Understanding Earth Rotation Part 2: Physical Foundations and Interpretation
|
|
|
- Mabel Bryan
- 5 years ago
- Views:
Transcription
1 Understanding Earth Rotation Part 2: Physical Foundations and Interpretation Prof. Dr. Florian Seitz Technische Universität München (TUM) Deutsches Geodätisches Forschungsinstitut (DGFI) Munich, Germany International Summer School on Space Geodesy and Earth System August 21-25, 2012 Shanghai, China 1

2 Physical Foundations of Earth rotation Earth rotation is a rotational motion of many individual and mutually linked mass elements about one common axis This rotational motion is comparable to that of a physical gyroscope The physical description of Earth rotation is based on equations describing the motion of a gyro 2
3 Rotational motion of one individual mass element Viewed with respect to a non-rotating reference system: Angular momentum of rotating mass element M: with the relation between angular velocity and track speed v = ω r: e 1 e 3 e 2 M v r ω H = M (r v) H = (Mr 2 ) ω 3
4 Rotational motion of one individual mass element Viewed with respect to a non-rotating reference system: Angular momentum of rotating mass element M: with the relation between angular velocity and track speed v = ω r: with the moment of inertia J = Mr 2 : H = M (r v) H = (Mr 2 ) ω H = J ω Angular momentum is directly proportional to the angular velocity The proportionality constant is the moment of inertia J 4
 ω =")

5 Conservation of angular momentum Without external forces: Angular momentum is a conserved quantity: H = (Mr 2 ) ω = const. If the distance of the mass element to the axis of rotation decreases, the angular velocity has to increase accordingly. 5


6 Rigid system of point masses Total angular momentum of a rigid system of N point masses: with v i = ω r i : The moment of inertia is replaced by the tensor of inertia I: H = Σ M i (r i v i ) H = Σ (M i r i2 ) ω H = I ω The tensor of inertia describes the distribution of the mass elements in the system. N i=1 N i=1 6
7 Conservation of angular momentum & balance of angular momentum In a closed system the total angular momentum is conserved: N H = Σ M i (r i v i ) = H 1 + H 2 + H H N = const. i=1 7
 = H 1 + H 2")
: N N i=1 N i=1 N i=1 balance of total angular momentum H and")
8 Conservation of angular momentum & balance of angular momentum 8 In a closed system the total angular momentum is conserved: H = Σ M i (r i v i ) = H 1 + H 2 + H H N = const. i=1 If external forces are acting (e.g. gravitation): N N i=1 N i=1 N i=1 balance of total angular momentum H and total external torque L:
9 Non-rotating reference system For a rotary motion in a non-rotating reference system we have for every arbitrary vector x: (example: v = ω r ) Coordinate axes do not participate in the rotation. We have for the unity vectors e j (j = 1,2,3) : e 1 e 3 e 2 x x ω x = ω x e j = 0 9
10 Rotating reference system For a rotary motion in a rotating reference system we have also for the coordinate vectors: e j e j ω e j = ω e j 10
11 Rotating reference system For a rotary motion in a rotating reference system we have also for the coordinate vectors: So we have for every arbitrary vector x j e j + x j e j x j e j + x j ω e j 3 x = Σ x j e j j=1 e j = ω e j x x j e j + ω (x j e j ) = + ω x t 11
12 Rotating reference system For a rotary motion in a rotating reference system we have also for the coordinate vectors: So we have for every arbitrary vector x j e j + x j e j x j e j + x j ω e j Balance of angular momentum in a rotating reference system: 3 x = Σ x j e j j=1 dh = dt H t e j = ω e j x x j e j + ω (x j e j ) = + ω x t + ω H = L 12
13 Balance of angular momentum of a rotating solid body Balance of angular momentum in a rotating reference system: Angular momentum of a rotating solid body: + ω(t) H(t) = L(t) H(t) = I ω(t) 13
14 Balance of angular momentum of a rotating solid body Balance of angular momentum in a rotating reference system: Angular momentum of a rotating solid body: Assumption: Coordinate axes are principal axes: Then I has diagonal structure: (A < B < C: principal moments of inertia of the Earth) + ω(t) H(t) = L(t) H(t) = I ω(t) 14
15 Balance of angular momentum of a rotating solid body Balance of angular momentum in a rotating reference system: Angular momentum of a rotating solid body: Assumption: Coordinate axes are principal axes: Then I has diagonal structure: ω 1 ω 2 + ω(t) H(t) = L(t) H(t) = I ω(t) with ω = and L = expansion delivers L 1 L 2 ω 3 L 3 15
16 Balance of angular momentum of a rotating solid body Balance of angular momentum in a rotating reference system: Angular momentum of a rotating solid body: Equations of motion for the rotation of a rigid body in the principal coordinate system: + ω(t) H(t) = L(t) H(t) = I ω(t) A ω 1 + (C-B) ω 2 ω 3 = L 1 B ω 2 + (A-C) ω 3 ω 1 = L 2 C ω 3 + (B-A) ω 1 ω 2 = L 3 16






17 Euler s Equation of Motion 17 (Leonhard Euler: Painting by Emanuel Handmann, Switzerland) A ω 1 + (C-B) ω 2 ω 3 = L 1 B ω 2 + (A-C) ω 3 ω 1 = L 2 C ω 3 + (B-A) ω 1 ω 2 = L 3 Euler s equation of motion
18 From the rotating rigid body to a rotating deformable body Balance of angular momentum in the rotating reference system: Angular momentum of a rotating rigid body: Angular momentum of a rotating deformable body: with h(t) as relative angular momentum: N h(t) = Σ M i (r i v rel i ) i=1 + ω(t) H(t) = L(t) H(t) = I ω(t) H(t) = I(t)ω(t) + h(t) The relative angular momentum describes the effect of the motion of mass elements w.r.t. the reference system. 18
19 From the rotating rigid body to a rotating deformable body Balance of angular momentum in the rotating reference system: Angular momentum of a rotating rigid body: Angular momentum of a rotating deformable body: Euler-Liouville - Equation: + ω(t) H(t) = L(t) H(t) = I ω(t) H(t) = I(t)ω(t) + h(t) (I(t)ω(t) + h(t)) + ω(t) (I(t)ω(t) + h(t)) = L(t) t 19
20 Balance of angular momentum in the Earth system Model approaches for Earth rotation are based on the balance of angular momentum in an Earth-fixed coordinate system (Euler-Liouville Equation): with angular momentum L(t): I(t): h(t): ω(t): d dt external gravitational torques (Sun, Moon, planets) Earth s tensor of inertia relative angular momenta Earth rotation vector H() t + ω() t H() t = L() t H() t = I() t ω() t + h() t 20
21 Balance of angular momentum in the Earth system Model approaches for Earth rotation are based on the balance of angular momentum in an Earth-fixed coordinate system (Euler-Liouville Equation): with angular momentum L(t): I(t): h(t): ω(t): d dt external gravitational torques (Sun, Moon, planets) Earth s tensor of inertia relative angular momenta Earth rotation vector y + z x y x z 2 2 N i i i i i i 2 2 i i i i i i= symm. xi + yi H() t + ω() t H() t = L() t H() t = I() t ω() t + h() t I() t = M x + z y z 21
22 Balance of angular momentum in the Earth system Model approaches for Earth rotation are based on the balance of angular momentum in an Earth-fixed coordinate system (Euler-Liouville Equation): with angular momentum L(t): I(t): h(t): ω(t): d dt external gravitational torques (Sun, Moon, planets) Earth s tensor of inertia relative angular momenta Earth rotation vector I() t = I + Δ I() t 0 H() t + ω() t H() t = L() t H() t = I() t ω() t + h() t approximate tensor of the Earth (time-invariant) temporal variations due to dynamical processes 22
23 Balance of angular momentum in the Earth system Model approaches for Earth rotation are based on the balance of angular momentum in an Earth-fixed coordinate system (Euler-Liouville Equation): with angular momentum L(t): I(t): h(t): ω(t): d dt external gravitational torques (Sun, Moon, planets) Earth s tensor of inertia relative angular momenta Earth rotation vector H() t + ω() t H() t = L() t H() t = I() t ω() t + h() t A 0 c11( t) c12( t) c13( t) I() t = B + c () t c () t C symm. c33( t) 23
24 Balance of angular momentum in the Earth system Model approaches for Earth rotation are based on the balance of angular momentum in an Earth-fixed coordinate system (Euler-Liouville Equation): with angular momentum L(t): I(t): h(t): ω(t): d dt external gravitational torques (Sun, Moon, planets) Earth s tensor of inertia relative angular momenta Earth rotation vector H() t + ω() t H() t = L() t H() t = I() t ω() t + h() t N i= 1 ( rel ) h() t = M r() t v () t i i i 24
25 Balance of angular momentum in the Earth system Model approaches for Earth rotation are based on the balance of angular momentum in an Earth-fixed coordinate system (Euler-Liouville Equation): with angular momentum L(t): I(t): h(t): ω(t): d dt external gravitational torques (Sun, Moon, planets) Earth s tensor of inertia relative angular momenta Earth rotation vector H() t + ω() t H() t = L() t H() t = I() t ω() t + h() t m() 1 t ω() t = Ω m() 2 t mi << 1 1+ m 3( t) Ω 2π = s 25
26 Balance of angular momentum in the Earth system Model approaches for Earth rotation are based on the balance of angular momentum in an Earth-fixed coordinate system (Euler-Liouville Equation): with angular momentum L(t): I(t): h(t): ω(t): d dt external gravitational torques (Sun, Moon, planets) Earth s tensor of inertia relative angular momenta Earth rotation vector m() 1 t ω() t = Ω m() 2 t 1+ m 3( t) H() t + ω() t H() t = L() t H() t = I() t ω() t + h() t polar motion angular velocity, ΔUT / LOD 26




