4 ɺ 4 α q() t p() t ɺ ɺ5 ɺ 5 q() t p() t ɺ6 ɺ6 ((), t () t) 3 3 ɺ() t = pɺ() t = = q ( q(), t qɺ() t) Linear velocity vq q ω ((), t ɺ() t) ( q(), t qɺ() t) Derivative of the angles Angular velocity 47
48 Direct velocity KF 2 A brief review of mathematical notations General rule d pq (()) t dt d (() t) x q dt = d (() t) αq dt d d d ( q ()) = f( q(), t, q(), t, q() t) f t i i 1 j n t dt f i f i f i = j q q q 1 j n qɺ () t qɺ () t qɺ () t n 48
49 Direct velocity KF 3 qɺ () t 1 d f f f (()) i i i f t q() t T q = (() t) () t i j fi dt = q q q ɺ J q qɺ 1 j n q () t ɺn f f f q q q JACOBIAN 1 j n q() t ɺ1 d f f f (()) i i i f qt = q() t (() t) () t j dt q q q ɺ = J q qɺ 1 j n q() t n f f f ɺ m m m q q q 1 j n 49
50 Further notes on the Jacobians Velocity kinematics is characterized by Jacobians There are two types of Jacobians: Geometric Jacobian Analytical Jacobian The first one is related to Geometric Velocities J g J a v p ( ) pɺ() t = J q() t qɺ() t also called Task Jacobian xɺ = = Jqɺ g ω The second one is related to Analytical Velocities pɺ xɺ = = ɺα Jqɺ a 50
51 Geometrical and Analytical velocities What is the difference between these two angular velocities? On the contrary, linear velocities do not have this problem: analytical and geometric velocities are the same vector, that can be integrated to give the cartesian position 51
52 Further notes on the Jacobians Moreover it is important to remember that in general no vector u() t exists that is the integral of ωt ()? u() t ω() t The exact relation between the two quantities is: ( ) ( ) ω() t = θɺ() tu() t + sin θ() tuɺ() t + 1 cos θ() t S u() t uɺ() t While it is possible to integrate when is considered ɺ( τ) () t pɺ( τ)dτ= dτ = ( τ) () t ɺα α x x 52
53 Further notes on the Jacobians The geometric Jacobian is adopted every time the physical interpretation of the rotation velocity is needed The analytical Jacobian is adopted every time it is necessary to treat differential quantities in the task space Then, if one wants to implement recursive formula for the joint position q( t ) = q( t) + qɺ( t) t k+ 1 k k he can use or q 1 ( ) = q( ) + J (( q )) v( ) k+ 1 k g k p k t t t t t q 1 ( ) = ( ) + (( )) ( ) k+ 1 k a k k t qt J qt pɺ t t 53
54 Further notes on the Jacobians Reference 54
55 Geometric Jacobian 1 The geometric Jacobian can be constructed taking into account the following steps a) Every link has a reference frame defined according to DH conventions R i R i b) The position of the origin of is given by: g i g i + 1 R i 1 b i i 1 ri 1, i R i x i 1 x i This is known R 0 x = x + R r = x + r 0 i 1 i i 1 i 1 i 1, i i 1 i 1, i 55
56 Geometric Jacobian 2 Derivation with respect to time gives xɺ = xɺ + R rɺ + ω R r 0 i 1 0 i 1 i i 1 i 1 i 1, i i 1 i 1 i 1, i = xɺ + v + ω r i 1 i 1, i i 1 i 1, i Linear velocity of R wrt R Angular velocity of R i i 1 i 1 Remember: Rɺ = S( ω) R= ω R 56
57 Geometric Jacobian 3 If we derive the composition of two rotations, we have: R = R R Rɺ Rɺ R R R 0 0 i 1 i i 1 i 0 0 i 1 0 i 1 = + ɺ i i 1 i i 1 i 0 i 1 0 i 1 = S( ω ) R R + R S( ω ) R i 1 i 1 i i 1 i 1, i i 0 i i 1 = S( ω ) R R + SR ( ω ) R R i 1 i 1 i i 1 i 1, i i 1 i = ( ω ) ( ω ) S + SR R S( ω) R i 1 i 1 i 1, i i i i Hence: 0 ω = ω +R i i 1 i 1 i 1, i angular velocity of RF i in RF 0 angular velocity of RF i wrt RF i-1 in RF i-1 ω angular velocity of RF i-1 in RF 0 57
58 Geometric Jacobian 4 To compute the Geometric Jacobian, one can decompose the Jacobian matrix as: q LINEAR JACOBIAN ɺ 1 q xɺ L,1 L,2 Ln, 2 3 ( ) J J J ɺ v= = J qqɺ =, g J J R Li, Ai, ω J J J A,1 A,2 An, ANGULAR JACOBIAN q ɺ n J indicates how qɺ contributes to the linear velocity of the TCP Li, i n n dx xɺ = qɺ = J qɺ dq i i= 1 i i= 1 Li, i J A,1 indicates how qɺ contributes to the angular velocity of the TCP i n ω= ω = i 1, i Ai, i i= 1 i= 1 n J qɺ 58
59 Structure of the Jacobian LINEAR JACOBIAN ANGULAR JACOBIAN 59
60 Geometric Jacobian 5 If the joint is prismatic J qɺ = k dɺ ω Li, i i 1 i i 1, i = 0 J = k Li, i 1 J = 0 Ai, R i 1 x i 1 r i 1,TCP R TCP If the joint is revolute J qɺ = ω r = ( k r ) θɺ Li, i i 1, i i 1, TCP i 1 i 1, TCP i ω = k θɺ i 1, i i 1 i J = k r Li, i 1 i 1,TCP J = k Ai, i 1 R 0 x TCP All vectors are expresses in r R ( x x ) is the vector that represents in i 1, TCP TCP i R 60
61 Geometric Jacobian 5 In conclusions, the elements of the geometric Jacobian can be computed as follows: Prismatic Revolute J Li, Ai, i 1 J k 0 k r k i 1 i 1, TCP i 1 61
