Dead Reckoning navigation (DR navigation)
|
|
|
- Irene Maxwell
- 5 years ago
- Views:
Transcription




1 Dead Reckoning navigation (DR navigation) Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai
2 A Navigation which uses a Inertial sensor (motion & rotational sensor) (or) air data sensor (or) Doppler radar to continuously calculate position, orientation and velocity of a moving object without need of any external references is said to be Dead reckoning Navigation (DR). Types of DR Navigation Type By using Inertial Measurement unit By using Doppler Data measurement. By using Air data Measurement Two important parameters are needed to perform DR Navigation Initial Position of Latitude and Longitude Northerly and Easterly velocity components of an aircraft, V N and V E.
3 The rate of change of latitude. VN R The rate of change of longitude. VE Rcos VE sec R
4 The change of latitude over time with initial latitude ( 0) is given by 0 1 t N R 0 V dt The change of longitude over time with initial long itude ( 0) is given by 0 1 t E R 0 V sec dt It can be noticed that a mathematical sin gularity approaches 90degree and Secapproaches infinity. This method of Computing latitude and longitude of DR position is lim ited to latitude below 80deg ree. So a different method is needed to deal with high latitudes.
5 Some of the method to over singularity problems are A spherical coordinate system with the poles removed to some other regions. A Unipolar system Directional Cosines The spherical coordinate system with transferred poles gives additional complication to ellipsoidal correction because of earth is an ellipse. Singularity also still exits in spherical coordinate system. Space does not permits for Unipolar system because of its length. Direction cosine system is a system in which a coordinate of a point is represent by three directional cosine of its radius vector w.r.t to ECEF reference frame.
6 Dead Reckoning by IMU Dead Reckoning by IMU is classified into two types Stable platform system. Strap down system. Three important corrections to be done in gyroscope the case of DR by IMU Schuler's Corrections Angular Rate Corrections Angular Rate corrections due to earth rotation. Vehicle Rate correction due to aircraft flies over surface of the Earth. Acceleration Correction terms Coriolis acceleration Centrifugal acceleration Gravitational acceleration


7 Stable platform
8 Strap down platform
9 Angular Rate corrections due to earth rotation. The earth angular velocity can be resolved into two components Component about north pointing axis cos This correction must be applied to the vertical gyroscope to precess it about the north pointing axis. Component about Local Vertical axis sin This correction must be applied to the Azimuth gyroscope to maintain the platform facing north. *****It is noted that,there is zero component of the earth angular velocity about the East pointing axis and this forms the basics of Gyro compassing alignment Technique.
10 Schuler's Oscillations
11 Earth s rotation rate components Vehicle rates
12 Vehicle Rate corrections due to aircraft flies over the surface of earth. The local vertical rotates in space as the aircraft flies over the surface of the earth because the earth is spherical. The angular rate of rotation of the local vertical with respect to the inertial axis are V N / R about the East pointing axis V E / R about the North pointing axis The angular rates are referred as vehicle rate. In order to maintain the platform local level, it is necessary to correct vertical gyro about its east pointing and north point axes at an angular rate of V N / R and V E / R respectively.
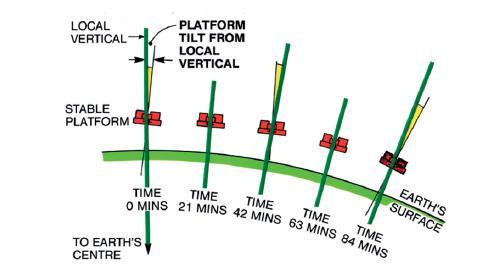
13 These types of errors propagation are unacceptable except in application where the time of flight is short (short range missile) or system could be frequently corrected by another navigation system(gps). In order to avoid the tilt error the torque motor s gives correction to the INS, so that the INS follows the local vertical irrespective of the vehicle acceleration so that it behave like a Schuler s pendulum. Schuler s pendulum is proposed by Austrian Physicist Max Schuler s in He proposed a idea of a new pendulum whose length was equal to the radius of the earth is unaffected by acceleration. The plump bob of such pendulum would always be at the centre and would defines the local vertical irrespective of motion,or acceleration of the point of suspension of pendulum (moving vehicle).
14 Any disturbance to the pendulum bob would causes it oscillate about the local vertical with a period equal to L T Seconds 84.4minutes g 9.81 A simple pendulum of length equal to the earth radius is not feasible. however a pendulous system could be produced with an exact time period of 84.4 minutes would indicate the local vertical irrespective of the acceleration of vehicle carrying it. In 1924 the system is not available to implement in practical because of the un available of computing technology. The first successful airborne demonstration of a Schuler tuned inertial navigation was achieved by Dr.Charles Strak Draper and his team in Massachusetts Institute of Technology in 1952.
15
16 The X and Y accelerometers are mounted on a stable platform, so that X accelerometer measures aircraft acceleration along East-West axis Y accelerometer measures acceleration along the North-South axis The output of X and Y accelerometer after corrected for the Coriolis and centrifugal acceleration component, are then integrated with respect to time to gives the easterly and northerly velocity component of the aircraft. From the velocity we can able to find the latitude and longitude of the vehicle. A Schuler tuning is achieved by feedback the accelerometer derived vehicle rates VN/R and VE/R to the vertical gyro so the platform follows the local vertical as the aircraft moves over the spherical earth.
17 There is a vehicle rate correction (V E / R ) tan,about local vertical (down vertical) which must be applied to the azimuth gyro in order to maintain the north reference. The (V E / R ) tan term is derived by resolving the vehicle rate component about earth polar axis about, through the latitude angle. VE *sin Rcos V R E tan VE It can be noted that the tan increases rapidly at high altitudes R and become infinite at the poles 90
18 Acceleration Correction terms The NED frame is rotating with respect to an inertial frame and this introduces further complication in deriving the aircraft rate of change of velocity along the north east axes. Aircraft linear motion in a rotational axis frame introduces a acceleration name as Coriolis acceleration. Coriolis acceleration introduced by French mathematician who formulated the general principle who formulated the study of moving bodies in a rotational frame. Coriolis acceleration experienced by a moving body with a velocity V with respect to an axis frame which is rotating at an angular rate w is equal to 2VW and is mutually right angle to linear velocity and angular velocity vector.