 GNSS Very Long")
27 Excursion: Earth rotation parameters The rotation of the Earth and its temporal variation are monitored by geodetic and astrometric observation systems since decades with very high accuracy. Satellite Laser Ranging (SLR) GNSS Very Long Baseline Interferometry (VLBI) 27
.")
28 Excursion: Earth rotation parameters The rotation of the Earth and its temporal variation are monitored by geodetic and astrometric observation systems since decades with very high accuracy. Observations of the orientation of the Earth axis and the angular velocity of the rotation are transformed into time series of Earth rotation parameters (ERP). Polar motion: Location of the axis of the CIP w.r.t. an Earth-fixed reference system IERS C04 CTP Conventional Terrestrial Pole 28

. Polar motion: Location of the axis of the CIP w.r.t. an Earth-fixed reference system IERS C04 IERS C04 Length-of-day (LOD): Related to the Earth s angular velocity.")
29 Excursion: Earth rotation parameters 29 The rotation of the Earth and its temporal variation are monitored by geodetic and astrometric observation systems since decades with very high accuracy. Observations of the orientation of the Earth axis and the angular velocity of the rotation are transformed into time series of Earth rotation parameters (ERP). Polar motion: Location of the axis of the CIP w.r.t. an Earth-fixed reference system IERS C04 IERS C04 Length-of-day (LOD): Related to the Earth s angular velocity. LOD = length of a solar day with respect to a nominal day of s (= 24 hours)
30 Observation of Earth rotation and its importance The rotation of the Earth and its temporal variation are monitored by geodetic and astrometric observation systems since decades with very high accuracy. Observations of the orientation of the Earth axis and the angular velocity of the rotation are transformed into time series of Earth rotation parameters (ERP). Precise knowledge of temporal variations of ERP is fundamental, a.o. for the realisation of time systems for the highly precise computation of geodetic reference frames in order to relate Earth-fixed and space-fixed coordinate systems for precise navigationon Earth and in space interesting for various disciplines of geosciences, since dynamic processes in the Earth system are reflected in the temporal variations of the ERP Analysis of ERP time series allows for conclusions with respect to processes and changes in the Earth system on various temporal scales 30
31 Polar motion: Signal characteristics Mainly beat of two oscillations: 365 days (annual oscillation) 434 days (Chandler oscillation) 31

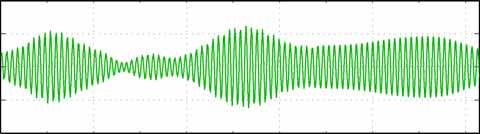

32 32 Polar motion: Signal characteristics x Component
33 Polar motion: Chandler oscillation Figure Axis ω Figure axis Rotation axis Free oscillation of rotation axis with respect to an Earth-fixed reference frame Period: Rigid Earth body: Euler-period (304 days) Non-rigid Earth body: Chandler-period (434 days) Free polar motion is superposed by forced polar motion 33


34 ERP integral quantities of the Earth system Variations are caused by a multitude of superposed effects (e.g. gravitational effects (torques, tides), dynamic processes in the Earth system involving the transport of masses in the Earth system) 34 [Ilk et al., 2005]
35 ERP integral quantities of the Earth system Variations are caused by a multitude of superposed effects (e.g. gravitational effects (torques, tides), dynamic processes in the Earth system involving the transport of masses in the Earth system) ERP provide an important information to the balance of angular momentum in the Earth system But: The time series do not allow for conclusions with respect to specific underlying processes without further knowledge The interpretation / separation of observed variations requires independent information from numerical model approaches 35





36 Effect of dynamic processes in the Earth system Displacement of mass elements temporal changes I(t) of the tensor of inertia mass term Motions of mass elements with respect to the reference system relative angular momentum h(t) motion term [Fig.: S. Böhm] 36
37 37 Expansion of the Euler-Liouville equation Ω
38 Expansion of the Euler-Liouville equation Assumptions: rotational symmetry of the Earth around its z-axis (A=B) products of small quantities (c ij, h i, m i ) and their derivatives are negligible A 1 2 m 1 + m2 = L Ω c23 Ωc 13 + Ωh2 h 1 Ω( C A) Ω ( C A) A 1 2 m 2 m1 = L 2 2 Ω c13 Ωc 23 + Ωh1 h 2 Ω( C A) Ω ( C A) 1 m 3 = Ωc33 h3 ΩC Components of the Earth rotation vector as functions of external torques, and mass redistributions and motions that are due to dynamical processes in the Earth system. 38
39 Expansion of the Euler-Liouville equation Assumptions: rotational symmetry of the Earth around its z-axis (A=B) products of small quantities (c ij, h i, m i ) and their derivatives are negligible A 1 2 m 1 + m2 = L Ω c23 Ωc 13 + Ωh2 h 1 Ω( C A) Ω ( C A) A 1 2 m 2 m1 = L 2 2 Ω c13 Ωc 23 + Ωh1 h 2 Ω( C A) Ω ( C A) 1 m 3 = Ωc33 h3 ΩC =Ψ 2 = Ψ 1 = Ψ 3 excitation functions 39 [Lambeck, 1980]
40 Expansion of the Euler-Liouville equation Assumptions: rotational symmetry of the Earth around its z-axis (A=B) products of small quantities (c ij, h i, m i ) and their derivatives are negligible A 1 2 m 1 + m2 = L Ω c23 Ωc 13 + Ωh2 h 1 Ω( C A) Ω ( C A) A 1 2 m 2 m1 = L 2 2 Ω c13 Ωc 23 + Ωh1 h 2 Ω( C A) Ω ( C A) A 1 = Ω( C A) σ r 1 m 3 = Ωc33 h3 ΩC (Euler-period = 304 days) 40 [Lambeck, 1980]
41 Expansion of the Euler-Liouville equation Assumptions: rotational symmetry of the Earth around its z-axis (A=B) products of small quantities (c ij, h i, m i ) and their derivatives are negligible A 1 2 m 1 + m2 = L Ω c23 Ωc 13 + Ωh2 h 1 Ω( C A) Ω ( C A) A 1 2 m 2 m1 = L 2 2 Ω c13 Ωc 23 + Ωh1 h 2 Ω( C A) Ω ( C A) 1 m 3 = Ωc33 h3 ΩC Solution of these equations for m i delivers the Earth rotation vector 41 [Lambeck, 1980]
42 Simple case: Rigid Earth body and no external forces 42 no variations of the tensor (c ij = 0) and no relative angular momenta (h i = 0) no external torques (L i = 0) m m 1 + m = 1 2 σ r 1 m = 2 1 σ r 0 0 m 3 = 0 A 1 = Ω( C A) σ r Ψ 1, Ψ 2, Ψ 3 = 0 (Euler-period = 304 days) [Lambeck, 1980]
43 Simple case: Rigid Earth body and no external forces no variations of the tensor (c ij = 0) and no relative angular momenta (h i = 0) no external torques (L i = 0) m m 1 + m = 1 2 σ r 1 m = 2 1 σ r 0 0 m 3 = 0 Ψ 1, Ψ 2, Ψ 3 = 0 no variation of the angular velocity (LOD = constant) 43
44 Simple case: Rigid Earth body and no external forces no variations of the tensor (c ij = 0) and no relative angular momenta (h i = 0) no external torques (L i = 0) m m 1 + m = 1 2 σ r 1 m = 2 1 σ r 0 0 Ψ 1, Ψ 2, Ψ 3 = 0 Complex formulation: m = m1+ im2 Im(m) x-component m 1 m 2 y-component 44 Re(m)
45 Simple case: Rigid Earth body and no external forces no variations of the tensor (c ij = 0) and no relative angular momenta (h i = 0) no external torques (L i = 0) m m 1 + m = 1 2 σ r 1 m = 2 1 σ r 0 0 Ψ 1, Ψ 2, Ψ 3 = 0 1 i m + m = σ r 0 45
 and no relative angular momenta (h i = 0) no external torques (L i = 0)")
")
46 Simple case: Rigid Earth body and no external forces no variations of the tensor (c ij = 0) and no relative angular momenta (h i = 0) no external torques (L i = 0) m m 1 + m = 1 2 σ r 1 m = 2 1 σ r Solution: i t m e σ r mt () = Ψ 1, Ψ 2, Ψ 3 = 0 1 i m + m = σ r 0 Undamped circular motion at frequency σ r (1 rev / 304 d) 46




