Fundamentals of attitude Estimation
|
|
|
- Leo Joseph
- 5 years ago
- Views:
Transcription




1 Fundamentals of attitude Estimation Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai
2 Basically an IMU can used for two main purposes To measure aircraft attitude information ( Pitch, Roll and yaw) Accelerometers to measure pith and roll information Gyroscope to measure pitch, roll and yaw information Magnetometer to measure pitch and roll information To measure aircraft position information (Dead Reckoning) Stable platform (Gyros and Accelerometer are mounted on a gimbal platform) Strap down platform (Gyros and Accelerometer are Strapped it on body of an aircraft)

3 Pitch Roll Yaw

 F g Force due to gravity expressed")
4 Estimation of Angle with Accelerometer Three-axis accelerometer can be modeled as 1 am F F m g am measured acceleration m mass of the body F sum of all forces acts on body expressed in bodyframe (includesgravity) F g Force due to gravity expressed in bodyframe
5 we assume that F=0 then the output of accelerometer is a m F m 0 In inertial frame force of gravity is expressed as 0 mg g Rotating the gravity into the body frame of the sensor 0 - mg sin( ) B Fg RI 0 mg cos( )sin( ) mg mg cos( )cos( )
6 The expected accelerometer data in the body frame is defined by a m g sin( ) -gcos( )sin( ) -g cos( )cos( ) Let the component of acceleration is defined by its axis accel accel amx arc sin g amy arctan amz
7 The measured angles are only the estimated angles not the actual angels. This method provides quick and very simple way of estimating pitch and roll angle from the accelerometer. However we assumed that the forces acting on the accelerometer was only gravity. Vibration and other external forces will affect our pitch and roll angle measurement.
8 Estimation of Angle with Gyroscope Rate gyro can also be used to measure the attitude of vehicle. unlike accelerometer rate gyros are not affect by external acceleration and external forces. Gyro based measurement is immune to external forces. Since roll, pitch, and yaw each occur in different reference frames, we need to take the rate gyro outputs and rotate them into the appropriate frames in order to get the Euler's rate.
9 .. p qsin tan( ) rcos tan( ) qcos rsin. sin cos q r cos cos ( dt * ) gyro gyro ( dt * ) gyro gyro ( dt * ) gyro gyro This method helps to use rate gyros to estimate angles that are not sensitive to vibration and other external forces. However rate gyros are noisy and imperfect, every time we add new gyro measurements, we add errors to our angle estimates. Over time, errors will accumulate, causing ourgyro-based angles estimates to drift over time....
10 Combining accelerometer and rate Gyro data Angle estimate based on rate gyros alone drift over time, making them unreliable in the long-term purpose or application. Angle estimates based on accelerometers do not cause angle estimates to drift, but they are sensitive to external forces like vibration, making short-term estimates unreliable. Here we are going to discuss about how to combine the outputs of both types of sensor to produce angle estimates that are resistant to both vibration and immune to long-term drift. Here the step is classified into two types Prediction (by using gyroscope reading to measure incremental changes in the angle).
11 Estimation (by means of using accelerometer reading to correct the rate gyro drift). In updating step we assume accelerometer based angle estimation is close to true value. We take the measured angle (from the accelerometers) and the predicted angle (from the rate gyros), compute the difference, and add a portion of the difference to the final angle estimate. estimate gyro L accel gyro estimate gyro L accel gyro estimate gyro L mag gyro
12 L is numeric value between 0 and 1. if L if L 0 gyro based angle mesurement is used (accelerometer measurment become zero) 1 accelerometer based angle mesurement is used (gyros measurment become zero) As approaches L=1, the accelerometers are trusted more and the rate gyros are trusted less. This makes the angle estimates less sensitive to rate gyro noise and biases, but more sensitive to vibration and other external forces. As approaches L=0, rate gyros are trusted more and the accelerometers are trusted less. This makes the angle estimates more sensitive to rate gyro noise and biases, but less sensitive to vibration and other external forces.
13 This formulation can be called a fixed-gain observer and it looks similar to that of Complementry Filter and Kalman Filter. The main difference is that in a Kalman Filter, the observer gain optimally using known characteristics of the physical system. is selected In addition, a Kalman Filter can exploit knowledge of the physical system so that accelerometer data (and other data) needn t be converted to angles before using it to make corrections to the angle estimates.
14 Complementary filter angle = 0.98*(angle+ gyrodata*dt) *(accData);

15 Is Accelerometer helps to measure velocity and position?
16 The answer is yes and no. It depends upon how much accuracy we are in needed for our application. The low cost accelerometer are very less in accuracy result in every poor estimation in position and velocity. The accuracy not only because of low cost sensor but also for misalignment of sensor position in the body frame. Small misalignment errors may leads to high errors in acceleration measurement, which translate into more error in velocity estimation and much more error in position estimate.
17 Estimation of Position and velocity V P i i a i a i V i P a i i inertial frame Velocity inertial frame Position Inertial frame acceleration But in practical Vi Vi ( dt * ai) Vidt * a Pi Pi ( dt * Vi) P i dt * V i i

18 Expected Accuracy of Velocity and Position Estimates
19 How to reduce the error? Reduce the Distortions caused by an Accelerometer. Reduce the Distortions caused by gyroscope. Reduce the Distortions caused by Magnetometer. By using any sensor fusion technique. (Eg.GPS INS Integration).
20 Distortions by Accelerometer The simplified accelerometer mentioned in the above equation will not consider the account of cross-axis misalignment, temperature varying output bias and scale factors. All these factor will affects accelerometer sensor output and affect accuracy of velocity and position measurement. The more complete model of the accelerometer is given below 1 a M S T m a a( )(F F g) (t) m Ma acceleration misalignment matrix (t) Vector of temperature varying bias Sa( T) Diagonal temperature varying accelerometer Sensitivity matrix
21 Sax 0 0 Sa( T ) 0 Say S The sensitivity matrix encodes expected accelerometer raw output for a given measured acceleration. The misalignment matrix describes the effect of cross-axis misalignment unlike bias and sensitivity terms, it is not affected be temperature. az
22 When using accelerometer data, we measure only value, is a m but what we really needed is the actual acceleration a mc before scale factors, biases, and misalignment distort the measurement. That is, we want to take the measurement and extractamc the term. Solving, we get amc 1 1 amc Sa T Ma am a T ( ) ( ) corrected accelerometer measurement vector In order to obtain the best accuracy, the terms should be determined experimentally over the full operating temperature of the sensor
23 Distortions by Gyroscope Let the Vector P is defined as 1 1 P Sg T Mg pm g T p p q r ( ) ( ) a Cga* mc pm Usually coupling between the acceleration and rate gyro output C ga is small enough that can be neglected, but in high acceleration is expected (e.g. on a rocket), this term must be measured and included in the model for the best accuracy. C ga measured angular rate vector matrix encoding the sensitivity of rate gyro axes to acceleration amc corrected accelerometer measur e em nt
24 Distortions by Magnetometer Magnetometer are very trick one to calibrate. Like accelerometer and gyroscope magnetometer also subject to cross-axis misalignment, output bias,scale factors. In addition to that, local magnetic field around the magnetometer can be distorted by magnetic and ferrous metal objects. This distortion must be measured and corrected in order for the magnetometer to be useful. The field can also be distorted by time-varying electromagnetic waves from highpower electrical lines and communication lines placed near the sensor. Finally, as the sensor is moved around in practice, the field can be distorted so that, in certain locations (say, next to a concrete wall filled with rebar), the accuracy of the measurement is reduced.
