Analytical and Numerical Methods Used in Studying the Spatial kinematics of Multi-body Systems. Bernard Roth Stanford University
|
|
|
- Gary Stephens
- 5 years ago
- Views:
Transcription
1 Analytical and Numerical Methods Used in Studying the Spatial kinematics of Multi-body Systems Bernard Roth Stanford University
2


3 Closed Loop Bound on number of solutions=2 6 =64
4
5




6
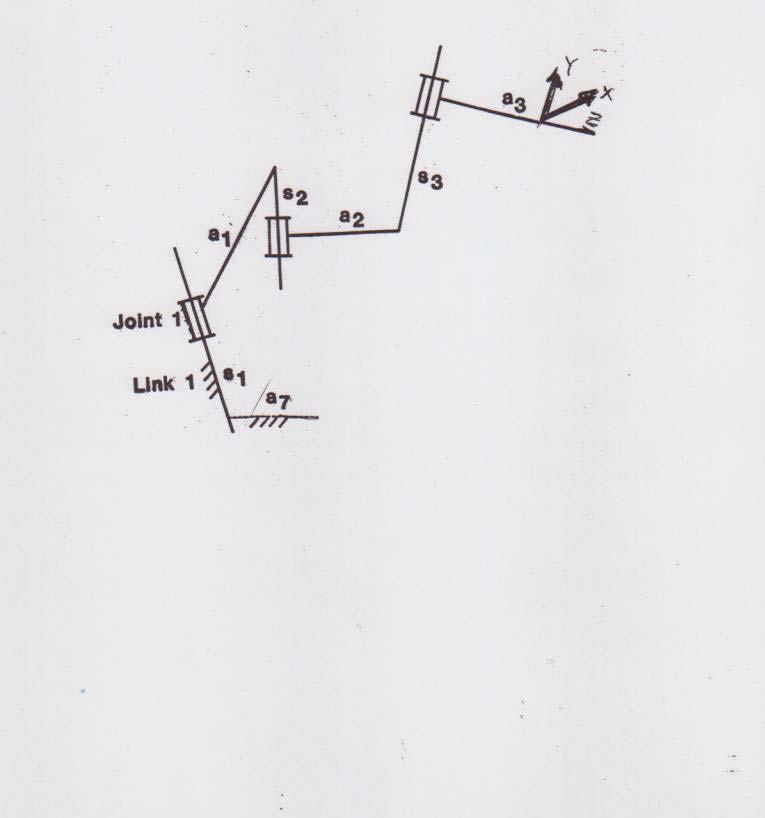
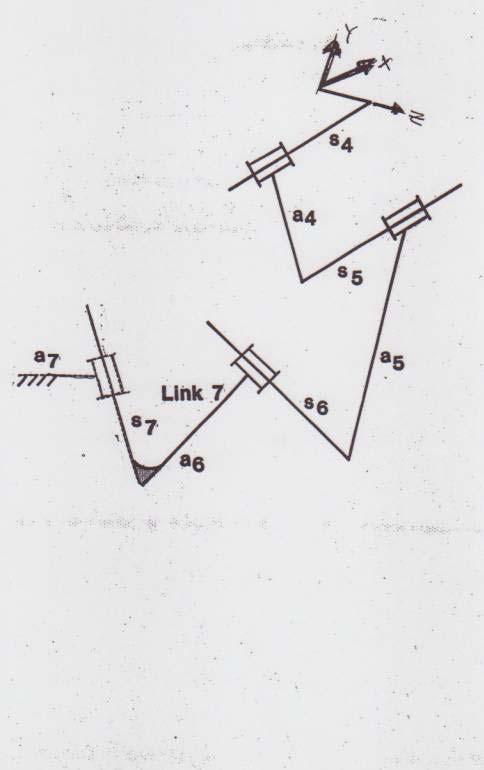
7 Open chain constraint
8 C-C dyad and equivalent screw
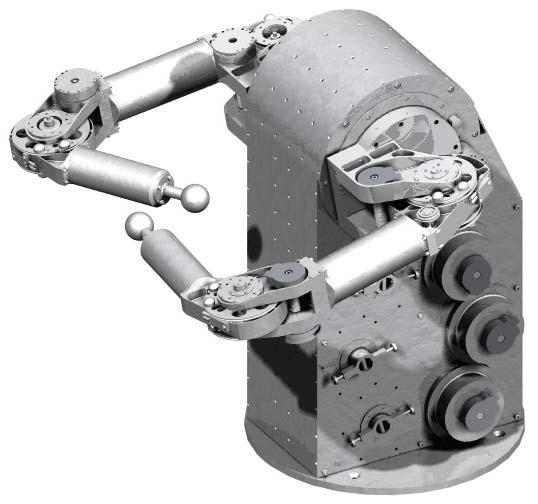
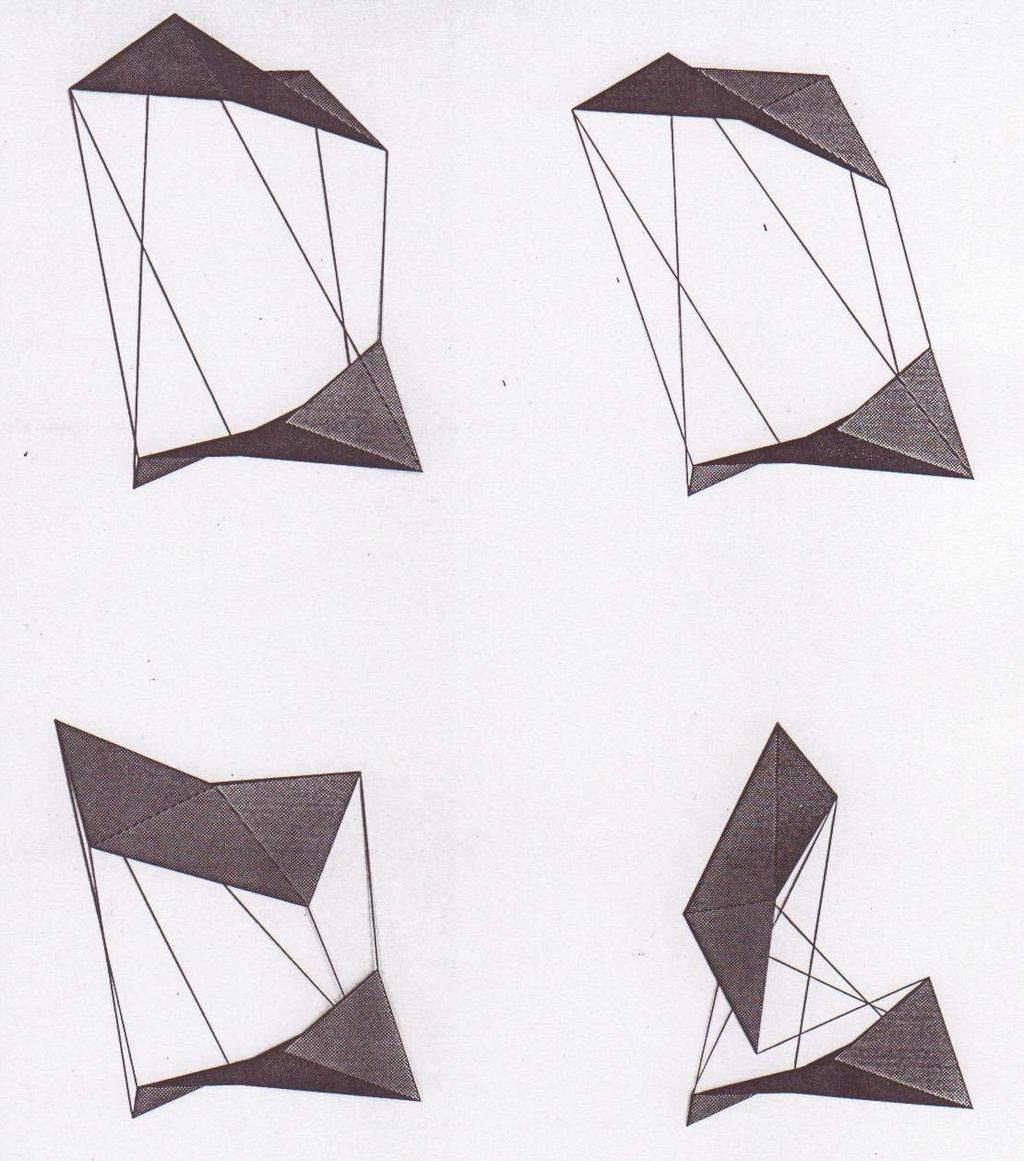
9 Overconstrained 6R linkage chains

10 Bennett four-bar




11 DLR Arm Puma Barrett WAM
12 θ7
13
14
15
16 z 1 (x lg2 -x 1G3 ) 2 + (y lg2 -y 1G3 ) 2 + (z 1G2 - z 1G3 ) 2 = (G 2 G 3 ) 2 x lg2 =a 1 cosφ; x 1G3 =-a 4 +a 3 cosφ; y lg2 =a 1 sinφ; y 1G3 = -s 4 sinα 4 +a 3 sinψ cosα 4 z 1G2 =s 1 ; z 1G3 =-s 4 cosα 4 a 3 sinψ sinα 4 ; (G 2 G 3 )=a 2 By application of trigonometric identities and ordering of terms this becomes A sinψ + B cosψ = C A = - cosα 4 sinφ + s 1 sinα 4 /a 1 B = -a 4 /a 1 cosφ C =-(a 12 -a 22 + a 32 + a 42 + s 12 + s s 1 s 4 cosα 4 )/2a 1 a 3 -a 4 cosφ/a 3 -s 4 sinα 4 sinφ/a 3
17
18 Manipulator Kinematics Link Description Denavit-Hartenberg Notation Forward Kinematics Inverse Kinematics
19 Link Description Axis i Axis (I-1) Link I-1 a i-1 == α i-1 ==
20 Kinematic Chain jointi 1 joint 1 Linki 2 Link i z i joint i Link 1 zi 1 Linki 1 R i y i z, z 0 1 Link 0 y 1 Ri 1 yi 1 xi 1 x i Link n R n z n joint n θ R0 1 y0 x R 0 1 x 1 Linkn 1 x n y n
21 Forward Kinematics Axis (i-1) Axis i Link i Link i-1 z i x i a i } d i z i-1 x i-1 a i-1 θ i α i-1 i - 1 T = 1 cθ i -sθ i 0 a i-1 sθ i cα i-1 cθ i cα i-1 -sα i-1 -sα i-1 d i sθ i sα i-1 cθ i sα i-1 cα i-1 cα i-1 d i
22 Forward Kinematics Axis (i-1) Axis i Link i Link i-1 z i x i a i } d i z i-1 x i-1 a i-1 θ i α i-1 Forward Kinematics: 0 N 0 T = T T... T N-1 N

23 Stanford Scheinman Arm
24 Example - RPRR L 5 Z 1 Z 3 O 3 O 4 L 2 O 0,O 1 O 2 Z 2 Z 4 L 4 O 5 z 5 x 5 i α i-1 a i-1 d i θ i θ d L 2 0 θ L θ L 4 0 0
25 T= 0 6 L NM XXcccs sss+ css cds sd XXsccs+ css+ ssc sds+ cd XX scs 245+ cc 5 2 dc O QP d 2 Z 0 Y 0 X 6 X 0 d 3 Z 6 Y 6 x x P r1 = r 2 = r3 CSd SSd C [ C ( C C C S S ) S S C ] S ( S C C + C S ) S [ C ( C C C S S ) S S C ] + C ( S C C + C S ) S ( C C C S S ) C S C C[ C( CCS + SC) + SSS] S( SCS + CC) S [ C ( C C S + S C ) + S S S ] + C ( SCS + CC) S ( C C S + S C ) + C S S C ( C C S + S C ) S S S S ( C C S + S C ) + C S S C d Sd Cd SCS + CC
26 Inverse Kinematics Finding joint positions given end-effector position and orientation Solvability, Existence, Multiplicity Closed Form/Numerical Solutions
27 Analytic, Synthetic and Numerical Geometry in Mechanism Science A Long family history Analytic geometry classic approach Synthetic geometry pre-classic approach Numerical geometry neo-classic approach
28 Methods for solving equations Elimination (resultants) Continuation (homotopy) Gröbner bases (standard) Symbolic Number of Solutions Bezout count M-homogenous count BKK bound Linear product decomposition
29 Methods to get polynomials Tangent half-angle substitution cosθ 1 x 1 x 2 = + 2 sin 2 2x θ θ = x = tan 1 + x 2 Additional equations cosα sinβ 3= 0 xy 3= cosβsinα 5= 0 xy 5= 0 x x y1 = y2 = 1
30 Advanced methods to avoid sines and cosines Isotropic coordinates in the plane Mappings Quaternions in 3-D Soma coordinates Rodriques parameters Euler parameters Matrix exponents (Lie groups)
31 Elimination Methods Methods require an eliminant (or a resultant), which, at best, is a polynomial in a single unknown. Advantages: Gives all solutions to a set of nonlinear equations. Gives analytical means to determine the influence of the system parameters on the number and character of the solutions.