47 Real case: Various dynamic processes in the Earth system influence Earth rotation Model approach: Development of physically consistent and comprehensive dynamic Earth models for the simulation of the Earth s rotational dynamics 47
48 Required information for modelling ERP Distribution and motion of mass elements in various components of the Earth system (atmosphere, ocean, hydrosphere, cryosphere, solid Earth, ): variations of the Earth s tensor of inertia relative angular momentum pressure related loading effects Ephemerides of Sun, Moon, external gravitational torques tidal deformations Geometrical, physical, and rheological parameters of the Earth (Earth ellipsoid, mean tensor of inertia, Love numbers, ) Model result is highly dependent on completeness of the effects considered in the model quality and consistency of the applied forcing model parameters 48
49 49 Forward model for Earth rotation [Seitz et al., GJI, 2004]
50 Forward model for Earth rotation back-coupling effect of polar motion transition from rotating rigid body to rotating deformable body direct influence on the model s Chandler oscillation 50 [Seitz et al., GJI, 2004]
51 Rotational deformation Temporal variations of the Earth s centrifugal potential cause redistributions of masses in the solid Earth and in the oceans: 2 3 Ω a ΔC 21( t) = ( R ( k2)m 1( t) +I( k2)m 2( t)) 3GM 2 3 Ω a ΔS 21( t) = ( R( k2)m 2( t) I( k2)m 1( t)) 3GM k = k + Δk + Δk * O A with the pole tide Love number. IERS-Conv. 2010: k 2 = i response of the solid Earth and the oceans considering mantle anelasicity 51
52 Rotational deformation Temporal variations of the Earth s centrifugal potential cause redistributions of masses in the solid Earth and in the oceans: ΔC 21( ) 2 3 Ω a ΔC 21( t) = ( R ( k2)m 1( t) +I( k2)m 2( t)) 3GM 2 3 Ω a ΔS 21( t) = ( R( k2)m 2( t) I( k2)m 1( t)) 3GM with the pole tide Love number. t 21 ΔS ( t) IERS-Conv. 2010: k 2 = i and are directly related to variations of the tensor of inertia ( ) c ()= t f ΔC ( t),δs ( t) ij k = k + Δk + Δk * O A and thus enter into the Euler-Liouville-Equation. 52
 Consideration of mantle")

53 Simulated free polar motion x-component Deformability of the Earth s body: Lengthening of the period of the free rotation from 304 to 432 days (Chandler-period) Consideration of mantle anelasticity: dissipation of energy due to friction Damping of the Chandler oscillation Without excitation the free polar motion would diminish within few decades (figure axis = rotation axis) 53
54 54 Forward model for Earth rotation [Seitz et al., GJI, 2004]
55 Model forcing Numerical values for ΔI(t) and h(t) are derived from model data of Earth system components, e.g. global atmospheric reanalyses of NCEP - assimilates meteorological observation data - atmospheric angular momentum from wind fields and surface pressure global ocean circulation model ECCO - forced by NCEP fields of wind stress, heat and freshwater fluxes - oceanic angular momentum from currents and water masses consistent representation of dynamics and mass transports in the subsystems atmosphere and ocean water, groundwater and snow fields from the global hydrological model LaD neglected: earthquakes, volcanoes, postglacial uplift, core/mantle, 55


56 Model results for polar motion x-component: corr.: 0,98; RMS-diff.: 29,5 mas y-component: corr.: 0,99; RMS-diff.: 23,3 mas 56
 Model")



57 Model results for polar motion ( ) Model forcing: NCEP + ECCO Full PM C01/C04 Chandler C01/C04 Corr-Coef.: 0.95 RMS-Diff.: 43.7 mas Corr-Coef.: 0.99 RMS-Diff.: 17.3 mas 57 [Seitz et al., JGR, 2012]
58 Dynamic processes and polar motion ftp://gemini.gsfc.nasa.gov
59 59 Variations of LOD
60 Dynamic processes and ΔLOD ftp://gemini.gsfc.nasa.gov
61 Summary Earth Rotation Parameters contain important information on geodynamic processes since the ERP are directly related to the balance of angular momentum in the Earth system. Angular momentum variations are linked to the motion and redistribution of masses in various components of the Earth system, and therefore a study of ERP allows for conclusions with respect to such processes. Interpretation of observed time series of ERP: Their integrative nature necessitates the development of advanced geophysical models in order to separate observations into individual effects. Current research topics: consideration of further system components in the simulations: can remaining gaps in the balance of angular momentum be closed? predictions on various time scales inverse modeling: Incorporation of ERP as constraints independent determination of mass transport processes from other observations (gravimetrical observations, altimetry, ) 61
62 Summary Earth Rotation Parameters contain important information on geodynamic processes since the ERP are directly related to the balance of angular momentum in the Earth system. Angular momentum variations are linked to the motion and redistribution of masses in various components of the Earth system, and therefore a study of ERP allows for conclusions with respect to such processes. Interpretation of observed time series of ERP: Their integrative nature necessitates the development of advanced geophysical models in order to separate observations into individual effects. Current research topics: consideration of further system components in the simulations: can remaining gaps in the balance of angular momentum be closed? predictions on various time scales inverse modeling: Incorporation of ERP as constraints independent determination of mass transport processes from other observations (gravimetrical observations, altimetry, ) 62

 in Satellite Application Engineering at the TU Munich, Germany")


63 Technische Universität München ESPACE: Earth Oriented Space Science and Technology An International 2-years Master s program (M.Sc.) in Satellite Application Engineering at the TU Munich, Germany Combines spacecraft engineering with its applications within one interdisciplinary program Three study lines: Earth System Science from Space Remote Sensing Satellite Navigation Spacecraft Engineering Earth System Science Remote Sensing Navigation ESPACE MSc in Earth Oriented Space Science and Technology

 Research Institutions: (German Aerospace Center (DLR), German Geodetic Research")
64 ESPACE: Cooperating Institutions Technische Universität München Munich has a unique concentration of know-how related to Space Science and Technology! ESPACE is coordinated at the TUM with teaching staff from: 3 Universities: (TUM, LMU, Univ. of Federal Armed Forces) Research Institutions: (German Aerospace Center (DLR), German Geodetic Research Institute (DGFI)) ESPACE MSc in Earth Oriented Space Science and Technology
65 ESPACE: Admission Technische Universität München Admission is highly competitive! Above average Bachelor or Diploma degree from an internationally recognized university in Science or Engineering such as: mathematics, physics, informatics, mechanical/electrical/aerospace engineering, geodesy, geophysics, Proof of English: TOEFL, IELTS or equivalent APS certificate Interview (Skype or in person) Application period for the winter term (starting each year in October) is from December until mid-march (non-eu citizens) ESPACE MSc in Earth Oriented Space Science and Technology
 At least one year of studies abroad Graduates obtain two Master s Degrees: M. Sc.")
66 Technische Universität München ESPACE: Double Degree with the Wuhan University China s most prominent and largest university in the fields of Geodesy, Geo-information and Remote Sensing Duration: 3 years in total (i.e. one more year than the regular ESPACE program) At least one year of studies abroad Graduates obtain two Master s Degrees: M. Sc. from the TUM and M.Sc. from the WHU ESPACE MSc in Earth Oriented Space Science and Technology



