Arrow Brasil. Rodrigo Rodrigues Field Application Engineer F: Date: 30/01/2014 TM 2
|
|
|
- Emory Craig
- 5 years ago
- Views:
Transcription
1 TM
2 Arrow Brasil Rodrigo Rodrigues Field Application Engineer F: Date: 30/01/2014 TM 2

3 State-of-the-art review Introduction How a Gyro Works Performance and Applications Fusion with Other Sensors FXAS2100 Enablement Conclusions and Questions TM 3
4 TM
5 3 DOF: A single particle movement in just the three dimensions;no rotation 3-axis accelerometer 6 DOF: Motion of a rigid body in three-dimensional space, namely the ability to move forward/backward, up/down, left/right combined with rotation about three perpendicular axes. Movement along each of the three axes is independent of each other and independent of the rotation about any of these axes 3-axis accelerometer plus 3-axis magnetometer OR 3-axis accelerometer plus 3-axis gyroscope TM 5
6 9 DOF: Incorporation of motion sensors for relative linear and rotational acceleration and a magnetometer for absolute direction 3-axis accelerometer plus 3-axis magnetometer plus 3-axis gyroscope 10 DOF: 3-axis accelerometer plus 3-axis magnetometer plus 3-axis gyroscope plus either a pressure or temperature sensor Dead Reckoning The process of estimating one's current position based upon a previously determined position and advancing that position based upon known or estimated speeds over elapsed time, and course A disadvantage of dead reckoning is that since new positions are calculated solely from previous positions, the errors of the process are cumulative, so the error in the position fix grows with time TM 6
7 TM
 Measured in m/s 2")

8 An accelerometer sense straight line motion (linear motion) Measured in m/s 2 or g A Gyro senses rotation angular rate Measured in deg/s Earth rotation: o /s TM 8


9 Input angular rate ( ) Coriolis Force A fictional force on a moving object when observed on a rotating frame. The Coriolis force scales with the angular velocity of the frame. Angular rate ( ), drive motion (V d ) and Coriolis force (Fc) are always located on there axes orthogonal to each other. Fc 2 m Vr Drive Motion Coriolis Force This is where the confusion might begin. We called XY gyro with the sensing direction is in Z- axis while Z gyro with sensing direction in XY direction. Coriolis Force Input Rotation Drive Velocity Y (V d ) F 2 m c V d TM Z ( ) 9 X (Fc) Coriolis force causes spiral motion in Hurricanes

10 Three types of Gyros: Spinning Mass (Gimbal) -tilting produces precession Impractical in MEMS Optical measure time differences in laser paths Very expensive, but also the best performance Vibrating based on Coriolis effect The most common TM 10
 Sensitive to angular rotation in the z-axis Induced Coriolis acceleration (y- axis)")
11 Four main components: Proof mass Elastic springs Drive (actuation) system Sensing method Proof mass is put into oscillation (x-axis) Sensitive to angular rotation in the z-axis Induced Coriolis acceleration (y- axis) TM 11

 - Close looped and positive feedback")
 often used - Travel amplitude is magnified by Q-factor (4000 20,000) times at")
12 DAU Drive actuation unit, DMU Drive measurement unit Goal is to maintain an oscillation with large and constant amplitude to provide enough Coriolis force for sensing the angular rate Comb drive is natural choice for DAU and DMU - Capable of large travel range with linear force A high Q system is preferred (vacuum package) - Close looped and positive feedback system with amplitude control (AGC) to enable oscillation - Two port differential drive (push/pull) often used - Travel amplitude is magnified by Q-factor ( ,000) times at resonance TM 12


13 SMU sense measurement unit, FFU force feedback unit Goal is to convert Coriolis force into sense displacement, into a different capacitance change - Sense displacement is also an oscillatory motion! - Coriolis force will mix (amplitude-modulate) the angular rate (low frequency) with drive velocity (high frequency carrier) - Demodulation is require to extract the angular rate information from Capacitive sensing similar to accelerometer in terms of MEMS structure - Gap closing parallel plate electrodes TM 13

14 TM
15 Governed by noise Drifting over time/temperature TM 15
16 Operating range (Full scale range) Bias (Zero rate output ZRO) or Offset Angle Random Walk (white noise) Bias Instability ( o /hr) (1/f, flicker noise) Rate Random Walk (1/f 2 noise) TCO Scale factor (sensitivity) Accuracy (trim error, scale factor stability) Linearity Cross-axis TCS Noise, resolution Turn on time Linear/angular vibration/acoustic sensitivity Shock resistance (1/g, 1/gxg) TM 16
17 TM 17
18 TM 18
19 TM 19



20 Segway Scooter Uses five MEMS gyroscopes for tilt and rotation detection. TM 20
21 TM 21
22 TM

.")




