Lecture 4. Applications
|
|
|
- Blaise Powell
- 6 years ago
- Views:
Transcription
1 Lecture 4. Applications
2 Summary Tools such as HyTech, CheckMate, Uppaal, Kronos have been used in many contexts typically to verify safety of a control design or to get tight bounds on parameters (e.g. steam boiler, audio control) This lecture shows where hybrid systems theory can fit in some application domains
3 Applications Outline! Embedded Control Systems " Autonomous Mobile Robots " Biological Systems
4 Embedded Controller Development Process For Automobile Transmissions Former Practice redesign feature specification describe control logic using relay-ladder diagrams fix bugs code write assembly code for the control microprocessor test on engine/ vehicle drive the car around the test track production hope for the best
5 Automotive Embedded Controller Design: State of the Practice Computer-Aided Control System Design feature specification executable spec. code simulation test on engine/ vehicle code generation production hardware in the loop

6 Executable Specifications Using MATLAB/Simulink/Stateflow

7 Transmission Control Logic
8 Opportunity to Apply Formal Verification Techniques Computer-Aided Control System Design feature specification executable spec. code test on engine/ vehicle simulation code generation model checking Objective: Verify feature behavior for the entire range of operating conditions. production hardware in the loop
9 Automotive Engine Control in Cut-off Mode Control law: Decide when to inject air/fuel for torque to minimize acceleration peaks during the cut-off operation. Problem: Verify the event-driven implementation of a control law designed in continuous time. Application of CheckMate due to Krogh et al
10 Automotive Powertrain Model Model from Magneti Marelli Engine Control Division Four-stroke, four cylinder engine Continuous-time powertrain model Hybrid model for cylinder cycles
11 CheckMate Model h000 h001 h010 h011 h100 predictor h000 h001 h010 h011 h100 power train h101 h110 h111 dynamics q h101 angle driveline h110 Mux M3 q h111 NOT NOT finish_line angle_trigger XOR M4 reach_180 NOT not1 start u torque NOT x1 reach_zero not2 M2 m x2 u simula simula M1 Mux Demux angle (degrees) x1 v x2
12 Continuous Dynamics x = Ax + Bu u = 0 (no air-fuel) or 10 x 1 = engine block angle x 2 = wheel revolution speed (radians) x 3 = axle torsion angle (in radians) x 4 = crankshaft revolution speed (rpm) x 5 = crankshaft angle (degrees)
13 Controller Specification Sliding mode control law derived in continuous time Hybrid implementation due to discrete torque decisions Remain within acceleration limits while tracking a sliding mode.
14 Cylinder Cycle Exhaust Phase_change Intake Phase_change Phase_change Combustion Phase_change Compression Control decision to apply torque on the power stroke must be made before the intake stroke three step lookahead.

15 Crankshaft Angle Rate Logic h000 h001 h010 h011 predictor Cylinder state transitions occur every h o. Crankshaft angle switches h001 h010 between 0 o and 180 o, angle rate h011 switches between +rate q and -rate. h100 h101 h110 h111 h100 h101 angle driveline h110 Mux M3 q h111 NOT NOT finish_line angle_trigger XOR M4 reach_180 NOT not1 start u torque NOT x1 reach_zero not2 M2 m x2 u simula si mula M1 Mux Demux angle (degrees) x1 v x2

16 Predictive Control Logic The discrete state indicates the torque decisions for the current and next two power strokes (i.e., for three of the four cylinders). Transitions from each state depend on whether predicted state for the next power stroke is closer to the sliding mode with or without torque. The 9th state (not shown) is the end simulation state--reachable from any of the other 8 states.
17 Flowpipe for One Discrete Sequence
18 Applications Outline # Embedded Control Systems! Autonomous Mobile Robots " Biological Systems

19 Programming Interacting Autonomous Robots Many modes Individual modes are well understood, but not their interaction. Software design Modes designed bottom-up Protocols top-down Modular design to ensure reusability Tasks: Formation control, cooperative control
20 Software Design Methodology CHARON Code (High level language) CHARON CHARONto to Java Translator Drivers Java Libraries Java Code Control Code Generator Simulator Code Generator Human Interface



21 Vision-Based Control: Mode Switching
22 Reactive Vision Based Controllers Control Wall- Following Avoid Obstacle Collision Recovery Motion Controller Range Mapper Robot Position Estimator Target Detector Edge Detector Collision Detector Color Blob Finder Frame Grabber Actuators
23 Controllers for Maintaining Formation Y ψ 1 2 v 1, ω 1 Y v 1, ω 1 d (x 2,y 2,θ 2 ) l 12 v 2, ω 2 (x 1,y 1,θ 1 ) d (x 3,y 3,θ 3 ) l 12 (x 1,y 1,θ 1 ) v 3, ω 3 v 2, ω 2 l 23 (x 2,y 2,θ 2 ) v j = cos γ sin X ( b + ωˆ cos(ˆ θ Estimate of relative position, orientation, 1 linear ω = and [ s sin angular γ + l cos velocities γ ( b + ωˆ ) + required! v sin(ˆ θ θ )] j s ij d j ij ij l ij ij ij γ ij ij ij ij i ) + vˆ i i i i θ i j ) j X


24 Multirobot Coordination R 1 R 2 R 3 R 2 R 3 R 1
25 Rules for Mode Switching l 13 l 13 = l 23 R 2 l 12 r 2 l 13 = l 23 + l 12 Autonomous Navigation l 23 R 3 l 13 R 1 l-ψ 23 l 13 = l 23 - l 12 r 2 r 1 l 12 l- l l-ψ 13 R r 1 l 12 = l 13 + l 23 l 12 l 23 r 1 r 2 Sensor constraints

 2 R")
26 Leader Follower and Obstacle Avoidance Leader is teleoperated Leader is autonomous (l R 12,,ψ 12 ) 2 R 1 l O2 Obs R 1 R 2 l 12


27 Mode Switching and Maintain Formation
28 Applications Outline # Embedded Control Systems # Autonomous Mobile Robots! Biological Systems
29 Cellular Networks "Networks of interacting biomolecules carry out many essential functions in living cells (gene regulation, protein production) "Both positive and negative feedback loops "Design principles poorly understood "Large amounts of data is becoming available "Beyond Human Genome: Behavioral models of cellular networks "Modeling becoming increasingly relevant as an aid to narrow the space of experiments
30 Regulatory Networks gene expression negative - START gene STOP regulation positive + transcription translation nascent protein cell-to-cell signaling chemical reaction
31 Hybrid Modeling of Biological Systems Traditionally, d ( LuxR ) biological systems LuxR = T are modeled using smooth functions. l luxr d [ x ] dt H sp = synthesis decay ± transform ± transport Φ( X, κ Xm, ν Xm ) dt b d r Ai LuxR + r Co k LuxR regulation LuxR / Ai CRP negative positive + - START LuxR / Ai luxr gene G transcription translation STOP X κ Xm sw ν Xm 2 X sw X Ai chemical reaction Ai protein LuxR d( luxr ) = Tc [ Φ( CRP, κ dt (1 Φ( LuxR Ai, κ luxr H RNA k G luxr CRP LuxR Ai, ν, ν CRP ) LuxR Ai )) + b )
32 Hybrid Modeling regulatory protein/complex Nonlinear dynamics (proteins involved in chemical reactions) Discrete jump (mrna) mode Linear dynamics (proteins not involved in chemical reactions) Essentially hybrid system high conc continuous model low conc stochastic model At low concentrations, a continuous approximation model might not be appropriate. Instead, a stochastic model should be used. In some cases, the biological description of a system is itself hybrid.

