Finite Element Modeling and Analysis. CE 595: Course Part 2 Amit H. Varma
|
|
|
- Mark Mosley
- 6 years ago
- Views:
Transcription

1 Finite Element Modeling and Analysis CE 595: Course Part 2 Amit H. Varma
2 Discussion of planar elements Constant Strain Triangle (CST) - easiest and simplest finite element Displacement field in terms of generalized coordinates Resulting strain field is Strains do not vary within the element. Hence, the name constant strain triangle (CST) Other elements are not so lucky. Can also be called linear triangle because displacement field is linear in x and y - sides remain straight.
3 Constant Strain Triangle The strain field from the shape functions looks like: Where, x i and y i are nodal coordinates (i=1, 2, 3) x ij = x i - x j and y ij =y i - y j 2A is twice the area of the triangle, 2A = x 21 y 31 -x 31 y 21 Node numbering is arbitrary except that the sequence 123 must go clockwise around the element if A is to be positive.
4 Constant Strain Triangle Stiffness matrix for element k =B T EB ta The CST gives good results in regions of the FE model where there is little strain gradient Otherwise it does not work well. If you use CST to model bending. See the stress along the x-axis - it should be zero. The predictions of deflection and stress are poor Spurious shear stress when bent Mesh refinement will help.
5 Linear Strain Triangle Changes the shape functions and results in quadratic displacement distributions and linear strain distributions within the element.
6 Linear Strain Triangle Will this element work better for the problem?
7 Example Problem Consider the problem we were looking at: 1k 1 in. 5 in. I = /12 = in 4 σ = M c I ε = σ E = = =60ksi 1k 0.1 in. δ = ML2 2EI = =0.0517in.
8 Bilinear Quadratic The Q4 element is a quadrilateral element that has four nodes. In terms of generalized coordinates, its displacement field is:
9 Bilinear Quadratic Shape functions and strain-displacement matrix
10 Bilinear Quadratic The element stiffness matrix is obtained the same way A big challenge with this element is that the displacement field has a bilinear approximation, which means that the strains vary linearly in the two directions. But, the linear variation does not change along the length of the element. y, v ε y x, u ε x ε x ε y ε x ε x varies with y but not with x ε y varies with x but not with y ε y
11 Bilinear Quadratic So, this element will struggle to model the behavior of a beam with moment varying along the length. Inspite of the fact that it has linearly varying strains - it will struggle to model when M varies along the length. Another big challenge with this element is that the displacement functions force the edges to remain straight - no curving during deformation.
12 Bilinear Quadratic The sides of the element remain straight - as a result the angle between the sides changes. Even for the case of pure bending, the element will develop a change in angle between the sides - which corresponds to the development of a spurious shear stress. The Q4 element will resist even pure bending by developing both normal and shear stresses. This makes it too stiff in bending. The element converges properly with mesh refinement and in most problems works better than the CST element.
13 Example Problem Consider the problem we were looking at: 0.1k 1 in. 0.1k I = in. / 12 = in M c σ = = = 60ksi I σ ε = = E 3 PL δ = = 3EI = in. 0.1 in.
14 Quadratic Quadrilateral Element The 8 noded quadratic quadrilateral element uses quadratic functions for the displacements
15 Quadratic Quadrilateral Element Shape function examples: Strain distribution within the element
16 Quadratic Quadrilateral Element Should we try to use this element to solve our problem? Or try fixing the Q4 element for our purposes. Hmm tough choice.
17 Improved Bilinear Quadratic (Q6) The principal defect of the Q4 element is its overstiffness in bending. For the situation shown below, you can use the strain displacement relations, stress-strain relations, and stress resultant equation to determine the relationship between M 1 and M 2 b M 2 4 y a M 1 x M 2 = υ 1 υ +1 a 2 b 2 M 1 M 2 increases infinitely as the element aspect ratio (a/b) becomes larger. This phenomenon is known as locking. It is recommended to not use the Q4 element with too large aspect ratios - as it will have infinite stiffness
18 Improved bilinear quadratic (Q6) One approach is to fix the problem by making a simple modification, which results in an element referred sometimes as a Q6 element Its displacement functions for u and v contain six shape functions instead of four. The displacement field is augmented by modes that describe the state of constant curvature. Consider the modes associated with degrees of freedom g 2 and g 3.
19 Improved Bilinear Quadratic These corrections allow the elements to curve between the nodes and model bending with x or y axis as the neutral axis. In pure bending the shear stress in the element will be The negative terms balance out the positive terms. The error in the shear strain is minimized.
20 Improved Bilinear Quadratic The additional degrees of freedom g 1 - g 4 are condensed out before the element stiffness matrix is developed. Static condensation is one of the ways. The element can model pure bending exactly, if it is rectangular in shape. This element has become very popular and in many softwares, they don t even tell you that the Q4 element is actually a modified (or tweaked) Q4 element that will work better. Important to note that g 1 -g 4 are internal degrees of freedom and unlike nodal d.o.f. they are not connected to to other elements. Modes associated with d.o.f. g i are incompatible or nonconforming.
21 Improved bilinear quadratic Under some loading, on overlap or gap may be present between elements Not all but some loading conditions this will happen. This is different from the original Q4 element and is a violation of physical continuum laws. Then why is it acceptable? Elements approach a state Of cons

22 No numbers! What happened here?
23 Discontinuity! Discontinuity! Discontinuity!
24 Q6 or Q4 with incompatible modes Why is it stepped? LST elements Note the discontinuities Q4 elements Why is it stepped? Q8 elements Small discontinuities?
25 Values are too low
26 Q6 or Q4 with incompatible modes LST elements Q4 elements Q8 elements

27 Q6 or Q4 with incompatible modes Accurate shear stress? LST elements Discontinuities Q4 elements Q8 elements Some issues!
28 Lets refine the Q8 model. Quadruple the number of elements - replace 1 by 4 (keeping the same aspect ratio but finer mesh). Fix the boundary conditions to include additional nodes as shown Define boundary on the edge! Black The contours look great! So, why is it over-predicting?? The principal stresses look great Is there a problem here?
29 Shear stresses look good But, what is going on at the support Why is there S22 at the supports? Is my model wrong?
30 Reading assignment Section 3.8 Figure and associated text Mechanical loads consist of concentrated loads at nodes, surface tractions, and body forces. Traction and body forces cannot be applied directly to the FE model. Nodal loads can be applied. They must be converted to equivalent nodal loads. Consider the case of plane stress with translational d.o.f at the nodes. A surface traction can act on boundaries of the FE mesh. Of course, it can also be applied to the interior.
31 Equivalent Nodal Loads Traction has arbitrary orientation with respect to the boundary but is usually expressed in terms of the components normal and tangent to the boundary.
32 Principal of equivalent work The boundary tractions (and body forces) acting on the element sides are converted into equivalent nodal loads. The work done by the nodal loads going through the nodal displacements is equal to the work done by the the tractions (or body forces) undergoing the side displacements
33 Body Forces Body force (weight) converted to equivalent nodal loads. Interesting results for LST and Q8
34 Important Limitation These elements have displacement degrees of freedom only. So what is wrong with the picture below? Is this the way to fix it?
35 Stress tensor Stress Analysis σ xx τ xy τ xz τ xy σ yy τ yz τ xz τ yz σ zz If you consider two coordinate systems (xyz) and (XYZ) with the same origin The cosines of the angles between the coordinate axes (x,y,z) and the axes (X, Y, Z) are as follows Each entry is the cosine of the angle between the coordinate axes designated at the top of the column and to the left of the row. (Example, l 1 =cos θ xx, l 2 =cos θ xy ) x y z X l 1 m 1 n 1 Y l 2 m 2 n 2 Z l 3 m 3 n 3 z z y X Y x
36 Stress Analysis The direction cosines follow the equations: For the row elements: l i 2 +m i 2 +n i 2 =1 l 1 l 2 +m 1 m 2 +n 1 n 2 =0 l 1 l 3 +m 1 m 3 +n 1 n 3 =0 l 3 l 2 +m 3 m 2 +n 3 n 2 =0 For the column elements: l 1 2 +l 2 2 +l 3 2 =1 for I=1..3 Similarly, sum (m i 2 )=1 and sum(n i 2 )=1 l 1 m 1 +l 2 m 2 +l 3 m 3 =0 l 1 n 1 +l 2 n 2 +l 3 n 3 =0 n 1 m 1 +n 2 m 2 +n 3 m 3 =0 The stresses in the coordinates XYZ will be:
37 Stress Analysis σ XX =l 12 σ xx +m 12 σ yy +n 12 σ zz +2m 1 n 1 τ yz +2n 1 l 1 τ zx +2l 1 m 1 τ xy Equations A σ YY =l 22 σ xx +m 22 σ yy +n 22 σ zz +2m 2 n 2 τ yz +2n 2 l 2 τ zx +2l 2 m 2 τ xy σ ZZ =l 32 σ xx +m 32 σ yy +n 32 σ zz +2m 3 n 3 τ yz +2n 3 l 3 τ zx +2l 3 m 3 τ xy τ XY =l 1 l 2 σ xx +m 1 m 2 σ yy +n 1 n 2 σ zz +(m 1 n 2 +m 2 n 1 )τ yz +(l 1 n 2 +l 2 n 1 )τ xz +(l 1 m 2 +l 2 m 1 )τ xy τ Xz =l 1 l 3 σ xx +m 1 m 3 σ yy +n 1 n 3 σ zz +(m 1 n 3 +m 3 n 1 )τ yz +(l 1 n 3 +l 3 n 1 )τ xz +(l 1 m 3 +l 3 m 1 )τ xy τ YZ =l 3 l 2 σ xx +m 3 m 2 σ yy +n 3 n 2 σ zz +(m 2 n 3 +m 3 n 2 )τ yz +(l 2 n 3 +l 3 n 2 )τ xz +(l 3 m 2 +l 2 m 3 )τ xy Principal stresses are the normal stresses on the principal planes where the shear stresses become zero σ P =σ N where σ is the magnitude and N is unit normal to the principal plane Let N = l i + m j +n k (direction cosines) Projections of σ P along x, y, z axes are σ Px =σ l, σ Py =σ m, σ Pz =σ n
38 Stress Analysis Force equilibrium requires that: Therefore, l (σ xx -σ) + m τ xy +n τ xz =0 l τ xy + m (σ yy -σ) + n σ yz = 0 l σ xz + m σ yz + n (σ zz -σ) = 0 σ xx σ τ xy τ xz τ xy σ yy σ τ yz =0 τ xz τ yz σ zz σ σ 3 I 1 σ 2 +I 2 σ I 3 =0 where, I 1 = σ xx + σ yy + σ zz I 2 = σ xx τ xy + σ xx τ xz + σ yy τ yz = σ τ xy σ yy τ xz σ zz τ yz σ xx σ yy + σ xx σ zz + σ yy σ zz τ 2 xy τ 2 2 xz τ yz zz I 3 = σ xx τ xy τ xz τ xy σ yy τ yz τ xz τ yz σ zz Equation C Equations B
39 Stress Analysis The three roots of the equation are the principal stresses (3). The three terms I 1, I 2, and I 3 are stress invariants. That means, any xyz direction, the stress components will be different but I 1, I 2, and I 3 will be the same. Why? --- Hmm. In terms of principal stresses, the stress invariants are: I 1 = σ p1 +σ p2 +σ p3 ; I 2 =σ p1 σ p2 +σ p2 σ p3 +σ p1 σ p3 ; I 3 = σ p1 σ p2 σ p3 ❿ In case you were wondering, the directions of the principal stresses are calculated by substituting σ=σ p1 and calculating the corresponding l, m, n using Equations (B).