23 Accelerometer + Magnetometer Fused Data Accelerometer plus magnetometer can provide device orientation and magnetic heading. A magnetometer can also be used as a virtual gyro in certain situations (magnetically clean and stable environment). Major weakness of this sensor pair is its sensitivity to linear acceleration, which leads to errors in both orientation and heading. Accelerometer + Gyroscopes Fused Data Accelerometer can help stabilize the drift in the gyroscope output data Rotation and linear acceleration can be separated Major weakness of this pair is the lack of an absolute heading reference Accelerometer + Gyroscope + Magnetometer Fused Data This combination of sensors can overcome the inherent limitations of each of the previous sensor pairings as their error sources (deficiencies) complement each other. Accelerometer + Gyroscope + Magnetometer + Pressure Fused Data This combination of sensors further improves on the previous pair with the addition of elevation. This is essential for use within buildings to sense the floor you are on. The pressure sensor can also be used to enable weather prediction. TM 23
24 TM



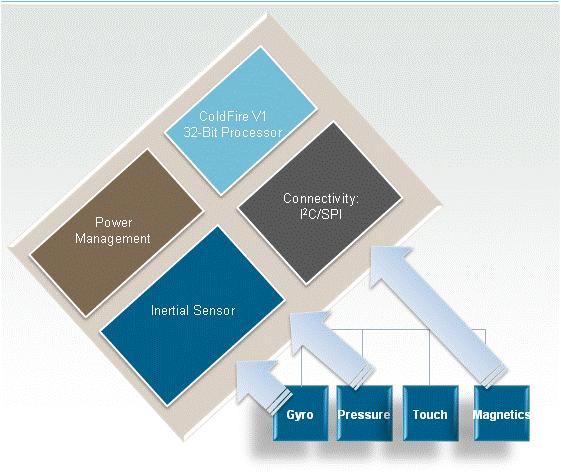

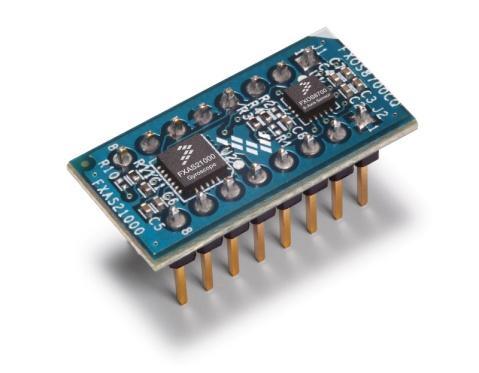
25 Sensor Adapter Board for Demonstration FXCL tools for Sensor Hub and gyro applications 9-Axis DIP for Prototyping Xtrinsic ISF Gyro Adapters available TM 25

26 High Demo of key functionality ODR, FS, HPF, Sample Time, Data logger TM 26
27 Q&A Rodrigo Rodrigues Field Application Engineer F: Date: 30/01/2014 TM 27
28 TM
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
EE 570: Location and Navigation
 EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
EE C245 / ME C218 INTRODUCTION TO MEMS DESIGN FALL 2009 PROBLEM SET #7. Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory.
: Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory.") Issued: Thursday, Nov. 24, 2009 PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Issued: Thursday, Nov. 24, 2009 PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
EE C245 / ME C218 INTRODUCTION TO MEMS DESIGN FALL 2011 C. Nguyen PROBLEM SET #7. Table 1: Gyroscope Modeling Parameters
 Issued: Wednesday, Nov. 23, 2011. PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 8, 2011, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Issued: Wednesday, Nov. 23, 2011. PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 8, 2011, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Sensors: a) Gyroscope. Micro Electro-Mechanical (MEM) Gyroscopes: (MEM) Gyroscopes. Needs:
 Gyroscope. Micro Electro-Mechanical (MEM) Gyroscopes: (MEM) Gyroscopes. Needs:") Sensors: Needs: Data redundancy Data for both situations: eclipse and sun Question of sampling frequency Location and size/weight Ability to resist to environment Low consumption Low price a) Gyroscope
Sensors: Needs: Data redundancy Data for both situations: eclipse and sun Question of sampling frequency Location and size/weight Ability to resist to environment Low consumption Low price a) Gyroscope
Silicon Capacitive Accelerometers. Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES
 Business Development Manager VTI TECHNOLOGIES") Silicon Capacitive Accelerometers Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES 1 Measuring Acceleration The acceleration measurement is based on Newton s 2nd law: Let the acceleration
Silicon Capacitive Accelerometers Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES 1 Measuring Acceleration The acceleration measurement is based on Newton s 2nd law: Let the acceleration
EE C245 ME C218 Introduction to MEMS Design Fall 2007
 EE C45 ME C8 Introduction to MEMS Design Fall 007 Prof. Clark T.C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 3: Input Modeling
EE C45 ME C8 Introduction to MEMS Design Fall 007 Prof. Clark T.C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 9470 Lecture 3: Input Modeling
10 Measurement of Acceleration, Vibration and Shock Transducers
 Chapter 10: Acceleration, Vibration and Shock Measurement Dr. Lufti Al-Sharif (Revision 1.0, 25/5/2008) 1. Introduction This chapter examines the measurement of acceleration, vibration and shock. It starts
Chapter 10: Acceleration, Vibration and Shock Measurement Dr. Lufti Al-Sharif (Revision 1.0, 25/5/2008) 1. Introduction This chapter examines the measurement of acceleration, vibration and shock. It starts
MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary
 MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
Locating and supervising relief forces in buildings without the use of infrastructure
 Locating and supervising relief forces in buildings without the use of infrastructure Tracking of position with low-cost inertial sensors Martin Trächtler 17.10.2014 18th Leibniz Conference of advanced
Locating and supervising relief forces in buildings without the use of infrastructure Tracking of position with low-cost inertial sensors Martin Trächtler 17.10.2014 18th Leibniz Conference of advanced
EE 570: Location and Navigation
 EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Navigation Sensors Dr. Kostas Alexis (CSE) Navigation Sensors Providing the capacity to estimate the state of the aerial robot Self-Localize and estimate
CS491/691: Introduction to Aerial Robotics Topic: Navigation Sensors Dr. Kostas Alexis (CSE) Navigation Sensors Providing the capacity to estimate the state of the aerial robot Self-Localize and estimate
EE 570: Location and Navigation
 EE 570: Location and Navigation Sensor Technology Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder Electrical
EE 570: Location and Navigation Sensor Technology Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder Electrical
Static temperature analysis and compensation of MEMS gyroscopes
 Int. J. Metrol. Qual. Eng. 4, 209 214 (2013) c EDP Sciences 2014 DOI: 10.1051/ijmqe/2013059 Static temperature analysis and compensation of MEMS gyroscopes Q.J. Tang 1,2,X.J.Wang 1,Q.P.Yang 2,andC.Z.Liu
Int. J. Metrol. Qual. Eng. 4, 209 214 (2013) c EDP Sciences 2014 DOI: 10.1051/ijmqe/2013059 Static temperature analysis and compensation of MEMS gyroscopes Q.J. Tang 1,2,X.J.Wang 1,Q.P.Yang 2,andC.Z.Liu
Dr inż. Maciej Gucma Pok. 343 (3p.)
