EE C245 ME C218 Introduction to MEMS Design
|
|
|
- Mervin Williamson
- 6 years ago
- Views:
Transcription
1 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA Lecture 21: Gyros & Capacitive Transducers EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 1
2 Lecture Outline Reading: Senturia, Chpt. 5, Chpt. 6, Chpt. 21 Lecture Topics: Project: Gyroscopes Deep Reactive-Ion Etching (revisited) Energy Conserving Transducers Charge g Control Voltage Control Parallel-Plate Capacitive Transducers Linearizing Capacitive Actuators Electrical Stiffness Electrostatic Comb-Drive 1 st Order Analysis 2 nd Order Analysis EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 2
3 Gyroscopes EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 3
4 Classic Spinning Gyroscope A gyroscope measures rotation rate, which then gives orientation very important, of course, for navigation Principle i of operation based on conservation of momentum Example: classic spinning gyroscope Rotor will preserve its angular momentum (i.e., will maintain its axis of spin) despite rotation of its gimbled chassis EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 4
5 Vibratory Gyroscopes Generate momentum by vibrating structures Again, conservation of momentum leads to mechanisms for measuring rotation ti rate and orientation ti Example: vibrating mass in a rotating frame y Driven into vibration along the y-axis Mass at rest y Get an x component x x of motion C(t) Rotate 30 o C(t 2 ) > C(t 1 ) C(t 1 ) C(t 2 ) y-displaced mass Capacitance between mass and frame = constant EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 5




6 Basic Vibratory Gyroscope Operation Principle of Operation Tuning Fork Gyroscope: Input Rotation a r c Coriolis () Response z Ω r Driven f o v r Coriolis Torque x z y EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 6
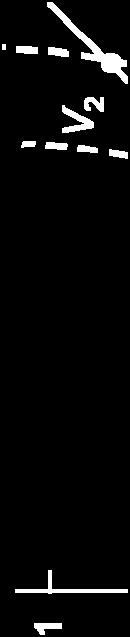
7 Basic Vibratory Gyroscope Operation Principle of Operation Tuning Fork Gyroscope: Input Rotation a r c Coriolis () Response Coriolis Torque z Ω r Driven f o x v r Am mplitude Coriolis Acceleration Coriolis Force Drive/ Response Spectra: Drive Response r x Driven Velocity r r r a c = 2v Ω r F k r ma f o (@ T 1 ) c c c z 2 k ω r y Coriolis Displacement = = Beam Stiffness = Response Rotation Rate r a Beam Mass ω Frequency EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 7
8 Vibratory Gyroscope Performance Principle of Operation Tuning Fork Gyroscope: Input Rotation z Driven f o r x = r F k c = Beam Mass r ma k c r a = ω Beam Stiffness c 2 r Frequency r r r a c = 2v Ω Driven Velocity Ω r a r v r To maximize the output signal x, c need: Large sense-axis mass Small sense-axis stiffness p (Above together mean low resonance frequency) Large drive amplitude for large driven velocity (so use comb- drive) z If can match drive freq. to y sense freq., then can amplify output by Q times Coriolis () Response Coriolis Torque x EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 8

![] Tuning Fork Gyroscope [Draper Labs.] 3.](/docs-images/78/78248207/images/9-1.jpg "2 mm Nuclear Magnetic Resonance Gyro [NIST]")
![[Najafi, Michigan] Laser Polarizer 1 mm Rb/Xe Cell](/docs-images/78/78248207/images/9-2.jpg "Photodiode 1 mm θ & t EE C245: Introduction to MEMS")
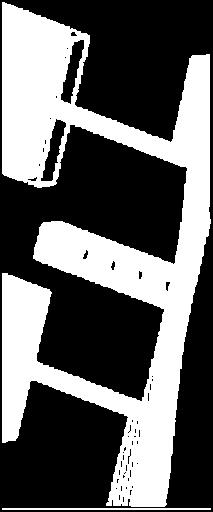
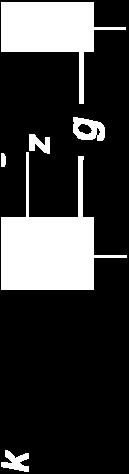
9 MEMS-Based Gyroscopes Vibrating Ring Gyroscope Tuning Fork Gyroscope [Ayazi, GA Tech.] Tuning Fork Gyroscope [Draper Labs.] 3.2 mm Nuclear Magnetic Resonance Gyro [NIST] [Najafi, Michigan] Laser Polarizer 1 mm Rb/Xe Cell Photodiode 1 mm θ & t EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 9









10 MEMS-Based Tuning Fork Gyroscope Drive Electrode Tuning Tuning Drive Electrode Di Drive Mode Md Quadrature Cancellation In-plane pan drive and sense modes pick pc up z-axis rotations Mode-matching for maximum output sensitivity From [Zaman, Ayazi, et al, MEMS 06] Mode EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 10
")

![Ayazi, et al, MEMS 06] Drive](/docs-images/78/78248207/images/11-6.jpg "Oscillation Sustaining Amplifier")

11 MEMS-Based Tuning Fork Gyroscope Ω r z Tuning Drive Voltage Signal (-) Output Current (+) Output Current Tuning Drive Electrode Drive [Zaman, Ayazi, et al, MEMS 06] Drive Oscillation Sustaining Amplifier Differential TransR Amplifier EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 11
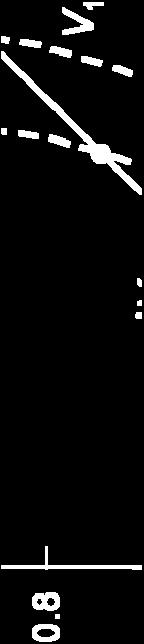
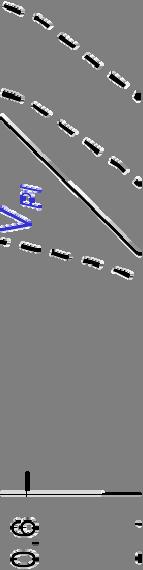
12 MEMS-Based Tuning Fork Gyroscope Drive and sense axes must be stable or at least track one another to avoid output drift Drive Electrode Tuning Quadrature Cancellation Need: small or matched drive and sense axis temperature coefficients to suppress drift Amplitu ude Tuning Drive Electrode Drive Drive Response Problem: if drive frequency changes relative to sense frequency, output changes bias drift T 1 Response EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 12 T 2 f o (@ T 1 ) f o (@ T 2 ) ω
13 Mode Matching for Higher Resolution For higher resolution, can try to match drive and sense axis resonance frequencies and benefit from Q amplification Drive Electrode Tuning Problem: mismatch between drive and sense frequencies even larger drift! Tuning Drive Electrode Drive T 1 Response Quadrature Cancellation Need: small or matched drive and sense axis temperature coefficients to make this work Amplitu ude Drive Response EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 13 T 2 f o (@ T 1 ) f o (@ T 2 ) ω
14 Issue: Zero Rate Bias Error Imbalances in the system can lead to zero rate bias error Quadrature Cancellation Di Drive Electrode Tuning Tuning Drive Electrode Mass imbalance off-axis motion of the proof mass Quadrature Cancellation Drive imbalance off-axis motion of the proof mass Output signal in phase with the Coriolis acceleration Quadrature output signal that can be confused with the Coriolis acceleration EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 14
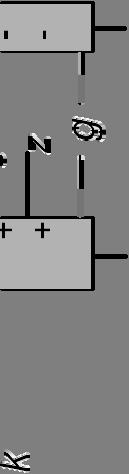
15 Nuclear Magnetic Res. Gyroscope The ultimate in miniaturized spinning gyroscopes? from CSAC, we may now have the technology to do this -20º 0º Better if this is a noble gas nucleus (rather than e-), since nuclei are heavier less susceptible to B field 20º Soln: Spin polarize Xe 129 nuclei by first polarizing e- of Rb 87 (a la CSAC), then allowing spin exchange Atoms Aligned Nuclear Spins -20º 0º 20º 3.2 mm Challenge: suppressing the effects of B field Laser Polarizer Rb/Xe Cell Photodiode 1 mm θ & t 1 mm EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 15
16 MEMS-Based Tuning Fork Gyroscope Ω r z Tuning Drive Voltage Signal (-) Output Current (+) Output Current Tuning Drive Electrode Drive [Zaman, Ayazi, et al, MEMS 06] Drive Oscillation Sustaining Amplifier Differential TransR Amplifier EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 16
17 Deep Reactive-Ion Etching EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 17
 The")