25 1 1 b= Sb ( T) Mb bm b( T) b magnetic field b S m Measured magnetic field 1 b M 1 b inverse of the magnetometer sensitive matrix inverse of the magnetometer misalignment matrix b( T ) magnetometer bias vector After the magnetometer measurement is corrected for axis misalignment, scale factor, and bias errors, it must be corrected for additional local magnetic field distortions.
26 Two types of local distortions are there Soft-Iron Distortion. Hard -Iron Distortion. A soft-iron field distortion is caused by ferrous metal objects that bend the Earth s magnetic field e.g. Screws A hard-iron distortion is caused by near by object having its own magnetic field like permanent magnets motor or current carrying conductors. In the absence of any hard or soft-iron distortions, the outputs of the magnetometer as it is rotated should trace out a perfect sphere centered around zero. Soft-iron distortions distort the sphere so that it appears to be an ellipsoid. Hardiron distortions shift the mean of the sphere away from zero
27 One way to calibrate the magnetometer for hard and soft iron distortions is to fit an ellipsoid to a set of magnetometer data collected over a wide variety of different orientations. The center of the ellipsoid is equivalent to the bias caused by hard iron distortions, while the ellipsoid shape on the x, y, and z axes are caused by the soft-iron distortions. A correction matrix can then be calculated that, when multiplied by the magnetometer measurements, alters the ellipsoid so that it looks like a sphere again.
28 Sensor data fusion
29 The sensor fusion can be implemented by some of the steps below -Complementary Filter (CF) -Kalman Filter (KF) -Extended Kalman Filter (EKF) -Unscented Kalman Filter (UKF) -Particle Filter (PF)
30 Nothing but fusion of data s from two or more sensor. The data measured from a single sensor not gives accurate measurement of reading. It may suffer from some noise,errors,misalignment and external disturbance. In order to measure the exact physical quantity of data,two or more sensors are used. these data's are fused in such a way it will provide original measurement of the physical quantity.
31 Combining accelerometer and rate Gyro data Angle estimates based on rate gyros alone drift over time, making them unreliable in the long-term purpose or application. Angle estimates based on accelerometers do not cause angle estimates to drift, but they are sensitive to external forces like vibration, making short-term estimates unreliable. Here we are going to discuss about how to combine the outputs of both types of sensor to produce angle estimates that are resistant to both vibration and immune to long-term drift. Here the step is classified into two types Prediction (by using gyroscope reading to measure incremental changes in the angle).
32 Estimation (by means of using accelerometer reading to correct the rate gyro drift). In updating step we assume accelerometer based angle estimation is close to true value. We take the measured angle (from the accelerometers) and the predicted angle (from the rate gyros), compute the difference, and add a portion of the difference to the final angle estimate. estimate gyro L accel gyro estimate gyro L accel gyro estimate gyro L mag gyro
33 L is numeric value between 0 and 1. if L if L 0 gyro based angle mesurement is used (accelerometer measurment become zero) 1 accelerometer based angle mesurement is used (gyros measurment become zero) As approaches L=1, the accelerometers are trusted more and the rate gyros are trusted less. This makes the angle estimates less sensitive to rate gyro noise and biases, but more sensitive to vibration and other external forces. As approaches L=0, rate gyros are trusted more and the accelerometers are trusted less. This makes the angle estimates more sensitive to rate gyro noise and biases, but less sensitive to vibration and other external forces.
34 This formulation can be called a fixed-gain observer and it looks similar to that of Kalman Filter. The main difference is that in a Kalman Filter, the observer gain optimally using known characteristics of the physical system. is selected In addition, a Kalman Filter can exploit knowledge of the physical system so that accelerometer data (and other data) needn t be converted to angles before using it to make corrections to the angle estimates.
 + 0.")
35 Complementary filter angle = 0.98*(angle+ gyrodata*dt) *(accData);

36 Combining Barometer 1&2 using Complementary filter Barometer 1 Barometer 2 Haltitude H Barometer 2 L HBarometer 1 HBarometer 2

37 Combining Barometer Altitude and Sonar using Complementary filter Barometer Haltitude H Ultrasonic sensor L HBarometer HUltrasonic sensor Ultrasonic Sensor

38 Combining Barometer Altitude Infrared sensor using Complementary filter Barometer Infrared Proximity sensor Haltitude H Infrared Proximity sensor L HBarometer HInfrared Proximity sensor
39 Combining GPS altitude and Barometer Altitude using Complementary filter GPS Barometer Haltitude H Barosensor L HGpsreceiver HBarometer
40 A prime meridian is a meridian, i.e., a line of longitude, at which longitude is defined to be 0. This great circle divides the sphere, e.g., the Earth, into two hemispheres. If one uses directions of East and West from a defined prime meridian, then they can be called Eastern Hemisphere and Western Hemisphere. Prime meridian connects pole to poles covers a distance of about 20,000 km. Why does the Prime Meridian (Zero Longitude) pass through Greenwich? -The International Meridian Conference took place in October 1884 in Washington DC. Twenty-five nations were represented at the conference by 41 delegates. The Greenwich Meridian was chosen to become the Prime Meridian of the World. There were several reasons for this; the main one being that nearly two thirds of the World's ships were already using charts based on it.
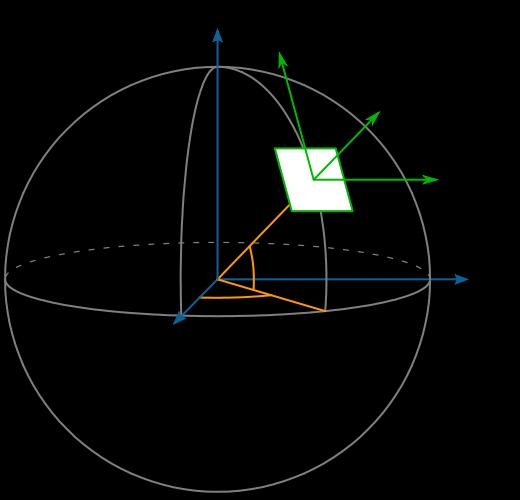
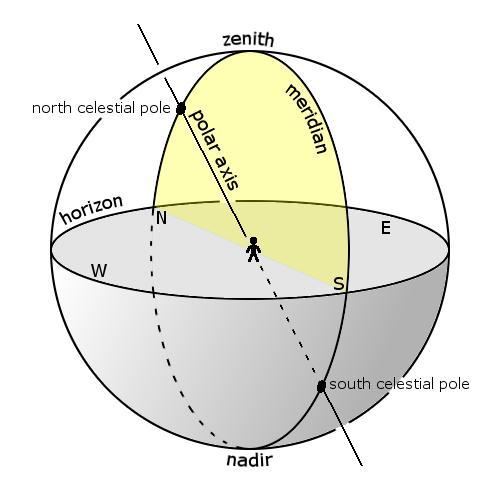
41 Latitude tells you how far north or south of the Equator you are located. Longitude is the location of a place east or west of a north-south line called the prime meridian. Longitude is measured in angles ranging from 0 at the Prime Meridian to 180 at the International Date Line. Local meridian is a great circle passing through celestial poles and zenith of a particular location.