") Dr inż. Maciej Gucma m.gucma@am.szczecin.pl www.uais.eu 91 4809 495 Pok. 343 (3p.) Zaliczenie test! Ocena = moja + ocena P. Zieziuli / 2 Non sensitive to magnetic disturbances => can be used also in environment
Dr inż. Maciej Gucma m.gucma@am.szczecin.pl www.uais.eu 91 4809 495 Pok. 343 (3p.) Zaliczenie test! Ocena = moja + ocena P. Zieziuli / 2 Non sensitive to magnetic disturbances => can be used also in environment
MEMS Gyroscope Control Systems for Direct Angle Measurements
 MEMS Gyroscope Control Systems for Direct Angle Measurements Chien-Yu Chi Mechanical Engineering National Chiao Tung University Hsin-Chu, Taiwan (R.O.C.) 3 Email: chienyu.me93g@nctu.edu.tw Tsung-Lin Chen
MEMS Gyroscope Control Systems for Direct Angle Measurements Chien-Yu Chi Mechanical Engineering National Chiao Tung University Hsin-Chu, Taiwan (R.O.C.) 3 Email: chienyu.me93g@nctu.edu.tw Tsung-Lin Chen
E08 Gyroscope Drive Design
 POLITECNICO DI MILANO MSC COURSE - MEMS AND MICROSENSORS - 207/208 E08 Gyroscope Drive Design Paolo Minotti 26/0/207 PROBLEM We have to design the electronic circuit needed to sustain the oscillation of
POLITECNICO DI MILANO MSC COURSE - MEMS AND MICROSENSORS - 207/208 E08 Gyroscope Drive Design Paolo Minotti 26/0/207 PROBLEM We have to design the electronic circuit needed to sustain the oscillation of
Simple piezoresistive accelerometer
 Simple piezoresistive pressure sensor Simple piezoresistive accelerometer Simple capacitive accelerometer Cap wafer C(x)=C(x(a)) Cap wafer may be micromachined silicon, pyrex, Serves as over-range protection,
Simple piezoresistive pressure sensor Simple piezoresistive accelerometer Simple capacitive accelerometer Cap wafer C(x)=C(x(a)) Cap wafer may be micromachined silicon, pyrex, Serves as over-range protection,
Module I Module I: traditional test instrumentation and acquisition systems. Prof. Ramat, Stefano
 Preparatory Course (task NA 3.6) Basics of experimental testing and theoretical background Module I Module I: traditional test instrumentation and acquisition systems Prof. Ramat, Stefano Transducers A
Preparatory Course (task NA 3.6) Basics of experimental testing and theoretical background Module I Module I: traditional test instrumentation and acquisition systems Prof. Ramat, Stefano Transducers A
EE C245 ME C218 Introduction to MEMS Design
 EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 21: Gyros
EE C245 ME C218 Introduction to MEMS Design Fall 2007 Prof. Clark T.-C. Nguyen Dept. of Electrical Engineering & Computer Sciences University of California at Berkeley Berkeley, CA 94720 Lecture 21: Gyros
Transduction Based on Changes in the Energy Stored in an Electrical Field
 Lecture 6- Transduction Based on Changes in the Energy Stored in an Electrical Field Actuator Examples Microgrippers Normal force driving In-plane force driving» Comb-drive device F = εav d 1 ε oε F rwv
Lecture 6- Transduction Based on Changes in the Energy Stored in an Electrical Field Actuator Examples Microgrippers Normal force driving In-plane force driving» Comb-drive device F = εav d 1 ε oε F rwv
Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy
 Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy Micromechanics Ass.Prof. Priv.-Doz. DI Dr. Harald Plank a,b a Institute of Electron Microscopy and Nanoanalysis, Graz
Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy Micromechanics Ass.Prof. Priv.-Doz. DI Dr. Harald Plank a,b a Institute of Electron Microscopy and Nanoanalysis, Graz
Sensors & Actuators. Velocity and acceleration Sensors & Actuators - H.Sarmento
 Sensors & Actuators Velocity and acceleration 014-015 Sensors & Actuators - H.Sarmento Outline Velocity sensors Gyroscopes Accelerometers 014-015 Sensors & Actuators - H.Sarmento 1 Velocity and acceleration
Sensors & Actuators Velocity and acceleration 014-015 Sensors & Actuators - H.Sarmento Outline Velocity sensors Gyroscopes Accelerometers 014-015 Sensors & Actuators - H.Sarmento 1 Velocity and acceleration
Measurement Techniques for Engineers. Motion and Vibration Measurement
 Measurement Techniques for Engineers Motion and Vibration Measurement Introduction Quantities that may need to be measured are velocity, acceleration and vibration amplitude Quantities useful in predicting
Measurement Techniques for Engineers Motion and Vibration Measurement Introduction Quantities that may need to be measured are velocity, acceleration and vibration amplitude Quantities useful in predicting
Multi-Domain Modeling: Electrical and Mechanical
 Filename: AET_lab6b ECE535 Smart Sensors and Fuel Cell Laboratory #6b Objectives: Multi-Domain Modeling: Electrical and Mechanical 1. To study Multi-Domain Modeling, using MEMS Accelerometer.. To learn
Filename: AET_lab6b ECE535 Smart Sensors and Fuel Cell Laboratory #6b Objectives: Multi-Domain Modeling: Electrical and Mechanical 1. To study Multi-Domain Modeling, using MEMS Accelerometer.. To learn
Objectives. Fundamentals of Dynamics: Module 9 : Robot Dynamics & controls. Lecture 31 : Robot dynamics equation (LE & NE methods) and examples
 and examples") \ Module 9 : Robot Dynamics & controls Lecture 31 : Robot dynamics equation (LE & NE methods) and examples Objectives In this course you will learn the following Fundamentals of Dynamics Coriolis component
\ Module 9 : Robot Dynamics & controls Lecture 31 : Robot dynamics equation (LE & NE methods) and examples Objectives In this course you will learn the following Fundamentals of Dynamics Coriolis component
The... of a particle is defined as its change in position in some time interval.
 Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
ᓸᯏ㔚ㆇ ᗵ ℂ ᙥ ޕ ᑞ ᇷ ݾ ᔭ ஃ რऄתᖄ ៰ⷐ ᓸᯏ㔚ᛛⴚ ข ᓸᯏ㔚ㆇ ᗵ ℂ ᧂ น ਯ ᣂᙥ inemo ᘠᕈ㊂
 inemo (MEMS)? MEMS = Micro-Electro-Mechanical System, : / ST (THELMA: THick Epitaxial Layer for Microactuators and Accelerometers) THELMA ST ST ST Source: ifixit teardown report inemo 9 : A+M+G [m/sec²]
inemo (MEMS)? MEMS = Micro-Electro-Mechanical System, : / ST (THELMA: THick Epitaxial Layer for Microactuators and Accelerometers) THELMA ST ST ST Source: ifixit teardown report inemo 9 : A+M+G [m/sec²]
APPLICATIONS OF VIBRATION TRANSDUCERS
 APPLICATIONS OF VIBRATION TRANSDUCERS 1) Measurements on Structures or Machinery Casings: Accelerometers and Velocity Sensors Used in gas turbines, axial compressors, small and mid-size pumps. These sensors
APPLICATIONS OF VIBRATION TRANSDUCERS 1) Measurements on Structures or Machinery Casings: Accelerometers and Velocity Sensors Used in gas turbines, axial compressors, small and mid-size pumps. These sensors
INF5490 RF MEMS. LN03: Modeling, design and analysis. Spring 2008, Oddvar Søråsen Department of Informatics, UoO
 INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
EE565:Mobile Robotics Lecture 6
 EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
Last Name _Piatoles_ Given Name Americo ID Number
 Last Name _Piatoles_ Given Name Americo ID Number 20170908 Question n. 1 The "C-V curve" method can be used to test a MEMS in the electromechanical characterization phase. Describe how this procedure is
Last Name _Piatoles_ Given Name Americo ID Number 20170908 Question n. 1 The "C-V curve" method can be used to test a MEMS in the electromechanical characterization phase. Describe how this procedure is
Modern Inertial Technology
 Modern Inertial Technology Anthony Lawrence Modern Inertial Technology Navigation, Guidance, and Control With 129 Illustrations Springer-Verlag New York Berlin Heidelberg London Paris Tokyo Hong Kong Barcelona
Modern Inertial Technology Anthony Lawrence Modern Inertial Technology Navigation, Guidance, and Control With 129 Illustrations Springer-Verlag New York Berlin Heidelberg London Paris Tokyo Hong Kong Barcelona
E05 Resonator Design
 POLITECNICO DI MILANO MSC COURSE - MEMS AND MICROSENSORS - 2018/2019 E05 Resonator Design Giorgio Mussi 16/10/2018 In this class we will learn how an in-plane MEMS resonator handles process variabilities,
POLITECNICO DI MILANO MSC COURSE - MEMS AND MICROSENSORS - 2018/2019 E05 Resonator Design Giorgio Mussi 16/10/2018 In this class we will learn how an in-plane MEMS resonator handles process variabilities,
Design and characterization of in-plane MEMS yaw rate sensor
 Sādhanā Vol. 34, Part 4, August 2009, pp. 633 642. Printed in India Design and characterization of in-plane MEMS yaw rate sensor K P VENKATESH, NISHAD PATIL, ASHOK KUMAR PANDEY and RUDRA PRATAP CranesSci
Sādhanā Vol. 34, Part 4, August 2009, pp. 633 642. Printed in India Design and characterization of in-plane MEMS yaw rate sensor K P VENKATESH, NISHAD PATIL, ASHOK KUMAR PANDEY and RUDRA PRATAP CranesSci
THE GYROSCOPE REFERENCES
 THE REFERENCES The Feynman Lectures on Physics, Chapter 20 (this has a very nice, intuitive description of the operation of the gyroscope) Copy available at the Resource Centre. Most Introductory Physics
THE REFERENCES The Feynman Lectures on Physics, Chapter 20 (this has a very nice, intuitive description of the operation of the gyroscope) Copy available at the Resource Centre. Most Introductory Physics
The Basic Research for the New Compass System Using Latest MEMS
 International Journal on Marine Navigation and Safety of Sea Transportation Volume 4 Number 3 September 21 The Basic Research for the New Compass System Using Latest MEMS G. Fukuda Graduate Student in
International Journal on Marine Navigation and Safety of Sea Transportation Volume 4 Number 3 September 21 The Basic Research for the New Compass System Using Latest MEMS G. Fukuda Graduate Student in
A new cantilever beam-rigid-body MEMS gyroscope: mathematical model and linear dynamics
 Proceedings of the International Conference on Mechanical Engineering and Mechatronics Toronto, Ontario, Canada, August 8-10 2013 Paper No. XXX (The number assigned by the OpenConf System) A new cantilever
Proceedings of the International Conference on Mechanical Engineering and Mechatronics Toronto, Ontario, Canada, August 8-10 2013 Paper No. XXX (The number assigned by the OpenConf System) A new cantilever
Variable Capacitance Accelerometers: Design and Applications
 Variable Capacitance Accelerometers: Design and Applications Micromachined silicon variable-capacitance accelerometers are designed for easy manufacture and demanding applications. Tom Connolly, Endevco
Variable Capacitance Accelerometers: Design and Applications Micromachined silicon variable-capacitance accelerometers are designed for easy manufacture and demanding applications. Tom Connolly, Endevco
Four Degrees-of-Freedom Micromachined Gyroscope
 Microsystems Laboratory Technical Report Four Degrees-of-Freedom Micromachined Gyroscope Cenk Acar 23 October 2001 Technical Report No: MSL-01003 cfl2001 Cenk Acar Contents Contents List of Figures Abstract
Microsystems Laboratory Technical Report Four Degrees-of-Freedom Micromachined Gyroscope Cenk Acar 23 October 2001 Technical Report No: MSL-01003 cfl2001 Cenk Acar Contents Contents List of Figures Abstract
Control and Self-Calibration of Microscale Rate Integrating Gyroscopes (MRIGs) Fu Zhang. A dissertation submitted in partial satisfaction of the
 Fu Zhang. A dissertation submitted in partial satisfaction of the") Control and Self-Calibration of Microscale Rate Integrating Gyroscopes (MRIGs) by Fu Zhang A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in
Control and Self-Calibration of Microscale Rate Integrating Gyroscopes (MRIGs) by Fu Zhang A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in
CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS
 61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and
