Given U, V, x and θ perform the following steps: a) Find the rotation angle, φ, by which u 1 is rotated in relation to x 1
|
|
|
- Agnes Haynes
- 5 years ago
- Views:
Transcription
1 1 The Jacobian can be expressed in an arbitrary frame, such as the base frame located at the first joint, the hand frame located at the end-effector, or the global frame located somewhere else. The SVD has long been a valuable tool for quantifying various dexterity measures: manipulability (product of the singular values), isotropy (ratio of the maximum singular value to the minimum) and proximity to singularities (minimum singular value). (1) Prove: no matter what frame the Jacobian is expressed in, the value of the above dexterity measures based on the singular values will not change. (2) Give the physical explanation of the fact in (1).
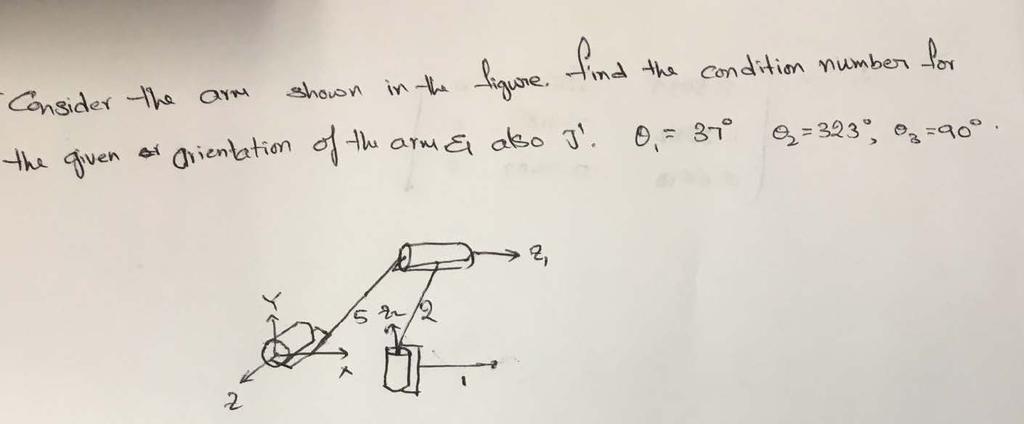
2 2 Given U, V, x and θ perform the following steps: a) Find the rotation angle, φ, by which u 1 is rotated in relation to x 1 b) Solve for σ i, i = 1,, min (m, n) c) Determine the condition number, k, for the matrix D from the SVD process d) Solve for the Jacobian, J, using the following two equations and show that they produce the same matrix: J = UDV T min (m,n) J = i=1 σ i u iv it e) Solve for the pseudo-inverse Jacobian, J +, using the following two equations and show that they produce the same matrix: J + = J (JJ ) 1 J + = min (m,n) 1 i=1 σ v iu it i U = [ ] V = 1 [ ] x = [ ] θ. 825 = [.34]

3 3 Scanned by CamScanner
4 4 Consider a planer robot manipulator with 2 links(two rotary joints), the link length are l " =3m, l # =2 2m, and the angular values are θ ", θ #. The Jacobian matrix is given below: (1) Please compute θ " and θ #, and draw the robot manipulator. (2) Please compute the singular value and the condition number k. (3) Compute the rotation angle φ as shown below and draw an ellipse which describes the velocity.
5 Suppose the configuration is just like the figure shows, with all links length equal to 1m, take X ", Y " and Z " as the base coordinate, and all the angle velocity is limited less or equal to 0.5 r/s. If we need to use damped least- squares solution to give the command. 1. Please determining an appropriate damping factor ( λ ) to meet all these constraints. 2. Under this situation what is the condition number (κ) equals to? 5
6 6
7 7 A 3DOF planar robot as below: Has a Jacobian J = [ ] where J0 = U D V T U = [ ] D= [ ] VT =[ ] a. Find σmin and σmax? And what does it mean if they are equal? b. Plot, as vectors, the effect of all joints at tooltip? c. Find the null vector for this configuration? d. Give one configuration (Thetas) that result σmin = 0 for the above robot? And, what does it mean if σmin = 0?

8 Scanned by CamScanner 8
9 9 Given X = [ 1 2 ] and J 2 3 = [ ]. Determine θ by pseudo inverse Jacobian (a) without damping factor; with damping factor λ=(b)0.1 (c)10.