: SF")






18 Deep Reactive-Ion Etching (DRIE) The Bosch process: Inductively-coupled plasma Etch Rate: μm/min Two main cycles in the etch: Etch cycle (5-15 s): SF 6 (SF x+ ) etches Si Deposition cycle: (5-15 s): C 4 F 8 deposits fluorocarbon protective polymer (CF 2- ) n Etch mask selectivity: SiO 2 ~ 200:1 Photoresist ~ 100:1 Issue: finite sidewall roughness scalloping < 50 nm Sidewall angle: 90 o ±2 o EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 18
19 DRIE Issues: Etch Rate Variance Etch rate is diffusion-limited and drops for narrow trenches Adjust mask layout to eliminate large disparities Adjust process parameters (slow down the etch rate to that governed by the slowest feature) Etch rate decreases with trench width EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 19
 etch practically just stops when it reaches SiO 2 Problem: Lateral undercut at Si/SiO 2")
 potential")

20 DRIE Issues: Footing Etch depth precision Etch stop: buried layer of SiO 2 Due to 200:1 selectivity, the (vertical) etch practically just stops when it reaches SiO 2 Problem: Lateral undercut at Si/SiO 2 interface footing Caused by charge accumulation at the insulator Poor charge relaxation and lack of neutralization of e - s at insulator Ion flux into substrate bt t bild builds up (+) potential Charging-induced potential perturbs the E-field Distorts the ion trajectory Result: strong and localized damage to the structure at Si-SiO 2 interface footing EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 20
21 Recipe-Based Suppression of Footing Use higher process pressure to reduce ion charging [Nozawa] High operating pressure concentration of (-) ions increases and can neutralize (+) surface charge Issue: must introduce as a separate recipe when the etch reaches the Si-insulator interface, so must be able to very accurately predict the time needed for etching Adjust etch recipe to reduce overetching [Schmidt] Change C 4F 8 flow rate, pressure, etc., to enhance passivation and reduce overetching Issue: Difficult to simultaneously control footing in a narrow trench and prevent grass in wide trenches Use lower frequency plasma to avoid surface charging [Morioka] Low frequency more ions with low directionality and kinetic energy neutralizes (-) potential barrier at trench entrance Allows e - s to reach the trench base and neutralize (+) charge maintain charge balance inside the trench EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 21
")

")





 Remove metal")
 Metallize EE")
22 Metal Interlayer to Prevent Footing (a) Photolithography 1 (f) Silicon Thinning (sacrificial) (b) Preparatory trenches (g) Photolithography 2 (c) Metal interlayer deposition (h) DRIE Pre-defined metal interlayer grounded to substrate supplies e s to neutralize (+) charge and prevent charge accumulation at the Si-insulator interface (d) Lift-off (remove PR) (i) Remove metal interlayer (e) Anodic Bonding (i) Metallize EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 22
 Below: DRIE footing over an oxide stop layer")


23 Footing Prevention (cont.) Below: DRIE footing over an oxide stop layer Right: efficacy of the metal interlayer footing prevention approach [Kim, Stanford] No metal interlayer Footing No footing With metal interlayer [Kim, Seoul Nat. Univ.] EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 23



![Rockwell]](/docs-images/78/78248207/images/24-3.jpg "Microgripper")

![Instruments]](/docs-images/78/78248207/images/24-5.jpg "EE C245:")

24 DRIE Examples High aspectratio gear Tunable Capacitor [Yao, Rockwell] Microgripper [Keller, MEMS Precision Instruments] EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 24
25 Energy Conserving Transducers EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 25


 =")


26 Basic Physics of Electrostatic Actuation Goal: Determine gap spacing g as a function of input variables First, need to determine the energy of the system Two ways to change the energy: Change the charge q Change the separation g ΔW(q,g) = VΔq + F e Δg dw = Vdq + F e dg Note: We assume that the plates are supported elastically, so they don t collapse EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 26






27 Here, the stored energy is the work done in increasing the gap after charging capacitor at zero gap Stored Energy EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 27

28 Having found stored energy, we can now find the force acting on the plates and the voltage across them: Charge-Control Case + - V EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 28
29 Voltage-Control Case Practical situation: We control V Charge control on the typical sub-pf MEMS actuation capacitor is difficult Need to find F e as a partial derivative of the stored energy W = W(V,g) with respect to g with V held constant? But can t do this with present W(q,g) formula Solution: Apply Legendre transformation and define the co-energy W (V,g) ) EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 29




30 Co-Energy Formulation For our present problem (i.e., movable capacitive plates), the co-energy formulation becomes EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 30
31 Electrostatic Force (Voltage Control) Find co-energy in terms of voltage Variation of co-energy with respect to gap yields electrostatic force: Variation of co-energy with respect to voltage yields charge: EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 31
32 Spring-Suspended Suspended Capacitive Plate EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 32





33 Charge Control of a Spring-Suspended C I EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 33
34 Voltage Control of a Spring-Suspended C EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 34
35 Stability Analysis Net attractive force on the plate: An increment in gap dg leads to an increment in net attractive force df net EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 35
36 Pull-In Voltage V PI V PI = voltage at which the plates collapse The plate goes unstable when (1) and (2) Substituting (1) into (2): When a gap is driven by a voltage to (2/3) its original spacing, collapse will occur! EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 36







