Structural Dynamics Lecture Eleven: Dynamic Response of MDOF Systems: (Chapter 11) By: H. Ahmadian
|
|
|
- Julie Dickerson
- 5 years ago
- Views:
Transcription
 By: H. Ahmadian ahmadian@iust.")
1 Structural Dynamics Lecture Eleven: Dynamic Response of MDOF Systems: (Chapter 11) By: H. Ahmadian
2 Dynamic Response of MDOF Systems: Mode-Superposition Method Mode-Superposition Method: Principal Coordinates Mode-Superposition Solutions for MDOF Systems with Modal Damping: Frequency-Response Analysis Mode-Displacement Solution for the Response of MDOF Systems Mode-Acceleration Solution for the Response of Undamped MDOF Systems Dynamic Stresses by Mode Superposition Mode Superposition for Undamped Systems with Rigid-Body Modes
3 MODE-DISPLACEMENT SOLUTION FOR THE RESPONSE OF MDOF SYSTEMS In many cases only a subset of the modes is available We examine modal truncation and determine the factors to be considered in deciding how many modes to include.
4 Mode-displacement solution The mode-displacement solution ignores completely the contribution of modes not included in the set The "kept modes are not restricted to the lowest-frequency modes if some modes of higher frequency are available and are considered to be important.
5 Example What conclusions can you draw concerning truncation to one mode, to two modes, or to three modes?
6 Example: Modal masses and stiffnesses
7 Example: The modal forces
8 Example: The mode-displacement
9 Example: The mode-displacement
10 Mode-acceleration solution
11 Example Determine an expression for u 1 using Mode Acceleration Method, Compare the results with the results of modedisplacement method.
12 Example: The mode-acceleration solution
13 Example: The mode-acceleration solution
14 Example: The mode-acceleration solution
15 DYNAMIC STRESSES BY MODE SUPERPOSITION For the mode-displacement method, the internal stresses are given by: For the mode-acceleration method for an undamped system, the displacement approximation leads to the stress approximation:
16 Example For the shear building, write an expression for the shear force at the i th story corresponding to mode r.
17 Dynamic Response of MDOF Systems: Mode-Superposition Method Mode-Superposition Method: Principal Coordinates Mode-Superposition Solutions for MDOF Systems with Modal Damping: Frequency-Response Analysis Mode-Displacement Solution for the Response of MDOF Systems Mode-Acceleration Solution for the Response of Undamped MDOF Systems Dynamic Stresses by Mode Superposition Mode Superposition for Undamped Systems with Rigid-Body Modes
18 Structural Dynamics Lecture 12: Dynamic Response of MDOF Systems: (Chapter 11) By: H. Ahmadian
19 Dynamic Response of MDOF Systems: Mode-Superposition Method Mode-Superposition Method: Principal Coordinates Mode-Superposition Solutions for MDOF Systems with Modal Damping: Frequency-Response Analysis Mode-Displacement Solution for the Response of MDOF Systems Mode-Acceleration Solution for the Response of Undamped MDOF Systems Dynamic Stresses by Mode Superposition Mode Superposition for Undamped Systems with Rigid-Body Modes
20 DYNAMIC STRESSES BY MODE SUPERPOSITION For the mode-displacement method, the internal stresses are given by: For the mode-acceleration method for an undamped system, the displacement approximation leads to the stress approximation:
21 Example For the shear building, write an expression for the shear force at the i th story corresponding to mode r.
22 MODE SUPERPOSITION FOR UNDAMPED SYSTEMS WITH RIGID-BODY MODES
23 Mode-Displacement Method for Systems with Rigid-Body Modes All rigid-body modes are employed, Included are number of elastic modes. Rigid-body displacements do not give rise to internal stresses:
24 Mode-Acceleration Method for Systems with Rigid-Body Modes The stiffness matrix is singular and cannot be inverted, The mode-acceleration method cannot be employed in the straightforward manner Truncating the number of elastic modes Must include all flexible modes.
25 Mode-Acceleration Method for Systems with Rigid-Body Modes In determining the elastic displacements, we use a selfequilibrated force system of applied forces and rigid-body inertia forces.
26 Mode-Acceleration Method for Systems with Rigid-Body Modes The Inertia-Relief Matrix
27 Mode-Acceleration Method for Systems with Rigid-Body Modes In order to calculate a flexibility matrix we need to impose N R arbitrary constraints. Then let A R be the flexibility matrix of the system relative to these statically determinate constraints, with zeros filling in the N R rows and columns corresponding to the constraints.
28 Mode-Acceleration Method for Systems with Rigid-Body Modes
29 Stresses in Truncated Models of Systems with Rigid-Body Modes
30 Stresses in Truncated Models of Systems with Rigid-Body Modes Example 11.8 Use the mode-displacement method and the mode-acceleration method to determine expressions for the maximum force in each of the two springs shown in Fig.1 due to application of a step force P3(t) = Po. t >0. Compare the convergence of the two methods. The system is at rest at t = 0.
31 Example 11.8 Modes and Natural Frequencies
32 Example 11.8 Modes and Natural Frequencies
33 Example 11.8 Initial conditions and generalized forces
34 Example 11.8 Solutions in modal coordinates
35 Example 11.8 The modal stress vectors
36 Example 11.8 The mode-displacement approximation to the spring forces (internal stresses)
37 Example 11.8 The mode-displacement approximation to the spring forces (internal stresses)
38 Example 11.8 The mode-acceleration solution for internal stresses
39 Example 11.8 The mode-acceleration solution for internal stresses
40 Example 11.8 Comparison The two mode solution are identical, since this system has only two elastic modes. The example is too small to indicate improved "convergence" of the mode acceleration method over the mode-displacement method.

41 Extra Example
42 Extra Example
43 Extra Example
44 Dynamic Response of MDOF Systems: Mode-Superposition Method Mode-Superposition Method: Principal Coordinates Mode-Superposition Solutions for MDOF Systems with Modal Damping: Frequency-Response Analysis Mode-Displacement Solution for the Response of MDOF Systems Mode-Acceleration Solution for the Response of Undamped MDOF Systems Dynamic Stresses by Mode Superposition Mode Superposition for Undamped Systems with Rigid-Body Modes
45 Structural Dynamics Lecture 13: Mathematical Models of Continuous Systems (Chapter 12) By: H. Ahmadian
46 Mathematical Models of Continuous Systems Applications of Newton's Laws: Axial Deformation and Torsion Application of Newton's Laws: Transverse Vibration of Linearly Elastic Beams (Bernoulli-Euler Beam Theory) Application of Hamilton's Principle: Torsion of a Rod with Circular Cross Section Application of the Extended Hamilton's Principle: Beam Flexure Including Shear Deformation and Rotatory Inertia (Timoshenko Beam Theory)
47 APPLICATIONS OF NEWTON'S LAWS: AXIAL DEFORMATION AND TORSION The axial deformation assumptions, The axis of the member remains straight. Cross sections remain plane and remain perpendicular to the axis of the member. The material is linearly elastic. ' The material properties (E, p) are constant at a given cross section, but may vary with x.
48 Constitutive Equation
49 Applications of Newton's Laws:
50 Common Boundary Conditions: Tip mass Elastic Support
51 Torsional Deformation of Rods with Circular Cross Section The axis of the member, which is labeled the x axis, remains straight. Cross sections remain plane and remain perpendicular to the axis of the member. Radial lines in each cross section remain straight and radial as the cross section rotates through angle e about the axis. The material is linearly elastic. The shear modulus is constant at a given cross section but may vary with x.
52 Newton's Law for moments
53 Common Boundary Conditions: An example: Rod-disk system
54 TRANSVERSE VIBRATION OF LINEARLY ELASTIC EULER-BERNOULLI BEAMS The Euler-Bernoulli assumptions of elementary beam theory are: The x-y plane is a principal plane of the beam, and it remains plane as the beam deforms in the y direction. There is an axis of the beam, which undergoes no extension or contraction. This is called the neutral axis, and it is labeled the x axis. The original xz plane is called the neutral surface.' Cross sections, which are perpendicular to the neutral axis in the undeformed beam, remain plane and remain perpendicular to the deformed neutral axis; that is, transverse shear deformation is neglected. The material is linearly elastic, with modulus of elasticity E(x); that is, the beam is homogeneous at any cross section. (Generally, E is constant throughout the beam.). Normal stresses along y and z are negligible compared to that of x
55 TRANSVERSE VIBRATION OF LINEARLY ELASTIC EULER-BERNOULLI BEAMS The following dynamics assumptions will also be made: The rotatory inertia of the beam may be neglected in the moment equation. The mass density is constant at each cross section, so that the mass center coincides with the centroid of the cross section.
