Lecture 14: Kinesthetic haptic devices: Higher degrees of freedom
|
|
|
- Constance Williamson
- 5 years ago
- Views:
Transcription

1 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 14: Kinesthetic haptic devices: Higher degrees of freedom Allison M. Okamura Stanford University (This lecture was not given, but the notes are posted for reference)
2 kinematics (Hapkit reminder)


3 transmission 2 Capstan drive Friction drive
4 x handle Hapkit kinematics r pulley pulley = r sector sector r handle x handle = r handle sector r sector sector r pulley pulley x handle = r handler pulley r sector pulley
5 Hapkit force/torque relationships F handle relationship between force and torque: = Fr r handle pulley r pulley = sector r sector F handle = sector r handle r sector sector r pulley pulley F handle = r sector r handle r pulley pulley
6 kinematics (a more complete introduction)
7 suggested references Introduction to robotics : mechanics and control John J. Craig Robot modeling and control Mark W. Spong, Seth Hutchinson, M. Vidyasagar A mathematical introduction to robotic manipulation Richard M. Murray, Zexiang Li, S. Shankar Sastry Springer handbook of robotics B. Siciliano, Oussama Khatib (eds.) docid=
8 kinematics The study of movement The branch of classical mechanics that describes the motion of objects without consideration of the forces that cause it Why do you need it? Determine endpoint position and/or joint positions Calculate mechanism velocities, accelerations, etc. Calculate force-torque relationships
9 degrees of freedom Number of independent position variables needed to in order to locate all parts of a mechanism DOF of motion DOF of sensing DOF of actuation The DOF of a mechanism does not always correspond to number of joints


10 it will help to prototype! round head paper fasteners officedepot.com
11 joints Think of a manipulator/ interface as a set of bodies connected by a chain of joints Revolute is the most common joint for robots From Craig, p. 69
12 forward kinematics for higher degrees of freedom for mechanical trackers that use joint angle sensors, you need a map between joint space and Cartesian space fwd kinematics: from joint angles, calculate endpoint position
13 joint variables Be careful how you define joint positions Absolute Relative
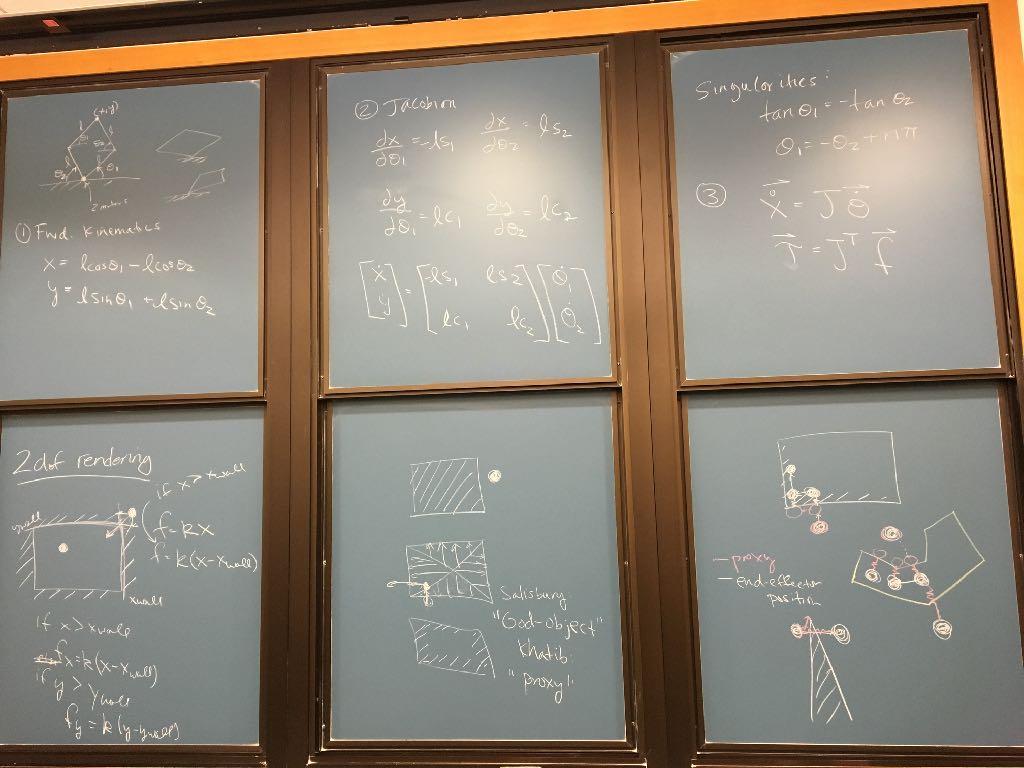
14 absolute forward kinematics x = L 1 cos(θ 1 ) + L 2 cos(θ 2 ) y = L 1 sin(θ 1 ) + L 2 sin(θ 2 ) (Often done this way for haptic devices)
15 relative forward kinematics x = L 1 cos(θ 1 ) + L 2 cos(θ 1 +θ 2 ) y = L 1 sin(θ 1 ) + L 2 sin(θ 1 + θ 2 ) (Often done this way for robots)
16 Inverse Kinematics Using the end-effector position, calculate the joint angles necessary to achieve that position Not used often for haptics But could be useful for planning/design There can be: No solution (workspace issue) One solution More than one solution
17 example Two possible solutions Two approaches: algebraic method (using transformation matrices) geometric method Your devices should be simple enough that you can just use geometry
18 computing end-effector velocity forward kinematics tells us the endpoint position based on joint positions how do we calculate endpoint velocity from joint velocities? use a matrix called the Jacobian ẋ = J q
19 formulating the Jacobian multidimensional form of the chain rule: 1 q 2 q 2 + ẏ q 1 q 2 2 assemble in matrix form: apple ẋ ẏ @q 2 # apple q1 q 2 ẋ = J q
20 Singularities Many devices will have configurations at which the Jacobian is singular This means that the device has lost one or more degrees of freedom in Cartesian Space Two kinds: Workspace boundary Workspace interior
21 Singularity Math If the matrix is invertible, then it is non-singular. θ = J 1 x Can check invertibility of J by taking the determinant of J. If the determinant is equal to 0, then J is singular. Can use this method to check which values of θ will cause singularities.
22 Calculating Singularities Simplify text: sin(θ 1 +θ 2 )=s 12 det( J( θ) ) = L 1s L s L s L c + L c L c = ( L 1 s 1 L 2 s 12 )L 2 c 12 + (L 1 c 1 + L 2 c 12 )L 2 s 12 For what values of θ 1 and θ 2 does this equal zero?
23 compute the necessary joint torques the Jacobian can also be used to relate joint torques to end-effector forces: = J T f this is a key equation for multi-degree-offreedom haptic devices
24 how do you get this equation? the Principle of virtual work f x = q f T x = T q states that changing the coordinate frame does not change the total work of a system f T J q = T f T J = T J T f = q
25 force generation signals desired force (in computer) counts D/A volts amplifiers voltage or current actuator force/torque transmission & kinematics endpoint force/torque
26 Phantom Omni kinematics
27 Phantom Omni End-Effector Base Rear Front