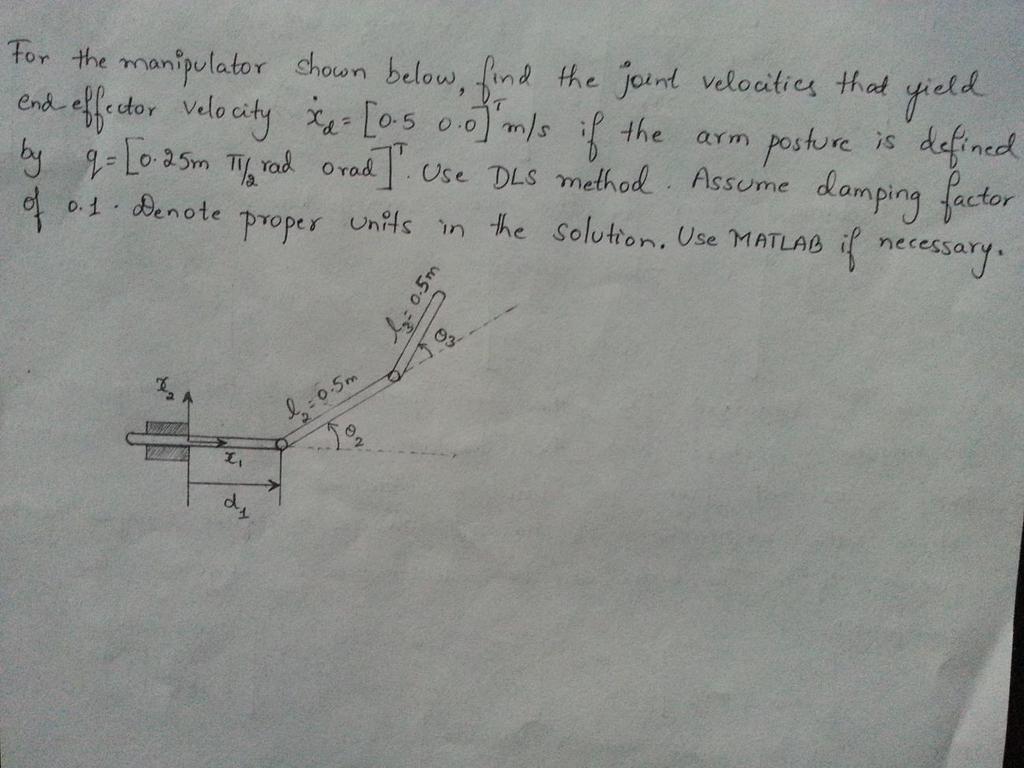
10 A 2-dimensional robotic manipulator is shown in the figure. Please calculate the joint velocities when we need a Vtip=(4,0) by using (a) ; (b) with λ 1 (c) How does λ affect the result? 10
11 11 1. Can one determine just by examining a jacobian, whether a robotic arm is in a singular configuration? If yes, suggest any two methods. 2. Damping coefficient in the damped least squares solution determines the damping needed when transitioning between singular and non-singular configurations. What is the effect of increasing damping coefficient to very high value? 3. You are given the task of designing a robot for minimal invasive surgery. Its application is in surgery where patients are operated upon by doctors using robotic arms. The given task requires a non-redundant robotic arm. You are required to calculate the damping coefficient for use in the inverse kinematics algorithm. Determine the best method applicable in this situation and calculate the optimum damping coefficient. Specifications: Maximum allowed tracking error = 0.1 mm Maximum allowed joint angle velocity = 25 rad/sec Maximum condition number = 5 Singular values of the robotic arm for the worst physical configuration: > 5.53 > 3.01 > > > 0.1

12 12
13 13

14 14 Scanned by CamScanner
15 15 Question: Draw a figure to compare the Pseudoinverse and Damped Least Square with singular value (σ) and Norm of Joint Velocity. Explain the difference between two solutions when closing to the singularity.
16 16
17 17 Given a 3 joint planar manipulator with a jacobian J = [ ] = USV = [ ] [ ] Q. 1: point What part of the SVD indicates when the configuration is nearing or in a singular configuration? Is the jacobian in or near a singular configuration? Q. 2: point Assuming the condition number of the jacobian is equal to the maximum condition number of the pseudoinverse, what damping factor should be used? Page 1 of 1
18 18 Find the SVD of the following matrix A: U, D,and V T A = [ 3 2 ] (1) 1
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
MEAM 520. More Velocity Kinematics
 MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
Lecture «Robot Dynamics» : Kinematics 3
 Lecture «Robot Dynamics» : Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15-12:00, every week exercise: HG G1 Wednesday 8:15-10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics» : Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15-12:00, every week exercise: HG G1 Wednesday 8:15-10:00, according to schedule (about every 2nd week) office hour: LEE
Exercise 1b: Differential Kinematics of the ABB IRB 120
 Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
Exercise 1b: Differential Kinematics of the ABB IRB 120 Marco Hutter, Michael Blösch, Dario Bellicoso, Samuel Bachmann October 5, 2016 Abstract The aim of this exercise is to calculate the differential
The Jacobian. Jesse van den Kieboom
 The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
Example: RR Robot. Illustrate the column vector of the Jacobian in the space at the end-effector point.