62 Analytical Jacobian 1 Analytical Jacobian is computed deriving the expression of the TCP pose p(()) t p(()) t q q 1 1 p d (()) t q 1 q q ɺ xq 1 n ɺ 1 dt pɺ = = = d (()) t αq pɺ (()) (()) 6 dt p qt p qt q 6 6 ɺ n q q 1 n J(()) qt a 62
63 Analytical Jacobian 2 The first three lines of the analytical Jacobian are equal to the same lines of the geometric Jacobian The last three lines are usually different from the same lines of the geometric Jacobian These can be computed only when the angle representation has been chosen: here we consider only Euler and RPY angles A transformation matrix relates the analytical and geometric velocities, and the two Jacobians ω=t( ααɺ ) () I 0 J q = () g a ( ) J q 0 Tα 63
64 Relations between Jacobians Euler angles α= { φθψ,, } RPYangles α= { θ, θ, θ} x y z 0 cosφ sinφsinθ T( α) = 0 sinφ cosφsinθ E 1 0 cosθ cosθ cosθ sinθ 0 y z z T ( α) = cosθ sinθ cosθ 0 RPY y z z sinθ 0 1 y The values of α that zeros the matrix T(α) determinant correspond to a orientation representation singularity This means that there are geometric angular velocities that cannot be expressed by joint velocities 64


65 Structure of the Jacobian If the robot is non-redundant, the Jacobian matrix is square If the robot is redundant, the Jacobian matrix is rectangular 65
66 Inverse velocity KF 1 When the Jacobian is a square full-rank matrix, the inverse velocity kinematic function is simply obtained as: ( ) qɺ J q pɺ 1 () t = () t () t When the Jacobian is a rectangular full-rank matrix (i.e., when the robotic arm is redundant, but not singular), the inverse velocity kinematic function has infinite solutions, but the (right) pseudo-inversecan be usedto compute one of them ( ) + qɺ() t = J q() t pɺ() t def + T T 1 J = J ( JJ ) 66
67 Inverse velocity KF 2 If the initial joint vector q(0) is known, inverse velocity can be used to solve the inverse position kinematics as an integral t = + ɺ τ τ + ɺ 0 k + 1 k k q () t q (0) q ( )d q ( t ) q ( t ) q ( t ) t Continuous time Discrete time Assuming that t is small 67
68 Inverse velocity KF 3 If the Jacobian (square or rectangular) is NOT full rank, it is not possible to invert or pseudo invert the matrix using the rule J = J ( JJ ) + T T 1 The solution is given using the Singular Value Decomposition of the Jacobian J= UΣV T and computing the pseudo inverse as + + J = VΣ U T Where + is formed by replacing the non-zero diagonal elements of by its reciprocal 68
69 Singularity 1 A square matrix is invertible if ( ) det J q() t 0 When det J ( q () t ) = 0 S a singularity exists at q () t S This is called a singular/singularity configuration 69
70 Singularity 2 For an articulated/anthropomorphic robot threesingularity conditions exist A. completely extended or folded arm B. wrist center on the vertical C. wrist singularity When joint coordinates approach singularity the joint velocities become very large for small cartesian velocities qɺ = J ( qp ) ɺ= Jpɺ Jpɺ detj ε 70
71 Singularity 3 A. Extended arm The velocities span a dim-2 space (the plane) The velocities span a dim-1 space (the tangent line) i.e., singularity 71


72 Singularity 4 B. Wrist center on the vertical these velocities cannot be obtained with infinitesimal joint rotations 72



73 Singularity 5 C. Wrist singularity Euler wrist RPY wrist Singularity=two axes are aligned Singularity=two axes are aligned 73
74 Euler wrist singularity 3 angles Let us start from the symbolic matrix cc scs cs scc ss φ ψ φ θ ψ φ ψ φ θ ψ φ θ sc + ccs ss + ccc cs φ ψ φ θ ψ φ ψ φ θ ψ φ θ ss cs c ψ θ ψ θ θ cos( φ+ ψ) sin( φ+ ψ) Observe that if = 1 θ= 0 c θ we have cc ss cs sc 0 φ ψ φ ψ φ ψ φ ψ sc cs cc ss 0 + φ ψ φ ψ φ ψ φ ψ angle only 74
75 RPY wrist singularity (from MSMS course) 75
76 Singularity In practice, when the joints are neara singular configuration, to follow a finite cartesian velocity the joint velocities become excessively large Near singularity conditions it is not possible to follow a geometric path and at the same time a given velocity profile; it is necessary to reduce the cartesian velocity and follow the path, or to follow the velocity profile, but follow an approximated path In exact singularity conditions, nothing can be done. So Avoid singularity 76
77 Conclusions Kinematic functions can be computed once the DH conventions are applied Inverse position KF is complex Difference between analytical and geometric Jacobians Inverse velocity can be computed except from singularity points Avoid singularities 77