37 Voltage-Controlled Plate Stability Graph Below: Plot of normalized electrostatic and spring forces vs. normalized displacement 1-(g/g o ) Spring Force Forces Electrical Forces Stable Equilibrium Points Increasing V Normalized Displacement EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 37
38 Advantages of Electrostatic Actuators Easy to manufacture in micromachining processes, since conductors and air gaps are all that s needed low cost! Energy conserving only parasitic energy loss through I 2 R losses in conductors and interconnects Variety of geometries available that allow tailoring of the relationships between voltage, force, and displacement Electrostatic forces can become very large when dimensions shrink electrostatics scales well! Same capacitive structures can be used for both drive and sense of velocity or displacement Simplicity of transducer greatly reduces mechanical energy losses, allowing the highest Q s for resonant structures EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 38
39 Problems With Electrostatic Actuators Nonlinear voltage-to-force transfer function Relatively weak compared with other transducers (e.g., piezoelectric), but things get better as dimensions scale EE C245: Introduction to MEMS Design Lecture 21 C. Nguyen 11/13/08 39
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 22: Capacitive
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 22: Capacitive
Regents of the University of California
 Deep Reactive-Ion Etching (DRIE) DRIE Issues: Etch Rate Variance The Bosch process: Inductively-coupled plasma Etch Rate: 1.5-4 μm/min Two main cycles in the etch: Etch cycle (5-15 s): SF 6 (SF x+ ) etches
Deep Reactive-Ion Etching (DRIE) DRIE Issues: Etch Rate Variance The Bosch process: Inductively-coupled plasma Etch Rate: 1.5-4 μm/min Two main cycles in the etch: Etch cycle (5-15 s): SF 6 (SF x+ ) etches
EE C245 ME C218 Introduction to MEMS Design Fall 2007
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 11: Bulk
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 11: Bulk
EE C245 ME C218 Introduction to MEMS Design Fall 2007
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 12: Mechanics
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 12: Mechanics
EE C245 ME C218 Introduction to MEMS Design Fall 2007
 EE C45 ME C8 Introduction to MEMS Design Fall 007 Prof. Clark T.C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 3: Input Modeling
EE C45 ME C8 Introduction to MEMS Design Fall 007 Prof. Clark T.C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 3: Input Modeling
EE C247B ME C218 Introduction to MEMS Design Spring 2016
 EE C47B ME C18 Introduction to MEMS Design Spring 016 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture EE C45:
EE C47B ME C18 Introduction to MEMS Design Spring 016 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture EE C45:
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 20: Equivalent
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 20: Equivalent
EE C245 ME C218 Introduction to MEMS Design
 EE C45 ME C18 Introduction to MEMS Design Fall 008 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 6: Output
EE C45 ME C18 Introduction to MEMS Design Fall 008 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 6: Output
EE C245 / ME C218 INTRODUCTION TO MEMS DESIGN FALL 2009 PROBLEM SET #7. Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory.
: Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory.") Issued: Thursday, Nov. 24, 2009 PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Issued: Thursday, Nov. 24, 2009 PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
EE C245 ME C218 Introduction to MEMS Design
 EE C45 ME C8 Introduction to MEMS Design Fall 007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 5: Output t
EE C45 ME C8 Introduction to MEMS Design Fall 007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 5: Output t
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 23: Electrical
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 23: Electrical
EE C245 ME C218 Introduction to MEMS Design Fall 2011
 EE C245 ME C218 Introduction to MEMS Design Fall 2011 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture EE C245:
EE C245 ME C218 Introduction to MEMS Design Fall 2011 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture EE C245:
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 19: Resonance
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 19: Resonance
Etching Issues - Anisotropy. Dry Etching. Dry Etching Overview. Etching Issues - Selectivity
 Etching Issues - Anisotropy Dry Etching Dr. Bruce K. Gale Fundamentals of Micromachining BIOEN 6421 EL EN 5221 and 6221 ME EN 5960 and 6960 Isotropic etchants etch at the same rate in every direction mask
Etching Issues - Anisotropy Dry Etching Dr. Bruce K. Gale Fundamentals of Micromachining BIOEN 6421 EL EN 5221 and 6221 ME EN 5960 and 6960 Isotropic etchants etch at the same rate in every direction mask
EE C245 / ME C218 INTRODUCTION TO MEMS DESIGN FALL 2011 C. Nguyen PROBLEM SET #7. Table 1: Gyroscope Modeling Parameters
 Issued: Wednesday, Nov. 23, 2011. PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 8, 2011, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Issued: Wednesday, Nov. 23, 2011. PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 8, 2011, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
EECS C245 ME C218 Midterm Exam
 University of California at Berkeley College of Engineering EECS C245 ME C218 Midterm Eam Fall 2003 Prof. Roger T. Howe October 15, 2003 Dr. Thara Srinivasan Guidelines Your name: SOLUTIONS Circle your
University of California at Berkeley College of Engineering EECS C245 ME C218 Midterm Eam Fall 2003 Prof. Roger T. Howe October 15, 2003 Dr. Thara Srinivasan Guidelines Your name: SOLUTIONS Circle your
E SC 412 Nanotechnology: Materials, Infrastructure, and Safety Wook Jun Nam
 E SC 412 Nanotechnology: Materials, Infrastructure, and Safety Wook Jun Nam Lecture 10 Outline 1. Wet Etching/Vapor Phase Etching 2. Dry Etching DC/RF Plasma Plasma Reactors Materials/Gases Etching Parameters
E SC 412 Nanotechnology: Materials, Infrastructure, and Safety Wook Jun Nam Lecture 10 Outline 1. Wet Etching/Vapor Phase Etching 2. Dry Etching DC/RF Plasma Plasma Reactors Materials/Gases Etching Parameters
EE C245 ME C218 Introduction to MEMS Design Fall 2012
 EE C245 ME C218 Introduction to MEMS Design Fall 2012 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture EE C245:
EE C245 ME C218 Introduction to MEMS Design Fall 2012 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture EE C245:
INF5490 RF MEMS. LN03: Modeling, design and analysis. Spring 2008, Oddvar Søråsen Department of Informatics, UoO
 INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
Transducers. Today: Electrostatic Capacitive. EEL5225: Principles of MEMS Transducers (Fall 2003) Instructor: Dr. Hui-Kai Xie