 Forward kinematics: X e = c 1 + c 12 Y e = s 1 + s 12 = s 1 s 12 c 1 + c 12, = s 12 c 12 Illustrate the column vector of the Jacobian in the space at the end-effector point. points in the direction perpendicular
Forward kinematics: X e = c 1 + c 12 Y e = s 1 + s 12 = s 1 s 12 c 1 + c 12, = s 12 c 12 Illustrate the column vector of the Jacobian in the space at the end-effector point. points in the direction perpendicular
Robotics I June 11, 2018
 Exercise 1 Robotics I June 11 018 Consider the planar R robot in Fig. 1 having a L-shaped second link. A frame RF e is attached to the gripper mounted on the robot end effector. A B y e C x e Figure 1:
Exercise 1 Robotics I June 11 018 Consider the planar R robot in Fig. 1 having a L-shaped second link. A frame RF e is attached to the gripper mounted on the robot end effector. A B y e C x e Figure 1:
Advanced Robotic Manipulation
 Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
Ch. 5: Jacobian. 5.1 Introduction
 5.1 Introduction relationship between the end effector velocity and the joint rates differentiate the kinematic relationships to obtain the velocity relationship Jacobian matrix closely related to the
5.1 Introduction relationship between the end effector velocity and the joint rates differentiate the kinematic relationships to obtain the velocity relationship Jacobian matrix closely related to the
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators. Velocity Kinematics
 Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Robotics & Automation. Lecture 17. Manipulability Ellipsoid, Singularities of Serial Arm. John T. Wen. October 14, 2008
 Robotics & Automation Lecture 17 Manipulability Ellipsoid, Singularities of Serial Arm John T. Wen October 14, 2008 Jacobian Singularity rank(j) = dimension of manipulability ellipsoid = # of independent
Robotics & Automation Lecture 17 Manipulability Ellipsoid, Singularities of Serial Arm John T. Wen October 14, 2008 Jacobian Singularity rank(j) = dimension of manipulability ellipsoid = # of independent
Numerical Methods for Inverse Kinematics
 Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Robotics I. June 6, 2017
 Robotics I June 6, 217 Exercise 1 Consider the planar PRPR manipulator in Fig. 1. The joint variables defined therein are those used by the manufacturer and do not correspond necessarily to a Denavit-Hartenberg
Robotics I June 6, 217 Exercise 1 Consider the planar PRPR manipulator in Fig. 1. The joint variables defined therein are those used by the manufacturer and do not correspond necessarily to a Denavit-Hartenberg
Differential Kinematics
 Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
Differential Kinematics Relations between motion (velocity) in joint space and motion (linear/angular velocity) in task space (e.g., Cartesian space) Instantaneous velocity mappings can be obtained through
DIFFERENTIAL KINEMATICS. Geometric Jacobian. Analytical Jacobian. Kinematic singularities. Kinematic redundancy. Inverse differential kinematics
 DIFFERENTIAL KINEMATICS relationship between joint velocities and end-effector velocities Geometric Jacobian Analytical Jacobian Kinematic singularities Kinematic redundancy Inverse differential kinematics
DIFFERENTIAL KINEMATICS relationship between joint velocities and end-effector velocities Geometric Jacobian Analytical Jacobian Kinematic singularities Kinematic redundancy Inverse differential kinematics
Advanced Robotic Manipulation
 Advanced Robotic Manipulation Handout CS37A (Spring 017) Solution Set #3 Problem 1 - Inertial properties In this problem, you will explore the inertial properties of a manipulator at its end-effector.
Advanced Robotic Manipulation Handout CS37A (Spring 017) Solution Set #3 Problem 1 - Inertial properties In this problem, you will explore the inertial properties of a manipulator at its end-effector.
ME5286 Robotics Spring 2017 Quiz 2
 Page 1 of 5 ME5286 Robotics Spring 2017 Quiz 2 Total Points: 30 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Page 1 of 5 ME5286 Robotics Spring 2017 Quiz 2 Total Points: 30 You are responsible for following these instructions. Please take a minute and read them completely. 1. Put your name on this page, any other
Multi-Priority Cartesian Impedance Control
 Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robot Dynamics Instantaneous Kinematiccs and Jacobians
 Robot Dynamics Instantaneous Kinematiccs and Jacobians 151-0851-00 V Lecture: Tuesday 10:15 12:00 CAB G11 Exercise: Tuesday 14:15 16:00 every 2nd week Marco Hutter, Michael Blösch, Roland Siegwart, Konrad
Robot Dynamics Instantaneous Kinematiccs and Jacobians 151-0851-00 V Lecture: Tuesday 10:15 12:00 CAB G11 Exercise: Tuesday 14:15 16:00 every 2nd week Marco Hutter, Michael Blösch, Roland Siegwart, Konrad
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics I. Test November 29, 2013
 Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
8 Velocity Kinematics
 8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
8 Velocity Kinematics Velocity analysis of a robot is divided into forward and inverse velocity kinematics. Having the time rate of joint variables and determination of the Cartesian velocity of end-effector
Robotics I. February 6, 2014
 Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
Robotics I February 6, 214 Exercise 1 A pan-tilt 1 camera sensor, such as the commercial webcams in Fig. 1, is mounted on the fixed base of a robot manipulator and is used for pointing at a (point-wise)
Operational Space Control of Constrained and Underactuated Systems
 Robotics: Science and Systems 2 Los Angeles, CA, USA, June 27-3, 2 Operational Space Control of Constrained and Underactuated Systems Michael Mistry Disney Research Pittsburgh 472 Forbes Ave., Suite Pittsburgh,
Robotics: Science and Systems 2 Los Angeles, CA, USA, June 27-3, 2 Operational Space Control of Constrained and Underactuated Systems Michael Mistry Disney Research Pittsburgh 472 Forbes Ave., Suite Pittsburgh,
Case Study: The Pelican Prototype Robot
 5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
Lecture 7: Kinematics: Velocity Kinematics - the Jacobian
 Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian c Anton Shiriaev. 5EL158: Lecture 7 p. 1/?? Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian
Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian c Anton Shiriaev. 5EL158: Lecture 7 p. 1/?? Lecture 7: Kinematics: Velocity Kinematics - the Jacobian Manipulator Jacobian
Robotics I. April 1, the motion starts and ends with zero Cartesian velocity and acceleration;
 Robotics I April, 6 Consider a planar R robot with links of length l = and l =.5. he end-effector should move smoothly from an initial point p in to a final point p fin in the robot workspace so that the
Robotics I April, 6 Consider a planar R robot with links of length l = and l =.5. he end-effector should move smoothly from an initial point p in to a final point p fin in the robot workspace so that the
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Robotics I Midterm classroom test November 24, 2017
 xercise [8 points] Robotics I Midterm classroom test November, 7 Consider the -dof (RPR) planar robot in ig., where the joint coordinates r = ( r r r have been defined in a free, arbitrary way, with reference
xercise [8 points] Robotics I Midterm classroom test November, 7 Consider the -dof (RPR) planar robot in ig., where the joint coordinates r = ( r r r have been defined in a free, arbitrary way, with reference
Advanced Robotic Manipulation
 Lecture Notes (CS327A) Advanced Robotic Manipulation Oussama Khatib Stanford University Spring 2005 ii c 2005 by Oussama Khatib Contents 1 Spatial Descriptions 1 1.1 Rigid Body Configuration.................
