MEAM 520. More Velocity Kinematics
|
|
|
- Allen Wilkins
- 5 years ago
- Views:
Transcription

 MEAM Department, SEAS,")
1 MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October 18, 2012
2
3
4
5
6

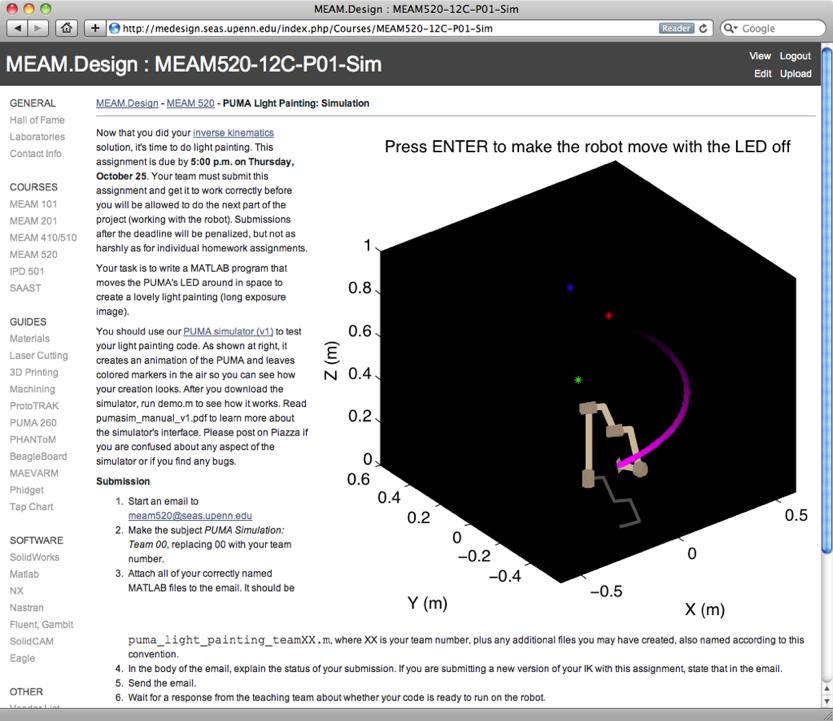
7 Project 1 : PUMA Light Painting
8
9
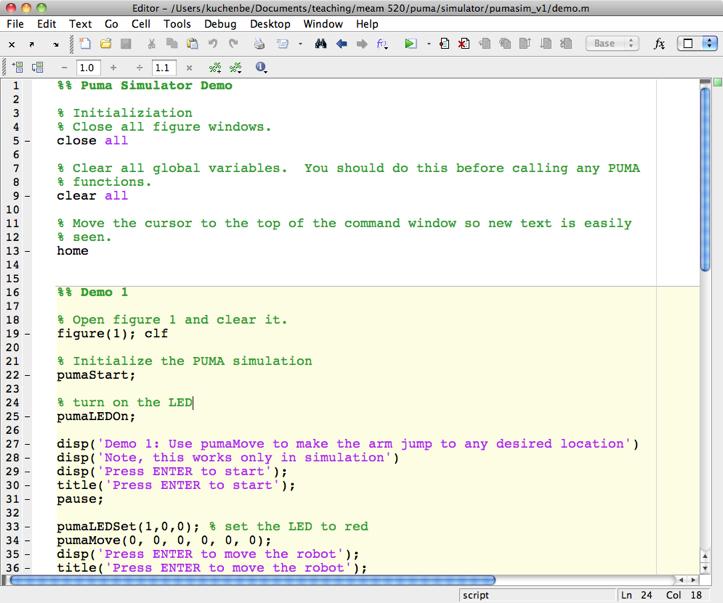
10 RUNNING THE PUMA The basic work flow when using the PUMA 260 arm is 1. Make sure the Emergency Stop (E-stop) button is engaged (pressed down). 2. Call!"#$%&$'&()*$'+,$'-)./)01)./)2-3$4)./567, where the number following delay is the minimum allowable time, in milliseconds, between calls to!"#$%-'80. This may be set to any value above 0.5ms. This will display a warning that the PUMA will return to the home position. Ensure that the workspace is clear and manually move the PUMA closer to the home position if you think it may hit the table or an object. 3. Type 'y' or 'yes' then hit Enter to continue. 4. Release the E-stop by pulling up on the button, at which time the PUMA will return to the home position. 5. In a separate MATLAB process, call 9&$'&:'$#-;"<<-' to begin capturing video from the webcam. 6. Make a light painting, using!"#$%-'80 to command the robot to move. Remember to call!"#$=>2?1 to enable the LED and use!"#$=>2%-& to select the color. 7. Call 9&0!:'$#-;"<<-' to finish capturing video. 8. Return the PUMA to the home position, if possible. 9. Call!"#$%&0! to disable the controller. 10. Engage the E-stop by pressing the button down. 11. Use #$@-AB+-0C1+D#$E- to create long-exposure picture and video. Optionally, you may wish to save the image files to a different location using 9$8-D#$E-9F0:03+-' before starting a new video. There are several other things to keep in mind: Do NOT use the G3-$'/$33 command once the PUMA has been initialized before calling!"#$%&0!, otherwise MATLAB will crash. Test the video capture before running your whole light painting.