 Instructor: Dr. Hui-Kai Xie") EEL55: Principles of MEMS Transducers (Fall 3) Instructor: Dr. Hui-Kai Xie Last lecture Piezoresistive Pressure sensor Transducers Today: Electrostatic Capacitive Reading: Senturia, Chapter 6, pp. 15-138
EEL55: Principles of MEMS Transducers (Fall 3) Instructor: Dr. Hui-Kai Xie Last lecture Piezoresistive Pressure sensor Transducers Today: Electrostatic Capacitive Reading: Senturia, Chapter 6, pp. 15-138
EE 527 MICROFABRICATION. Lecture 25 Tai-Chang Chen University of Washington
 EE 527 MICROFABRICATION Lecture 25 Tai-Chang Chen University of Washington ION MILLING SYSTEM Kaufmann source Use e-beam to strike plasma A magnetic field applied to increase ion density Drawback Low etch
EE 527 MICROFABRICATION Lecture 25 Tai-Chang Chen University of Washington ION MILLING SYSTEM Kaufmann source Use e-beam to strike plasma A magnetic field applied to increase ion density Drawback Low etch
EE C245 - ME C218 Introduction to MEMS Design Fall Today s Lecture
 EE C45 - ME C18 Introduction to MEMS Design Fall 003 Roger Howe and Thara Srinivasan Lecture 11 Electrostatic Actuators II Today s Lecture Linear (vs. displacement) electrostatic actuation: vary overlap
EE C45 - ME C18 Introduction to MEMS Design Fall 003 Roger Howe and Thara Srinivasan Lecture 11 Electrostatic Actuators II Today s Lecture Linear (vs. displacement) electrostatic actuation: vary overlap
MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary
 MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
EE 527 MICROFABRICATION. Lecture 24 Tai-Chang Chen University of Washington
 EE 527 MICROFABRICATION Lecture 24 Tai-Chang Chen University of Washington EDP ETCHING OF SILICON - 1 Ethylene Diamine Pyrocatechol Anisotropy: (100):(111) ~ 35:1 EDP is very corrosive, very carcinogenic,
EE 527 MICROFABRICATION Lecture 24 Tai-Chang Chen University of Washington EDP ETCHING OF SILICON - 1 Ethylene Diamine Pyrocatechol Anisotropy: (100):(111) ~ 35:1 EDP is very corrosive, very carcinogenic,
SUPPLEMENTARY INFORMATION
 In the format provided by the authors and unedited. DOI: 10.1038/NPHOTON.2016.254 Measurement of non-monotonic Casimir forces between silicon nanostructures Supplementary information L. Tang 1, M. Wang
In the format provided by the authors and unedited. DOI: 10.1038/NPHOTON.2016.254 Measurement of non-monotonic Casimir forces between silicon nanostructures Supplementary information L. Tang 1, M. Wang
ETCHING Chapter 10. Mask. Photoresist
 ETCHING Chapter 10 Mask Light Deposited Substrate Photoresist Etch mask deposition Photoresist application Exposure Development Etching Resist removal Etching of thin films and sometimes the silicon substrate
ETCHING Chapter 10 Mask Light Deposited Substrate Photoresist Etch mask deposition Photoresist application Exposure Development Etching Resist removal Etching of thin films and sometimes the silicon substrate
Capacitive Sensor Interfaces
 Capacitive Sensor Interfaces Bernhard E. Boser Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley Capacitive Sensor Interfaces 1996
Capacitive Sensor Interfaces Bernhard E. Boser Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley Capacitive Sensor Interfaces 1996
Four Degrees-of-Freedom Micromachined Gyroscope
 Microsystems Laboratory Technical Report Four Degrees-of-Freedom Micromachined Gyroscope Cenk Acar 23 October 2001 Technical Report No: MSL-01003 cfl2001 Cenk Acar Contents Contents List of Figures Abstract
Microsystems Laboratory Technical Report Four Degrees-of-Freedom Micromachined Gyroscope Cenk Acar 23 October 2001 Technical Report No: MSL-01003 cfl2001 Cenk Acar Contents Contents List of Figures Abstract
EE 570: Location and Navigation
 EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
1. Narrative Overview Questions
 Homework 4 Due Nov. 16, 010 Required Reading: Text and Lecture Slides on Downloadable from Course WEB site: http://courses.washington.edu/overney/nme498.html 1. Narrative Overview Questions Question 1
Homework 4 Due Nov. 16, 010 Required Reading: Text and Lecture Slides on Downloadable from Course WEB site: http://courses.washington.edu/overney/nme498.html 1. Narrative Overview Questions Question 1
Tool- and pattern-dependent spatial variations in silicon deep reactive ion etching
 Tool- and pattern-dependent spatial variations in silicon deep reactive ion etching Hayden Taylor Microsystems Technology Laboratories Massachusetts Institute of Technology 12 May 2006 Coping with spatial
Tool- and pattern-dependent spatial variations in silicon deep reactive ion etching Hayden Taylor Microsystems Technology Laboratories Massachusetts Institute of Technology 12 May 2006 Coping with spatial
EE C245 ME C218 Introduction to MEMS Design Fall 2007
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 17: Energy
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 17: Energy
Etching: Basic Terminology
 Lecture 7 Etching Etching: Basic Terminology Introduction : Etching of thin films and sometimes the silicon substrate are very common process steps. Usually selectivity, and directionality are the first
Lecture 7 Etching Etching: Basic Terminology Introduction : Etching of thin films and sometimes the silicon substrate are very common process steps. Usually selectivity, and directionality are the first
Foundations of MEMS. Chang Liu. McCormick School of Engineering and Applied Science Northwestern University. International Edition Contributions by
 Foundations of MEMS Second Edition Chang Liu McCormick School of Engineering and Applied Science Northwestern University International Edition Contributions by Vaishali B. Mungurwadi B. V. Bhoomaraddi
Foundations of MEMS Second Edition Chang Liu McCormick School of Engineering and Applied Science Northwestern University International Edition Contributions by Vaishali B. Mungurwadi B. V. Bhoomaraddi
Lecture 6 Plasmas. Chapters 10 &16 Wolf and Tauber. ECE611 / CHE611 Electronic Materials Processing Fall John Labram 1/68
 Lecture 6 Plasmas Chapters 10 &16 Wolf and Tauber 1/68 Announcements Homework: Homework will be returned to you on Thursday (12 th October). Solutions will be also posted online on Thursday (12 th October)
Lecture 6 Plasmas Chapters 10 &16 Wolf and Tauber 1/68 Announcements Homework: Homework will be returned to you on Thursday (12 th October). Solutions will be also posted online on Thursday (12 th October)
EE C245 ME C218 Introduction to MEMS Design
 EE C45 ME C8 Introduction to MEMS Deign Fall 007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Science Univerity of California at Berkeley Berkeley, CA 9470 Lecture 5: Output t Sening
EE C45 ME C8 Introduction to MEMS Deign Fall 007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Science Univerity of California at Berkeley Berkeley, CA 9470 Lecture 5: Output t Sening
Supplementary Methods A. Sample fabrication
 Supplementary Methods A. Sample fabrication Supplementary Figure 1(a) shows the SEM photograph of a typical sample, with three suspended graphene resonators in an array. The cross-section schematic is