42
43
44
45 A clock wise rotation over east axis by an angle 90 to align the up axis with the z axis R 1 2 A clock wise rotation over z axis by an angle 90 to align the east axis with the x axis R 3 2 From NED Frame to ECEF xecef sin cos sin cos cos xk y ECEF cos sin sin sin cos y k zecef 0 cos sin zk NED
46 x y z ECEF ECEF ECEF ( sin,cos,0) cos sin, sin sin, cos cos cos,sin cos,sin cos 1 T From ECEF to NED Frame Ri( ) i. e Ri ( ) Ri Ri ( ) xk xecef y k R1 * R 3 y ECEF 2 2 zk zecef NED xk sin cos 0 xecef y k cos sin sin sin cos y ECEF zk cos cos sin cos sin zecef NED x y z k k k sin cos sin, cos cos cos, sin sinsin cos 0, cos,sin
47 Coordinate conversion from geodetic lat, lon & height to ECEF frame a cos x, h cos Lat Lon ECEF k k k k k a sin y, h cos Lat Lon ECEF k k k k k a 1 e 2 z, h cos Lat Lon cos ECEF k k k k k a earth' s semi major axis in meters ( a m) e h square of the first numerical eccentricity of ellipsoid ( e *10 ) k altitude of the vehicle rf reciprocal flatting ( rf ) 2 2 rf rf Latk k 1 2* *sin
48 The Earth Centered Earth Fixed (ECEF) frame is converted into NED frame by using the rotational matrix. x sin Lon cos Lon 0 x, xref k k k ECEF k ECEF y sin Lat cos Lon sin Lat sin Lon cos Lat y, yref k k k k k k ECEF k ECEF k k k k k k ECEF k ECEF z cos Lat cos Lon cos Lat sinlon sin Lat z, zref NED
49 Combining INS position with GPS Position using Complementary filter INS GPS Inertial Sensor
50
51 Thank you
Dead Reckoning navigation (DR navigation)
") Dead Reckoning navigation (DR navigation) Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai A Navigation which uses a Inertial
Dead Reckoning navigation (DR navigation) Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai A Navigation which uses a Inertial
EE565:Mobile Robotics Lecture 6
 EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
VN-100 Velocity Compensation
 VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
EE 570: Location and Navigation
 EE 570: Location and Navigation Navigation Mathematics: Coordinate Frames Kevin Wedeward Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen
EE 570: Location and Navigation Navigation Mathematics: Coordinate Frames Kevin Wedeward Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen
Application of state observers in attitude estimation using low-cost sensors
 Application of state observers in attitude estimation using low-cost sensors Martin Řezáč Czech Technical University in Prague, Czech Republic March 26, 212 Introduction motivation for inertial estimation
Application of state observers in attitude estimation using low-cost sensors Martin Řezáč Czech Technical University in Prague, Czech Republic March 26, 212 Introduction motivation for inertial estimation
Quaternion based Extended Kalman Filter
 Quaternion based Extended Kalman Filter, Sergio Montenegro About this lecture General introduction to rotations and quaternions. Introduction to Kalman Filter for Attitude Estimation How to implement and
Quaternion based Extended Kalman Filter, Sergio Montenegro About this lecture General introduction to rotations and quaternions. Introduction to Kalman Filter for Attitude Estimation How to implement and
EE 570: Location and Navigation
 EE 570: Location and Navigation Aided INS Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder Electrical and Computer
EE 570: Location and Navigation Aided INS Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen Bruder Electrical and Computer
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Determining absolute orientation of a phone by imaging celestial bodies
 Technical Disclosure Commons Defensive Publications Series October 06, 2017 Determining absolute orientation of a phone by imaging celestial bodies Chia-Kai Liang Yibo Chen Follow this and additional works
Technical Disclosure Commons Defensive Publications Series October 06, 2017 Determining absolute orientation of a phone by imaging celestial bodies Chia-Kai Liang Yibo Chen Follow this and additional works
Attitude Estimation Version 1.0
 Attitude Estimation Version 1. Francesco Farina May 23, 216 Contents 1 Introduction 2 2 Mathematical background 2 2.1 Reference frames and coordinate systems............. 2 2.2 Euler angles..............................
Attitude Estimation Version 1. Francesco Farina May 23, 216 Contents 1 Introduction 2 2 Mathematical background 2 2.1 Reference frames and coordinate systems............. 2 2.2 Euler angles..............................
with Application to Autonomous Vehicles
 Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Fundamentals of Satellite technology
 Fundamentals of Satellite technology Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Orbital Plane All of the planets,
Fundamentals of Satellite technology Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Orbital Plane All of the planets,
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors
 Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
Rao-Blackwellized Particle Filtering for 6-DOF Estimation of Attitude and Position via GPS and Inertial Sensors GRASP Laboratory University of Pennsylvania June 6, 06 Outline Motivation Motivation 3 Problem
Fundamentals of High Accuracy Inertial Navigation Averil B. Chatfield Table of Contents
 Navtech Part #2440 Preface Fundamentals of High Accuracy Inertial Navigation Averil B. Chatfield Table of Contents Chapter 1. Introduction...... 1 I. Forces Producing Motion.... 1 A. Gravitation......
Navtech Part #2440 Preface Fundamentals of High Accuracy Inertial Navigation Averil B. Chatfield Table of Contents Chapter 1. Introduction...... 1 I. Forces Producing Motion.... 1 A. Gravitation......
UAV Navigation: Airborne Inertial SLAM
 Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Cubature Particle filter applied in a tightly-coupled GPS/INS navigation system
 Cubature Particle filter applied in a tightly-coupled GPS/INS navigation system Yingwei Zhao & David Becker Physical and Satellite Geodesy Institute of Geodesy TU Darmstadt 1 Yingwei Zhao & David Becker
Cubature Particle filter applied in a tightly-coupled GPS/INS navigation system Yingwei Zhao & David Becker Physical and Satellite Geodesy Institute of Geodesy TU Darmstadt 1 Yingwei Zhao & David Becker
NAWCWPNS TM 8128 CONTENTS. Introduction Two-Dimensinal Motion Three-Dimensional Motion Nonrotating Spherical Earth...