78 From Robohub web site How to calculate forward kinematics in 5 easy steps 78
Differential Kinematics
 Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Kinematics. Basilio Bona. October DAUIN - Politecnico di Torino. Basilio Bona (DAUIN - Politecnico di Torino) Kinematics October / 15
 Kinematics October / 15") Kinematics Basilio Bona DAUIN - Politecnico di Torino October 2013 Basilio Bona (DAUIN - Politecnico di Torino) Kinematics October 2013 1 / 15 Introduction The kinematic quantities used are: position r,
Kinematics Basilio Bona DAUIN - Politecnico di Torino October 2013 Basilio Bona (DAUIN - Politecnico di Torino) Kinematics October 2013 1 / 15 Introduction The kinematic quantities used are: position r,
Kinematics. Basilio Bona. Semester 1, DAUIN Politecnico di Torino. B. Bona (DAUIN) Kinematics Semester 1, / 15
 Kinematics Semester 1, / 15") Kinematics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Kinematics Semester 1, 2014-15 1 / 15 Introduction The kinematic quantities used are: position r, linear velocity
Kinematics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Kinematics Semester 1, 2014-15 1 / 15 Introduction The kinematic quantities used are: position r, linear velocity
Kinematics and kinematic functions
 ROBOTICS 01PEEQW Basilio Bona DAUIN Poliecnico di Torino Kinemaic funcions Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions(called kinemaic funcions or KFs) ha mahemaically
ROBOTICS 01PEEQW Basilio Bona DAUIN Poliecnico di Torino Kinemaic funcions Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions(called kinemaic funcions or KFs) ha mahemaically
Position and orientation of rigid bodies
 Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Kinematics. Basilio Bona. Semester 1, DAUIN Politecnico di Torino. B. Bona (DAUIN) Kinematics Semester 1, / 15
 Kinematics Semester 1, / 15") Kinematics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Kinematics Semester 1, 2016-17 1 / 15 Introduction The kinematic quantities used to represent a body frame are: position
Kinematics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Kinematics Semester 1, 2016-17 1 / 15 Introduction The kinematic quantities used to represent a body frame are: position
DIFFERENTIAL KINEMATICS. Geometric Jacobian. Analytical Jacobian. Kinematic singularities. Kinematic redundancy. Inverse differential kinematics
 DIFFERENTIAL KINEMATICS relationship between joint velocities and end-effector velocities Geometric Jacobian Analytical Jacobian Kinematic singularities Kinematic redundancy Inverse differential kinematics
DIFFERENTIAL KINEMATICS relationship between joint velocities and end-effector velocities Geometric Jacobian Analytical Jacobian Kinematic singularities Kinematic redundancy Inverse differential kinematics
8 Velocity Kinematics
 8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
MEAM 520. More Velocity Kinematics
 MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
Robotics I. Classroom Test November 21, 2014
 Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Dynamics. Basilio Bona. Semester 1, DAUIN Politecnico di Torino. B. Bona (DAUIN) Dynamics Semester 1, / 18
 Dynamics Semester 1, / 18") Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Basilio Bona ROBOTICA 03CFIOR 1
 Indusrial Robos Kinemaics 1 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables
Indusrial Robos Kinemaics 1 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
The Jacobian. Jesse van den Kieboom
 The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
Robotics I. February 6, 2014
 Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
Generalized coordinates and constraints
 Generalized coordinates and constraints Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Generalized coordinates and constraints Semester 1, 2014-15 1 / 25 Coordinates A rigid
Generalized coordinates and constraints Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Generalized coordinates and constraints Semester 1, 2014-15 1 / 25 Coordinates A rigid
Kinematics and kinematic functions
 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables and vice versa Direc Posiion
Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables and vice versa Direc Posiion
Kinematics of a UR5. Rasmus Skovgaard Andersen Aalborg University
 Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
Robotics & Automation. Lecture 17. Manipulability Ellipsoid, Singularities of Serial Arm. John T. Wen. October 14, 2008