Lecture Notes (CS327A) Advanced Robotic Manipulation Oussama Khatib Stanford University Spring 2005 ii c 2005 by Oussama Khatib Contents 1 Spatial Descriptions 1 1.1 Rigid Body Configuration.................
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
Position and orientation of rigid bodies
 Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Robotics 1 Position and orientation of rigid bodies Prof. Alessandro De Luca Robotics 1 1 Position and orientation right-handed orthogonal Reference Frames RF A A p AB B RF B rigid body position: A p AB
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Reconfiguration Manipulability Analyses for Redundant Robots in View of Strucuture and Shape
 SCIS & ISIS 2010, Dec. 8-12, 2010, Okayama Convention Center, Okayama, Japan Reconfiguration Manipulability Analyses for Redundant Robots in View of Strucuture and Shape Mamoru Minami, Tongxiao Zhang,
SCIS & ISIS 2010, Dec. 8-12, 2010, Okayama Convention Center, Okayama, Japan Reconfiguration Manipulability Analyses for Redundant Robots in View of Strucuture and Shape Mamoru Minami, Tongxiao Zhang,
Robotics I. Classroom Test November 21, 2014
 Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Trajectory Planning from Multibody System Dynamics
 Trajectory Planning from Multibody System Dynamics Pierangelo Masarati Politecnico di Milano Dipartimento di Ingegneria Aerospaziale Manipulators 2 Manipulator: chain of
Trajectory Planning from Multibody System Dynamics Pierangelo Masarati Politecnico di Milano Dipartimento di Ingegneria Aerospaziale Manipulators 2 Manipulator: chain of
Robust Control of Cooperative Underactuated Manipulators
 Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic Functions Kinematic functions Kinematics deals with the study of four functions(called kinematic functions or KFs) that mathematically
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic Functions Kinematic functions Kinematics deals with the study of four functions(called kinematic functions or KFs) that mathematically
A new large projection operator for the redundancy framework
 21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA A new large projection operator for the redundancy framework Mohammed Marey
21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA A new large projection operator for the redundancy framework Mohammed Marey
Chapter 3 + some notes on counting the number of degrees of freedom
 Chapter 3 + some notes on counting the number of degrees of freedom Minimum number of independent parameters = Some number of dependent parameters minus the number of relationships (equations) you can
Chapter 3 + some notes on counting the number of degrees of freedom Minimum number of independent parameters = Some number of dependent parameters minus the number of relationships (equations) you can
Screw Theory and its Applications in Robotics
 Screw Theory and its Applications in Robotics Marco Carricato Group of Robotics, Automation and Biomechanics University of Bologna Italy IFAC 2017 World Congress, Toulouse, France Table of Contents 1.
Screw Theory and its Applications in Robotics Marco Carricato Group of Robotics, Automation and Biomechanics University of Bologna Italy IFAC 2017 World Congress, Toulouse, France Table of Contents 1.