 CONTENTS Introduction... 3 Two-Dimensinal Motion... 3 Three-Dimensional Motion... 5 Nonrotating Spherical Earth...10 Rotating Spherical Earth...12 WGS84...14 Conclusion...14 Appendixes: A. Kalman Filter...15
CONTENTS Introduction... 3 Two-Dimensinal Motion... 3 Three-Dimensional Motion... 5 Nonrotating Spherical Earth...10 Rotating Spherical Earth...12 WGS84...14 Conclusion...14 Appendixes: A. Kalman Filter...15
Lecture. Aided INS EE 570: Location and Navigation. 1 Overview. 1.1 ECEF as and Example. 1.2 Inertial Measurements
 Lecture Aided EE 570: Location and Navigation Lecture Notes Update on April 13, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico Tech In collaoration with Stephen Bruder,
Lecture Aided EE 570: Location and Navigation Lecture Notes Update on April 13, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico Tech In collaoration with Stephen Bruder,
Two dimensional rate gyro bias estimation for precise pitch and roll attitude determination utilizing a dual arc accelerometer array
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections -- Two dimensional rate gyro bias estimation for precise pitch and roll attitude determination utilizing a dual
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections -- Two dimensional rate gyro bias estimation for precise pitch and roll attitude determination utilizing a dual
Sensors Fusion for Mobile Robotics localization. M. De Cecco - Robotics Perception and Action
 Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Low-Cost Integrated Navigation System
 Institute of Flight System Dynamics Technische Universität München Prof. Dr.-Ing. Florian Holzapfel Eecuted at Robotics and Automation Lab Centre for Intelligent Information Processing Systems University
Institute of Flight System Dynamics Technische Universität München Prof. Dr.-Ing. Florian Holzapfel Eecuted at Robotics and Automation Lab Centre for Intelligent Information Processing Systems University
GPS/INS Tightly coupled position and attitude determination with low-cost sensors Master Thesis
 GPS/INS Tightly coupled position and attitude determination with low-cost sensors Master Thesis Michele Iafrancesco Institute for Communications and Navigation Prof. Dr. Christoph Günther Supervised by
GPS/INS Tightly coupled position and attitude determination with low-cost sensors Master Thesis Michele Iafrancesco Institute for Communications and Navigation Prof. Dr. Christoph Günther Supervised by
Attitude Determination System of Small Satellite
 Attitude Determination System of Small Satellite Satellite Research Centre Jiun Wei Chia, M. Sheral Crescent Tissera and Kay-Soon Low School of EEE, Nanyang Technological University, Singapore 24 th October
Attitude Determination System of Small Satellite Satellite Research Centre Jiun Wei Chia, M. Sheral Crescent Tissera and Kay-Soon Low School of EEE, Nanyang Technological University, Singapore 24 th October
State-Estimator Design for the KTH Research Concept Vehicle
 DEGREE PROJECT IN VEHICLE ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2016 State-Estimator Design for the KTH Research Concept Vehicle FAN GAO KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF ENGINEERING
DEGREE PROJECT IN VEHICLE ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2016 State-Estimator Design for the KTH Research Concept Vehicle FAN GAO KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF ENGINEERING
How do we describe a location on Earth? Geodetic reference system
 How do we describe a location on Earth? Geodetic reference system How do we define the shape of the earth? Definition of the sphere: A three-dimensional surface, all points of which are equidistant from
How do we describe a location on Earth? Geodetic reference system How do we define the shape of the earth? Definition of the sphere: A three-dimensional surface, all points of which are equidistant from
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
Angle estimation using gyros and accelerometers
 Angle estimation using gyros and accelerometers This version: January 23, 2018 Name: LERTEKNIK REG P-number: Date: AU T O MA RO TI C C O N T L Passed: LINKÖPING Chapter 1 Introduction The purpose of this
Angle estimation using gyros and accelerometers This version: January 23, 2018 Name: LERTEKNIK REG P-number: Date: AU T O MA RO TI C C O N T L Passed: LINKÖPING Chapter 1 Introduction The purpose of this
Automated Tuning of the Nonlinear Complementary Filter for an Attitude Heading Reference Observer
 Automated Tuning of the Nonlinear Complementary Filter for an Attitude Heading Reference Observer Oscar De Silva, George K.I. Mann and Raymond G. Gosine Faculty of Engineering and Applied Sciences, Memorial
Automated Tuning of the Nonlinear Complementary Filter for an Attitude Heading Reference Observer Oscar De Silva, George K.I. Mann and Raymond G. Gosine Faculty of Engineering and Applied Sciences, Memorial
A Low-Cost GPS Aided Inertial Navigation System for Vehicular Applications
 A Low-Cost GPS Aided Inertial Navigation System for Vehicular Applications ISAAC SKOG Master of Science Thesis Stockholm, Sweden 2005-03-09 IR-SB-EX-0506 1 Abstract In this report an approach for integration
A Low-Cost GPS Aided Inertial Navigation System for Vehicular Applications ISAAC SKOG Master of Science Thesis Stockholm, Sweden 2005-03-09 IR-SB-EX-0506 1 Abstract In this report an approach for integration
State Estimation for Autopilot Control of Small Unmanned Aerial Vehicles in Windy Conditions
 University of Colorado, Boulder CU Scholar Aerospace Engineering Sciences Graduate Theses & Dissertations Aerospace Engineering Sciences Summer 7-23-2014 State Estimation for Autopilot Control of Small
University of Colorado, Boulder CU Scholar Aerospace Engineering Sciences Graduate Theses & Dissertations Aerospace Engineering Sciences Summer 7-23-2014 State Estimation for Autopilot Control of Small
Calibration of a magnetometer in combination with inertial sensors
 Calibration of a magnetometer in combination with inertial sensors Manon Kok, Jeroen D. Hol, Thomas B. Schön, Fredrik Gustafsson and Henk Luinge Division of Automatic Control Linköping University, Sweden
Calibration of a magnetometer in combination with inertial sensors Manon Kok, Jeroen D. Hol, Thomas B. Schön, Fredrik Gustafsson and Henk Luinge Division of Automatic Control Linköping University, Sweden
Inertial Odometry using AR Drone s IMU and calculating measurement s covariance
 Inertial Odometry using AR Drone s IMU and calculating measurement s covariance Welcome Lab 6 Dr. Ahmad Kamal Nasir 25.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to AR-Drone On-board
Inertial Odometry using AR Drone s IMU and calculating measurement s covariance Welcome Lab 6 Dr. Ahmad Kamal Nasir 25.02.2015 Dr. Ahmad Kamal Nasir 1 Today s Objectives Introduction to AR-Drone On-board