32 f 1 : Example 2 equations, 2 unknowns; nonlinear f :3x x + 2x + 9= 0 f :6x x + x + 8= equations, 3 unknowns; linear if each power product is considered an unknown (3 x ) x + (2) x + (9)1 = (6x + 1) x + (8)1 = equations, 3 unknowns; linear and linearly independent equations (3 x ) x + (2) x + (9)1 = (6x + 1) x + (8)1 = (6x + 1) x + (8) x =
33 2 2 3x2 2 9 x x x = 0 6x Determinant is Sylvester type resultant det 516x 12x + 7 = 0 x = 0.129; x = x x 1 = 0 6x 1 x x = 35.1; x =
34 Objective: Find minimal number of new power products.
35 ELIMINATION PROCEDURE 1. Rewrite equations with one variable suppressed. 2. Define the remaining power products as new linear unknowns. 3. Use the original equations to manufacture new linearly independent equations so as to have as many linearly independent homogeneous equations as linear unknowns. 4. Set the determinant of the coefficient matrix to zero, and obtain a polynomial in the suppressed variable. (If interested in only numerical solutions, this step can be omitted if we calculate eigenvalues in Step 5.) 5. Determine the roots of the characteristic polynomial of the matrix, or the eigenvalues of a derived matrix. (This yields all possible values for the suppressed variable.) 6. Substitute (one of the roots or eigenvalues) for the suppressed variable and solve the linear system for the remaining unknowns. Repeat this for each value of the suppressed variable. Note: Step 3 is the big issue!
36 Minumum n Minimum n not easy to determine. When n is known, it is not easy to determine the equations. Size of nxn system is not directly related to the degree of suppressed variable ( ax + c) y + ( dx ) y + ( bx + ex + f ) = 0 Example: suppress x power products balance occurs at n Suppress y ( hx) y + ( kx) y + ( gx + ix + jx + lx + m) = 0 4 = 6 ( b) x + ( dy + e) x + ( ay ) x + ( cy + f ) = 0 gx+ ix+ jx+ hy+ ky + lx+ m= 5 power products balance occurs at n= ( ) ( ) ( ) ( ) 0
37 x cosθ1 sinθ1 0 0 cosθ2 sinθ2 0 a1 a2 y sinθ1 cosθ1 0 0 sinθ2cosα cosθ2cosα sinα sinαs 2 0 = z sinθ2sinα cosθ2sinα cosα cosαs x= a cosθ cosθ a cosαsinθ sinθ + s sinαsinθ + a cosθ y = a sinθ cosθ + a cosαcosθ sinθ s sinαcosθ + a sinθ z = a sinαsinθ + s cosα x = a cos θ cos θ + a cos αsin θ sin θ + s sin αsin θ + a cos θ 2a cosθ cosθ sinθ sinθ + 2a s sinαcosθ cosθ sinθ + 2aa cos θ cosθ as cosαsinαsin θ sinθ 2aa cosαcosθ sinθ sinθ + 2sa sinαsinθ cosθ x + y = a cos θ + a cos αsin θ + ( s sin α + a ) + 2aa cosθ 2a s cosαsinαsinθ x + y + z = ( a + a + s ) + 2 a ( a s )sinαcosαsinθ + 2aa cosθ
38 x= a cosθ cosθ a cosαsinθ sinθ + s sinαsinθ + a cosθ y = a sinθ cosθ + a cosαcosθ sinθ s sinαcosθ + a sinθ z = a sinαsinθ + s cosα ( a cos θ ) cosθ ( a cosαsin θ ) sinθ + ( s sinαsinθ + a cos θ x) 1 = ( a sin θ ) cosθ + ( a cosαcos θ ) sinθ ( s sinαcosθ + a sin θ y) 1 = ( a sin α) sinθ + ( s cos α z) 1 = ( a cos θ ) ( a cosαsin θ ) ( s sinαsinθ + a cos θ x) ( a sinθ ) ( a cosαcos θ ) ( s sinαcosθ + a sin θ y) ( a cosα cos θ ) ( s cosα z) = 0 xa sinα sinθ + ya sinαcos θ + a ( s zcos α) = Asinθ + Bcosθ + C = 0 1 1
39 General 6-degree-of-freedom 0 = hand hand T T T T T T T 2 TTT 3 4 = 1 T 1 0 T 1 0 T 5 T hand hand
40
41 Original 6 equations: L P Manufactured 8 new equations L P, L P, P P, ( P P) L 2( L P) P Total 14 scalar eqations with the same power products

42 Direct kinematics of platform manipulator
43 For In-Parallel Mechanisms The general 6/6 platform mechanism has, at most, 40 different poses associated with a set of leg lengths. For different special geometries derived from the 6/6 platform there may be, at most, 4, 8, 12, 16, 24 poses for a given set of leg lengths.