40 Stress Analysis The stress tensor can be discretized into two parts: σ xx τ xy τ xz σ m 0 0 σ xx σ m τ xy τ xz τ xy σ yy τ yz = 0 σ m 0 + τ xy σ yy σ m τ yz τ xz τ yz σ zz 0 0 σ m τ xz τ yz σ zz σ m where, σ m = σ + σ + σ xx yy zz = I Stress Tensor = Mean Stress Tensor + Deviatoric Stress Tensor = + Original element Volume change Distortion only - no volume change σ m is referred as the mean stress, or hydostatic pressure, or just pressure (PRESS)
41 In terms of principal stresses Stress Analysis σ p1 0 0 σ m 0 0 σ p1 σ m σ p2 0 = 0 σ m σ p2 σ m σ p3 0 0 σ m 0 0 σ p3 σ m where, σ m = σ p1 +σ p2 + σ p3 = I σ p1 σ p2 σ p σ Deviatoric Stress Tensor = 0 p2 σ p1 σ p The stress in variants of deviatoric stress tensor J 1 =0 [( ) 2 + ( σ p2 σ p3 ) 2 + ( σ p3 σ p1 ) 2 ] =I 2 I 1 J 2 = 1 6 σ p1 σ p2 3 J 3 = 2σ p1 σ p2 σ p3 2σ p2 σ p1 σ p3 2σ p3 σ p1 σ p2 =I I 1I 2 2 2σ p3 σ p1 σ p I 1 27
42 Stress Analysis The Von-mises stress is 3 J 2 The Tresca stress is max {(σ p1 -σ p2 ), (σ p1 -σ p3 ), (σ p2 -σ p3 )} Why did we obtain this? Why is this important? And what does it mean? Hmmm.
43 Isoparametric Elements and Solution Biggest breakthrough in the implementation of the finite element method is the development of an isoparametric element with capabilities to model structure (problem) geometries of any shape and size. The whole idea works on mapping. The element in the real structure is mapped to an imaginary element in an ideal coordinate system The solution to the stress analysis problem is easy and known for the imaginary element These solutions are mapped back to the element in the real structure. All the loads and boundary conditions are also mapped from the real to the imaginary element in this approach
44 Isoparametric Element 4 (x 4, y 4 ) 3 (x 3, y 3 ) η 4 3 (-1, 1) (1, 1) ξ Y,v 1 (x 1, y 1 ) 2 (x 2, y 2 ) 1 (-1, -1) 2 (1, -1) X, u
45 Isoparametric element The mapping functions are quite simple: X = N 1 N 2 N 3 N Y N 1 N 2 N 3 N 4 N 1 = 1 (1 ξ)(1 η) 4 N 2 = 1 (1 + ξ)(1 η) 4 N 3 = 1 (1 + ξ)(1+ η) 4 N 4 = 1 (1 ξ)(1+ η) 4 x 1 x 2 x 3 x 4 y 1 y 2 y 3 y 4 Basically, the x and y coordinates of any point in the element are interpolations of the nodal (corner) coordinates. From the Q4 element, the bilinear shape functions are borrowed to be used as the interpolation functions. They readily satisfy the boundary values too.
46 Isoparametric element Nodal shape functions for displacements u = N 1 N 2 N 3 N v N 1 N 2 N 3 N 4 N 1 = 1 (1 ξ)(1 η) 4 N 2 = 1 (1+ ξ)(1 η) 4 N 3 = 1 (1+ ξ)(1+ η) 4 N 4 = 1 (1 ξ)(1+ η) 4 u 1 u 2 u 3 u 4 v 1 v 2 v 3 v 4
47 The displacement strain relationships: ε x = u X = u ξ ξ X + u η η X ε y = v Y = v ξ ξ Y + v η η Y ε x ε y ε xy u ξ η X X X v = = 0 0 Y u Y + v ξ η X Y Y But,itistoodifficulttoobtain ξ η and X X u 0 0 ξ ξ η u η Y Y v ξ η ξ X X v η
48 Isoparametric Element Hence we will do it another way u ξ = u X X ξ + u Y Y ξ u η = u X X η + u Y Y η u X ξ = ξ u X η η Y u ξ X Y u η Y Itiseasiertoobtain X Y and ξ ξ X ξ J = X η Y ξ =Jacobian Y η defines coordinate transformation X ξ = N i X ξ i X η = N i X η i u X u = J Y ξ u η u [ ] 1 Y ξ = Y η = N i ξ Y i N i η Y i
49 Isoparametric Element ε x = u X =J * u 11 ξ +J * u 12 η wherej * 11 andj * 12 arecoefficientsinthe firstrowof [ J] 1 and u ξ = N i ξ u i and u η = N i η u i The remaining strains ε y and ε xy are computed similarly The element stiffness matrix [ k] = B [ ] T [ E] dx dy= J dξdη [ B]dV = B [ ] T [ E] [ B]tJ dξdη
50 Gauss Quadrature The mapping approach requires us to be able to evaluate the integrations within the domain (-1 1) of the functions shown. Integration can be done analytically by using closed-form formulas from a table of integrals (Nah..) Or numerical integration can be performed Gauss quadrature is the more common form of numerical integration - better suited for numerical analysis and finite element method. It evaluated the integral of a function as a sum of a finite number of terms 1 I = φ dξ becomes I W i φ i 1 n i =1
51 Gauss Quadrature W i is the weight and φ i is the value of f(ξ=i)
52 Gauss Quadrature If φ=φ(ξ) is a polynomial function, then n-point Gauss quadrature yields the exact integral if φ is of degree 2n-1 or less. The form φ=c 1 +c 2 ξ is integrated exactly by the one point rule The form φ=c 1 +c 2 ξ+c 2 ξ 2 is integrated exactly by the two point rule And so on Use of an excessive number of points (more than that required) still yields the exact result If φ is not a polynomial, Gauss quadrature yields an approximate result. Accuracy improves as more Gauss points are used. Convergence toward the exact result may not be monotonic
53 Gauss Quadrature In two dimensions, integration is over a quadrilateral and a Gauss rule of order n uses n 2 points Where, W i W j is the product of one-dimensional weights. Usually m=n. If m = n = 1, φ is evaluated at ξ and η=0 and I=4φ 1 For Gauss rule of order 2 - need 2 2 =4 points For Gauss rule of order 3 - need 3 2 =9 points
54 Gauss Quadrature I φ 1 + φ 2 + φ 3 + φ 4 forruleof order =2 I (φ 1 + φ 3 + φ 7 + φ 9 ) (φ 2 + φ 4 + φ 6 + φ 8 ) φ 5
55 Number of Integration Points All the isoparametric solid elements are integrated numerically. Two schemes are offered: full integration and reduced integration. For the second-order elements Gauss integration is always used because it is efficient and it is especially suited to the polynomial product interpolations used in these elements. For the first-order elements the single-point reduced-integration scheme is based on the uniform strain formulation : the strains are not obtained at the first-order Gauss point but are obtained as the (analytically calculated) average strain over the element volume. The uniform strain method, first published by Flanagan and Belytschko (1981), ensures that the first-order reduced-integration elements pass the patch test and attain the accuracy when elements are skewed. Alternatively, the centroidal strain formulation, which uses 1-point Gauss integration to obtain the strains at the element center, is also available for the 8-node brick elements in ABAQUS/Explicit for improved computational efficiency.
56 Number of Integration Points The differences between the uniform strain formulation and the centroidal strain formulation can be shown as follows:
57 Number of Integration Points
58 Number of integration points Numerical integration is simpler than analytical, but it is not exact. [k] is only approximately integrated regardless of the number of integration points Should we use fewer integration points for quick computation Or more integration points to improve the accuracy of calculations. Hmm.
59 Reduced Integration A FE model is usually inexact, and usually it errs by being too stiff. Overstiffness is usually made worse by using more Gauss points to integrate element stiffness matrices because additional points capture more higher order terms in [k] These terms resist some deformation modes that lower order tems do not and therefore act to stiffen an element. On the other hand, use of too few Gauss points produces an even worse situation known as: instability, spurious singular mode, mechanics, zeroenergy, or hourglass mode. Instability occurs if one of more deformation modes happen to display zero strain at all Gauss points. If Gauss points sense no strain under a certain deformation mode, the resulting [k] will have no resistance to that deformation mode.
60 Reduced Integration Reduced integration usually means that an integration scheme one order less than the full scheme is used to integrate the element's internal forces and stiffness. Superficially this appears to be a poor approximation, but it has proved to offer significant advantages. For second-order elements in which the isoparametric coordinate lines remain orthogonal in the physical space, the reducedintegration points have the Barlow point property (Barlow, 1976): the strains are calculated from the interpolation functions with higher accuracy at these points than anywhere else in the element. For first-order elements the uniform strain method yields the exact average strain over the element volume. Not only is this important with respect to the values available for output, it is also significant when the constitutive model is nonlinear, since the strains passed into the constitutive routines are a better representation of the actual strains.