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
5.12 The Aerodynamic Assist Trajectories of Vehicles Propelled by Solar Radiation Pressure References...
 1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
Quadrotor Modeling and Control
 16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
Adaptive Unscented Kalman Filter with Multiple Fading Factors for Pico Satellite Attitude Estimation
 Adaptive Unscented Kalman Filter with Multiple Fading Factors for Pico Satellite Attitude Estimation Halil Ersin Söken and Chingiz Hajiyev Aeronautics and Astronautics Faculty Istanbul Technical University
Adaptive Unscented Kalman Filter with Multiple Fading Factors for Pico Satellite Attitude Estimation Halil Ersin Söken and Chingiz Hajiyev Aeronautics and Astronautics Faculty Istanbul Technical University
Barometer-Aided Road Grade Estimation
 Barometer-Aided Road Grade Estimation Jussi Parviainen, Jani Hautamäki, Jussi Collin and Jarmo Takala Tampere University of Technology, Finland BIOGRAPHY Jussi Parviainen received his M.Sc. degree in May
Barometer-Aided Road Grade Estimation Jussi Parviainen, Jani Hautamäki, Jussi Collin and Jarmo Takala Tampere University of Technology, Finland BIOGRAPHY Jussi Parviainen received his M.Sc. degree in May
An Underwater Vehicle Navigation System Using Acoustic and Inertial Sensors
 Dissertations and Theses 5-2018 An Underwater Vehicle Navigation System Using Acoustic and Inertial Sensors Khalid M. Alzahrani Follow this and additional works at: https://commons.erau.edu/edt Part of
Dissertations and Theses 5-2018 An Underwater Vehicle Navigation System Using Acoustic and Inertial Sensors Khalid M. Alzahrani Follow this and additional works at: https://commons.erau.edu/edt Part of
Attitude Estimation for Augmented Reality with Smartphones
 Attitude Estimation for Augmented Reality with Smartphones Thibaud Michel Pierre Genevès Hassen Fourati Nabil Layaïda Université Grenoble Alpes, INRIA LIG, GIPSA-Lab, CNRS June 13 th, 2017 http://tyrex.inria.fr/mobile/benchmarks-attitude
Attitude Estimation for Augmented Reality with Smartphones Thibaud Michel Pierre Genevès Hassen Fourati Nabil Layaïda Université Grenoble Alpes, INRIA LIG, GIPSA-Lab, CNRS June 13 th, 2017 http://tyrex.inria.fr/mobile/benchmarks-attitude
Czech Technical University in Prague. Faculty of Electrical Engineering Department of control Engineering. Diploma Thesis
 Czech Technical University in Prague Faculty of Electrical Engineering Department of control Engineering Diploma Thesis Performance comparison of Extended and Unscented Kalman Filter implementation in
Czech Technical University in Prague Faculty of Electrical Engineering Department of control Engineering Diploma Thesis Performance comparison of Extended and Unscented Kalman Filter implementation in
Angle estimation using gyros and accelerometers
 Lab in Dynamical systems and control TSRT21 Angle estimation using gyros and accelerometers This version: January 25, 2017 Name: LERTEKNIK REG P-number: Date: AU T O MA R TI C C O N T OL Passed: LINKÖPING
Lab in Dynamical systems and control TSRT21 Angle estimation using gyros and accelerometers This version: January 25, 2017 Name: LERTEKNIK REG P-number: Date: AU T O MA R TI C C O N T OL Passed: LINKÖPING
Calibration of a magnetometer in combination with inertial sensors
 Calibration of a magnetometer in combination with inertial sensors Manon Kok, Linköping University, Sweden Joint work with: Thomas Schön, Uppsala University, Sweden Jeroen Hol, Xsens Technologies, the
Calibration of a magnetometer in combination with inertial sensors Manon Kok, Linköping University, Sweden Joint work with: Thomas Schön, Uppsala University, Sweden Jeroen Hol, Xsens Technologies, the
REFERENCING COORDINATE SYSTEMS MAP PROJECTIONS GEOREFERENCING
 GIS in Ecology SPATIAL REFERENCING COORDINATE SYSTEMS MAP PROJECTIONS GEOREFERENCING : :1 Where on earth? Early mapmakers recognized the need for a system that could locate features on the earth's surface.
GIS in Ecology SPATIAL REFERENCING COORDINATE SYSTEMS MAP PROJECTIONS GEOREFERENCING : :1 Where on earth? Early mapmakers recognized the need for a system that could locate features on the earth's surface.
Tracking for VR and AR
 Tracking for VR and AR Hakan Bilen November 17, 2017 Computer Graphics University of Edinburgh Slide credits: Gordon Wetzstein and Steven M. La Valle 1 Overview VR and AR Inertial Sensors Gyroscopes Accelerometers
Tracking for VR and AR Hakan Bilen November 17, 2017 Computer Graphics University of Edinburgh Slide credits: Gordon Wetzstein and Steven M. La Valle 1 Overview VR and AR Inertial Sensors Gyroscopes Accelerometers
Lecture Module 2: Spherical Geometry, Various Axes Systems
 1 Lecture Module 2: Spherical Geometry, Various Axes Systems Satellites in space need inertial frame of reference for attitude determination. In a true sense, all bodies in universe are in motion and inertial
1 Lecture Module 2: Spherical Geometry, Various Axes Systems Satellites in space need inertial frame of reference for attitude determination. In a true sense, all bodies in universe are in motion and inertial
Locating and supervising relief forces in buildings without the use of infrastructure
 Locating and supervising relief forces in buildings without the use of infrastructure Tracking of position with low-cost inertial sensors Martin Trächtler 17.10.2014 18th Leibniz Conference of advanced
Locating and supervising relief forces in buildings without the use of infrastructure Tracking of position with low-cost inertial sensors Martin Trächtler 17.10.2014 18th Leibniz Conference of advanced
Adaptive Estimation of Measurement Bias in Six Degree of Freedom Inertial Measurement Units: Theory and Preliminary Simulation Evaluation
 Adaptive Estimation of Measurement Bias in Six Degree of Freedom Inertial Measurement Units: Theory and Preliminary Simulation Evaluation Andrew R. Spielvogel and Louis L. Whitcomb Abstract Six-degree
Adaptive Estimation of Measurement Bias in Six Degree of Freedom Inertial Measurement Units: Theory and Preliminary Simulation Evaluation Andrew R. Spielvogel and Louis L. Whitcomb Abstract Six-degree
Estimation and Control of a Quadrotor Attitude
 Estimation and Control of a Quadrotor Attitude Bernardo Sousa Machado Henriques Mechanical Engineering Department, Instituto Superior Técnico, Lisboa, Portugal E-mail: henriquesbernardo@gmail.com Abstract
Estimation and Control of a Quadrotor Attitude Bernardo Sousa Machado Henriques Mechanical Engineering Department, Instituto Superior Técnico, Lisboa, Portugal E-mail: henriquesbernardo@gmail.com Abstract
Application of Data Fusion to Aerial Robotics. Paul Riseborough March 24, 2015
 Application of Data Fusion to Aerial Robotics Paul Riseborough March 24, 2015 Outline Introduction to APM project What is data fusion and why do we use it? Where is data fusion used in APM? Development