28 phantom omni link lengths
29 phantom omni End-Effector End-Effector End-Effector singular configurations
30 phantom omni If 3 is fixed, we can regard this as a two-link manipulator. When 3 = 0, on the y z plane, apple y z = apple l1 sin 1 + l 2 sin 2 l 1 cos 1 + l 2 cos 2 Now, let us consider 3. Note that 3 a ects x and z position, but not y position. So, we first calculate a link length, L, on the z x plane: L = l 1 cos 1 + l 2 cos 2 (1) Then, rotating the link length L around the y-axis gives you the forward kinematics of an Omni: x L sin 3 (l 1 cos 1 + l 2 cos 2 )sin 3 4 y 5 = 4 l 1 sin 1 + l 2 sin 2 5 = 4 l 1 sin 1 + l 2 sin 2 5 z L cos 3 (l 1 cos 1 + l 2 cos 2 ) cos 3
31 phantom omni By definition, Jacobian matrix for the Omni is 2 3 J = = l 1 sin 1 sin 3 l 2 sin 2 sin 3 (l 1 cos 1 + l 2 cos 2 ) cos 3 l 1 cos 1 l 2 cos 2 0 l 1 sin 1 cos 3 l 2 sin 2 cos 3 (l 1 cos 1 + l 2 cos 2 )sin 3 3 5
32 6 4 2 phantom 7 omni 5 4 Assume the device currently has joint angles θ = [ ] T, which is near the center of its workspace. If the joint velocities are θ = [ ] degrees per second, what is the vector of Cartesian endpoint velocities? 3 5 Computing the cartesian endpoint velocities is straightword using the Jacobian and the joint velocities. The joint velocities must first be converted into rad/s. 2 4 ẋ ẏ ż 3 5 = J = J = [m/s]
33 phantom omni Suppose that you want the robot end-effector to push on tissue with a Cartesian force vector of F = [ 4 1 3] T N. Your device is at the same position as stated above. What vector of joint torques would be needed to create this force at the end-effector? You can calculate joint torques from Jacobian matrix and Cartesian force: = J 2 T F 0.19 = [N-m] Note that this assumes that all the energy generated from the motors would equal the work done by the end e ector, that is, there is no energy loss.
34 pantograph mechanism

35 pantograph Definition 1: a mechanical linkage connected in a manner based on parallelograms so that the movement of one pen, in tracing an image, produces identical movements in a second pen. Definition 2: a kind of structure that can compress or extend like an accordion


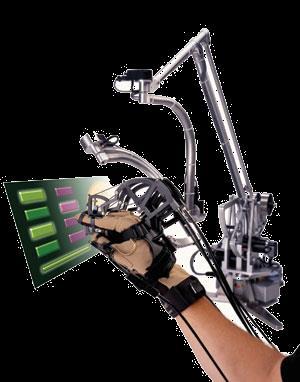
36 pantograph haptic device Xiyang Yeh, ME


37 pantograph haptic device Sam Schorr and Jared Muirhead, ME

38 pantograph haptic device a b c d e f N f T Campion and Hayward, IROS

39 example Find the forward kinematics Find the Jacobian
40 rendering
41
42 a commercial 3-DOF device 2014 slides from Francois Conti about Force Dimension and the Novint Falcon







43 Designing Commercial Haptic Devices ME /09/2014 François Conti Artificial Intelligence Laboratory Department of Computer Science Stanford University





44 Commercial Haptic Devices A 10 Year Journey François Conti - ME Stanford University - May 2014

45 Developing a Product Industrial Design omega.3 Force Dimension François Conti - ME Stanford University - May 2014

46 3D Consumer Haptic Interfaces Design Challenges omega.3 $ Falcon $200 François Conti - ME Stanford University - May 2014


47 3D Consumer Haptic Interfaces Design Challenges Maxon Motor $150 Johnson Motor $1.50 François Conti - ME Stanford University - May 2014

48 Position Sensors Optical Encoders quadrature signal CH A CH B position optical encoder Resolution 1000 increments per revolution. Low signal noise Signal remains digital. No analog conversion. Contact Frictionless. No contact between optical disc and sensor. Cost US$ for an encoder and counter. Phantom Sensable Technologies François Conti - ME Stanford University - May 2014