11
12 Confirmed Midterm Date Thursday, November 8, in class ~ KJK if you have a severe conflict ~


13 Velocity Kinematics Slides created by Jonathan Fiene
14 How do the velocities of the joints affect the linear and angular velocity of the end-effector? These quantities are related by the Jacobian, a matrix that generalizes the notion of an ordinary derivative of a scalar function. Jacobians are useful for planning and executing smooth trajectories, determining singular configurations, executing coordinated anthropomorphic motion, deriving dynamic equations of motion, and transforming forces and torques from the end-effector to the manipulator joints.
15 The Manipulator Jacobian explore how changes in joint values affect the end-effector movement could have N joints, but only six end-effector velocity terms (xyzpts) The Jacobian matrix lets us calculate how joint velocities translate into end-effector velocities (depends on configuration) look at it in two parts - position and orientation How do we calculate the position Jacobian?
16 ṗ = J p (q) q endpoint velocity joint velocity Jacobian matrix J p = δx δq 1 δy δq 1 δz δq 1 δx... δx δq 2 δq n δy δq 2... δy δq n δz... δz δq 2 δq n Prismatic Revolute
17 A Use for the Position Jacobian What joint velocities should I choose to cause a desired end-effector velocity? (inverse velocity kinematics) This works only when the Jacobian is square and invertible (non-singular). SHV 4.11 explains what to do when the Jacobian is not square: rank test (v is in range of J) use J + (right pseudoinverse of J) when the robot has extra joints, there are many solutions
18 Singularities Singularities are points in the configuration space where infinitesimal motion in a certain direction is not possible and the manipulator loses one or more degrees of freedom Mathematically, singularities exist at any point in the workspace where the Jacobian matrix loses rank. a matrix is singular if and only if its determinant is zero: det(j) =0
19 Position Singularities : Planar RR d 0 2 = a 2c 12 + a 1 c 1 a 2 s 12 + a 1 s 1 0 (x, y) J = [ ] a1 s 1 a 2 s 12 a 2 s 12 a 1 c 1 + a 2 c 12 a 2 c 12 a 2 θ 2 a 1 θ 1
20 Position Singularities : Planar RR For θ 2 =0 The Jacobian collapses to have linearly dependent rows [ ] a1 s J θ2 =0 = 1 a 2 s 1 a 2 s 1 a 1 c 1 + a 2 c 1 a 2 c 1 a 2 (x, y) This means that actuating either joint causes motion in the same direction a 1 θ 2 θ 1
21 Questions?
22 The Manipulator Jacobian explore how changes in joint values affect the end-effector movement could have N joints, but only six end-effector velocity terms (xyzpts) The Jacobian matrix lets us calculate how joint velocities translate into end-effector velocities (depends on configuration) look at it in two parts - position and orientation How do we calculate the orientation Jacobian?
23 And now, angular velocity ω = J ω (q) q final frame angular velocity joint velocities
24 A Note about Notation ω k i,j this is the angular velocity of frame j with respect to frame i, expressed in frame k SHV 4.1 gives a good explanation of angular velocity for fixed-axis rotation. SHV go into greater detail.
25 The Angular Velocity of Connected Rigid Bodies ω 0 0,1 =0ˆx 0 +0ŷ 0 + θ 1 ẑ 0 ω 1 1,2 =0ˆx 1 +0ŷ 1 + θ 2 ẑ 1 θ 2 ω 0 1,2 = R 0 1 ω 1 1,2 θ 1 ω 0 0,2 = ω 0 0,1 + R 0 1 ω 1 1,2 =0ˆx 0 +0ŷ 0 +( θ 1 + θ 2 )ẑ 0 ω 0 0,n = n i=1 R 0 i 1 ω i 1 i 1,i ω 0 0,n = n (R 0 i 1ẑ) θ i i=1 note: this holds for revolute joints only (by definition, a prismatic joint cannot create angular velocity)
26 And now, for that Jacobian! ω 0 0,n = n i=1 ρ i (R 0 i 1ẑ) θ i 0 for prismatic ρ i = 1 for revolute θ 1 ω 0 0,n = ρ 1 ẑ ρ 2 R 0 1ẑ ρ 2R 0 2ẑ... ρ nr 0 n 1ẑ θ 2... θ n ω = J ω (q) q
27 Jp (3 x n) cartesian velocity Jacobian J = J ω (6 x n) Jacobian a.k.a. manipulator Jacobian a.k.a. geometric Jacobian (3 x n) angular velocity Jacobian The Jacobian is easily constructed from the manipulator s forward kinematics. What do you need from the forward kinematics?