Supplementary Methods A. Sample fabrication Supplementary Figure 1(a) shows the SEM photograph of a typical sample, with three suspended graphene resonators in an array. The cross-section schematic is
Design and characterization of in-plane MEMS yaw rate sensor
 Sādhanā Vol. 34, Part 4, August 2009, pp. 633 642. Printed in India Design and characterization of in-plane MEMS yaw rate sensor K P VENKATESH, NISHAD PATIL, ASHOK KUMAR PANDEY and RUDRA PRATAP CranesSci
Sādhanā Vol. 34, Part 4, August 2009, pp. 633 642. Printed in India Design and characterization of in-plane MEMS yaw rate sensor K P VENKATESH, NISHAD PATIL, ASHOK KUMAR PANDEY and RUDRA PRATAP CranesSci
Objectives. Fundamentals of Dynamics: Module 9 : Robot Dynamics & controls. Lecture 31 : Robot dynamics equation (LE & NE methods) and examples
 and examples") \ Module 9 : Robot Dynamics & controls Lecture 31 : Robot dynamics equation (LE & NE methods) and examples Objectives In this course you will learn the following Fundamentals of Dynamics Coriolis component
\ Module 9 : Robot Dynamics & controls Lecture 31 : Robot dynamics equation (LE & NE methods) and examples Objectives In this course you will learn the following Fundamentals of Dynamics Coriolis component
EE C245 ME C218 Introduction to MEMS Design Fall 2007
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 13: Material
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 13: Material
Fundamentals of ANALOG TO DIGITAL CONVERTERS: Part I.3. Technology
 Fundamentals of ANALOG TO DIGITAL CONVERTERS: Part I.3 Technology January 019 Texas A&M University 1 Spring, 019 Well-Diffusion Resistor Example shows two long resistors for K range Alternatively, serpentine
Fundamentals of ANALOG TO DIGITAL CONVERTERS: Part I.3 Technology January 019 Texas A&M University 1 Spring, 019 Well-Diffusion Resistor Example shows two long resistors for K range Alternatively, serpentine
EE C245 ME C218 Introduction to MEMS Design Fall 2010
 EE C245 ME C218 Introduction to MEMS Design Fall 2010 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture EE C245:
EE C245 ME C218 Introduction to MEMS Design Fall 2010 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture EE C245:
A Pendulous Oscillating Gyroscopic Accelerometer Fabricated Using Deep-Reactive Ion Etching
 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 12, NO. 1, FEBRUARY 2003 21 A Pendulous Oscillating Gyroscopic Accelerometer Fabricated Using Deep-Reactive Ion Etching Todd J. Kaiser, Member, IEEE, and
JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 12, NO. 1, FEBRUARY 2003 21 A Pendulous Oscillating Gyroscopic Accelerometer Fabricated Using Deep-Reactive Ion Etching Todd J. Kaiser, Member, IEEE, and
UNIT 3. By: Ajay Kumar Gautam Asst. Prof. Dev Bhoomi Institute of Technology & Engineering, Dehradun
 UNIT 3 By: Ajay Kumar Gautam Asst. Prof. Dev Bhoomi Institute of Technology & Engineering, Dehradun 1 Syllabus Lithography: photolithography and pattern transfer, Optical and non optical lithography, electron,
UNIT 3 By: Ajay Kumar Gautam Asst. Prof. Dev Bhoomi Institute of Technology & Engineering, Dehradun 1 Syllabus Lithography: photolithography and pattern transfer, Optical and non optical lithography, electron,
Integrating MEMS Electro-Static Driven Micro-Probe and Laser Doppler Vibrometer for Non-Contact Vibration Mode SPM System Design
 Tamkang Journal of Science and Engineering, Vol. 12, No. 4, pp. 399 407 (2009) 399 Integrating MEMS Electro-Static Driven Micro-Probe and Laser Doppler Vibrometer for Non-Contact Vibration Mode SPM System
Tamkang Journal of Science and Engineering, Vol. 12, No. 4, pp. 399 407 (2009) 399 Integrating MEMS Electro-Static Driven Micro-Probe and Laser Doppler Vibrometer for Non-Contact Vibration Mode SPM System
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 ecture 15: Beam
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 ecture 15: Beam
Transduction Based on Changes in the Energy Stored in an Electrical Field
 Lecture 6- Transduction Based on Changes in the Energy Stored in an Electrical Field Actuator Examples Microgrippers Normal force driving In-plane force driving» Comb-drive device F = εav d 1 ε oε F rwv
Lecture 6- Transduction Based on Changes in the Energy Stored in an Electrical Field Actuator Examples Microgrippers Normal force driving In-plane force driving» Comb-drive device F = εav d 1 ε oε F rwv
Reactive Ion Etching (RIE)
") Reactive Ion Etching (RIE) RF 13.56 ~ MHz plasma Parallel-Plate Reactor wafers Sputtering Plasma generates (1) Ions (2) Activated neutrals Enhance chemical reaction 1 2 Remote Plasma Reactors Plasma Sources
Reactive Ion Etching (RIE) RF 13.56 ~ MHz plasma Parallel-Plate Reactor wafers Sputtering Plasma generates (1) Ions (2) Activated neutrals Enhance chemical reaction 1 2 Remote Plasma Reactors Plasma Sources
Transduction Based on Changes in the Energy Stored in an Electrical Field
 Lecture 6-1 Transduction Based on Changes in the Energy Stored in an Electrical Field Electric Field and Forces Suppose a charged fixed q 1 in a space, an exploring charge q is moving toward the fixed
Lecture 6-1 Transduction Based on Changes in the Energy Stored in an Electrical Field Electric Field and Forces Suppose a charged fixed q 1 in a space, an exploring charge q is moving toward the fixed
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 16: Energy
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 16: Energy
EE C245 ME C218 Introduction to MEMS Design Fall 2007
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 15: Beam
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 15: Beam
Design and Simulation of Comb Drive Capacitive Accelerometer by Using MEMS Intellisuite Design Tool
 Design and Simulation of Comb Drive Capacitive Accelerometer by Using MEMS Intellisuite Design Tool Gireesh K C 1, Harisha M 2, Karthick Raj M 3, Karthikkumar M 4, Thenmoli M 5 UG Students, Department
Design and Simulation of Comb Drive Capacitive Accelerometer by Using MEMS Intellisuite Design Tool Gireesh K C 1, Harisha M 2, Karthick Raj M 3, Karthikkumar M 4, Thenmoli M 5 UG Students, Department
A new cantilever beam-rigid-body MEMS gyroscope: mathematical model and linear dynamics
 Proceedings of the International Conference on Mechanical Engineering and Mechatronics Toronto, Ontario, Canada, August 8-10 2013 Paper No. XXX (The number assigned by the OpenConf System) A new cantilever
Proceedings of the International Conference on Mechanical Engineering and Mechatronics Toronto, Ontario, Canada, August 8-10 2013 Paper No. XXX (The number assigned by the OpenConf System) A new cantilever
EE C247B / ME C218 INTRODUCTION TO MEMS DESIGN SPRING 2014 C. Nguyen PROBLEM SET #4
 Issued: Wednesday, Mar. 5, 2014 PROBLEM SET #4 Due (at 9 a.m.): Tuesday Mar. 18, 2014, in the EE C247B HW box near 125 Cory. 1. Suppose you would like to fabricate the suspended cross beam structure below
Issued: Wednesday, Mar. 5, 2014 PROBLEM SET #4 Due (at 9 a.m.): Tuesday Mar. 18, 2014, in the EE C247B HW box near 125 Cory. 1. Suppose you would like to fabricate the suspended cross beam structure below