49 Position Sensors Optical Encoders François Conti - ME Stanford University - May 2014


50 Position Sensors Optical Encoders François Conti - ME Stanford University - May 2014

51 François Conti - ME Stanford University - May 2014 Mechanical Design Articulated Systems


52 Communication Interface Information Transfer position sensing receiving position data actuation information transfer force output computing forces François Conti - ME Stanford University - May 2014
53 Computation Position and Force forward kinematics q 2 y q 1 Joint space position x Cartesian position t = J T F t 2 y F t 1 Motors torques x Force computation François Conti - ME Stanford University - May 2014

54 Actuation Stage Current Amplifiers force DAC current amplifier digital to analog signal conversion torque / force commands François Conti - ME Stanford University - May 2014

55 Product Creation Designing Prototypes Prototype Force Dimension, Lunar Design François Conti - ME Stanford University - May 2014

56 Product Creation Designing Prototypes Prototype Force Dimension François Conti - ME Stanford University - May 2014

57 Product Creation Industrial Design Falcon Novint Technologies, Force Dimension François Conti - ME Stanford University - May 2014

58 Product Creation Industrial Design François Conti - ME Stanford University - May 2014

59 Product Creation Industrial Design François Conti - ME Stanford University - May 2014

60 Product Creation Industrial Design François Conti - ME Stanford University - May 2014


61 Product Creation First Production François Conti - ME Stanford University - May 2014

62 Product Creation Launching the Product François Conti - ME Stanford University - May 2014

63 Patents Protecting Ideas François Conti - ME Stanford University - May 2014

64 Medical Applications High-End Interfaces François Conti - ME Stanford University - May 2014


65 Medical Applications Building Partnerships Sensei Hansen Medical, Force Dimension François Conti - ME Stanford University - May 2014
66 Quality Control Certification and Validation François Conti - ME Stanford University - May 2014










67 Haptics The Sense of Touch François Conti - ME Stanford University - May 2014







68 Haptic Devices Market and Applications Cybergrasp Virtual Technologies Phantom MIT / Sensable Technologies idrive Immersion Corporation Haptic Workstation Immersion François Conti - ME Stanford University - May 2014


69 Le Syntaxeur EPFL Ecole Polytechnique Fédérale de Lausanne Le Syntaxeur EPFL, Switzerland François Conti - ME Stanford University - May 2014