19 Coriolis accelerations due to Earth s rotation North axis 2 VE sin East axis = 2 VN sin 2 VD cos Vertical axis 2 VE cos
20 Centrifugal acceleration The aircraft is also turning in space as it flies over the surface of earth, because of the earth spherical in nature, it introduces a centrifugal acceleration. The centrifugal acceleration component along North, East and Down axes are. North axis East axis Vertical axis = V tan V V E D N V V V 2 2 N E R tan V V N E D E V R R
21 Gravitational Acceleration The Down axis (or vertical) axis accelerometer measures the gravitational acceleration of the aircraft, so it is necessary to correct the output for the gravity acceleration g. The gravity acceleration reduces as the altitude increases and follows an inverse square law. The value of g at an altitude, H is given by g R 0 R 2 0 H 2. g 0 g0 is the gravitational acceleration at the earth surface The local value of the gravitational acceleration g0 varies by a small amount with latitude. This is because of centrifugal acceleration created by earth rate rotation.
22 g 2 1k sin gequ e sin gequ m / s k e
23 Dead Reckoning navigation by using Doppler/Heading Reference system
24 Doppler/heading Reference DR Navigation System The ground speed VG and drift angle are measure by doppler radar velocity sensor system d directly The heading angle measured directly from AHRS
25 The primary function of a Doppler radar is to continuously determine the velocity vector of an aircraft with respect to the ground. The measured velocity vector is first subjected to suitable coordinate frame and then to find the velocity vector components about north east and down components. The velocity vector is determined by measuring the Doppler shift of microwave signal transmitted from an aircraft at an angle steep angles, backscattered by a surface and received by a Doppler radar receiver. The track angle (heading) of an aircraft has been obtained from Inertial Measurement unit.
26 The track angle can be obtained from The northerly velocity component of aircraft VN and easterly velocity component VEare driven by resolution of Ground speed VG V V N E V V G G cos sin
27 Dead Reckoning navigation using Air data system


28

29
30 The Horizontal velocity component VHof the true airspeed VTis obtained by resolving VT through the aircraft pitch angle VH VTcos The northerly and easterly velocity component of the airspeed are then derived by resolving V of the true airspeed V is obtained by resolving V through the aircraft pitch angle H T T Northerly Airspeed V Easterly Airspeed V H H cos sin
31 The forecast ( or) estimated wind speed VM and direction Wis resolved into northerly and easterly components Northerly Wind component V Easterly Wind component V W W cos sin The northerly and easterly velocity component of the aircraft are W W V V cos V cos N H W W V V sin V sin E H W W
32 Thank you
Fundamentals of attitude Estimation
 Fundamentals of attitude Estimation Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Basically an IMU can used for two
Fundamentals of attitude Estimation Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Basically an IMU can used for two
EE565:Mobile Robotics Lecture 6
 EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
VN-100 Velocity Compensation
 VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
VN-100 Velocity Compensation Velocity / Airspeed Aiding for AHRS Applications Application Note Abstract This application note describes how the VN-100 can be used in non-stationary applications which require
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
1 Introduction. Position Estimation 4: 1.1 History
 1.1History 1 Introduction 1.1 History 1 Inertial Navigation Systems Name comes from use of inertial principles (Newton s Laws). Historical roots in German Peenemunde Group. Modern form credited to Charles
1.1History 1 Introduction 1.1 History 1 Inertial Navigation Systems Name comes from use of inertial principles (Newton s Laws). Historical roots in German Peenemunde Group. Modern form credited to Charles
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
Autonomous Mobile Robot Design Topic: Inertial Measurement Unit Dr. Kostas Alexis (CSE) Where am I? What is my environment? Robots use multiple sensors to understand where they are and how their environment
LONGITUDE AND LATITUDE. Semi great circles joining the true or geographic poles of the earth (true meridians).
.") MERIDIANS OF LONGITUDE LONGITUDE AND LATITUDE Semi great circles joining the true or geographic poles of the earth (true meridians). They are measured from 0 to 180 degrees East and West of the PRIME MERIDIAN,
MERIDIANS OF LONGITUDE LONGITUDE AND LATITUDE Semi great circles joining the true or geographic poles of the earth (true meridians). They are measured from 0 to 180 degrees East and West of the PRIME MERIDIAN,
Fundamentals of High Accuracy Inertial Navigation Averil B. Chatfield Table of Contents
 Navtech Part #2440 Preface Fundamentals of High Accuracy Inertial Navigation Averil B. Chatfield Table of Contents Chapter 1. Introduction...... 1 I. Forces Producing Motion.... 1 A. Gravitation......
Navtech Part #2440 Preface Fundamentals of High Accuracy Inertial Navigation Averil B. Chatfield Table of Contents Chapter 1. Introduction...... 1 I. Forces Producing Motion.... 1 A. Gravitation......
EE 570: Location and Navigation
 EE 570: Location and Navigation Navigation Mathematics: Coordinate Frames Kevin Wedeward Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen
EE 570: Location and Navigation Navigation Mathematics: Coordinate Frames Kevin Wedeward Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration with Stephen
NAWCWPNS TM 8128 CONTENTS. Introduction Two-Dimensinal Motion Three-Dimensional Motion Nonrotating Spherical Earth...