61 Reduced Integration Reduced integration decreases the number of constraints introduced by an element when there are internal constraints in the continuum theory being modeled, such as incompressibility, or the Kirchhoff transverse shear constraints if solid elements are used to analyze bending problems. In such applications fully integrated elements will lock they will exhibit response that is orders of magnitude too stiff, so the results they provide are quite unusable. The reduced-integration version of the same element will often work well in such cases. Reduced integration lowers the cost of forming an element. The deficiency of reduced integration is that the element stiffness matrix will be rank deficient. This most commonly exhibits itself in the appearance of singular modes ( hourglass modes ) in the response. These are nonphysical response modes that can grow in an unbounded way unless they are controlled.
62 Reduced Integration The reduced-integration second-order serendipity interpolation elements in two dimensions the 8-node quadrilaterals have one such mode, but it is benign because it cannot propagate in a mesh with more than one element. The second-order three-dimensional elements with reduced integration have modes that can propagate in a single stack of elements. Because these modes rarely cause trouble in the second-order elements, no special techniques are used in ABAQUS to control them. In contrast, when reduced integration is used in the first-order elements (the 4-node quadrilateral and the 8-node brick), hourglassing can often make the elements unusable unless it is controlled. In ABAQUS the artificial stiffness method given in Flanagan and Belytschko (1981) is used to control the hourglass modes in these elements.
63 Reduced Integration The FE model will have no resistance to loads that activate these modes. The stiffness matrix will be singular.
64 Reduced Integration Hourglass mode for 8-node element with reduced integration to four points This mode is typically non-communicable and will not occur in a set of elements.
65 Reduced Integration The hourglass control methods of Flanagan and Belytschko (1981) are generally successful for linear and mildly nonlinear problems but may break down in strongly nonlinear problems and, therefore, may not yield reasonable results. Success in controlling hourglassing also depends on the loads applied to the structure. For example, a point load is much more likely to trigger hourglassing than a distributed load. Hourglassing can be particularly troublesome in eigenvalue extraction problems: the low stiffness of the hourglass modes may create many unrealistic modes with low eigenfrequencies. Experience suggests that the reduced-integration, second-order isoparametric elements are the most cost-effective elements in ABAQUS for problems in which the solution can be expected to be smooth.
66 Solving Linear Equations Time independent FE analysis requires that the global equations [K]{D}={R} be solved for {D} This can be done by direct or iterative methods The direct method is usually some form of Gauss elimination. The number of operations required is dictated by the number of d.o.f. and the topology of [K] An iterative method requires an uncertain number of operations; calculations are halted when convergence criteria are satisfied or an iteration limit is reached.
67 Solving Linear Equations If a Gauss elimination is driven by node numbering, forward reduction proceeds in node number order and back substitution in reverse order, so that numerical values of d.o.f at first numbered node are determined last. If Gauss elimination is driven by element numbering, assembly of element matrices may alternate with steps of forward reduction. Some eliminations are carried out as soon as enough information has been assembled, then more assembly is carried out, then more eliminations, and so on The assembly-reduction process is like a wave that moves over the structure. A solver that works this way is called a wavefront or frontal equation solver.
68 Solving Linear Equations The computation time of a direct solution is roughly proportional to nb 2, where n is the order of [K] and b is the bandwidth. For 3D structures, the computation time becomes large because b becomes large. Large b indicates higher connectivity between the degrees of freedom. For such a case, an iterative solver may be better because connectivity speeds convergence.
69 Solving Linear Equations In most cases, the structure must be analyzed to determine the effects of several different load vectors {R}. This is done more effectively by direct solvers because most of the effort is expended to reduce the [K] matrix. As long as the structure [K] does not change, the displacements for the new load vectors can be estimated easily. This will be more difficult for iterative solvers, because the complete set of equations need to be re-solved for the new load vector. Iterative solvers may be best for parallel processing computers and nonlinear problems where the [K] matrix changes from step i to i+1. Particularly because the solution at step i will be a good initial estimate.
70 Symmetry conditions Types of symmetry include reflective, skew, axial and cyclic. If symmetry can be recognized and used, then the models can be made smaller. The problem is that not only the structure, but the boundary conditions and the loading needs to be symmetric too. The problem can be anti-symmetric If the problem is symmetric Translations have no component normal to a plane of symmetry Rotation vectors have no component parallel to a plane of symmetry.
71 Symmetry conditions Plane of Symmetry Plane of Anti-symmetry (Restrained Motions) (Restrained Motions)
72 Symmetry Conditions
73 Constraints Special conditions for the finite element model. A constraint equation has the general form [C]{D}-{Q}=0 Where [C] is an mxn matrix; m is the number of constraint equation, and n is the number of d.o.f. in the global vector {D} {Q} is a vector of constants and it is usually zero. There are two ways to impose the constraint equations on the global equation [K]{D}={R} Lagrange Multiplier Method Introduce additional variables known as Lagrange multipliers λ={λ 1 λ 2 λ 3 λ m } T Each constraint equation is written in homogenous form and multiplied by the corresponding λ I which yields the equation λ λ Τ {[C]{D} - {Q}}=0 Final Form K C T D C 0 λ = R Q Solved by Gaussian E lim ination
74 Constraints Penalty Method t=[c]{d}-{q} t=0 implies that the constraints have been satisfied α=[α 1 α 2 α 1 α m ] is the diagonal matrix of penalty numbers. Final form {[K]+[C] T [α][c]}{d}={r}+[c] T [α]{q} [C] T [α][c] is called the penalty matrix If a is zero, the constraints are ignored As a becomes large, the constraints are very nearly satisfied Penalty numbers that are too large produce numerical illconditioning, which may make the computed results unreliable and may lock the mesh. The penalty numbers must be large enough to be effective but not so large as to cause numerical difficulties
75 3D Solids and Solids of Revolution 3D solid - three-dimensional solid that is unrestricted as to the shape, loading, material properties, and boundary conditions. All six possible stresses (three normal and three shear) must be taken into account. The displacement field involves all three components (u, v, and w) Typical finite elements for 3D solids are tetrahedra and hexahedra, with three translational d.o.f. per node.
76 3D Solids
77 3D Solids Problems of beam bending, plane stress, plates and so on can all be regarded as special cases of 3D solids. Does this mean we can model everything using 3D finite element models? Can we just generalize everything as 3D and model using 3D finite elements. Not true! 3D models are very demanding in terms of computational time, and difficult to converge. They can be very stiff for several cases. More importantly, the 3D finite elements do not have rotational degrees of freedom, which are very important for situations like plates, shells, beams etc.
78 3D Solids Strain-displacement relationships
79 3D Solids Stress-strain-temperature relations
80 3D Solids The process for assembling the element stiffness matrix is the same as before. {u}=[n] {d} Where, [N] is the matrix of shape functions The nodes have three translational degrees of freedom. If n is the number of nodes, then [N] has 3n columns
81 3D Solids Substitution of {u}=[n]{d} into the strain-displacement relation yields the strain-displacement matrix [B] The element stiffness matrix takes the form:
82 3D Solid Elements Solid elements are direct extensions of plane elements discussed earlier. The extensions consist of adding another coordinate and displacement component. The behavior and limitations of specific 3D elements largely parallel those of their 2D counterparts. For example: Constant strain tetrahedron Linear strain tetrahedron Trilinear hexahedron Quadratic hexahedron Hmm Can you follow the names and relate them back to the planar elements
83 Pictures of solid elements 3D Solids CST LST Q4 Q8
84 3D Solids Constant Strain Tetrahedron. The element has three translational d.o.f. at each of its four nodes. A total of 12 d.o.f. In terms of generalized coordinates β i its displacement field is given by. Like the constant strain triangle, the constant strain tetrahedron is accurate only when strains are almost constant over the span of the element. The element is poor for bending and twisting specially if the axis passes through the element of close to it.
85 3D Solids Linear strain tetrahedron - This element has 10 nodes, each with 3 d.o.f., which is a total of 30 d.o.f. Its displacement field includes quadratic terms. Like the 6-node LST element, the 10-node tetrahedron element has linear strain distributions Trilinear tetrahedron - The element is also called an eightnode brick or continuum element. Each of three displacement expressions contains all modes in the expression (c 1 +c 2 x)(c 3 +c 4 y)(c 5 +c 6 z), which is the product of three linear polynomials
86 3D Solids The hexahedral element can be of arbitrary shape if it is formulated as an isoparametric element.
87 3D Solids The determinant J can be regarded as a scale factor. Here it expresses the volume ratio of the differential element dx dy dz to the dξ dη dζ The integration is performed numerically, usually by 2 x 2 x 2 Gauss quadrature rule. Like the bilinear quadrilateral (Q4) element, the trilinear tetrahedron does not model beam action well because the sides remain straight as the element deforms. If elongated it suffers from shear locking when bent. Remedy from locking - use incompatible modes - additional degress of freedom for the sides that allow them to curve
88 3D Solids Quadratic Hexahedron Direct extension of the quadratic quadrilateral Q8 element presented earlier. [B] is now a 6 x 60 rectangular matrix. If [k] is integrated by a 2 x 2 Gauss Quadrature rule, three hourglass instabilities will be possible. These hourglass instabilities can be communicated in 3D element models. Stabilization techniques are used in commercial FE packages. Their discussion is beyond the scope.