28
29 Revisiting Singularities Singularities are points in the configuration space where infinitesimal motion in a certain direction is not possible and the manipulator loses one or more degrees of freedom Mathematically, singularities exist at any point in the workspace where the Jacobian matrix loses rank. a matrix is singular if and only if its determinant is zero: det(j) =0
30 (6 x 1) body velocity (n x 1) joint velocities (6 x n) Jacobian For a 6-DOF manipulator with a spherical wrist, we can decouple the determination of singular configurations into two simpler problems.
31

32 Singular when any two wrist axes align
33 Manipulability For a specific configuration, the Jacobian scales the input (joint velocities) to the output (body velocity) If you put in a joint velocity vector with unit norm, you can calculate in which direction and how fast the robot will translate and rotate. If the Jacobian is full rank, you can calculate the manipulability ellipsoid. If not redundant, manipulability
34 What does the manipulability ellipsoid look like for the planar RR robot? (x, y) a 2 θ 2 a 1 θ 1

35 Can be used to tell you where to perform certain tasks. Also useful for deciding how to design a manipulator.
36 Soon I will release Homework 4, an individual assignment on Jacobians Not sure when it will be due...
37 Homework 2 and 3 graded
Differential Kinematics
 Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators. Velocity Kinematics
 Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Robotics & Automation. Lecture 17. Manipulability Ellipsoid, Singularities of Serial Arm. John T. Wen. October 14, 2008
 Robotics & Automation Lecture 17 Manipulability Ellipsoid, Singularities of Serial Arm John T. Wen October 14, 2008 Jacobian Singularity rank(j) = dimension of manipulability ellipsoid = # of independent
Robotics & Automation Lecture 17 Manipulability Ellipsoid, Singularities of Serial Arm John T. Wen October 14, 2008 Jacobian Singularity rank(j) = dimension of manipulability ellipsoid = # of independent
MEAM 520. Homogenous Transformations
 MEAM 520 Homogenous Transformations Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 3: September
MEAM 520 Homogenous Transformations Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 3: September
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
The Jacobian. Jesse van den Kieboom
 The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
DIFFERENTIAL KINEMATICS. Geometric Jacobian. Analytical Jacobian. Kinematic singularities. Kinematic redundancy. Inverse differential kinematics
 DIFFERENTIAL KINEMATICS relationship between joint velocities and end-effector velocities Geometric Jacobian Analytical Jacobian Kinematic singularities Kinematic redundancy Inverse differential kinematics
DIFFERENTIAL KINEMATICS relationship between joint velocities and end-effector velocities Geometric Jacobian Analytical Jacobian Kinematic singularities Kinematic redundancy Inverse differential kinematics
Ch. 5: Jacobian. 5.1 Introduction
 5.1 Introduction relationship between the end effector velocity and the joint rates differentiate the kinematic relationships to obtain the velocity relationship Jacobian matrix closely related to the
5.1 Introduction relationship between the end effector velocity and the joint rates differentiate the kinematic relationships to obtain the velocity relationship Jacobian matrix closely related to the
Exercise 1b: Differential Kinematics of the ABB IRB 120
 Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Position and orientation of rigid bodies
 Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Robotics & Automation. Lecture 06. Serial Kinematic Chain, Forward Kinematics. John T. Wen. September 11, 2008
 Robotics & Automation Lecture 06 Serial Kinematic Chain, Forward Kinematics John T. Wen September 11, 2008 So Far... We have covered rigid body rotational kinematics: representations of SO(3), change of
Robotics & Automation Lecture 06 Serial Kinematic Chain, Forward Kinematics John T. Wen September 11, 2008 So Far... We have covered rigid body rotational kinematics: representations of SO(3), change of
Advanced Robotic Manipulation
 Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
8 Velocity Kinematics
 8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Example: RR Robot. Illustrate the column vector of the Jacobian in the space at the end-effector point.