70 Creating a Company Designing and Manufacturing Haptic Devices Force Dimension Switzerland François Conti - ME Stanford University - May 2014
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators. Velocity Kinematics
 Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Case Study: The Pelican Prototype Robot
 5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
Example: RR Robot. Illustrate the column vector of the Jacobian in the space at the end-effector point.
 Forward kinematics: X e = c 1 + c 12 Y e = s 1 + s 12 = s 1 s 12 c 1 + c 12, = s 12 c 12 Illustrate the column vector of the Jacobian in the space at the end-effector point. points in the direction perpendicular
Forward kinematics: X e = c 1 + c 12 Y e = s 1 + s 12 = s 1 s 12 c 1 + c 12, = s 12 c 12 Illustrate the column vector of the Jacobian in the space at the end-effector point. points in the direction perpendicular
MEAM 520. More Velocity Kinematics
 MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Introduction to Robotics
 J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
Robotics I Midterm classroom test November 24, 2017
 xercise [8 points] Robotics I Midterm classroom test November, 7 Consider the -dof (RPR) planar robot in ig., where the joint coordinates r = ( r r r have been defined in a free, arbitrary way, with reference
xercise [8 points] Robotics I Midterm classroom test November, 7 Consider the -dof (RPR) planar robot in ig., where the joint coordinates r = ( r r r have been defined in a free, arbitrary way, with reference
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
Video 1.1 Vijay Kumar and Ani Hsieh
 Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Differential Kinematics
 Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Robotics & Automation. Lecture 17. Manipulability Ellipsoid, Singularities of Serial Arm. John T. Wen. October 14, 2008
 Robotics & Automation Lecture 17 Manipulability Ellipsoid, Singularities of Serial Arm John T. Wen October 14, 2008 Jacobian Singularity rank(j) = dimension of manipulability ellipsoid = # of independent
Robotics & Automation Lecture 17 Manipulability Ellipsoid, Singularities of Serial Arm John T. Wen October 14, 2008 Jacobian Singularity rank(j) = dimension of manipulability ellipsoid = # of independent
Nonholonomic Constraints Examples
 Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
8 Velocity Kinematics
 8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
Robot Dynamics II: Trajectories & Motion
 Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Mobile Manipulation: Force Control
 8803 - Mobile Manipulation: Force Control Mike Stilman Robotics & Intelligent Machines @ GT Georgia Institute of Technology Atlanta, GA 30332-0760 February 19, 2008 1 Force Control Strategies Logic Branching
8803 - Mobile Manipulation: Force Control Mike Stilman Robotics & Intelligent Machines @ GT Georgia Institute of Technology Atlanta, GA 30332-0760 February 19, 2008 1 Force Control Strategies Logic Branching
Robot Modeling and Control
 Robot Modeling and Control First Edition Mark W. Spong, Seth Hutchinson, and M. Vidyasagar JOHN WILEY & SONS, INC. New York / Chichester / Weinheim / Brisbane / Singapore / Toronto Preface TO APPEAR i
Robot Modeling and Control First Edition Mark W. Spong, Seth Hutchinson, and M. Vidyasagar JOHN WILEY & SONS, INC. New York / Chichester / Weinheim / Brisbane / Singapore / Toronto Preface TO APPEAR i
Chapter 3 + some notes on counting the number of degrees of freedom
 Chapter 3 + some notes on counting the number of degrees of freedom Minimum number of independent parameters = Some number of dependent parameters minus the number of relationships (equations) you can
Chapter 3 + some notes on counting the number of degrees of freedom Minimum number of independent parameters = Some number of dependent parameters minus the number of relationships (equations) you can
Controlling the Apparent Inertia of Passive Human- Interactive Robots
 Controlling the Apparent Inertia of Passive Human- Interactive Robots Tom Worsnopp Michael Peshkin J. Edward Colgate Kevin Lynch Laboratory for Intelligent Mechanical Systems: Mechanical Engineering Department
Controlling the Apparent Inertia of Passive Human- Interactive Robots Tom Worsnopp Michael Peshkin J. Edward Colgate Kevin Lynch Laboratory for Intelligent Mechanical Systems: Mechanical Engineering Department
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
q 1 F m d p q 2 Figure 1: An automated crane with the relevant kinematic and dynamic definitions.
 Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
The Jacobian. Jesse van den Kieboom
 The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
Numerical Methods for Inverse Kinematics
 Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
In this section of notes, we look at the calculation of forces and torques for a manipulator in two settings:
 Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
Introduction Up to this point we have considered only the kinematics of a manipulator. That is, only the specification of motion without regard to the forces and torques required to cause motion In this
Constrained Motion Strategies for Robotic Systems
 Constrained Motion Strategies for Robotic Systems Jaeheung Park Ph.D. Candidate in Aero/Astro Department Advisor: Professor Khatib Artificial Intelligence Laboratory Computer Science Department Stanford
Constrained Motion Strategies for Robotic Systems Jaeheung Park Ph.D. Candidate in Aero/Astro Department Advisor: Professor Khatib Artificial Intelligence Laboratory Computer Science Department Stanford
EXPERIMENTAL COMPARISON OF TRAJECTORY TRACKERS FOR A CAR WITH TRAILERS
 1996 IFAC World Congress San Francisco, July 1996 EXPERIMENTAL COMPARISON OF TRAJECTORY TRACKERS FOR A CAR WITH TRAILERS Francesco Bullo Richard M. Murray Control and Dynamical Systems, California Institute
1996 IFAC World Congress San Francisco, July 1996 EXPERIMENTAL COMPARISON OF TRAJECTORY TRACKERS FOR A CAR WITH TRAILERS Francesco Bullo Richard M. Murray Control and Dynamical Systems, California Institute
Trajectory-tracking control of a planar 3-RRR parallel manipulator
 Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
 Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Robotics I. Classroom Test November 21, 2014
 Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation
 Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