67 Technische Universität München We hope to see you in Munich!! ESPACE MSc in Earth Oriented Space Science and Technology
Contribution of non-tidal oceanic mass variations to Earth rotation determined from space geodesy and ocean data
 Earth FOR584 rotation Earth and rotation global and dynamic global processes dynamic processes Contribution of non-tidal oceanic mass variations to Earth rotation determined from space geodesy and ocean
Earth FOR584 rotation Earth and rotation global and dynamic global processes dynamic processes Contribution of non-tidal oceanic mass variations to Earth rotation determined from space geodesy and ocean
ATMOSPHERIC AND OCEANIC EXCITATION OF EARTH ROTATION
 ATMOSPHERIC AND OCEANIC EXCITATION OF EARTH ROTATION S. BÖHM, T. NILSSON, M. SCHINDELEGGER, H. SCHUH Institute of Geodesy and Geophysics, Advanced Geodesy Vienna University of Technology Gußhausstraße
ATMOSPHERIC AND OCEANIC EXCITATION OF EARTH ROTATION S. BÖHM, T. NILSSON, M. SCHINDELEGGER, H. SCHUH Institute of Geodesy and Geophysics, Advanced Geodesy Vienna University of Technology Gußhausstraße
Note: This is the accepted manuscript and may marginally differ from the published version.
 Originally published as: Seitz, F.; Stuck, J.; Thomas, M.: White noise Chandler wobble excitation. In: Plag, H. P.; Chao, B.; Gross, R.; van Dam, T. (eds.) Forcing of polar motion in the Chandler frequency
Originally published as: Seitz, F.; Stuck, J.; Thomas, M.: White noise Chandler wobble excitation. In: Plag, H. P.; Chao, B.; Gross, R.; van Dam, T. (eds.) Forcing of polar motion in the Chandler frequency
Fundamental Station Wettzell - geodetic observatory -
 Fundamental Station Wettzell - geodetic observatory - Wolfgang Schlüter Bundesamt für Kartographie und Geodäsie, Fundamental Station Wettzell Germany Radiometer Workshop, Wettzell, 10.10.06 Evolvement
Fundamental Station Wettzell - geodetic observatory - Wolfgang Schlüter Bundesamt für Kartographie und Geodäsie, Fundamental Station Wettzell Germany Radiometer Workshop, Wettzell, 10.10.06 Evolvement
The Global Geodetic Observing System (GGOS) of the International Association of Geodesy (IAG)
 of the International Association of Geodesy (IAG)") The Global Geodetic Observing System (GGOS) of the International Association of Geodesy (IAG) Hermann Drewes Representative of the International Union of Geodesy and Geophysics (IUGG) to the Cartographic
The Global Geodetic Observing System (GGOS) of the International Association of Geodesy (IAG) Hermann Drewes Representative of the International Union of Geodesy and Geophysics (IUGG) to the Cartographic
The final publication is available at Springer. DOI: / _6
 Originally published as: Seitz, F., H. Schuh: Earth Rotation. In: Sciences of Geodesy I: Advances and Future Directions, Xu, G. (Ed.), 185 227, Springer, Heidelberg, ISBN 978 3 642 11744, 21. The final
Originally published as: Seitz, F., H. Schuh: Earth Rotation. In: Sciences of Geodesy I: Advances and Future Directions, Xu, G. (Ed.), 185 227, Springer, Heidelberg, ISBN 978 3 642 11744, 21. The final
Torsten Mayer-Gürr Institute of Geodesy, NAWI Graz Technische Universität Graz
 GGOS and Reference Systems Introduction 2015-10-12 Torsten Mayer-Gürr Institute of Geodesy, NAWI Graz Technische Universität Graz Torsten Mayer-Gürr 1 Course and exam Lecture Monday 14:00 16:00, A111 (ST01044)
GGOS and Reference Systems Introduction 2015-10-12 Torsten Mayer-Gürr Institute of Geodesy, NAWI Graz Technische Universität Graz Torsten Mayer-Gürr 1 Course and exam Lecture Monday 14:00 16:00, A111 (ST01044)
Originally published as:
 Originally published as: Winkelnkemper, T., F. Seitz: Simulation of historic and future atmospheric angular momentum effects on length of day variations with GCMs. In: Observing our Changing Earth, Sideris,
Originally published as: Winkelnkemper, T., F. Seitz: Simulation of historic and future atmospheric angular momentum effects on length of day variations with GCMs. In: Observing our Changing Earth, Sideris,
Earth rotation and Earth gravity field from GRACE observations. Lucia Seoane, Christian Bizouard, Daniel Gambis
 Earth rotation and Earth gravity field from GRACE observations Lucia Seoane, Christian Bizouard, Daniel Gambis Observatoire de Paris SYRTE, 61 av. de l'observatoire, 7514 Paris Introduction Gravity field
Earth rotation and Earth gravity field from GRACE observations Lucia Seoane, Christian Bizouard, Daniel Gambis Observatoire de Paris SYRTE, 61 av. de l'observatoire, 7514 Paris Introduction Gravity field
GG S. Internal Vision of GGOS. Markus Rothacher. GFZ Potsdam
 Internal Vision of GGOS Markus Rothacher GFZ Potsdam GGOS Retreat DGFI in Munich February 15-16, 2006 Contents Motivation Four Levels of Products of the IAG Services: First Level: Raw Data Collection Second
Internal Vision of GGOS Markus Rothacher GFZ Potsdam GGOS Retreat DGFI in Munich February 15-16, 2006 Contents Motivation Four Levels of Products of the IAG Services: First Level: Raw Data Collection Second
The Global Geodetic Observing System (GGOS) of the International Association of Geodesy, IAG
 of the International Association of Geodesy, IAG") The Global Geodetic Observing System (GGOS) of the International Association of Geodesy, IAG Hans-Peter Plag (1), Markus Rothacher (2), Richard Gross (3), Srinivas Bettadpur (4) (1) Nevada Bureau of Mines
The Global Geodetic Observing System (GGOS) of the International Association of Geodesy, IAG Hans-Peter Plag (1), Markus Rothacher (2), Richard Gross (3), Srinivas Bettadpur (4) (1) Nevada Bureau of Mines
Assessment of the International Terrestrial Reference System 2014 realizations by Precise Orbit Determination of SLR Satellites
 Deutsches Geodätisches Forschungsinstitut (DGFI-TUM) Technische Universität München Assessment of the International Terrestrial Reference System 2014 realizations by Precise Orbit Determination of SLR
Deutsches Geodätisches Forschungsinstitut (DGFI-TUM) Technische Universität München Assessment of the International Terrestrial Reference System 2014 realizations by Precise Orbit Determination of SLR
Relationships between mass redistribution, station position, geocenter, and Earth rotation: Results from IGS GNAAC analysis
 Relationships between mass redistribution, station position, geocenter, and Earth rotation: Results from IGS GNAAC analysis Geoff Blewitt Mackay School of Earth Sciences and Engineering University of Nevada,
Relationships between mass redistribution, station position, geocenter, and Earth rotation: Results from IGS GNAAC analysis Geoff Blewitt Mackay School of Earth Sciences and Engineering University of Nevada,
Hydrological Mass Variations due to Extreme Weather Conditions in Central Europe from Regional GRACE 4D Expansions
 Hydrological Mass Variations due to Extreme Weather Conditions in Central Europe from Regional GRACE 4D Expansions Florian Seitz 1, Michael Schmidt 2, C.K. Shum 3, Yiqun Chen 3 1 Earth Oriented Space Science
Hydrological Mass Variations due to Extreme Weather Conditions in Central Europe from Regional GRACE 4D Expansions Florian Seitz 1, Michael Schmidt 2, C.K. Shum 3, Yiqun Chen 3 1 Earth Oriented Space Science
A Unique Reference Frame: Basis of the Global Geodetic Observing System (GGOS) for Geodynamics and Global Change
 for Geodynamics and Global Change") SRTM (InSAR) A Unique Reference Frame: Basis of the Global Geodetic Observing System (GGOS) for Geodynamics and Global Change Hermann Drewes President IAG Commission 1 Reference Frames Deutsches Geodätisches
SRTM (InSAR) A Unique Reference Frame: Basis of the Global Geodetic Observing System (GGOS) for Geodynamics and Global Change Hermann Drewes President IAG Commission 1 Reference Frames Deutsches Geodätisches
3.6 ITRS Combination Centres
 3 Reports of IERS components 3.6.1 Deutsches Geodätisches Forschungsinstitut (DGFI) In 2010, the focus of the ITRS Combination Centre at DGFI was on the finalization of the ITRS realization DTRF2008, internal
3 Reports of IERS components 3.6.1 Deutsches Geodätisches Forschungsinstitut (DGFI) In 2010, the focus of the ITRS Combination Centre at DGFI was on the finalization of the ITRS realization DTRF2008, internal
Geodätische Woche The global radiational S1 tide - current Earth rotation research at TU Wien. September 17, 2015
 Geodätische Woche 2015 A. Girdiuk, M. Schindelegger, J. Böhm / TU Wien / Geodätische Woche 2015 1/14 - current Earth rotation research at TU Wien A. Girdiuk, M. Schindelegger, J. Böhm TU Wien, Geodesy
Geodätische Woche 2015 A. Girdiuk, M. Schindelegger, J. Böhm / TU Wien / Geodätische Woche 2015 1/14 - current Earth rotation research at TU Wien A. Girdiuk, M. Schindelegger, J. Böhm TU Wien, Geodesy
DGFI Report No. 84. Earth rotation variations from geometric, gravimetric and altimetric observations and geophysical models
 DGFI Report No. 84 Earth rotation variations from geometric, gravimetric and altimetric observations and geophysical models FRANZISKA GÖTTL Deutsches Geodätisches Forschungsinstitut Alfons Goppel Str.,
DGFI Report No. 84 Earth rotation variations from geometric, gravimetric and altimetric observations and geophysical models FRANZISKA GÖTTL Deutsches Geodätisches Forschungsinstitut Alfons Goppel Str.,