 Forward kinematics: X e = c 1 + c 12 Y e = s 1 + s 12 = s 1 s 12 c 1 + c 12, = s 12 c 12 Illustrate the column vector of the Jacobian in the space at the end-effector point. points in the direction perpendicular
Forward kinematics: X e = c 1 + c 12 Y e = s 1 + s 12 = s 1 s 12 c 1 + c 12, = s 12 c 12 Illustrate the column vector of the Jacobian in the space at the end-effector point. points in the direction perpendicular
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic Functions Kinematic functions Kinematics deals with the study of four functions(called kinematic functions or KFs) that mathematically
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic Functions Kinematic functions Kinematics deals with the study of four functions(called kinematic functions or KFs) that mathematically
Given U, V, x and θ perform the following steps: a) Find the rotation angle, φ, by which u 1 is rotated in relation to x 1
 Find the rotation angle, φ, by which u 1 is rotated in relation to x 1") 1 The Jacobian can be expressed in an arbitrary frame, such as the base frame located at the first joint, the hand frame located at the end-effector, or the global frame located somewhere else. The SVD
1 The Jacobian can be expressed in an arbitrary frame, such as the base frame located at the first joint, the hand frame located at the end-effector, or the global frame located somewhere else. The SVD
Chapter 3 + some notes on counting the number of degrees of freedom
 Chapter 3 + some notes on counting the number of degrees of freedom Minimum number of independent parameters = Some number of dependent parameters minus the number of relationships (equations) you can
Chapter 3 + some notes on counting the number of degrees of freedom Minimum number of independent parameters = Some number of dependent parameters minus the number of relationships (equations) you can
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
ME 115(b): Homework #2 Solution. Part (b): Using the Product of Exponentials approach, the structure equations take the form:
: Homework #2 Solution. Part (b): Using the Product of Exponentials approach, the structure equations take the form:") ME 5(b): Homework #2 Solution Problem : Problem 2 (d,e), Chapter 3 of MLS. Let s review some material from the parts (b) of this problem: Part (b): Using the Product of Exponentials approach, the structure
ME 5(b): Homework #2 Solution Problem : Problem 2 (d,e), Chapter 3 of MLS. Let s review some material from the parts (b) of this problem: Part (b): Using the Product of Exponentials approach, the structure
q 1 F m d p q 2 Figure 1: An automated crane with the relevant kinematic and dynamic definitions.
 Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Lecture Note 7: Velocity Kinematics and Jacobian
 ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
Robotics I. Classroom Test November 21, 2014
 Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Nonholonomic Constraints Examples
 Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
Robot Dynamics II: Trajectories & Motion
 Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS
 ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
Lecture Note 7: Velocity Kinematics and Jacobian
 ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
Lecture 7: Kinematics: Velocity Kinematics - the Jacobian
 Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian c Anton Shiriaev. 5EL158: Lecture 7 p. 1/?? Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian
Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian c Anton Shiriaev. 5EL158: Lecture 7 p. 1/?? Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
Automatic parallel parking and returning to traffic maneuvers. France. Male on Video:
 IntroductionToRobotics-Lecture08 Instructor (Oussama Khatib):Okay, let's get started. So today's video segment is it's about parallel parking. I know a lot of you don't know how to do the parallel parking,
IntroductionToRobotics-Lecture08 Instructor (Oussama Khatib):Okay, let's get started. So today's video segment is it's about parallel parking. I know a lot of you don't know how to do the parallel parking,
Case Study: The Pelican Prototype Robot
 5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
Robotics I. Test November 29, 2013
 Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Lecture 10. Rigid Body Transformation & C-Space Obstacles. CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University
 CS 460/560 Introduction to Computational Robotics Fall 017, Rutgers University Lecture 10 Rigid Body Transformation & C-Space Obstacles Instructor: Jingjin Yu Outline Rigid body, links, and joints Task
CS 460/560 Introduction to Computational Robotics Fall 017, Rutgers University Lecture 10 Rigid Body Transformation & C-Space Obstacles Instructor: Jingjin Yu Outline Rigid body, links, and joints Task
Kinematics of a UR5. Rasmus Skovgaard Andersen Aalborg University
 Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
Robots in games and competition. Each ball volley playing robot. Japan. Instructor (Oussama Khatib):I love the people.
:I love the people.") IntroductionToRobotics-Lecture07 Instructor (Oussama Khatib):Okay. Let s get started. So for this segment come on. Interesting. This is really an interesting development. In 99, a robot playing volleyball,
IntroductionToRobotics-Lecture07 Instructor (Oussama Khatib):Okay. Let s get started. So for this segment come on. Interesting. This is really an interesting development. In 99, a robot playing volleyball,
Advanced Robotic Manipulation
 Lecture Notes (CS327A) Advanced Robotic Manipulation Oussama Khatib Stanford University Spring 2005 ii c 2005 by Oussama Khatib Contents 1 Spatial Descriptions 1 1.1 Rigid Body Configuration.................
Lecture Notes (CS327A) Advanced Robotic Manipulation Oussama Khatib Stanford University Spring 2005 ii c 2005 by Oussama Khatib Contents 1 Spatial Descriptions 1 1.1 Rigid Body Configuration.................