56 TRANSVERSE VIBRATION OF LINEARLY ELASTIC EULER-BERNOULLI BEAMS
57 Common Boundary Conditions: Fixed end at x = x e : Simply supported end at x = x e :
58 Common Boundary Conditions: Free end The tip mass at x=l:
59 A Beam Subjected to Compressive End Load
60 Mathematical Models of Continuous Systems Applications of Newton's Laws: Axial Deformation and Torsion Application of Newton's Laws: Transverse Vibration of Linearly Elastic Beams (Bernoulli-Euler Beam Theory) Application of Hamilton's Principle: Torsion of a Rod with Circular Cross Section Application of the Extended Hamilton's Principle: Beam Flexure Including Shear Deformation and Rotatory Inertia (Timoshenko Beam Theory)
61 Structural Dynamics Lecture 14: Mathematical Models of Continuous Systems (Chapter 12) By: H. Ahmadian
62 Mathematical Models of Continuous Systems Applications of Newton's Laws: Axial Deformation and Torsion Application of Newton's Laws: Transverse Vibration of Linearly Elastic Beams (Bernoulli-Euler Beam Theory) Application of Hamilton's Principle: Torsion of a Rod with Circular Cross Section Application of the Extended Hamilton's Principle: Beam Flexure Including Shear Deformation and Rotatory Inertia (Timoshenko Beam Theory)
63 APPLICATION 'OF HAMILTON'S PRINCIPLE: TORSION OF A CIRCULAR ROD
64 APPLICATION 'OF HAMILTON'S PRINCIPLE: TORSION OF A CIRCULAR ROD
65 APPLICATION 'OF HAMILTON'S PRINCIPLE: TORSION OF A CIRCULAR ROD
66 APPLICATION 'OF HAMILTON'S PRINCIPLE: TORSION OF A CIRCULAR ROD
67 APPLICATION 'OF HAMILTON'S PRINCIPLE: TORSION OF A CIRCULAR ROD
68 BEAM FLEXURE INCLUDING SHEAR DEFORMATION AND ROTATORY INERTIA
69 BEAM FLEXURE INCLUDING SHEAR DEFORMATION AND ROTATORY INERTIA
70 Application of the Extended Hamilton's Principle
71 Application of the Extended Hamilton's Principle
72 Timoshenko Beam Theory
73 Timoshenko Beam Theory If the beam has uniform cross-sectional properties, the two coupled PDEs may be combined to give a single equation in v:
74 Mathematical Models of Continuous Systems Applications of Newton's Laws: Axial Deformation and Torsion Application of Newton's Laws: Transverse Vibration of Linearly Elastic Beams (Bernoulli-Euler Beam Theory) Application of Hamilton's Principle: Torsion of a Rod with Circular Cross Section Application of the Extended Hamilton's Principle: Beam Flexure Including Shear Deformation and Rotatory Inertia (Timoshenko Beam Theory)
75 Structural Dynamics Lecture 15: Free Vibration of Continuous Systems (Chapter 13) By: H. Ahmadian
76 Free Vibration of Continuous Systems Free Axial and Torsional Vibration Free Transverse Vibration of Bernoulli-Euler Beams Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia Some Properties of Natural Modes of Continuous Systems Free Vibration of Thin Flat Plates
77 FREE AXIAL VIBRATION
78 FREE AXIAL VIBRATION End conditions Fixed end: Free end:
79 FREE AXIAL VIBRATION Example:
80 FREE AXIAL VIBRATION Example:
81 FREE TRANSVERSE VIBRATION OF BERNOULLI-EULER BEAMS Free vibration of a uniform beam,
82 FREE TRANSVERSE VIBRATION OF BERNOULLI-EULER BEAMS There are five constants in the general solution: the four amplitude constants and the eigenvalue.
83 FREE TRANSVERSE VIBRATION OF BERNOULLI-EULER BEAMS: Example
84 FREE TRANSVERSE VIBRATION OF BERNOULLI-EULER BEAMS: Example
85 FREE TRANSVERSE VIBRATION OF BERNOULLI-EULER BEAMS: Example
86 FREE TRANSVERSE VIBRATION OF BERNOULLI-EULER BEAMS: Example
87
88 RAYLEIGH'S METHOD FOR APPROXIMATING THE FUNDAMENTAL FREQUENCY OF A CONTINUOUS SYSTEM Lord Rayleigh observed that for undamped free vibration, the motion is simple harmonic motion. Thus, Rayleigh also observed that energy is conserved. the maximum kinetic energy is equal to the maximum potential energy, that is,
89 RAYLEIGH'S METHOD FOR APPROXIMATING THE FUNDAMENTAL FREQUENCY OF A CONTINUOUS SYSTEM
90 Example : Approximate fundamental frequency of a uniform cantilever beam The shape function
91 FREE TRANSVERSE VIBRATION OF BEAMS INCLUDING SHEAR DEFORMATION AND ROTATORY INERTIA Consider a uniform, simply supported beam: Equations of motion: Geometric boundary conditions: Natural boundary conditions:
92 FREE TRANSVERSE VIBRATION OF BEAMS INCLUDING SHEAR DEFORMATION AND ROTATORY INERTIA So the boundary conditions reduce, respectively, to
93 FREE TRANSVERSE VIBRATION OF BEAMS INCLUDING SHEAR DEFORMATION AND ROTATORY INERTIA The simply supported beam mode shape satisfies both the boundary conditions, and the equation of motion:
94 FREE TRANSVERSE VIBRATION OF BEAMS INCLUDING SHEAR DEFORMATION AND ROTATORY INERTIA Bernoulli-Euler beam characteristic equation The shear correction term The rotatory inertia correction term
95 Free Vibration of Continuous Systems Free Axial and Torsional Vibration Free Transverse Vibration of Bernoulli-Euler Beams Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia Some Properties of Natural Modes of Continuous Systems Free Vibration of Thin Flat Plates
96 Structural Dynamics Lecture 16: Free Vibration of Continuous Systems (Chapter 13) By: H. Ahmadian
97 Free Vibration of Continuous Systems Free Axial and Torsional Vibration Free Transverse Vibration of Bernoulli-Euler Beams Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia Some Properties of Natural Modes of Continuous Systems Free Vibration of Thin Flat Plates
98 SOME PROPERTIES OF NATURAL MODES OF CONTINUOUS SYSTEMS Following properties associated with the modes are considered: scaling (or normalization), orthogonality, the expansion theorem, and the Rayleigh quotient. These are illustrated by using the Bernoulli-Euler beam equations.
99 SOME PROPERTIES OF NATURAL MODES OF CONTINUOUS SYSTEMS: scaling Orthononnal modes
100 SOME PROPERTIES OF NATURAL MODES OF CONTINUOUS SYSTEMS: orthogonality
101 SOME PROPERTIES OF NATURAL MODES OF CONTINUOUS SYSTEMS: orthogonality
102 SOME PROPERTIES OF NATURAL MODES OF CONTINUOUS SYSTEMS: orthogonality To demonstrate the orthogonality relations for beams with loaded boundaries, we consider two distinct solutions of the eigenvalue problem:
103 Orthogonality relations for beams
104 Orthogonality relations for beams
105 Expansion Theorem: Any function V(x) that satisfies the same boundary conditions as are satisfied by a given set of orthonormal modes, and is such that (EI V")" is a continuous function, can be represented by an absolutely and uniformly convergent series of the form
106 RESPONSE TO INITIAL EXCITATIONS: Beams in Bending Vibration
107 RESPONSE TO INITIAL EXCITATIONS: Beams in Bending Vibration To demonstrate that every one of the natural modes can be excited independently of the other modes we select the initials as:
108 RESPONSE TO INITIAL EXCITATIONS: Response of systems with tip masses Boundary conditions Initial conditions
109 RESPONSE TO INITIAL EXCITATIONS: Response of systems with tip masses Observing from boundary condition
110 RESPONSE TO INITIAL EXCITATIONS: Response of systems with tip masses Similarly,
111 Example: Response of a cantilever beam with a lumped mass at the end to the initial velocity:
112 Example:
113 Example: Because initial velocity resembles the 2 nd mode
114 RESPONSE TO EXTERNAL EXCITATIONS The various types of distributed-parameter systems differ more in appearance than in vibrational characteristics. We consider the response of a beam in bending supported by a spring of stiffness k at x=0 and pinned at x=l.
115 RESPONSE TO EXTERNAL EXCITATIONS Orthonormal modes
116 RESPONSE TO EXTERNAL EXCITATIONS: Harmonic Excitation Controls which mode is excited. Controls the resonance.
117 RESPONSE TO EXTERNAL EXCITATIONS: Arbitrary Excitation The developments remain essentially the same for all other boundary conditions, and the same can be said about other systems.
118 Example Derive the response of a uniform pinned-pinned beam to a concentrated force of amplitude F 0 acting at x = L/2 and having the form of a step function. Orthonormal Modes
119 Example
120 Free Vibration of Continuous Systems Free Axial and Torsional Vibration Free Transverse Vibration of Bernoulli-Euler Beams Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia Some Properties of Natural Modes of Continuous Systems Free Vibration of Thin Flat Plates
121 Structural Dynamics Lecture 17: Free Vibration of Continuous Systems (Chapter 13) By: H. Ahmadian
122 Free Vibration of Continuous Systems Free Axial and Torsional Vibration Free Transverse Vibration of Bernoulli-Euler Beams Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia Some Properties of Natural Modes of Continuous Systems Free Vibration of Thin Flat Plates
123 Rayleigh Quotient:
124 Example: Lowest natural frequency of the fixed-free tapered rod in axial vibration The 1 st mode of a uniform clamped-free rod as a trial function: A comparison function
125 THE RAYLEIGH-RITZ METHOD The method was developed by Ritz as an extension of Rayleigh's energy method. Although Rayleigh claimed that the method originated with him, the form in which the method is generally used is due to Ritz. The first step in the Rayleigh-Ritz method is to construct the minimizing sequence: undetermined coefficients independent trial functions
126 THE RAYLEIGH-RITZ METHOD The independence of the trial functions implies the independence of the coefficients, which in turn implies the independence of the variations
127 THE RAYLEIGH-RITZ METHOD Solving the equations amounts to determining the coefficients, as well as to determining
128 Example : Solve the eigenvalue problem for the fixed-free tapered rod in axial vibration The comparison functions
129 Example :
130 Example : n = 2
131 Example : n = 2
132 Example : n = 3
133 Example : n = 3
134 Example : The Ritz eigenvalues for the two approximations are: The improvement in the first two Ritz natural frequencies is very small, indicates the chosen comparison functions resemble very closely the actual natural modes. Convergence to the lowest eigenvalue with six decimal places accuracy is obtained with 11 terms:
135 Truncation Approximation of a system with an infinite number of DOFs by a discrete system with n degrees of freedom implies truncation: Constraints tend to increase the stiffness of a system: The nature of the Ritz eigenvalues requires further elaboration.