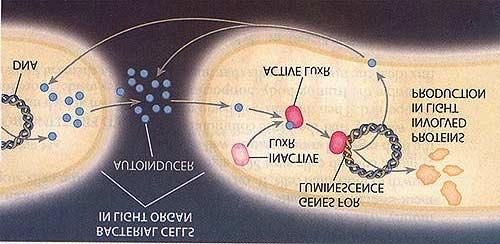
33 Luminescence / Quorum Sensing in Vibrio Fischeri
34 Luminescence Regulation O L + CRP camp - lux box O R luxr luxicdabeg CRP binding site - LuxR Ai + LuxI LuxA LuxR LuxB Ai Substrate luciferase
35 lum x & = Ax+ b 10 x8 x 8sw Reachability x 8 = x 8sw x = 8 x 8sw ( x 8 x & = Ax+ Co non-lum ) b 00 x8 x 8sw = Ax b i0 c0 = 0, c1 = 1 Under what conditions can the x4 bacterium switch H RNATlon Tc ( the ci + light? b ) = x 7 bi0 = 0 x 0 x & + x 8 lum dynamics x 8 sw switching surface nonlum dynamics ( x 7 Ai ) ( L I )
36 Simulation Results external A i (input) switch history luminesence (output) switch history concentrations for various entities
37 Summary $ Hybrid systems are necessary to model some biological regulatory networks. $ The simulation results of the luminescence control in Vibrio fischeri are in accordance with phenomena observed in experiments. $ Modeling concepts such as hierarchy, concurrency, reuse, are relevant for modular specifications $ Exploiting the structure of real biological systems will be essential to meet the challenge posed by the enormous complexity of biological regulatory networks.
38 Conclusions " A rich variety of domains match hybrid systems paradigm " Traditional benefits: safety verification, design of hybrid controllers " Formal models can be beneficial in more ways: modeling, understanding, programming, simulation " Emerging potential for integration with software engineering design tools
An introduction to hybrid systems theory and applications. Thanks to. Goals for this mini-course. Acknowledgments. Some references
 An introduction to hybrid systems theory and applications Thanks to School Organizers Maurice Heemels Bart De Schutter George J Pappas Departments of ESE and CIS University of Pennsylvania pappasg@eeupennedu
An introduction to hybrid systems theory and applications Thanks to School Organizers Maurice Heemels Bart De Schutter George J Pappas Departments of ESE and CIS University of Pennsylvania pappasg@eeupennedu
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March Overview of dynamic control systems
 ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
Hybrid Modeling and Simulation of Biomolecular Networks
 Hybrid Modeling and Simulation of Biomolecular Networks Rajeev Alur, Calin Belta, Franjo Ivančić, Vijay Kumar, Max Mintz, George J. Pappas, Harvey Rubin, and Jonathan Schug University of Pennsylvania biohybrid@grasp.cis.upenn.edu
Hybrid Modeling and Simulation of Biomolecular Networks Rajeev Alur, Calin Belta, Franjo Ivančić, Vijay Kumar, Max Mintz, George J. Pappas, Harvey Rubin, and Jonathan Schug University of Pennsylvania biohybrid@grasp.cis.upenn.edu
ESE 601: Hybrid Systems. Instructor: Agung Julius Teaching assistant: Ali Ahmadzadeh
 ESE 601: Hybrid Systems Instructor: Agung Julius Teaching assistant: Ali Ahmadzadeh Schedule Class schedule : Monday & Wednesday 1500 1630 Towne 305 Office hours : to be discussed (3 hrs/week) Emails:
ESE 601: Hybrid Systems Instructor: Agung Julius Teaching assistant: Ali Ahmadzadeh Schedule Class schedule : Monday & Wednesday 1500 1630 Towne 305 Office hours : to be discussed (3 hrs/week) Emails:
We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill.
 Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill.") We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill. 2.3.2. Steering control using point mass model: Open loop commands We consider
We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill. 2.3.2. Steering control using point mass model: Open loop commands We consider
Simulation of Gene Regulatory Networks
 Simulation of Gene Regulatory Networks Overview I have been assisting Professor Jacques Cohen at Brandeis University to explore and compare the the many available representations and interpretations of
Simulation of Gene Regulatory Networks Overview I have been assisting Professor Jacques Cohen at Brandeis University to explore and compare the the many available representations and interpretations of
Using Theorem Provers to Guarantee Closed-Loop Properties
 Using Theorem Provers to Guarantee Closed-Loop Properties Nikos Aréchiga Sarah Loos André Platzer Bruce Krogh Carnegie Mellon University April 27, 2012 Aréchiga, Loos, Platzer, Krogh (CMU) Theorem Provers
Using Theorem Provers to Guarantee Closed-Loop Properties Nikos Aréchiga Sarah Loos André Platzer Bruce Krogh Carnegie Mellon University April 27, 2012 Aréchiga, Loos, Platzer, Krogh (CMU) Theorem Provers
Ranking Verification Counterexamples: An Invariant guided approach
 Ranking Verification Counterexamples: An Invariant guided approach Ansuman Banerjee Indian Statistical Institute Joint work with Pallab Dasgupta, Srobona Mitra and Harish Kumar Complex Systems Everywhere
Ranking Verification Counterexamples: An Invariant guided approach Ansuman Banerjee Indian Statistical Institute Joint work with Pallab Dasgupta, Srobona Mitra and Harish Kumar Complex Systems Everywhere
Biochemical Reactions and Logic Computation
 Biochemical Reactions and Logic Computation Biochemical Reactions and Biology Complex behaviors of a living organism originate from systems of biochemical reactions Jie-Hong Roland Jiang (Introduction
Biochemical Reactions and Logic Computation Biochemical Reactions and Biology Complex behaviors of a living organism originate from systems of biochemical reactions Jie-Hong Roland Jiang (Introduction
National Quali cations 2018
 H FOR X723/76/01 OFFICIAL USE National Quali cations 2018 Mark Engineering Science THURSDAY, 24 MAY 1:00 PM 3:00 PM *X7237601* Fill in these boxes and read what is printed below. Full name of centre Town
H FOR X723/76/01 OFFICIAL USE National Quali cations 2018 Mark Engineering Science THURSDAY, 24 MAY 1:00 PM 3:00 PM *X7237601* Fill in these boxes and read what is printed below. Full name of centre Town
Team-Exercises for DGC 100 Modelica Course
 Team-Exercises for DGC 100 Modelica Course Hubertus Tummescheit United Technologies Research Center, East Hartford, CT 06108. November 4, 2003 Abstract This document is a preliminary version and is going
Team-Exercises for DGC 100 Modelica Course Hubertus Tummescheit United Technologies Research Center, East Hartford, CT 06108. November 4, 2003 Abstract This document is a preliminary version and is going
Hybrid Quorum sensing in Vibrio harveyi- two component signalling
 Hybrid Quorum sensing in Vibrio harveyi- two component signalling Dr. M. Vijayalakshmi School of Chemical and Biotechnology SASTRA University Joint Initiative of IITs and IISc Funded by MHRD Page 1 of
Hybrid Quorum sensing in Vibrio harveyi- two component signalling Dr. M. Vijayalakshmi School of Chemical and Biotechnology SASTRA University Joint Initiative of IITs and IISc Funded by MHRD Page 1 of
PLANAR RIGID BODY MOTION: TRANSLATION &
 PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
Methodology for modeling, parameter estimation, and validation of powertrain torsional vibration
 Methodology for modeling, parameter estimation, and validation of powertrain torsional vibration Abstract Neda Nickmehr, Lars Eriksson, and Jan Åslund Dep. of Electrical Engineering, Linköping University,
Methodology for modeling, parameter estimation, and validation of powertrain torsional vibration Abstract Neda Nickmehr, Lars Eriksson, and Jan Åslund Dep. of Electrical Engineering, Linköping University,
DryVR: Data-driven verification and compositional reasoning for automotive systems
 DryVR: Data-driven verification and compositional reasoning for automotive systems Chuchu Fan, Bolun Qi, Sayan Mitra, Mahesh Viswannathan University of Illinois at Urbana-Champaign CAV 2017, Heidelberg,
DryVR: Data-driven verification and compositional reasoning for automotive systems Chuchu Fan, Bolun Qi, Sayan Mitra, Mahesh Viswannathan University of Illinois at Urbana-Champaign CAV 2017, Heidelberg,
Control of a Car-Like Vehicle with a Reference Model and Particularization
 Control of a Car-Like Vehicle with a Reference Model and Particularization Luis Gracia Josep Tornero Department of Systems and Control Engineering Polytechnic University of Valencia Camino de Vera s/n,
Control of a Car-Like Vehicle with a Reference Model and Particularization Luis Gracia Josep Tornero Department of Systems and Control Engineering Polytechnic University of Valencia Camino de Vera s/n,
Three Way Catalyst Control using PI-style Controller with HEGO Sensor Feedback
 Three Way Catalyst Control using PI-style Controller with HEGO Sensor Feedback Per Andersson, Lars Eriksson Dept. of Vehicular Systems, Linköping University, Sweden E-mail: {peran,larer}@isy.liu.se Abstract
Three Way Catalyst Control using PI-style Controller with HEGO Sensor Feedback Per Andersson, Lars Eriksson Dept. of Vehicular Systems, Linköping University, Sweden E-mail: {peran,larer}@isy.liu.se Abstract
General Definition of Torque, final. Lever Arm. General Definition of Torque 7/29/2010. Units of Chapter 10
 Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
CITY UNIVERSITY SCHOOL OF ENGINEERING AND MATHEMATICAL SCIENCES
 CITY UNIVERSITY SCHOOL OF ENGINEERING AND MATHEMATICAL SCIENCES AERONAUTICAL ENGINEERING MEng/BEng (Hons) AIR TRANSPORT ENGINEERING MEng/BEng (Hons) AIR TRANSPORT ENGINEERING BSc (Hons) AUTOMOTIVE AND
CITY UNIVERSITY SCHOOL OF ENGINEERING AND MATHEMATICAL SCIENCES AERONAUTICAL ENGINEERING MEng/BEng (Hons) AIR TRANSPORT ENGINEERING MEng/BEng (Hons) AIR TRANSPORT ENGINEERING BSc (Hons) AUTOMOTIVE AND
Multi-Robotic Systems
 CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
CHAPTER 9 Multi-Robotic Systems The topic of multi-robotic systems is quite popular now. It is believed that such systems can have the following benefits: Improved performance ( winning by numbers ) Distributed
Simple Car Dynamics. Outline. Claude Lacoursière HPC2N/VRlab, Umeå Universitet, Sweden, May 18, 2005
 Simple Car Dynamics Claude Lacoursière HPC2N/VRlab, Umeå Universitet, Sweden, and CMLabs Simulations, Montréal, Canada May 18, 2005 Typeset by FoilTEX May 16th 2005 Outline basics of vehicle dynamics different
Simple Car Dynamics Claude Lacoursière HPC2N/VRlab, Umeå Universitet, Sweden, and CMLabs Simulations, Montréal, Canada May 18, 2005 Typeset by FoilTEX May 16th 2005 Outline basics of vehicle dynamics different
NONLINEAR PATH CONTROL FOR A DIFFERENTIAL DRIVE MOBILE ROBOT
 NONLINEAR PATH CONTROL FOR A DIFFERENTIAL DRIVE MOBILE ROBOT Plamen PETROV Lubomir DIMITROV Technical University of Sofia Bulgaria Abstract. A nonlinear feedback path controller for a differential drive
NONLINEAR PATH CONTROL FOR A DIFFERENTIAL DRIVE MOBILE ROBOT Plamen PETROV Lubomir DIMITROV Technical University of Sofia Bulgaria Abstract. A nonlinear feedback path controller for a differential drive
Line following of a mobile robot
 Line following of a mobile robot May 18, 004 1 In brief... The project is about controlling a differential steering mobile robot so that it follows a specified track. Steering is achieved by setting different
Line following of a mobile robot May 18, 004 1 In brief... The project is about controlling a differential steering mobile robot so that it follows a specified track. Steering is achieved by setting different
Physical Modelling with Simscape Rick Hyde
 Physical Modelling with Simscape Rick Hyde 1 2013 The MathWorks, Inc. Outline Part 1: Introduction to Simscape Review approaches to modelling Overview of Simscape-based libraries Introduction to physical
Physical Modelling with Simscape Rick Hyde 1 2013 The MathWorks, Inc. Outline Part 1: Introduction to Simscape Review approaches to modelling Overview of Simscape-based libraries Introduction to physical
Welcome to Class 21!