Lecture «Robot Dynamics» : Kinematics 3
 Lecture «Robot Dynamics» : Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15-12:00, every week exercise: HG G1 Wednesday 8:15-10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics» : Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15-12:00, every week exercise: HG G1 Wednesday 8:15-10:00, according to schedule (about every 2nd week) office hour: LEE
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 2: Rigid Motions and Homogeneous Transformations
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 2: Rigid Motions and Homogeneous Transformations Reading: SHV Chapter 2 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/22 Representing Points, Vectors
MCE/EEC 647/747: Robot Dynamics and Control Lecture 2: Rigid Motions and Homogeneous Transformations Reading: SHV Chapter 2 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/22 Representing Points, Vectors
Numerical Methods for Inverse Kinematics
 Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Robot Dynamics Instantaneous Kinematiccs and Jacobians
 Robot Dynamics Instantaneous Kinematiccs and Jacobians 151-0851-00 V Lecture: Tuesday 10:15 12:00 CAB G11 Exercise: Tuesday 14:15 16:00 every 2nd week Marco Hutter, Michael Blösch, Roland Siegwart, Konrad
Robot Dynamics Instantaneous Kinematiccs and Jacobians 151-0851-00 V Lecture: Tuesday 10:15 12:00 CAB G11 Exercise: Tuesday 14:15 16:00 every 2nd week Marco Hutter, Michael Blösch, Roland Siegwart, Konrad
In this section of notes, we look at the calculation of forces and torques for a manipulator in two settings:
 Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
Lecture 14: Kinesthetic haptic devices: Higher degrees of freedom
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 14: Kinesthetic haptic devices: Higher degrees of freedom Allison M. Okamura Stanford University (This lecture was not given, but the notes
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 14: Kinesthetic haptic devices: Higher degrees of freedom Allison M. Okamura Stanford University (This lecture was not given, but the notes
Robotics I. June 6, 2017
 Robotics I June 6, 217 Exercise 1 Consider the planar PRPR manipulator in Fig. 1. The joint variables defined therein are those used by the manufacturer and do not correspond necessarily to a Denavit-Hartenberg
Robotics I June 6, 217 Exercise 1 Consider the planar PRPR manipulator in Fig. 1. The joint variables defined therein are those used by the manufacturer and do not correspond necessarily to a Denavit-Hartenberg
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Rotational & Rigid-Body Mechanics. Lectures 3+4
 Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Rotational & Rigid-Body Mechanics Lectures 3+4 Rotational Motion So far: point objects moving through a trajectory. Next: moving actual dimensional objects and rotating them. 2 Circular Motion - Definitions
Robotics I. February 6, 2014
 Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
Advanced Robotic Manipulation
 Advanced Robotic Manipulation Handout CS37A (Spring 017) Solution Set #3 Problem 1 - Inertial properties In this problem, you will explore the inertial properties of a manipulator at its end-effector.
Advanced Robotic Manipulation Handout CS37A (Spring 017) Solution Set #3 Problem 1 - Inertial properties In this problem, you will explore the inertial properties of a manipulator at its end-effector.
Screw Theory and its Applications in Robotics
 Screw Theory and its Applications in Robotics Marco Carricato Group of Robotics, Automation and Biomechanics University of Bologna Italy IFAC 2017 World Congress, Toulouse, France Table of Contents 1.
Screw Theory and its Applications in Robotics Marco Carricato Group of Robotics, Automation and Biomechanics University of Bologna Italy IFAC 2017 World Congress, Toulouse, France Table of Contents 1.