136 Truncation A question of particular interest is how the eigenvalues of the (n +1)-DOF approximation relate to the eigenvalues of the n-dof approximation. We observe that the extra term in series does not affect the mass and stiffness coefficients computed on the basis of an n-term series (embedding property):
137 Truncation For matrices with embedding property the eigenvalues satisfy the separation theorem:
138 Free Vibration of Continuous Systems Free Axial and Torsional Vibration Free Transverse Vibration of Bernoulli-Euler Beams Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia Some Properties of Natural Modes of Continuous Systems Free Vibration of Thin Flat Plates
139 Structural Dynamics Lecture 18: Free Vibration of Continuous Systems (Chapter 13) By: H. Ahmadian
140 Free Vibration of Continuous Systems > Free Axial and Torsional Vibration > Free Transverse Vibration of Bernoulli-Euler Beams > Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System > Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia > Some Properties of Natural Modes of Continuous Systems > Free Vibration of Thin Flat Plates
141 VIBRATION OF PLATES > Plates have bending stiffness in a manner similar to beams in bending. > In the case of plates one can think of two planes of bending, producing in general two distinct curvatures. > The small deflection theory of thin plates, called classical plate theory or Kirchhoff theory, is based on assumptions similar to those used in thin beam or Euler-Bernoulli beam theory.
142 EQUATION OF MOTION: CLASSICAL PLATE THEORY The elementary theory of plates is based on the following assumptions: > The thickness of the plate (h) is small compared to its lateral dimensions. > The middle plane of the plate does not undergo in-plane deformation. Thus, the midplane remains as the neutral plane after deformation or bending. > The displacement components of the midsurface of the plate are small compared to the thickness of the plate. > The influence of transverse shear deformation is neglected. This implies that plane sections normal to the midsurface before deformation remain normal to the rnidsurface even after deformation or bending. > The transverse normal strain under transverse loading can be neglected. The transverse normal stress is small and hence can be neglected compared to the other components of stress.
143 Moment - Shear Force Resultants:

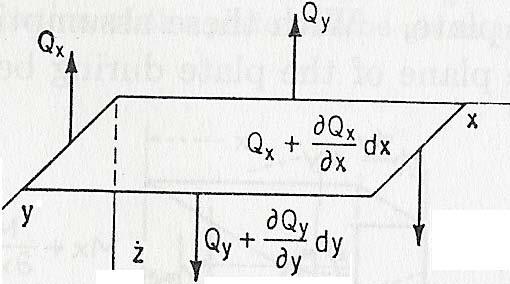
144 Equation of motion
145 BOUNDARY CONDITIONS
146 BOUNDARY CONDITIONS
147 BOUNDARY CONDITIONS: Free Edge > There are three boundary conditions, whereas the equation of motion requires only two: > Kirchhoff showed that the conditions on the shear force and the twisting moment are not independent and can be combined into only one boundary condition.
148 BOUNDARY CONDITIONS: Free Edge Replacing the twisting moment by an equivalent vertical force.
149 BOUNDARY CONDITIONS
150 BOUNDARY CONDITIONS
151 BOUNDARY CONDITIONS
152 FREE VIBRATION OF RECTANGULAR PLATES
153 FREE VIBRATION OF RECTANGULAR PLATES
154 FREE VIBRATION OF RECTANGULAR PLATES

155 Solution for a Simply Supported Plate We find that all the constants A i except A 1 and
156 Solution for a Simply Supported Plate The initial conditions of the plate are:
157 Solution for a Simply Supported Plate
158 Solution for a Simply Supported Plate
159 Solution for a Simply Supported Plate
160 Free Vibration of Continuous Systems > Free Axial and Torsional Vibration > Free Transverse Vibration of Bernoulli-Euler Beams > Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System > Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia > Some Properties of Natural Modes of Continuous Systems > Free Vibration of Thin Flat Plates
161 Structural Dynamics Lecture 19: Free Vibration of Continuous Systems (Chapter 13) By: H. Ahmadian
162 Free Vibration of Continuous Systems > Free Axial and Torsional Vibration > Free Transverse Vibration of Bernoulli-Euler Beams > Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System > Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia > Some Properties of Natural Modes of Continuous Systems > Free Vibration of Thin Flat Plates
163 Vibrations of Rectangular Plates The functions X(x) and Y(y) can be separated provided either of the followings are satisfied:
164 Vibrations of Rectangular Plates These equations can be satisfied only by the trigonometric functions:
165 Vibrations of Rectangular Plates Assume that the plate is simply supported along edges x =0 and x =a: Implying:
166 Vibrations of Rectangular Plates The various boundary conditions can be stated, SS-SS-SS-SS, SS-C-SS-C, SS-F-SS-F, SS-C-SS-SS, SS-F-SS-SS, SS-F-SS-C Assuming:
167 Vibrations of Rectangular Plates y = 0 and y = b are simply supported:
168 Vibrations of Rectangular Plates y = 0 and y = b are simply supported:
169 Vibrations of Rectangular Plates y = 0 and y = b are clamped:
170 Vibrations of Rectangular Plates
171 Vibrations of Rectangular Plates Exact characteristic equations for some of classical boundary conditions of vibrating moderately thick rectangular plates Shahrokh Hosseini Hashemi and M. Arsanjani,International Journal of Solids and Structures Volume 42, Issues 3-4, February 2005, Pages Exact solution for linear buckling of rectangular Mindlin plates Shahrokh Hosseini-Hashemi, Korosh Khorshidi, and Marco Amabili, Journal of Sound and Vibration Volume 315, Issues 1-2, 5 August 2008, Pages
172 FORCED VIBRATION OF RECTANGULAR PLATES the normal modes
173 FORCED VIBRATION OF RECTANGULAR PLATES Using a modal analysis procedure:
174 FORCED VIBRATION OF RECTANGULAR PLATES The response of simply supported rectangular plates:
175 Free Vibration of Continuous Systems > Free Axial and Torsional Vibration > Free Transverse Vibration of Bernoulli-Euler Beams > Rayleigh's Method for Approximating the Fundamental Frequency of a Continuous System > Free Transverse Vibration of Beams Including Shear Deformation and Rotatory Inertia > Some Properties of Natural Modes of Continuous Systems > Free Vibration of Thin Flat Plates
Advanced Vibrations. Distributed-Parameter Systems: Exact Solutions (Lecture 10) By: H. Ahmadian
 By: H. Ahmadian") Advanced Vibrations Distributed-Parameter Systems: Exact Solutions (Lecture 10) By: H. Ahmadian ahmadian@iust.ac.ir Distributed-Parameter Systems: Exact Solutions Relation between Discrete and Distributed
Advanced Vibrations Distributed-Parameter Systems: Exact Solutions (Lecture 10) By: H. Ahmadian ahmadian@iust.ac.ir Distributed-Parameter Systems: Exact Solutions Relation between Discrete and Distributed
Table of Contents. Preface... 13
 Table of Contents Preface... 13 Chapter 1. Vibrations of Continuous Elastic Solid Media... 17 1.1. Objective of the chapter... 17 1.2. Equations of motion and boundary conditions of continuous media...
Table of Contents Preface... 13 Chapter 1. Vibrations of Continuous Elastic Solid Media... 17 1.1. Objective of the chapter... 17 1.2. Equations of motion and boundary conditions of continuous media...
Introduction to Continuous Systems. Continuous Systems. Strings, Torsional Rods and Beams.
 Outline of Continuous Systems. Introduction to Continuous Systems. Continuous Systems. Strings, Torsional Rods and Beams. Vibrations of Flexible Strings. Torsional Vibration of Rods. Bernoulli-Euler Beams.
Outline of Continuous Systems. Introduction to Continuous Systems. Continuous Systems. Strings, Torsional Rods and Beams. Vibrations of Flexible Strings. Torsional Vibration of Rods. Bernoulli-Euler Beams.