61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and
MEMS INERTIAL POWER GENERATORS FOR BIOMEDICAL APPLICATIONS
 MEMS INERTIAL POWER GENERATORS FOR BIOMEDICAL APPLICATIONS P. MIAO, P. D. MITCHESON, A. S. HOLMES, E. M. YEATMAN, T. C. GREEN AND B. H. STARK Department of Electrical and Electronic Engineering, Imperial
MEMS INERTIAL POWER GENERATORS FOR BIOMEDICAL APPLICATIONS P. MIAO, P. D. MITCHESON, A. S. HOLMES, E. M. YEATMAN, T. C. GREEN AND B. H. STARK Department of Electrical and Electronic Engineering, Imperial
DESIGN AND OPTIMIZATION OF BULK MICROMACHINED ACCELEROMETER FOR SPACE APPLICATIONS
 INTERNATIONAL JOURNAL ON SMART SENSING AND INTELLIGENT SYSTEMS, VOL. 1, NO. 4, DECEMBER 008 DESIGN AND OPTIMIZATION OF BULK MICROMACHINED ACCELEROMETER FOR SPACE APPLICATIONS Thampi Paul 1, Jaspreet Singh,
INTERNATIONAL JOURNAL ON SMART SENSING AND INTELLIGENT SYSTEMS, VOL. 1, NO. 4, DECEMBER 008 DESIGN AND OPTIMIZATION OF BULK MICROMACHINED ACCELEROMETER FOR SPACE APPLICATIONS Thampi Paul 1, Jaspreet Singh,
A MODERN MICHELSON-MORLEY EXPERIMENT USING ACTIVELY ROTATED OPTICAL RESONATORS
 A MODERN MICHELSON-MORLEY EXPERIMENT USING ACTIVELY ROTATED OPTICAL RESONATORS S. HERRMANN, A. SENGER, K. MÖHLE, E. V. KOVALCHUK, A. PETERS Institut für Physik, Humboldt-Universität zu Berlin Hausvogteiplatz
A MODERN MICHELSON-MORLEY EXPERIMENT USING ACTIVELY ROTATED OPTICAL RESONATORS S. HERRMANN, A. SENGER, K. MÖHLE, E. V. KOVALCHUK, A. PETERS Institut für Physik, Humboldt-Universität zu Berlin Hausvogteiplatz
DEVELOPMENT OF ANGULAR VELOCITY CALIBRATION FACILITY USING SELF-CALIBRATABLE ROTARY ENCODER
 IMEKO 22 nd TC3, 12 th TC5 and 3 rd TC22 International Conferences 3 to 5 February, 2014, Cape Town, Republic of South Africa DEVELOPMENT OF ANGULAR VELOCITY CALIBRATION FACILITY USING SELF-CALIBRATABLE
IMEKO 22 nd TC3, 12 th TC5 and 3 rd TC22 International Conferences 3 to 5 February, 2014, Cape Town, Republic of South Africa DEVELOPMENT OF ANGULAR VELOCITY CALIBRATION FACILITY USING SELF-CALIBRATABLE
Slide 1. Temperatures Light (Optoelectronics) Magnetic Fields Strain Pressure Displacement and Rotation Acceleration Electronic Sensors
 Magnetic Fields Strain Pressure Displacement and Rotation Acceleration Electronic Sensors") Slide 1 Electronic Sensors Electronic sensors can be designed to detect a variety of quantitative aspects of a given physical system. Such quantities include: Temperatures Light (Optoelectronics) Magnetic
Slide 1 Electronic Sensors Electronic sensors can be designed to detect a variety of quantitative aspects of a given physical system. Such quantities include: Temperatures Light (Optoelectronics) Magnetic
UAV Navigation: Airborne Inertial SLAM
 Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Design, Fabrication and Characterization of MEMS Gyroscopes Based on Frequency Modulation
 Design, Fabrication and Characterization of MEMS Gyroscopes Based on Frequency Modulation by Dawit Effa A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the
Design, Fabrication and Characterization of MEMS Gyroscopes Based on Frequency Modulation by Dawit Effa A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the
Dead Reckoning navigation (DR navigation)
") Dead Reckoning navigation (DR navigation) Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai A Navigation which uses a Inertial
Dead Reckoning navigation (DR navigation) Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai A Navigation which uses a Inertial
Distance Determination between the MINOS Detectors for TOF Measurements. Dr. Virgil Bocean Alignment & Metrology Department Fermilab
 Distance Determination between the MINOS Detectors for TOF Measurements Dr. Virgil Bocean Alignment & Metrology Department Fermilab 1 1 Introduction Part of the neutrino research program at Fermilab is
Distance Determination between the MINOS Detectors for TOF Measurements Dr. Virgil Bocean Alignment & Metrology Department Fermilab 1 1 Introduction Part of the neutrino research program at Fermilab is
Lecture Module 5: Introduction to Attitude Stabilization and Control
 1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
Theory and Design of Micromechanical Vibratory Gyroscopes
 Theory and Design of Micromechanical Vibratory Gyroscopes Vladislav Apostolyuk Ph.D. Principal Research Scientist GN&C Sensors and Systems Introduction Fabrication technologies for microcomponents microsensors
Theory and Design of Micromechanical Vibratory Gyroscopes Vladislav Apostolyuk Ph.D. Principal Research Scientist GN&C Sensors and Systems Introduction Fabrication technologies for microcomponents microsensors
Last Name Minotti Given Name Paolo ID Number
 Last Name Minotti Given Name Paolo ID Number 20180131 Question n. 1 Draw and describe the simplest electrical equivalent model of a 3-port MEMS resonator, and its frequency behavior. Introduce possible
Last Name Minotti Given Name Paolo ID Number 20180131 Question n. 1 Draw and describe the simplest electrical equivalent model of a 3-port MEMS resonator, and its frequency behavior. Introduce possible
Digital Accelerometers and Magnetometers. Design Team 3
 Digital s and s Design Team 3 Master of Ceremonies s and Applications Technical Explanation and Physics s and Applications Technical Explanation Ryan Popa Jeremy Iamurri Yan Sidronio Austin Fletcher Chris
Digital s and s Design Team 3 Master of Ceremonies s and Applications Technical Explanation and Physics s and Applications Technical Explanation Ryan Popa Jeremy Iamurri Yan Sidronio Austin Fletcher Chris
Tracking for VR and AR
 Tracking for VR and AR Hakan Bilen November 17, 2017 Computer Graphics University of Edinburgh Slide credits: Gordon Wetzstein and Steven M. La Valle 1 Overview VR and AR Inertial Sensors Gyroscopes Accelerometers
Tracking for VR and AR Hakan Bilen November 17, 2017 Computer Graphics University of Edinburgh Slide credits: Gordon Wetzstein and Steven M. La Valle 1 Overview VR and AR Inertial Sensors Gyroscopes Accelerometers