 CONTENTS Introduction... 3 Two-Dimensinal Motion... 3 Three-Dimensional Motion... 5 Nonrotating Spherical Earth...10 Rotating Spherical Earth...12 WGS84...14 Conclusion...14 Appendixes: A. Kalman Filter...15
CONTENTS Introduction... 3 Two-Dimensinal Motion... 3 Three-Dimensional Motion... 5 Nonrotating Spherical Earth...10 Rotating Spherical Earth...12 WGS84...14 Conclusion...14 Appendixes: A. Kalman Filter...15
Chapter 1 Lecture 2. Introduction 2. Topics. Chapter-1
 Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
Chapter 1 Lecture 2 Introduction 2 Topics 1.4 Equilibrium of airplane 1.5 Number of equations of motion for airplane in flight 1.5.1 Degrees of freedom 1.5.2 Degrees of freedom for a rigid airplane 1.6
Distance Determination between the MINOS Detectors for TOF Measurements. Dr. Virgil Bocean Alignment & Metrology Department Fermilab
 Distance Determination between the MINOS Detectors for TOF Measurements Dr. Virgil Bocean Alignment & Metrology Department Fermilab 1 1 Introduction Part of the neutrino research program at Fermilab is
Distance Determination between the MINOS Detectors for TOF Measurements Dr. Virgil Bocean Alignment & Metrology Department Fermilab 1 1 Introduction Part of the neutrino research program at Fermilab is
Localizer Hold Autopilot
 Localizer Hold Autopilot Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Localizer hold autopilot is one of the important
Localizer Hold Autopilot Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Localizer hold autopilot is one of the important
UAV Navigation: Airborne Inertial SLAM
 Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
Introduction UAV Navigation: Airborne Inertial SLAM Jonghyuk Kim Faculty of Engineering and Information Technology Australian National University, Australia Salah Sukkarieh ARC Centre of Excellence in
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
PHYS 211 Lecture 12 - The Earth's rotation 12-1
 PHY 211 Lecture 12 - The Earth's rotation 12-1 Lecture 12 - The Earth s rotation Text: Fowles and Cassiday, Chap. 5 Demo: basketball for the earth, cube for Cartesian frame A coordinate system sitting
PHY 211 Lecture 12 - The Earth's rotation 12-1 Lecture 12 - The Earth s rotation Text: Fowles and Cassiday, Chap. 5 Demo: basketball for the earth, cube for Cartesian frame A coordinate system sitting
557. Radial correction controllers of gyroscopic stabilizer
 557. Radial correction controllers of gyroscopic stabilizer M. Sivčák 1, J. Škoda, Technical University in Liberec, Studentská, Liberec, Czech Republic e-mail: 1 michal.sivcak@tul.cz; jan.skoda@pevnosti.cz
557. Radial correction controllers of gyroscopic stabilizer M. Sivčák 1, J. Škoda, Technical University in Liberec, Studentská, Liberec, Czech Republic e-mail: 1 michal.sivcak@tul.cz; jan.skoda@pevnosti.cz
Chapter 11 Angular Momentum; General Rotation. Copyright 2009 Pearson Education, Inc.
 Chapter 11 Angular Momentum; General Rotation ! L = I!! Units of Chapter 11 Angular Momentum Objects Rotating About a Fixed Axis Vector Cross Product; Torque as a Vector Angular Momentum of a Particle
Chapter 11 Angular Momentum; General Rotation ! L = I!! Units of Chapter 11 Angular Momentum Objects Rotating About a Fixed Axis Vector Cross Product; Torque as a Vector Angular Momentum of a Particle
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Navigation Sensors Dr. Kostas Alexis (CSE) Navigation Sensors Providing the capacity to estimate the state of the aerial robot Self-Localize and estimate
CS491/691: Introduction to Aerial Robotics Topic: Navigation Sensors Dr. Kostas Alexis (CSE) Navigation Sensors Providing the capacity to estimate the state of the aerial robot Self-Localize and estimate
Design and modelling of an airship station holding controller for low cost satellite operations
 AIAA Guidance, Navigation, and Control Conference and Exhibit 15-18 August 25, San Francisco, California AIAA 25-62 Design and modelling of an airship station holding controller for low cost satellite
AIAA Guidance, Navigation, and Control Conference and Exhibit 15-18 August 25, San Francisco, California AIAA 25-62 Design and modelling of an airship station holding controller for low cost satellite
Computer mechanization of six-degree of freedom flight equations
 Computer mechanization of six-degree of freedom flight equations by L. E. FOGARTY and R. M. HOWE University of Michigan The authors were introduced last month when we published their article Trajectory
Computer mechanization of six-degree of freedom flight equations by L. E. FOGARTY and R. M. HOWE University of Michigan The authors were introduced last month when we published their article Trajectory
8.012 Physics I: Classical Mechanics Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
MODELING OF DUST DEVIL ON MARS AND FLIGHT SIMULATION OF MARS AIRPLANE
 MODELING OF DUST DEVIL ON MARS AND FLIGHT SIMULATION OF MARS AIRPLANE Hirotaka Hiraguri*, Hiroshi Tokutake* *Kanazawa University, Japan hiraguri@stu.kanazawa-u.ac.jp;tokutake@se.kanazawa-u.ac.jp Keywords:
MODELING OF DUST DEVIL ON MARS AND FLIGHT SIMULATION OF MARS AIRPLANE Hirotaka Hiraguri*, Hiroshi Tokutake* *Kanazawa University, Japan hiraguri@stu.kanazawa-u.ac.jp;tokutake@se.kanazawa-u.ac.jp Keywords:
16.07 Dynamics Final Exam
 Name:... Massachusetts Institute of Technology 16.07 Dynamics Final Exam Tuesday, December 20, 2005 Problem 1 (8) Problem 2 (8) Problem 3 (10) Problem 4 (10) Problem 5 (10) Problem 6 (10) Problem 7 (10)
Name:... Massachusetts Institute of Technology 16.07 Dynamics Final Exam Tuesday, December 20, 2005 Problem 1 (8) Problem 2 (8) Problem 3 (10) Problem 4 (10) Problem 5 (10) Problem 6 (10) Problem 7 (10)
NAVIGATION (1) GENERAL NAVIGATION
 GENERAL NAVIGATION") 1 Which is the highest latitude listed below at which the sun will rise above the horizon and set every day? A 68 B 66 C 62 D 72 2 An aircraft flies a great circle track from 56 N 070 W to 62 N 110 E.
1 Which is the highest latitude listed below at which the sun will rise above the horizon and set every day? A 68 B 66 C 62 D 72 2 An aircraft flies a great circle track from 56 N 070 W to 62 N 110 E.