 Robotics & Automation Lecture 17 Manipulability Ellipsoid, Singularities of Serial Arm John T. Wen October 14, 2008 Jacobian Singularity rank(j) = dimension of manipulability ellipsoid = # of independent
Robotics & Automation Lecture 17 Manipulability Ellipsoid, Singularities of Serial Arm John T. Wen October 14, 2008 Jacobian Singularity rank(j) = dimension of manipulability ellipsoid = # of independent
Nonholonomic Constraints Examples
 Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Analytical and Numerical Methods Used in Studying the Spatial kinematics of Multi-body Systems. Bernard Roth Stanford University
 Analytical and Numerical Methods Used in Studying the Spatial kinematics of Multi-body Systems Bernard Roth Stanford University Closed Loop Bound on number of solutions=2 6 =64 Open chain constraint
Analytical and Numerical Methods Used in Studying the Spatial kinematics of Multi-body Systems Bernard Roth Stanford University Closed Loop Bound on number of solutions=2 6 =64 Open chain constraint
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Ridig Body Motion Homogeneous Transformations
 Ridig Body Motion Homogeneous Transformations Claudio Melchiorri Dipartimento di Elettronica, Informatica e Sistemistica (DEIS) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEIS)
Ridig Body Motion Homogeneous Transformations Claudio Melchiorri Dipartimento di Elettronica, Informatica e Sistemistica (DEIS) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEIS)
DYNAMICS OF PARALLEL MANIPULATOR
 DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators. Velocity Kinematics
 Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Advanced Robotic Manipulation
 Lecture Notes (CS327A) Advanced Robotic Manipulation Oussama Khatib Stanford University Spring 2005 ii c 2005 by Oussama Khatib Contents 1 Spatial Descriptions 1 1.1 Rigid Body Configuration.................
Lecture Notes (CS327A) Advanced Robotic Manipulation Oussama Khatib Stanford University Spring 2005 ii c 2005 by Oussama Khatib Contents 1 Spatial Descriptions 1 1.1 Rigid Body Configuration.................
Numerical Methods for Inverse Kinematics
 Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Homogeneous Coordinates
 Homogeneous Coordinates Basilio Bona DAUIN-Politecnico di Torino October 2013 Basilio Bona (DAUIN-Politecnico di Torino) Homogeneous Coordinates October 2013 1 / 32 Introduction Homogeneous coordinates
Homogeneous Coordinates Basilio Bona DAUIN-Politecnico di Torino October 2013 Basilio Bona (DAUIN-Politecnico di Torino) Homogeneous Coordinates October 2013 1 / 32 Introduction Homogeneous coordinates
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Lecture «Robot Dynamics» : Kinematics 3
 Lecture «Robot Dynamics» : Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15-12:00, every week exercise: HG G1 Wednesday 8:15-10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics» : Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15-12:00, every week exercise: HG G1 Wednesday 8:15-10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture 7: Kinematics: Velocity Kinematics - the Jacobian
 Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian c Anton Shiriaev. 5EL158: Lecture 7 p. 1/?? Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian
Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian c Anton Shiriaev. 5EL158: Lecture 7 p. 1/?? Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Minimal representations of orientation
 Robotics 1 Minimal representations of orientation (Euler and roll-pitch-yaw angles) Homogeneous transformations Prof. lessandro De Luca Robotics 1 1 Minimal representations rotation matrices: 9 elements
Robotics 1 Minimal representations of orientation (Euler and roll-pitch-yaw angles) Homogeneous transformations Prof. lessandro De Luca Robotics 1 1 Minimal representations rotation matrices: 9 elements
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS
 ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
RECURSIVE INVERSE DYNAMICS
 We assume at the outset that the manipulator under study is of the serial type with n+1 links including the base link and n joints of either the revolute or the prismatic type. The underlying algorithm
We assume at the outset that the manipulator under study is of the serial type with n+1 links including the base link and n joints of either the revolute or the prismatic type. The underlying algorithm
Example: RR Robot. Illustrate the column vector of the Jacobian in the space at the end-effector point.