Dept. of Electrical & Computer Engineering, Dept. of Mechanical Engineering University of Bridgeport, Bridgeport, CT /08/2015
 Design and Analysis of Three DOF Piezoelectric Vibration Energy Harvester Ravi Teja Purra Reddy, Xingguo Xiong, Junling Hu Dept. of Electrical & Computer Engineering, Dept. of Mechanical Engineering University
Design and Analysis of Three DOF Piezoelectric Vibration Energy Harvester Ravi Teja Purra Reddy, Xingguo Xiong, Junling Hu Dept. of Electrical & Computer Engineering, Dept. of Mechanical Engineering University
ME 515 Mechatronics. Overview of Computer based Control System
 ME 515 Mechatronics Introduction to Sensors I Asanga Ratnaweera Department of Faculty of Engineering University of Peradeniya Tel: 081239 (3627) Email: asangar@pdn.ac.lk Overview of Computer based Control
ME 515 Mechatronics Introduction to Sensors I Asanga Ratnaweera Department of Faculty of Engineering University of Peradeniya Tel: 081239 (3627) Email: asangar@pdn.ac.lk Overview of Computer based Control
SIMPLE HARMONIC MOTION
 SIMPLE HARMONIC MOTION PURPOSE The purpose of this experiment is to investigate simple harmonic motion. We will determine the elastic spring constant of a spring first and then study small vertical oscillations
SIMPLE HARMONIC MOTION PURPOSE The purpose of this experiment is to investigate simple harmonic motion. We will determine the elastic spring constant of a spring first and then study small vertical oscillations
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Experimental analysis of spring hardening and softening nonlinearities in. microelectromechanical oscillators. Sarah Johnson
 Experimental analysis of spring hardening and softening nonlinearities in microelectromechanical oscillators. Sarah Johnson Department of Physics, University of Florida Mentored by Dr. Yoonseok Lee Abstract
Experimental analysis of spring hardening and softening nonlinearities in microelectromechanical oscillators. Sarah Johnson Department of Physics, University of Florida Mentored by Dr. Yoonseok Lee Abstract
Machine Positioning Uncertainty with Laser Interferometer Feedback
 Machine Positioning Uncertainty with Laser Interferometer Feedback The purpose of this discussion is to explain the major contributors to machine positioning uncertainty in systems with laser interferometer
Machine Positioning Uncertainty with Laser Interferometer Feedback The purpose of this discussion is to explain the major contributors to machine positioning uncertainty in systems with laser interferometer
Sensors Fusion for Mobile Robotics localization. M. De Cecco - Robotics Perception and Action
 Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Finite Element Static, Vibration and Impact-Contact Analysis of Micromechanical Systems
 Finite Element Static, Vibration and Impact-Contact Analysis of Micromechanical Systems Alexey I. Borovkov Eugeny V. Pereyaslavets Igor A. Artamonov Computational Mechanics Laboratory, St.Petersburg State
Finite Element Static, Vibration and Impact-Contact Analysis of Micromechanical Systems Alexey I. Borovkov Eugeny V. Pereyaslavets Igor A. Artamonov Computational Mechanics Laboratory, St.Petersburg State
Design of a MEMS Capacitive Comb-drive Accelerometer
 Design of a MEMS Capacitive Comb-drive Accelerometer Tolga Kaya* 1, Behrouz Shiari 2, Kevin Petsch 1 and David Yates 2 1 Central Michigan University, 2 University of Michigan * kaya2t@cmich.edu Abstract:
Design of a MEMS Capacitive Comb-drive Accelerometer Tolga Kaya* 1, Behrouz Shiari 2, Kevin Petsch 1 and David Yates 2 1 Central Michigan University, 2 University of Michigan * kaya2t@cmich.edu Abstract:
A Pendulous Oscillating Gyroscopic Accelerometer Fabricated Using Deep-Reactive Ion Etching
 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 12, NO. 1, FEBRUARY 2003 21 A Pendulous Oscillating Gyroscopic Accelerometer Fabricated Using Deep-Reactive Ion Etching Todd J. Kaiser, Member, IEEE, and
JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 12, NO. 1, FEBRUARY 2003 21 A Pendulous Oscillating Gyroscopic Accelerometer Fabricated Using Deep-Reactive Ion Etching Todd J. Kaiser, Member, IEEE, and
Winmeen Tnpsc Group 1 & 2 Study Materials
 10. Motion - 2 1. What is datum? We take a point on the ground and we measure all distances with respect to this point which we call the datum. 2. What is frame of reference? The three imaginary lines
10. Motion - 2 1. What is datum? We take a point on the ground and we measure all distances with respect to this point which we call the datum. 2. What is frame of reference? The three imaginary lines
DESIGN AND ANALYSIS OF ROTATION RATE SENSOR. Modeling of vibratory MEMs Gyroscope
 DESIGN AND ANALYSIS OF ROTATION RATE SENSOR Modeling of vibratory MEMs Gyroscope 1 Priya.P.Shreshtha & 2 Sushas S.Mohite 1 Mechanical Department, Rajaram Bapu institute of Technology Islampur, Dist. Sangli,
DESIGN AND ANALYSIS OF ROTATION RATE SENSOR Modeling of vibratory MEMs Gyroscope 1 Priya.P.Shreshtha & 2 Sushas S.Mohite 1 Mechanical Department, Rajaram Bapu institute of Technology Islampur, Dist. Sangli,
IMU Filter. Michael Asher Emmanuel Malikides November 5, 2011
 IMU Filter Michael Asher Emmanuel Malikides November 5, 2011 Abstract Despite the ubiquitousness of GPS devices, on board inertial navigation remains important. An IMU like the Sparkfun Ultimate IMU used,
IMU Filter Michael Asher Emmanuel Malikides November 5, 2011 Abstract Despite the ubiquitousness of GPS devices, on board inertial navigation remains important. An IMU like the Sparkfun Ultimate IMU used,
7.Piezoelectric, Accelerometer and Laser Sensors
 7.Piezoelectric, Accelerometer and Laser Sensors 7.1 Piezoelectric sensors: (Silva p.253) Piezoelectric materials such as lead-zirconate-titanate (PZT) can generate electrical charge and potential difference
7.Piezoelectric, Accelerometer and Laser Sensors 7.1 Piezoelectric sensors: (Silva p.253) Piezoelectric materials such as lead-zirconate-titanate (PZT) can generate electrical charge and potential difference