44
45 Planar and similar platforms 16 solutions but polynomial degree=2
46 Multi-step Elimination f ( x, y, z) = 0 h( z) = * g1( x, y) = 0 h1 ( y) = 0 * 2 2 * g2( x, y) = 0 h2( y) = 0 3 = 3 = f ( x, y, z) = 0 h ( z) = 0 g ( x) = 0 f ( x, y, z) 0 h ( z) 0 solve x suppress x eliminate y suppress x& y eliminate z
47 Multivariate Problems -resultants Dixon (1908)-resultant is a determinant, gotten by introducing dummy parameters Maccaulay (1916) resultant is ratio of two determinants Sturmfels and Zelevinski (1994) r groups of variables; multiply each equation by all variables of only one group; yields Sylvester type resultant. Emris (1993, 1994) Use of Newton polytopes of equations to construct sparse mixed resultant.
48 Multihomogeneous Sturmfels & Zelevinsky π( j) < π( k) mk = ( dk 1) lk + d k Multiply each equation by all terms of degree m k in the variable groups x k. Example: 3xxx xx x2+ 6= 0 6xx + 6x xx 5= xxx 8x + 2x 3= 0 l k j = l j d k = degree # of variables (3 x ) x x + (5 x ) xw + (2) wx + (6) ww = (6) xx + (6) xw + ( x) wx + ( 5) ww = (7 x ) x x + ( 8) xw + (2) wx + ( 3) ww =
49 x m m { } { } = x, w, x = x, w = (1 1)1+ 1(0) = 0 = (1 1)1 + 1(1) = x3 2 5x3 6 xx x wx x xxw = 3x3 2 5x wxw x xw x ww 0 1 2
50 Homotopy
51 Polynomial continuation To solve F 1 (X) =0 Solve instead: F m (X)=(1-t)F 0 (X)+tF 1 (X) =0 Start with F 0 (X)=0, with known solutions. t is varied in steps from 0 to 1. Use solution at each step as an initial guess for the equations of the next step Disadvantages: Tracks one solution at a time, and no advantage to having other solutions. Tracks unwanted solutions at infinity.
52 Polynomial Continuation Example f : 3x x + 2x + 9= 0 f : 6x x + x + 8= 0 g : x 1 = 0 x = 1, 1, i, i g : x 1= 0 x = 1, H ( x, t) = (1 t) e ( x 1) + t(3xx+ 2x+ 9) = 0 iθ H ( x, t) = (1 t) e ( x 1) + t(6xx+ x+ 8) = 0 iθ at t = 0, we know 8 solutions: (1,1),(1, 1),( 1,1), ( 1, 1), ( i,1), ( i, 1), ( i,1), ( i, 1)
53
54 Important results with continuation First proof that the 6R manipulators has 16 solutions for the inverse kinematics First proof that the generalized Stewart Platform has 40 solutions for the direct kinematics problem First synthesis for 9 points on coupler curve of planar 4-bar
55 Continuous functions In an n-dimensional space Algebraic set of dimension k and deg. d Intersects a linear subspace of dimension n-k In d points Examples: Curve (k=1) of deg. d, in the 3 space plane (n=2) (n=3) Intersects a line (n-k=1) in d points plane (n-k=2)
56 The procedure in genereral Take (n-k) to determine the dimension of the generic linear subset that does the cutting. (This is the co-dimension of the original space.) The generic (n-k)-dimensional linear subset is gotten by using k hyperplanes
57 Dummy variable added to n x n system f 1 (x 1, x 2, x 3,.., x n,x (n+1) )=0 f 2 (x 1, x 2, x 3,.., x n,x (n+1) )=0 f 3 (x 1, x 2, x 3,.., x n,x (n+1) )=0... f n (x 1, x 2, x 3,.., x n,x (n+1) )=0 a 1 x 1 +a 2 x 2 +a 3 x 3 + +a n x n +a (n+1) x (n+1) =0
58 Abreviated procedure For ordinary continuation, dimension=zero, we get isolated points. To find a curve, dimension=1, we use a hyperplane, and vary it. To find a surface, dimension=2, we need two hyperplanes (hyperline). To find a volume, dimension=3, we need three hyperplanes. Etc.
59 Witness points Find the d points of intersection using polynomial continuation. These d points are named witness points. Repeatedly vary the planes in n-space to get a large set of witness points. Fit these witness points to a polynomial of degree d ( or use a projection to a lower dimension, or use Monodromy algorithm.) (See Sommese, Vershelde, Wampler)
60 Current Situation Continuation methods for isolated solutions Highly developed in 1980 s, 1990 s Numerical algebraic geometry started 1995 Builds on the methods for isolated roots Treats positive-dimensional sets Witness sets are the key construct Bertini-beta is available Isolated solutions: multi-homogeneous homotopy Positive-dimensional: irreducible decomposition Multiple precision for high-degree systems
61 Gröbner Bases Uses the ideas similar to Gaussian elimination to produce a triangular set of equations. Ideally resulting in one equation is one unknown. Determines a simple set of equations with same ideal as original set.
62 Symbolic Mathematica Maple Etc Is there a general theory for symbolic solution generation? How to deal with trade-offs of degree and number? How to deal with getting simplifications?
63 Thank you!
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic Functions Kinematic functions Kinematics deals with the study of four functions(called kinematic functions or KFs) that mathematically
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic Functions Kinematic functions Kinematics deals with the study of four functions(called kinematic functions or KFs) that mathematically
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS
 ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 4 KINEMATICS OF PARALLEL ROBOTS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian Institute of Science
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 4 KINEMATICS OF PARALLEL ROBOTS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian Institute of Science
Numerical Algebraic Geometry and Symbolic Computation
 Numerical Algebraic Geometry and Symbolic Computation Jan Verschelde Department of Math, Stat & CS University of Illinois at Chicago Chicago, IL 60607-7045, USA jan@math.uic.edu www.math.uic.edu/~jan ISSAC
Numerical Algebraic Geometry and Symbolic Computation Jan Verschelde Department of Math, Stat & CS University of Illinois at Chicago Chicago, IL 60607-7045, USA jan@math.uic.edu www.math.uic.edu/~jan ISSAC
Roots of a Polynomial System
 Roots of a Polynomial System (Com S 477/577 Notes) Yan-Bin Jia Sep 8, 017 Systems of polynomial equations show up in many applications areas such as robotics (kinematics, motion planning, collision detection,
Roots of a Polynomial System (Com S 477/577 Notes) Yan-Bin Jia Sep 8, 017 Systems of polynomial equations show up in many applications areas such as robotics (kinematics, motion planning, collision detection,
DYNAMICS OF PARALLEL MANIPULATOR
 DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
The Numerical Solution of Polynomial Systems Arising in Engineering and Science
 The Numerical Solution of Polynomial Systems Arising in Engineering and Science Jan Verschelde e-mail: jan@math.uic.edu web: www.math.uic.edu/ jan Graduate Student Seminar 5 September 2003 1 Acknowledgements
The Numerical Solution of Polynomial Systems Arising in Engineering and Science Jan Verschelde e-mail: jan@math.uic.edu web: www.math.uic.edu/ jan Graduate Student Seminar 5 September 2003 1 Acknowledgements
GEOMETRIC DESIGN OF CYLINDRIC PRS SERIAL CHAINS
 Proceedings of DETC 03 2003 ASME Design Engineering Technical Conferences September 2 6, 2003, Chicago, Illinois, USA DETC2003/DAC-48816 GEOMETRIC DESIGN OF CYLINDRIC PRS SERIAL CHAINS Hai-Jun Su suh@eng.uci.edu,
Proceedings of DETC 03 2003 ASME Design Engineering Technical Conferences September 2 6, 2003, Chicago, Illinois, USA DETC2003/DAC-48816 GEOMETRIC DESIGN OF CYLINDRIC PRS SERIAL CHAINS Hai-Jun Su suh@eng.uci.edu,
Preliminary algebra. Polynomial equations. and three real roots altogether. Continue an investigation of its properties as follows.