The Reflexxes Motion Libraries. An Introduction to Instantaneous Trajectory Generation
 ICRA Tutorial, May 6, 2013 The Reflexxes Motion Libraries An Introduction to Instantaneous Trajectory Generation Torsten Kroeger 1 Schedule 8:30-10:00 Introduction and basics 10:00-10:30 Coffee break 10:30-11:30
ICRA Tutorial, May 6, 2013 The Reflexxes Motion Libraries An Introduction to Instantaneous Trajectory Generation Torsten Kroeger 1 Schedule 8:30-10:00 Introduction and basics 10:00-10:30 Coffee break 10:30-11:30
Impedance Operator. Piano Action Model. Admittance Operator. Haptic Display Device. Impedance Operator. Human
 Chapter 4 The Touchback Keyboard Design The driving point mechanical impedance of a very large class of mechanical systems can be simulated using an ODE solver as the primary computational workhorse. In
Chapter 4 The Touchback Keyboard Design The driving point mechanical impedance of a very large class of mechanical systems can be simulated using an ODE solver as the primary computational workhorse. In
Real-Time Obstacle Avoidance for trailer-like Systems
 Real-Time Obstacle Avoidance for trailer-like Systems T.A. Vidal-Calleja, M. Velasco-Villa,E.Aranda-Bricaire. Departamento de Ingeniería Eléctrica, Sección de Mecatrónica, CINVESTAV-IPN, A.P. 4-74, 7,
Real-Time Obstacle Avoidance for trailer-like Systems T.A. Vidal-Calleja, M. Velasco-Villa,E.Aranda-Bricaire. Departamento de Ingeniería Eléctrica, Sección de Mecatrónica, CINVESTAV-IPN, A.P. 4-74, 7,
Ch. 5: Jacobian. 5.1 Introduction
 5.1 Introduction relationship between the end effector velocity and the joint rates differentiate the kinematic relationships to obtain the velocity relationship Jacobian matrix closely related to the
5.1 Introduction relationship between the end effector velocity and the joint rates differentiate the kinematic relationships to obtain the velocity relationship Jacobian matrix closely related to the
The Principle of Virtual Power Slide companion notes
 The Principle of Virtual Power Slide companion notes Slide 2 In Modules 2 and 3 we have seen concepts of Statics and Kinematics in a separate way. In this module we shall see how the static and the kinematic
The Principle of Virtual Power Slide companion notes Slide 2 In Modules 2 and 3 we have seen concepts of Statics and Kinematics in a separate way. In this module we shall see how the static and the kinematic
Line following of a mobile robot
 Line following of a mobile robot May 18, 004 1 In brief... The project is about controlling a differential steering mobile robot so that it follows a specified track. Steering is achieved by setting different
Line following of a mobile robot May 18, 004 1 In brief... The project is about controlling a differential steering mobile robot so that it follows a specified track. Steering is achieved by setting different
Robot Manipulator Control. Hesheng Wang Dept. of Automation
 Robot Manipulator Control Hesheng Wang Dept. of Automation Introduction Industrial robots work based on the teaching/playback scheme Operators teach the task procedure to a robot he robot plays back eecute
Robot Manipulator Control Hesheng Wang Dept. of Automation Introduction Industrial robots work based on the teaching/playback scheme Operators teach the task procedure to a robot he robot plays back eecute
4.5 Shaft Misallignments and Flexible Couplings
 222 CHAPTER 4. MECHANISMS FOR MOTION TRANSMISSION 4.5 Shaft Misallignments and Flexible Couplings Mechanical systems always involve two or more shafts to transfer motion. There is always a finite accuracy
222 CHAPTER 4. MECHANISMS FOR MOTION TRANSMISSION 4.5 Shaft Misallignments and Flexible Couplings Mechanical systems always involve two or more shafts to transfer motion. There is always a finite accuracy
Design of a Linear Haptic Display Based on Approximate Straight Line Mechanisms
 The 21 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 21, Taipei, Taiwan Design of a Linear Haptic Display Based on Approximate Straight Line Mechanisms M. Joinié-Maurin,
The 21 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 21, Taipei, Taiwan Design of a Linear Haptic Display Based on Approximate Straight Line Mechanisms M. Joinié-Maurin,
Evaluation of a 4-Degree of Freedom Parallel Manipulator Stiffness
 Charles CORRADINI Jean-Christophe FAUROUX IFMA/LaRAMA, Clermont-Ferrand, France Evaluation of a 4-Degree of Freedom Parallel Manipulator Stiffness Laboratoire de Recherches et Applications en Mécanique
Charles CORRADINI Jean-Christophe FAUROUX IFMA/LaRAMA, Clermont-Ferrand, France Evaluation of a 4-Degree of Freedom Parallel Manipulator Stiffness Laboratoire de Recherches et Applications en Mécanique
MECHATRONICS ENGINEERING TECHNOLOGY. Modeling a Servo Motor System
 Modeling a Servo Motor System Definitions Motor: A device that receives a continuous (Analog) signal and operates continuously in time. Digital Controller: Discretizes the amplitude of the signal and also
Modeling a Servo Motor System Definitions Motor: A device that receives a continuous (Analog) signal and operates continuously in time. Digital Controller: Discretizes the amplitude of the signal and also
Multi-Priority Cartesian Impedance Control
 Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Chapter 2 Coordinate Systems and Transformations
 Chapter 2 Coordinate Systems and Transformations 2.1 Coordinate Systems This chapter describes the coordinate systems used in depicting the position and orientation (pose) of the aerial robot and its manipulator
Chapter 2 Coordinate Systems and Transformations 2.1 Coordinate Systems This chapter describes the coordinate systems used in depicting the position and orientation (pose) of the aerial robot and its manipulator
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
The PHANTOM Omni as an under-actuated robot
 Retrospective Theses and Dissertations 2007 The PHANTOM Omni as an under-actuated robot John Albert Beckman Iowa State University Follow this and additional works at: http://lib.dr.iastate.edu/rtd Part
Retrospective Theses and Dissertations 2007 The PHANTOM Omni as an under-actuated robot John Albert Beckman Iowa State University Follow this and additional works at: http://lib.dr.iastate.edu/rtd Part
Kinematics of a UR5. Rasmus Skovgaard Andersen Aalborg University
 Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
The Pantograph Mk-II: A Haptic Instrument