EE C245 - ME C218 Introduction to MEMS Design Fall Today s Lecture
 EE C45 ME C18 Introduction to MEMS Desin all 3 Roer Howe and Thara Srinivasan Lecture 1 Electrostatic Actuators I Today s Lecture Enery in electromechanical systems define carefully Parallelplate electrostatic
EE C45 ME C18 Introduction to MEMS Desin all 3 Roer Howe and Thara Srinivasan Lecture 1 Electrostatic Actuators I Today s Lecture Enery in electromechanical systems define carefully Parallelplate electrostatic
 Citation Bram Lips, Robert Puers, (2016), Three step deep reactive ion etch for high density trench etching Journal of Physics: Conference Series, 757, 012005. Archived version Author manuscript: the content
Citation Bram Lips, Robert Puers, (2016), Three step deep reactive ion etch for high density trench etching Journal of Physics: Conference Series, 757, 012005. Archived version Author manuscript: the content
E05 Resonator Design
 POLITECNICO DI MILANO MSC COURSE - MEMS AND MICROSENSORS - 2018/2019 E05 Resonator Design Giorgio Mussi 16/10/2018 In this class we will learn how an in-plane MEMS resonator handles process variabilities,
POLITECNICO DI MILANO MSC COURSE - MEMS AND MICROSENSORS - 2018/2019 E05 Resonator Design Giorgio Mussi 16/10/2018 In this class we will learn how an in-plane MEMS resonator handles process variabilities,
EE C245 ME C218 Introduction to MEMS Design Fall 2010
 Lecture Outline EE C245 ME C28 Introduction to MEMS Design Fall 200 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720
Lecture Outline EE C245 ME C28 Introduction to MEMS Design Fall 200 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720
MEMS TUNABLE CAPACITORS WITH FRAGMENTED ELECTRODES AND ROTATIONAL ELECTRO-THERMAL DRIVE
 MEMS TUNABLE CAPACITORS WITH FRAGMENTED ELECTRODES AND ROTATIONAL A. Mehdaoui, M. Pisani, D. Tsamados, F. Casset, P. Ancey, A.M. Ionescu To cite this version: A. Mehdaoui, M. Pisani, D. Tsamados, F. Casset,
MEMS TUNABLE CAPACITORS WITH FRAGMENTED ELECTRODES AND ROTATIONAL A. Mehdaoui, M. Pisani, D. Tsamados, F. Casset, P. Ancey, A.M. Ionescu To cite this version: A. Mehdaoui, M. Pisani, D. Tsamados, F. Casset,
Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy
 Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy Micromechanics Ass.Prof. Priv.-Doz. DI Dr. Harald Plank a,b a Institute of Electron Microscopy and Nanoanalysis, Graz
Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy Micromechanics Ass.Prof. Priv.-Doz. DI Dr. Harald Plank a,b a Institute of Electron Microscopy and Nanoanalysis, Graz
UNIVERSITY OF CALIFORNIA College of Engineering Department of Electrical Engineering and Computer Sciences. Fall Exam 1
 UNIVERSITY OF CALIFORNIA College of Engineering Department of Electrical Engineering and Computer Sciences EECS 143 Fall 2008 Exam 1 Professor Ali Javey Answer Key Name: SID: 1337 Closed book. One sheet
UNIVERSITY OF CALIFORNIA College of Engineering Department of Electrical Engineering and Computer Sciences EECS 143 Fall 2008 Exam 1 Professor Ali Javey Answer Key Name: SID: 1337 Closed book. One sheet
CHARACTERIZATION OF DEEP REACTIVE ION ETCHING (DRIE) PROCESS FOR ELECTRICAL THROUGH-WAFER INTERCONNECTS FOR PIEZORESISTIVE INERTIAL SENSORS
 PROCESS FOR ELECTRICAL THROUGH-WAFER INTERCONNECTS FOR PIEZORESISTIVE INERTIAL SENSORS") CHARACTERIZATION OF DEEP REACTIVE ION ETCHING (DRIE) PROCESS FOR ELECTRICAL THROUGH-WAFER INTERCONNECTS FOR PIEZORESISTIVE INERTIAL SENSORS Maria Suggs, Physics Major, Southern Polytechnic State University
CHARACTERIZATION OF DEEP REACTIVE ION ETCHING (DRIE) PROCESS FOR ELECTRICAL THROUGH-WAFER INTERCONNECTS FOR PIEZORESISTIVE INERTIAL SENSORS Maria Suggs, Physics Major, Southern Polytechnic State University
Micro Capacitive Tilt Sensor for Human Body Movement Detection
 Micro Capacitive Tilt Sensor for Human Body Movement Detection L. Zhao, E. M. Yeatman Optical and Semiconductor Devices Group, Department of Electrical & Electronic Engineering Imperial College London,
Micro Capacitive Tilt Sensor for Human Body Movement Detection L. Zhao, E. M. Yeatman Optical and Semiconductor Devices Group, Department of Electrical & Electronic Engineering Imperial College London,
DESIGN AND ANALYSIS OF ROTATION RATE SENSOR. Modeling of vibratory MEMs Gyroscope
 DESIGN AND ANALYSIS OF ROTATION RATE SENSOR Modeling of vibratory MEMs Gyroscope 1 Priya.P.Shreshtha & 2 Sushas S.Mohite 1 Mechanical Department, Rajaram Bapu institute of Technology Islampur, Dist. Sangli,
DESIGN AND ANALYSIS OF ROTATION RATE SENSOR Modeling of vibratory MEMs Gyroscope 1 Priya.P.Shreshtha & 2 Sushas S.Mohite 1 Mechanical Department, Rajaram Bapu institute of Technology Islampur, Dist. Sangli,
4FNJDPOEVDUPS 'BCSJDBUJPO &UDI
 2010.5.4 1 Major Fabrication Steps in CMOS Process Flow UV light oxygen Silicon dioxide Silicon substrate Oxidation (Field oxide) photoresist Photoresist Coating Mask exposed photoresist Mask-Wafer Exposed
2010.5.4 1 Major Fabrication Steps in CMOS Process Flow UV light oxygen Silicon dioxide Silicon substrate Oxidation (Field oxide) photoresist Photoresist Coating Mask exposed photoresist Mask-Wafer Exposed
NIST ELECTROSTATIC FORCE BALANCE EXPERIMENT
 NIST ELECTROSTATIC FORCE BALANCE EXPERIMENT John A. Kramar, David B. Newell, and Jon R. Pratt National Institute of Standards and Technology, Gaithersburg, MD, USA We have designed and built a prototype
NIST ELECTROSTATIC FORCE BALANCE EXPERIMENT John A. Kramar, David B. Newell, and Jon R. Pratt National Institute of Standards and Technology, Gaithersburg, MD, USA We have designed and built a prototype
SENSORS and TRANSDUCERS
 SENSORS and TRANSDUCERS Tadeusz Stepinski, Signaler och system The Mechanical Energy Domain Physics Surface acoustic waves Silicon microresonators Variable resistance sensors Piezoelectric sensors Capacitive
SENSORS and TRANSDUCERS Tadeusz Stepinski, Signaler och system The Mechanical Energy Domain Physics Surface acoustic waves Silicon microresonators Variable resistance sensors Piezoelectric sensors Capacitive
where C f = A ρ g fluid capacitor But when squeezed, h (and hence P) may vary with time even though V does not. Seems to imply C f = C f (t)
 may vary with time even though V does not. Seems to imply C f = C f (t)") ENERGY-STORING COUPLING BETWEEN DOMAINS MULTI-PORT ENERGY STORAGE ELEMENTS Context: examine limitations of some basic model elements. EXAMPLE: open fluid container with deformable walls P = ρ g h h = A
ENERGY-STORING COUPLING BETWEEN DOMAINS MULTI-PORT ENERGY STORAGE ELEMENTS Context: examine limitations of some basic model elements. EXAMPLE: open fluid container with deformable walls P = ρ g h h = A
Arrow Brasil. Rodrigo Rodrigues Field Application Engineer F: Date: 30/01/2014 TM 2
 TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
SURFACE TENSION POWERED SELF-ASSEMBLY OF 3D MOEMS DEVICES USING DRIE OF BONDED SILICON-ON-INSULATOR WAFERS INTRODUCTION