 978-0-51-67973- - Student Solutions Manual for Mathematical Methods for Physics and Engineering: 1 Preliminary algebra Polynomial equations 1.1 It can be shown that the polynomial g(x) =4x 3 +3x 6x 1 has
978-0-51-67973- - Student Solutions Manual for Mathematical Methods for Physics and Engineering: 1 Preliminary algebra Polynomial equations 1.1 It can be shown that the polynomial g(x) =4x 3 +3x 6x 1 has
x 3y 2z = 6 1.2) 2x 4y 3z = 8 3x + 6y + 8z = 5 x + 3y 2z + 5t = 4 1.5) 2x + 8y z + 9t = 9 3x + 5y 12z + 17t = 7
 2x 4y 3z = 8 3x + 6y + 8z = 5 x + 3y 2z + 5t = 4 1.5) 2x + 8y z + 9t = 9 3x + 5y 12z + 17t = 7") Linear Algebra and its Applications-Lab 1 1) Use Gaussian elimination to solve the following systems x 1 + x 2 2x 3 + 4x 4 = 5 1.1) 2x 1 + 2x 2 3x 3 + x 4 = 3 3x 1 + 3x 2 4x 3 2x 4 = 1 x + y + 2z = 4 1.4)
Linear Algebra and its Applications-Lab 1 1) Use Gaussian elimination to solve the following systems x 1 + x 2 2x 3 + 4x 4 = 5 1.1) 2x 1 + 2x 2 3x 3 + x 4 = 3 3x 1 + 3x 2 4x 3 2x 4 = 1 x + y + 2z = 4 1.4)
Kinematics of a UR5. Rasmus Skovgaard Andersen Aalborg University
 Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
Kinematic Analysis of the 6R Manipulator of General Geometry
 Kinematic Analysis of the 6R Manipulator of General Geometry Madhusudan Raghavan Powertrain Systems Research Lab General Motors R&D Center Warren, MI 48090-9055 and Bernard Roth, Professor Design Division
Kinematic Analysis of the 6R Manipulator of General Geometry Madhusudan Raghavan Powertrain Systems Research Lab General Motors R&D Center Warren, MI 48090-9055 and Bernard Roth, Professor Design Division
David Eklund. May 12, 2017
 KTH Stockholm May 12, 2017 1 / 44 Isolated roots of polynomial systems Let f 1,..., f n C[x 0,..., x n ] be homogeneous and consider the subscheme X P n defined by the ideal (f 1,..., f n ). 2 / 44 Isolated
KTH Stockholm May 12, 2017 1 / 44 Isolated roots of polynomial systems Let f 1,..., f n C[x 0,..., x n ] be homogeneous and consider the subscheme X P n defined by the ideal (f 1,..., f n ). 2 / 44 Isolated
Tutorial: Numerical Algebraic Geometry
 Tutorial: Numerical Algebraic Geometry Back to classical algebraic geometry... with more computational power and hybrid symbolic-numerical algorithms Anton Leykin Georgia Tech Waterloo, November 2011 Outline
Tutorial: Numerical Algebraic Geometry Back to classical algebraic geometry... with more computational power and hybrid symbolic-numerical algorithms Anton Leykin Georgia Tech Waterloo, November 2011 Outline
Certificates in Numerical Algebraic Geometry. Jan Verschelde
 Certificates in Numerical Algebraic Geometry Jan Verschelde University of Illinois at Chicago Department of Mathematics, Statistics, and Computer Science http://www.math.uic.edu/ jan jan@math.uic.edu FoCM
Certificates in Numerical Algebraic Geometry Jan Verschelde University of Illinois at Chicago Department of Mathematics, Statistics, and Computer Science http://www.math.uic.edu/ jan jan@math.uic.edu FoCM
Homework #6 Solutions
 Problems Section.1: 6, 4, 40, 46 Section.:, 8, 10, 14, 18, 4, 0 Homework #6 Solutions.1.6. Determine whether the functions f (x) = cos x + sin x and g(x) = cos x sin x are linearly dependent or linearly
Problems Section.1: 6, 4, 40, 46 Section.:, 8, 10, 14, 18, 4, 0 Homework #6 Solutions.1.6. Determine whether the functions f (x) = cos x + sin x and g(x) = cos x sin x are linearly dependent or linearly
CHAPTER 4. APPLICATIONS AND REVIEW IN TRIGONOMETRY
 CHAPTER 4. APPLICATIONS AND REVIEW IN TRIGONOMETRY In the present chapter we apply the vector algebra and the basic properties of the dot product described in the last chapter to planar geometry and trigonometry.
CHAPTER 4. APPLICATIONS AND REVIEW IN TRIGONOMETRY In the present chapter we apply the vector algebra and the basic properties of the dot product described in the last chapter to planar geometry and trigonometry.
Solving Polynomial Systems by Homotopy Continuation
 Solving Polynomial Systems by Homotopy Continuation Andrew Sommese University of Notre Dame www.nd.edu/~sommese Algebraic Geometry and Applications Seminar IMA, September 13, 2006 Reference on the area
Solving Polynomial Systems by Homotopy Continuation Andrew Sommese University of Notre Dame www.nd.edu/~sommese Algebraic Geometry and Applications Seminar IMA, September 13, 2006 Reference on the area
Core A-level mathematics reproduced from the QCA s Subject criteria for Mathematics document
 Core A-level mathematics reproduced from the QCA s Subject criteria for Mathematics document Background knowledge: (a) The arithmetic of integers (including HCFs and LCMs), of fractions, and of real numbers.
Core A-level mathematics reproduced from the QCA s Subject criteria for Mathematics document Background knowledge: (a) The arithmetic of integers (including HCFs and LCMs), of fractions, and of real numbers.
THE COMPOUND ANGLE IDENTITIES
 TRIGONOMETRY THE COMPOUND ANGLE IDENTITIES Question 1 Prove the validity of each of the following trigonometric identities. a) sin x + cos x 4 4 b) cos x + + 3 sin x + 2cos x 3 3 c) cos 2x + + cos 2x cos
TRIGONOMETRY THE COMPOUND ANGLE IDENTITIES Question 1 Prove the validity of each of the following trigonometric identities. a) sin x + cos x 4 4 b) cos x + + 3 sin x + 2cos x 3 3 c) cos 2x + + cos 2x cos
Math Review 1: Vectors
 Math Review 1: Vectors Coordinate System Coordinate system: used to describe the position of a point in space and consists of 1. An origin as the reference point 2. A set of coordinate axes with scales
Math Review 1: Vectors Coordinate System Coordinate system: used to describe the position of a point in space and consists of 1. An origin as the reference point 2. A set of coordinate axes with scales
 1 Solving equations 1.1 Kick off with CAS 1. Polynomials 1. Trigonometric symmetry properties 1.4 Trigonometric equations and general solutions 1.5 Literal and simultaneous equations 1.6 Review 1.1 Kick
1 Solving equations 1.1 Kick off with CAS 1. Polynomials 1. Trigonometric symmetry properties 1.4 Trigonometric equations and general solutions 1.5 Literal and simultaneous equations 1.6 Review 1.1 Kick
Trajectory-tracking control of a planar 3-RRR parallel manipulator
 Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Local properties of plane algebraic curves
 Chapter 7 Local properties of plane algebraic curves Throughout this chapter let K be an algebraically closed field of characteristic zero, and as usual let A (K) be embedded into P (K) by identifying
Chapter 7 Local properties of plane algebraic curves Throughout this chapter let K be an algebraically closed field of characteristic zero, and as usual let A (K) be embedded into P (K) by identifying
Linear DifferentiaL Equation
 Linear DifferentiaL Equation Massoud Malek The set F of all complex-valued functions is known to be a vector space of infinite dimension. Solutions to any linear differential equations, form a subspace
Linear DifferentiaL Equation Massoud Malek The set F of all complex-valued functions is known to be a vector space of infinite dimension. Solutions to any linear differential equations, form a subspace
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
How to Solve Linear Differential Equations
 How to Solve Linear Differential Equations Definition: Euler Base Atom, Euler Solution Atom Independence of Atoms Construction of the General Solution from a List of Distinct Atoms Euler s Theorems Euler
How to Solve Linear Differential Equations Definition: Euler Base Atom, Euler Solution Atom Independence of Atoms Construction of the General Solution from a List of Distinct Atoms Euler s Theorems Euler
Linear Algebra. Paul Yiu. 6D: 2-planes in R 4. Department of Mathematics Florida Atlantic University. Fall 2011
 Linear Algebra Paul Yiu Department of Mathematics Florida Atlantic University Fall 2011 6D: 2-planes in R 4 The angle between a vector and a plane The angle between a vector v R n and a subspace V is the
Linear Algebra Paul Yiu Department of Mathematics Florida Atlantic University Fall 2011 6D: 2-planes in R 4 The angle between a vector and a plane The angle between a vector v R n and a subspace V is the
Position and orientation of rigid bodies
 Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Partial Fractions. June 27, In this section, we will learn to integrate another class of functions: the rational functions.