 Welcome to Class 21! Introductory Biochemistry! Lecture 21: Outline and Objectives l Regulation of Gene Expression in Prokaryotes! l transcriptional regulation! l principles! l lac operon! l trp attenuation!
Welcome to Class 21! Introductory Biochemistry! Lecture 21: Outline and Objectives l Regulation of Gene Expression in Prokaryotes! l transcriptional regulation! l principles! l lac operon! l trp attenuation!
A synthetic oscillatory network of transcriptional regulators
 A synthetic oscillatory network of transcriptional regulators Michael B. Elowitz & Stanislas Leibler, Nature, 403, 2000 igem Team Heidelberg 2008 Journal Club Andreas Kühne Introduction Networks of interacting
A synthetic oscillatory network of transcriptional regulators Michael B. Elowitz & Stanislas Leibler, Nature, 403, 2000 igem Team Heidelberg 2008 Journal Club Andreas Kühne Introduction Networks of interacting
A Formal Model of Clock Domain Crossing and Automated Verification of Time-Triggered Hardware
 A Formal Model of Clock Domain Crossing and Automated Verification of Time-Triggered Hardware Julien Schmaltz Institute for Computing and Information Sciences Radboud University Nijmegen The Netherlands
A Formal Model of Clock Domain Crossing and Automated Verification of Time-Triggered Hardware Julien Schmaltz Institute for Computing and Information Sciences Radboud University Nijmegen The Netherlands
Exercise 8 - Turbocompressors
 Exercise 8 - Turbocompressors A turbocompressor TC) or turbocharger is a mechanical device used in internal combustion engines to enhance their power output. The basic idea of a TC is to force additional
Exercise 8 - Turbocompressors A turbocompressor TC) or turbocharger is a mechanical device used in internal combustion engines to enhance their power output. The basic idea of a TC is to force additional
Efficient Circuit Analysis
 Efficient Circuit Analysis Chris Myers, Nathan Barker, Kevin Jones, Hiroyuki Kuwahara, Scott Little, Curtis Madsen, Nam Nguyen, Robert Thacker, David Walter University of Utah CE Junior Seminar September
Efficient Circuit Analysis Chris Myers, Nathan Barker, Kevin Jones, Hiroyuki Kuwahara, Scott Little, Curtis Madsen, Nam Nguyen, Robert Thacker, David Walter University of Utah CE Junior Seminar September
Control. CSC752: Autonomous Robotic Systems. Ubbo Visser. March 9, Department of Computer Science University of Miami
 Control CSC752: Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami March 9, 2017 Outline 1 Control system 2 Controller Images from http://en.wikipedia.org/wiki/feed-forward
Control CSC752: Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami March 9, 2017 Outline 1 Control system 2 Controller Images from http://en.wikipedia.org/wiki/feed-forward
Phys101 Lectures 19, 20 Rotational Motion
 Phys101 Lectures 19, 20 Rotational Motion Key points: Angular and Linear Quantities Rotational Dynamics; Torque and Moment of Inertia Rotational Kinetic Energy Ref: 10-1,2,3,4,5,6,8,9. Page 1 Angular Quantities
Phys101 Lectures 19, 20 Rotational Motion Key points: Angular and Linear Quantities Rotational Dynamics; Torque and Moment of Inertia Rotational Kinetic Energy Ref: 10-1,2,3,4,5,6,8,9. Page 1 Angular Quantities
ONR MURI AIRFOILS: Animal Inspired Robust Flight with Outer and Inner Loop Strategies. Calin Belta
 ONR MURI AIRFOILS: Animal Inspired Robust Flight with Outer and Inner Loop Strategies Provable safety for animal inspired agile flight Calin Belta Hybrid and Networked Systems (HyNeSs) Lab Department of
ONR MURI AIRFOILS: Animal Inspired Robust Flight with Outer and Inner Loop Strategies Provable safety for animal inspired agile flight Calin Belta Hybrid and Networked Systems (HyNeSs) Lab Department of
Instrumentation Commande Architecture des Robots Evolués
 Instrumentation Commande Architecture des Robots Evolués Program 4a : Automatic Control, Robotics, Signal Processing Presentation General Orientation Research activities concern the modelling and control
Instrumentation Commande Architecture des Robots Evolués Program 4a : Automatic Control, Robotics, Signal Processing Presentation General Orientation Research activities concern the modelling and control
Lecture 9 Synthesis of Reactive Control Protocols
 Lecture 9 Synthesis of Reactive Control Protocols Nok Wongpiromsarn Singapore-MIT Alliance for Research and Technology Richard M. Murray and Ufuk Topcu California Institute of Technology EECI, 16 May 2012
Lecture 9 Synthesis of Reactive Control Protocols Nok Wongpiromsarn Singapore-MIT Alliance for Research and Technology Richard M. Murray and Ufuk Topcu California Institute of Technology EECI, 16 May 2012
Robot Control Basics CS 685
 Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Cybergenetics: Control theory for living cells
 Department of Biosystems Science and Engineering, ETH-Zürich Cybergenetics: Control theory for living cells Corentin Briat Joint work with Ankit Gupta and Mustafa Khammash Introduction Overview Cybergenetics:
Department of Biosystems Science and Engineering, ETH-Zürich Cybergenetics: Control theory for living cells Corentin Briat Joint work with Ankit Gupta and Mustafa Khammash Introduction Overview Cybergenetics:
V12 Gene Regulatory Networks, Boolean Networks
 V12 Gene Regulatory Networks, Boolean Networks Tue, May 28, 2018 1 Gene Expression Sequence of processes: from DNA to functional proteins transcription transcribed DNA mrna mrna RNA TFs regulation at every
V12 Gene Regulatory Networks, Boolean Networks Tue, May 28, 2018 1 Gene Expression Sequence of processes: from DNA to functional proteins transcription transcribed DNA mrna mrna RNA TFs regulation at every
Hybrid Control and Switched Systems. Lecture #1 Hybrid systems are everywhere: Examples
 Hybrid Control and Switched Systems Lecture #1 Hybrid systems are everywhere: Examples João P. Hespanha University of California at Santa Barbara Summary Examples of hybrid systems 1. Bouncing ball 2.