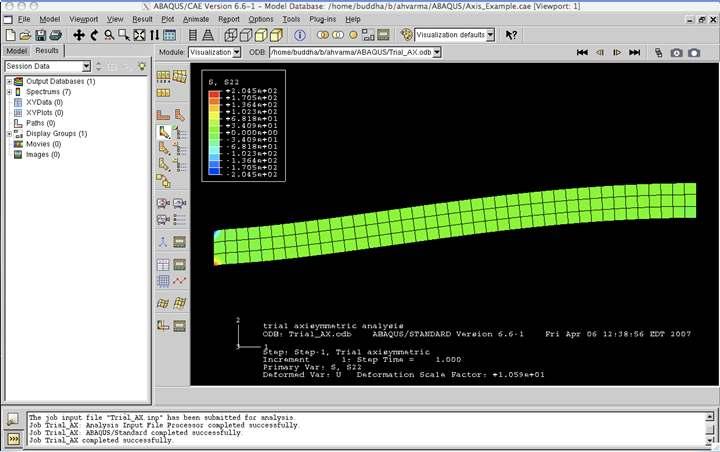
89 Example - Axisymmetric elements d 9 in. 123in. 1 ksi
90 Example
91 Example
92 Example
93 Example
94 Example
95 Example
96 Example
97 Example
98 Example
99 Example
100 Example
101
Bilinear Quadrilateral (Q4): CQUAD4 in GENESIS
: CQUAD4 in GENESIS") Bilinear Quadrilateral (Q4): CQUAD4 in GENESIS The Q4 element has four nodes and eight nodal dof. The shape can be any quadrilateral; we ll concentrate on a rectangle now. The displacement field in terms
Bilinear Quadrilateral (Q4): CQUAD4 in GENESIS The Q4 element has four nodes and eight nodal dof. The shape can be any quadrilateral; we ll concentrate on a rectangle now. The displacement field in terms
CRITERIA FOR SELECTION OF FEM MODELS.
 CRITERIA FOR SELECTION OF FEM MODELS. Prof. P. C.Vasani,Applied Mechanics Department, L. D. College of Engineering,Ahmedabad- 380015 Ph.(079) 7486320 [R] E-mail:pcv-im@eth.net 1. Criteria for Convergence.
CRITERIA FOR SELECTION OF FEM MODELS. Prof. P. C.Vasani,Applied Mechanics Department, L. D. College of Engineering,Ahmedabad- 380015 Ph.(079) 7486320 [R] E-mail:pcv-im@eth.net 1. Criteria for Convergence.
MAE 323: Chapter 6. Structural Models
 Common element types for structural analyis: oplane stress/strain, Axisymmetric obeam, truss,spring oplate/shell elements o3d solid ospecial: Usually used for contact or other constraints What you need
Common element types for structural analyis: oplane stress/strain, Axisymmetric obeam, truss,spring oplate/shell elements o3d solid ospecial: Usually used for contact or other constraints What you need
Interpolation Functions for General Element Formulation
 CHPTER 6 Interpolation Functions 6.1 INTRODUCTION The structural elements introduced in the previous chapters were formulated on the basis of known principles from elementary strength of materials theory.
CHPTER 6 Interpolation Functions 6.1 INTRODUCTION The structural elements introduced in the previous chapters were formulated on the basis of known principles from elementary strength of materials theory.
3. Numerical integration
 3. Numerical integration... 3. One-dimensional quadratures... 3. Two- and three-dimensional quadratures... 3.3 Exact Integrals for Straight Sided Triangles... 5 3.4 Reduced and Selected Integration...
3. Numerical integration... 3. One-dimensional quadratures... 3. Two- and three-dimensional quadratures... 3.3 Exact Integrals for Straight Sided Triangles... 5 3.4 Reduced and Selected Integration...
Using MATLAB and. Abaqus. Finite Element Analysis. Introduction to. Amar Khennane. Taylor & Francis Croup. Taylor & Francis Croup,
 Introduction to Finite Element Analysis Using MATLAB and Abaqus Amar Khennane Taylor & Francis Croup Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an informa business
Introduction to Finite Element Analysis Using MATLAB and Abaqus Amar Khennane Taylor & Francis Croup Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an informa business
Finite Element Method in Geotechnical Engineering
 Finite Element Method in Geotechnical Engineering Short Course on + Dynamics Boulder, Colorado January 5-8, 2004 Stein Sture Professor of Civil Engineering University of Colorado at Boulder Contents Steps
Finite Element Method in Geotechnical Engineering Short Course on + Dynamics Boulder, Colorado January 5-8, 2004 Stein Sture Professor of Civil Engineering University of Colorado at Boulder Contents Steps
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VI SEMESTER ME6603 FINITE ELEMENT ANALYSIS Regulation 013 SUBJECT YEAR /SEM: III
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VI SEMESTER ME6603 FINITE ELEMENT ANALYSIS Regulation 013 SUBJECT YEAR /SEM: III
General elastic beam with an elastic foundation
 General elastic beam with an elastic foundation Figure 1 shows a beam-column on an elastic foundation. The beam is connected to a continuous series of foundation springs. The other end of the foundation
General elastic beam with an elastic foundation Figure 1 shows a beam-column on an elastic foundation. The beam is connected to a continuous series of foundation springs. The other end of the foundation
CIVL4332 L1 Introduction to Finite Element Method
 CIVL L Introduction to Finite Element Method CIVL L Introduction to Finite Element Method by Joe Gattas, Faris Albermani Introduction The FEM is a numerical technique for solving physical problems such
CIVL L Introduction to Finite Element Method CIVL L Introduction to Finite Element Method by Joe Gattas, Faris Albermani Introduction The FEM is a numerical technique for solving physical problems such
Finite Element Method-Part II Isoparametric FE Formulation and some numerical examples Lecture 29 Smart and Micro Systems
 Finite Element Method-Part II Isoparametric FE Formulation and some numerical examples Lecture 29 Smart and Micro Systems Introduction Till now we dealt only with finite elements having straight edges.
Finite Element Method-Part II Isoparametric FE Formulation and some numerical examples Lecture 29 Smart and Micro Systems Introduction Till now we dealt only with finite elements having straight edges.
Chapter 6 2D Elements Plate Elements
 Institute of Structural Engineering Page 1 Chapter 6 2D Elements Plate Elements Method of Finite Elements I Institute of Structural Engineering Page 2 Continuum Elements Plane Stress Plane Strain Toda
Institute of Structural Engineering Page 1 Chapter 6 2D Elements Plate Elements Method of Finite Elements I Institute of Structural Engineering Page 2 Continuum Elements Plane Stress Plane Strain Toda
Quintic beam closed form matrices (revised 2/21, 2/23/12) General elastic beam with an elastic foundation
 General elastic beam with an elastic foundation") General elastic beam with an elastic foundation Figure 1 shows a beam-column on an elastic foundation. The beam is connected to a continuous series of foundation springs. The other end of the foundation
General elastic beam with an elastic foundation Figure 1 shows a beam-column on an elastic foundation. The beam is connected to a continuous series of foundation springs. The other end of the foundation
Finite element modelling of structural mechanics problems
 1 Finite element modelling of structural mechanics problems Kjell Magne Mathisen Department of Structural Engineering Norwegian University of Science and Technology Lecture 10: Geilo Winter School - January,
1 Finite element modelling of structural mechanics problems Kjell Magne Mathisen Department of Structural Engineering Norwegian University of Science and Technology Lecture 10: Geilo Winter School - January,
Common pitfalls while using FEM
 Common pitfalls while using FEM J. Pamin Instytut Technologii Informatycznych w Inżynierii Lądowej Wydział Inżynierii Lądowej, Politechnika Krakowska e-mail: JPamin@L5.pk.edu.pl With thanks to: R. de Borst
Common pitfalls while using FEM J. Pamin Instytut Technologii Informatycznych w Inżynierii Lądowej Wydział Inżynierii Lądowej, Politechnika Krakowska e-mail: JPamin@L5.pk.edu.pl With thanks to: R. de Borst
Chapter 12 Plate Bending Elements. Chapter 12 Plate Bending Elements
 CIVL 7/8117 Chapter 12 - Plate Bending Elements 1/34 Chapter 12 Plate Bending Elements Learning Objectives To introduce basic concepts of plate bending. To derive a common plate bending element stiffness
CIVL 7/8117 Chapter 12 - Plate Bending Elements 1/34 Chapter 12 Plate Bending Elements Learning Objectives To introduce basic concepts of plate bending. To derive a common plate bending element stiffness
BHAR AT HID AS AN ENGIN E ERI N G C O L L E G E NATTR A MPA LL I
 BHAR AT HID AS AN ENGIN E ERI N G C O L L E G E NATTR A MPA LL I 635 8 54. Third Year M E C H A NICAL VI S E M ES TER QUE S T I ON B ANK Subject: ME 6 603 FIN I T E E LE ME N T A N A L YSIS UNI T - I INTRODUCTION
BHAR AT HID AS AN ENGIN E ERI N G C O L L E G E NATTR A MPA LL I 635 8 54. Third Year M E C H A NICAL VI S E M ES TER QUE S T I ON B ANK Subject: ME 6 603 FIN I T E E LE ME N T A N A L YSIS UNI T - I INTRODUCTION
Aircraft Structures Kirchhoff-Love Plates
 University of Liège erospace & Mechanical Engineering ircraft Structures Kirchhoff-Love Plates Ludovic Noels Computational & Multiscale Mechanics of Materials CM3 http://www.ltas-cm3.ulg.ac.be/ Chemin