 Partial Fractions June 7, 04 In this section, we will learn to integrate another class of functions: the rational functions. Definition. A rational function is a fraction of two polynomials. For example,
Partial Fractions June 7, 04 In this section, we will learn to integrate another class of functions: the rational functions. Definition. A rational function is a fraction of two polynomials. For example,
Displacement Analysis of Spherical Mechanisms Having Three or Fewer Loops
 Charles W. Wampler General Motors R&D Center, Mail Code 480-106-359, 30500 Mound Road, Warren, MI 48090-9055 e-mail: charles.w.wampler@gm.com Displacement Analysis of Spherical Mechanisms Having Three
Charles W. Wampler General Motors R&D Center, Mail Code 480-106-359, 30500 Mound Road, Warren, MI 48090-9055 e-mail: charles.w.wampler@gm.com Displacement Analysis of Spherical Mechanisms Having Three
8 Velocity Kinematics
 8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
Numerical Computations in Algebraic Geometry. Jan Verschelde
 Numerical Computations in Algebraic Geometry Jan Verschelde University of Illinois at Chicago Department of Mathematics, Statistics, and Computer Science http://www.math.uic.edu/ jan jan@math.uic.edu AMS
Numerical Computations in Algebraic Geometry Jan Verschelde University of Illinois at Chicago Department of Mathematics, Statistics, and Computer Science http://www.math.uic.edu/ jan jan@math.uic.edu AMS
3 Applications of partial differentiation
 Advanced Calculus Chapter 3 Applications of partial differentiation 37 3 Applications of partial differentiation 3.1 Stationary points Higher derivatives Let U R 2 and f : U R. The partial derivatives
Advanced Calculus Chapter 3 Applications of partial differentiation 37 3 Applications of partial differentiation 3.1 Stationary points Higher derivatives Let U R 2 and f : U R. The partial derivatives
Math review. Math review
 Math review 1 Math review 3 1 series approximations 3 Taylor s Theorem 3 Binomial approximation 3 sin(x), for x in radians and x close to zero 4 cos(x), for x in radians and x close to zero 5 2 some geometry
Math review 1 Math review 3 1 series approximations 3 Taylor s Theorem 3 Binomial approximation 3 sin(x), for x in radians and x close to zero 4 cos(x), for x in radians and x close to zero 5 2 some geometry
Math 005A Prerequisite Material Answer Key
 Math 005A Prerequisite Material Answer Key 1. a) P = 4s (definition of perimeter and square) b) P = l + w (definition of perimeter and rectangle) c) P = a + b + c (definition of perimeter and triangle)
Math 005A Prerequisite Material Answer Key 1. a) P = 4s (definition of perimeter and square) b) P = l + w (definition of perimeter and rectangle) c) P = a + b + c (definition of perimeter and triangle)
A Plane Symmetric 6R Foldable Ring
 A Plane Symmetric 6R Foldable Ring A.D. Viquerat a,, T. Hutt b, S.D. Guest a, a Department of Engineering, University of Cambridge, Trumpington Street, Cambridge CB2 1PZ, UK b Department of Mechanical
A Plane Symmetric 6R Foldable Ring A.D. Viquerat a,, T. Hutt b, S.D. Guest a, a Department of Engineering, University of Cambridge, Trumpington Street, Cambridge CB2 1PZ, UK b Department of Mechanical
Formulas to remember
 Complex numbers Let z = x + iy be a complex number The conjugate z = x iy Formulas to remember The real part Re(z) = x = z+z The imaginary part Im(z) = y = z z i The norm z = zz = x + y The reciprocal
Complex numbers Let z = x + iy be a complex number The conjugate z = x iy Formulas to remember The real part Re(z) = x = z+z The imaginary part Im(z) = y = z z i The norm z = zz = x + y The reciprocal
Vectors for Physics. AP Physics C
 Vectors for Physics AP Physics C A Vector is a quantity that has a magnitude (size) AND a direction. can be in one-dimension, two-dimensions, or even three-dimensions can be represented using a magnitude
Vectors for Physics AP Physics C A Vector is a quantity that has a magnitude (size) AND a direction. can be in one-dimension, two-dimensions, or even three-dimensions can be represented using a magnitude
Calculus. Integration (III)
") Calculus Integration (III) Outline 1 Other Techniques of Integration Partial Fractions Integrals Involving Powers of Trigonometric Functions Trigonometric Substitution 2 Using Tables of Integrals Integration
Calculus Integration (III) Outline 1 Other Techniques of Integration Partial Fractions Integrals Involving Powers of Trigonometric Functions Trigonometric Substitution 2 Using Tables of Integrals Integration
1. Use the properties of exponents to simplify the following expression, writing your answer with only positive exponents.
 Math120 - Precalculus. Final Review. Fall, 2011 Prepared by Dr. P. Babaali 1 Algebra 1. Use the properties of exponents to simplify the following expression, writing your answer with only positive exponents.
Math120 - Precalculus. Final Review. Fall, 2011 Prepared by Dr. P. Babaali 1 Algebra 1. Use the properties of exponents to simplify the following expression, writing your answer with only positive exponents.
Solving equations UNCORRECTED PAGE PROOFS
 1 Solving equations 1.1 Kick off with CAS 1. Polynomials 1.3 Trigonometric symmetry properties 1.4 Trigonometric equations and general solutions 1.5 Literal equations and simultaneous equations 1.6 Review
1 Solving equations 1.1 Kick off with CAS 1. Polynomials 1.3 Trigonometric symmetry properties 1.4 Trigonometric equations and general solutions 1.5 Literal equations and simultaneous equations 1.6 Review
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS
 ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
Chapter 4: Higher-Order Differential Equations Part 1
 Chapter 4: Higher-Order Differential Equations Part 1 王奕翔 Department of Electrical Engineering National Taiwan University ihwang@ntu.edu.tw October 8, 2013 Higher-Order Differential Equations Most of this
Chapter 4: Higher-Order Differential Equations Part 1 王奕翔 Department of Electrical Engineering National Taiwan University ihwang@ntu.edu.tw October 8, 2013 Higher-Order Differential Equations Most of this
2. Algebraic functions, power functions, exponential functions, trig functions
 Math, Prep: Familiar Functions (.,.,.5, Appendix D) Name: Names of collaborators: Main Points to Review:. Functions, models, graphs, tables, domain and range. Algebraic functions, power functions, exponential
Math, Prep: Familiar Functions (.,.,.5, Appendix D) Name: Names of collaborators: Main Points to Review:. Functions, models, graphs, tables, domain and range. Algebraic functions, power functions, exponential
Classical Mechanics. Luis Anchordoqui
 1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
1 Rigid Body Motion Inertia Tensor Rotational Kinetic Energy Principal Axes of Rotation Steiner s Theorem Euler s Equations for a Rigid Body Eulerian Angles Review of Fundamental Equations 2 Rigid body
SOLVED PROBLEMS ON TAYLOR AND MACLAURIN SERIES
 SOLVED PROBLEMS ON TAYLOR AND MACLAURIN SERIES TAYLOR AND MACLAURIN SERIES Taylor Series of a function f at x = a is ( f k )( a) ( x a) k k! It is a Power Series centered at a. Maclaurin Series of a function
SOLVED PROBLEMS ON TAYLOR AND MACLAURIN SERIES TAYLOR AND MACLAURIN SERIES Taylor Series of a function f at x = a is ( f k )( a) ( x a) k k! It is a Power Series centered at a. Maclaurin Series of a function
MATH 15a: Linear Algebra Exam 1, Solutions
 MATH 5a: Linear Algebra Exam, Solutions. Let T : R 3 R 4 be the linear transformation with T( e ) = 2 e + e 2 + 3 e 3 4 e 4, T( e 2 ) = e e 2 +2 e 3 +6 e 4, and T( e 3 ) = 4 e e 2 +7 e 3 +8 e 4. (a) (6