SiRF White Paper. Great Circle Distances Computing the distance between two points on the surface of the Earth
 SiRF White Paper Great Circle Distances Computing the distance between two points on the surface of the Earth Carl Carter May 17, 2002 Introduction The distance between two points on the Earth is computed
SiRF White Paper Great Circle Distances Computing the distance between two points on the surface of the Earth Carl Carter May 17, 2002 Introduction The distance between two points on the Earth is computed
EE 570: Location and Navigation
 EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
EE 570: Location and Navigation Sensor Technology Stephen Bruder 1 Aly El-Osery 2 1 Electrical and Computer Engineering Department, Embry-Riddle Aeronautical Univesity Prescott, Arizona, USA 2 Electrical
Modern Navigation. Thomas Herring
 12.215 Modern Navigation Thomas Herring Review of Last Class Almanacs: Paper and electronics Paper Almanacs: Nautical Almanac Electronic: Available on many web sites Homework #1 solutions 10/17/2006 12.215
12.215 Modern Navigation Thomas Herring Review of Last Class Almanacs: Paper and electronics Paper Almanacs: Nautical Almanac Electronic: Available on many web sites Homework #1 solutions 10/17/2006 12.215
Control Volume. Dynamics and Kinematics. Basic Conservation Laws. Lecture 1: Introduction and Review 1/24/2017
 Lecture 1: Introduction and Review Dynamics and Kinematics Kinematics: The term kinematics means motion. Kinematics is the study of motion without regard for the cause. Dynamics: On the other hand, dynamics
Lecture 1: Introduction and Review Dynamics and Kinematics Kinematics: The term kinematics means motion. Kinematics is the study of motion without regard for the cause. Dynamics: On the other hand, dynamics
Lecture 1: Introduction and Review
 Lecture 1: Introduction and Review Review of fundamental mathematical tools Fundamental and apparent forces Dynamics and Kinematics Kinematics: The term kinematics means motion. Kinematics is the study
Lecture 1: Introduction and Review Review of fundamental mathematical tools Fundamental and apparent forces Dynamics and Kinematics Kinematics: The term kinematics means motion. Kinematics is the study
1/3/2011. This course discusses the physical laws that govern atmosphere/ocean motions.
 Lecture 1: Introduction and Review Dynamics and Kinematics Kinematics: The term kinematics means motion. Kinematics is the study of motion without regard for the cause. Dynamics: On the other hand, dynamics
Lecture 1: Introduction and Review Dynamics and Kinematics Kinematics: The term kinematics means motion. Kinematics is the study of motion without regard for the cause. Dynamics: On the other hand, dynamics
Problem 1. Mathematics of rotations
 Problem 1. Mathematics of rotations (a) Show by algebraic means (i.e. no pictures) that the relationship between ω and is: φ, ψ, θ Feel free to use computer algebra. ω X = φ sin θ sin ψ + θ cos ψ (1) ω
Problem 1. Mathematics of rotations (a) Show by algebraic means (i.e. no pictures) that the relationship between ω and is: φ, ψ, θ Feel free to use computer algebra. ω X = φ sin θ sin ψ + θ cos ψ (1) ω
Cubature Particle filter applied in a tightly-coupled GPS/INS navigation system
 Cubature Particle filter applied in a tightly-coupled GPS/INS navigation system Yingwei Zhao & David Becker Physical and Satellite Geodesy Institute of Geodesy TU Darmstadt 1 Yingwei Zhao & David Becker
Cubature Particle filter applied in a tightly-coupled GPS/INS navigation system Yingwei Zhao & David Becker Physical and Satellite Geodesy Institute of Geodesy TU Darmstadt 1 Yingwei Zhao & David Becker
Baro-INS Integration with Kalman Filter
 Baro-INS Integration with Kalman Filter Vivek Dadu c,b.venugopal Reddy a, Brajnish Sitara a, R.S.Chandrasekhar a & G.Satheesh Reddy a c Hindustan Aeronautics Ltd, Korwa, India. a Research Centre Imarat,
Baro-INS Integration with Kalman Filter Vivek Dadu c,b.venugopal Reddy a, Brajnish Sitara a, R.S.Chandrasekhar a & G.Satheesh Reddy a c Hindustan Aeronautics Ltd, Korwa, India. a Research Centre Imarat,
The Pioneer Anomaly Horace Heffner July, 2007
 OBJECTIVE The purpose here is to examine the Pioneer Anomaly, espcially in view of the insights provided by gravimagnetics. 1 THE PIONEER ANOMALY DEFINED The solar mass, or more specifically (G M sun )
OBJECTIVE The purpose here is to examine the Pioneer Anomaly, espcially in view of the insights provided by gravimagnetics. 1 THE PIONEER ANOMALY DEFINED The solar mass, or more specifically (G M sun )
Dynamics of the Earth
 Time Dynamics of the Earth Historically, a day is a time interval between successive upper transits of a given celestial reference point. upper transit the passage of a body across the celestial meridian
Time Dynamics of the Earth Historically, a day is a time interval between successive upper transits of a given celestial reference point. upper transit the passage of a body across the celestial meridian
Flight and Orbital Mechanics
 Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
Flight and Orbital Mechanics Lecture slides Challenge the future 1 Flight and Orbital Mechanics Lecture 7 Equations of motion Mark Voskuijl Semester 1-2012 Delft University of Technology Challenge the
Characterization of low-cost Accelerometers for Use in a Local Positioning System
 Characterization of low-cost Accelerometers for Use in a Local Positioning System Morten Stakkeland Master Thesis Department of Physics University of Oslo 31. July 2003 Acknowledgements... i Mathematical
Characterization of low-cost Accelerometers for Use in a Local Positioning System Morten Stakkeland Master Thesis Department of Physics University of Oslo 31. July 2003 Acknowledgements... i Mathematical
Lecture D15 - Gravitational Attraction. The Earth as a Non-Inertial Reference Frame
 J. Peraire 16.07 Dynamics Fall 2004 Version 1.3 Lecture D15 - Gravitational Attraction. The Earth as a Non-Inertial Reference Frame Gravitational attraction The Law of Universal Attraction was already
J. Peraire 16.07 Dynamics Fall 2004 Version 1.3 Lecture D15 - Gravitational Attraction. The Earth as a Non-Inertial Reference Frame Gravitational attraction The Law of Universal Attraction was already
Gravity in the Ryukyu Arc*
 Journal of the Geodetic Society of Japan Vol. 22, No. 1, (1976), pp. 23-39 Gravity in the Ryukyu Arc* Jiro SEGAWA Ocean Research Institute, University of Tokyo (Received March 31, 1976; Revised May 22,
Journal of the Geodetic Society of Japan Vol. 22, No. 1, (1976), pp. 23-39 Gravity in the Ryukyu Arc* Jiro SEGAWA Ocean Research Institute, University of Tokyo (Received March 31, 1976; Revised May 22,
1. For Cosine Rule of any triangle ABC, b² is equal to A. a² - c² 4bc cos A B. a² + c² - 2ac cos B C. a² - c² + 2ab cos A D. a³ + c³ - 3ab cos A
 1. For Cosine Rule of any triangle ABC, b² is equal to A. a² - c² 4bc cos A B. a² + c² - 2ac cos B C. a² - c² + 2ab cos A D. a³ + c³ - 3ab cos A 2. For Cosine Rule of any triangle ABC, c² is equal to A.