Robot Dynamics II: Trajectories & Motion
 Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Exploiting Redundancy to Reduce Impact Force*
 1 of 6 Presented at IEEE/RSJ International Workshop on Intelligent Robots and Systems, Osaka, Japan, Nov. 1991. Exploiting Redundancy to Reduce Impact Force* Matthew Wayne Gertz**, Jin-Oh Kim, and Pradeep
1 of 6 Presented at IEEE/RSJ International Workshop on Intelligent Robots and Systems, Osaka, Japan, Nov. 1991. Exploiting Redundancy to Reduce Impact Force* Matthew Wayne Gertz**, Jin-Oh Kim, and Pradeep
Framework Comparison Between a Multifingered Hand and a Parallel Manipulator
 Framework Comparison Between a Multifingered Hand and a Parallel Manipulator Júlia Borràs and Aaron M. Dollar Abstract In this paper we apply the kineto-static mathematical models commonly used for robotic
Framework Comparison Between a Multifingered Hand and a Parallel Manipulator Júlia Borràs and Aaron M. Dollar Abstract In this paper we apply the kineto-static mathematical models commonly used for robotic
Control of a Handwriting Robot with DOF-Redundancy based on Feedback in Task-Coordinates
 Control of a Handwriting Robot with DOF-Redundancy based on Feedback in Task-Coordinates Hiroe HASHIGUCHI, Suguru ARIMOTO, and Ryuta OZAWA Dept. of Robotics, Ritsumeikan Univ., Kusatsu, Shiga 525-8577,
Control of a Handwriting Robot with DOF-Redundancy based on Feedback in Task-Coordinates Hiroe HASHIGUCHI, Suguru ARIMOTO, and Ryuta OZAWA Dept. of Robotics, Ritsumeikan Univ., Kusatsu, Shiga 525-8577,
Robotics. Kinematics. Marc Toussaint University of Stuttgart Winter 2017/18
 Robotics Kinematics 3D geometry, homogeneous transformations, kinematic map, Jacobian, inverse kinematics as optimization problem, motion profiles, trajectory interpolation, multiple simultaneous tasks,
Robotics Kinematics 3D geometry, homogeneous transformations, kinematic map, Jacobian, inverse kinematics as optimization problem, motion profiles, trajectory interpolation, multiple simultaneous tasks,
Coupling Visual Servoing with Active Structure from Motion
 Coupling Visual Servoing with Active Structure from Motion Riccardo Spica, Paolo Robuffo Giordano, and François Chaumette Abstract In this paper we propose a solution for coupling the execution of a visual
Coupling Visual Servoing with Active Structure from Motion Riccardo Spica, Paolo Robuffo Giordano, and François Chaumette Abstract In this paper we propose a solution for coupling the execution of a visual
Kinematic representation! Iterative methods! Optimization methods
 Human Kinematics Kinematic representation! Iterative methods! Optimization methods Kinematics Forward kinematics! given a joint configuration, what is the position of an end point on the structure?! Inverse
Human Kinematics Kinematic representation! Iterative methods! Optimization methods Kinematics Forward kinematics! given a joint configuration, what is the position of an end point on the structure?! Inverse
Robotics 2 Robots with kinematic redundancy
 Robotics 2 Robots with kinematic redundancy Prof. Alessandro De Luca Redundant robots! direct kinematics of the task r = f(q) f: Q! R joint space (dim Q = N) task space (dim R = M)! a robot is (kinematically)
Robotics 2 Robots with kinematic redundancy Prof. Alessandro De Luca Redundant robots! direct kinematics of the task r = f(q) f: Q! R joint space (dim Q = N) task space (dim R = M)! a robot is (kinematically)
Modelling and Interactional Control of a Multi-fingered Robotic Hand for Grasping and Manipulation.
 Modelling and Interactional Control of a Multi-fingered Robotic Hand for Grasping and Manipulation. Hasan, Md Rakibul The copyright of this thesis rests with the author and no quotation from it or information
Modelling and Interactional Control of a Multi-fingered Robotic Hand for Grasping and Manipulation. Hasan, Md Rakibul The copyright of this thesis rests with the author and no quotation from it or information
Kinematic Isotropy of the H4 Class of Parallel Manipulators
 Kinematic Isotropy of the H4 Class of Parallel Manipulators Benoit Rousseau 1, Luc Baron 1 Département de génie mécanique, École Polytechnique de Montréal, benoit.rousseau@polymtl.ca Département de génie
Kinematic Isotropy of the H4 Class of Parallel Manipulators Benoit Rousseau 1, Luc Baron 1 Département de génie mécanique, École Polytechnique de Montréal, benoit.rousseau@polymtl.ca Département de génie
Analysis of the Acceleration Characteristics of Non-Redundant Manipulators
 Analysis of the Acceleration Characteristics of Non-Redundant Manipulators Alan Bowling and Oussama Khatib Robotics Laboratory Computer Science Depart men t Stanford University Stanford, CA, USA 94305
Analysis of the Acceleration Characteristics of Non-Redundant Manipulators Alan Bowling and Oussama Khatib Robotics Laboratory Computer Science Depart men t Stanford University Stanford, CA, USA 94305
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS
 ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
ROBOTICS: ADVANCED CONCEPTS & ANALYSIS MODULE 5 VELOCITY AND STATIC ANALYSIS OF MANIPULATORS Ashitava Ghosal 1 1 Department of Mechanical Engineering & Centre for Product Design and Manufacture Indian
INSTRUCTIONS TO CANDIDATES:
 NATIONAL NIVERSITY OF SINGAPORE FINAL EXAMINATION FOR THE DEGREE OF B.ENG ME 444 - DYNAMICS AND CONTROL OF ROBOTIC SYSTEMS October/November 994 - Time Allowed: 3 Hours INSTRCTIONS TO CANDIDATES:. This
NATIONAL NIVERSITY OF SINGAPORE FINAL EXAMINATION FOR THE DEGREE OF B.ENG ME 444 - DYNAMICS AND CONTROL OF ROBOTIC SYSTEMS October/November 994 - Time Allowed: 3 Hours INSTRCTIONS TO CANDIDATES:. This
Robotics I. Figure 1: Initial placement of a rigid thin rod of length L in an absolute reference frame.