Hybrid Control and Switched Systems Lecture #1 Hybrid systems are everywhere: Examples João P. Hespanha University of California at Santa Barbara Summary Examples of hybrid systems 1. Bouncing ball 2.
A Simple Protein Synthesis Model
 A Simple Protein Synthesis Model James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University September 3, 213 Outline A Simple Protein Synthesis Model
A Simple Protein Synthesis Model James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University September 3, 213 Outline A Simple Protein Synthesis Model
86 Part 4 SUMMARY INTRODUCTION
 86 Part 4 Chapter # AN INTEGRATION OF THE DESCRIPTIONS OF GENE NETWORKS AND THEIR MODELS PRESENTED IN SIGMOID (CELLERATOR) AND GENENET Podkolodny N.L. *1, 2, Podkolodnaya N.N. 1, Miginsky D.S. 1, Poplavsky
86 Part 4 Chapter # AN INTEGRATION OF THE DESCRIPTIONS OF GENE NETWORKS AND THEIR MODELS PRESENTED IN SIGMOID (CELLERATOR) AND GENENET Podkolodny N.L. *1, 2, Podkolodnaya N.N. 1, Miginsky D.S. 1, Poplavsky
Dynamic logic for Hybrid systems
 Differential Dynamic Logic for Verifying Parametric Hybrid Systems by Andre Platzer presented by Hallstein Asheim Hansen 15th April 2008 Hallstein Asheim Hansen Slide 1 An example of a hybrid system: Thermostat
Differential Dynamic Logic for Verifying Parametric Hybrid Systems by Andre Platzer presented by Hallstein Asheim Hansen 15th April 2008 Hallstein Asheim Hansen Slide 1 An example of a hybrid system: Thermostat
56:198:582 Biological Networks Lecture 8
 56:198:582 Biological Networks Lecture 8 Course organization Two complementary approaches to modeling and understanding biological networks Constraint-based modeling (Palsson) System-wide Metabolism Steady-state
56:198:582 Biological Networks Lecture 8 Course organization Two complementary approaches to modeling and understanding biological networks Constraint-based modeling (Palsson) System-wide Metabolism Steady-state
Subject: Introduction to Process Control. Week 01, Lectures 01 02, Spring Content
 v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
AN ADAPTIVE NONLINEAR FUEL INJECTION CONTROL ALGORITHM FOR MOTORCYCLE ENGINE
 Journal of Marine Science and Technology, Vol. 3, No. 4, pp. 249-256 (25) 249 AN ADAPTIVE NONLINEAR FUEL INJECTION CONTROL ALGORITHM FOR MOTORCYCLE ENGINE Tung-Chieh Chen**, Chiu-Feng Lin*, Chyuan-Yow
Journal of Marine Science and Technology, Vol. 3, No. 4, pp. 249-256 (25) 249 AN ADAPTIVE NONLINEAR FUEL INJECTION CONTROL ALGORITHM FOR MOTORCYCLE ENGINE Tung-Chieh Chen**, Chiu-Feng Lin*, Chyuan-Yow
Hybrid Model of gene regulatory networks, the case of the lac-operon
 Hybrid Model of gene regulatory networks, the case of the lac-operon Laurent Tournier and Etienne Farcot LMC-IMAG, 51 rue des Mathématiques, 38041 Grenoble Cedex 9, France Laurent.Tournier@imag.fr, Etienne.Farcot@imag.fr
Hybrid Model of gene regulatory networks, the case of the lac-operon Laurent Tournier and Etienne Farcot LMC-IMAG, 51 rue des Mathématiques, 38041 Grenoble Cedex 9, France Laurent.Tournier@imag.fr, Etienne.Farcot@imag.fr
Methods and Tools. Average Operating Point Approach. To lump all engine operating points into one single average operating point.
 Methods and Tools Average Operating Point Approach To lump all engine operating points into one single average operating point. Used to estimate the fuel consumption Test cycle needs to be specified when
Methods and Tools Average Operating Point Approach To lump all engine operating points into one single average operating point. Used to estimate the fuel consumption Test cycle needs to be specified when
10-810: Advanced Algorithms and Models for Computational Biology. microrna and Whole Genome Comparison
 10-810: Advanced Algorithms and Models for Computational Biology microrna and Whole Genome Comparison Central Dogma: 90s Transcription factors DNA transcription mrna translation Proteins Central Dogma:
10-810: Advanced Algorithms and Models for Computational Biology microrna and Whole Genome Comparison Central Dogma: 90s Transcription factors DNA transcription mrna translation Proteins Central Dogma:
Bounded Model Checking with SAT/SMT. Edmund M. Clarke School of Computer Science Carnegie Mellon University 1/39
 Bounded Model Checking with SAT/SMT Edmund M. Clarke School of Computer Science Carnegie Mellon University 1/39 Recap: Symbolic Model Checking with BDDs Method used by most industrial strength model checkers:
Bounded Model Checking with SAT/SMT Edmund M. Clarke School of Computer Science Carnegie Mellon University 1/39 Recap: Symbolic Model Checking with BDDs Method used by most industrial strength model checkers:
CONTROL OF THE NONHOLONOMIC INTEGRATOR
 June 6, 25 CONTROL OF THE NONHOLONOMIC INTEGRATOR R. N. Banavar (Work done with V. Sankaranarayanan) Systems & Control Engg. Indian Institute of Technology, Bombay Mumbai -INDIA. banavar@iitb.ac.in Outline
June 6, 25 CONTROL OF THE NONHOLONOMIC INTEGRATOR R. N. Banavar (Work done with V. Sankaranarayanan) Systems & Control Engg. Indian Institute of Technology, Bombay Mumbai -INDIA. banavar@iitb.ac.in Outline
with Application to Autonomous Vehicles
 Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Nonlinear with Application to Autonomous Vehicles (Ph.D. Candidate) C. Silvestre (Supervisor) P. Oliveira (Co-supervisor) Institute for s and Robotics Instituto Superior Técnico Portugal January 2010 Presentation
Mark Redekopp, All rights reserved. Lecture 1 Slides. Intro Number Systems Logic Functions
 Lecture Slides Intro Number Systems Logic Functions EE 0 in Context EE 0 EE 20L Logic Design Fundamentals Logic Design, CAD Tools, Lab tools, Project EE 357 EE 457 Computer Architecture Using the logic
Lecture Slides Intro Number Systems Logic Functions EE 0 in Context EE 0 EE 20L Logic Design Fundamentals Logic Design, CAD Tools, Lab tools, Project EE 357 EE 457 Computer Architecture Using the logic
Lecture 7: Simple genetic circuits I
 Lecture 7: Simple genetic circuits I Paul C Bressloff (Fall 2018) 7.1 Transcription and translation In Fig. 20 we show the two main stages in the expression of a single gene according to the central dogma.