The Rotational and Gravitational Signature of Recent Great Earthquakes
 The Rotational and Gravitational Signature of Recent Great Earthquakes Richard S. Gross Jet Propulsion Laboratory California Institute of Technology Pasadena, CA 91109 8099, USA 7th IVS General Meeting
The Rotational and Gravitational Signature of Recent Great Earthquakes Richard S. Gross Jet Propulsion Laboratory California Institute of Technology Pasadena, CA 91109 8099, USA 7th IVS General Meeting
Strategy for the Realization of the International Height Reference System (IHRS)
") Deutsches Geodätisches Forschungsinstitut (DGFI-TUM) Technische Universität München Strategy for the Realization of the International Height Reference System (IHRS) Laura Sánchez 1, Johannes Ihde 2, Roland
Deutsches Geodätisches Forschungsinstitut (DGFI-TUM) Technische Universität München Strategy for the Realization of the International Height Reference System (IHRS) Laura Sánchez 1, Johannes Ihde 2, Roland
Perturbed Earth rotation. L. D. Akulenko, S. A. Kumakshev, and A. M. Shmatkov
 Perturbed Earth rotation L. D. Akulenko, S. A. Kumakshev, and A. M. Shmatkov 1 Introduction Numerous astrometric studies are based on the dynamic theory of the Earth s rotation with respect to the center
Perturbed Earth rotation L. D. Akulenko, S. A. Kumakshev, and A. M. Shmatkov 1 Introduction Numerous astrometric studies are based on the dynamic theory of the Earth s rotation with respect to the center
1/30. Rigid Body Rotations. Dave Frank
 . 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
. 1/3 Rigid Body Rotations Dave Frank A Point Particle and Fundamental Quantities z 2/3 m v ω r y x Angular Velocity v = dr dt = ω r Kinetic Energy K = 1 2 mv2 Momentum p = mv Rigid Bodies We treat a rigid
Astronomy 6570 Physics of the Planets
 Astronomy 6570 Physics of the Planets Planetary Rotation, Figures, and Gravity Fields Topics to be covered: 1. Rotational distortion & oblateness 2. Gravity field of an oblate planet 3. Free & forced planetary
Astronomy 6570 Physics of the Planets Planetary Rotation, Figures, and Gravity Fields Topics to be covered: 1. Rotational distortion & oblateness 2. Gravity field of an oblate planet 3. Free & forced planetary
Physics 106a, Caltech 4 December, Lecture 18: Examples on Rigid Body Dynamics. Rotating rectangle. Heavy symmetric top
 Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
El proyecto Sistema de Observación Geodésico Global [Global Geodetic Observing System (GGOS)] de la Asociación Internacional de Geodesia (IAG)
![El proyecto Sistema de Observación Geodésico Global [Global Geodetic Observing System (GGOS)] de la Asociación Internacional de Geodesia (IAG)](/thumbs/79/79010389.jpg "El proyecto Sistema de Observación Geodésico Global [Global Geodetic Observing System (GGOS)] de la Asociación Internacional de Geodesia (IAG)") El proyecto Sistema de Observación Geodésico Global [Global Geodetic Observing System (GGOS)] de la Asociación Internacional de Geodesia (IAG) Hermann Drewes Deutsches Geodätisches Forschungsinstitut (DGFI)
El proyecto Sistema de Observación Geodésico Global [Global Geodetic Observing System (GGOS)] de la Asociación Internacional de Geodesia (IAG) Hermann Drewes Deutsches Geodätisches Forschungsinstitut (DGFI)
Surface Mass Loads from GRACE, GPS, and Earth Rotation
 Surface Mass Loads from GRACE,, and Earth Rotation R. Gross *, G. Blewitt, H.-P. Plag, P. Clarke, D. Lavallée, T. van Dam *Jet Propulsion Laboratory, California Institute of Technology, Pasadena, USA Nevada
Surface Mass Loads from GRACE,, and Earth Rotation R. Gross *, G. Blewitt, H.-P. Plag, P. Clarke, D. Lavallée, T. van Dam *Jet Propulsion Laboratory, California Institute of Technology, Pasadena, USA Nevada
Astronomy 6570 Physics of the Planets. Precession: Free and Forced
 Astronomy 6570 Physics of the Planets Precession: Free and Forced Planetary Precession We have seen above how information concerning the distribution of density within a planet (in particular, the polar
Astronomy 6570 Physics of the Planets Precession: Free and Forced Planetary Precession We have seen above how information concerning the distribution of density within a planet (in particular, the polar
Principles of the Global Positioning System Lecture 18" Mathematical models in GPS" Mathematical models used in GPS"
 12.540 Principles of the Global Positioning System Lecture 18" Prof. Thomas Herring" Room 54-820A; 253-5941" tah@mit.edu" http://geoweb.mit.edu/~tah/12.540 " Mathematical models in GPS" Review assignment
12.540 Principles of the Global Positioning System Lecture 18" Prof. Thomas Herring" Room 54-820A; 253-5941" tah@mit.edu" http://geoweb.mit.edu/~tah/12.540 " Mathematical models in GPS" Review assignment
Anna Korbacz 1, Aleksander Brzeziński 1 and Maik Thomas 2. Journées Systèmes de référence spatio-temporels.
 Geophysical excitation of LOD/UT1 estimated from the output of the global circulation models of the atmosphere - ERA-4 reanalysis and of the ocean - OMCT Anna Korbacz 1, Aleksander Brzeziński 1 and Maik
Geophysical excitation of LOD/UT1 estimated from the output of the global circulation models of the atmosphere - ERA-4 reanalysis and of the ocean - OMCT Anna Korbacz 1, Aleksander Brzeziński 1 and Maik
Atmospheric Effects in Space Geodesy
 Atmospheric Effects in Space Geodesy Johannes Böhm 18 November 2011 @ UNESP, Presidente Prudente, Brazil The atmosphere.. is not only causing troubles in space geodesy.. but it opens up a wide field of
Atmospheric Effects in Space Geodesy Johannes Böhm 18 November 2011 @ UNESP, Presidente Prudente, Brazil The atmosphere.. is not only causing troubles in space geodesy.. but it opens up a wide field of
GG S Global Geodetic Observing System (GGOS): Status and Future. Markus Rothacher, Ruth Neilan, Hans-Peter Plag
: Status and Future. Markus Rothacher, Ruth Neilan, Hans-Peter Plag") 2020 Global Geodetic Observing System (GGOS): Status and Future Markus Rothacher, Ruth Neilan, Hans-Peter Plag GeoForschungsZentrum Potsdam (GFZ) Jet Propulsion Laboratory (JPL) University of Nevada, Reno
2020 Global Geodetic Observing System (GGOS): Status and Future Markus Rothacher, Ruth Neilan, Hans-Peter Plag GeoForschungsZentrum Potsdam (GFZ) Jet Propulsion Laboratory (JPL) University of Nevada, Reno
Recent Advances in High Resolution Rotation Sensing
 Recent Advances in High Resolution Rotation Sensing U. Schreiber 1,2, A. Gebauer 1, R. Hurst 2, J.-P. Wells 2 1 Forschungseinrichtung Satellitengeodäsie, Technische Universität München, Germany 2 Department
Recent Advances in High Resolution Rotation Sensing U. Schreiber 1,2, A. Gebauer 1, R. Hurst 2, J.-P. Wells 2 1 Forschungseinrichtung Satellitengeodäsie, Technische Universität München, Germany 2 Department
State-of-the-art physical models for calculating atmospheric pressure loading effects
 State-of-the-art physical models for calculating atmospheric pressure loading effects Dudy D. Wijaya, Böhm J., Schindelegger M., Karbon M., Schuh H. Institute of Geodesy and Geophysics, TU Vienna Geodätische
State-of-the-art physical models for calculating atmospheric pressure loading effects Dudy D. Wijaya, Böhm J., Schindelegger M., Karbon M., Schuh H. Institute of Geodesy and Geophysics, TU Vienna Geodätische
Frequent epoch reference frames instead of instant station positions and constant velocities
 Deutsches Geodätisches Forschungsinstitut Technische Universität München (DGFI-TUM) Frequent epoch reference frames instead of instant station positions and constant velocities Hermann Drewes Deutsches
Deutsches Geodätisches Forschungsinstitut Technische Universität München (DGFI-TUM) Frequent epoch reference frames instead of instant station positions and constant velocities Hermann Drewes Deutsches
Interaction between tidal terms and GPS orbits
 Interaction between tidal terms and GPS orbits Natalia Panafidina, Manuela Seitz, Urs Hugentobler Deutsches Geodätisches Forschungsinstitut (DGFI) Centrum für Geodätische Erdsystemforschung (CGE) München
Interaction between tidal terms and GPS orbits Natalia Panafidina, Manuela Seitz, Urs Hugentobler Deutsches Geodätisches Forschungsinstitut (DGFI) Centrum für Geodätische Erdsystemforschung (CGE) München
MAE 142 Homework #5 Due Friday, March 13, 2009
 MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
Common Realization of Terrestrial and Celestial Reference Frame
 Common Realization of Terrestrial and Celestial Reference Frame M. Seitz, R. Heinkelmann, P. Steigenberger, T. Artz Abstract The realization of the International Celestial Reference System (ICRS) and the
Common Realization of Terrestrial and Celestial Reference Frame M. Seitz, R. Heinkelmann, P. Steigenberger, T. Artz Abstract The realization of the International Celestial Reference System (ICRS) and the
GGOS Bureau for Standards and Conventions
 GGOS D. Angermann (1), T. Gruber (2), J. Bouman (1), M. Gerstl (1), R. Heinkelmann (1), U. Hugentobler (2), L. Sánchez (1), P. Steigenberger (2) (1) Deutsches Geodätisches Forschungsinstitut (DGFI), München