 SURFACE TENSION POWERED SELF-ASSEMBLY OF 3D MOEMS DEVICES USING DRIE OF BONDED SILICON-ON-INSULATOR WAFERS R.R.A Syms, C. Gormley and S. Blackstone Dept. of Electrical and Electronic Engineering, Imperial
SURFACE TENSION POWERED SELF-ASSEMBLY OF 3D MOEMS DEVICES USING DRIE OF BONDED SILICON-ON-INSULATOR WAFERS R.R.A Syms, C. Gormley and S. Blackstone Dept. of Electrical and Electronic Engineering, Imperial
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 12: Mechanical
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 12: Mechanical
EE C247B / ME C218 INTRODUCTION TO MEMS DESIGN SPRING 2016 C. NGUYEN PROBLEM SET #4
 Issued: Wednesday, March 4, 2016 PROBLEM SET #4 Due: Monday, March 14, 2016, 8:00 a.m. in the EE C247B homework box near 125 Cory. 1. This problem considers bending of a simple cantilever and several methods
Issued: Wednesday, March 4, 2016 PROBLEM SET #4 Due: Monday, March 14, 2016, 8:00 a.m. in the EE C247B homework box near 125 Cory. 1. This problem considers bending of a simple cantilever and several methods
Electrostatic Microgenerators
 Electrostatic Microgenerators P.D. Mitcheson, T. Sterken, C. He, M. Kiziroglou, E. M. Yeatman and R. Puers Executive Summary Just as the electromagnetic force can be used to generate electrical power,
Electrostatic Microgenerators P.D. Mitcheson, T. Sterken, C. He, M. Kiziroglou, E. M. Yeatman and R. Puers Executive Summary Just as the electromagnetic force can be used to generate electrical power,
Section 12: Intro to Devices
 Section 12: Intro to Devices Extensive reading materials on reserve, including Robert F. Pierret, Semiconductor Device Fundamentals EE143 Ali Javey Bond Model of Electrons and Holes Si Si Si Si Si Si Si
Section 12: Intro to Devices Extensive reading materials on reserve, including Robert F. Pierret, Semiconductor Device Fundamentals EE143 Ali Javey Bond Model of Electrons and Holes Si Si Si Si Si Si Si
The Pull-In of Symmetrically and Asymmetrically Driven Microstructures and the Use in DC Voltage References
 IEEE Instrumentation and Measurement Technology Conference Anchorage, AK, USA, 1-3 May 00 The Pull-In of Symmetrically and Asymmetrically Driven Microstructures and the Use in DC Voltage References L.A.
IEEE Instrumentation and Measurement Technology Conference Anchorage, AK, USA, 1-3 May 00 The Pull-In of Symmetrically and Asymmetrically Driven Microstructures and the Use in DC Voltage References L.A.
sensors ISSN
 Sensors 008, 8, 3706-378; DOI: 0.3390/s8063706 Article OPEN ACCESS sensors ISSN 44-80 www.mdpi.org/sensors Dynamic Characteristics of Vertically Coupled Structures and the Design of a Decoupled Micro Gyroscope
Sensors 008, 8, 3706-378; DOI: 0.3390/s8063706 Article OPEN ACCESS sensors ISSN 44-80 www.mdpi.org/sensors Dynamic Characteristics of Vertically Coupled Structures and the Design of a Decoupled Micro Gyroscope
Transactions on the Built Environment vol 12, 1995 WIT Press, ISSN
 Transactions on the Built Environment vol 12, 1995 WIT Press, www.witpress.com, ISSN 1743-359 Design and analysis of a resonant gyroscope suitable for fabrication using the LIGA process L. Yao, E. Chowanietz,
Transactions on the Built Environment vol 12, 1995 WIT Press, www.witpress.com, ISSN 1743-359 Design and analysis of a resonant gyroscope suitable for fabrication using the LIGA process L. Yao, E. Chowanietz,
Chapter 7 Plasma Basic
 Chapter 7 Plasma Basic Hong Xiao, Ph. D. hxiao89@hotmail.com www2.austin.cc.tx.us/hongxiao/book.htm Hong Xiao, Ph. D. www2.austin.cc.tx.us/hongxiao/book.htm 1 Objectives List at least three IC processes
Chapter 7 Plasma Basic Hong Xiao, Ph. D. hxiao89@hotmail.com www2.austin.cc.tx.us/hongxiao/book.htm Hong Xiao, Ph. D. www2.austin.cc.tx.us/hongxiao/book.htm 1 Objectives List at least three IC processes
UHF-ECR Plasma Etching System for Dielectric Films of Next-generation Semiconductor Devices
 UHF-ECR Plasma Etching System for Dielectric Films of Next-generation Semiconductor Devices 1 UHF-ECR Plasma Etching System for Dielectric Films of Next-generation Semiconductor Devices Katsuya Watanabe
UHF-ECR Plasma Etching System for Dielectric Films of Next-generation Semiconductor Devices 1 UHF-ECR Plasma Etching System for Dielectric Films of Next-generation Semiconductor Devices Katsuya Watanabe
Section 12: Intro to Devices
 Section 12: Intro to Devices Extensive reading materials on reserve, including Robert F. Pierret, Semiconductor Device Fundamentals Bond Model of Electrons and Holes Si Si Si Si Si Si Si Si Si Silicon
Section 12: Intro to Devices Extensive reading materials on reserve, including Robert F. Pierret, Semiconductor Device Fundamentals Bond Model of Electrons and Holes Si Si Si Si Si Si Si Si Si Silicon
Lecture 23: Negative Resistance Osc, Differential Osc, and VCOs
 EECS 142 Lecture 23: Negative Resistance Osc, Differential Osc, and VCOs Prof. Ali M. Niknejad University of California, Berkeley Copyright c 2005 by Ali M. Niknejad A. M. Niknejad University of California,
EECS 142 Lecture 23: Negative Resistance Osc, Differential Osc, and VCOs Prof. Ali M. Niknejad University of California, Berkeley Copyright c 2005 by Ali M. Niknejad A. M. Niknejad University of California,
CBSE PHYSICS QUESTION PAPER (2005)
") CBSE PHYSICS QUESTION PAPER (2005) (i) (ii) All questions are compulsory. There are 30 questions in total. Questions 1 to 8 carry one mark each, Questions 9 to 18 carry two marks each, Question 19 to 27
CBSE PHYSICS QUESTION PAPER (2005) (i) (ii) All questions are compulsory. There are 30 questions in total. Questions 1 to 8 carry one mark each, Questions 9 to 18 carry two marks each, Question 19 to 27
Comb Resonator Design (1)
") Lecture 5: Comb Resonator Design (1) Sh School of felectrical ti lengineering i and dcomputer Science, Si Seoul National University Nano/Micro Systems & Controls Laboratory Email: dicho@snu.ac.kr URL:
Lecture 5: Comb Resonator Design (1) Sh School of felectrical ti lengineering i and dcomputer Science, Si Seoul National University Nano/Micro Systems & Controls Laboratory Email: dicho@snu.ac.kr URL:
20 MHz Free-Free Beam Microelectromechanical Filter with High Quality Factor
 20 MHz Free-Free Beam Microelectromechanical Filter with High Quality Factor Group 4 Yang Lu 1, Tianfeng Lu 1, Han Wang 2, Zichen Tang 2 1 Department of Material Science and Engineering 2 Department of
20 MHz Free-Free Beam Microelectromechanical Filter with High Quality Factor Group 4 Yang Lu 1, Tianfeng Lu 1, Han Wang 2, Zichen Tang 2 1 Department of Material Science and Engineering 2 Department of
EE 247B/ME 218: Introduction to MEMS Design Lecture 26m1: Noise & MDS CTN 4/25/17. Copyright 2017 Regents of the University of California
 EE 47B/ME 18: Introduction to MEMS Design Lecture 6m1: & MDS CTN 4/5/17 Thermal Sources Thermal in Electronics: (Johnson noise, Nyquist noise) Produced as a result of the thermally excited random motion
EE 47B/ME 18: Introduction to MEMS Design Lecture 6m1: & MDS CTN 4/5/17 Thermal Sources Thermal in Electronics: (Johnson noise, Nyquist noise) Produced as a result of the thermally excited random motion