Lecture 7: Simple genetic circuits I Paul C Bressloff (Fall 2018) 7.1 Transcription and translation In Fig. 20 we show the two main stages in the expression of a single gene according to the central dogma.
Modeling a powertrain in Simscape in a modular vehicle component model library. Stuttgart, , MBtech, Jörn Bader
 Modeling a powertrain in Simscape in a modular vehicle component model library Stuttgart, 24.09.2015, MBtech, Jörn Bader Contents { Introduction initial situation { Driving performance and consumption
Modeling a powertrain in Simscape in a modular vehicle component model library Stuttgart, 24.09.2015, MBtech, Jörn Bader Contents { Introduction initial situation { Driving performance and consumption
Villa et al. (2005) Structural dynamics of the lac repressor-dna complex revealed by a multiscale simulation. PNAS 102:
 Structural dynamics of the lac repressor-dna complex revealed by a multiscale simulation. PNAS 102:") Villa et al. (2005) Structural dynamics of the lac repressor-dna complex revealed by a multiscale simulation. PNAS 102: 6783-6788. Background: The lac operon is a cluster of genes in the E. coli genome
Villa et al. (2005) Structural dynamics of the lac repressor-dna complex revealed by a multiscale simulation. PNAS 102: 6783-6788. Background: The lac operon is a cluster of genes in the E. coli genome
CHAPTER 1. Introduction
 CHAPTER 1 Introduction Linear geometric control theory was initiated in the beginning of the 1970 s, see for example, [1, 7]. A good summary of the subject is the book by Wonham [17]. The term geometric
CHAPTER 1 Introduction Linear geometric control theory was initiated in the beginning of the 1970 s, see for example, [1, 7]. A good summary of the subject is the book by Wonham [17]. The term geometric
CHAPTER 8: ROTATIONAL OF RIGID BODY PHYSICS. 1. Define Torque
 7 1. Define Torque 2. State the conditions for equilibrium of rigid body (Hint: 2 conditions) 3. Define angular displacement 4. Define average angular velocity 5. Define instantaneous angular velocity
7 1. Define Torque 2. State the conditions for equilibrium of rigid body (Hint: 2 conditions) 3. Define angular displacement 4. Define average angular velocity 5. Define instantaneous angular velocity
A Brief Introduction to Model Checking
 A Brief Introduction to Model Checking Jan. 18, LIX Page 1 Model Checking A technique for verifying finite state concurrent systems; a benefit on this restriction: largely automatic; a problem to fight:
A Brief Introduction to Model Checking Jan. 18, LIX Page 1 Model Checking A technique for verifying finite state concurrent systems; a benefit on this restriction: largely automatic; a problem to fight:
Complete all warm up questions Focus on operon functioning we will be creating operon models on Monday
 Complete all warm up questions Focus on operon functioning we will be creating operon models on Monday 1. What is the Central Dogma? 2. How does prokaryotic DNA compare to eukaryotic DNA? 3. How is DNA
Complete all warm up questions Focus on operon functioning we will be creating operon models on Monday 1. What is the Central Dogma? 2. How does prokaryotic DNA compare to eukaryotic DNA? 3. How is DNA
Self-tuning Control Based on Discrete Sliding Mode
 Int. J. Mech. Eng. Autom. Volume 1, Number 6, 2014, pp. 367-372 Received: July 18, 2014; Published: December 25, 2014 International Journal of Mechanical Engineering and Automation Akira Ohata 1, Akihiko
Int. J. Mech. Eng. Autom. Volume 1, Number 6, 2014, pp. 367-372 Received: July 18, 2014; Published: December 25, 2014 International Journal of Mechanical Engineering and Automation Akira Ohata 1, Akihiko
Lecture 10. Rigid Body Transformation & C-Space Obstacles. CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University
 CS 460/560 Introduction to Computational Robotics Fall 017, Rutgers University Lecture 10 Rigid Body Transformation & C-Space Obstacles Instructor: Jingjin Yu Outline Rigid body, links, and joints Task
CS 460/560 Introduction to Computational Robotics Fall 017, Rutgers University Lecture 10 Rigid Body Transformation & C-Space Obstacles Instructor: Jingjin Yu Outline Rigid body, links, and joints Task
Genetic transcription and regulation
 Genetic transcription and regulation Central dogma of biology DNA codes for DNA DNA codes for RNA RNA codes for proteins not surprisingly, many points for regulation of the process DNA codes for DNA replication
Genetic transcription and regulation Central dogma of biology DNA codes for DNA DNA codes for RNA RNA codes for proteins not surprisingly, many points for regulation of the process DNA codes for DNA replication
7.1 Describing Circular and Rotational Motion.notebook November 03, 2017
 Describing Circular and Rotational Motion Rotational motion is the motion of objects that spin about an axis. Section 7.1 Describing Circular and Rotational Motion We use the angle θ from the positive
Describing Circular and Rotational Motion Rotational motion is the motion of objects that spin about an axis. Section 7.1 Describing Circular and Rotational Motion We use the angle θ from the positive
Introduction to Bioinformatics
 Systems biology Introduction to Bioinformatics Systems biology: modeling biological p Study of whole biological systems p Wholeness : Organization of dynamic interactions Different behaviour of the individual
Systems biology Introduction to Bioinformatics Systems biology: modeling biological p Study of whole biological systems p Wholeness : Organization of dynamic interactions Different behaviour of the individual
Optimal control of engine controlled gearshift for a diesel-electric powertrain with backlash
 Optimal control of engine controlled gearshift for a diesel-electric powertrain with backlash V. Nezhadali L. Eriksson Vehicular Systems, Electrical Engineering Department, Linköping University, SE-58
Optimal control of engine controlled gearshift for a diesel-electric powertrain with backlash V. Nezhadali L. Eriksson Vehicular Systems, Electrical Engineering Department, Linköping University, SE-58
Lecture 20 Aspects of Control
 CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 20 Aspects of Control Instructor: Jingjin Yu Outline Feedback (closed-loop) control Mathematical models of dynamical
CS 460/560 Introduction to Computational Robotics Fall 2017, Rutgers University Lecture 20 Aspects of Control Instructor: Jingjin Yu Outline Feedback (closed-loop) control Mathematical models of dynamical
Introduction to Embedded Systems
 Introduction to Embedded Systems Sanjit A. Seshia UC Berkeley EECS 149/249A Fall 2015 2008-2015: E. A. Lee, A. L. Sangiovanni-Vincentelli, S. A. Seshia. All rights reserved. Chapter 13: Specification and
Introduction to Embedded Systems Sanjit A. Seshia UC Berkeley EECS 149/249A Fall 2015 2008-2015: E. A. Lee, A. L. Sangiovanni-Vincentelli, S. A. Seshia. All rights reserved. Chapter 13: Specification and
PHYSICS. Chapter 15 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT Pearson Education, Inc.