Application of Data Fusion to Aerial Robotics Paul Riseborough March 24, 2015 Outline Introduction to APM project What is data fusion and why do we use it? Where is data fusion used in APM? Development
Map Projections. Displaying the earth on 2 dimensional maps
 Map Projections Displaying the earth on 2 dimensional maps Map projections Define the spatial relationship between locations on earth and their relative locations on a flat map Are mathematical expressions
Map Projections Displaying the earth on 2 dimensional maps Map projections Define the spatial relationship between locations on earth and their relative locations on a flat map Are mathematical expressions
Lecture 9: Modeling and motion models
 Sensor Fusion, 2014 Lecture 9: 1 Lecture 9: Modeling and motion models Whiteboard: Principles and some examples. Slides: Sampling formulas. Noise models. Standard motion models. Position as integrated
Sensor Fusion, 2014 Lecture 9: 1 Lecture 9: Modeling and motion models Whiteboard: Principles and some examples. Slides: Sampling formulas. Noise models. Standard motion models. Position as integrated
GEOGRAPHIC COORDINATE SYSTEMS
 GEOGRAPHIC COORDINATE SYSTEMS Introduction to GIS Winter 2015 What is Georeferencing? Used to establish a location on the Earth s surface 1 st order polynomial transformation Georeferencing toolbar What
GEOGRAPHIC COORDINATE SYSTEMS Introduction to GIS Winter 2015 What is Georeferencing? Used to establish a location on the Earth s surface 1 st order polynomial transformation Georeferencing toolbar What
Natural Signals for Navigation: Position and Orientation from the Local Magnetic Field, Sun Vector and the Gravity Vector
 Natural Signals for Navigation: Position and Orientation from the Local Magnetic Field, Sun Vector and the Gravity Vector Kartik B. Ariyur Isabelle A. G. Laureyns John Barnes Gautam Sharma School of Mechanical
Natural Signals for Navigation: Position and Orientation from the Local Magnetic Field, Sun Vector and the Gravity Vector Kartik B. Ariyur Isabelle A. G. Laureyns John Barnes Gautam Sharma School of Mechanical
+ 35º 53ʹ 16ʺ 84º 09ʹ 35ʺ
 + 35º 53ʹ 16ʺ 84º 09ʹ 35ʺ 35º 53ʹ 16ʺ N 84º 09ʹ 35ʺ W (the precise location of Farragut High School!) Spherical Coordinates Mapping a Sphere The student will be able to: HW: 1 Utilize and convert SI units
+ 35º 53ʹ 16ʺ 84º 09ʹ 35ʺ 35º 53ʹ 16ʺ N 84º 09ʹ 35ʺ W (the precise location of Farragut High School!) Spherical Coordinates Mapping a Sphere The student will be able to: HW: 1 Utilize and convert SI units
Latitude and Longitude. Finding your location throughout the world!
 Latitude and Longitude Finding your location throughout the world! What is Latitude? Latitude is defined as a measurement of distance in degrees north and south of the equator The word latitude is derived
Latitude and Longitude Finding your location throughout the world! What is Latitude? Latitude is defined as a measurement of distance in degrees north and south of the equator The word latitude is derived
An Adaptive Filter for a Small Attitude and Heading Reference System Using Low Cost Sensors
 An Adaptive Filter for a Small Attitude and eading Reference System Using Low Cost Sensors Tongyue Gao *, Chuntao Shen, Zhenbang Gong, Jinjun Rao, and Jun Luo Department of Precision Mechanical Engineering
An Adaptive Filter for a Small Attitude and eading Reference System Using Low Cost Sensors Tongyue Gao *, Chuntao Shen, Zhenbang Gong, Jinjun Rao, and Jun Luo Department of Precision Mechanical Engineering
MEAM 510 Fall 2012 Bruce D. Kothmann
 Balancing g Robot Control MEAM 510 Fall 2012 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Balancing g Robot Control MEAM 510 Fall 2012 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 5, JUNE
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 53, NO 5, JUNE 2008 1203 Nonlinear Complementary Filters on the Special Orthogonal Group Robert Mahony, Senior Member, IEEE, Tarek Hamel, Member, IEEE, and Jean-Michel
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 53, NO 5, JUNE 2008 1203 Nonlinear Complementary Filters on the Special Orthogonal Group Robert Mahony, Senior Member, IEEE, Tarek Hamel, Member, IEEE, and Jean-Michel
MEAM 510 Fall 2011 Bruce D. Kothmann
 Balancing g Robot Control MEAM 510 Fall 2011 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Balancing g Robot Control MEAM 510 Fall 2011 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Attitude Determination and. Attitude Control
 Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
WHERE ARE YOU? Maps & Geospatial Concepts Fall 2012
 WHERE ARE YOU? Maps & Geospatial Concepts Fall 2012 Where are you? Relative location I m at school Absolute Location 45 26 18.07 122 43 50.78 Datums Datums A reference surface of the Earth Used as the
WHERE ARE YOU? Maps & Geospatial Concepts Fall 2012 Where are you? Relative location I m at school Absolute Location 45 26 18.07 122 43 50.78 Datums Datums A reference surface of the Earth Used as the
Presenter: Siu Ho (4 th year, Doctor of Engineering) Other authors: Dr Andy Kerr, Dr Avril Thomson
 Other authors: Dr Andy Kerr, Dr Avril Thomson") The development and evaluation of a sensor-fusion and adaptive algorithm for detecting real-time upper-trunk kinematics, phases and timing of the sit-to-stand movements in stroke survivors Presenter: Siu
The development and evaluation of a sensor-fusion and adaptive algorithm for detecting real-time upper-trunk kinematics, phases and timing of the sit-to-stand movements in stroke survivors Presenter: Siu
ASTRONOMICAL NAVIGATION
 Basic terms ASTRONOMICAL NAVIGATION *astronomical navigation *compilation *astronomical tabels *celestial observations *solution of a sight * Sun/Moon/star sight *spherical trigonometry *PZX triangle *celestial
Basic terms ASTRONOMICAL NAVIGATION *astronomical navigation *compilation *astronomical tabels *celestial observations *solution of a sight * Sun/Moon/star sight *spherical trigonometry *PZX triangle *celestial
1 Introduction. Position Estimation 4: 1.1 History
 1.1History 1 Introduction 1.1 History 1 Inertial Navigation Systems Name comes from use of inertial principles (Newton s Laws). Historical roots in German Peenemunde Group. Modern form credited to Charles
1.1History 1 Introduction 1.1 History 1 Inertial Navigation Systems Name comes from use of inertial principles (Newton s Laws). Historical roots in German Peenemunde Group. Modern form credited to Charles
Attitude determination method using single-antenna GPS, Gyro and Magnetometer
 212 Asia-Pacific International Symposium on Aerospace echnology Nov. 13-1, Jeju, Korea Attitude determination method using single-antenna GPS, Gyro and Magnetometer eekwon No 1, Am Cho 2, Youngmin an 3,