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS
 ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 4 KINEMATICS OF PARALLEL ROBOTS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian Institute of Science
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 4 KINEMATICS OF PARALLEL ROBOTS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian Institute of Science
Trajectory-tracking control of a planar 3-RRR parallel manipulator
 Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
DYNAMICS OF PARALLEL MANIPULATOR
 DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
Lecture «Robot Dynamics»: Kinematics 2
 Lecture «Robot Dynamics»: Kinematics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Introduction MEAM 535. What is MEAM 535? Audience. Advanced topics in dynamics
 What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
ME751 Advanced Computational Multibody Dynamics. September 14, 2016
 ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
Linear Algebra Review. Fei-Fei Li
 Linear Algebra Review Fei-Fei Li 1 / 51 Vectors Vectors and matrices are just collections of ordered numbers that represent something: movements in space, scaling factors, pixel brightnesses, etc. A vector
Linear Algebra Review Fei-Fei Li 1 / 51 Vectors Vectors and matrices are just collections of ordered numbers that represent something: movements in space, scaling factors, pixel brightnesses, etc. A vector
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
Robotics. Kinematics. Marc Toussaint University of Stuttgart Winter 2017/18
 Robotics Kinematics 3D geometry, homogeneous transformations, kinematic map, Jacobian, inverse kinematics as optimization problem, motion profiles, trajectory interpolation, multiple simultaneous tasks,
Robotics Kinematics 3D geometry, homogeneous transformations, kinematic map, Jacobian, inverse kinematics as optimization problem, motion profiles, trajectory interpolation, multiple simultaneous tasks,
Robotics I. April 1, the motion starts and ends with zero Cartesian velocity and acceleration;
 Robotics I April, 6 Consider a planar R robot with links of length l = and l =.5. he end-effector should move smoothly from an initial point p in to a final point p fin in the robot workspace so that the
Robotics I April, 6 Consider a planar R robot with links of length l = and l =.5. he end-effector should move smoothly from an initial point p in to a final point p fin in the robot workspace so that the
In most robotic applications the goal is to find a multi-body dynamics description formulated
 Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Chapter 3 Dynamics Mathematical models of a robot s dynamics provide a description of why things move when forces are generated in and applied on the system. They play an important role for both simulation
Linear Algebra and Robot Modeling
 Linear Algebra and Robot Modeling Nathan Ratliff Abstract Linear algebra is fundamental to robot modeling, control, and optimization. This document reviews some of the basic kinematic equations and uses
Linear Algebra and Robot Modeling Nathan Ratliff Abstract Linear algebra is fundamental to robot modeling, control, and optimization. This document reviews some of the basic kinematic equations and uses
Multi-Robotic Systems
 CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
The Virtual Linkage: A Model for Internal Forces in Multi-Grasp Manipulation
 The Virtual Linkage: A Model for Internal Forces in Multi-Grasp Manipulation David Williams Oussama Khatib Robotics Laboratory Department of Computer Science Stanford University Stanford, California 94305
The Virtual Linkage: A Model for Internal Forces in Multi-Grasp Manipulation David Williams Oussama Khatib Robotics Laboratory Department of Computer Science Stanford University Stanford, California 94305
Robust Control of Cooperative Underactuated Manipulators
 Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Lecture Note 4: General Rigid Body Motion
 ECE5463: Introduction to Robotics Lecture Note 4: General Rigid Body Motion Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture
ECE5463: Introduction to Robotics Lecture Note 4: General Rigid Body Motion Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture
Robotics I. Figure 1: Initial placement of a rigid thin rod of length L in an absolute reference frame.
 Robotics I September, 7 Exercise Consider the rigid body in Fig., a thin rod of length L. The rod will be rotated by an angle α around the z axis, then by an angle β around the resulting x axis, and finally
Robotics I September, 7 Exercise Consider the rigid body in Fig., a thin rod of length L. The rod will be rotated by an angle α around the z axis, then by an angle β around the resulting x axis, and finally
Physics 411 Lecture 7. Tensors. Lecture 7. Physics 411 Classical Mechanics II
 Physics 411 Lecture 7 Tensors Lecture 7 Physics 411 Classical Mechanics II September 12th 2007 In Electrodynamics, the implicit law governing the motion of particles is F α = m ẍ α. This is also true,
Physics 411 Lecture 7 Tensors Lecture 7 Physics 411 Classical Mechanics II September 12th 2007 In Electrodynamics, the implicit law governing the motion of particles is F α = m ẍ α. This is also true,
Framework Comparison Between a Multifingered Hand and a Parallel Manipulator
 Framework Comparison Between a Multifingered Hand and a Parallel Manipulator Júlia Borràs and Aaron M. Dollar Abstract In this paper we apply the kineto-static mathematical models commonly used for robotic
Framework Comparison Between a Multifingered Hand and a Parallel Manipulator Júlia Borràs and Aaron M. Dollar Abstract In this paper we apply the kineto-static mathematical models commonly used for robotic
Kinematic Isotropy of the H4 Class of Parallel Manipulators
 Kinematic Isotropy of the H4 Class of Parallel Manipulators Benoit Rousseau 1, Luc Baron 1 Département de génie mécanique, École Polytechnique de Montréal, benoit.rousseau@polymtl.ca Département de génie
Kinematic Isotropy of the H4 Class of Parallel Manipulators Benoit Rousseau 1, Luc Baron 1 Département de génie mécanique, École Polytechnique de Montréal, benoit.rousseau@polymtl.ca Département de génie
Generalized Forces. Hamilton Principle. Lagrange s Equations
 Chapter 5 Virtual Work and Lagrangian Dynamics Overview: Virtual work can be used to derive the dynamic and static equations without considering the constraint forces as was done in the Newtonian Mechanics,
Chapter 5 Virtual Work and Lagrangian Dynamics Overview: Virtual work can be used to derive the dynamic and static equations without considering the constraint forces as was done in the Newtonian Mechanics,
ECE 275A Homework # 3 Due Thursday 10/27/2016
 ECE 275A Homework # 3 Due Thursday 10/27/2016 Reading: In addition to the lecture material presented in class, students are to read and study the following: A. The material in Section 4.11 of Moon & Stirling
ECE 275A Homework # 3 Due Thursday 10/27/2016 Reading: In addition to the lecture material presented in class, students are to read and study the following: A. The material in Section 4.11 of Moon & Stirling
The Principle of Virtual Power Slide companion notes
 The Principle of Virtual Power Slide companion notes Slide 2 In Modules 2 and 3 we have seen concepts of Statics and Kinematics in a separate way. In this module we shall see how the static and the kinematic
The Principle of Virtual Power Slide companion notes Slide 2 In Modules 2 and 3 we have seen concepts of Statics and Kinematics in a separate way. In this module we shall see how the static and the kinematic
Video 1.1 Vijay Kumar and Ani Hsieh
 Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Robotics I Midterm classroom test November 24, 2017
 xercise [8 points] Robotics I Midterm classroom test November, 7 Consider the -dof (RPR) planar robot in ig., where the joint coordinates r = ( r r r have been defined in a free, arbitrary way, with reference
xercise [8 points] Robotics I Midterm classroom test November, 7 Consider the -dof (RPR) planar robot in ig., where the joint coordinates r = ( r r r have been defined in a free, arbitrary way, with reference
1/3/2011. This course discusses the physical laws that govern atmosphere/ocean motions.