 Forward kinematics: X e = c 1 + c 12 Y e = s 1 + s 12 = s 1 s 12 c 1 + c 12, = s 12 c 12 Illustrate the column vector of the Jacobian in the space at the end-effector point. points in the direction perpendicular
Forward kinematics: X e = c 1 + c 12 Y e = s 1 + s 12 = s 1 s 12 c 1 + c 12, = s 12 c 12 Illustrate the column vector of the Jacobian in the space at the end-effector point. points in the direction perpendicular
ME 115(b): Homework #2 Solution. Part (b): Using the Product of Exponentials approach, the structure equations take the form:
: Homework #2 Solution. Part (b): Using the Product of Exponentials approach, the structure equations take the form:") ME 5(b): Homework #2 Solution Problem : Problem 2 (d,e), Chapter 3 of MLS. Let s review some material from the parts (b) of this problem: Part (b): Using the Product of Exponentials approach, the structure
ME 5(b): Homework #2 Solution Problem : Problem 2 (d,e), Chapter 3 of MLS. Let s review some material from the parts (b) of this problem: Part (b): Using the Product of Exponentials approach, the structure
Exercise 1b: Differential Kinematics of the ABB IRB 120
 Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
, respectively to the inverse and the inverse differential problem. Check the correctness of the obtained results. Exercise 2 y P 2 P 1.
 Robotics I July 8 Exercise Define the orientation of a rigid body in the 3D space through three rotations by the angles α β and γ around three fixed axes in the sequence Y X and Z and determine the associated
Robotics I July 8 Exercise Define the orientation of a rigid body in the 3D space through three rotations by the angles α β and γ around three fixed axes in the sequence Y X and Z and determine the associated
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Ch. 5: Jacobian. 5.1 Introduction
 5.1 Introduction relationship between the end effector velocity and the joint rates differentiate the kinematic relationships to obtain the velocity relationship Jacobian matrix closely related to the
5.1 Introduction relationship between the end effector velocity and the joint rates differentiate the kinematic relationships to obtain the velocity relationship Jacobian matrix closely related to the
Screw Theory and its Applications in Robotics
 Screw Theory and its Applications in Robotics Marco Carricato Group of Robotics, Automation and Biomechanics University of Bologna Italy IFAC 2017 World Congress, Toulouse, France Table of Contents 1.
Screw Theory and its Applications in Robotics Marco Carricato Group of Robotics, Automation and Biomechanics University of Bologna Italy IFAC 2017 World Congress, Toulouse, France Table of Contents 1.
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
Lecture Note 7: Velocity Kinematics and Jacobian
 ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
Chapter 6. Screw theory for instantaneous kinematics. 6.1 Introduction. 6.2 Exponential coordinates for rotation
 Screw theory for instantaneous kinematics 6.1 Introduction Chapter 6 Screw theory was developed by Sir Robert Stawell Ball [111] in 1876, for application in kinematics and statics of mechanisms (rigid
Screw theory for instantaneous kinematics 6.1 Introduction Chapter 6 Screw theory was developed by Sir Robert Stawell Ball [111] in 1876, for application in kinematics and statics of mechanisms (rigid
Rigid Manipulator Control
 Rigid Manipulator Control The control problem consists in the design of control algorithms for the robot motors, such that the TCP motion follows a specified task in the cartesian space Two types of task
Rigid Manipulator Control The control problem consists in the design of control algorithms for the robot motors, such that the TCP motion follows a specified task in the cartesian space Two types of task
Introduction to Robotics
 J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
Trajectory Planning from Multibody System Dynamics
 Trajectory Planning from Multibody System Dynamics Pierangelo Masarati Politecnico di Milano Dipartimento di Ingegneria Aerospaziale Manipulators 2 Manipulator: chain of
Trajectory Planning from Multibody System Dynamics Pierangelo Masarati Politecnico di Milano Dipartimento di Ingegneria Aerospaziale Manipulators 2 Manipulator: chain of
Controllability, Observability & Local Decompositions
 ontrollability, Observability & Local Decompositions Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Lie Bracket Distributions ontrollability ontrollability Distributions
ontrollability, Observability & Local Decompositions Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Lie Bracket Distributions ontrollability ontrollability Distributions
Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation
 ECE5463: Introduction to Robotics Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio,
ECE5463: Introduction to Robotics Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio,
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
Robot Control Basics CS 685
 Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robotics & Automation. Lecture 06. Serial Kinematic Chain, Forward Kinematics. John T. Wen. September 11, 2008