MATH 5a: Linear Algebra Exam, Solutions. Let T : R 3 R 4 be the linear transformation with T( e ) = 2 e + e 2 + 3 e 3 4 e 4, T( e 2 ) = e e 2 +2 e 3 +6 e 4, and T( e 3 ) = 4 e e 2 +7 e 3 +8 e 4. (a) (6
Derivatives and Integrals
 Derivatives and Integrals Definition 1: Derivative Formulas d dx (c) = 0 d dx (f ± g) = f ± g d dx (kx) = k d dx (xn ) = nx n 1 (f g) = f g + fg ( ) f = f g fg g g 2 (f(g(x))) = f (g(x)) g (x) d dx (ax
Derivatives and Integrals Definition 1: Derivative Formulas d dx (c) = 0 d dx (f ± g) = f ± g d dx (kx) = k d dx (xn ) = nx n 1 (f g) = f g + fg ( ) f = f g fg g g 2 (f(g(x))) = f (g(x)) g (x) d dx (ax
Numerical Irreducible Decomposition
 Numerical Irreducible Decomposition Jan Verschelde Department of Math, Stat & CS University of Illinois at Chicago Chicago, IL 60607-7045, USA e-mail: jan@math.uic.edu web: www.math.uic.edu/ jan CIMPA
Numerical Irreducible Decomposition Jan Verschelde Department of Math, Stat & CS University of Illinois at Chicago Chicago, IL 60607-7045, USA e-mail: jan@math.uic.edu web: www.math.uic.edu/ jan CIMPA
1. Projective geometry
 1. Projective geometry Homogeneous representation of points and lines in D space D projective space Points at infinity and the line at infinity Conics and dual conics Projective transformation Hierarchy
1. Projective geometry Homogeneous representation of points and lines in D space D projective space Points at infinity and the line at infinity Conics and dual conics Projective transformation Hierarchy
CALCULUS ASSESSMENT REVIEW
 CALCULUS ASSESSMENT REVIEW DEPARTMENT OF MATHEMATICS CHRISTOPHER NEWPORT UNIVERSITY 1. Introduction and Topics The purpose of these notes is to give an idea of what to expect on the Calculus Readiness
CALCULUS ASSESSMENT REVIEW DEPARTMENT OF MATHEMATICS CHRISTOPHER NEWPORT UNIVERSITY 1. Introduction and Topics The purpose of these notes is to give an idea of what to expect on the Calculus Readiness
Eigenvalues and Eigenvectors
 LECTURE 3 Eigenvalues and Eigenvectors Definition 3.. Let A be an n n matrix. The eigenvalue-eigenvector problem for A is the problem of finding numbers λ and vectors v R 3 such that Av = λv. If λ, v are
LECTURE 3 Eigenvalues and Eigenvectors Definition 3.. Let A be an n n matrix. The eigenvalue-eigenvector problem for A is the problem of finding numbers λ and vectors v R 3 such that Av = λv. If λ, v are
HOMEWORK PROBLEMS FROM STRANG S LINEAR ALGEBRA AND ITS APPLICATIONS (4TH EDITION)
") HOMEWORK PROBLEMS FROM STRANG S LINEAR ALGEBRA AND ITS APPLICATIONS (4TH EDITION) PROFESSOR STEVEN MILLER: BROWN UNIVERSITY: SPRING 2007 1. CHAPTER 1: MATRICES AND GAUSSIAN ELIMINATION Page 9, # 3: Describe
HOMEWORK PROBLEMS FROM STRANG S LINEAR ALGEBRA AND ITS APPLICATIONS (4TH EDITION) PROFESSOR STEVEN MILLER: BROWN UNIVERSITY: SPRING 2007 1. CHAPTER 1: MATRICES AND GAUSSIAN ELIMINATION Page 9, # 3: Describe
DETC MECHANISM BRANCHES, TURNING CURVES, AND CRITICAL POINTS
 Proceedings of IDETC/CIE 01 ASME 01 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference August 1-15, 01, Chicago, Illinois, USA DETC01-7077 MECHANISM
Proceedings of IDETC/CIE 01 ASME 01 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference August 1-15, 01, Chicago, Illinois, USA DETC01-7077 MECHANISM
Review session Midterm 1
 AS.110.109: Calculus II (Eng) Review session Midterm 1 Yi Wang, Johns Hopkins University Fall 2018 7.1: Integration by parts Basic integration method: u-sub, integration table Integration By Parts formula
AS.110.109: Calculus II (Eng) Review session Midterm 1 Yi Wang, Johns Hopkins University Fall 2018 7.1: Integration by parts Basic integration method: u-sub, integration table Integration By Parts formula
Singular Foci of Planar Linkages
 Singular Foci of Planar Linkages Charles W. Wampler General Motors Research & Development, Mail Code 480-106-359, 30500 Mound Road, Warren, MI 48090-9055, USA Abstract The focal points of a curve traced
Singular Foci of Planar Linkages Charles W. Wampler General Motors Research & Development, Mail Code 480-106-359, 30500 Mound Road, Warren, MI 48090-9055, USA Abstract The focal points of a curve traced
Maxima and Minima. (a, b) of R if
 of R if") Maxima and Minima Definition Let R be any region on the xy-plane, a function f (x, y) attains its absolute or global, maximum value M on R at the point (a, b) of R if (i) f (x, y) M for all points (x,
Maxima and Minima Definition Let R be any region on the xy-plane, a function f (x, y) attains its absolute or global, maximum value M on R at the point (a, b) of R if (i) f (x, y) M for all points (x,
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
Pose estimation from point and line correspondences
 Pose estimation from point and line correspondences Giorgio Panin October 17, 008 1 Problem formulation Estimate (in a LSE sense) the pose of an object from N correspondences between known object points
Pose estimation from point and line correspondences Giorgio Panin October 17, 008 1 Problem formulation Estimate (in a LSE sense) the pose of an object from N correspondences between known object points
Further Mathematical Methods (Linear Algebra) 2002
 2002") Further Mathematical Methods (Linear Algebra) Solutions For Problem Sheet 9 In this problem sheet, we derived a new result about orthogonal projections and used them to find least squares approximations
Further Mathematical Methods (Linear Algebra) Solutions For Problem Sheet 9 In this problem sheet, we derived a new result about orthogonal projections and used them to find least squares approximations
Math 1060 Linear Algebra Homework Exercises 1 1. Find the complete solutions (if any!) to each of the following systems of simultaneous equations:
 to each of the following systems of simultaneous equations:") Homework Exercises 1 1 Find the complete solutions (if any!) to each of the following systems of simultaneous equations: (i) x 4y + 3z = 2 3x 11y + 13z = 3 2x 9y + 2z = 7 x 2y + 6z = 2 (ii) x 4y + 3z =
Homework Exercises 1 1 Find the complete solutions (if any!) to each of the following systems of simultaneous equations: (i) x 4y + 3z = 2 3x 11y + 13z = 3 2x 9y + 2z = 7 x 2y + 6z = 2 (ii) x 4y + 3z =
Kinematic Analysis of a Pentapod Robot
 Journal for Geometry and Graphics Volume 10 (2006), No. 2, 173 182. Kinematic Analysis of a Pentapod Robot Gert F. Bär and Gunter Weiß Dresden University of Technology Institute for Geometry, D-01062 Dresden,
Journal for Geometry and Graphics Volume 10 (2006), No. 2, 173 182. Kinematic Analysis of a Pentapod Robot Gert F. Bär and Gunter Weiß Dresden University of Technology Institute for Geometry, D-01062 Dresden,
Differential Kinematics
 Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
OR MSc Maths Revision Course
 OR MSc Maths Revision Course Tom Byrne School of Mathematics University of Edinburgh t.m.byrne@sms.ed.ac.uk 15 September 2017 General Information Today JCMB Lecture Theatre A, 09:30-12:30 Mathematics revision
OR MSc Maths Revision Course Tom Byrne School of Mathematics University of Edinburgh t.m.byrne@sms.ed.ac.uk 15 September 2017 General Information Today JCMB Lecture Theatre A, 09:30-12:30 Mathematics revision
Algebra I. Book 2. Powered by...
 Algebra I Book 2 Powered by... ALGEBRA I Units 4-7 by The Algebra I Development Team ALGEBRA I UNIT 4 POWERS AND POLYNOMIALS......... 1 4.0 Review................ 2 4.1 Properties of Exponents..........
Algebra I Book 2 Powered by... ALGEBRA I Units 4-7 by The Algebra I Development Team ALGEBRA I UNIT 4 POWERS AND POLYNOMIALS......... 1 4.0 Review................ 2 4.1 Properties of Exponents..........