1. For Cosine Rule of any triangle ABC, b² is equal to A. a² - c² 4bc cos A B. a² + c² - 2ac cos B C. a² - c² + 2ab cos A D. a³ + c³ - 3ab cos A 2. For Cosine Rule of any triangle ABC, c² is equal to A.
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
Exam - TTK 4190 Guidance & Control Eksamen - TTK 4190 Fartøysstyring
 Page 1 of 6 Norges teknisk- naturvitenskapelige universitet Institutt for teknisk kybernetikk Faglig kontakt / contact person: Navn: Morten Pedersen, Universitetslektor Tlf.: 41602135 Exam - TTK 4190 Guidance
Page 1 of 6 Norges teknisk- naturvitenskapelige universitet Institutt for teknisk kybernetikk Faglig kontakt / contact person: Navn: Morten Pedersen, Universitetslektor Tlf.: 41602135 Exam - TTK 4190 Guidance
Physics 106b/196b Problem Set 9 Due Jan 19, 2007
 Physics 06b/96b Problem Set 9 Due Jan 9, 2007 Version 3: January 8, 2007 This problem set focuses on dynamics in rotating coordinate systems (Section 5.2), with some additional early material on dynamics
Physics 06b/96b Problem Set 9 Due Jan 9, 2007 Version 3: January 8, 2007 This problem set focuses on dynamics in rotating coordinate systems (Section 5.2), with some additional early material on dynamics
The Research of Tight MINS/GPS Integrated navigation System Based Upon Date Fusion
 International Conference on Computer and Information echnology Application (ICCIA 016) he Research of ight MINS/GPS Integrated navigation System Based Upon Date Fusion ao YAN1,a, Kai LIU1,b and ua CE1,c
International Conference on Computer and Information echnology Application (ICCIA 016) he Research of ight MINS/GPS Integrated navigation System Based Upon Date Fusion ao YAN1,a, Kai LIU1,b and ua CE1,c
State Estimation for Autopilot Control of Small Unmanned Aerial Vehicles in Windy Conditions
 University of Colorado, Boulder CU Scholar Aerospace Engineering Sciences Graduate Theses & Dissertations Aerospace Engineering Sciences Summer 7-23-2014 State Estimation for Autopilot Control of Small
University of Colorado, Boulder CU Scholar Aerospace Engineering Sciences Graduate Theses & Dissertations Aerospace Engineering Sciences Summer 7-23-2014 State Estimation for Autopilot Control of Small
Modern Inertial Technology
 Modern Inertial Technology Anthony Lawrence Modern Inertial Technology Navigation, Guidance, and Control With 129 Illustrations Springer-Verlag New York Berlin Heidelberg London Paris Tokyo Hong Kong Barcelona
Modern Inertial Technology Anthony Lawrence Modern Inertial Technology Navigation, Guidance, and Control With 129 Illustrations Springer-Verlag New York Berlin Heidelberg London Paris Tokyo Hong Kong Barcelona
AH Mechanics Checklist (Unit 1) AH Mechanics Checklist (Unit 1) Rectilinear Motion
 AH Mechanics Checklist (Unit 1) Rectilinear Motion") Rectilinear Motion No. kill Done 1 Know that rectilinear motion means motion in 1D (i.e. along a straight line) Know that a body is a physical object 3 Know that a particle is an idealised body that has
Rectilinear Motion No. kill Done 1 Know that rectilinear motion means motion in 1D (i.e. along a straight line) Know that a body is a physical object 3 Know that a particle is an idealised body that has
Chapter 10. Path Following. Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012, Chapter 10, Slide 1
 Chapter 10 Path Following Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012, Chapter 10, Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
Chapter 10 Path Following Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012, Chapter 10, Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
Lecture D21 - Pendulums
 J. Peraire 16.07 Dynamics Fall 2004 Version 1.1 ecture D21 - Pendulums A pendulum is a rigid body suspended from a fixed point (hinge) which is offset with respect to the body s center of mass. If all
J. Peraire 16.07 Dynamics Fall 2004 Version 1.1 ecture D21 - Pendulums A pendulum is a rigid body suspended from a fixed point (hinge) which is offset with respect to the body s center of mass. If all
Today. Why idealized? Idealized physical models of robotic vehicles. Noise. Idealized physical models of robotic vehicles
 PID controller COMP417 Introduction to Robotics and Intelligent Systems Kinematics and Dynamics Perhaps the most widely used controller in industry and robotics. Perhaps the easiest to code. You will also
PID controller COMP417 Introduction to Robotics and Intelligent Systems Kinematics and Dynamics Perhaps the most widely used controller in industry and robotics. Perhaps the easiest to code. You will also
MAE 142 Homework #5 Due Friday, March 13, 2009
 MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
Chapter 1. Introduction. 1.1 System Architecture
 Chapter 1 Introduction 1.1 System Architecture The objective of this book is to prepare the reader to do research in the exciting and rapidly developing field of autonomous navigation, guidance, and control
Chapter 1 Introduction 1.1 System Architecture The objective of this book is to prepare the reader to do research in the exciting and rapidly developing field of autonomous navigation, guidance, and control
Wind data collected by a fixed-wing aircraft in the vicinity of a typhoon over the south China coastal waters