212 Asia-Pacific International Symposium on Aerospace echnology Nov. 13-1, Jeju, Korea Attitude determination method using single-antenna GPS, Gyro and Magnetometer eekwon No 1, Am Cho 2, Youngmin an 3,
Geostationary Satellites and Astrophotography
 Geostationary Satellites and Astrophotography By Clay S. Turner 11/14/08 Introduction When I first started doing astrophotography last January, it was only natural to take pictures of some of Orion s deep
Geostationary Satellites and Astrophotography By Clay S. Turner 11/14/08 Introduction When I first started doing astrophotography last January, it was only natural to take pictures of some of Orion s deep
IMU Filter. Michael Asher Emmanuel Malikides November 5, 2011
 IMU Filter Michael Asher Emmanuel Malikides November 5, 2011 Abstract Despite the ubiquitousness of GPS devices, on board inertial navigation remains important. An IMU like the Sparkfun Ultimate IMU used,
IMU Filter Michael Asher Emmanuel Malikides November 5, 2011 Abstract Despite the ubiquitousness of GPS devices, on board inertial navigation remains important. An IMU like the Sparkfun Ultimate IMU used,
MAE 142 Homework #5 Due Friday, March 13, 2009
 MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
ME 476 Solar Energy UNIT THREE SOLAR RADIATION
 ME 476 Solar Energy UNIT THREE SOLAR RADIATION Unit Outline 2 What is the sun? Radiation from the sun Factors affecting solar radiation Atmospheric effects Solar radiation intensity Air mass Seasonal variations
ME 476 Solar Energy UNIT THREE SOLAR RADIATION Unit Outline 2 What is the sun? Radiation from the sun Factors affecting solar radiation Atmospheric effects Solar radiation intensity Air mass Seasonal variations
AIAA THE ACCURACY OF THE GPS-DERIVED ACCELERATION VECTOR, A NOVEL ATTITUDE REFERENCE
 AIAA-99-479 THE ACCURACY OF THE GPS-DERIVED ACCELERATION VECTOR, A NOVEL ATTITUDE REFERENCE by Mark L. Psiaki *, Steven P. Powell #, and Paul M. Kintner, Jr. ** Cornell University, Ithaca, N.Y. 14853-751
AIAA-99-479 THE ACCURACY OF THE GPS-DERIVED ACCELERATION VECTOR, A NOVEL ATTITUDE REFERENCE by Mark L. Psiaki *, Steven P. Powell #, and Paul M. Kintner, Jr. ** Cornell University, Ithaca, N.Y. 14853-751
Pseudo-Measurements as Aiding to INS during GPS. Outages
 Pseudo-Measurements as Aiding to INS during GPS Outages Itzik Klein 1, Sagi Filin 2, Tomer Toledo 3 Faculty of Civil Engineering Technion Israel Institute of Technology, Haifa 32000, Israel Published in
Pseudo-Measurements as Aiding to INS during GPS Outages Itzik Klein 1, Sagi Filin 2, Tomer Toledo 3 Faculty of Civil Engineering Technion Israel Institute of Technology, Haifa 32000, Israel Published in
Guide to Polar Alignment of a Meade LX200GPS Telescope
 Guide to Polar Alignment of a Meade By Dale A. Chamberlain dale@dchamberlain.net April 18, 2006 Page 1 of 11 1 Why Polar Align? After making an investment in a telescope such as the Meade LX200GPS, you
Guide to Polar Alignment of a Meade By Dale A. Chamberlain dale@dchamberlain.net April 18, 2006 Page 1 of 11 1 Why Polar Align? After making an investment in a telescope such as the Meade LX200GPS, you
12/26/2012. Geographic Information Systems * * * * GIS (... yrezaei
 ( - Geographic Information Systems ( ( 1 2 3 Information System Data base DB IS IS DB (Knowledge ( ( (System (Information System - (Georefrence Analysis Data + Knowledge ======== Information 4 5 ( < 10%
( - Geographic Information Systems ( ( 1 2 3 Information System Data base DB IS IS DB (Knowledge ( ( (System (Information System - (Georefrence Analysis Data + Knowledge ======== Information 4 5 ( < 10%
Attitude Estimation for Indoor Navigation and Augmented Reality with Smartphones
 Attitude Estimation for Indoor Navigation and Augmented Reality with Smartphones Thibaud Michel, Pierre Genevès, Hassen Fourati, Nabil Layaïda To cite this version: Thibaud Michel, Pierre Genevès, Hassen
Attitude Estimation for Indoor Navigation and Augmented Reality with Smartphones Thibaud Michel, Pierre Genevès, Hassen Fourati, Nabil Layaïda To cite this version: Thibaud Michel, Pierre Genevès, Hassen
Distance Determination between the MINOS Detectors for TOF Measurements. Dr. Virgil Bocean Alignment & Metrology Department Fermilab
 Distance Determination between the MINOS Detectors for TOF Measurements Dr. Virgil Bocean Alignment & Metrology Department Fermilab 1 1 Introduction Part of the neutrino research program at Fermilab is
Distance Determination between the MINOS Detectors for TOF Measurements Dr. Virgil Bocean Alignment & Metrology Department Fermilab 1 1 Introduction Part of the neutrino research program at Fermilab is
Latitude and Longitude
 Latitude and Longitude Finding Your Location on a Sphere Coordinate Systems n When you are locating a point on a flat surface you can use Cartesian coordinates of x and y. n The point 2, 3 is plotted on
Latitude and Longitude Finding Your Location on a Sphere Coordinate Systems n When you are locating a point on a flat surface you can use Cartesian coordinates of x and y. n The point 2, 3 is plotted on
Chapter 3 Models of the Earth. 3.1 Finding Locations on the Earth. 3.1 Objectives
 Chapter 3 Models of the Earth 3.1 Finding Locations on the Earth 3.1 Objectives Explain latitude and longitude. How can latitude and longitude be used to find locations on Earth? How can a magnetic compass
Chapter 3 Models of the Earth 3.1 Finding Locations on the Earth 3.1 Objectives Explain latitude and longitude. How can latitude and longitude be used to find locations on Earth? How can a magnetic compass
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
Acquiring Accurate State Estimates For Use In Autonomous Flight. Erik Bærentsen
 University of Copenhagen Niels Bohr Institute Acquiring Accurate State Estimates For Use In Autonomous Flight Erik Bærentsen Supervisor: Troels C. Petersen A thesis submitted in fulfillment of the requirements
University of Copenhagen Niels Bohr Institute Acquiring Accurate State Estimates For Use In Autonomous Flight Erik Bærentsen Supervisor: Troels C. Petersen A thesis submitted in fulfillment of the requirements
Chapter 1 Lecture 2. Introduction 2. Topics. Chapter-1
 Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
Fuzzy Adaptive Kalman Filtering for INS/GPS Data Fusion
 A99936769 AMA-99-4307 Fuzzy Adaptive Kalman Filtering for INS/GPS Data Fusion J.Z. Sasiadek* and Q. Wang** Dept. of Mechanical & Aerospace Engineering Carleton University 1125 Colonel By Drive, Ottawa,
A99936769 AMA-99-4307 Fuzzy Adaptive Kalman Filtering for INS/GPS Data Fusion J.Z. Sasiadek* and Q. Wang** Dept. of Mechanical & Aerospace Engineering Carleton University 1125 Colonel By Drive, Ottawa,
Research Article Error Modeling, Calibration, and Nonlinear Interpolation Compensation Method of Ring Laser Gyroscope Inertial Navigation System