University of Liège erospace & Mechanical Engineering ircraft Structures Kirchhoff-Love Plates Ludovic Noels Computational & Multiscale Mechanics of Materials CM3 http://www.ltas-cm3.ulg.ac.be/ Chemin
Chapter 5 Structural Elements: The truss & beam elements
 Institute of Structural Engineering Page 1 Chapter 5 Structural Elements: The truss & beam elements Institute of Structural Engineering Page 2 Chapter Goals Learn how to formulate the Finite Element Equations
Institute of Structural Engineering Page 1 Chapter 5 Structural Elements: The truss & beam elements Institute of Structural Engineering Page 2 Chapter Goals Learn how to formulate the Finite Element Equations
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras. Module - 01 Lecture - 11
 Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Module - 01 Lecture - 11 Last class, what we did is, we looked at a method called superposition
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Module - 01 Lecture - 11 Last class, what we did is, we looked at a method called superposition
HIGHER-ORDER THEORIES
 HIGHER-ORDER THEORIES THIRD-ORDER SHEAR DEFORMATION PLATE THEORY LAYERWISE LAMINATE THEORY J.N. Reddy 1 Third-Order Shear Deformation Plate Theory Assumed Displacement Field µ u(x y z t) u 0 (x y t) +
HIGHER-ORDER THEORIES THIRD-ORDER SHEAR DEFORMATION PLATE THEORY LAYERWISE LAMINATE THEORY J.N. Reddy 1 Third-Order Shear Deformation Plate Theory Assumed Displacement Field µ u(x y z t) u 0 (x y t) +
Contents as of 12/8/2017. Preface. 1. Overview...1
 Contents as of 12/8/2017 Preface 1. Overview...1 1.1 Introduction...1 1.2 Finite element data...1 1.3 Matrix notation...3 1.4 Matrix partitions...8 1.5 Special finite element matrix notations...9 1.6 Finite
Contents as of 12/8/2017 Preface 1. Overview...1 1.1 Introduction...1 1.2 Finite element data...1 1.3 Matrix notation...3 1.4 Matrix partitions...8 1.5 Special finite element matrix notations...9 1.6 Finite
Back Matter Index The McGraw Hill Companies, 2004
 INDEX A Absolute viscosity, 294 Active zone, 468 Adjoint, 452 Admissible functions, 132 Air, 294 ALGOR, 12 Amplitude, 389, 391 Amplitude ratio, 396 ANSYS, 12 Applications fluid mechanics, 293 326. See
INDEX A Absolute viscosity, 294 Active zone, 468 Adjoint, 452 Admissible functions, 132 Air, 294 ALGOR, 12 Amplitude, 389, 391 Amplitude ratio, 396 ANSYS, 12 Applications fluid mechanics, 293 326. See
Thick Shell Element Form 5 in LS-DYNA
 Thick Shell Element Form 5 in LS-DYNA Lee P. Bindeman Livermore Software Technology Corporation Thick shell form 5 in LS-DYNA is a layered node brick element, with nodes defining the boom surface and defining
Thick Shell Element Form 5 in LS-DYNA Lee P. Bindeman Livermore Software Technology Corporation Thick shell form 5 in LS-DYNA is a layered node brick element, with nodes defining the boom surface and defining
 Code No: RT41033 R13 Set No. 1 IV B.Tech I Semester Regular Examinations, November - 2016 FINITE ELEMENT METHODS (Common to Mechanical Engineering, Aeronautical Engineering and Automobile Engineering)
Code No: RT41033 R13 Set No. 1 IV B.Tech I Semester Regular Examinations, November - 2016 FINITE ELEMENT METHODS (Common to Mechanical Engineering, Aeronautical Engineering and Automobile Engineering)
HIGHER-ORDER THEORIES
 HIGHER-ORDER THEORIES Third-order Shear Deformation Plate Theory Displacement and strain fields Equations of motion Navier s solution for bending Layerwise Laminate Theory Interlaminar stress and strain
HIGHER-ORDER THEORIES Third-order Shear Deformation Plate Theory Displacement and strain fields Equations of motion Navier s solution for bending Layerwise Laminate Theory Interlaminar stress and strain
Discontinuous Galerkin methods for nonlinear elasticity
 Discontinuous Galerkin methods for nonlinear elasticity Preprint submitted to lsevier Science 8 January 2008 The goal of this paper is to introduce Discontinuous Galerkin (DG) methods for nonlinear elasticity
Discontinuous Galerkin methods for nonlinear elasticity Preprint submitted to lsevier Science 8 January 2008 The goal of this paper is to introduce Discontinuous Galerkin (DG) methods for nonlinear elasticity
Introduction. Finite and Spectral Element Methods Using MATLAB. Second Edition. C. Pozrikidis. University of Massachusetts Amherst, USA
 Introduction to Finite and Spectral Element Methods Using MATLAB Second Edition C. Pozrikidis University of Massachusetts Amherst, USA (g) CRC Press Taylor & Francis Group Boca Raton London New York CRC
Introduction to Finite and Spectral Element Methods Using MATLAB Second Edition C. Pozrikidis University of Massachusetts Amherst, USA (g) CRC Press Taylor & Francis Group Boca Raton London New York CRC
FLEXIBILITY METHOD FOR INDETERMINATE FRAMES
 UNIT - I FLEXIBILITY METHOD FOR INDETERMINATE FRAMES 1. What is meant by indeterminate structures? Structures that do not satisfy the conditions of equilibrium are called indeterminate structure. These
UNIT - I FLEXIBILITY METHOD FOR INDETERMINATE FRAMES 1. What is meant by indeterminate structures? Structures that do not satisfy the conditions of equilibrium are called indeterminate structure. These
MITOCW MITRES2_002S10linear_lec07_300k-mp4
 MITOCW MITRES2_002S10linear_lec07_300k-mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources
MITOCW MITRES2_002S10linear_lec07_300k-mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources
EML4507 Finite Element Analysis and Design EXAM 1
 2-17-15 Name (underline last name): EML4507 Finite Element Analysis and Design EXAM 1 In this exam you may not use any materials except a pencil or a pen, an 8.5x11 formula sheet, and a calculator. Whenever
2-17-15 Name (underline last name): EML4507 Finite Element Analysis and Design EXAM 1 In this exam you may not use any materials except a pencil or a pen, an 8.5x11 formula sheet, and a calculator. Whenever
Static & Dynamic. Analysis of Structures. Edward L.Wilson. University of California, Berkeley. Fourth Edition. Professor Emeritus of Civil Engineering
 Static & Dynamic Analysis of Structures A Physical Approach With Emphasis on Earthquake Engineering Edward LWilson Professor Emeritus of Civil Engineering University of California, Berkeley Fourth Edition
Static & Dynamic Analysis of Structures A Physical Approach With Emphasis on Earthquake Engineering Edward LWilson Professor Emeritus of Civil Engineering University of California, Berkeley Fourth Edition
Institute of Structural Engineering Page 1. Method of Finite Elements I. Chapter 2. The Direct Stiffness Method. Method of Finite Elements I
 Institute of Structural Engineering Page 1 Chapter 2 The Direct Stiffness Method Institute of Structural Engineering Page 2 Direct Stiffness Method (DSM) Computational method for structural analysis Matrix
Institute of Structural Engineering Page 1 Chapter 2 The Direct Stiffness Method Institute of Structural Engineering Page 2 Direct Stiffness Method (DSM) Computational method for structural analysis Matrix
Applications of Eigenvalues & Eigenvectors
 Applications of Eigenvalues & Eigenvectors Louie L. Yaw Walla Walla University Engineering Department For Linear Algebra Class November 17, 214 Outline 1 The eigenvalue/eigenvector problem 2 Principal
Applications of Eigenvalues & Eigenvectors Louie L. Yaw Walla Walla University Engineering Department For Linear Algebra Class November 17, 214 Outline 1 The eigenvalue/eigenvector problem 2 Principal
Lecture 8. Stress Strain in Multi-dimension
 Lecture 8. Stress Strain in Multi-dimension Module. General Field Equations General Field Equations [] Equilibrium Equations in Elastic bodies xx x y z yx zx f x 0, etc [2] Kinematics xx u x x,etc. [3]
Lecture 8. Stress Strain in Multi-dimension Module. General Field Equations General Field Equations [] Equilibrium Equations in Elastic bodies xx x y z yx zx f x 0, etc [2] Kinematics xx u x x,etc. [3]
ME 1401 FINITE ELEMENT ANALYSIS UNIT I PART -A. 2. Why polynomial type of interpolation functions is mostly used in FEM?
 SHRI ANGALAMMAN COLLEGE OF ENGINEERING AND TECHNOLOGY (An ISO 9001:2008 Certified Institution) SIRUGANOOR, TIRUCHIRAPPALLI 621 105 Department of Mechanical Engineering ME 1401 FINITE ELEMENT ANALYSIS 1.
SHRI ANGALAMMAN COLLEGE OF ENGINEERING AND TECHNOLOGY (An ISO 9001:2008 Certified Institution) SIRUGANOOR, TIRUCHIRAPPALLI 621 105 Department of Mechanical Engineering ME 1401 FINITE ELEMENT ANALYSIS 1.