 Wind data collected by a fixed-wing aircraft in the vicinity of a typhoon over the south China coastal waters P.W. Chan * and K.K. Hon Hong Kong Observatory, Hong Kong, China Abstract: The fixed-wing aircraft
Wind data collected by a fixed-wing aircraft in the vicinity of a typhoon over the south China coastal waters P.W. Chan * and K.K. Hon Hong Kong Observatory, Hong Kong, China Abstract: The fixed-wing aircraft
Non-inertial systems - Pseudo Forces
 Non-inertial systems - Pseudo Forces ?? ame Accelerating frame Newton's second law F = ma holds true only in inertial coordinate systems. However, there are many noninertial (that is, accelerating) frames
Non-inertial systems - Pseudo Forces ?? ame Accelerating frame Newton's second law F = ma holds true only in inertial coordinate systems. However, there are many noninertial (that is, accelerating) frames
OUTCOME 2 KINEMATICS AND DYNAMICS
 Unit 60: Dynamics of Machines Unit code: H/601/1411 QCF Level:4 Credit value:15 OUTCOME 2 KINEMATICS AND DYNAMICS TUTORIAL 3 GYROSCOPES 2 Be able to determine the kinetic and dynamic parameters of mechanical
Unit 60: Dynamics of Machines Unit code: H/601/1411 QCF Level:4 Credit value:15 OUTCOME 2 KINEMATICS AND DYNAMICS TUTORIAL 3 GYROSCOPES 2 Be able to determine the kinetic and dynamic parameters of mechanical
Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm
 Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm Robert L Cooperman Raytheon Co C 3 S Division St Petersburg, FL Robert_L_Cooperman@raytheoncom Abstract The problem of
Tactical Ballistic Missile Tracking using the Interacting Multiple Model Algorithm Robert L Cooperman Raytheon Co C 3 S Division St Petersburg, FL Robert_L_Cooperman@raytheoncom Abstract The problem of
Silicon Capacitive Accelerometers. Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES
 Business Development Manager VTI TECHNOLOGIES") Silicon Capacitive Accelerometers Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES 1 Measuring Acceleration The acceleration measurement is based on Newton s 2nd law: Let the acceleration
Silicon Capacitive Accelerometers Ulf Meriheinä M.Sc. (Eng.) Business Development Manager VTI TECHNOLOGIES 1 Measuring Acceleration The acceleration measurement is based on Newton s 2nd law: Let the acceleration
Classical Dynamics: Question Sheet
 Pt 1B Advanced Physics Lent 5 Classical Dynamics: Question Sheet J. Ellis Questions are graded A to C in increasing order of difficulty. Energy Method 1(B) A ladder of length l rests against a wall at
Pt 1B Advanced Physics Lent 5 Classical Dynamics: Question Sheet J. Ellis Questions are graded A to C in increasing order of difficulty. Energy Method 1(B) A ladder of length l rests against a wall at
Marine Gyro Compasses for Ships' Officers
 Marine Gyro Compasses for Ships' Officers BY A. FROST, B.Sc., MASTERMARINER,M.R.I.N. GLASGOW BROWN, SON & FERGUSON LTD. NAUTICALPUBLISHERS 4-10 DARNLEYSTREET Copyright in all countries signatory to the
Marine Gyro Compasses for Ships' Officers BY A. FROST, B.Sc., MASTERMARINER,M.R.I.N. GLASGOW BROWN, SON & FERGUSON LTD. NAUTICALPUBLISHERS 4-10 DARNLEYSTREET Copyright in all countries signatory to the
Determining absolute orientation of a phone by imaging celestial bodies
 Technical Disclosure Commons Defensive Publications Series October 06, 2017 Determining absolute orientation of a phone by imaging celestial bodies Chia-Kai Liang Yibo Chen Follow this and additional works
Technical Disclosure Commons Defensive Publications Series October 06, 2017 Determining absolute orientation of a phone by imaging celestial bodies Chia-Kai Liang Yibo Chen Follow this and additional works
8.012 Physics I: Classical Mechanics Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
MIT OpenCourseWare http://ocw.mit.edu 8.012 Physics I: Classical Mechanics Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS INSTITUTE
Lecture Module 2: Spherical Geometry, Various Axes Systems
 1 Lecture Module 2: Spherical Geometry, Various Axes Systems Satellites in space need inertial frame of reference for attitude determination. In a true sense, all bodies in universe are in motion and inertial
1 Lecture Module 2: Spherical Geometry, Various Axes Systems Satellites in space need inertial frame of reference for attitude determination. In a true sense, all bodies in universe are in motion and inertial
Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010
 Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010 Problem 1: Control of Short Period Dynamics Consider the
Department of Aerospace Engineering and Mechanics University of Minnesota Written Preliminary Examination: Control Systems Friday, April 9, 2010 Problem 1: Control of Short Period Dynamics Consider the
Measuring 3D wind fields in mountain waves using sailplane flight data
 Measuring 3D wind fields in mountain waves using sailplane flight data Ni Zhang, Alan Hunter, Rick Millane, Einar Enevoldson and Jim Murray Computational Imaging Group Department of Electrical and Computer
Measuring 3D wind fields in mountain waves using sailplane flight data Ni Zhang, Alan Hunter, Rick Millane, Einar Enevoldson and Jim Murray Computational Imaging Group Department of Electrical and Computer