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 15 Lecture RANDALL D. KNIGHT Chapter 15 Oscillations IN THIS CHAPTER, you will learn about systems that oscillate in simple harmonic
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 15 Lecture RANDALL D. KNIGHT Chapter 15 Oscillations IN THIS CHAPTER, you will learn about systems that oscillate in simple harmonic
Lecture 8 Receding Horizon Temporal Logic Planning & Finite-State Abstraction
 Lecture 8 Receding Horizon Temporal Logic Planning & Finite-State Abstraction Ufuk Topcu Nok Wongpiromsarn Richard M. Murray AFRL, 26 April 2012 Contents of the lecture: Intro: Incorporating continuous
Lecture 8 Receding Horizon Temporal Logic Planning & Finite-State Abstraction Ufuk Topcu Nok Wongpiromsarn Richard M. Murray AFRL, 26 April 2012 Contents of the lecture: Intro: Incorporating continuous
Towards Fully-automated Driving
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, postdoc, project manager, software engineer,
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, postdoc, project manager, software engineer,
Gradient Sampling for Improved Action Selection and Path Synthesis
 Gradient Sampling for Improved Action Selection and Path Synthesis Ian M. Mitchell Department of Computer Science The University of British Columbia November 2016 mitchell@cs.ubc.ca http://www.cs.ubc.ca/~mitchell
Gradient Sampling for Improved Action Selection and Path Synthesis Ian M. Mitchell Department of Computer Science The University of British Columbia November 2016 mitchell@cs.ubc.ca http://www.cs.ubc.ca/~mitchell
ANALYSIS OF LOAD PATTERNS IN RUBBER COMPONENTS FOR VEHICLES
 ANALYSIS OF LOAD PATTERNS IN RUBBER COMPONENTS FOR VEHICLES Jerome Merel formerly at Hutchinson Corporate Research Center Israël Wander Apex Technologies Pierangelo Masarati, Marco Morandini Dipartimento
ANALYSIS OF LOAD PATTERNS IN RUBBER COMPONENTS FOR VEHICLES Jerome Merel formerly at Hutchinson Corporate Research Center Israël Wander Apex Technologies Pierangelo Masarati, Marco Morandini Dipartimento
MEAM 520. More Velocity Kinematics
 MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
SILVER OAK COLLEGE OF ENGINEERING & TECHNOLOGY
 BE - SEMESTER VI MID SEMESTER EXAMINATION SUMMER 2015 SUBJECT: DYNAMICS OF MACHINERY (161901) DATE: 09-03-2015 TIME: 02:00 pm to 03:13 pm TOTAL MARKS: 30 Q.1 (a) Define the following terms in short: (i)
BE - SEMESTER VI MID SEMESTER EXAMINATION SUMMER 2015 SUBJECT: DYNAMICS OF MACHINERY (161901) DATE: 09-03-2015 TIME: 02:00 pm to 03:13 pm TOTAL MARKS: 30 Q.1 (a) Define the following terms in short: (i)
Rui Dilão NonLinear Dynamics Group, IST
 1st Conference on Computational Interdisciplinary Sciences (CCIS 2010) 23-27 August 2010, INPE, São José dos Campos, Brasil Modeling, Simulating and Calibrating Genetic Regulatory Networks: An Application
1st Conference on Computational Interdisciplinary Sciences (CCIS 2010) 23-27 August 2010, INPE, São José dos Campos, Brasil Modeling, Simulating and Calibrating Genetic Regulatory Networks: An Application
Verification of model connection by FMI using acausal modeling tools ~ JSAE WG Activities ~
 Modelica Conference 2017, FMI User Meeting Verification of model connection by FMI using acausal modeling tools ~ JSAE WG Activities ~ Society of Automotive Engineers of Japan (JSAE) Committee of Automotive
Modelica Conference 2017, FMI User Meeting Verification of model connection by FMI using acausal modeling tools ~ JSAE WG Activities ~ Society of Automotive Engineers of Japan (JSAE) Committee of Automotive
Lecture 8: Temporal programs and the global structure of transcription networks. Chap 5 of Alon. 5.1 Introduction
 Lecture 8: Temporal programs and the global structure of transcription networks Chap 5 of Alon 5. Introduction We will see in this chapter that sensory transcription networks are largely made of just four
Lecture 8: Temporal programs and the global structure of transcription networks Chap 5 of Alon 5. Introduction We will see in this chapter that sensory transcription networks are largely made of just four
Polynomial-Time Verification of PCTL Properties of MDPs with Convex Uncertainties and its Application to Cyber-Physical Systems
 Polynomial-Time Verification of PCTL Properties of MDPs with Convex Uncertainties and its Application to Cyber-Physical Systems Alberto Puggelli DREAM Seminar - November 26, 2013 Collaborators and PIs:
Polynomial-Time Verification of PCTL Properties of MDPs with Convex Uncertainties and its Application to Cyber-Physical Systems Alberto Puggelli DREAM Seminar - November 26, 2013 Collaborators and PIs:
Control of Mobile Robots
 Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
DEPARTMENT OF MECHANICAL ENGINEERING Dynamics of Machinery. Submitted
 DEPARTMENT OF MECHANICAL ENGINEERING Dynamics of Machinery Submitted 1 UNIT I - Force Analysis INDEX (1) Introduction (2) Newton s Law (3) Types of force Analysis (4) Principle of Super Position (5) Free
DEPARTMENT OF MECHANICAL ENGINEERING Dynamics of Machinery Submitted 1 UNIT I - Force Analysis INDEX (1) Introduction (2) Newton s Law (3) Types of force Analysis (4) Principle of Super Position (5) Free
6) Motors and Encoders
 Motors and Encoders") 6) Motors and Encoders Electric motors are by far the most common component to supply mechanical input to a linear motion system. Stepper motors and servo motors are the popular choices in linear motion
6) Motors and Encoders Electric motors are by far the most common component to supply mechanical input to a linear motion system. Stepper motors and servo motors are the popular choices in linear motion
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM. M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010
 FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
DYNAMICS ME HOMEWORK PROBLEM SETS
 DYNAMICS ME 34010 HOMEWORK PROBLEM SETS Mahmoud M. Safadi 1, M.B. Rubin 2 1 safadi@technion.ac.il, 2 mbrubin@technion.ac.il Faculty of Mechanical Engineering Technion Israel Institute of Technology Spring
DYNAMICS ME 34010 HOMEWORK PROBLEM SETS Mahmoud M. Safadi 1, M.B. Rubin 2 1 safadi@technion.ac.il, 2 mbrubin@technion.ac.il Faculty of Mechanical Engineering Technion Israel Institute of Technology Spring
Autonomous navigation of unicycle robots using MPC
 Autonomous navigation of unicycle robots using MPC M. Farina marcello.farina@polimi.it Dipartimento di Elettronica e Informazione Politecnico di Milano 7 June 26 Outline Model and feedback linearization
Autonomous navigation of unicycle robots using MPC M. Farina marcello.farina@polimi.it Dipartimento di Elettronica e Informazione Politecnico di Milano 7 June 26 Outline Model and feedback linearization
CS-E5880 Modeling biological networks Gene regulatory networks
 CS-E5880 Modeling biological networks Gene regulatory networks Jukka Intosalmi (based on slides by Harri Lähdesmäki) Department of Computer Science Aalto University January 12, 2018 Outline Modeling gene
CS-E5880 Modeling biological networks Gene regulatory networks Jukka Intosalmi (based on slides by Harri Lähdesmäki) Department of Computer Science Aalto University January 12, 2018 Outline Modeling gene
56:198:582 Biological Networks Lecture 10
 56:198:582 Biological Networks Lecture 10 Temporal Programs and the Global Structure The single-input module (SIM) network motif The network motifs we have studied so far all had a defined number of nodes.