 The Pantograph Mk-II: A Haptic Instrument Gianni Campion, Student Member, IEEE, Qi Wang, Member, IEEE, and Vincent Hayward, Senior Member, IEEE Haptics Laboratory Centre for Intelligent Machines McGill
The Pantograph Mk-II: A Haptic Instrument Gianni Campion, Student Member, IEEE, Qi Wang, Member, IEEE, and Vincent Hayward, Senior Member, IEEE Haptics Laboratory Centre for Intelligent Machines McGill
Position and orientation of rigid bodies
 Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Exercise 1b: Differential Kinematics of the ABB IRB 120
 Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
EN Nonlinear Control and Planning in Robotics Lecture 2: System Models January 28, 2015
 EN53.678 Nonlinear Control and Planning in Robotics Lecture 2: System Models January 28, 25 Prof: Marin Kobilarov. Constraints The configuration space of a mechanical sysetm is denoted by Q and is assumed
EN53.678 Nonlinear Control and Planning in Robotics Lecture 2: System Models January 28, 25 Prof: Marin Kobilarov. Constraints The configuration space of a mechanical sysetm is denoted by Q and is assumed
Emulation of an Animal Limb with Two Degrees of Freedom using HIL
 Emulation of an Animal Limb with Two Degrees of Freedom using HIL Iván Bautista Gutiérrez, Fabián González Téllez, Dario Amaya H. Abstract The Bio-inspired robotic systems have been a focus of great interest
Emulation of an Animal Limb with Two Degrees of Freedom using HIL Iván Bautista Gutiérrez, Fabián González Téllez, Dario Amaya H. Abstract The Bio-inspired robotic systems have been a focus of great interest
Introduction to Haptic Systems
 Introduction to Haptic Systems Félix Monasterio-Huelin & Álvaro Gutiérrez & Blanca Larraga October 8, 2018 Contents Contents 1 List of Figures 1 1 Introduction 2 2 DC Motor 3 3 1 DOF DC motor model with
Introduction to Haptic Systems Félix Monasterio-Huelin & Álvaro Gutiérrez & Blanca Larraga October 8, 2018 Contents Contents 1 List of Figures 1 1 Introduction 2 2 DC Motor 3 3 1 DOF DC motor model with
Balancing of an Inverted Pendulum with a SCARA Robot
 Balancing of an Inverted Pendulum with a SCARA Robot Bernhard Sprenger, Ladislav Kucera, and Safer Mourad Swiss Federal Institute of Technology Zurich (ETHZ Institute of Robotics 89 Zurich, Switzerland
Balancing of an Inverted Pendulum with a SCARA Robot Bernhard Sprenger, Ladislav Kucera, and Safer Mourad Swiss Federal Institute of Technology Zurich (ETHZ Institute of Robotics 89 Zurich, Switzerland
Robotics, Geometry and Control - A Preview
 Robotics, Geometry and Control - A Preview Ravi Banavar 1 1 Systems and Control Engineering IIT Bombay HYCON-EECI Graduate School - Spring 2008 Broad areas Types of manipulators - articulated mechanisms,
Robotics, Geometry and Control - A Preview Ravi Banavar 1 1 Systems and Control Engineering IIT Bombay HYCON-EECI Graduate School - Spring 2008 Broad areas Types of manipulators - articulated mechanisms,
Prof. S.K. Saha. Sensors 1. Lecture 5 June 11, Prof. S.K. Saha. Purpose Classification Internal Sensors. External Sensors.
 Lecture 5 June 11, 2009 Sensors Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Announcement Outlines of slides in Lectures 1-4 on May 15, 18, 21, June 01, 2009, respectively, are available from: http://web.iitd.ac.in/~saha/
Lecture 5 June 11, 2009 Sensors Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi Announcement Outlines of slides in Lectures 1-4 on May 15, 18, 21, June 01, 2009, respectively, are available from: http://web.iitd.ac.in/~saha/
A Weight Compensation Mechanism with a Non-Circular Pulley and a Spring: Application to a Parallel Four-Bar Linkage Arm
 SICE Journal of Control, Measurement, and System Integration, Vol. 3, No. 2, pp. 130 136, March 2010 A Weight Compensation Mechanism with a Non-Circular Pulley and a Spring: Application to a Parallel Four-Bar
SICE Journal of Control, Measurement, and System Integration, Vol. 3, No. 2, pp. 130 136, March 2010 A Weight Compensation Mechanism with a Non-Circular Pulley and a Spring: Application to a Parallel Four-Bar
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
Robotics I. June 6, 2017
 Robotics I June 6, 217 Exercise 1 Consider the planar PRPR manipulator in Fig. 1. The joint variables defined therein are those used by the manufacturer and do not correspond necessarily to a Denavit-Hartenberg
Robotics I June 6, 217 Exercise 1 Consider the planar PRPR manipulator in Fig. 1. The joint variables defined therein are those used by the manufacturer and do not correspond necessarily to a Denavit-Hartenberg
MCE493/593 and EEC492/592 Prosthesis Design and Control
 MCE493/593 and EEC492/592 Prosthesis Design and Control Control Systems Part 3 Hanz Richter Department of Mechanical Engineering 2014 1 / 25 Electrical Impedance Electrical impedance: generalization of
MCE493/593 and EEC492/592 Prosthesis Design and Control Control Systems Part 3 Hanz Richter Department of Mechanical Engineering 2014 1 / 25 Electrical Impedance Electrical impedance: generalization of
CONTROL OF THE NONHOLONOMIC INTEGRATOR
 June 6, 25 CONTROL OF THE NONHOLONOMIC INTEGRATOR R. N. Banavar (Work done with V. Sankaranarayanan) Systems & Control Engg. Indian Institute of Technology, Bombay Mumbai -INDIA. banavar@iitb.ac.in Outline
June 6, 25 CONTROL OF THE NONHOLONOMIC INTEGRATOR R. N. Banavar (Work done with V. Sankaranarayanan) Systems & Control Engg. Indian Institute of Technology, Bombay Mumbai -INDIA. banavar@iitb.ac.in Outline
A passively safe cable driven upper limb rehabilitation exoskeleton
 Technology and Health Care 23 (2015) S197 S202 DOI 10.3233/THC-150954 IOS Press S197 A passively safe cable driven upper limb rehabilitation exoskeleton Yanyan Chen, Jizhuang Fan, Yanhe Zhu, Jie Zhao and
Technology and Health Care 23 (2015) S197 S202 DOI 10.3233/THC-150954 IOS Press S197 A passively safe cable driven upper limb rehabilitation exoskeleton Yanyan Chen, Jizhuang Fan, Yanhe Zhu, Jie Zhao and
ME 115(b): Homework #2 Solution. Part (b): Using the Product of Exponentials approach, the structure equations take the form:
: Homework #2 Solution. Part (b): Using the Product of Exponentials approach, the structure equations take the form:") ME 5(b): Homework #2 Solution Problem : Problem 2 (d,e), Chapter 3 of MLS. Let s review some material from the parts (b) of this problem: Part (b): Using the Product of Exponentials approach, the structure
ME 5(b): Homework #2 Solution Problem : Problem 2 (d,e), Chapter 3 of MLS. Let s review some material from the parts (b) of this problem: Part (b): Using the Product of Exponentials approach, the structure