5.12 The Aerodynamic Assist Trajectories of Vehicles Propelled by Solar Radiation Pressure References...
 1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
Laws of gyroscopes / cardanic gyroscope
 Principle If the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation frequency and gyrofrequency is examined
Principle If the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation frequency and gyrofrequency is examined
Generalized mathematical model of a linear single-axis accelerometer as an integral part of the inclinometer
 Generalized mathematical model of a linear single-axis accelerometer as an integral part of the inclinometer A. N. Krasnov 1, G. Y. Kolovertnov 2, V. E. Lyalin 3 1, 2 Ufa State Petroleum Technological
Generalized mathematical model of a linear single-axis accelerometer as an integral part of the inclinometer A. N. Krasnov 1, G. Y. Kolovertnov 2, V. E. Lyalin 3 1, 2 Ufa State Petroleum Technological
Sensors Fusion for Mobile Robotics localization. M. De Cecco - Robotics Perception and Action
 Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Sensors Fusion for Mobile Robotics localization 1 Until now we ve presented the main principles and features of incremental and absolute (environment referred localization systems) could you summarize
Ocean Modeling - EAS Chapter 2. We model the ocean on a rotating planet
 Ocean Modeling - EAS 8803 We model the ocean on a rotating planet Rotation effects are considered through the Coriolis and Centrifugal Force The Coriolis Force arises because our reference frame (the Earth)
Ocean Modeling - EAS 8803 We model the ocean on a rotating planet Rotation effects are considered through the Coriolis and Centrifugal Force The Coriolis Force arises because our reference frame (the Earth)
Arrow Brasil. Rodrigo Rodrigues Field Application Engineer F: Date: 30/01/2014 TM 2
 TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
TM Arrow Brasil Rodrigo Rodrigues Field Application Engineer Rodrigo.rodrigues@arrowbrasil.com.br F:+55 11 3613-9331 Date: 30/01/2014 TM 2 State-of-the-art review Introduction How a Gyro Works Performance
Chapter 9. Nonlinear Design Models. Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012, Chapter 9, Slide 1
 Chapter 9 Nonlinear Design Models Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012, Chapter 9, Slide 1 Architecture Destination, obstacles Waypoints Path Definition Airspeed, Altitude,
Chapter 9 Nonlinear Design Models Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012, Chapter 9, Slide 1 Architecture Destination, obstacles Waypoints Path Definition Airspeed, Altitude,
LAWS OF GYROSCOPES / CARDANIC GYROSCOPE
 LAWS OF GYROSCOPES / CARDANC GYROSCOPE PRNCPLE f the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation
LAWS OF GYROSCOPES / CARDANC GYROSCOPE PRNCPLE f the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation
Research Article Error Modeling, Calibration, and Nonlinear Interpolation Compensation Method of Ring Laser Gyroscope Inertial Navigation System
 Abstract and Applied Analysis Volume 213, Article ID 359675, 7 pages http://dx.doi.org/1.1155/213/359675 Research Article Error Modeling, Calibration, and Nonlinear Interpolation Compensation Method of
Abstract and Applied Analysis Volume 213, Article ID 359675, 7 pages http://dx.doi.org/1.1155/213/359675 Research Article Error Modeling, Calibration, and Nonlinear Interpolation Compensation Method of
The Airborne Gyroscope
 The Airborne Gyroscope Chris Hodgson and Paul Hughes Department of Physics and Astronomy The University of Manchester Manchester M13 9PL First Year Laboratory Report Nov 3 Abstract Gyroscopic motion involves
The Airborne Gyroscope Chris Hodgson and Paul Hughes Department of Physics and Astronomy The University of Manchester Manchester M13 9PL First Year Laboratory Report Nov 3 Abstract Gyroscopic motion involves
Locating and supervising relief forces in buildings without the use of infrastructure
 Locating and supervising relief forces in buildings without the use of infrastructure Tracking of position with low-cost inertial sensors Martin Trächtler 17.10.2014 18th Leibniz Conference of advanced
Locating and supervising relief forces in buildings without the use of infrastructure Tracking of position with low-cost inertial sensors Martin Trächtler 17.10.2014 18th Leibniz Conference of advanced
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
GP-B Attitude and Translation Control. John Mester Stanford University
 GP-B Attitude and Translation Control John Mester Stanford University 1 The GP-B Challenge Gyroscope (G) 10 7 times better than best 'modeled' inertial navigation gyros Telescope (T) 10 3 times better
GP-B Attitude and Translation Control John Mester Stanford University 1 The GP-B Challenge Gyroscope (G) 10 7 times better than best 'modeled' inertial navigation gyros Telescope (T) 10 3 times better
Low-Cost Integrated Navigation System
 Institute of Flight System Dynamics Technische Universität München Prof. Dr.-Ing. Florian Holzapfel Eecuted at Robotics and Automation Lab Centre for Intelligent Information Processing Systems University
Institute of Flight System Dynamics Technische Universität München Prof. Dr.-Ing. Florian Holzapfel Eecuted at Robotics and Automation Lab Centre for Intelligent Information Processing Systems University
Navigation Mathematics: Kinematics (Earth Surface & Gravity Models) EE 570: Location and Navigation
 EE 570: Location and Navigation") Lecture Navigation Mathematics: Kinematics (Earth Surface & ) EE 570: Location and Navigation Lecture Notes Update on March 10, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
Lecture Navigation Mathematics: Kinematics (Earth Surface & ) EE 570: Location and Navigation Lecture Notes Update on March 10, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
Lecture AC-1. Aircraft Dynamics. Copy right 2003 by Jon at h an H ow
 Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Fundamentals of Satellite technology
 Fundamentals of Satellite technology Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Orbital Plane All of the planets,
Fundamentals of Satellite technology Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Orbital Plane All of the planets,
Lecture-XV. Noninertial systems
 Lecture-XV Noninertial systems Apparent Force in Rotating Coordinates The force in the ating system is where The first term is called the Coriolis force, a velocity dependent force and the second term,
Lecture-XV Noninertial systems Apparent Force in Rotating Coordinates The force in the ating system is where The first term is called the Coriolis force, a velocity dependent force and the second term,
Classical Mechanics III (8.09) Fall 2014 Assignment 3
 Fall 2014 Assignment 3") Classical Mechanics III (8.09) Fall 2014 Assignment 3 Massachusetts Institute of Technology Physics Department Due September 29, 2014 September 22, 2014 6:00pm Announcements This week we continue our discussion
Classical Mechanics III (8.09) Fall 2014 Assignment 3 Massachusetts Institute of Technology Physics Department Due September 29, 2014 September 22, 2014 6:00pm Announcements This week we continue our discussion
NAVIGATION THEORY QUESTIONS Basics of Navigation
 NAVIGATION THEORY QUESTIONS Basics of Navigation Q610065 look at it The angle between the plane of the ecliptic and the plane of equator is approx? 23.5 degrees In which two months of the year is the difference
NAVIGATION THEORY QUESTIONS Basics of Navigation Q610065 look at it The angle between the plane of the ecliptic and the plane of equator is approx? 23.5 degrees In which two months of the year is the difference
Astronomy 6570 Physics of the Planets
 Astronomy 6570 Physics of the Planets Planetary Rotation, Figures, and Gravity Fields Topics to be covered: 1. Rotational distortion & oblateness 2. Gravity field of an oblate planet 3. Free & forced planetary
Astronomy 6570 Physics of the Planets Planetary Rotation, Figures, and Gravity Fields Topics to be covered: 1. Rotational distortion & oblateness 2. Gravity field of an oblate planet 3. Free & forced planetary
Phys 7221, Fall 2006: Midterm exam
 Phys 7221, Fall 2006: Midterm exam October 20, 2006 Problem 1 (40 pts) Consider a spherical pendulum, a mass m attached to a rod of length l, as a constrained system with r = l, as shown in the figure.