Advanced Vibrations. Distributed-Parameter Systems: Approximate Methods Lecture 20. By: H. Ahmadian
 Advanced Vibrations Distributed-Parameter Systems: Approximate Methods Lecture 20 By: H. Ahmadian ahmadian@iust.ac.ir Distributed-Parameter Systems: Approximate Methods Rayleigh's Principle The Rayleigh-Ritz
Advanced Vibrations Distributed-Parameter Systems: Approximate Methods Lecture 20 By: H. Ahmadian ahmadian@iust.ac.ir Distributed-Parameter Systems: Approximate Methods Rayleigh's Principle The Rayleigh-Ritz
COPYRIGHTED MATERIAL. Index
 Index A Admissible function, 163 Amplification factor, 36 Amplitude, 1, 22 Amplitude-modulated carrier, 630 Amplitude ratio, 36 Antinodes, 612 Approximate analytical methods, 647 Assumed modes method,
Index A Admissible function, 163 Amplification factor, 36 Amplitude, 1, 22 Amplitude-modulated carrier, 630 Amplitude ratio, 36 Antinodes, 612 Approximate analytical methods, 647 Assumed modes method,
Structural Dynamics A Graduate Course in Aerospace Engineering
 Structural Dynamics A Graduate Course in Aerospace Engineering By: H. Ahmadian ahmadian@iust.ac.ir The Science and Art of Structural Dynamics What do all the followings have in common? > A sport-utility
Structural Dynamics A Graduate Course in Aerospace Engineering By: H. Ahmadian ahmadian@iust.ac.ir The Science and Art of Structural Dynamics What do all the followings have in common? > A sport-utility
Advanced Vibrations. Elements of Analytical Dynamics. By: H. Ahmadian Lecture One
 Advanced Vibrations Lecture One Elements of Analytical Dynamics By: H. Ahmadian ahmadian@iust.ac.ir Elements of Analytical Dynamics Newton's laws were formulated for a single particle Can be extended to
Advanced Vibrations Lecture One Elements of Analytical Dynamics By: H. Ahmadian ahmadian@iust.ac.ir Elements of Analytical Dynamics Newton's laws were formulated for a single particle Can be extended to
Lecture 15 Strain and stress in beams
 Spring, 2019 ME 323 Mechanics of Materials Lecture 15 Strain and stress in beams Reading assignment: 6.1 6.2 News: Instructor: Prof. Marcial Gonzalez Last modified: 1/6/19 9:42:38 PM Beam theory (@ ME
Spring, 2019 ME 323 Mechanics of Materials Lecture 15 Strain and stress in beams Reading assignment: 6.1 6.2 News: Instructor: Prof. Marcial Gonzalez Last modified: 1/6/19 9:42:38 PM Beam theory (@ ME
202 Index. failure, 26 field equation, 122 force, 1
 Index acceleration, 12, 161 admissible function, 155 admissible stress, 32 Airy's stress function, 122, 124 d'alembert's principle, 165, 167, 177 amplitude, 171 analogy, 76 anisotropic material, 20 aperiodic
Index acceleration, 12, 161 admissible function, 155 admissible stress, 32 Airy's stress function, 122, 124 d'alembert's principle, 165, 167, 177 amplitude, 171 analogy, 76 anisotropic material, 20 aperiodic
Structural Dynamics Lecture 4. Outline of Lecture 4. Multi-Degree-of-Freedom Systems. Formulation of Equations of Motions. Undamped Eigenvibrations.
 Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Chapter 3. Load and Stress Analysis
 Chapter 3 Load and Stress Analysis 2 Shear Force and Bending Moments in Beams Internal shear force V & bending moment M must ensure equilibrium Fig. 3 2 Sign Conventions for Bending and Shear Fig. 3 3
Chapter 3 Load and Stress Analysis 2 Shear Force and Bending Moments in Beams Internal shear force V & bending moment M must ensure equilibrium Fig. 3 2 Sign Conventions for Bending and Shear Fig. 3 3
Esben Byskov. Elementary Continuum. Mechanics for Everyone. With Applications to Structural Mechanics. Springer
 Esben Byskov Elementary Continuum Mechanics for Everyone With Applications to Structural Mechanics Springer Contents Preface v Contents ix Introduction What Is Continuum Mechanics? "I Need Continuum Mechanics
Esben Byskov Elementary Continuum Mechanics for Everyone With Applications to Structural Mechanics Springer Contents Preface v Contents ix Introduction What Is Continuum Mechanics? "I Need Continuum Mechanics
Presented By: EAS 6939 Aerospace Structural Composites
 A Beam Theory for Laminated Composites and Application to Torsion Problems Dr. BhavaniV. Sankar Presented By: Sameer Luthra EAS 6939 Aerospace Structural Composites 1 Introduction Composite beams have
A Beam Theory for Laminated Composites and Application to Torsion Problems Dr. BhavaniV. Sankar Presented By: Sameer Luthra EAS 6939 Aerospace Structural Composites 1 Introduction Composite beams have
VIBRATION PROBLEMS IN ENGINEERING
 VIBRATION PROBLEMS IN ENGINEERING FIFTH EDITION W. WEAVER, JR. Professor Emeritus of Structural Engineering The Late S. P. TIMOSHENKO Professor Emeritus of Engineering Mechanics The Late D. H. YOUNG Professor
VIBRATION PROBLEMS IN ENGINEERING FIFTH EDITION W. WEAVER, JR. Professor Emeritus of Structural Engineering The Late S. P. TIMOSHENKO Professor Emeritus of Engineering Mechanics The Late D. H. YOUNG Professor
Chapter 4 Deflection and Stiffness
 Chapter 4 Deflection and Stiffness Asst. Prof. Dr. Supakit Rooppakhun Chapter Outline Deflection and Stiffness 4-1 Spring Rates 4-2 Tension, Compression, and Torsion 4-3 Deflection Due to Bending 4-4 Beam
Chapter 4 Deflection and Stiffness Asst. Prof. Dr. Supakit Rooppakhun Chapter Outline Deflection and Stiffness 4-1 Spring Rates 4-2 Tension, Compression, and Torsion 4-3 Deflection Due to Bending 4-4 Beam
Consider an elastic spring as shown in the Fig.2.4. When the spring is slowly
 .3 Strain Energy Consider an elastic spring as shown in the Fig..4. When the spring is slowly pulled, it deflects by a small amount u 1. When the load is removed from the spring, it goes back to the original
.3 Strain Energy Consider an elastic spring as shown in the Fig..4. When the spring is slowly pulled, it deflects by a small amount u 1. When the load is removed from the spring, it goes back to the original
on the figure. Someone has suggested that, in terms of the degrees of freedom x1 and M. Note that if you think the given 1.2
 1) A two-story building frame is shown below. The mass of the frame is assumed to be lumped at the floor levels and the floor slabs are considered rigid. The floor masses and the story stiffnesses are
1) A two-story building frame is shown below. The mass of the frame is assumed to be lumped at the floor levels and the floor slabs are considered rigid. The floor masses and the story stiffnesses are
CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES
 CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES * Governing equations in beam and plate bending ** Solution by superposition 1.1 From Beam Bending to Plate Bending 1.2 Governing Equations For Symmetric
CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES * Governing equations in beam and plate bending ** Solution by superposition 1.1 From Beam Bending to Plate Bending 1.2 Governing Equations For Symmetric
Introduction to Mechanical Vibration
 2103433 Introduction to Mechanical Vibration Nopdanai Ajavakom (NAV) 1 Course Topics Introduction to Vibration What is vibration? Basic concepts of vibration Modeling Linearization Single-Degree-of-Freedom
2103433 Introduction to Mechanical Vibration Nopdanai Ajavakom (NAV) 1 Course Topics Introduction to Vibration What is vibration? Basic concepts of vibration Modeling Linearization Single-Degree-of-Freedom
3 2 6 Solve the initial value problem u ( t) 3. a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1
 3. a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1") Math Problem a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1 3 6 Solve the initial value problem u ( t) = Au( t) with u (0) =. 3 1 u 1 =, u 1 3 = b- True or false and why 1. if A is
Math Problem a- If A has eigenvalues λ =, λ = 1 and corresponding eigenvectors 1 3 6 Solve the initial value problem u ( t) = Au( t) with u (0) =. 3 1 u 1 =, u 1 3 = b- True or false and why 1. if A is
FREE VIBRATION RESPONSE OF UNDAMPED SYSTEMS
 Lecture Notes: STRUCTURAL DYNAMICS / FALL 2011 / Page: 1 FREE VIBRATION RESPONSE OF UNDAMPED SYSTEMS : : 0, 0 As demonstrated previously, the above Equation of Motion (free-vibration equation) has a solution
Lecture Notes: STRUCTURAL DYNAMICS / FALL 2011 / Page: 1 FREE VIBRATION RESPONSE OF UNDAMPED SYSTEMS : : 0, 0 As demonstrated previously, the above Equation of Motion (free-vibration equation) has a solution
D : SOLID MECHANICS. Q. 1 Q. 9 carry one mark each.
 GTE 2016 Q. 1 Q. 9 carry one mark each. D : SOLID MECHNICS Q.1 single degree of freedom vibrating system has mass of 5 kg, stiffness of 500 N/m and damping coefficient of 100 N-s/m. To make the system
GTE 2016 Q. 1 Q. 9 carry one mark each. D : SOLID MECHNICS Q.1 single degree of freedom vibrating system has mass of 5 kg, stiffness of 500 N/m and damping coefficient of 100 N-s/m. To make the system
Mechanics of Materials II. Chapter III. A review of the fundamental formulation of stress, strain, and deflection
 Mechanics of Materials II Chapter III A review of the fundamental formulation of stress, strain, and deflection Outline Introduction Assumtions and limitations Axial loading Torsion of circular shafts
Mechanics of Materials II Chapter III A review of the fundamental formulation of stress, strain, and deflection Outline Introduction Assumtions and limitations Axial loading Torsion of circular shafts
March 24, Chapter 4. Deflection and Stiffness. Dr. Mohammad Suliman Abuhaiba, PE
 Chapter 4 Deflection and Stiffness 1 2 Chapter Outline Spring Rates Tension, Compression, and Torsion Deflection Due to Bending Beam Deflection Methods Beam Deflections by Superposition Strain Energy Castigliano
Chapter 4 Deflection and Stiffness 1 2 Chapter Outline Spring Rates Tension, Compression, and Torsion Deflection Due to Bending Beam Deflection Methods Beam Deflections by Superposition Strain Energy Castigliano
Mechanical Design in Optical Engineering
 OPTI Buckling Buckling and Stability: As we learned in the previous lectures, structures may fail in a variety of ways, depending on the materials, load and support conditions. We had two primary concerns:
OPTI Buckling Buckling and Stability: As we learned in the previous lectures, structures may fail in a variety of ways, depending on the materials, load and support conditions. We had two primary concerns:
Advanced Structural Analysis EGF Section Properties and Bending
 Advanced Structural Analysis EGF316 3. Section Properties and Bending 3.1 Loads in beams When we analyse beams, we need to consider various types of loads acting on them, for example, axial forces, shear
Advanced Structural Analysis EGF316 3. Section Properties and Bending 3.1 Loads in beams When we analyse beams, we need to consider various types of loads acting on them, for example, axial forces, shear
[8] Bending and Shear Loading of Beams
![[8] Bending and Shear Loading of Beams](/thumbs/92/110949676.jpg "[8] Bending and Shear Loading of Beams") [8] Bending and Shear Loading of Beams Page 1 of 28 [8] Bending and Shear Loading of Beams [8.1] Bending of Beams (will not be covered in class) [8.2] Bending Strain and Stress [8.3] Shear in Straight
[8] Bending and Shear Loading of Beams Page 1 of 28 [8] Bending and Shear Loading of Beams [8.1] Bending of Beams (will not be covered in class) [8.2] Bending Strain and Stress [8.3] Shear in Straight
Chapter 3. Load and Stress Analysis. Lecture Slides
 Lecture Slides Chapter 3 Load and Stress Analysis 2015 by McGraw Hill Education. This is proprietary material solely for authorized instructor use. Not authorized for sale or distribution in any manner.