Review of Strain Energy Methods and Introduction to Stiffness Matrix Methods of Structural Analysis
 uke University epartment of Civil and Environmental Engineering CEE 42L. Matrix Structural Analysis Henri P. Gavin Fall, 22 Review of Strain Energy Methods and Introduction to Stiffness Matrix Methods
uke University epartment of Civil and Environmental Engineering CEE 42L. Matrix Structural Analysis Henri P. Gavin Fall, 22 Review of Strain Energy Methods and Introduction to Stiffness Matrix Methods
PREPRINT 2010:23. A nonconforming rotated Q 1 approximation on tetrahedra PETER HANSBO
 PREPRINT 2010:23 A nonconforming rotated Q 1 approximation on tetrahedra PETER HANSBO Department of Mathematical Sciences Division of Mathematics CHALMERS UNIVERSITY OF TECHNOLOGY UNIVERSITY OF GOTHENBURG
PREPRINT 2010:23 A nonconforming rotated Q 1 approximation on tetrahedra PETER HANSBO Department of Mathematical Sciences Division of Mathematics CHALMERS UNIVERSITY OF TECHNOLOGY UNIVERSITY OF GOTHENBURG
Esben Byskov. Elementary Continuum. Mechanics for Everyone. With Applications to Structural Mechanics. Springer
 Esben Byskov Elementary Continuum Mechanics for Everyone With Applications to Structural Mechanics Springer Contents Preface v Contents ix Introduction What Is Continuum Mechanics? "I Need Continuum Mechanics
Esben Byskov Elementary Continuum Mechanics for Everyone With Applications to Structural Mechanics Springer Contents Preface v Contents ix Introduction What Is Continuum Mechanics? "I Need Continuum Mechanics
Finite Element Method
 Finite Element Method Finite Element Method (ENGC 6321) Syllabus Objectives Understand the basic theory of the FEM Know the behaviour and usage of each type of elements covered in this course one dimensional
Finite Element Method Finite Element Method (ENGC 6321) Syllabus Objectives Understand the basic theory of the FEM Know the behaviour and usage of each type of elements covered in this course one dimensional
Institute of Structural Engineering Page 1. Method of Finite Elements I. Chapter 2. The Direct Stiffness Method. Method of Finite Elements I
 Institute of Structural Engineering Page 1 Chapter 2 The Direct Stiffness Method Institute of Structural Engineering Page 2 Direct Stiffness Method (DSM) Computational method for structural analysis Matrix
Institute of Structural Engineering Page 1 Chapter 2 The Direct Stiffness Method Institute of Structural Engineering Page 2 Direct Stiffness Method (DSM) Computational method for structural analysis Matrix
International Journal of Advanced Engineering Technology E-ISSN
 Research Article INTEGRATED FORCE METHOD FOR FIBER REINFORCED COMPOSITE PLATE BENDING PROBLEMS Doiphode G. S., Patodi S. C.* Address for Correspondence Assistant Professor, Applied Mechanics Department,
Research Article INTEGRATED FORCE METHOD FOR FIBER REINFORCED COMPOSITE PLATE BENDING PROBLEMS Doiphode G. S., Patodi S. C.* Address for Correspondence Assistant Professor, Applied Mechanics Department,
A HIGHER-ORDER BEAM THEORY FOR COMPOSITE BOX BEAMS
 A HIGHER-ORDER BEAM THEORY FOR COMPOSITE BOX BEAMS A. Kroker, W. Becker TU Darmstadt, Department of Mechanical Engineering, Chair of Structural Mechanics Hochschulstr. 1, D-64289 Darmstadt, Germany kroker@mechanik.tu-darmstadt.de,
A HIGHER-ORDER BEAM THEORY FOR COMPOSITE BOX BEAMS A. Kroker, W. Becker TU Darmstadt, Department of Mechanical Engineering, Chair of Structural Mechanics Hochschulstr. 1, D-64289 Darmstadt, Germany kroker@mechanik.tu-darmstadt.de,
3. BEAMS: STRAIN, STRESS, DEFLECTIONS
 3. BEAMS: STRAIN, STRESS, DEFLECTIONS The beam, or flexural member, is frequently encountered in structures and machines, and its elementary stress analysis constitutes one of the more interesting facets
3. BEAMS: STRAIN, STRESS, DEFLECTIONS The beam, or flexural member, is frequently encountered in structures and machines, and its elementary stress analysis constitutes one of the more interesting facets
Triangular Plate Displacement Elements
 Triangular Plate Displacement Elements Chapter : TRIANGULAR PLATE DISPLACEMENT ELEMENTS TABLE OF CONTENTS Page. Introduction...................... Triangular Element Properties................ Triangle
Triangular Plate Displacement Elements Chapter : TRIANGULAR PLATE DISPLACEMENT ELEMENTS TABLE OF CONTENTS Page. Introduction...................... Triangular Element Properties................ Triangle
Geometry-dependent MITC method for a 2-node iso-beam element
 Structural Engineering and Mechanics, Vol. 9, No. (8) 3-3 Geometry-dependent MITC method for a -node iso-beam element Phill-Seung Lee Samsung Heavy Industries, Seocho, Seoul 37-857, Korea Hyu-Chun Noh
Structural Engineering and Mechanics, Vol. 9, No. (8) 3-3 Geometry-dependent MITC method for a -node iso-beam element Phill-Seung Lee Samsung Heavy Industries, Seocho, Seoul 37-857, Korea Hyu-Chun Noh
COMPUTATIONAL ELASTICITY
 COMPUTATIONAL ELASTICITY Theory of Elasticity and Finite and Boundary Element Methods Mohammed Ameen Alpha Science International Ltd. Harrow, U.K. Contents Preface Notation vii xi PART A: THEORETICAL ELASTICITY
COMPUTATIONAL ELASTICITY Theory of Elasticity and Finite and Boundary Element Methods Mohammed Ameen Alpha Science International Ltd. Harrow, U.K. Contents Preface Notation vii xi PART A: THEORETICAL ELASTICITY
3 2 6 Solve the initial value problem u ( t) 3. a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1
 3. a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1") Math Problem a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1 3 6 Solve the initial value problem u ( t) = Au( t) with u (0) =. 3 1 u 1 =, u 1 3 = b- True or false and why 1. if A is
Math Problem a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1 3 6 Solve the initial value problem u ( t) = Au( t) with u (0) =. 3 1 u 1 =, u 1 3 = b- True or false and why 1. if A is
The Finite Element Method for Solid and Structural Mechanics
 The Finite Element Method for Solid and Structural Mechanics Sixth edition O.C. Zienkiewicz, CBE, FRS UNESCO Professor of Numerical Methods in Engineering International Centre for Numerical Methods in
The Finite Element Method for Solid and Structural Mechanics Sixth edition O.C. Zienkiewicz, CBE, FRS UNESCO Professor of Numerical Methods in Engineering International Centre for Numerical Methods in
UNIVERSITY OF SASKATCHEWAN ME MECHANICS OF MATERIALS I FINAL EXAM DECEMBER 13, 2008 Professor A. Dolovich
 UNIVERSITY OF SASKATCHEWAN ME 313.3 MECHANICS OF MATERIALS I FINAL EXAM DECEMBER 13, 2008 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS For Marker s Use Only LAST NAME (printed): FIRST
UNIVERSITY OF SASKATCHEWAN ME 313.3 MECHANICS OF MATERIALS I FINAL EXAM DECEMBER 13, 2008 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS For Marker s Use Only LAST NAME (printed): FIRST
Stress, Strain, Mohr s Circle
 Stress, Strain, Mohr s Circle The fundamental quantities in solid mechanics are stresses and strains. In accordance with the continuum mechanics assumption, the molecular structure of materials is neglected
Stress, Strain, Mohr s Circle The fundamental quantities in solid mechanics are stresses and strains. In accordance with the continuum mechanics assumption, the molecular structure of materials is neglected
NONLINEAR CONTINUUM FORMULATIONS CONTENTS
 NONLINEAR CONTINUUM FORMULATIONS CONTENTS Introduction to nonlinear continuum mechanics Descriptions of motion Measures of stresses and strains Updated and Total Lagrangian formulations Continuum shell
NONLINEAR CONTINUUM FORMULATIONS CONTENTS Introduction to nonlinear continuum mechanics Descriptions of motion Measures of stresses and strains Updated and Total Lagrangian formulations Continuum shell
Structural Dynamics Lecture Eleven: Dynamic Response of MDOF Systems: (Chapter 11) By: H. Ahmadian
 By: H. Ahmadian") Structural Dynamics Lecture Eleven: Dynamic Response of MDOF Systems: (Chapter 11) By: H. Ahmadian ahmadian@iust.ac.ir Dynamic Response of MDOF Systems: Mode-Superposition Method Mode-Superposition Method:
Structural Dynamics Lecture Eleven: Dynamic Response of MDOF Systems: (Chapter 11) By: H. Ahmadian ahmadian@iust.ac.ir Dynamic Response of MDOF Systems: Mode-Superposition Method Mode-Superposition Method:
Nonconservative Loading: Overview
 35 Nonconservative Loading: Overview 35 Chapter 35: NONCONSERVATIVE LOADING: OVERVIEW TABLE OF CONTENTS Page 35. Introduction..................... 35 3 35.2 Sources...................... 35 3 35.3 Three
35 Nonconservative Loading: Overview 35 Chapter 35: NONCONSERVATIVE LOADING: OVERVIEW TABLE OF CONTENTS Page 35. Introduction..................... 35 3 35.2 Sources...................... 35 3 35.3 Three
Measurement of deformation. Measurement of elastic force. Constitutive law. Finite element method
 Deformable Bodies Deformation x p(x) Given a rest shape x and its deformed configuration p(x), how large is the internal restoring force f(p)? To answer this question, we need a way to measure deformation
Deformable Bodies Deformation x p(x) Given a rest shape x and its deformed configuration p(x), how large is the internal restoring force f(p)? To answer this question, we need a way to measure deformation
7. Hierarchical modeling examples
 7. Hierarchical modeling examples The objective of this chapter is to apply the hierarchical modeling approach discussed in Chapter 1 to three selected problems using the mathematical models studied in
7. Hierarchical modeling examples The objective of this chapter is to apply the hierarchical modeling approach discussed in Chapter 1 to three selected problems using the mathematical models studied in
Unit 13 Review of Simple Beam Theory
 MIT - 16.0 Fall, 00 Unit 13 Review of Simple Beam Theory Readings: Review Unified Engineering notes on Beam Theory BMP 3.8, 3.9, 3.10 T & G 10-15 Paul A. Lagace, Ph.D. Professor of Aeronautics & Astronautics
MIT - 16.0 Fall, 00 Unit 13 Review of Simple Beam Theory Readings: Review Unified Engineering notes on Beam Theory BMP 3.8, 3.9, 3.10 T & G 10-15 Paul A. Lagace, Ph.D. Professor of Aeronautics & Astronautics
A study of moderately thick quadrilateral plate elements based on the absolute nodal coordinate formulation
 Multibody Syst Dyn (2014) 31:309 338 DOI 10.1007/s11044-013-9383-6 A study of moderately thick quadrilateral plate elements based on the absolute nodal coordinate formulation Marko K. Matikainen Antti
Multibody Syst Dyn (2014) 31:309 338 DOI 10.1007/s11044-013-9383-6 A study of moderately thick quadrilateral plate elements based on the absolute nodal coordinate formulation Marko K. Matikainen Antti
FEM MODEL OF BIOT S EQUATION FREE FROM VOLUME LOCKING AND HOURGLASS INSTABILITY
 he 14 th World Conference on Earthquake Engineering FEM MODEL OF BIO S EQUAION FREE FROM OLUME LOCKING AND HOURGLASS INSABILIY Y. Ohya 1 and N. Yoshida 2 1 PhD Student, Dept. of Civil and Environmental
he 14 th World Conference on Earthquake Engineering FEM MODEL OF BIO S EQUAION FREE FROM OLUME LOCKING AND HOURGLASS INSABILIY Y. Ohya 1 and N. Yoshida 2 1 PhD Student, Dept. of Civil and Environmental
Consider an elastic spring as shown in the Fig.2.4. When the spring is slowly
 .3 Strain Energy Consider an elastic spring as shown in the Fig..4. When the spring is slowly pulled, it deflects by a small amount u 1. When the load is removed from the spring, it goes back to the original
.3 Strain Energy Consider an elastic spring as shown in the Fig..4. When the spring is slowly pulled, it deflects by a small amount u 1. When the load is removed from the spring, it goes back to the original
M5 Simple Beam Theory (continued)
") M5 Simple Beam Theory (continued) Reading: Crandall, Dahl and Lardner 7.-7.6 In the previous lecture we had reached the point of obtaining 5 equations, 5 unknowns by application of equations of elasticity
M5 Simple Beam Theory (continued) Reading: Crandall, Dahl and Lardner 7.-7.6 In the previous lecture we had reached the point of obtaining 5 equations, 5 unknowns by application of equations of elasticity
ME FINITE ELEMENT ANALYSIS FORMULAS
 ME 2353 - FINITE ELEMENT ANALYSIS FORMULAS UNIT I FINITE ELEMENT FORMULATION OF BOUNDARY VALUE PROBLEMS 01. Global Equation for Force Vector, {F} = [K] {u} {F} = Global Force Vector [K] = Global Stiffness
ME 2353 - FINITE ELEMENT ANALYSIS FORMULAS UNIT I FINITE ELEMENT FORMULATION OF BOUNDARY VALUE PROBLEMS 01. Global Equation for Force Vector, {F} = [K] {u} {F} = Global Force Vector [K] = Global Stiffness
PEAT SEISMOLOGY Lecture 2: Continuum mechanics
 PEAT8002 - SEISMOLOGY Lecture 2: Continuum mechanics Nick Rawlinson Research School of Earth Sciences Australian National University Strain Strain is the formal description of the change in shape of a
PEAT8002 - SEISMOLOGY Lecture 2: Continuum mechanics Nick Rawlinson Research School of Earth Sciences Australian National University Strain Strain is the formal description of the change in shape of a
Introduction to Finite Element Method
 Introduction to Finite Element Method Dr. Rakesh K Kapania Aerospace and Ocean Engineering Department Virginia Polytechnic Institute and State University, Blacksburg, VA AOE 524, Vehicle Structures Summer,
Introduction to Finite Element Method Dr. Rakesh K Kapania Aerospace and Ocean Engineering Department Virginia Polytechnic Institute and State University, Blacksburg, VA AOE 524, Vehicle Structures Summer,
3D Elasticity Theory
 3D lasticity Theory Many structural analysis problems are analysed using the theory of elasticity in which Hooke s law is used to enforce proportionality between stress and strain at any deformation level.