Robotics I. February 6, 2014
 Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
Single Exponential Motion and Its Kinematic Generators
 PDFaid.Com #1 Pdf Solutions Single Exponential Motion and Its Kinematic Generators Guanfeng Liu, Yuanqin Wu, and Xin Chen Abstract Both constant velocity (CV) joints and zero-torsion parallel kinematic
PDFaid.Com #1 Pdf Solutions Single Exponential Motion and Its Kinematic Generators Guanfeng Liu, Yuanqin Wu, and Xin Chen Abstract Both constant velocity (CV) joints and zero-torsion parallel kinematic
Virtual Passive Controller for Robot Systems Using Joint Torque Sensors
 NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
Objectives. Fundamentals of Dynamics: Module 9 : Robot Dynamics & controls. Lecture 31 : Robot dynamics equation (LE & NE methods) and examples
 and examples") \ Module 9 : Robot Dynamics & controls Lecture 31 : Robot dynamics equation (LE & NE methods) and examples Objectives In this course you will learn the following Fundamentals of Dynamics Coriolis component
\ Module 9 : Robot Dynamics & controls Lecture 31 : Robot dynamics equation (LE & NE methods) and examples Objectives In this course you will learn the following Fundamentals of Dynamics Coriolis component
Robotics 2 Robot Interaction with the Environment
 Robotics 2 Robot Interaction with the Environment Prof. Alessandro De Luca Robot-environment interaction a robot (end-effector) may interact with the environment! modifying the state of the environment
Robotics 2 Robot Interaction with the Environment Prof. Alessandro De Luca Robot-environment interaction a robot (end-effector) may interact with the environment! modifying the state of the environment
Lecture Notes Multibody Dynamics B, wb1413
 Lecture Notes Multibody Dynamics B, wb1413 A. L. Schwab & Guido M.J. Delhaes Laboratory for Engineering Mechanics Mechanical Engineering Delft University of Technolgy The Netherlands June 9, 29 Contents
Lecture Notes Multibody Dynamics B, wb1413 A. L. Schwab & Guido M.J. Delhaes Laboratory for Engineering Mechanics Mechanical Engineering Delft University of Technolgy The Netherlands June 9, 29 Contents
Lagrangian Dynamics: Generalized Coordinates and Forces
 Lecture Outline 1 2.003J/1.053J Dynamics and Control I, Spring 2007 Professor Sanjay Sarma 4/2/2007 Lecture 13 Lagrangian Dynamics: Generalized Coordinates and Forces Lecture Outline Solve one problem
Lecture Outline 1 2.003J/1.053J Dynamics and Control I, Spring 2007 Professor Sanjay Sarma 4/2/2007 Lecture 13 Lagrangian Dynamics: Generalized Coordinates and Forces Lecture Outline Solve one problem
Design of a 5-dof Haptic Simulator for Urological Operations
 Proceedings 00 IEEE International Conference on Robotics and Automation, ICRA 0, Washington DC, May 11-15 00 Design of a 5-dof Haptic Simulator for Urological Operations Evangelos Papadopoulos 1, Kostas
Proceedings 00 IEEE International Conference on Robotics and Automation, ICRA 0, Washington DC, May 11-15 00 Design of a 5-dof Haptic Simulator for Urological Operations Evangelos Papadopoulos 1, Kostas
Robotics I. Test November 29, 2013
 Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Experimental Verification of Quasi-Static Equilibrium Analysis of a Haptic Device
 Experimental Verification of Quasi-Static Equilibrium Analysis of a Haptic Device Ibrahimcan GÖRGÜLÜ 1, Omar W. MAAROOF 1, Barış Taner 1, Mehmet İsmet Can DEDE 1, Marco CECCARELLI 2, 1 Izmir Institute
Experimental Verification of Quasi-Static Equilibrium Analysis of a Haptic Device Ibrahimcan GÖRGÜLÜ 1, Omar W. MAAROOF 1, Barış Taner 1, Mehmet İsmet Can DEDE 1, Marco CECCARELLI 2, 1 Izmir Institute
Journal of Artificial Intelligence in Electrical Engineering, Vol. 2, No.7, November 2013
 Journal of Artificial Intelligence in Electrical Engineering, Vol. 2, No.7, November 2013 Electronical and Mechanical System Modeling of Robot Dynamics Using a Mass/Pulley Model Ata olah Rajabpour 1, Amir
Journal of Artificial Intelligence in Electrical Engineering, Vol. 2, No.7, November 2013 Electronical and Mechanical System Modeling of Robot Dynamics Using a Mass/Pulley Model Ata olah Rajabpour 1, Amir
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS
 ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
Dynamics. describe the relationship between the joint actuator torques and the motion of the structure important role for
 Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Lecture Note 7: Velocity Kinematics and Jacobian
 ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
The Dynamics of Fixed Base and Free-Floating Robotic Manipulator
 The Dynamics of Fixed Base and Free-Floating Robotic Manipulator Ravindra Biradar 1, M.B.Kiran 1 M.Tech (CIM) Student, Department of Mechanical Engineering, Dayananda Sagar College of Engineering, Bangalore-560078
The Dynamics of Fixed Base and Free-Floating Robotic Manipulator Ravindra Biradar 1, M.B.Kiran 1 M.Tech (CIM) Student, Department of Mechanical Engineering, Dayananda Sagar College of Engineering, Bangalore-560078
An Earth Auger as Excavator for Planetary Underground Explorer Robot. Using Peristaltic Crawling
 An Earth Auger as Excavator for Planetary Underground Explorer Robot Using Peristaltic Crawling H. Omori *, T. Murakami, H. Nagai, T. Nakamura **, and T. Kubota *** * Department of Precision Mechanics,
An Earth Auger as Excavator for Planetary Underground Explorer Robot Using Peristaltic Crawling H. Omori *, T. Murakami, H. Nagai, T. Nakamura **, and T. Kubota *** * Department of Precision Mechanics,
Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic Actuation Systems
 211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
Robot Dynamics Lecture Notes. Robotic Systems Lab, ETH Zurich
 Robot Dynamics Lecture Notes Robotic Systems Lab, ETH Zurich HS 217 Contents 1 Introduction 1 1.1 Nomenclature.............................. 2 1.2 Operators................................ 3 2 Kinematics
Robot Dynamics Lecture Notes Robotic Systems Lab, ETH Zurich HS 217 Contents 1 Introduction 1 1.1 Nomenclature.............................. 2 1.2 Operators................................ 3 2 Kinematics
Lecture Note 7: Velocity Kinematics and Jacobian
 ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic Functions Kinematic functions Kinematics deals with the study of four functions(called kinematic functions or KFs) that mathematically