 Robotics I September, 7 Exercise Consider the rigid body in Fig., a thin rod of length L. The rod will be rotated by an angle α around the z axis, then by an angle β around the resulting x axis, and finally
Robotics I September, 7 Exercise Consider the rigid body in Fig., a thin rod of length L. The rod will be rotated by an angle α around the z axis, then by an angle β around the resulting x axis, and finally
Controlling the Apparent Inertia of Passive Human- Interactive Robots
 Controlling the Apparent Inertia of Passive Human- Interactive Robots Tom Worsnopp Michael Peshkin J. Edward Colgate Kevin Lynch Laboratory for Intelligent Mechanical Systems: Mechanical Engineering Department
Controlling the Apparent Inertia of Passive Human- Interactive Robots Tom Worsnopp Michael Peshkin J. Edward Colgate Kevin Lynch Laboratory for Intelligent Mechanical Systems: Mechanical Engineering Department
Lecture «Robot Dynamics»: Kinematics 2
 Lecture «Robot Dynamics»: Kinematics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
ME 115(b): Homework #2 Solution. Part (b): Using the Product of Exponentials approach, the structure equations take the form:
: Homework #2 Solution. Part (b): Using the Product of Exponentials approach, the structure equations take the form:") ME 5(b): Homework #2 Solution Problem : Problem 2 (d,e), Chapter 3 of MLS. Let s review some material from the parts (b) of this problem: Part (b): Using the Product of Exponentials approach, the structure
ME 5(b): Homework #2 Solution Problem : Problem 2 (d,e), Chapter 3 of MLS. Let s review some material from the parts (b) of this problem: Part (b): Using the Product of Exponentials approach, the structure
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Interpolated Rigid-Body Motions and Robotics
 Interpolated Rigid-Body Motions and Robotics J.M. Selig London South Bank University and Yuanqing Wu Shanghai Jiaotong University. IROS Beijing 2006 p.1/22 Introduction Interpolation of rigid motions important
Interpolated Rigid-Body Motions and Robotics J.M. Selig London South Bank University and Yuanqing Wu Shanghai Jiaotong University. IROS Beijing 2006 p.1/22 Introduction Interpolation of rigid motions important
q 1 F m d p q 2 Figure 1: An automated crane with the relevant kinematic and dynamic definitions.
 Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Trajectory-tracking control of a planar 3-RRR parallel manipulator
 Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Minimal representations of orientation
 Robotics 1 Minimal representations of orientation (Euler and roll-pitch-yaw angles) Homogeneous transformations Prof. lessandro De Luca Robotics 1 1 Minimal representations rotation matrices: 9 elements
Robotics 1 Minimal representations of orientation (Euler and roll-pitch-yaw angles) Homogeneous transformations Prof. lessandro De Luca Robotics 1 1 Minimal representations rotation matrices: 9 elements
Kinematics of a UR5. Rasmus Skovgaard Andersen Aalborg University
 Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
Kinematics of a UR5 May 3, 28 Rasmus Skovgaard Andersen Aalborg University Contents Introduction.................................... Notation.................................. 2 Forward Kinematics for
, respectively to the inverse and the inverse differential problem. Check the correctness of the obtained results. Exercise 2 y P 2 P 1.
 Robotics I July 8 Exercise Define the orientation of a rigid body in the 3D space through three rotations by the angles α β and γ around three fixed axes in the sequence Y X and Z and determine the associated
Robotics I July 8 Exercise Define the orientation of a rigid body in the 3D space through three rotations by the angles α β and γ around three fixed axes in the sequence Y X and Z and determine the associated
Manipulator Dynamics 2. Instructor: Jacob Rosen Advanced Robotic - MAE 263D - Department of Mechanical & Aerospace Engineering - UCLA
 Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
ECE569 Exam 1 October 28, Name: Score: /100. Please leave fractions as fractions, but simplify them, etc.
 ECE569 Exam 1 October 28, 2015 1 Name: Score: /100 This exam is closed-book. You must show ALL of your work for full credit. Please read the questions carefully. Please check your answers carefully. Calculators
ECE569 Exam 1 October 28, 2015 1 Name: Score: /100 This exam is closed-book. You must show ALL of your work for full credit. Please read the questions carefully. Please check your answers carefully. Calculators
The Principle of Virtual Power Slide companion notes
 The Principle of Virtual Power Slide companion notes Slide 2 In Modules 2 and 3 we have seen concepts of Statics and Kinematics in a separate way. In this module we shall see how the static and the kinematic
The Principle of Virtual Power Slide companion notes Slide 2 In Modules 2 and 3 we have seen concepts of Statics and Kinematics in a separate way. In this module we shall see how the static and the kinematic
1 Introduction. Control 2:
 Introduction Kinematics of Wheeled Mobile Robots (No legs here. They ork like arms. We e seen arms already) For control purposes, the kinematics of heeled mobile robots (WMRs) that e care about are the
Introduction Kinematics of Wheeled Mobile Robots (No legs here. They ork like arms. We e seen arms already) For control purposes, the kinematics of heeled mobile robots (WMRs) that e care about are the
Structural topology, singularity, and kinematic analysis. J-P. Merlet HEPHAISTOS project INRIA Sophia-Antipolis
 Structural topology, singularity, and kinematic analysis J-P. Merlet HEPHAISTOS project INRIA Sophia-Antipolis 1 Parallel robots Definitions: a closed-loop mechanism whose end-effector is linked to the
Structural topology, singularity, and kinematic analysis J-P. Merlet HEPHAISTOS project INRIA Sophia-Antipolis 1 Parallel robots Definitions: a closed-loop mechanism whose end-effector is linked to the
Lecture Notes: (Stochastic) Optimal Control
 Optimal Control") Lecture Notes: (Stochastic) Optimal ontrol Marc Toussaint Machine Learning & Robotics group, TU erlin Franklinstr. 28/29, FR 6-9, 587 erlin, Germany July, 2 Disclaimer: These notes are not meant to be
Lecture Notes: (Stochastic) Optimal ontrol Marc Toussaint Machine Learning & Robotics group, TU erlin Franklinstr. 28/29, FR 6-9, 587 erlin, Germany July, 2 Disclaimer: These notes are not meant to be
Dynamics. describe the relationship between the joint actuator torques and the motion of the structure important role for
 Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Energy Optimum Reactionless Path Planning for Capture of Tumbling Orbiting Objects using a Dual-Arm Robot
 Energy Optimum Reactionless Path Planning for Capture of Tumbling Orbiting Objects using a Dual-Arm Robot S. V. Shah and A. Gattupalli Robotics Research Center International Institute of Information Technology
Energy Optimum Reactionless Path Planning for Capture of Tumbling Orbiting Objects using a Dual-Arm Robot S. V. Shah and A. Gattupalli Robotics Research Center International Institute of Information Technology