3D lasticity Theory Many structural analysis problems are analysed using the theory of elasticity in which Hooke s law is used to enforce proportionality between stress and strain at any deformation level.
IV B.Tech. I Semester Supplementary Examinations, February/March FINITE ELEMENT METHODS (Mechanical Engineering) Time: 3 Hours Max Marks: 80
 Time: 3 Hours Max Marks: 80") www..com www..com Code No: M0322/R07 Set No. 1 IV B.Tech. I Semester Supplementary Examinations, February/March - 2011 FINITE ELEMENT METHODS (Mechanical Engineering) Time: 3 Hours Max Marks: 80 Answer
www..com www..com Code No: M0322/R07 Set No. 1 IV B.Tech. I Semester Supplementary Examinations, February/March - 2011 FINITE ELEMENT METHODS (Mechanical Engineering) Time: 3 Hours Max Marks: 80 Answer
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras. Module - 01 Lecture - 13
 Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras (Refer Slide Time: 00:25) Module - 01 Lecture - 13 In the last class, we have seen how
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras (Refer Slide Time: 00:25) Module - 01 Lecture - 13 In the last class, we have seen how
CHAPTER 14 BUCKLING ANALYSIS OF 1D AND 2D STRUCTURES
 CHAPTER 14 BUCKLING ANALYSIS OF 1D AND 2D STRUCTURES 14.1 GENERAL REMARKS In structures where dominant loading is usually static, the most common cause of the collapse is a buckling failure. Buckling may
CHAPTER 14 BUCKLING ANALYSIS OF 1D AND 2D STRUCTURES 14.1 GENERAL REMARKS In structures where dominant loading is usually static, the most common cause of the collapse is a buckling failure. Buckling may
Discrete Analysis for Plate Bending Problems by Using Hybrid-type Penalty Method
 131 Bulletin of Research Center for Computing and Multimedia Studies, Hosei University, 21 (2008) Published online (http://hdl.handle.net/10114/1532) Discrete Analysis for Plate Bending Problems by Using
131 Bulletin of Research Center for Computing and Multimedia Studies, Hosei University, 21 (2008) Published online (http://hdl.handle.net/10114/1532) Discrete Analysis for Plate Bending Problems by Using
SEMM Mechanics PhD Preliminary Exam Spring Consider a two-dimensional rigid motion, whose displacement field is given by
 SEMM Mechanics PhD Preliminary Exam Spring 2014 1. Consider a two-dimensional rigid motion, whose displacement field is given by u(x) = [cos(β)x 1 + sin(β)x 2 X 1 ]e 1 + [ sin(β)x 1 + cos(β)x 2 X 2 ]e
SEMM Mechanics PhD Preliminary Exam Spring 2014 1. Consider a two-dimensional rigid motion, whose displacement field is given by u(x) = [cos(β)x 1 + sin(β)x 2 X 1 ]e 1 + [ sin(β)x 1 + cos(β)x 2 X 2 ]e
Mechanics of Materials and Structures
 Journal of Mechanics of Materials and Structures IMPROVED HYBRID ELEMENTS FOR STRUCTURAL ANALYSIS C. S. Jog Volume 5, No. 3 March 2010 mathematical sciences publishers JOURNAL OF MECHANICS OF MATERIALS
Journal of Mechanics of Materials and Structures IMPROVED HYBRID ELEMENTS FOR STRUCTURAL ANALYSIS C. S. Jog Volume 5, No. 3 March 2010 mathematical sciences publishers JOURNAL OF MECHANICS OF MATERIALS
Solution of Matrix Eigenvalue Problem
 Outlines October 12, 2004 Outlines Part I: Review of Previous Lecture Part II: Review of Previous Lecture Outlines Part I: Review of Previous Lecture Part II: Standard Matrix Eigenvalue Problem Other Forms
Outlines October 12, 2004 Outlines Part I: Review of Previous Lecture Part II: Review of Previous Lecture Outlines Part I: Review of Previous Lecture Part II: Standard Matrix Eigenvalue Problem Other Forms
ABHELSINKI UNIVERSITY OF TECHNOLOGY
 ABHELSINKI UNIVERSITY OF TECHNOLOGY TECHNISCHE UNIVERSITÄT HELSINKI UNIVERSITE DE TECHNOLOGIE D HELSINKI A posteriori error analysis for the Morley plate element Jarkko Niiranen Department of Structural
ABHELSINKI UNIVERSITY OF TECHNOLOGY TECHNISCHE UNIVERSITÄT HELSINKI UNIVERSITE DE TECHNOLOGIE D HELSINKI A posteriori error analysis for the Morley plate element Jarkko Niiranen Department of Structural
UNCONVENTIONAL FINITE ELEMENT MODELS FOR NONLINEAR ANALYSIS OF BEAMS AND PLATES
 UNCONVENTIONAL FINITE ELEMENT MODELS FOR NONLINEAR ANALYSIS OF BEAMS AND PLATES A Thesis by WOORAM KIM Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the
UNCONVENTIONAL FINITE ELEMENT MODELS FOR NONLINEAR ANALYSIS OF BEAMS AND PLATES A Thesis by WOORAM KIM Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the
Chapter 10 INTEGRATION METHODS Introduction Unit Coordinate Integration
 Chapter 0 INTEGRATION METHODS 0. Introduction The finite element analysis techniques are always based on an integral formulation. At the very minimum it will always be necessary to integrate at least an
Chapter 0 INTEGRATION METHODS 0. Introduction The finite element analysis techniques are always based on an integral formulation. At the very minimum it will always be necessary to integrate at least an
MITOCW MITRES2_002S10nonlinear_lec20_300k-mp4
 MITOCW MITRES2_002S10nonlinear_lec20_300k-mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high-quality educational resources
MITOCW MITRES2_002S10nonlinear_lec20_300k-mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high-quality educational resources
Theoretical Manual Theoretical background to the Strand7 finite element analysis system
 Theoretical Manual Theoretical background to the Strand7 finite element analysis system Edition 1 January 2005 Strand7 Release 2.3 2004-2005 Strand7 Pty Limited All rights reserved Contents Preface Chapter
Theoretical Manual Theoretical background to the Strand7 finite element analysis system Edition 1 January 2005 Strand7 Release 2.3 2004-2005 Strand7 Pty Limited All rights reserved Contents Preface Chapter
Strain Transformation equations
 Strain Transformation equations R. Chandramouli Associate Dean-Research SASTRA University, Thanjavur-613 401 Joint Initiative of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents 1. Stress transformation
Strain Transformation equations R. Chandramouli Associate Dean-Research SASTRA University, Thanjavur-613 401 Joint Initiative of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents 1. Stress transformation
Chapter 11 Three-Dimensional Stress Analysis. Chapter 11 Three-Dimensional Stress Analysis
 CIVL 7/87 Chapter - /39 Chapter Learning Objectives To introduce concepts of three-dimensional stress and strain. To develop the tetrahedral solid-element stiffness matri. To describe how bod and surface
CIVL 7/87 Chapter - /39 Chapter Learning Objectives To introduce concepts of three-dimensional stress and strain. To develop the tetrahedral solid-element stiffness matri. To describe how bod and surface
. D CR Nomenclature D 1
 . D CR Nomenclature D 1 Appendix D: CR NOMENCLATURE D 2 The notation used by different investigators working in CR formulations has not coalesced, since the topic is in flux. This Appendix identifies the
. D CR Nomenclature D 1 Appendix D: CR NOMENCLATURE D 2 The notation used by different investigators working in CR formulations has not coalesced, since the topic is in flux. This Appendix identifies the
DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI DEPARTMENT OF MECHANICAL ENGINEERING ME 6603 FINITE ELEMENT ANALYSIS PART A (2 MARKS)
") DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI DEPARTMENT OF MECHANICAL ENGINEERING ME 6603 FINITE ELEMENT ANALYSIS UNIT I : FINITE ELEMENT FORMULATION OF BOUNDARY VALUE PART A (2 MARKS) 1. Write the types
DHANALAKSHMI COLLEGE OF ENGINEERING, CHENNAI DEPARTMENT OF MECHANICAL ENGINEERING ME 6603 FINITE ELEMENT ANALYSIS UNIT I : FINITE ELEMENT FORMULATION OF BOUNDARY VALUE PART A (2 MARKS) 1. Write the types
12. Stresses and Strains
 12. Stresses and Strains Finite Element Method Differential Equation Weak Formulation Approximating Functions Weighted Residuals FEM - Formulation Classification of Problems Scalar Vector 1-D T(x) u(x)
12. Stresses and Strains Finite Element Method Differential Equation Weak Formulation Approximating Functions Weighted Residuals FEM - Formulation Classification of Problems Scalar Vector 1-D T(x) u(x)
Computational Stiffness Method
 Computational Stiffness Method Hand calculations are central in the classical stiffness method. In that approach, the stiffness matrix is established column-by-column by setting the degrees of freedom
Computational Stiffness Method Hand calculations are central in the classical stiffness method. In that approach, the stiffness matrix is established column-by-column by setting the degrees of freedom