 Lecture 1: Introduction and Review Dynamics and Kinematics Kinematics: The term kinematics means motion. Kinematics is the study of motion without regard for the cause. Dynamics: On the other hand, dynamics
Lecture 1: Introduction and Review Dynamics and Kinematics Kinematics: The term kinematics means motion. Kinematics is the study of motion without regard for the cause. Dynamics: On the other hand, dynamics
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Analysis of the Acceleration Characteristics of Non-Redundant Manipulators
 Analysis of the Acceleration Characteristics of Non-Redundant Manipulators Alan Bowling and Oussama Khatib Robotics Laboratory Computer Science Depart men t Stanford University Stanford, CA, USA 94305
Analysis of the Acceleration Characteristics of Non-Redundant Manipulators Alan Bowling and Oussama Khatib Robotics Laboratory Computer Science Depart men t Stanford University Stanford, CA, USA 94305
Robot Dynamics Lecture Notes. Robotic Systems Lab, ETH Zurich
 Robot Dynamics Lecture Notes Robotic Systems Lab, ETH Zurich HS 217 Contents 1 Introduction 1 1.1 Nomenclature.............................. 2 1.2 Operators................................ 3 2 Kinematics
Robot Dynamics Lecture Notes Robotic Systems Lab, ETH Zurich HS 217 Contents 1 Introduction 1 1.1 Nomenclature.............................. 2 1.2 Operators................................ 3 2 Kinematics
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Robotics: Tutorial 3
 Robotics: Tutorial 3 Mechatronics Engineering Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz German University in Cairo Faculty of Engineering and Material Science October
Robotics: Tutorial 3 Mechatronics Engineering Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz German University in Cairo Faculty of Engineering and Material Science October
, respectively to the inverse and the inverse differential problem. Check the correctness of the obtained results. Exercise 2 y P 2 P 1.
 Robotics I July 8 Exercise Define the orientation of a rigid body in the 3D space through three rotations by the angles α β and γ around three fixed axes in the sequence Y X and Z and determine the associated
Robotics I July 8 Exercise Define the orientation of a rigid body in the 3D space through three rotations by the angles α β and γ around three fixed axes in the sequence Y X and Z and determine the associated
Lecture 8: Kinematics: Path and Trajectory Planning
 Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration Space c Anton Shiriaev. 5EL158: Lecture 8 p. 1/20 Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration
Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration Space c Anton Shiriaev. 5EL158: Lecture 8 p. 1/20 Lecture 8: Kinematics: Path and Trajectory Planning Concept of Configuration
5. Nonholonomic constraint Mechanics of Manipulation
 5. Nonholonomic constraint Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 5. Mechanics of Manipulation p.1 Lecture 5. Nonholonomic constraint.
5. Nonholonomic constraint Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 5. Mechanics of Manipulation p.1 Lecture 5. Nonholonomic constraint.
Kinematics. Félix Monasterio-Huelin, Álvaro Gutiérrez & Blanca Larraga. September 5, Contents 1. List of Figures 1.