Phys 7221, Fall 2006: Midterm exam October 20, 2006 Problem 1 (40 pts) Consider a spherical pendulum, a mass m attached to a rod of length l, as a constrained system with r = l, as shown in the figure.
Lecture PowerPoints. Chapter 11. Physics for Scientists and Engineers, with Modern Physics, 4 th edition Giancoli
 Lecture PowerPoints Chapter 11 Physics for Scientists and Engineers, with Modern Physics, 4 th edition Giancoli 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is
Lecture PowerPoints Chapter 11 Physics for Scientists and Engineers, with Modern Physics, 4 th edition Giancoli 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING
 FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
Landing-Sensor Choosing for Lunar Soft-Landing Process
 Landing-Sensor Choosing for Lunar Soft-Landing Process Huang hao Chu Guibai Zhang He (China Academy of Space Technology, No.104 Youyi Road Haidian Beijing China) Abstract: Soft landing is an important
Landing-Sensor Choosing for Lunar Soft-Landing Process Huang hao Chu Guibai Zhang He (China Academy of Space Technology, No.104 Youyi Road Haidian Beijing China) Abstract: Soft landing is an important
Show all work in answering the following questions. Partial credit may be given for problems involving calculations.
 Physics 3210, Spring 2018 Final Exam Name: Signature: UID: Please read the following before continuing: Show all work in answering the following questions. Partial credit may be given for problems involving
Physics 3210, Spring 2018 Final Exam Name: Signature: UID: Please read the following before continuing: Show all work in answering the following questions. Partial credit may be given for problems involving
Geog Lecture 29 Mapping and GIS Continued
 Geog 1000 - Lecture 29 Mapping and GIS Continued http://scholar.ulethbridge.ca/chasmer/classes/ Today s Lecture (Pgs 13-25, 28-29) 1. Hand back Assignment 3 2. Review of Dr. Peddle s lecture last week
Geog 1000 - Lecture 29 Mapping and GIS Continued http://scholar.ulethbridge.ca/chasmer/classes/ Today s Lecture (Pgs 13-25, 28-29) 1. Hand back Assignment 3 2. Review of Dr. Peddle s lecture last week
Single particle motion
 Single particle motion Plasma is a collection of a very large number of charged particles moving in, and giving rise to, electromagnetic fields. Before going to the statistical descriptions, let us learn
Single particle motion Plasma is a collection of a very large number of charged particles moving in, and giving rise to, electromagnetic fields. Before going to the statistical descriptions, let us learn
28. Motion in a Non-inertial Frame of Reference
 8 Motion in a Non-inertial Frame of Reference Michael Fowler The Lagrangian in Accelerating and Rotating Frames This section concerns the motion of a single particle in some potential U( r ) in a non-inertial
8 Motion in a Non-inertial Frame of Reference Michael Fowler The Lagrangian in Accelerating and Rotating Frames This section concerns the motion of a single particle in some potential U( r ) in a non-inertial
3 Space curvilinear motion, motion in non-inertial frames
 3 Space curvilinear motion, motion in non-inertial frames 3.1 In-class problem A rocket of initial mass m i is fired vertically up from earth and accelerates until its fuel is exhausted. The residual mass
3 Space curvilinear motion, motion in non-inertial frames 3.1 In-class problem A rocket of initial mass m i is fired vertically up from earth and accelerates until its fuel is exhausted. The residual mass
Barometer-Aided Road Grade Estimation
 Barometer-Aided Road Grade Estimation Jussi Parviainen, Jani Hautamäki, Jussi Collin and Jarmo Takala Tampere University of Technology, Finland BIOGRAPHY Jussi Parviainen received his M.Sc. degree in May
Barometer-Aided Road Grade Estimation Jussi Parviainen, Jani Hautamäki, Jussi Collin and Jarmo Takala Tampere University of Technology, Finland BIOGRAPHY Jussi Parviainen received his M.Sc. degree in May
Motion In Two Dimensions
 Motion In Two Dimensions 1. Projectile motion is: (a) One dimensional (b) Two dimensional (c) Three dimensional (d) Multi-dimensional 2. For projectile motion: (a) A body must be thrown vertically (b)
Motion In Two Dimensions 1. Projectile motion is: (a) One dimensional (b) Two dimensional (c) Three dimensional (d) Multi-dimensional 2. For projectile motion: (a) A body must be thrown vertically (b)
Applications Linear Control Design Techniques in Aircraft Control I
 Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
Lecture 29 Applications Linear Control Design Techniques in Aircraft Control I Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore Topics Brief Review
FLUVIA NAUTIC DATASET (16 March 2007) Description of the sensor logs
 Description of the sensor logs") FLUVIA NAUTIC DATASET (16 March 2007) Description of the sensor logs David Ribas, PhD Student. Underwater Robotics Lab, Computer Vision and Robotics Group, University of Girona Doppler Velocity Log (Argonaut
FLUVIA NAUTIC DATASET (16 March 2007) Description of the sensor logs David Ribas, PhD Student. Underwater Robotics Lab, Computer Vision and Robotics Group, University of Girona Doppler Velocity Log (Argonaut
Problem 1: Ship Path-Following Control System (35%)
") Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.
Problem 1: Ship Path-Following Control System (35%) Consider the kinematic equations: Figure 1: NTNU s research vessel, R/V Gunnerus, and Nomoto model: T ṙ + r = Kδ (1) with T = 22.0 s and K = 0.1 s 1.