Lecture Slides Chapter 3 Load and Stress Analysis 2015 by McGraw Hill Education. This is proprietary material solely for authorized instructor use. Not authorized for sale or distribution in any manner.
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras. Module - 01 Lecture - 13
 Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras (Refer Slide Time: 00:25) Module - 01 Lecture - 13 In the last class, we have seen how
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras (Refer Slide Time: 00:25) Module - 01 Lecture - 13 In the last class, we have seen how
Introduction to structural dynamics
 Introduction to structural dynamics p n m n u n p n-1 p 3... m n-1 m 3... u n-1 u 3 k 1 c 1 u 1 u 2 k 2 m p 1 1 c 2 m2 p 2 k n c n m n u n p n m 2 p 2 u 2 m 1 p 1 u 1 Static vs dynamic analysis Static
Introduction to structural dynamics p n m n u n p n-1 p 3... m n-1 m 3... u n-1 u 3 k 1 c 1 u 1 u 2 k 2 m p 1 1 c 2 m2 p 2 k n c n m n u n p n m 2 p 2 u 2 m 1 p 1 u 1 Static vs dynamic analysis Static
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras. Module - 01 Lecture - 11
 Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Module - 01 Lecture - 11 Last class, what we did is, we looked at a method called superposition
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Module - 01 Lecture - 11 Last class, what we did is, we looked at a method called superposition
Modal Analysis: What it is and is not Gerrit Visser
 Modal Analysis: What it is and is not Gerrit Visser What is a Modal Analysis? What answers do we get out of it? How is it useful? What does it not tell us? In this article, we ll discuss where a modal
Modal Analysis: What it is and is not Gerrit Visser What is a Modal Analysis? What answers do we get out of it? How is it useful? What does it not tell us? In this article, we ll discuss where a modal
3. BEAMS: STRAIN, STRESS, DEFLECTIONS
 3. BEAMS: STRAIN, STRESS, DEFLECTIONS The beam, or flexural member, is frequently encountered in structures and machines, and its elementary stress analysis constitutes one of the more interesting facets
3. BEAMS: STRAIN, STRESS, DEFLECTIONS The beam, or flexural member, is frequently encountered in structures and machines, and its elementary stress analysis constitutes one of the more interesting facets
CHAPTER -6- BENDING Part -1-
 Ishik University / Sulaimani Civil Engineering Department Mechanics of Materials CE 211 CHAPTER -6- BENDING Part -1-1 CHAPTER -6- Bending Outlines of this chapter: 6.1. Chapter Objectives 6.2. Shear and
Ishik University / Sulaimani Civil Engineering Department Mechanics of Materials CE 211 CHAPTER -6- BENDING Part -1-1 CHAPTER -6- Bending Outlines of this chapter: 6.1. Chapter Objectives 6.2. Shear and
Part D: Frames and Plates
 Part D: Frames and Plates Plane Frames and Thin Plates A Beam with General Boundary Conditions The Stiffness Method Thin Plates Initial Imperfections The Ritz and Finite Element Approaches A Beam with
Part D: Frames and Plates Plane Frames and Thin Plates A Beam with General Boundary Conditions The Stiffness Method Thin Plates Initial Imperfections The Ritz and Finite Element Approaches A Beam with
PLAT DAN CANGKANG (TKS 4219)
") PLAT DAN CANGKANG (TKS 4219) SESI I: PLATES Dr.Eng. Achfas Zacoeb Dept. of Civil Engineering Brawijaya University INTRODUCTION Plates are straight, plane, two-dimensional structural components of which
PLAT DAN CANGKANG (TKS 4219) SESI I: PLATES Dr.Eng. Achfas Zacoeb Dept. of Civil Engineering Brawijaya University INTRODUCTION Plates are straight, plane, two-dimensional structural components of which
7.4 The Elementary Beam Theory
 7.4 The Elementary Beam Theory In this section, problems involving long and slender beams are addressed. s with pressure vessels, the geometry of the beam, and the specific type of loading which will be
7.4 The Elementary Beam Theory In this section, problems involving long and slender beams are addressed. s with pressure vessels, the geometry of the beam, and the specific type of loading which will be
Lecture Slides. Chapter 4. Deflection and Stiffness. The McGraw-Hill Companies 2012
 Lecture Slides Chapter 4 Deflection and Stiffness The McGraw-Hill Companies 2012 Chapter Outline Force vs Deflection Elasticity property of a material that enables it to regain its original configuration
Lecture Slides Chapter 4 Deflection and Stiffness The McGraw-Hill Companies 2012 Chapter Outline Force vs Deflection Elasticity property of a material that enables it to regain its original configuration
1859. Forced transverse vibration analysis of a Rayleigh double-beam system with a Pasternak middle layer subjected to compressive axial load
 1859. Forced transverse vibration analysis of a Rayleigh double-beam system with a Pasternak middle layer subjected to compressive axial load Nader Mohammadi 1, Mehrdad Nasirshoaibi 2 Department of Mechanical
1859. Forced transverse vibration analysis of a Rayleigh double-beam system with a Pasternak middle layer subjected to compressive axial load Nader Mohammadi 1, Mehrdad Nasirshoaibi 2 Department of Mechanical
Free vibration analysis of elastically connected multiple-beams with general boundary conditions using improved Fourier series method
 Free vibration analysis of elastically connected multiple-beams with general boundary conditions using improved Fourier series method Jingtao DU*; Deshui XU; Yufei ZHANG; Tiejun YANG; Zhigang LIU College
Free vibration analysis of elastically connected multiple-beams with general boundary conditions using improved Fourier series method Jingtao DU*; Deshui XU; Yufei ZHANG; Tiejun YANG; Zhigang LIU College
ME 475 Modal Analysis of a Tapered Beam
 ME 475 Modal Analysis of a Tapered Beam Objectives: 1. To find the natural frequencies and mode shapes of a tapered beam using FEA.. To compare the FE solution to analytical solutions of the vibratory
ME 475 Modal Analysis of a Tapered Beam Objectives: 1. To find the natural frequencies and mode shapes of a tapered beam using FEA.. To compare the FE solution to analytical solutions of the vibratory
Dr.Vinod Hosur, Professor, Civil Engg.Dept., Gogte Institute of Technology, Belgaum
 STRUCTURAL DYNAMICS Dr.Vinod Hosur, Professor, Civil Engg.Dept., Gogte Institute of Technology, Belgaum Overview of Structural Dynamics Structure Members, joints, strength, stiffness, ductility Structure
STRUCTURAL DYNAMICS Dr.Vinod Hosur, Professor, Civil Engg.Dept., Gogte Institute of Technology, Belgaum Overview of Structural Dynamics Structure Members, joints, strength, stiffness, ductility Structure
Chapter 4 Analysis of a cantilever
 Chapter 4 Analysis of a cantilever Before a complex structure is studied performing a seismic analysis, the behaviour of simpler ones should be fully understood. To achieve this knowledge we will start
Chapter 4 Analysis of a cantilever Before a complex structure is studied performing a seismic analysis, the behaviour of simpler ones should be fully understood. To achieve this knowledge we will start
Chapter 2: Rigid Bar Supported by Two Buckled Struts under Axial, Harmonic, Displacement Excitation..14
 Table of Contents Chapter 1: Research Objectives and Literature Review..1 1.1 Introduction...1 1.2 Literature Review......3 1.2.1 Describing Vibration......3 1.2.2 Vibration Isolation.....6 1.2.2.1 Overview.
Table of Contents Chapter 1: Research Objectives and Literature Review..1 1.1 Introduction...1 1.2 Literature Review......3 1.2.1 Describing Vibration......3 1.2.2 Vibration Isolation.....6 1.2.2.1 Overview.