 Robotics & Automation Lecture 06 Serial Kinematic Chain, Forward Kinematics John T. Wen September 11, 2008 So Far... We have covered rigid body rotational kinematics: representations of SO(3), change of
Robotics & Automation Lecture 06 Serial Kinematic Chain, Forward Kinematics John T. Wen September 11, 2008 So Far... We have covered rigid body rotational kinematics: representations of SO(3), change of
Robot Dynamics Instantaneous Kinematiccs and Jacobians
 Robot Dynamics Instantaneous Kinematiccs and Jacobians 151-0851-00 V Lecture: Tuesday 10:15 12:00 CAB G11 Exercise: Tuesday 14:15 16:00 every 2nd week Marco Hutter, Michael Blösch, Roland Siegwart, Konrad
Robot Dynamics Instantaneous Kinematiccs and Jacobians 151-0851-00 V Lecture: Tuesday 10:15 12:00 CAB G11 Exercise: Tuesday 14:15 16:00 every 2nd week Marco Hutter, Michael Blösch, Roland Siegwart, Konrad
Trajectory-tracking control of a planar 3-RRR parallel manipulator
 Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
CE 530 Molecular Simulation
 CE 530 Molecular Simulation Lecture 7 Beyond Atoms: Simulating Molecules David A. Kofke Department of Chemical Engineering SUNY Buffalo kofke@eng.buffalo.edu Review Fundamentals units, properties, statistical
CE 530 Molecular Simulation Lecture 7 Beyond Atoms: Simulating Molecules David A. Kofke Department of Chemical Engineering SUNY Buffalo kofke@eng.buffalo.edu Review Fundamentals units, properties, statistical
Robotics I. Test November 29, 2013
 Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Introduction and Vectors Lecture 1
 1 Introduction Introduction and Vectors Lecture 1 This is a course on classical Electromagnetism. It is the foundation for more advanced courses in modern physics. All physics of the modern era, from quantum
1 Introduction Introduction and Vectors Lecture 1 This is a course on classical Electromagnetism. It is the foundation for more advanced courses in modern physics. All physics of the modern era, from quantum
Matrices A brief introduction
 Matrices A brief introduction Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Matrices Semester 1, 2014-15 1 / 41 Definitions Definition A matrix is a set of N real or complex
Matrices A brief introduction Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Matrices Semester 1, 2014-15 1 / 41 Definitions Definition A matrix is a set of N real or complex
Introduction to centralized control
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task
In this section of notes, we look at the calculation of forces and torques for a manipulator in two settings:
 Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
Rigid body dynamics. Basilio Bona. DAUIN - Politecnico di Torino. October 2013
 Rigid body dynamics Basilio Bona DAUIN - Politecnico di Torino October 2013 Basilio Bona (DAUIN - Politecnico di Torino) Rigid body dynamics October 2013 1 / 16 Multiple point-mass bodies Each mass is
Rigid body dynamics Basilio Bona DAUIN - Politecnico di Torino October 2013 Basilio Bona (DAUIN - Politecnico di Torino) Rigid body dynamics October 2013 1 / 16 Multiple point-mass bodies Each mass is
Case Study: The Pelican Prototype Robot
 5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
Rigid Body Motion. Greg Hager Simon Leonard
 Rigid ody Motion Greg Hager Simon Leonard Overview Different spaces used in robotics and why we need to get from one space to the other Focus on Cartesian space Transformation between two Cartesian coordinate
Rigid ody Motion Greg Hager Simon Leonard Overview Different spaces used in robotics and why we need to get from one space to the other Focus on Cartesian space Transformation between two Cartesian coordinate
Lecture Note 7: Velocity Kinematics and Jacobian
 ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
Kinematics. Félix Monasterio-Huelin, Álvaro Gutiérrez & Blanca Larraga. September 5, Contents 1. List of Figures 1.
 Kinematics Féli Monasterio-Huelin, Álvaro Gutiérre & Blanca Larraga September 5, 2018 Contents Contents 1 List of Figures 1 List of Tables 2 Acronm list 3 1 Degrees of freedom and kinematic chains of rigid
Kinematics Féli Monasterio-Huelin, Álvaro Gutiérre & Blanca Larraga September 5, 2018 Contents Contents 1 List of Figures 1 List of Tables 2 Acronm list 3 1 Degrees of freedom and kinematic chains of rigid
Matrices A brief introduction
 Matrices A brief introduction Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Matrices Semester 1, 2014-15 1 / 44 Definitions Definition A matrix is a set of N real or complex
Matrices A brief introduction Basilio Bona DAUIN Politecnico di Torino Semester 1, 2014-15 B. Bona (DAUIN) Matrices Semester 1, 2014-15 1 / 44 Definitions Definition A matrix is a set of N real or complex
Optimal Control, Guidance and Estimation. Lecture 16. Overview of Flight Dynamics II. Prof. Radhakant Padhi. Prof. Radhakant Padhi
 Optimal Control, Guidance and Estimation Lecture 16 Overview of Flight Dynamics II Prof. Radhakant Padhi Dept. of erospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Prof.
Optimal Control, Guidance and Estimation Lecture 16 Overview of Flight Dynamics II Prof. Radhakant Padhi Dept. of erospace Engineering Indian Institute of Science - Bangalore Point Mass Dynamics Prof.