Prepared by M. GUNASHANKAR AP/MECH DEPARTMENT OF MECHANICAL ENGINEERING
 CHETTINAD COLLEGE OF ENGINEERING AND TECHNOLOGY-KARUR FINITE ELEMENT ANALYSIS 2 MARKS QUESTIONS WITH ANSWER Prepared by M. GUNASHANKAR AP/MECH DEPARTMENT OF MECHANICAL ENGINEERING FINITE ELEMENT ANALYSIS
CHETTINAD COLLEGE OF ENGINEERING AND TECHNOLOGY-KARUR FINITE ELEMENT ANALYSIS 2 MARKS QUESTIONS WITH ANSWER Prepared by M. GUNASHANKAR AP/MECH DEPARTMENT OF MECHANICAL ENGINEERING FINITE ELEMENT ANALYSIS
202 Index. failure, 26 field equation, 122 force, 1
 Index acceleration, 12, 161 admissible function, 155 admissible stress, 32 Airy's stress function, 122, 124 d'alembert's principle, 165, 167, 177 amplitude, 171 analogy, 76 anisotropic material, 20 aperiodic
Index acceleration, 12, 161 admissible function, 155 admissible stress, 32 Airy's stress function, 122, 124 d'alembert's principle, 165, 167, 177 amplitude, 171 analogy, 76 anisotropic material, 20 aperiodic
UNIVERSITY OF HAWAII COLLEGE OF ENGINEERING DEPARTMENT OF CIVIL AND ENVIRONMENTAL ENGINEERING
 UNIVERSITY OF HAWAII COLLEGE OF ENGINEERING DEPARTMENT OF CIVIL AND ENVIRONMENTAL ENGINEERING ACKNOWLEDGMENTS This report consists of the dissertation by Ms. Yan Jane Liu, submitted in partial fulfillment
UNIVERSITY OF HAWAII COLLEGE OF ENGINEERING DEPARTMENT OF CIVIL AND ENVIRONMENTAL ENGINEERING ACKNOWLEDGMENTS This report consists of the dissertation by Ms. Yan Jane Liu, submitted in partial fulfillment
Content. Department of Mathematics University of Oslo
 Chapter: 1 MEK4560 The Finite Element Method in Solid Mechanics II (January 25, 2008) (E-post:torgeiru@math.uio.no) Page 1 of 14 Content 1 Introduction to MEK4560 3 1.1 Minimum Potential energy..............................
Chapter: 1 MEK4560 The Finite Element Method in Solid Mechanics II (January 25, 2008) (E-post:torgeiru@math.uio.no) Page 1 of 14 Content 1 Introduction to MEK4560 3 1.1 Minimum Potential energy..............................
Tensor Transformations and the Maximum Shear Stress. (Draft 1, 1/28/07)
") Tensor Transformations and the Maximum Shear Stress (Draft 1, 1/28/07) Introduction The order of a tensor is the number of subscripts it has. For each subscript it is multiplied by a direction cosine array
Tensor Transformations and the Maximum Shear Stress (Draft 1, 1/28/07) Introduction The order of a tensor is the number of subscripts it has. For each subscript it is multiplied by a direction cosine array
Gyroscopic matrixes of the straight beams and the discs
 Titre : Matrice gyroscopique des poutres droites et des di[...] Date : 29/05/2013 Page : 1/12 Gyroscopic matrixes of the straight beams and the discs Summarized: This document presents the formulation
Titre : Matrice gyroscopique des poutres droites et des di[...] Date : 29/05/2013 Page : 1/12 Gyroscopic matrixes of the straight beams and the discs Summarized: This document presents the formulation
Department of Structural, Faculty of Civil Engineering, Architecture and Urban Design, State University of Campinas, Brazil
 Blucher Mechanical Engineering Proceedings May 2014, vol. 1, num. 1 www.proceedings.blucher.com.br/evento/10wccm A SIMPLIFIED FORMULATION FOR STRESS AND TRACTION BOUNDARY IN- TEGRAL EQUATIONS USING THE
Blucher Mechanical Engineering Proceedings May 2014, vol. 1, num. 1 www.proceedings.blucher.com.br/evento/10wccm A SIMPLIFIED FORMULATION FOR STRESS AND TRACTION BOUNDARY IN- TEGRAL EQUATIONS USING THE
A Numerical Study of Finite Element Calculations for Incompressible Materials under Applied Boundary Displacements
 A Numerical Study of Finite Element Calculations for Incompressible Materials under Applied Boundary Displacements A Thesis Submitted to the College of Graduate Studies and Research in Partial Fulfillment
A Numerical Study of Finite Element Calculations for Incompressible Materials under Applied Boundary Displacements A Thesis Submitted to the College of Graduate Studies and Research in Partial Fulfillment
Symmetric Bending of Beams
 Symmetric Bending of Beams beam is any long structural member on which loads act perpendicular to the longitudinal axis. Learning objectives Understand the theory, its limitations and its applications
Symmetric Bending of Beams beam is any long structural member on which loads act perpendicular to the longitudinal axis. Learning objectives Understand the theory, its limitations and its applications
Notes on Cellwise Data Interpolation for Visualization Xavier Tricoche
 Notes on Cellwise Data Interpolation for Visualization Xavier Tricoche urdue University While the data (computed or measured) used in visualization is only available in discrete form, it typically corresponds
Notes on Cellwise Data Interpolation for Visualization Xavier Tricoche urdue University While the data (computed or measured) used in visualization is only available in discrete form, it typically corresponds
Table of Contents. Preface...xvii. Part 1. Level
 Preface...xvii Part 1. Level 1... 1 Chapter 1. The Basics of Linear Elastic Behavior... 3 1.1. Cohesion forces... 4 1.2. The notion of stress... 6 1.2.1. Definition... 6 1.2.2. Graphical representation...
Preface...xvii Part 1. Level 1... 1 Chapter 1. The Basics of Linear Elastic Behavior... 3 1.1. Cohesion forces... 4 1.2. The notion of stress... 6 1.2.1. Definition... 6 1.2.2. Graphical representation...
Zero Energy Modes in One Dimension: An Introduction to Hourglass Modes
 Zero Energy Modes in One Dimension: An Introduction to Hourglass Modes David J. Benson March 9, 2003 Reduced integration does a lot of good things for an element: it reduces the computational cost, it
Zero Energy Modes in One Dimension: An Introduction to Hourglass Modes David J. Benson March 9, 2003 Reduced integration does a lot of good things for an element: it reduces the computational cost, it
Review Lecture. AE1108-II: Aerospace Mechanics of Materials. Dr. Calvin Rans Dr. Sofia Teixeira De Freitas
 Review Lecture AE1108-II: Aerospace Mechanics of Materials Dr. Calvin Rans Dr. Sofia Teixeira De Freitas Aerospace Structures & Materials Faculty of Aerospace Engineering Analysis of an Engineering System
Review Lecture AE1108-II: Aerospace Mechanics of Materials Dr. Calvin Rans Dr. Sofia Teixeira De Freitas Aerospace Structures & Materials Faculty of Aerospace Engineering Analysis of an Engineering System
Plane and axisymmetric models in Mentat & MARC. Tutorial with some Background
 Plane and axisymmetric models in Mentat & MARC Tutorial with some Background Eindhoven University of Technology Department of Mechanical Engineering Piet J.G. Schreurs Lambèrt C.A. van Breemen March 6,
Plane and axisymmetric models in Mentat & MARC Tutorial with some Background Eindhoven University of Technology Department of Mechanical Engineering Piet J.G. Schreurs Lambèrt C.A. van Breemen March 6,
Alternative numerical method in continuum mechanics COMPUTATIONAL MULTISCALE. University of Liège Aerospace & Mechanical Engineering
 University of Liège Aerospace & Mechanical Engineering Alternative numerical method in continuum mechanics COMPUTATIONAL MULTISCALE Van Dung NGUYEN Innocent NIYONZIMA Aerospace & Mechanical engineering
University of Liège Aerospace & Mechanical Engineering Alternative numerical method in continuum mechanics COMPUTATIONAL MULTISCALE Van Dung NGUYEN Innocent NIYONZIMA Aerospace & Mechanical engineering
ENGN2340 Final Project: Implementation of a Euler-Bernuolli Beam Element Michael Monn
 ENGN234 Final Project: Implementation of a Euler-Bernuolli Beam Element Michael Monn 12/11/13 Problem Definition and Shape Functions Although there exist many analytical solutions to the Euler-Bernuolli
ENGN234 Final Project: Implementation of a Euler-Bernuolli Beam Element Michael Monn 12/11/13 Problem Definition and Shape Functions Although there exist many analytical solutions to the Euler-Bernuolli
CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES
 CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES * Governing equations in beam and plate bending ** Solution by superposition 1.1 From Beam Bending to Plate Bending 1.2 Governing Equations For Symmetric
CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES * Governing equations in beam and plate bending ** Solution by superposition 1.1 From Beam Bending to Plate Bending 1.2 Governing Equations For Symmetric