 Kinematics Féli Monasterio-Huelin, Álvaro Gutiérre & Blanca Larraga September 5, 2018 Contents Contents 1 List of Figures 1 List of Tables 2 Acronm list 3 1 Degrees of freedom and kinematic chains of rigid
Kinematics Féli Monasterio-Huelin, Álvaro Gutiérre & Blanca Larraga September 5, 2018 Contents Contents 1 List of Figures 1 List of Tables 2 Acronm list 3 1 Degrees of freedom and kinematic chains of rigid
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
1 Kalman Filter Introduction
 1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
1 Kalman Filter Introduction You should first read Chapter 1 of Stochastic models, estimation, and control: Volume 1 by Peter S. Maybec (available here). 1.1 Explanation of Equations (1-3) and (1-4) Equation
Line following of a mobile robot
 Line following of a mobile robot May 18, 004 1 In brief... The project is about controlling a differential steering mobile robot so that it follows a specified track. Steering is achieved by setting different
Line following of a mobile robot May 18, 004 1 In brief... The project is about controlling a differential steering mobile robot so that it follows a specified track. Steering is achieved by setting different
The Dynamics of Fixed Base and Free-Floating Robotic Manipulator
 The Dynamics of Fixed Base and Free-Floating Robotic Manipulator Ravindra Biradar 1, M.B.Kiran 1 M.Tech (CIM) Student, Department of Mechanical Engineering, Dayananda Sagar College of Engineering, Bangalore-560078
The Dynamics of Fixed Base and Free-Floating Robotic Manipulator Ravindra Biradar 1, M.B.Kiran 1 M.Tech (CIM) Student, Department of Mechanical Engineering, Dayananda Sagar College of Engineering, Bangalore-560078
Virtual Passive Controller for Robot Systems Using Joint Torque Sensors
 NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
Linearize a non-linear system at an appropriately chosen point to derive an LTI system with A, B,C, D matrices
 Dr. J. Tani, Prof. Dr. E. Frazzoli 151-0591-00 Control Systems I (HS 2018) Exercise Set 2 Topic: Modeling, Linearization Discussion: 5. 10. 2018 Learning objectives: The student can mousavis@ethz.ch, 4th
Dr. J. Tani, Prof. Dr. E. Frazzoli 151-0591-00 Control Systems I (HS 2018) Exercise Set 2 Topic: Modeling, Linearization Discussion: 5. 10. 2018 Learning objectives: The student can mousavis@ethz.ch, 4th
Introduction and Vectors Lecture 1
 1 Introduction Introduction and Vectors Lecture 1 This is a course on classical Electromagnetism. It is the foundation for more advanced courses in modern physics. All physics of the modern era, from quantum
1 Introduction Introduction and Vectors Lecture 1 This is a course on classical Electromagnetism. It is the foundation for more advanced courses in modern physics. All physics of the modern era, from quantum
Lab Partner(s) TA Initials (on completion) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE
 TA Initials (on completion) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE") TA name Lab section Date TA Initials (on completion) Name UW Student ID # Lab Partner(s) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE 117 Textbook Reference: Walker, Chapter 10-1,2, Chapter 11-1,3 SYNOPSIS
TA name Lab section Date TA Initials (on completion) Name UW Student ID # Lab Partner(s) EXPERIMENT 7: ANGULAR KINEMATICS AND TORQUE 117 Textbook Reference: Walker, Chapter 10-1,2, Chapter 11-1,3 SYNOPSIS
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Single Exponential Motion and Its Kinematic Generators
 PDFaid.Com #1 Pdf Solutions Single Exponential Motion and Its Kinematic Generators Guanfeng Liu, Yuanqin Wu, and Xin Chen Abstract Both constant velocity (CV) joints and zero-torsion parallel kinematic
PDFaid.Com #1 Pdf Solutions Single Exponential Motion and Its Kinematic Generators Guanfeng Liu, Yuanqin Wu, and Xin Chen Abstract Both constant velocity (CV) joints and zero-torsion parallel kinematic
Dynamics. describe the relationship between the joint actuator torques and the motion of the structure important role for
 Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
MODERN ROBOTICS MECHANICS, PLANNING, AND CONTROL. Practice Exercises. Contributions from Tito Fernandez, Kevin Lynch, Huan Weng, and Zack Woodruff
 MODERN ROBOTICS MECHANICS, PLANNING, AND CONTROL Practice Exercises Contributions from Tito Fernandez, Kevin Lynch, Huan Weng, and Zack Woodruff December 6, 2018 This is a supplemental document to Modern
MODERN ROBOTICS MECHANICS, PLANNING, AND CONTROL Practice Exercises Contributions from Tito Fernandez, Kevin Lynch, Huan Weng, and Zack Woodruff December 6, 2018 This is a supplemental document to Modern
ECE569 Exam 1 October 28, Name: Score: /100. Please leave fractions as fractions, but simplify them, etc.
 ECE569 Exam 1 October 28, 2015 1 Name: Score: /100 This exam is closed-book. You must show ALL of your work for full credit. Please read the questions carefully. Please check your answers carefully. Calculators
ECE569 Exam 1 October 28, 2015 1 Name: Score: /100 This exam is closed-book. You must show ALL of your work for full credit. Please read the questions carefully. Please check your answers carefully. Calculators