Module 4 : Deflection of Structures Lecture 4 : Strain Energy Method
 Module 4 : Deflection of Structures Lecture 4 : Strain Energy Method Objectives In this course you will learn the following Deflection by strain energy method. Evaluation of strain energy in member under
Module 4 : Deflection of Structures Lecture 4 : Strain Energy Method Objectives In this course you will learn the following Deflection by strain energy method. Evaluation of strain energy in member under
MECE 3321: Mechanics of Solids Chapter 6
 MECE 3321: Mechanics of Solids Chapter 6 Samantha Ramirez Beams Beams are long straight members that carry loads perpendicular to their longitudinal axis Beams are classified by the way they are supported
MECE 3321: Mechanics of Solids Chapter 6 Samantha Ramirez Beams Beams are long straight members that carry loads perpendicular to their longitudinal axis Beams are classified by the way they are supported
CIVL 8/7117 Chapter 12 - Structural Dynamics 1/75. To discuss the dynamics of a single-degree-of freedom springmass
 CIV 8/77 Chapter - /75 Introduction To discuss the dynamics of a single-degree-of freedom springmass system. To derive the finite element equations for the time-dependent stress analysis of the one-dimensional
CIV 8/77 Chapter - /75 Introduction To discuss the dynamics of a single-degree-of freedom springmass system. To derive the finite element equations for the time-dependent stress analysis of the one-dimensional
Members Subjected to Torsional Loads
 Members Subjected to Torsional Loads Torsion of circular shafts Definition of Torsion: Consider a shaft rigidly clamped at one end and twisted at the other end by a torque T = F.d applied in a plane perpendicular
Members Subjected to Torsional Loads Torsion of circular shafts Definition of Torsion: Consider a shaft rigidly clamped at one end and twisted at the other end by a torque T = F.d applied in a plane perpendicular
Materials: engineering, science, processing and design, 2nd edition Copyright (c)2010 Michael Ashby, Hugh Shercliff, David Cebon.
2010 Michael Ashby, Hugh Shercliff, David Cebon.") Modes of Loading (1) tension (a) (2) compression (b) (3) bending (c) (4) torsion (d) and combinations of them (e) Figure 4.2 1 Standard Solution to Elastic Problems Three common modes of loading: (a) tie
Modes of Loading (1) tension (a) (2) compression (b) (3) bending (c) (4) torsion (d) and combinations of them (e) Figure 4.2 1 Standard Solution to Elastic Problems Three common modes of loading: (a) tie
CHAPTER 5. Beam Theory
 CHPTER 5. Beam Theory SangJoon Shin School of Mechanical and erospace Engineering Seoul National University ctive eroelasticity and Rotorcraft Lab. 5. The Euler-Bernoulli assumptions One of its dimensions
CHPTER 5. Beam Theory SangJoon Shin School of Mechanical and erospace Engineering Seoul National University ctive eroelasticity and Rotorcraft Lab. 5. The Euler-Bernoulli assumptions One of its dimensions
Tuesday, February 11, Chapter 3. Load and Stress Analysis. Dr. Mohammad Suliman Abuhaiba, PE
 1 Chapter 3 Load and Stress Analysis 2 Chapter Outline Equilibrium & Free-Body Diagrams Shear Force and Bending Moments in Beams Singularity Functions Stress Cartesian Stress Components Mohr s Circle for
1 Chapter 3 Load and Stress Analysis 2 Chapter Outline Equilibrium & Free-Body Diagrams Shear Force and Bending Moments in Beams Singularity Functions Stress Cartesian Stress Components Mohr s Circle for
Final Exam Solution Dynamics :45 12:15. Problem 1 Bateau
 Final Exam Solution Dynamics 2 191157140 31-01-2013 8:45 12:15 Problem 1 Bateau Bateau is a trapeze act by Cirque du Soleil in which artists perform aerial maneuvers on a boat shaped structure. The boat
Final Exam Solution Dynamics 2 191157140 31-01-2013 8:45 12:15 Problem 1 Bateau Bateau is a trapeze act by Cirque du Soleil in which artists perform aerial maneuvers on a boat shaped structure. The boat
4.5 The framework element stiffness matrix
 45 The framework element stiffness matri Consider a 1 degree-of-freedom element that is straight prismatic and symmetric about both principal cross-sectional aes For such a section the shear center coincides
45 The framework element stiffness matri Consider a 1 degree-of-freedom element that is straight prismatic and symmetric about both principal cross-sectional aes For such a section the shear center coincides
Review of Strain Energy Methods and Introduction to Stiffness Matrix Methods of Structural Analysis
 uke University epartment of Civil and Environmental Engineering CEE 42L. Matrix Structural Analysis Henri P. Gavin Fall, 22 Review of Strain Energy Methods and Introduction to Stiffness Matrix Methods
uke University epartment of Civil and Environmental Engineering CEE 42L. Matrix Structural Analysis Henri P. Gavin Fall, 22 Review of Strain Energy Methods and Introduction to Stiffness Matrix Methods
A HIGHER-ORDER BEAM THEORY FOR COMPOSITE BOX BEAMS
 A HIGHER-ORDER BEAM THEORY FOR COMPOSITE BOX BEAMS A. Kroker, W. Becker TU Darmstadt, Department of Mechanical Engineering, Chair of Structural Mechanics Hochschulstr. 1, D-64289 Darmstadt, Germany kroker@mechanik.tu-darmstadt.de,
A HIGHER-ORDER BEAM THEORY FOR COMPOSITE BOX BEAMS A. Kroker, W. Becker TU Darmstadt, Department of Mechanical Engineering, Chair of Structural Mechanics Hochschulstr. 1, D-64289 Darmstadt, Germany kroker@mechanik.tu-darmstadt.de,
FLEXIBILITY METHOD FOR INDETERMINATE FRAMES
 UNIT - I FLEXIBILITY METHOD FOR INDETERMINATE FRAMES 1. What is meant by indeterminate structures? Structures that do not satisfy the conditions of equilibrium are called indeterminate structure. These
UNIT - I FLEXIBILITY METHOD FOR INDETERMINATE FRAMES 1. What is meant by indeterminate structures? Structures that do not satisfy the conditions of equilibrium are called indeterminate structure. These
Dynamic Green Function Solution of Beams Under a Moving Load with Dierent Boundary Conditions
 Transaction B: Mechanical Engineering Vol. 16, No. 3, pp. 273{279 c Sharif University of Technology, June 2009 Research Note Dynamic Green Function Solution of Beams Under a Moving Load with Dierent Boundary
Transaction B: Mechanical Engineering Vol. 16, No. 3, pp. 273{279 c Sharif University of Technology, June 2009 Research Note Dynamic Green Function Solution of Beams Under a Moving Load with Dierent Boundary
Mechanical Design in Optical Engineering
 Torsion Torsion: Torsion refers to the twisting of a structural member that is loaded by couples (torque) that produce rotation about the member s longitudinal axis. In other words, the member is loaded
Torsion Torsion: Torsion refers to the twisting of a structural member that is loaded by couples (torque) that produce rotation about the member s longitudinal axis. In other words, the member is loaded
1. Multiple Degree-of-Freedom (MDOF) Systems: Introduction
 Systems: Introduction") 1. Multiple Degree-of-Freedom (MDOF) Systems: Introduction Lesson Objectives: 1) List examples of MDOF structural systems and state assumptions of the idealizations. 2) Formulate the equation of motion
1. Multiple Degree-of-Freedom (MDOF) Systems: Introduction Lesson Objectives: 1) List examples of MDOF structural systems and state assumptions of the idealizations. 2) Formulate the equation of motion
Vibration Dynamics and Control
 Giancarlo Genta Vibration Dynamics and Control Spri ringer Contents Series Preface Preface Symbols vii ix xxi Introduction 1 I Dynamics of Linear, Time Invariant, Systems 23 1 Conservative Discrete Vibrating
Giancarlo Genta Vibration Dynamics and Control Spri ringer Contents Series Preface Preface Symbols vii ix xxi Introduction 1 I Dynamics of Linear, Time Invariant, Systems 23 1 Conservative Discrete Vibrating
Static & Dynamic. Analysis of Structures. Edward L.Wilson. University of California, Berkeley. Fourth Edition. Professor Emeritus of Civil Engineering
 Static & Dynamic Analysis of Structures A Physical Approach With Emphasis on Earthquake Engineering Edward LWilson Professor Emeritus of Civil Engineering University of California, Berkeley Fourth Edition
Static & Dynamic Analysis of Structures A Physical Approach With Emphasis on Earthquake Engineering Edward LWilson Professor Emeritus of Civil Engineering University of California, Berkeley Fourth Edition
9.1 Introduction to bifurcation of equilibrium and structural
 Module 9 Stability and Buckling Readings: BC Ch 14 earning Objectives Understand the basic concept of structural instability and bifurcation of equilibrium. Derive the basic buckling load of beams subject
Module 9 Stability and Buckling Readings: BC Ch 14 earning Objectives Understand the basic concept of structural instability and bifurcation of equilibrium. Derive the basic buckling load of beams subject
PES Institute of Technology
 PES Institute of Technology Bangalore south campus, Bangalore-5460100 Department of Mechanical Engineering Faculty name : Madhu M Date: 29/06/2012 SEM : 3 rd A SEC Subject : MECHANICS OF MATERIALS Subject
PES Institute of Technology Bangalore south campus, Bangalore-5460100 Department of Mechanical Engineering Faculty name : Madhu M Date: 29/06/2012 SEM : 3 rd A SEC Subject : MECHANICS OF MATERIALS Subject
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VI SEMESTER ME6603 FINITE ELEMENT ANALYSIS Regulation 013 SUBJECT YEAR /SEM: III
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VI SEMESTER ME6603 FINITE ELEMENT ANALYSIS Regulation 013 SUBJECT YEAR /SEM: III
ANALYSIS OF HIGHRISE BUILDING STRUCTURE WITH SETBACK SUBJECT TO EARTHQUAKE GROUND MOTIONS
 ANALYSIS OF HIGHRISE BUILDING SRUCURE WIH SEBACK SUBJEC O EARHQUAKE GROUND MOIONS 157 Xiaojun ZHANG 1 And John L MEEK SUMMARY he earthquake response behaviour of unframed highrise buildings with setbacks
ANALYSIS OF HIGHRISE BUILDING SRUCURE WIH SEBACK SUBJEC O EARHQUAKE GROUND MOIONS 157 Xiaojun ZHANG 1 And John L MEEK SUMMARY he earthquake response behaviour of unframed highrise buildings with setbacks
MODIFIED HYPERBOLIC SHEAR DEFORMATION THEORY FOR STATIC FLEXURE ANALYSIS OF THICK ISOTROPIC BEAM
 MODIFIED HYPERBOLIC SHEAR DEFORMATION THEORY FOR STATIC FLEXURE ANALYSIS OF THICK ISOTROPIC BEAM S. Jasotharan * and I.R.A. Weerasekera University of Moratuwa, Moratuwa, Sri Lanka * E-Mail: jasos91@hotmail.com,
MODIFIED HYPERBOLIC SHEAR DEFORMATION THEORY FOR STATIC FLEXURE ANALYSIS OF THICK ISOTROPIC BEAM S. Jasotharan * and I.R.A. Weerasekera University of Moratuwa, Moratuwa, Sri Lanka * E-Mail: jasos91@hotmail.com,
6. Bending CHAPTER OBJECTIVES
 CHAPTER OBJECTIVES Determine stress in members caused by bending Discuss how to establish shear and moment diagrams for a beam or shaft Determine largest shear and moment in a member, and specify where
CHAPTER OBJECTIVES Determine stress in members caused by bending Discuss how to establish shear and moment diagrams for a beam or shaft Determine largest shear and moment in a member, and specify where
Shafts: Torsion of Circular Shafts Reading: Crandall, Dahl and Lardner 6.2, 6.3
 M9 Shafts: Torsion of Circular Shafts Reading: Crandall, Dahl and Lardner 6., 6.3 A shaft is a structural member which is long and slender and subject to a torque (moment) acting about its long axis. We
M9 Shafts: Torsion of Circular Shafts Reading: Crandall, Dahl and Lardner 6., 6.3 A shaft is a structural member which is long and slender and subject to a torque (moment) acting about its long axis. We
Structural Dynamics Lecture 7. Outline of Lecture 7. Multi-Degree-of-Freedom Systems (cont.) System Reduction. Vibration due to Movable Supports.