Classical Mechanics. Luis Anchordoqui
 1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
Robotics. Kinematics. Marc Toussaint University of Stuttgart Winter 2017/18
 Robotics Kinematics 3D geometry, homogeneous transformations, kinematic map, Jacobian, inverse kinematics as optimization problem, motion profiles, trajectory interpolation, multiple simultaneous tasks,
Robotics Kinematics 3D geometry, homogeneous transformations, kinematic map, Jacobian, inverse kinematics as optimization problem, motion profiles, trajectory interpolation, multiple simultaneous tasks,
Interpolated Rigid-Body Motions and Robotics
 Interpolated Rigid-Body Motions and Robotics J.M. Selig London South Bank University and Yuanqing Wu Shanghai Jiaotong University. IROS Beijing 2006 p.1/22 Introduction Interpolation of rigid motions important
Interpolated Rigid-Body Motions and Robotics J.M. Selig London South Bank University and Yuanqing Wu Shanghai Jiaotong University. IROS Beijing 2006 p.1/22 Introduction Interpolation of rigid motions important
Robotics I. June 6, 2017
 Robotics I June 6, 217 Exercise 1 Consider the planar PRPR manipulator in Fig. 1. The joint variables defined therein are those used by the manufacturer and do not correspond necessarily to a Denavit-Hartenberg
Robotics I June 6, 217 Exercise 1 Consider the planar PRPR manipulator in Fig. 1. The joint variables defined therein are those used by the manufacturer and do not correspond necessarily to a Denavit-Hartenberg
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Rotational & Rigid-Body Mechanics. Lectures 3+4
 Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
MSMS Vectors and Matrices
 MSMS Vectors and Matrices Basilio Bona DAUIN Politecnico di Torino Semester 1, 2015-2016 B. Bona (DAUIN) MSMS-Vectors and matrices Semester 1, 2015-2016 1 / 39 Introduction Most of the topics introduced
MSMS Vectors and Matrices Basilio Bona DAUIN Politecnico di Torino Semester 1, 2015-2016 B. Bona (DAUIN) MSMS-Vectors and matrices Semester 1, 2015-2016 1 / 39 Introduction Most of the topics introduced
Inverting: Representing rotations and translations between coordinate frames of reference. z B. x B x. y B. v = [ x y z ] v = R v B A. y B.
![Inverting: Representing rotations and translations between coordinate frames of reference. z B. x B x. y B. v = [ x y z ] v = R v B A. y B.](/thumbs/92/108108543.jpg "Inverting: Representing rotations and translations between coordinate frames of reference. z B. x B x. y B. v = [ x y z ] v = R v B A. y B.") Kinematics Kinematics: Given the joint angles, comute the han osition = Λ( q) Inverse kinematics: Given the han osition, comute the joint angles to attain that osition q = Λ 1 ( ) s usual, inverse roblems
Kinematics Kinematics: Given the joint angles, comute the han osition = Λ( q) Inverse kinematics: Given the han osition, comute the joint angles to attain that osition q = Λ 1 ( ) s usual, inverse roblems
Kinematic representation! Iterative methods! Optimization methods
 Human Kinematics Kinematic representation! Iterative methods! Optimization methods Kinematics Forward kinematics! given a joint configuration, what is the position of an end point on the structure?! Inverse
Human Kinematics Kinematic representation! Iterative methods! Optimization methods Kinematics Forward kinematics! given a joint configuration, what is the position of an end point on the structure?! Inverse
Lesson Rigid Body Dynamics
 Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Quaternions. Basilio Bona. Semester 1, DAUIN Politecnico di Torino. B. Bona (DAUIN) Quaternions Semester 1, / 40
 Quaternions Semester 1, / 40") Quaternions Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-2017 B. Bona (DAUIN) Quaternions Semester 1, 2016-2017 1 / 40 Introduction Complex numbers with unit norm can be used as rotation operators
Quaternions Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-2017 B. Bona (DAUIN) Quaternions Semester 1, 2016-2017 1 / 40 Introduction Complex numbers with unit norm can be used as rotation operators
Pose estimation from point and line correspondences
 Pose estimation from point and line correspondences Giorgio Panin October 17, 008 1 Problem formulation Estimate (in a LSE sense) the pose of an object from N correspondences between known object points
Pose estimation from point and line correspondences Giorgio Panin October 17, 008 1 Problem formulation Estimate (in a LSE sense) the pose of an object from N correspondences between known object points
Robotics, Geometry and Control - Rigid body motion and geometry
 Robotics, Geometry and Control - Rigid body motion and geometry Ravi Banavar 1 1 Systems and Control Engineering IIT Bombay HYCON-EECI Graduate School - Spring 2008 The material for these slides is largely
Robotics, Geometry and Control - Rigid body motion and geometry Ravi Banavar 1 1 Systems and Control Engineering IIT Bombay HYCON-EECI Graduate School - Spring 2008 The material for these slides is largely