GGOS D. Angermann (1), T. Gruber (2), J. Bouman (1), M. Gerstl (1), R. Heinkelmann (1), U. Hugentobler (2), L. Sánchez (1), P. Steigenberger (2) (1) Deutsches Geodätisches Forschungsinstitut (DGFI), München
MASS TRANSPORT AND MASS DISTRIBUTION IN THE EARTH SYSTEM
 MASS TRANSPORT AND MASS DISTRIBUTION IN THE EARTH SYSTEM Jakob Flury (1) and Reiner Rummel (1) (1) German GOCE Project Bureau Institute for Astronomical and Physical Geodesy Technische Universität München,
MASS TRANSPORT AND MASS DISTRIBUTION IN THE EARTH SYSTEM Jakob Flury (1) and Reiner Rummel (1) (1) German GOCE Project Bureau Institute for Astronomical and Physical Geodesy Technische Universität München,
GOCE. Gravity and steady-state Ocean Circulation Explorer
 GOCE Gravity and steady-state Ocean Circulation Explorer Reiner Rummel Astronomical and Physical Geodesy Technische Universität München rummel@bv.tum.de ESA Earth Observation Summerschool ESRIN/Frascati
GOCE Gravity and steady-state Ocean Circulation Explorer Reiner Rummel Astronomical and Physical Geodesy Technische Universität München rummel@bv.tum.de ESA Earth Observation Summerschool ESRIN/Frascati
Rigid bodies - general theory
 Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Can we see evidence of post-glacial geoidal adjustment in the current slowing rate of rotation of the Earth?
 Can we see evidence of post-glacial geoidal adjustment in the current slowing rate of rotation of the Earth? BARRETO L., FORTIN M.-A., IREDALE A. In this simple analysis, we compare the historical record
Can we see evidence of post-glacial geoidal adjustment in the current slowing rate of rotation of the Earth? BARRETO L., FORTIN M.-A., IREDALE A. In this simple analysis, we compare the historical record
Introduction Fundamental definitions Motivation
 1 Introduction Fundamental definitions Motivation 1.1 Rotation and global shape of the Earth At a very elementary level, the Earth is considered to be an axially symmetric ellipsoid, rotating with uniform
1 Introduction Fundamental definitions Motivation 1.1 Rotation and global shape of the Earth At a very elementary level, the Earth is considered to be an axially symmetric ellipsoid, rotating with uniform
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
(Polar Motion, PM) ERP Vol.29, No PROGRESS IN ASTRONOMY Jul., (2011) P183.3 ( )
 ERP Vol.29, No PROGRESS IN ASTRONOMY Jul., (2011) P183.3 ( )") 29 3 Vol29, No 3 2011 7 PROGRESS IN ASTRONOMY Jul, 2011 1000-8349(201103-343-10 AR ( 410083 AR 3 X Y AR P1833 A 1 (Polar Motion, PM [1] X Y (LOD (ERP [2] ERP ( VLBI SLR GPS ERP ERP [3 5] ERP ERP [6] ERP
29 3 Vol29, No 3 2011 7 PROGRESS IN ASTRONOMY Jul, 2011 1000-8349(201103-343-10 AR ( 410083 AR 3 X Y AR P1833 A 1 (Polar Motion, PM [1] X Y (LOD (ERP [2] ERP ( VLBI SLR GPS ERP ERP [3 5] ERP ERP [6] ERP
Prof. E. Calais Purdue University - EAS Department CIVL 3273
 Prof. E. Calais Purdue University - EAS Department CIVL 3273 ecalais@purdue.edu GPS Geodesy - Spring 2008 Geoid of Western Hemisphere. Image from University of Texas Center for Space Research and NASA.
Prof. E. Calais Purdue University - EAS Department CIVL 3273 ecalais@purdue.edu GPS Geodesy - Spring 2008 Geoid of Western Hemisphere. Image from University of Texas Center for Space Research and NASA.
Influence of subdaily tidal model on station coordinates and GPS orbits
 DFG Research Unit Space-Time Reference Systems for Monitoring Global Change and for Precise Navigation in Space Influence of subdaily tidal model on station coordinates and GPS orbits N. Panafidina, U.
DFG Research Unit Space-Time Reference Systems for Monitoring Global Change and for Precise Navigation in Space Influence of subdaily tidal model on station coordinates and GPS orbits N. Panafidina, U.
SIRGAS: Basis for Geosciences, Geodata, and Navigation in Latin America
 SIRGAS: Basis for Geosciences, Geodata, and Navigation in Latin America Claudio Brunini President of SIRGAS Universidad Nacional de La Plata, Argentina María Virginia Mackern President of SIRGAS/WG-I:
SIRGAS: Basis for Geosciences, Geodata, and Navigation in Latin America Claudio Brunini President of SIRGAS Universidad Nacional de La Plata, Argentina María Virginia Mackern President of SIRGAS/WG-I:
OBSERVING AND MODELING LONG-PERIOD TIDAL VARIATIONS IN POLAR MOTION
 OBSERVING AND MODELING LONG-PERIOD TIDAL VARIATIONS IN POLAR MOTION R.S. GROSS 1, S.R. DICKMAN 2 1 Jet Propulsion Laboratory, California Institute of Technology 4800 Oak Grove Drive, Pasadena, CA 91109,
OBSERVING AND MODELING LONG-PERIOD TIDAL VARIATIONS IN POLAR MOTION R.S. GROSS 1, S.R. DICKMAN 2 1 Jet Propulsion Laboratory, California Institute of Technology 4800 Oak Grove Drive, Pasadena, CA 91109,
Lecture 38: Equations of Rigid-Body Motion
 Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
Lecture 38: Equations of Rigid-Body Motion It s going to be easiest to find the equations of motion for the object in the body frame i.e., the frame where the axes are principal axes In general, we can
2 so that the (time-dependent) torque, as measured in space-xed coordinates, is ~N = ma2! 2 (^x cos!t +^y sin!t) 10 = a p 5 2 ^z ~ F 2 ~F 1 = a p 5^z
 torque, as measured in space-xed coordinates, is ~N = ma2! 2 (^x cos!t +^y sin!t) 10 = a p 5 2 ^z ~ F 2 ~F 1 = a p 5^z") 1 PHYS 321 Homework Assignment #9 Due: Friday, 22 November 2002 (4 probs) 1. Problem 7-14, B&O p. 280. The situation is as shown above. We take the body-xed axes ^x 0 and ^y 0 to lie in the plane of the
1 PHYS 321 Homework Assignment #9 Due: Friday, 22 November 2002 (4 probs) 1. Problem 7-14, B&O p. 280. The situation is as shown above. We take the body-xed axes ^x 0 and ^y 0 to lie in the plane of the
Lecture 41: Highlights
 Lecture 41: Highlights The goal of this lecture is to remind you of some of the key points that we ve covered this semester Note that this is not the complete set of topics that may appear on the final
Lecture 41: Highlights The goal of this lecture is to remind you of some of the key points that we ve covered this semester Note that this is not the complete set of topics that may appear on the final
The global S 1 tide and Earth s nutation
 Journées 2014 St. Petersburg 22 24 September Michael SCHINDELEGGER Johannes BÖHM, David SALSTEIN The global S 1 tide and Earth s nutation Session 4: Earth s rotation and geodynamics Motivation & Background
Journées 2014 St. Petersburg 22 24 September Michael SCHINDELEGGER Johannes BÖHM, David SALSTEIN The global S 1 tide and Earth s nutation Session 4: Earth s rotation and geodynamics Motivation & Background
Revision of the physical backgrounds of Earth s rotation
 Revision of the physical backgrounds of Earth s rotation L. Völgyesi Budapest University of Technology and Economics, H-151 Budapest, Müegyetem rkp. 3. Hungary e-mail: lvolgyesi@epito.bme.hu bstract. Rotation
Revision of the physical backgrounds of Earth s rotation L. Völgyesi Budapest University of Technology and Economics, H-151 Budapest, Müegyetem rkp. 3. Hungary e-mail: lvolgyesi@epito.bme.hu bstract. Rotation
Consistent dynamic satellite reference frames and terrestrial geodetic datum parameters - status report PN 6 -
 Deutsches Geodätisches Forschungsinstitut (DGFI-TUM) Technische Universität München Consistent dynamic satellite reference frames and terrestrial geodetic datum parameters - status report PN 6 - Mathis
Deutsches Geodätisches Forschungsinstitut (DGFI-TUM) Technische Universität München Consistent dynamic satellite reference frames and terrestrial geodetic datum parameters - status report PN 6 - Mathis
The JCET/GSFC (SLR) TRF Solution 2004
 TRF Solution 2004") The JCET/GSFC (SLR) TRF Solution 2004 JCET and NASA Goddard Space Flight Center Univ. of Maryland Baltimore County Baltimore, Maryland (epavlis@jcet.umbc.edu) IERS Workshop 2004: IERS Combination Pilot
The JCET/GSFC (SLR) TRF Solution 2004 JCET and NASA Goddard Space Flight Center Univ. of Maryland Baltimore County Baltimore, Maryland (epavlis@jcet.umbc.edu) IERS Workshop 2004: IERS Combination Pilot
Rotation and Interior of Terrestrial Planets
 Rotation and Interior of Terrestrial Planets Veronique Dehant and Tim Van Hoolst Royal Observatory of Belgium introduction WHAT DO WE KNOW ABOUT THE MEAN ROTATION AND INTERIOR OF THE PLANETS? Orbit, rotation
Rotation and Interior of Terrestrial Planets Veronique Dehant and Tim Van Hoolst Royal Observatory of Belgium introduction WHAT DO WE KNOW ABOUT THE MEAN ROTATION AND INTERIOR OF THE PLANETS? Orbit, rotation
Summary of the 2012 Global Geophysical Fluid Center Workshop
 Summary of the 2012 Global Geophysical Fluid Center Workshop T. van Dam (Uni. Lux), J. Ray (NGS/NOAA), X. Collilieux (IGN) Introduction Review the history of the GGFC Discuss the 2012 Workshop Review recommendations
Summary of the 2012 Global Geophysical Fluid Center Workshop T. van Dam (Uni. Lux), J. Ray (NGS/NOAA), X. Collilieux (IGN) Introduction Review the history of the GGFC Discuss the 2012 Workshop Review recommendations
Earth orientation parameters: excitation by atmosphere, oceans and geomagnetic jerks
 Earth orientation parameters: excitation by atmosphere, oceans and geomagnetic jerks Jan Vondrák and Cyril Ron, Astronomical Inst., Czech Academy of Sciences, Prague Contents: Introduction; Description