 System Reduction. Vibration due to Movable Supports.") Outline of Multi-Degree-of-Freedom Systems (cont.) System Reduction. Truncated Modal Expansion with Quasi-Static Correction. Guyan Reduction. Vibration due to Movable Supports. Earthquake Excitations.
Outline of Multi-Degree-of-Freedom Systems (cont.) System Reduction. Truncated Modal Expansion with Quasi-Static Correction. Guyan Reduction. Vibration due to Movable Supports. Earthquake Excitations.
MITOCW MITRES2_002S10linear_lec07_300k-mp4
 MITOCW MITRES2_002S10linear_lec07_300k-mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources
MITOCW MITRES2_002S10linear_lec07_300k-mp4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources
Dynamics of structures
 Dynamics of structures 2.Vibrations: single degree of freedom system Arnaud Deraemaeker (aderaema@ulb.ac.be) 1 Outline of the chapter *One degree of freedom systems in real life Hypothesis Examples *Response
Dynamics of structures 2.Vibrations: single degree of freedom system Arnaud Deraemaeker (aderaema@ulb.ac.be) 1 Outline of the chapter *One degree of freedom systems in real life Hypothesis Examples *Response
: APPLIED MECHANICS & STRENGTH OF MATERIALS COURSE CODE : 4021 COURSE CATEGORY : A PERIODS/ WEEK : 5 PERIODS/ SEMESTER : 75 CREDIT : 5 TIME SCHEDULE
 COURSE TITLE : APPLIED MECHANICS & STRENGTH OF MATERIALS COURSE CODE : 4021 COURSE CATEGORY : A PERIODS/ WEEK : 5 PERIODS/ SEMESTER : 75 CREDIT : 5 TIME SCHEDULE MODULE TOPIC PERIODS 1 Simple stresses
COURSE TITLE : APPLIED MECHANICS & STRENGTH OF MATERIALS COURSE CODE : 4021 COURSE CATEGORY : A PERIODS/ WEEK : 5 PERIODS/ SEMESTER : 75 CREDIT : 5 TIME SCHEDULE MODULE TOPIC PERIODS 1 Simple stresses
Mechanics of Materials Primer
 Mechanics of Materials rimer Notation: A = area (net = with holes, bearing = in contact, etc...) b = total width of material at a horizontal section d = diameter of a hole D = symbol for diameter E = modulus
Mechanics of Materials rimer Notation: A = area (net = with holes, bearing = in contact, etc...) b = total width of material at a horizontal section d = diameter of a hole D = symbol for diameter E = modulus
Section 6: PRISMATIC BEAMS. Beam Theory
 Beam Theory There are two types of beam theory aailable to craft beam element formulations from. They are Bernoulli-Euler beam theory Timoshenko beam theory One learns the details of Bernoulli-Euler beam
Beam Theory There are two types of beam theory aailable to craft beam element formulations from. They are Bernoulli-Euler beam theory Timoshenko beam theory One learns the details of Bernoulli-Euler beam
MECHANICS OF MATERIALS
 STATICS AND MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr, John T. DeWolf David E Mazurek \Cawect Mc / iur/» Craw SugomcT Hilt Introduction 1 1.1 What is Mechanics? 2 1.2 Fundamental
STATICS AND MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr, John T. DeWolf David E Mazurek \Cawect Mc / iur/» Craw SugomcT Hilt Introduction 1 1.1 What is Mechanics? 2 1.2 Fundamental
CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS
 61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and
61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and
Symmetric Bending of Beams
 Symmetric Bending of Beams beam is any long structural member on which loads act perpendicular to the longitudinal axis. Learning objectives Understand the theory, its limitations and its applications
Symmetric Bending of Beams beam is any long structural member on which loads act perpendicular to the longitudinal axis. Learning objectives Understand the theory, its limitations and its applications
2. Determine the deflection at C of the beam given in fig below. Use principal of virtual work. W L/2 B A L C
 CE-1259, Strength of Materials UNIT I STRESS, STRAIN DEFORMATION OF SOLIDS Part -A 1. Define strain energy density. 2. State Maxwell s reciprocal theorem. 3. Define proof resilience. 4. State Castigliano
CE-1259, Strength of Materials UNIT I STRESS, STRAIN DEFORMATION OF SOLIDS Part -A 1. Define strain energy density. 2. State Maxwell s reciprocal theorem. 3. Define proof resilience. 4. State Castigliano
Transactions on Modelling and Simulation vol 18, 1997 WIT Press, ISSN X
 An integral equation formulation of the coupled vibrations of uniform Timoshenko beams Masa. Tanaka & A. N. Bercin Department of Mechanical Systems Engineering, Shinshu University 500 Wakasato, Nagano
An integral equation formulation of the coupled vibrations of uniform Timoshenko beams Masa. Tanaka & A. N. Bercin Department of Mechanical Systems Engineering, Shinshu University 500 Wakasato, Nagano
COURSE TITLE : APPLIED MECHANICS & STRENGTH OF MATERIALS COURSE CODE : 4017 COURSE CATEGORY : A PERIODS/WEEK : 6 PERIODS/ SEMESTER : 108 CREDITS : 5
 COURSE TITLE : APPLIED MECHANICS & STRENGTH OF MATERIALS COURSE CODE : 4017 COURSE CATEGORY : A PERIODS/WEEK : 6 PERIODS/ SEMESTER : 108 CREDITS : 5 TIME SCHEDULE MODULE TOPICS PERIODS 1 Simple stresses
COURSE TITLE : APPLIED MECHANICS & STRENGTH OF MATERIALS COURSE CODE : 4017 COURSE CATEGORY : A PERIODS/WEEK : 6 PERIODS/ SEMESTER : 108 CREDITS : 5 TIME SCHEDULE MODULE TOPICS PERIODS 1 Simple stresses
FINAL EXAMINATION. (CE130-2 Mechanics of Materials)
") UNIVERSITY OF CLIFORNI, ERKELEY FLL SEMESTER 001 FINL EXMINTION (CE130- Mechanics of Materials) Problem 1: (15 points) pinned -bar structure is shown in Figure 1. There is an external force, W = 5000N,
UNIVERSITY OF CLIFORNI, ERKELEY FLL SEMESTER 001 FINL EXMINTION (CE130- Mechanics of Materials) Problem 1: (15 points) pinned -bar structure is shown in Figure 1. There is an external force, W = 5000N,
Program System for Machine Dynamics. Abstract. Version 5.0 November 2017
 Program System for Machine Dynamics Abstract Version 5.0 November 2017 Ingenieur-Büro Klement Lerchenweg 2 D 65428 Rüsselsheim Phone +49/6142/55951 hd.klement@t-online.de What is MADYN? The program system
Program System for Machine Dynamics Abstract Version 5.0 November 2017 Ingenieur-Büro Klement Lerchenweg 2 D 65428 Rüsselsheim Phone +49/6142/55951 hd.klement@t-online.de What is MADYN? The program system
IN-PLANE VIBRATIONS OF CIRCULAR CURVED BEAMS WITH A TRANSVERSE OPEN CRACK 1. INTRODUCTION
 Mathematical and Computational Applications, Vol. 11, No. 1, pp. 1-10, 006. Association for Scientific Research IN-PLANE VIBRATIONS OF CIRCULAR CURVED BEAMS WITH A TRANSVERSE OPEN CRACK Department of Mechanical
Mathematical and Computational Applications, Vol. 11, No. 1, pp. 1-10, 006. Association for Scientific Research IN-PLANE VIBRATIONS OF CIRCULAR CURVED BEAMS WITH A TRANSVERSE OPEN CRACK Department of Mechanical
2C9 Design for seismic and climate changes. Jiří Máca
 2C9 Design for seismic and climate changes Jiří Máca List of lectures 1. Elements of seismology and seismicity I 2. Elements of seismology and seismicity II 3. Dynamic analysis of single-degree-of-freedom
2C9 Design for seismic and climate changes Jiří Máca List of lectures 1. Elements of seismology and seismicity I 2. Elements of seismology and seismicity II 3. Dynamic analysis of single-degree-of-freedom
Chapter 12 Plate Bending Elements. Chapter 12 Plate Bending Elements
 CIVL 7/8117 Chapter 12 - Plate Bending Elements 1/34 Chapter 12 Plate Bending Elements Learning Objectives To introduce basic concepts of plate bending. To derive a common plate bending element stiffness
CIVL 7/8117 Chapter 12 - Plate Bending Elements 1/34 Chapter 12 Plate Bending Elements Learning Objectives To introduce basic concepts of plate bending. To derive a common plate bending element stiffness
ME Final Exam. PROBLEM NO. 4 Part A (2 points max.) M (x) y. z (neutral axis) beam cross-sec+on. 20 kip ft. 0.2 ft. 10 ft. 0.1 ft.