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic Functions Kinematic functions Kinematics deals with the study of four functions(called kinematic functions or KFs) that mathematically
Robotics: Tutorial 3
 Robotics: Tutorial 3 Mechatronics Engineering Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz German University in Cairo Faculty of Engineering and Material Science October
Robotics: Tutorial 3 Mechatronics Engineering Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz German University in Cairo Faculty of Engineering and Material Science October
Framework Comparison Between a Multifingered Hand and a Parallel Manipulator
 Framework Comparison Between a Multifingered Hand and a Parallel Manipulator Júlia Borràs and Aaron M. Dollar Abstract In this paper we apply the kineto-static mathematical models commonly used for robotic
Framework Comparison Between a Multifingered Hand and a Parallel Manipulator Júlia Borràs and Aaron M. Dollar Abstract In this paper we apply the kineto-static mathematical models commonly used for robotic
An experimental robot load identification method for industrial application
 An experimental robot load identification method for industrial application Jan Swevers 1, Birgit Naumer 2, Stefan Pieters 2, Erika Biber 2, Walter Verdonck 1, and Joris De Schutter 1 1 Katholieke Universiteit
An experimental robot load identification method for industrial application Jan Swevers 1, Birgit Naumer 2, Stefan Pieters 2, Erika Biber 2, Walter Verdonck 1, and Joris De Schutter 1 1 Katholieke Universiteit
Advanced Robotic Manipulation
 Lecture Notes (CS327A) Advanced Robotic Manipulation Oussama Khatib Stanford University Spring 2005 ii c 2005 by Oussama Khatib Contents 1 Spatial Descriptions 1 1.1 Rigid Body Configuration.................
Lecture Notes (CS327A) Advanced Robotic Manipulation Oussama Khatib Stanford University Spring 2005 ii c 2005 by Oussama Khatib Contents 1 Spatial Descriptions 1 1.1 Rigid Body Configuration.................
Kinematic analysis of Active Ankle using computational algebraic geometry
 Kinematic analysis of Active Ankle using computational algebraic geometry Shivesh Kumar 1a, Abhilash Nayak, Bertold Bongardt 1a, Andreas Mueller 3 and Frank Kirchner 1ab 1a Robotics Innovation Center,
Kinematic analysis of Active Ankle using computational algebraic geometry Shivesh Kumar 1a, Abhilash Nayak, Bertold Bongardt 1a, Andreas Mueller 3 and Frank Kirchner 1ab 1a Robotics Innovation Center,
Manuel Moreyra and Blake Hamaford
 Proceedings of the 1998 EEE nternational Conference on Robotics & Automation Leuven, Belgium * May 1998 OnSe Of Manuel Moreyra and Blake Hamaford Haptic Technologies nc. 4729 40th Ave. NE Seattle, WA 98105
Proceedings of the 1998 EEE nternational Conference on Robotics & Automation Leuven, Belgium * May 1998 OnSe Of Manuel Moreyra and Blake Hamaford Haptic Technologies nc. 4729 40th Ave. NE Seattle, WA 98105
The Virtual Linkage: A Model for Internal Forces in Multi-Grasp Manipulation
 The Virtual Linkage: A Model for Internal Forces in Multi-Grasp Manipulation David Williams Oussama Khatib Robotics Laboratory Department of Computer Science Stanford University Stanford, California 94305
The Virtual Linkage: A Model for Internal Forces in Multi-Grasp Manipulation David Williams Oussama Khatib Robotics Laboratory Department of Computer Science Stanford University Stanford, California 94305
Motion Control of Passive Haptic Device Using Wires with Servo Brakes
 The IEEE/RSJ International Conference on Intelligent Robots and Systems October 8-,, Taipei, Taiwan Motion Control of Passive Haptic Device Using Wires with Servo Brakes Yasuhisa Hirata, Keitaro Suzuki
The IEEE/RSJ International Conference on Intelligent Robots and Systems October 8-,, Taipei, Taiwan Motion Control of Passive Haptic Device Using Wires with Servo Brakes Yasuhisa Hirata, Keitaro Suzuki
Statistical Visual-Dynamic Model for Hand-Eye Coordination
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Statistical Visual-Dynamic Model for Hand-Eye Coordination Daniel Beale, Pejman Iravani
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Statistical Visual-Dynamic Model for Hand-Eye Coordination Daniel Beale, Pejman Iravani
Lab 6a: Pole Placement for the Inverted Pendulum
 Lab 6a: Pole Placement for the Inverted Pendulum Idiot. Above her head was the only stable place in the cosmos, the only refuge from the damnation of the Panta Rei, and she guessed it was the Pendulum
Lab 6a: Pole Placement for the Inverted Pendulum Idiot. Above her head was the only stable place in the cosmos, the only refuge from the damnation of the Panta Rei, and she guessed it was the Pendulum
Robot Control Basics CS 685
 Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
A Novel Spring Mechanism to Reduce Energy Consumption of Robotic Arms
 IEEE Accepted as contributing paper at IROS A Novel Spring Mechanism to Reduce Energy Consumption of Robotic Arms Michiel Plooij and Martijn Wisse Abstract Most conventional robotic arms use motors to
IEEE Accepted as contributing paper at IROS A Novel Spring Mechanism to Reduce Energy Consumption of Robotic Arms Michiel Plooij and Martijn Wisse Abstract Most conventional robotic arms use motors to
Exercises on Newton s Laws of Motion
 Exercises on Newton s Laws of Motion Problems created by: Raditya 1. A pendulum is hanging on a ceiling of a plane which is initially at rest. When the plane prepares to take off, it accelerates with a
Exercises on Newton s Laws of Motion Problems created by: Raditya 1. A pendulum is hanging on a ceiling of a plane which is initially at rest. When the plane prepares to take off, it accelerates with a
Introduction to Control (034040) lecture no. 2
 lecture no. 2") Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
DYNAMICS OF PARALLEL MANIPULATOR
 DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
RECURSIVE INVERSE DYNAMICS
 We assume at the outset that the manipulator under study is of the serial type with n+1 links including the base link and n joints of either the revolute or the prismatic type. The underlying algorithm
We assume at the outset that the manipulator under study is of the serial type with n+1 links including the base link and n joints of either the revolute or the prismatic type. The underlying algorithm
Robust Control of Cooperative Underactuated Manipulators
 Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as