REQUIRED MATHEMATICAL SKILLS FOR ENTERING CADETS
 REQUIRED MATHEMATICAL SKILLS FOR ENTERING CADETS The Department of Applied Mathematics administers a Math Placement test to assess fundamental skills in mathematics that are necessary to begin the study
REQUIRED MATHEMATICAL SKILLS FOR ENTERING CADETS The Department of Applied Mathematics administers a Math Placement test to assess fundamental skills in mathematics that are necessary to begin the study
Higher-order ordinary differential equations
 Higher-order ordinary differential equations 1 A linear ODE of general order n has the form a n (x) dn y dx n +a n 1(x) dn 1 y dx n 1 + +a 1(x) dy dx +a 0(x)y = f(x). If f(x) = 0 then the equation is called
Higher-order ordinary differential equations 1 A linear ODE of general order n has the form a n (x) dn y dx n +a n 1(x) dn 1 y dx n 1 + +a 1(x) dy dx +a 0(x)y = f(x). If f(x) = 0 then the equation is called
Book 4. June 2013 June 2014 June Name :
 Book 4 June 2013 June 2014 June 2015 Name : June 2013 1. Given that 4 3 2 2 ax bx c 2 2 3x 2x 5x 4 dxe x 4 x 4, x 2 find the values of the constants a, b, c, d and e. 2. Given that f(x) = ln x, x > 0 sketch
Book 4 June 2013 June 2014 June 2015 Name : June 2013 1. Given that 4 3 2 2 ax bx c 2 2 3x 2x 5x 4 dxe x 4 x 4, x 2 find the values of the constants a, b, c, d and e. 2. Given that f(x) = ln x, x > 0 sketch
DEPARTMENT OF MATHEMATICS
 DEPARTMENT OF MATHEMATICS A2 level Mathematics Core 3 course workbook 2015-2016 Name: Welcome to Core 3 (C3) Mathematics. We hope that you will use this workbook to give you an organised set of notes for
DEPARTMENT OF MATHEMATICS A2 level Mathematics Core 3 course workbook 2015-2016 Name: Welcome to Core 3 (C3) Mathematics. We hope that you will use this workbook to give you an organised set of notes for
24. x 2 y xy y sec(ln x); 1 e x y 1 cos(ln x), y 2 sin(ln x) 25. y y tan x 26. y 4y sec 2x 28.
; 1 e x y 1 cos(ln x), y 2 sin(ln x) 25. y y tan x 26. y 4y sec 2x 28.") 16 CHAPTER 4 HIGHER-ORDER DIFFERENTIAL EQUATIONS 11. y 3y y 1 4. x yxyy sec(ln x); 1 e x y 1 cos(ln x), y sin(ln x) ex 1. y y y 1 x 13. y3yy sin e x 14. yyy e t arctan t 15. yyy e t ln t 16. y y y 41x
16 CHAPTER 4 HIGHER-ORDER DIFFERENTIAL EQUATIONS 11. y 3y y 1 4. x yxyy sec(ln x); 1 e x y 1 cos(ln x), y sin(ln x) ex 1. y y y 1 x 13. y3yy sin e x 14. yyy e t arctan t 15. yyy e t ln t 16. y y y 41x
1. Use the properties of exponents to simplify the following expression, writing your answer with only positive exponents.
 Math120 - Precalculus. Final Review Prepared by Dr. P. Babaali 1 Algebra 1. Use the properties of exponents to simplify the following expression, writing your answer with only positive exponents. (a) 5
Math120 - Precalculus. Final Review Prepared by Dr. P. Babaali 1 Algebra 1. Use the properties of exponents to simplify the following expression, writing your answer with only positive exponents. (a) 5
Suggested Time Frame (Block) Review 1.1 Functions 1. Text Section. Section Name
 Review 1.1 Functions 1. Text Section. Section Name") Date Taught Objective Subsets of real numbers, evaluate functions and state Finding y-intercepts, zeros, & symmetry GADSDEN CITY CURRICULUM GUIDE ESSENTIAL CONTENT AND SKILLS ANALYTICAL MATHEMATICS Text
Date Taught Objective Subsets of real numbers, evaluate functions and state Finding y-intercepts, zeros, & symmetry GADSDEN CITY CURRICULUM GUIDE ESSENTIAL CONTENT AND SKILLS ANALYTICAL MATHEMATICS Text
Lesson 7: Algebraic Expressions The Commutative and Associative Properties
 : Algebraic Expressions The Commutative and Associative Properties Four Properties of Arithmetic: The Commutative Property of Addition: If a and b are real numbers, then a + b = b + a. The Associative
: Algebraic Expressions The Commutative and Associative Properties Four Properties of Arithmetic: The Commutative Property of Addition: If a and b are real numbers, then a + b = b + a. The Associative
Topic 7: Polynomials. Introduction to Polynomials. Table of Contents. Vocab. Degree of a Polynomial. Vocab. A. 11x 7 + 3x 3
 Topic 7: Polynomials Table of Contents 1. Introduction to Polynomials. Adding & Subtracting Polynomials 3. Multiplying Polynomials 4. Special Products of Binomials 5. Factoring Polynomials 6. Factoring
Topic 7: Polynomials Table of Contents 1. Introduction to Polynomials. Adding & Subtracting Polynomials 3. Multiplying Polynomials 4. Special Products of Binomials 5. Factoring Polynomials 6. Factoring
3. ANALYTICAL KINEMATICS
 In planar mechanisms, kinematic analysis can be performed either analytically or graphically In this course we first discuss analytical kinematic analysis nalytical kinematics is based on projecting the
In planar mechanisms, kinematic analysis can be performed either analytically or graphically In this course we first discuss analytical kinematic analysis nalytical kinematics is based on projecting the
Chapter 3. Reading assignment: In this chapter we will cover Sections dx 1 + a 0(x)y(x) = g(x). (1)
y(x) = g(x). (1)") Chapter 3 3 Introduction Reading assignment: In this chapter we will cover Sections 3.1 3.6. 3.1 Theory of Linear Equations Recall that an nth order Linear ODE is an equation that can be written in the
Chapter 3 3 Introduction Reading assignment: In this chapter we will cover Sections 3.1 3.6. 3.1 Theory of Linear Equations Recall that an nth order Linear ODE is an equation that can be written in the
TECHNICAL RESEARCH REPORT
 TECHNICAL RESEARCH REPORT A Parallel Manipulator with Only Translational Degrees of Freedom by Lung-Wen Tsai, Richard E. Stamper T.R. 97-72 ISR INSTITUTE FOR SYSTEMS RESEARCH Sponsored by the National
TECHNICAL RESEARCH REPORT A Parallel Manipulator with Only Translational Degrees of Freedom by Lung-Wen Tsai, Richard E. Stamper T.R. 97-72 ISR INSTITUTE FOR SYSTEMS RESEARCH Sponsored by the National
Robotics I. February 6, 2014
 Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
CURRICULUM GUIDE. Honors Algebra II / Trigonometry
 CURRICULUM GUIDE Honors Algebra II / Trigonometry The Honors course is fast-paced, incorporating the topics of Algebra II/ Trigonometry plus some topics of the pre-calculus course. More emphasis is placed
CURRICULUM GUIDE Honors Algebra II / Trigonometry The Honors course is fast-paced, incorporating the topics of Algebra II/ Trigonometry plus some topics of the pre-calculus course. More emphasis is placed
MECH 314 Dynamics of Mechanisms February 17, 2011 Offset Slider Crank Analysis and Some Other Slider Systems
 MCH 314 ynamics of Mechanisms February 17, 011 ffset Slider Crank nalysis and Some ther Slider Systems 1 ffset Slider Crank Position nalysis Position and velocity analysis for the common slider-crank has
MCH 314 ynamics of Mechanisms February 17, 011 ffset Slider Crank nalysis and Some ther Slider Systems 1 ffset Slider Crank Position nalysis Position and velocity analysis for the common slider-crank has
Summer Review for Students Entering AP Calculus AB
 Summer Review for Students Entering AP Calculus AB Class: Date: AP Calculus AB Summer Packet Please show all work in the spaces provided The answers are provided at the end of the packet Algebraic Manipulation
Summer Review for Students Entering AP Calculus AB Class: Date: AP Calculus AB Summer Packet Please show all work in the spaces provided The answers are provided at the end of the packet Algebraic Manipulation
18.06 Problem Set 1 Solutions Due Thursday, 11 February 2010 at 4 pm in Total: 100 points
 18.06 Problem Set 1 Solutions Due Thursday, 11 February 2010 at 4 pm in 2-106. Total: 100 points Section 1.2. Problem 23: The figure shows that cos(α) = v 1 / v and sin(α) = v 2 / v. Similarly cos(β) is
18.06 Problem Set 1 Solutions Due Thursday, 11 February 2010 at 4 pm in 2-106. Total: 100 points Section 1.2. Problem 23: The figure shows that cos(α) = v 1 / v and sin(α) = v 2 / v. Similarly cos(β) is