Robot Dynamics II: Trajectories & Motion
 Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Homogeneous Transformations
 Purpose: Homogeneous Transformations The purpose of this chapter is to introduce you to the Homogeneous Transformation. This simple 4 x 4 transformation is used in the geometry engines of CAD systems and
Purpose: Homogeneous Transformations The purpose of this chapter is to introduce you to the Homogeneous Transformation. This simple 4 x 4 transformation is used in the geometry engines of CAD systems and
Position and orientation of rigid bodies
 Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A z A p AB B RF B z B x B y A rigid body
Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A z A p AB B RF B z B x B y A rigid body
Manipulator Dynamics 2. Instructor: Jacob Rosen Advanced Robotic - MAE 263D - Department of Mechanical & Aerospace Engineering - UCLA
 Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Tensor Analysis in Euclidean Space
 Tensor Analysis in Euclidean Space James Emery Edited: 8/5/2016 Contents 1 Classical Tensor Notation 2 2 Multilinear Functionals 4 3 Operations With Tensors 5 4 The Directional Derivative 5 5 Curvilinear
Tensor Analysis in Euclidean Space James Emery Edited: 8/5/2016 Contents 1 Classical Tensor Notation 2 2 Multilinear Functionals 4 3 Operations With Tensors 5 4 The Directional Derivative 5 5 Curvilinear
Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements
 Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Seminar on Mechanical Robotic Systems Centre for Intelligent Machines McGill University Consistent Triangulation for Mobile Robot Localization Using Discontinuous Angular Measurements Josep M. Font Llagunes
Lecture «Robot Dynamics»: Kinematics 2
 Lecture «Robot Dynamics»: Kinematics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS
 ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 4 KINEMATICS OF PARALLEL ROBOTS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian Institute of Science
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 4 KINEMATICS OF PARALLEL ROBOTS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian Institute of Science
q 1 F m d p q 2 Figure 1: An automated crane with the relevant kinematic and dynamic definitions.
 Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
(r i F i ) F i = 0. C O = i=1
 F i = 0. C O = i=1") Notes on Side #3 ThemomentaboutapointObyaforceF that acts at a point P is defined by M O (r P r O F, where r P r O is the vector pointing from point O to point P. If forces F, F, F 3,..., F N act on particles
Notes on Side #3 ThemomentaboutapointObyaforceF that acts at a point P is defined by M O (r P r O F, where r P r O is the vector pointing from point O to point P. If forces F, F, F 3,..., F N act on particles
MSMS Basilio Bona DAUIN PoliTo
 MSMS 214-215 Basilio Bona DAUIN PoliTo Problem 2 The planar system illustrated in Figure 1 consists of a bar B and a wheel W moving (no friction, no sliding) along the bar; the bar can rotate around an
MSMS 214-215 Basilio Bona DAUIN PoliTo Problem 2 The planar system illustrated in Figure 1 consists of a bar B and a wheel W moving (no friction, no sliding) along the bar; the bar can rotate around an
In most robotic applications the goal is to find a multi-body dynamics description formulated
 Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Lecture 2: Controllability of nonlinear systems
 DISC Systems and Control Theory of Nonlinear Systems 1 Lecture 2: Controllability of nonlinear systems Nonlinear Dynamical Control Systems, Chapter 3 See www.math.rug.nl/ arjan (under teaching) for info
DISC Systems and Control Theory of Nonlinear Systems 1 Lecture 2: Controllability of nonlinear systems Nonlinear Dynamical Control Systems, Chapter 3 See www.math.rug.nl/ arjan (under teaching) for info
Optimal Control, Guidance and Estimation. Lecture 17. Overview of Flight Dynamics III. Prof. Radhakant Padhi. Prof.
 Optimal Control, Guidance and Estimation Lecture 17 Overview of Flight Dynamics III Prof. adhakant Padhi Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Six DOF Model Prof. adhakant
Optimal Control, Guidance and Estimation Lecture 17 Overview of Flight Dynamics III Prof. adhakant Padhi Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Six DOF Model Prof. adhakant
arxiv: v1 [math.ds] 18 Nov 2008
![arxiv: v1 [math.ds] 18 Nov 2008](/thumbs/83/88606126.jpg "arxiv: v1 [math.ds] 18 Nov 2008") arxiv:0811.2889v1 [math.ds] 18 Nov 2008 Abstract Quaternions And Dynamics Basile Graf basile.graf@epfl.ch February, 2007 We give a simple and self contained introduction to quaternions and their practical
arxiv:0811.2889v1 [math.ds] 18 Nov 2008 Abstract Quaternions And Dynamics Basile Graf basile.graf@epfl.ch February, 2007 We give a simple and self contained introduction to quaternions and their practical