Earth orientation parameters: excitation by atmosphere, oceans and geomagnetic jerks Jan Vondrák and Cyril Ron, Astronomical Inst., Czech Academy of Sciences, Prague Contents: Introduction; Description
Impact of Earth Radiation Pressure on LAGEOS Orbits and on the Global Scale
 13-Po-22 Impact of Earth Radiation Pressure on LAGEOS Orbits and on the Global Scale Krzysztof Sośnica (1), Carlos Javier Rodríguez-Solano (2), Daniela Thaller (3), Adrian Jäggi (1), Rolf Dach (1), Gerhard
13-Po-22 Impact of Earth Radiation Pressure on LAGEOS Orbits and on the Global Scale Krzysztof Sośnica (1), Carlos Javier Rodríguez-Solano (2), Daniela Thaller (3), Adrian Jäggi (1), Rolf Dach (1), Gerhard
Towards a Rigorous Combination of Space Geodetic Techniques
 Towards a Rigorous Combination of Space Geodetic Techniques Markus Rothacher Forschungseinrichtung Satellitengeodäsie, TU Munich, Germany Abstract: The with all its different components and products, ranging
Towards a Rigorous Combination of Space Geodetic Techniques Markus Rothacher Forschungseinrichtung Satellitengeodäsie, TU Munich, Germany Abstract: The with all its different components and products, ranging
Very Long Baseline Interferometry for Geodesy and Astrometry
 Very Long Baseline Interferometry for Geodesy and Astrometry Johannes Böhm Harald Schuh and Johannes Böhm, Very Long Baseline Interferometry for Geodesy and Astrometry, in Guochang Xu (editor): Sciences
Very Long Baseline Interferometry for Geodesy and Astrometry Johannes Böhm Harald Schuh and Johannes Böhm, Very Long Baseline Interferometry for Geodesy and Astrometry, in Guochang Xu (editor): Sciences
Towards an improved ILRS TRF contribution
 Towards an improved ILRS TRF contribution Erricos C. Pavlis ILRS Analysis Coordinator JCET/ & NASA Goddard IERS Workshop on Conventions 2007 20-21 Sept. 2007, Sèvres, France Overview The ILRS Network Geometry
Towards an improved ILRS TRF contribution Erricos C. Pavlis ILRS Analysis Coordinator JCET/ & NASA Goddard IERS Workshop on Conventions 2007 20-21 Sept. 2007, Sèvres, France Overview The ILRS Network Geometry
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E S 8-9 Part B, Lectures 8-9 23 March, 2017 C O N T E N T S In this lecture, we will look at factors that cause an orbit to change over time orbital
AS3010: Introduction to Space Technology L E C T U R E S 8-9 Part B, Lectures 8-9 23 March, 2017 C O N T E N T S In this lecture, we will look at factors that cause an orbit to change over time orbital
GGOS INFORMATION MODELS: ANALYSIS OF INTERRELATIONS BETWEEN OBSERVATION TECHNIQUES AND THE EARTH GRAVITY FIELD
 GGOS INFORMATION MODELS: ANALYSIS OF INTERRELATIONS BETWEEN OBSERVATION TECHNIQUES AND THE EARTH GRAVITY FIELD Wojciech Pachelski 1) Małgorzata Paśnicka-Pawłowska 2) Karolina Szafranek 3) Agnieszka Zwirowicz
GGOS INFORMATION MODELS: ANALYSIS OF INTERRELATIONS BETWEEN OBSERVATION TECHNIQUES AND THE EARTH GRAVITY FIELD Wojciech Pachelski 1) Małgorzata Paśnicka-Pawłowska 2) Karolina Szafranek 3) Agnieszka Zwirowicz
Direct measurement of diurnal polar motion by ring laser gyroscopes
 JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 109,, doi:10.1029/2003jb002803, 2004 Direct measurement of diurnal polar motion by ring laser gyroscopes K. U. Schreiber, A. Velikoseltsev, and M. Rothacher Forschungseinrichtung
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 109,, doi:10.1029/2003jb002803, 2004 Direct measurement of diurnal polar motion by ring laser gyroscopes K. U. Schreiber, A. Velikoseltsev, and M. Rothacher Forschungseinrichtung
Introduction to geodetic VLBI
 Introduction to geodetic VLBI David Mayer Andreas Hellerschmied Johannes Böhm Harald Schuh and Johannes Böhm, Very Long Baseline Interferometry for Geodesy and Astrometry, in Guochang Xu (editor): Sciences
Introduction to geodetic VLBI David Mayer Andreas Hellerschmied Johannes Böhm Harald Schuh and Johannes Böhm, Very Long Baseline Interferometry for Geodesy and Astrometry, in Guochang Xu (editor): Sciences
1 General Definitions and Numerical Standards
 This chapter provides general definitions for some topics and the values of numerical standards that are used in the document. Those are based on the most recent reports of the appropriate working groups
This chapter provides general definitions for some topics and the values of numerical standards that are used in the document. Those are based on the most recent reports of the appropriate working groups
GGOS The Global Geodetic Observing System of the International Association of Geodesy
 GGOS The Global Geodetic Observing System of the International Association of Geodesy Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland Hansjörg Kutterer BKG, Germany Content
GGOS The Global Geodetic Observing System of the International Association of Geodesy Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland Hansjörg Kutterer BKG, Germany Content
Very Long Baseline Interferometry for Geodesy and Astrometry
 VieVS User-Workshop 2017 Very Long Baseline Interferometry for Geodesy and Astrometry Johannes Böhm VLBI How does it work? VLBI a flowchart SINEX skd vex2 drudge drudge snp/prc snp/prc NGS Mark4 Mark4
VieVS User-Workshop 2017 Very Long Baseline Interferometry for Geodesy and Astrometry Johannes Böhm VLBI How does it work? VLBI a flowchart SINEX skd vex2 drudge drudge snp/prc snp/prc NGS Mark4 Mark4
MATHEMATICAL PHYSICS
 MATHEMATICAL PHYSICS Third Year SEMESTER 1 015 016 Classical Mechanics MP350 Prof. S. J. Hands, Prof. D. M. Heffernan, Dr. J.-I. Skullerud and Dr. M. Fremling Time allowed: 1 1 hours Answer two questions
MATHEMATICAL PHYSICS Third Year SEMESTER 1 015 016 Classical Mechanics MP350 Prof. S. J. Hands, Prof. D. M. Heffernan, Dr. J.-I. Skullerud and Dr. M. Fremling Time allowed: 1 1 hours Answer two questions
Geodetic Observing Systems: tools in observing the Glacial Isostatic Adjustment. Markku Poutanen Finnish Geodetic Institute
 Geodetic Observing Systems: tools in observing the Glacial Isostatic Adjustment Markku Poutanen Finnish Geodetic Institute Glacial Isostatic Adjustment Land uplift is just one consequence of the physical
Geodetic Observing Systems: tools in observing the Glacial Isostatic Adjustment Markku Poutanen Finnish Geodetic Institute Glacial Isostatic Adjustment Land uplift is just one consequence of the physical
Evaluation of the accuracy of the IAU 2006/2000 precession-nutation
 Evaluation of the accuracy of the IAU 2006/2000 precession-nutation Nicole Capitaine (1), Sébastien Lambert (1), Kunliang Yao (1), Jia-cheng Liu (1)(2) (1) SYRTE, Observatoire de Paris, France (2) Nanjing
Evaluation of the accuracy of the IAU 2006/2000 precession-nutation Nicole Capitaine (1), Sébastien Lambert (1), Kunliang Yao (1), Jia-cheng Liu (1)(2) (1) SYRTE, Observatoire de Paris, France (2) Nanjing
Global vertical datum unification based on the combination of the fixed gravimetric and the scalar free geodetic boundary value problems
 Global vertical datum unification based on the combination of the fixed gravimetric and the scalar free geodetic boundary value problems Laura Sánchez contribution to the IAG-IC.: Vertical Reference Frames
Global vertical datum unification based on the combination of the fixed gravimetric and the scalar free geodetic boundary value problems Laura Sánchez contribution to the IAG-IC.: Vertical Reference Frames
ESTIMATION OF NUTATION TERMS USING GPS
 ESTIMATION OF NUTATION TERMS USING GPS Markus Rothacher, Gerhard Beutler Astronomical Institute, University of Berne CH-3012 Berne, Switzerland ABSTRACT Satellite space-geodetic measurements have been
ESTIMATION OF NUTATION TERMS USING GPS Markus Rothacher, Gerhard Beutler Astronomical Institute, University of Berne CH-3012 Berne, Switzerland ABSTRACT Satellite space-geodetic measurements have been
arxiv: v1 [astro-ph.ep] 12 Dec 2016
![arxiv: v1 [astro-ph.ep] 12 Dec 2016](/thumbs/94/118262213.jpg "arxiv: v1 [astro-ph.ep] 12 Dec 2016") Astronomy & Astrophysics manuscript no. manuscript_arxiv c ESO 2018 December 20, 2018 Frequency-dependent tidal dissipation in a viscoelastic Saturnian core and expansion of Mimas semi-major axis arxiv:1612.03664v1
Astronomy & Astrophysics manuscript no. manuscript_arxiv c ESO 2018 December 20, 2018 Frequency-dependent tidal dissipation in a viscoelastic Saturnian core and expansion of Mimas semi-major axis arxiv:1612.03664v1
Originally published as:
 Originally published as: Seitz M., Steigenberger P., Artz T. (2xx) Consistent adjustment of combined terrestrial and celestial reference frames, Earth on the Edge: Science for a Sustainable Planet, IAG
Originally published as: Seitz M., Steigenberger P., Artz T. (2xx) Consistent adjustment of combined terrestrial and celestial reference frames, Earth on the Edge: Science for a Sustainable Planet, IAG
Angular Momentum. Objectives CONSERVATION OF ANGULAR MOMENTUM
 Angular Momentum CONSERVATION OF ANGULAR MOMENTUM Objectives Calculate the angular momentum vector for a moving particle Calculate the angular momentum vector for a rotating rigid object where angular