Lecture «Robot Dynamics»: Dynamics and Control
 Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
1. Consider the 1-DOF system described by the equation of motion, 4ẍ+20ẋ+25x = f.
 Introduction to Robotics (CS3A) Homework #6 Solution (Winter 7/8). Consider the -DOF system described by the equation of motion, ẍ+ẋ+5x = f. (a) Find the natural frequency ω n and the natural damping ratio
Introduction to Robotics (CS3A) Homework #6 Solution (Winter 7/8). Consider the -DOF system described by the equation of motion, ẍ+ẋ+5x = f. (a) Find the natural frequency ω n and the natural damping ratio
Lecture Note 8: Inverse Kinematics
 ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 8: Inverse Kinematics Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 8 (ECE5463
DYNAMICS OF PARALLEL MANIPULATOR
 DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
DYNAMICS OF PARALLEL MANIPULATOR PARALLEL MANIPULATORS 6-degree of Freedom Flight Simulator BACKGROUND Platform-type parallel mechanisms 6-DOF MANIPULATORS INTRODUCTION Under alternative robotic mechanical
Directional Redundancy for Robot Control
 ACCEPTED FOR PUBLICATION IN IEEE TRANSACTIONS ON AUTOMATIC CONTROL Directional Redundancy for Robot Control Nicolas Mansard, François Chaumette, Member, IEEE Abstract The paper presents a new approach
ACCEPTED FOR PUBLICATION IN IEEE TRANSACTIONS ON AUTOMATIC CONTROL Directional Redundancy for Robot Control Nicolas Mansard, François Chaumette, Member, IEEE Abstract The paper presents a new approach
1.053J/2.003J Dynamics and Control I Fall Final Exam 18 th December, 2007
 1.053J/2.003J Dynamics and Control I Fall 2007 Final Exam 18 th December, 2007 Important Notes: 1. You are allowed to use three letter-size sheets (two-sides each) of notes. 2. There are five (5) problems
1.053J/2.003J Dynamics and Control I Fall 2007 Final Exam 18 th December, 2007 Important Notes: 1. You are allowed to use three letter-size sheets (two-sides each) of notes. 2. There are five (5) problems
Robotics: Tutorial 3
 Robotics: Tutorial 3 Mechatronics Engineering Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz German University in Cairo Faculty of Engineering and Material Science October
Robotics: Tutorial 3 Mechatronics Engineering Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz German University in Cairo Faculty of Engineering and Material Science October
Pose Tracking II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 12! stanford.edu/class/ee267/!
 Pose Tracking II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 12! stanford.edu/class/ee267/!! WARNING! this class will be dense! will learn how to use nonlinear optimization
Pose Tracking II! Gordon Wetzstein! Stanford University! EE 267 Virtual Reality! Lecture 12! stanford.edu/class/ee267/!! WARNING! this class will be dense! will learn how to use nonlinear optimization
R rapidly increased. A particular problem studied by severa1
 leee TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 8, NO. 1, FEBRUARY 1992 1 Analysis of a Redundant Free-Flying Spacecraft/Manipulator System Dragomir Nenchev, Yoji Umetani, and Kazuya Yoshida, Member,
leee TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 8, NO. 1, FEBRUARY 1992 1 Analysis of a Redundant Free-Flying Spacecraft/Manipulator System Dragomir Nenchev, Yoji Umetani, and Kazuya Yoshida, Member,
Robotics & Automation. Lecture 06. Serial Kinematic Chain, Forward Kinematics. John T. Wen. September 11, 2008
 Robotics & Automation Lecture 06 Serial Kinematic Chain, Forward Kinematics John T. Wen September 11, 2008 So Far... We have covered rigid body rotational kinematics: representations of SO(3), change of
Robotics & Automation Lecture 06 Serial Kinematic Chain, Forward Kinematics John T. Wen September 11, 2008 So Far... We have covered rigid body rotational kinematics: representations of SO(3), change of
3D Computer Vision - WT 2004
 3D Computer Vision - WT 2004 Singular Value Decomposition Darko Zikic CAMP - Chair for Computer Aided Medical Procedures November 4, 2004 1 2 3 4 5 Properties For any given matrix A R m n there exists
3D Computer Vision - WT 2004 Singular Value Decomposition Darko Zikic CAMP - Chair for Computer Aided Medical Procedures November 4, 2004 1 2 3 4 5 Properties For any given matrix A R m n there exists
IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
 Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Nonholonomic Constraints Examples
 Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