 M (x) y. z (neutral axis) beam cross-sec+on. 20 kip ft. 0.2 ft. 10 ft. 0.1 ft.") ME 323 - Final Exam Name December 15, 2015 Instructor (circle) PROEM NO. 4 Part A (2 points max.) Krousgrill 11:30AM-12:20PM Ghosh 2:30-3:20PM Gonzalez 12:30-1:20PM Zhao 4:30-5:20PM M (x) y 20 kip ft 0.2
ME 323 - Final Exam Name December 15, 2015 Instructor (circle) PROEM NO. 4 Part A (2 points max.) Krousgrill 11:30AM-12:20PM Ghosh 2:30-3:20PM Gonzalez 12:30-1:20PM Zhao 4:30-5:20PM M (x) y 20 kip ft 0.2
(Refer Slide Time: 2:43-03:02)
") Strength of Materials Prof. S. K. Bhattacharyya Department of Civil Engineering Indian Institute of Technology, Kharagpur Lecture - 34 Combined Stresses I Welcome to the first lesson of the eighth module
Strength of Materials Prof. S. K. Bhattacharyya Department of Civil Engineering Indian Institute of Technology, Kharagpur Lecture - 34 Combined Stresses I Welcome to the first lesson of the eighth module
Analysis of Axially Loaded Non-prismatic Beams with General End Restraints Using Differential Quadrature Method
 ISBN 978-93-84422-56-1 Proceedings of International Conference on Architecture, Structure and Civil Engineering (ICASCE'15 Antalya (Turkey Sept. 7-8, 2015 pp. 1-7 Analysis of Axially Loaded Non-prismatic
ISBN 978-93-84422-56-1 Proceedings of International Conference on Architecture, Structure and Civil Engineering (ICASCE'15 Antalya (Turkey Sept. 7-8, 2015 pp. 1-7 Analysis of Axially Loaded Non-prismatic
Level 7 Postgraduate Diploma in Engineering Computational mechanics using finite element method
 9210-203 Level 7 Postgraduate Diploma in Engineering Computational mechanics using finite element method You should have the following for this examination one answer book No additional data is attached
9210-203 Level 7 Postgraduate Diploma in Engineering Computational mechanics using finite element method You should have the following for this examination one answer book No additional data is attached
PDDC 1 st Semester Civil Engineering Department Assignments of Mechanics of Solids [ ] Introduction, Fundamentals of Statics
![PDDC 1 st Semester Civil Engineering Department Assignments of Mechanics of Solids [ ] Introduction, Fundamentals of Statics](/thumbs/92/109382806.jpg "PDDC 1 st Semester Civil Engineering Department Assignments of Mechanics of Solids [ ] Introduction, Fundamentals of Statics") Page1 PDDC 1 st Semester Civil Engineering Department Assignments of Mechanics of Solids [2910601] Introduction, Fundamentals of Statics 1. Differentiate between Scalar and Vector quantity. Write S.I.
Page1 PDDC 1 st Semester Civil Engineering Department Assignments of Mechanics of Solids [2910601] Introduction, Fundamentals of Statics 1. Differentiate between Scalar and Vector quantity. Write S.I.
Name (Print) ME Mechanics of Materials Exam # 2 Date: March 29, 2017 Time: 8:00 10:00 PM - Location: WTHR 200
 ME Mechanics of Materials Exam # 2 Date: March 29, 2017 Time: 8:00 10:00 PM - Location: WTHR 200") Name (Print) (Last) (First) Instructions: ME 323 - Mechanics of Materials Exam # 2 Date: Time: 8:00 10:00 PM - Location: WTHR 200 Circle your lecturer s name and your class meeting time. Koslowski Zhao
Name (Print) (Last) (First) Instructions: ME 323 - Mechanics of Materials Exam # 2 Date: Time: 8:00 10:00 PM - Location: WTHR 200 Circle your lecturer s name and your class meeting time. Koslowski Zhao
STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS
 1 UNIT I STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS 1. Define: Stress When an external force acts on a body, it undergoes deformation. At the same time the body resists deformation. The
1 UNIT I STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS 1. Define: Stress When an external force acts on a body, it undergoes deformation. At the same time the body resists deformation. The
Shape Optimization of Revolute Single Link Flexible Robotic Manipulator for Vibration Suppression
 15 th National Conference on Machines and Mechanisms NaCoMM011-157 Shape Optimization of Revolute Single Link Flexible Robotic Manipulator for Vibration Suppression Sachindra Mahto Abstract In this work,
15 th National Conference on Machines and Mechanisms NaCoMM011-157 Shape Optimization of Revolute Single Link Flexible Robotic Manipulator for Vibration Suppression Sachindra Mahto Abstract In this work,
Back Matter Index The McGraw Hill Companies, 2004
 INDEX A Absolute viscosity, 294 Active zone, 468 Adjoint, 452 Admissible functions, 132 Air, 294 ALGOR, 12 Amplitude, 389, 391 Amplitude ratio, 396 ANSYS, 12 Applications fluid mechanics, 293 326. See
INDEX A Absolute viscosity, 294 Active zone, 468 Adjoint, 452 Admissible functions, 132 Air, 294 ALGOR, 12 Amplitude, 389, 391 Amplitude ratio, 396 ANSYS, 12 Applications fluid mechanics, 293 326. See
December 10, PROBLEM NO points max.
 PROBLEM NO. 1 25 points max. PROBLEM NO. 2 25 points max. B 3A A C D A H k P L 2L Given: Consider the structure above that is made up of rod segments BC and DH, a spring of stiffness k and rigid connectors
PROBLEM NO. 1 25 points max. PROBLEM NO. 2 25 points max. B 3A A C D A H k P L 2L Given: Consider the structure above that is made up of rod segments BC and DH, a spring of stiffness k and rigid connectors
Module 3 : Equilibrium of rods and plates Lecture 15 : Torsion of rods. The Lecture Contains: Torsion of Rods. Torsional Energy
 The Lecture Contains: Torsion of Rods Torsional Energy This lecture is adopted from the following book 1. Theory of Elasticity, 3 rd edition by Landau and Lifshitz. Course of Theoretical Physics, vol-7
The Lecture Contains: Torsion of Rods Torsional Energy This lecture is adopted from the following book 1. Theory of Elasticity, 3 rd edition by Landau and Lifshitz. Course of Theoretical Physics, vol-7
Finite Element Analysis Lecture 1. Dr./ Ahmed Nagib
 Finite Element Analysis Lecture 1 Dr./ Ahmed Nagib April 30, 2016 Research and Development Mathematical Model Mathematical Model Mathematical Model Finite Element Analysis The linear equation of motion
Finite Element Analysis Lecture 1 Dr./ Ahmed Nagib April 30, 2016 Research and Development Mathematical Model Mathematical Model Mathematical Model Finite Element Analysis The linear equation of motion
Deflection profile analysis of beams on two-parameter elastic subgrade
 1(213) 263 282 Deflection profile analysis of beams on two-parameter elastic subgrade Abstract A procedure involving spectral Galerkin and integral transformation methods has been developed and applied
1(213) 263 282 Deflection profile analysis of beams on two-parameter elastic subgrade Abstract A procedure involving spectral Galerkin and integral transformation methods has been developed and applied
General elastic beam with an elastic foundation
 General elastic beam with an elastic foundation Figure 1 shows a beam-column on an elastic foundation. The beam is connected to a continuous series of foundation springs. The other end of the foundation
General elastic beam with an elastic foundation Figure 1 shows a beam-column on an elastic foundation. The beam is connected to a continuous series of foundation springs. The other end of the foundation
M5 Simple Beam Theory (continued)
") M5 Simple Beam Theory (continued) Reading: Crandall, Dahl and Lardner 7.-7.6 In the previous lecture we had reached the point of obtaining 5 equations, 5 unknowns by application of equations of elasticity
M5 Simple Beam Theory (continued) Reading: Crandall, Dahl and Lardner 7.-7.6 In the previous lecture we had reached the point of obtaining 5 equations, 5 unknowns by application of equations of elasticity