MEMS INERTIAL POWER GENERATORS FOR BIOMEDICAL APPLICATIONS
 MEMS INERTIAL POWER GENERATORS FOR BIOMEDICAL APPLICATIONS P. MIAO, P. D. MITCHESON, A. S. HOLMES, E. M. YEATMAN, T. C. GREEN AND B. H. STARK Department of Electrical and Electronic Engineering, Imperial
MEMS INERTIAL POWER GENERATORS FOR BIOMEDICAL APPLICATIONS P. MIAO, P. D. MITCHESON, A. S. HOLMES, E. M. YEATMAN, T. C. GREEN AND B. H. STARK Department of Electrical and Electronic Engineering, Imperial
AP Physics C Mechanics Objectives
 AP Physics C Mechanics Objectives I. KINEMATICS A. Motion in One Dimension 1. The relationships among position, velocity and acceleration a. Given a graph of position vs. time, identify or sketch a graph
AP Physics C Mechanics Objectives I. KINEMATICS A. Motion in One Dimension 1. The relationships among position, velocity and acceleration a. Given a graph of position vs. time, identify or sketch a graph
ENERGY HARVESTING TRANSDUCERS - ELECTROSTATIC (ICT-ENERGY SUMMER SCHOOL 2016)
") ENERGY HARVESTING TRANSDUCERS - ELECTROSTATIC (ICT-ENERGY SUMMER SCHOOL 2016) Shad Roundy, PhD Department of Mechanical Engineering University of Utah shad.roundy@utah.edu Three Types of Electromechanical
ENERGY HARVESTING TRANSDUCERS - ELECTROSTATIC (ICT-ENERGY SUMMER SCHOOL 2016) Shad Roundy, PhD Department of Mechanical Engineering University of Utah shad.roundy@utah.edu Three Types of Electromechanical
Slide 1. Temperatures Light (Optoelectronics) Magnetic Fields Strain Pressure Displacement and Rotation Acceleration Electronic Sensors
 Magnetic Fields Strain Pressure Displacement and Rotation Acceleration Electronic Sensors") Slide 1 Electronic Sensors Electronic sensors can be designed to detect a variety of quantitative aspects of a given physical system. Such quantities include: Temperatures Light (Optoelectronics) Magnetic
Slide 1 Electronic Sensors Electronic sensors can be designed to detect a variety of quantitative aspects of a given physical system. Such quantities include: Temperatures Light (Optoelectronics) Magnetic
Chapter 3 Engineering Science for Microsystems Design and Fabrication
 Lectures on MEMS and MICROSYSTEMS DESIGN and MANUFACTURE Chapter 3 Engineering Science for Microsystems Design and Fabrication In this Chapter, we will present overviews of the principles of physical and
Lectures on MEMS and MICROSYSTEMS DESIGN and MANUFACTURE Chapter 3 Engineering Science for Microsystems Design and Fabrication In this Chapter, we will present overviews of the principles of physical and
Optimizing micromechanical force detectors for measuring. magnetization at high magnetic fields
 Abstract Optimizing micromechanical force detectors for measuring magnetization at high magnetic fields Jeremy Paster University of Florida July 30, 2008 MEMS devices prove to be advantageous in magnetometry.
Abstract Optimizing micromechanical force detectors for measuring magnetization at high magnetic fields Jeremy Paster University of Florida July 30, 2008 MEMS devices prove to be advantageous in magnetometry.
Simple piezoresistive accelerometer
 Simple piezoresistive pressure sensor Simple piezoresistive accelerometer Simple capacitive accelerometer Cap wafer C(x)=C(x(a)) Cap wafer may be micromachined silicon, pyrex, Serves as over-range protection,
Simple piezoresistive pressure sensor Simple piezoresistive accelerometer Simple capacitive accelerometer Cap wafer C(x)=C(x(a)) Cap wafer may be micromachined silicon, pyrex, Serves as over-range protection,
Midterm 2 PROBLEM POINTS MAX
 Midterm 2 PROBLEM POINTS MAX 1 30 2 24 3 15 4 45 5 36 1 Personally, I liked the University; they gave us money and facilities, we didn't have to produce anything. You've never been out of college. You
Midterm 2 PROBLEM POINTS MAX 1 30 2 24 3 15 4 45 5 36 1 Personally, I liked the University; they gave us money and facilities, we didn't have to produce anything. You've never been out of college. You
b. The displacement of the mass due to a constant acceleration a is x=
 EE147/247A Final, Fall 2013 Page 1 /35 2 /55 NO CALCULATORS, CELL PHONES, or other electronics allowed. Show your work, and put final answers in the boxes provided. Use proper units in all answers. 1.
EE147/247A Final, Fall 2013 Page 1 /35 2 /55 NO CALCULATORS, CELL PHONES, or other electronics allowed. Show your work, and put final answers in the boxes provided. Use proper units in all answers. 1.
PY5020: Nanomechanics Nanoscience MEMS and NEMS
 PY5020: Nanomechanics Nanoscience MEMS and NEMS Toby Hallam hallamt@tcd.ie Overview - MEMS (Micro-Electro-Mechanical Systems) - Some enabling technologies RIE CPD - Capacitive actuators Pull-in instability
PY5020: Nanomechanics Nanoscience MEMS and NEMS Toby Hallam hallamt@tcd.ie Overview - MEMS (Micro-Electro-Mechanical Systems) - Some enabling technologies RIE CPD - Capacitive actuators Pull-in instability
Microfabrication for MEMS: Part I
 Microfabrication for MEMS: Part I Carol Livermore Massachusetts Institute of Technology * With thanks to Steve Senturia, from whose lecture notes some of these materials are adapted. CL: 6.777J/2.372J
Microfabrication for MEMS: Part I Carol Livermore Massachusetts Institute of Technology * With thanks to Steve Senturia, from whose lecture notes some of these materials are adapted. CL: 6.777J/2.372J
Contactless Excitation of MEMS Resonant Sensors by Electromagnetic Driving
 Presented at the COMSOL Conference 2009 Milan University of Brescia Department of Electronics for Automation Contactless Excitation of MEMS Resonant Sensors by Electromagnetic Driving Marco Baù, VF V.
Presented at the COMSOL Conference 2009 Milan University of Brescia Department of Electronics for Automation Contactless Excitation of MEMS Resonant Sensors by Electromagnetic Driving Marco Baù, VF V.
Dept. of Electrical & Computer Engineering, Dept. of Mechanical Engineering University of Bridgeport, Bridgeport, CT /08/2015
 Design and Analysis of Three DOF Piezoelectric Vibration Energy Harvester Ravi Teja Purra Reddy, Xingguo Xiong, Junling Hu Dept. of Electrical & Computer Engineering, Dept. of Mechanical Engineering University
Design and Analysis of Three DOF Piezoelectric Vibration Energy Harvester Ravi Teja Purra Reddy, Xingguo Xiong, Junling Hu Dept. of Electrical & Computer Engineering, Dept. of Mechanical Engineering University
Ion Implantation. alternative to diffusion for the introduction of dopants essentially a physical process, rather than chemical advantages:
 Ion Implantation alternative to diffusion for the introduction of dopants essentially a physical process, rather than chemical advantages: mass separation allows wide varies of dopants dose control: diffusion
Ion Implantation alternative to diffusion for the introduction of dopants essentially a physical process, rather than chemical advantages: mass separation allows wide varies of dopants dose control: diffusion
CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS
 61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and
61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and