Nonholonomic Constraints Examples Basilio Bona DAUIN Politecnico di Torino July 2009 B. Bona (DAUIN) Examples July 2009 1 / 34 Example 1 Given q T = [ x y ] T check that the constraint φ(q) = (2x + siny
Lecture «Robot Dynamics»: Dynamics 2
 Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Clemson University College of Engineering and Science Control and Robotics (CRB) Technical Report
 Technical Report") Clemson University College of Engineering and Science Control and Robotics (CRB) Technical Report Number: CU/CRB/8/3/5/#1 Title: Adaptive Nonlinear Tracking Control of Kinematically Redundant Robot Manipulators
Clemson University College of Engineering and Science Control and Robotics (CRB) Technical Report Number: CU/CRB/8/3/5/#1 Title: Adaptive Nonlinear Tracking Control of Kinematically Redundant Robot Manipulators
KINEMATIC ISOTROPY OF THE H4 CLASS OF PARALLEL MANIPULATORS
 KINEMATIC ISOTROPY OF THE H4 CLASS OF PARALLEL MANIPULATORS Benoit Rousseau, Luc Baron Département de génie mécanique, École Polytechnique de Montréal, Montréal, Québec, Canada E-mail: benoit.rousseau@polymtl.ca;
KINEMATIC ISOTROPY OF THE H4 CLASS OF PARALLEL MANIPULATORS Benoit Rousseau, Luc Baron Département de génie mécanique, École Polytechnique de Montréal, Montréal, Québec, Canada E-mail: benoit.rousseau@polymtl.ca;
Lecture Note 7: Velocity Kinematics and Jacobian
 ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
ECE5463: Introduction to Robotics Lecture Note 7: Velocity Kinematics and Jacobian Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018
Neural Network Control of Robot Manipulators and Nonlinear Systems
 Neural Network Control of Robot Manipulators and Nonlinear Systems F.L. LEWIS Automation and Robotics Research Institute The University of Texas at Arlington S. JAG ANNATHAN Systems and Controls Research
Neural Network Control of Robot Manipulators and Nonlinear Systems F.L. LEWIS Automation and Robotics Research Institute The University of Texas at Arlington S. JAG ANNATHAN Systems and Controls Research
DS-GA 1002 Lecture notes 10 November 23, Linear models
 DS-GA 2 Lecture notes November 23, 2 Linear functions Linear models A linear model encodes the assumption that two quantities are linearly related. Mathematically, this is characterized using linear functions.
DS-GA 2 Lecture notes November 23, 2 Linear functions Linear models A linear model encodes the assumption that two quantities are linearly related. Mathematically, this is characterized using linear functions.
1. INTRODUCTION. Fig. 1 SAUVIM
 Automatic Fault-Accommodating Thrust Redistribution for a Redundant AUV Aaron M. Hanai *, Giacomo Marani* 2, Song K. Choi* 2 * Marine Autonomous Systems Engineering, Inc. 2333 Kapiolani Blvd. #92, Honolulu,
Automatic Fault-Accommodating Thrust Redistribution for a Redundant AUV Aaron M. Hanai *, Giacomo Marani* 2, Song K. Choi* 2 * Marine Autonomous Systems Engineering, Inc. 2333 Kapiolani Blvd. #92, Honolulu,
The Dynamics of Fixed Base and Free-Floating Robotic Manipulator
 The Dynamics of Fixed Base and Free-Floating Robotic Manipulator Ravindra Biradar 1, M.B.Kiran 1 M.Tech (CIM) Student, Department of Mechanical Engineering, Dayananda Sagar College of Engineering, Bangalore-560078
The Dynamics of Fixed Base and Free-Floating Robotic Manipulator Ravindra Biradar 1, M.B.Kiran 1 M.Tech (CIM) Student, Department of Mechanical Engineering, Dayananda Sagar College of Engineering, Bangalore-560078
WEEK 1 Dynamics of Machinery
 WEEK 1 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J. Uicker, G.R.Pennock ve J.E. Shigley, 2003 Makine Dinamiği, Prof. Dr. Eres SÖYLEMEZ, 2013 Uygulamalı Makine Dinamiği, Jeremy
WEEK 1 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J. Uicker, G.R.Pennock ve J.E. Shigley, 2003 Makine Dinamiği, Prof. Dr. Eres SÖYLEMEZ, 2013 Uygulamalı Makine Dinamiği, Jeremy
Linear Algebra Review
 Appendix E Linear Algebra Review In this review we consider linear equations of the form Ax = b, where x R n, b R m, and A R m n. Such equations arise often in this textbook. This review is a succinct
Appendix E Linear Algebra Review In this review we consider linear equations of the form Ax = b, where x R n, b R m, and A R m n. Such equations arise often in this textbook. This review is a succinct
Zero Reaction Maneuver: Flight Validation with ETS-VII Space Robot and Extension to Kinematically Redundant Arm
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Zero Reaction Maneuver: Flight Validation with ETS-VII Space Robot and Extension to Kinematically
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Zero Reaction Maneuver: Flight Validation with ETS-VII Space Robot and Extension to Kinematically