 Abstract and Applied Analysis Volume 213, Article ID 359675, 7 pages http://dx.doi.org/1.1155/213/359675 Research Article Error Modeling, Calibration, and Nonlinear Interpolation Compensation Method of
Abstract and Applied Analysis Volume 213, Article ID 359675, 7 pages http://dx.doi.org/1.1155/213/359675 Research Article Error Modeling, Calibration, and Nonlinear Interpolation Compensation Method of
Gravity Probe B Data Analysis Challenges, Insights, and Results
 Gravity Probe B Data Analysis Challenges, Insights, and Results Mac Keiser April 15, 27 April 15, 27 Jacksonville, FL 1 Topics Data Analysis Strategy and Methods Challenges and Insights Trapped Magnetic
Gravity Probe B Data Analysis Challenges, Insights, and Results Mac Keiser April 15, 27 April 15, 27 Jacksonville, FL 1 Topics Data Analysis Strategy and Methods Challenges and Insights Trapped Magnetic
Applications Linear Control Design Techniques in Aircraft Control I
 Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
Inertial Navigation and Various Applications of Inertial Data. Yongcai Wang. 9 November 2016
 Inertial Navigation and Various Applications of Inertial Data Yongcai Wang 9 November 2016 Types of Gyroscope Mechanical Gyroscope Laser Gyroscope Sagnac Effect Stable Platform IMU and Strapdown IMU In
Inertial Navigation and Various Applications of Inertial Data Yongcai Wang 9 November 2016 Types of Gyroscope Mechanical Gyroscope Laser Gyroscope Sagnac Effect Stable Platform IMU and Strapdown IMU In
CHAPTER 2 SKILL SHEET 2: CELESTIAL NAVIGATION
 CHAPTER 2 SKILL SHEET 2: CELESTIAL NAVIGATION Before the invention of GPS technology, how were people on ships far at sea, out of the sight of land, able to tell where they were? For thousands of years
CHAPTER 2 SKILL SHEET 2: CELESTIAL NAVIGATION Before the invention of GPS technology, how were people on ships far at sea, out of the sight of land, able to tell where they were? For thousands of years
Earth-Centered, Earth-Fixed Coordinate System
 Fundamentals of Global Positioning System Receivers: A Software Approach James Bao-Yen Tsui Copyright 2000 John Wiley & Sons, Inc. Print ISBN 0-471-38154-3 Electronic ISBN 0-471-20054-9 CHAPTER FOUR Earth-Centered,
Fundamentals of Global Positioning System Receivers: A Software Approach James Bao-Yen Tsui Copyright 2000 John Wiley & Sons, Inc. Print ISBN 0-471-38154-3 Electronic ISBN 0-471-20054-9 CHAPTER FOUR Earth-Centered,
Effective Use of Magnetometer Feedback for Smart Projectile Applications
 Effective Use of Magnetometer Feedback for Smart Projectile Applications JONATHAN ROGERS and MARK COSTELLO Georgia Institute of Technology, Atlanta, GA, 30332 THOMAS HARKINS US Army Research Laboratory,
Effective Use of Magnetometer Feedback for Smart Projectile Applications JONATHAN ROGERS and MARK COSTELLO Georgia Institute of Technology, Atlanta, GA, 30332 THOMAS HARKINS US Army Research Laboratory,
GERMAN TYPE EQUATORIAL MOUNT (FM 51/52 - FM 100/102 - FM150) USER MANUAL
 USER MANUAL") GERMAN TYPE EQUATORIAL MOUNT (FM 51/52 - FM 100/102 - FM150) USER MANUAL NOMENCLATURE MANUAL KNOB WORM DRIVE TIGHTENING SCREW FIXING CLUTCH CONTROL PLUG POLAR SCOPE PEEP HOLE PLATFORM ALTITUDE MOUNTING
GERMAN TYPE EQUATORIAL MOUNT (FM 51/52 - FM 100/102 - FM150) USER MANUAL NOMENCLATURE MANUAL KNOB WORM DRIVE TIGHTENING SCREW FIXING CLUTCH CONTROL PLUG POLAR SCOPE PEEP HOLE PLATFORM ALTITUDE MOUNTING
Evaluation of different wind estimation methods in flight tests with a fixed-wing UAV
 Evaluation of different wind estimation methods in flight tests with a fixed-wing UAV Julian Sören Lorenz February 5, 2018 Contents 1 Glossary 2 2 Introduction 3 3 Tested algorithms 3 3.1 Unfiltered Method
Evaluation of different wind estimation methods in flight tests with a fixed-wing UAV Julian Sören Lorenz February 5, 2018 Contents 1 Glossary 2 2 Introduction 3 3 Tested algorithms 3 3.1 Unfiltered Method
Integration of a strapdown gravimeter system in an Autonomous Underwater Vehicle
 Integration of a strapdown gravimeter system in an Autonomous Underwater Vehicle Clément ROUSSEL PhD - Student (L2G - Le Mans - FRANCE) April 17, 2015 Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015
Integration of a strapdown gravimeter system in an Autonomous Underwater Vehicle Clément ROUSSEL PhD - Student (L2G - Le Mans - FRANCE) April 17, 2015 Clément ROUSSEL ISPRS / CIPA Workshop April 17, 2015
UAVBook Supplement Full State Direct and Indirect EKF
 UAVBook Supplement Full State Direct and Indirect EKF Randal W. Beard March 14, 217 This supplement will explore alternatives to the state estimation scheme presented in the book. In particular, we will
UAVBook Supplement Full State Direct and Indirect EKF Randal W. Beard March 14, 217 This supplement will explore alternatives to the state estimation scheme presented in the book. In particular, we will
State Estimation with a Kalman Filter
 State Estimation with a Kalman Filter When I drive into a tunnel, my GPS continues to show me moving forward, even though it isn t getting any new position sensing data How does it work? A Kalman filter
State Estimation with a Kalman Filter When I drive into a tunnel, my GPS continues to show me moving forward, even though it isn t getting any new position sensing data How does it work? A Kalman filter
A Close Examination of Multiple Model Adaptive Estimation Vs Extended Kalman Filter for Precision Attitude Determination
 A Close Examination of Multiple Model Adaptive Estimation Vs Extended Kalman Filter for Precision Attitude Determination Quang M. Lam LexerdTek Corporation Clifton, VA 4 John L. Crassidis University at
A Close Examination of Multiple Model Adaptive Estimation Vs Extended Kalman Filter for Precision Attitude Determination Quang M. Lam LexerdTek Corporation Clifton, VA 4 John L. Crassidis University at
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING
 FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
Module 2: Mapping Topic 2 Content: Determining Latitude and Longitude Notes
 Introduction In order to more easily locate points on a globe or map, cartographers designed a system of imaginary vertical lines (also called parallels) and horizontal lines (also called meridians) that
Introduction In order to more easily locate points on a globe or map, cartographers designed a system of imaginary vertical lines (also called parallels) and horizontal lines (also called meridians) that
CHAPTER 20 SIGHT REDUCTION
 CHAPTER 20 SIGHT REDUCTION BASIC PRINCIPLES 2000. Introduction Reducing a celestial sight to obtain a line of position consists of six steps: 1. Correcting sextant altitude (hs) to obtain observed altitude
CHAPTER 20 SIGHT REDUCTION BASIC PRINCIPLES 2000. Introduction Reducing a celestial sight to obtain a line of position consists of six steps: 1. Correcting sextant altitude (hs) to obtain observed altitude