Angular Momentum CONSERVATION OF ANGULAR MOMENTUM Objectives Calculate the angular momentum vector for a moving particle Calculate the angular momentum vector for a rotating rigid object where angular
Dynamics. Dynamics of mechanical particle and particle systems (many body systems)
") Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Chapter 11. Angular Momentum
 Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
Chapter 11 Angular Momentum Angular Momentum Angular momentum plays a key role in rotational dynamics. There is a principle of conservation of angular momentum. In analogy to the principle of conservation
System of Geodetic Parameters Parametry Zemli 1990 PZ-90.11
 System of Geodetic Parameters Parametry Zemli 1990 PZ-90.11 Authors: PhD Anastasiya N. Zueva, PhD Evgeniy V. Novikov, Dr. Dmitriy I. Pleshakov, PhD Igor V. Gusev Speaker: Igor Gusev 9 th Mee'ng of the
System of Geodetic Parameters Parametry Zemli 1990 PZ-90.11 Authors: PhD Anastasiya N. Zueva, PhD Evgeniy V. Novikov, Dr. Dmitriy I. Pleshakov, PhD Igor V. Gusev Speaker: Igor Gusev 9 th Mee'ng of the
expression that describes these corrections with the accuracy of the order of 4. frame usually connected with extragalactic objects.
 RUSSIAN JOURNAL OF EARTH SCIENCES, English Translation, VOL, NO, DECEMBER 998 Russian Edition: JULY 998 On the eects of the inertia ellipsoid triaxiality in the theory of nutation S. M. Molodensky Joint
RUSSIAN JOURNAL OF EARTH SCIENCES, English Translation, VOL, NO, DECEMBER 998 Russian Edition: JULY 998 On the eects of the inertia ellipsoid triaxiality in the theory of nutation S. M. Molodensky Joint
Dynamics. Basilio Bona. Semester 1, DAUIN Politecnico di Torino. B. Bona (DAUIN) Dynamics Semester 1, / 18
 Dynamics Semester 1, / 18") Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Ph1a: Solution to the Final Exam Alejandro Jenkins, Fall 2004
 Ph1a: Solution to the Final Exam Alejandro Jenkins, Fall 2004 Problem 1 (10 points) - The Delivery A crate of mass M, which contains an expensive piece of scientific equipment, is being delivered to Caltech.
Ph1a: Solution to the Final Exam Alejandro Jenkins, Fall 2004 Problem 1 (10 points) - The Delivery A crate of mass M, which contains an expensive piece of scientific equipment, is being delivered to Caltech.
Assessment of the orbit-related sea level error budget for the TOPEX/Poseidon altimetry mission
 Assessment of the orbit-related sea level error budget for the TOPEX/Poseidon altimetry mission Sergei Rudenko (1,2), Saskia Esselborn (1), Tilo Schöne (1) (1) GFZ German Research Centre for Geosciences,
Assessment of the orbit-related sea level error budget for the TOPEX/Poseidon altimetry mission Sergei Rudenko (1,2), Saskia Esselborn (1), Tilo Schöne (1) (1) GFZ German Research Centre for Geosciences,
EART162: PLANETARY INTERIORS
 EART162: PLANETARY INTERIORS Francis Nimmo Last Week Applications of fluid dynamics to geophysical problems Navier-Stokes equation describes fluid flow: Convection requires solving the coupled equations
EART162: PLANETARY INTERIORS Francis Nimmo Last Week Applications of fluid dynamics to geophysical problems Navier-Stokes equation describes fluid flow: Convection requires solving the coupled equations
Roadmap Towards Future Satellite Gravity Missions in Support of Monitoring of Mass Redistribution, Global Change, and Natural Hazards
 Roadmap Towards Future Satellite Gravity Missions in Support of Monitoring of Mass Redistribution, Global Change, and Natural Hazards STRATEGIC TARGET A multi-decade, continuous series of space-based observations
Roadmap Towards Future Satellite Gravity Missions in Support of Monitoring of Mass Redistribution, Global Change, and Natural Hazards STRATEGIC TARGET A multi-decade, continuous series of space-based observations
17. SIGNATURE OF EL NINO IN LENGTH OF DAY AS MEASURED BY VLBI
 17. SIGNATURE OF EL NINO IN LENGTH OF DAY AS MEASURED BY VLBI John M. Gipson, NVI Inc./GSFC, Greenbelt, MD Chopo Ma, Goddard Spaceflight Center, Greenbelt, MD INTRODUCTION Very Long Baseline Interferometry
17. SIGNATURE OF EL NINO IN LENGTH OF DAY AS MEASURED BY VLBI John M. Gipson, NVI Inc./GSFC, Greenbelt, MD Chopo Ma, Goddard Spaceflight Center, Greenbelt, MD INTRODUCTION Very Long Baseline Interferometry
SLR and the Gravity Field
 SLR and the Gravity Field Daniela Thaller With contributions by: Krzysztof Sośnica (University of Wroclaw, Poland) Mathis Bloßfeld (DGFI-TUM, Germany) Gravity Field Determination Dedicated gravity field
SLR and the Gravity Field Daniela Thaller With contributions by: Krzysztof Sośnica (University of Wroclaw, Poland) Mathis Bloßfeld (DGFI-TUM, Germany) Gravity Field Determination Dedicated gravity field
PHYSICS. Course Structure. Unit Topics Marks. Physical World and Measurement. 1 Physical World. 2 Units and Measurements.
 PHYSICS Course Structure Unit Topics Marks I Physical World and Measurement 1 Physical World 2 Units and Measurements II Kinematics 3 Motion in a Straight Line 23 4 Motion in a Plane III Laws of Motion
PHYSICS Course Structure Unit Topics Marks I Physical World and Measurement 1 Physical World 2 Units and Measurements II Kinematics 3 Motion in a Straight Line 23 4 Motion in a Plane III Laws of Motion
Warkworth geodetic station as a potential GGOS core site in New Zealand
 "Launching the Next-Generation IVS Network Session 2: Correlators, Stations and Operations Centers. 7th IVS General Meeting March 5, 2012 Madrid, Spain Warkworth geodetic station as a potential GGOS core
"Launching the Next-Generation IVS Network Session 2: Correlators, Stations and Operations Centers. 7th IVS General Meeting March 5, 2012 Madrid, Spain Warkworth geodetic station as a potential GGOS core
Manipulator Dynamics 2. Instructor: Jacob Rosen Advanced Robotic - MAE 263D - Department of Mechanical & Aerospace Engineering - UCLA
 Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Geodesy and interior structure of Mercury
 Geodesy and interior structure of Mercury Tim Van Hoolst and the ROB planets team Royal Observatory of Belgium February 26, 2007 Outline 1 Tidal potential Potential Response 2 Interior structure models
Geodesy and interior structure of Mercury Tim Van Hoolst and the ROB planets team Royal Observatory of Belgium February 26, 2007 Outline 1 Tidal potential Potential Response 2 Interior structure models
If the symmetry axes of a uniform symmetric body coincide with the coordinate axes, the products of inertia (Ixy etc.
 Prof. O. B. Wright, Autumn 007 Mechanics Lecture 9 More on rigid bodies, coupled vibrations Principal axes of the inertia tensor If the symmetry axes of a uniform symmetric body coincide with the coordinate
Prof. O. B. Wright, Autumn 007 Mechanics Lecture 9 More on rigid bodies, coupled vibrations Principal axes of the inertia tensor If the symmetry axes of a uniform symmetric body coincide with the coordinate
Physical Dynamics (SPA5304) Lecture Plan 2018
 Lecture Plan 2018") Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Torge Geodesy. Unauthenticated Download Date 1/9/18 5:16 AM
 Torge Geodesy Wolfgang Torge Geodesy Second Edition W DE G Walter de Gruyter Berlin New York 1991 Author Wolfgang Torge, Univ. Prof. Dr.-Ing. Institut für Erdmessung Universität Hannover Nienburger Strasse
Torge Geodesy Wolfgang Torge Geodesy Second Edition W DE G Walter de Gruyter Berlin New York 1991 Author Wolfgang Torge, Univ. Prof. Dr.-Ing. Institut für Erdmessung Universität Hannover Nienburger Strasse
Interaction between subdaily Earth rotation parameters and GPS orbits Natalia Panafidina, Urs Hugentobler, Manuela Seitz
 Interaction between subdaily Earth rotation parameters and GPS orbits Natalia Panafidina, Urs Hugentobler, Manuela Seitz Deutsches Geodätisches Forschungsinstitut (DGFI) Centrum für Geodätische Erdsystemforschung
Interaction between subdaily Earth rotation parameters and GPS orbits Natalia Panafidina, Urs Hugentobler, Manuela Seitz Deutsches Geodätisches Forschungsinstitut (DGFI) Centrum für Geodätische Erdsystemforschung
arxiv:physics/ v1 30 Jun 2004
 JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 109, B06405, doi:10.1029/2003jb002803, 2004 arxiv:physics/0406156 v1 30 Jun 2004 Direct measurement of diurnal polar motion by ring laser gyroscopes K. U. Schreiber,
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 109, B06405, doi:10.1029/2003jb002803, 2004 arxiv:physics/0406156 v1 30 Jun 2004 Direct measurement of diurnal polar motion by ring laser gyroscopes K. U. Schreiber,
Analysis Strategies And Software For Geodetic VLBI
 Analysis Strategies And Software For Geodetic VLBI Rüdiger Haas Presentation at the 7th EVN Symposium, Toledo, 2004 Outline: Observing stategies and observables Data analysis strategies Data analysis software
Analysis Strategies And Software For Geodetic VLBI Rüdiger Haas Presentation at the 7th EVN Symposium, Toledo, 2004 Outline: Observing stategies and observables Data analysis strategies Data analysis software
Torque and Rotation Lecture 7
 Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension
Torque and Rotation Lecture 7 ˆ In this lecture we finally move beyond a simple particle in our mechanical analysis of motion. ˆ Now we consider the so-called rigid body. Essentially, a particle with extension