Analysis of the NOT Primary Mirror Dynamics
 Analysis of the NOT Primary Mirror Dynamics Graham C. Cox October 24, 2000 Introduction On the nights of 12th and 13th May 2000 observations were made using the JOSE camera system, borrowed from the ING,
Analysis of the NOT Primary Mirror Dynamics Graham C. Cox October 24, 2000 Introduction On the nights of 12th and 13th May 2000 observations were made using the JOSE camera system, borrowed from the ING,
Modeling and Design of MEMS Accelerometer to detect vibrations on chest wall
 Modeling and Design of MEMS Accelerometer to detect vibrations on chest wall P. Georgia Chris Selwyna 1, J.Samson Isaac 2 1 M.Tech Biomedical Instrumentation, Department of EIE, Karunya University, Coimbatore
Modeling and Design of MEMS Accelerometer to detect vibrations on chest wall P. Georgia Chris Selwyna 1, J.Samson Isaac 2 1 M.Tech Biomedical Instrumentation, Department of EIE, Karunya University, Coimbatore
Chapter 8. Model of the Accelerometer. 8.1 The static model 8.2 The dynamic model 8.3 Sensor System simulation
 Chapter 8. Model of the Accelerometer 8.1 The static model 8.2 The dynamic model 8.3 Sensor System simulation 8.2.1 Basic equations 8.2.2 Resonant frequency 8.2.3 Squeeze-film damping 8.2 The dynamic model
Chapter 8. Model of the Accelerometer 8.1 The static model 8.2 The dynamic model 8.3 Sensor System simulation 8.2.1 Basic equations 8.2.2 Resonant frequency 8.2.3 Squeeze-film damping 8.2 The dynamic model
Inertial Odometry on Handheld Smartphones
 Inertial Odometry on Handheld Smartphones Arno Solin 1 Santiago Cortés 1 Esa Rahtu 2 Juho Kannala 1 1 Aalto University 2 Tampere University of Technology 21st International Conference on Information Fusion
Inertial Odometry on Handheld Smartphones Arno Solin 1 Santiago Cortés 1 Esa Rahtu 2 Juho Kannala 1 1 Aalto University 2 Tampere University of Technology 21st International Conference on Information Fusion
Page AC : INSTRUMENTATION FOR SHOCK AND IMPACT ANALYSIS
 AC 2010-2123: INSTRUMENTATION FOR SHOCK AND IMPACT ANALYSIS Randy Buchanan, University of Southern Mississippi Steven Bunkley, University of Southern Mississippi American Society for Engineering Education,
AC 2010-2123: INSTRUMENTATION FOR SHOCK AND IMPACT ANALYSIS Randy Buchanan, University of Southern Mississippi Steven Bunkley, University of Southern Mississippi American Society for Engineering Education,
Foundations of MEMS. Chang Liu. McCormick School of Engineering and Applied Science Northwestern University. International Edition Contributions by
 Foundations of MEMS Second Edition Chang Liu McCormick School of Engineering and Applied Science Northwestern University International Edition Contributions by Vaishali B. Mungurwadi B. V. Bhoomaraddi
Foundations of MEMS Second Edition Chang Liu McCormick School of Engineering and Applied Science Northwestern University International Edition Contributions by Vaishali B. Mungurwadi B. V. Bhoomaraddi
2. (a) Differentiate between rare metal thermocouples and base metal thermocouples.
 Differentiate between rare metal thermocouples and base metal thermocouples.") Code No: R05410304 Set No. 1 1. (a) Distinguish between direct and indirect methods of measurement with suitable examples. (b) What are desired, modifying and interfering inputs for an instrumentation
Code No: R05410304 Set No. 1 1. (a) Distinguish between direct and indirect methods of measurement with suitable examples. (b) What are desired, modifying and interfering inputs for an instrumentation
MEAM 510 Fall 2011 Bruce D. Kothmann
 Balancing g Robot Control MEAM 510 Fall 2011 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Balancing g Robot Control MEAM 510 Fall 2011 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
The secondary winding have equal no. of turns. The secondary windings are placed identically on either side of the primary winding.
 UNIT 4 DISPLACEMENT MEASURMENT Electrical comparator Working principle of Electrical comparators: These instruments are based on the theory of Wheatstone A.C. Bridge. When the bridge is electrically balanced,
UNIT 4 DISPLACEMENT MEASURMENT Electrical comparator Working principle of Electrical comparators: These instruments are based on the theory of Wheatstone A.C. Bridge. When the bridge is electrically balanced,
Capacitive Sensor Interfaces
 Capacitive Sensor Interfaces Bernhard E. Boser Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley Capacitive Sensor Interfaces 1996
Capacitive Sensor Interfaces Bernhard E. Boser Berkeley Sensor & Actuator Center Dept. of Electrical Engineering and Computer Sciences University of California, Berkeley Capacitive Sensor Interfaces 1996
CHAPTER 5 FIXED GUIDED BEAM ANALYSIS
 77 CHAPTER 5 FIXED GUIDED BEAM ANALYSIS 5.1 INTRODUCTION Fixed guided clamped and cantilever beams have been designed and analyzed using ANSYS and their performance were calculated. Maximum deflection
77 CHAPTER 5 FIXED GUIDED BEAM ANALYSIS 5.1 INTRODUCTION Fixed guided clamped and cantilever beams have been designed and analyzed using ANSYS and their performance were calculated. Maximum deflection
Dynamics of structures
 Dynamics of structures 2.Vibrations: single degree of freedom system Arnaud Deraemaeker (aderaema@ulb.ac.be) 1 Outline of the chapter *One degree of freedom systems in real life Hypothesis Examples *Response
Dynamics of structures 2.Vibrations: single degree of freedom system Arnaud Deraemaeker (aderaema@ulb.ac.be) 1 Outline of the chapter *One degree of freedom systems in real life Hypothesis Examples *Response
Microsensors. G.K. Ananthasuresh Professor, Mechanical Engineering Indian Institute of Science Bangalore, , India
 Microsensors G.K. Ananthasuresh Professor, Mechanical Engineering Indian Institute of Science Bangalore, 560012, India What are sensors? Sensors measure something, which we call a measurand. There are