2014 Summer Review for Students Entering Algebra 2. TI-84 Plus Graphing Calculator is required for this course.
 1. Solving Linear Equations 2. Solving Linear Systems of Equations 3. Multiplying Polynomials and Solving Quadratics 4. Writing the Equation of a Line 5. Laws of Exponents and Scientific Notation 6. Solving
1. Solving Linear Equations 2. Solving Linear Systems of Equations 3. Multiplying Polynomials and Solving Quadratics 4. Writing the Equation of a Line 5. Laws of Exponents and Scientific Notation 6. Solving
ADVANCED TOPICS IN ALGEBRAIC GEOMETRY
 ADVANCED TOPICS IN ALGEBRAIC GEOMETRY DAVID WHITE Outline of talk: My goal is to introduce a few more advanced topics in algebraic geometry but not to go into too much detail. This will be a survey of
ADVANCED TOPICS IN ALGEBRAIC GEOMETRY DAVID WHITE Outline of talk: My goal is to introduce a few more advanced topics in algebraic geometry but not to go into too much detail. This will be a survey of
Rotation of Axes. By: OpenStaxCollege
 Rotation of Axes By: OpenStaxCollege As we have seen, conic sections are formed when a plane intersects two right circular cones aligned tip to tip and extending infinitely far in opposite directions,
Rotation of Axes By: OpenStaxCollege As we have seen, conic sections are formed when a plane intersects two right circular cones aligned tip to tip and extending infinitely far in opposite directions,
On a Rigid Body Subject to Point-Plane Constraints
 On a Rigid Body Subject to Point-Plane Constraints Charles W. Wampler General Motors R&D Center Mail Code 480-106-359 30500 Mound Road Warren, MI 48090-9055 E-mail: charles.w.wampler@gm.com Paper MD-05-1167
On a Rigid Body Subject to Point-Plane Constraints Charles W. Wampler General Motors R&D Center Mail Code 480-106-359 30500 Mound Road Warren, MI 48090-9055 E-mail: charles.w.wampler@gm.com Paper MD-05-1167
Dimensional Synthesis of Bennett Linkages
 Dimensional Synthesis of Bennett Linkages DETC 00 000 ASME Design Engineering Technical Conferences 10-13 September 000 Baltimore, Maryland, USA Alba Perez (maperez@uci.edu), J. M. McCarthy (jmmccart@uci.edu)
Dimensional Synthesis of Bennett Linkages DETC 00 000 ASME Design Engineering Technical Conferences 10-13 September 000 Baltimore, Maryland, USA Alba Perez (maperez@uci.edu), J. M. McCarthy (jmmccart@uci.edu)
STATE COUNCIL OF EDUCATIONAL RESEARCH AND TRAINING TNCF DRAFT SYLLABUS.
 STATE COUNCIL OF EDUCATIONAL RESEARCH AND TRAINING TNCF 2017 - DRAFT SYLLABUS Subject :Mathematics Class : XI TOPIC CONTENT Unit 1 : Real Numbers - Revision : Rational, Irrational Numbers, Basic Algebra
STATE COUNCIL OF EDUCATIONAL RESEARCH AND TRAINING TNCF 2017 - DRAFT SYLLABUS Subject :Mathematics Class : XI TOPIC CONTENT Unit 1 : Real Numbers - Revision : Rational, Irrational Numbers, Basic Algebra
b n x n + b n 1 x n b 1 x + b 0
 Math Partial Fractions Stewart 7.4 Integrating basic rational functions. For a function f(x), we have examined several algebraic methods for finding its indefinite integral (antiderivative) F (x) = f(x)
Math Partial Fractions Stewart 7.4 Integrating basic rational functions. For a function f(x), we have examined several algebraic methods for finding its indefinite integral (antiderivative) F (x) = f(x)
CITY UNIVERSITY. London
 611.51 CITY UNIVERSITY London BSc Honours Degrees in Mathematical Science BSc Honours Degree in Mathematical Science with Finance and Economics BSc Honours Degree in Actuarial Science BSc Honours Degree
611.51 CITY UNIVERSITY London BSc Honours Degrees in Mathematical Science BSc Honours Degree in Mathematical Science with Finance and Economics BSc Honours Degree in Actuarial Science BSc Honours Degree
SOLUTIONS FOR PRACTICE FINAL EXAM
 SOLUTIONS FOR PRACTICE FINAL EXAM ANDREW J. BLUMBERG. Solutions () Short answer questions: (a) State the mean value theorem. Proof. The mean value theorem says that if f is continuous on (a, b) and differentiable
SOLUTIONS FOR PRACTICE FINAL EXAM ANDREW J. BLUMBERG. Solutions () Short answer questions: (a) State the mean value theorem. Proof. The mean value theorem says that if f is continuous on (a, b) and differentiable
Introduction to Mobile Robotics Compact Course on Linear Algebra. Wolfram Burgard, Bastian Steder
 Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Bastian Steder Reference Book Thrun, Burgard, and Fox: Probabilistic Robotics Vectors Arrays of numbers Vectors represent
Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Bastian Steder Reference Book Thrun, Burgard, and Fox: Probabilistic Robotics Vectors Arrays of numbers Vectors represent
CALCULUS JIA-MING (FRANK) LIOU
 LIOU") CALCULUS JIA-MING (FRANK) LIOU Abstract. Contents. Power Series.. Polynomials and Formal Power Series.2. Radius of Convergence 2.3. Derivative and Antiderivative of Power Series 4.4. Power Series Expansion
CALCULUS JIA-MING (FRANK) LIOU Abstract. Contents. Power Series.. Polynomials and Formal Power Series.2. Radius of Convergence 2.3. Derivative and Antiderivative of Power Series 4.4. Power Series Expansion
Second-Order Linear ODEs
 C0.tex /4/011 16: 3 Page 13 Chap. Second-Order Linear ODEs Chapter presents different types of second-order ODEs and the specific techniques on how to solve them. The methods are systematic, but it requires
C0.tex /4/011 16: 3 Page 13 Chap. Second-Order Linear ODEs Chapter presents different types of second-order ODEs and the specific techniques on how to solve them. The methods are systematic, but it requires
LECTURE 5, FRIDAY
 LECTURE 5, FRIDAY 20.02.04 FRANZ LEMMERMEYER Before we start with the arithmetic of elliptic curves, let us talk a little bit about multiplicities, tangents, and singular points. 1. Tangents How do we
LECTURE 5, FRIDAY 20.02.04 FRANZ LEMMERMEYER Before we start with the arithmetic of elliptic curves, let us talk a little bit about multiplicities, tangents, and singular points. 1. Tangents How do we
Direct Position Analysis of a Large Family of Spherical and Planar Parallel Manipulators with Four Loops
 Proceedings of the Second International Workshop on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators September 1, 8, Montpellier, France N. Andreff, O. Company,
Proceedings of the Second International Workshop on Fundamental Issues and Future Research Directions for Parallel Mechanisms and Manipulators September 1, 8, Montpellier, France N. Andreff, O. Company,
Kinematic analysis of Active Ankle using computational algebraic geometry
 Kinematic analysis of Active Ankle using computational algebraic geometry Shivesh Kumar 1a, Abhilash Nayak, Bertold Bongardt 1a, Andreas Mueller 3 and Frank Kirchner 1ab 1a Robotics Innovation Center,
Kinematic analysis of Active Ankle using computational algebraic geometry Shivesh Kumar 1a, Abhilash Nayak, Bertold Bongardt 1a, Andreas Mueller 3 and Frank Kirchner 1ab 1a Robotics Innovation Center,
Things You Should Know Coming Into Calc I
 Things You Should Know Coming Into Calc I Algebraic Rules, Properties, Formulas, Ideas and Processes: 1) Rules and Properties of Exponents. Let x and y be positive real numbers, let a and b represent real
Things You Should Know Coming Into Calc I Algebraic Rules, Properties, Formulas, Ideas and Processes: 1) Rules and Properties of Exponents. Let x and y be positive real numbers, let a and b represent real
Winter 2017 Ma 1b Analytical Problem Set 2 Solutions
 1. (5 pts) From Ch. 1.10 in Apostol: Problems 1,3,5,7,9. Also, when appropriate exhibit a basis for S. Solution. (1.10.1) Yes, S is a subspace of V 3 with basis {(0, 0, 1), (0, 1, 0)} and dimension 2.
1. (5 pts) From Ch. 1.10 in Apostol: Problems 1,3,5,7,9. Also, when appropriate exhibit a basis for S. Solution. (1.10.1) Yes, S is a subspace of V 3 with basis {(0, 0, 1), (0, 1, 0)} and dimension 2.
computing an irreducible decomposition of A B looking for solutions where the Jacobian drops rank
 Diagonal Homotopies 1 Intersecting Solution Sets computing an irreducible decomposition of A B 2 The Singular Locus looking for solutions where the Jacobian drops rank 3 Solving Systems restricted to an
Diagonal Homotopies 1 Intersecting Solution Sets computing an irreducible decomposition of A B 2 The Singular Locus looking for solutions where the Jacobian drops rank 3 Solving Systems restricted to an