Microsensors G.K. Ananthasuresh Professor, Mechanical Engineering Indian Institute of Science Bangalore, 560012, India What are sensors? Sensors measure something, which we call a measurand. There are
Expected Performance From WIYN Tip-Tilt Imaging
 Expected Performance From WIYN Tip-Tilt Imaging C. F. Claver 3 September 1997 Overview Image motion studies done at WIYN show that a significant improvement to delivered image quality can be obtained from
Expected Performance From WIYN Tip-Tilt Imaging C. F. Claver 3 September 1997 Overview Image motion studies done at WIYN show that a significant improvement to delivered image quality can be obtained from
VN-100 Velocity Compensation
 VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
E09 Gyroscope Sense Design
 POLITECNICO DI MILANO MSC COURSE - MEMS AND MICROSENSORS - 07/08 E09 Gyroscope Sense Design Paolo Minotti 3/0/07 In this class we will learn how to design the readout electronics of a MEMS gyroscope, with
POLITECNICO DI MILANO MSC COURSE - MEMS AND MICROSENSORS - 07/08 E09 Gyroscope Sense Design Paolo Minotti 3/0/07 In this class we will learn how to design the readout electronics of a MEMS gyroscope, with
MULTIVARIABLE PID CONTROLLERS VIA LMI APPROACH APPLIED TO A GYROMETER
 TVBE D CTES V C ED T YETE Boivin B ambault Coirault ehdi D Bosche J rambault(or boivin or coirault or mehdi)@esipuniv-poitiersfr -ES 4 venue de ecteur ineau 86 oitiers -FCE Telephone number () 549 64 Fax-number
TVBE D CTES V C ED T YETE Boivin B ambault Coirault ehdi D Bosche J rambault(or boivin or coirault or mehdi)@esipuniv-poitiersfr -ES 4 venue de ecteur ineau 86 oitiers -FCE Telephone number () 549 64 Fax-number
Spring 2009 EE 710: Nanoscience and Engineering
 Spring 009 EE 710: Nanoscience and Engineering Part 8: Sprintronics Images and figures supplied from Goddard, et.al, Handbook of Nanoscience, Engineering, and Technology, CRC Press, 004 and other refereed
Spring 009 EE 710: Nanoscience and Engineering Part 8: Sprintronics Images and figures supplied from Goddard, et.al, Handbook of Nanoscience, Engineering, and Technology, CRC Press, 004 and other refereed
Fundamentals of attitude Estimation
 Fundamentals of attitude Estimation Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Basically an IMU can used for two
Fundamentals of attitude Estimation Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Basically an IMU can used for two
Inertial Frame frame-dragging
 Frame Dragging Frame Dragging An Inertial Frame is a frame that is not accelerating (in the sense of proper acceleration that would be detected by an accelerometer). In Einstein s theory of General Relativity
Frame Dragging Frame Dragging An Inertial Frame is a frame that is not accelerating (in the sense of proper acceleration that would be detected by an accelerometer). In Einstein s theory of General Relativity
An ion follows a circular path in a uniform magnetic field. Which single change decreases the radius of the path?
 T5-1 [237 marks] 1. A circuit is formed by connecting a resistor between the terminals of a battery of electromotive force (emf) 6 V. The battery has internal resistance. Which statement is correct when
T5-1 [237 marks] 1. A circuit is formed by connecting a resistor between the terminals of a battery of electromotive force (emf) 6 V. The battery has internal resistance. Which statement is correct when
MEAM 510 Fall 2012 Bruce D. Kothmann
 Balancing g Robot Control MEAM 510 Fall 2012 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Balancing g Robot Control MEAM 510 Fall 2012 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Inertial Navigation and Various Applications of Inertial Data. Yongcai Wang. 9 November 2016
 Inertial Navigation and Various Applications of Inertial Data Yongcai Wang 9 November 2016 Types of Gyroscope Mechanical Gyroscope Laser Gyroscope Sagnac Effect Stable Platform IMU and Strapdown IMU In
Inertial Navigation and Various Applications of Inertial Data Yongcai Wang 9 November 2016 Types of Gyroscope Mechanical Gyroscope Laser Gyroscope Sagnac Effect Stable Platform IMU and Strapdown IMU In
Determining absolute orientation of a phone by imaging celestial bodies
 Technical Disclosure Commons Defensive Publications Series October 06, 2017 Determining absolute orientation of a phone by imaging celestial bodies Chia-Kai Liang Yibo Chen Follow this and additional works
Technical Disclosure Commons Defensive Publications Series October 06, 2017 Determining absolute orientation of a phone by imaging celestial bodies Chia-Kai Liang Yibo Chen Follow this and additional works
PREMED COURSE, 14/08/2015 OSCILLATIONS
 PREMED COURSE, 14/08/2015 OSCILLATIONS PERIODIC MOTIONS Mechanical Metronom Laser Optical Bunjee jumping Electrical Astronomical Pulsar Biological ECG AC 50 Hz Another biological exampe PERIODIC MOTIONS
PREMED COURSE, 14/08/2015 OSCILLATIONS PERIODIC MOTIONS Mechanical Metronom Laser Optical Bunjee jumping Electrical Astronomical Pulsar Biological ECG AC 50 Hz Another biological exampe PERIODIC MOTIONS
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
Physics Higher level Paper 1
 Physics Higher level Paper 1 Tuesday 31 October 17 (afternoon) 1 hour Instructions to candidates Do not open this examination paper until instructed to do so. Answer all the questions. For each question,
Physics Higher level Paper 1 Tuesday 31 October 17 (afternoon) 1 hour Instructions to candidates Do not open this examination paper until instructed to do so. Answer all the questions. For each question,
Angle estimation using gyros and accelerometers
 Lab in Dynamical systems and control TSRT21 Angle estimation using gyros and accelerometers This version: January 25, 2017 Name: LERTEKNIK REG P-number: Date: AU T O MA R TI C C O N T OL Passed: LINKÖPING
Lab in Dynamical systems and control TSRT21 Angle estimation using gyros and accelerometers This version: January 25, 2017 Name: LERTEKNIK REG P-number: Date: AU T O MA R TI C C O N T OL Passed: LINKÖPING