56:198:582 Biological Networks Lecture 10 Temporal Programs and the Global Structure The single-input module (SIM) network motif The network motifs we have studied so far all had a defined number of nodes.
SPA for quantitative analysis: Lecture 6 Modelling Biological Processes
 1/ 223 SPA for quantitative analysis: Lecture 6 Modelling Biological Processes Jane Hillston LFCS, School of Informatics The University of Edinburgh Scotland 7th March 2013 Outline 2/ 223 1 Introduction
1/ 223 SPA for quantitative analysis: Lecture 6 Modelling Biological Processes Jane Hillston LFCS, School of Informatics The University of Edinburgh Scotland 7th March 2013 Outline 2/ 223 1 Introduction
BME 5742 Biosystems Modeling and Control
 BME 5742 Biosystems Modeling and Control Lecture 24 Unregulated Gene Expression Model Dr. Zvi Roth (FAU) 1 The genetic material inside a cell, encoded in its DNA, governs the response of a cell to various
BME 5742 Biosystems Modeling and Control Lecture 24 Unregulated Gene Expression Model Dr. Zvi Roth (FAU) 1 The genetic material inside a cell, encoded in its DNA, governs the response of a cell to various
Reductionist Paradox Are the laws of chemistry and physics sufficient for the discovery of new drugs?
 Quantitative Biology Colloquium, University of Arizona, March 1, 2011 Reductionist Paradox Are the laws of chemistry and physics sufficient for the discovery of new drugs? Gerry Maggiora, Ph.D. Adjunct
Quantitative Biology Colloquium, University of Arizona, March 1, 2011 Reductionist Paradox Are the laws of chemistry and physics sufficient for the discovery of new drugs? Gerry Maggiora, Ph.D. Adjunct
A Study on the Tube of Integral Propeller Shaft for the Rear-wheel Drive Automobile Using Carbon Composite Fiber
 A Study on the Tube of Integral Propeller Shaft for the Rear-wheel Drive Automobile Using Carbon Composite Fiber Kibong Han Mechatronics Department, Jungwon University, 85 Munmu-ro, Goesan-gun, South Korea.
A Study on the Tube of Integral Propeller Shaft for the Rear-wheel Drive Automobile Using Carbon Composite Fiber Kibong Han Mechatronics Department, Jungwon University, 85 Munmu-ro, Goesan-gun, South Korea.
ANALYZING REAL TIME LINEAR CONTROL SYSTEMS USING SOFTWARE VERIFICATION. Parasara Sridhar Duggirala UConn Mahesh Viswanathan UIUC
 ANALYZING REAL TIME LINEAR CONTROL SYSTEMS USING SOFTWARE VERIFICATION Parasara Sridhar Duggirala UConn Mahesh Viswanathan UIUC Real-Time Systems Linear Control Systems Verification Verification Control
ANALYZING REAL TIME LINEAR CONTROL SYSTEMS USING SOFTWARE VERIFICATION Parasara Sridhar Duggirala UConn Mahesh Viswanathan UIUC Real-Time Systems Linear Control Systems Verification Verification Control
Feedback Control CONTROL THEORY FUNDAMENTALS. Feedback Control: A History. Feedback Control: A History (contd.) Anuradha Annaswamy
 Anuradha Annaswamy") Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
The Montana Toolset: Formal Analysis of AADL Specifications
 Fremont Associates Process Project QA The Montana Toolset: Formal Analysis of AADL Specifications SAE AS-2 2 Working Group Seal Beach, California 27 January 2005 Outline Origins, Origins, Goals, Plans
Fremont Associates Process Project QA The Montana Toolset: Formal Analysis of AADL Specifications SAE AS-2 2 Working Group Seal Beach, California 27 January 2005 Outline Origins, Origins, Goals, Plans
Reachability Analysis for Hybrid Dynamic Systems*
 Reachability nalysis for Hybrid Dynamic Systems* Olaf Stursberg Faculty of Electrical Engineering and Information Technology Technische Universität München * Thanks to: Matthias lthoff, Edmund M. Clarke,
Reachability nalysis for Hybrid Dynamic Systems* Olaf Stursberg Faculty of Electrical Engineering and Information Technology Technische Universität München * Thanks to: Matthias lthoff, Edmund M. Clarke,
Engineering Self-Organization and Emergence: issues and directions
 5/0/ Engineering Self-Organization and Emergence: issues and directions Franco Zambonelli franco.zambonelli@unimore.it Agents and Pervasive Computing Group Università di Modena e Reggio Emilia SOAS 005
5/0/ Engineering Self-Organization and Emergence: issues and directions Franco Zambonelli franco.zambonelli@unimore.it Agents and Pervasive Computing Group Università di Modena e Reggio Emilia SOAS 005
Lecture 9 Nonlinear Control Design. Course Outline. Exact linearization: example [one-link robot] Exact Feedback Linearization
![Lecture 9 Nonlinear Control Design. Course Outline. Exact linearization: example [one-link robot] Exact Feedback Linearization](/thumbs/83/87856505.jpg "Lecture 9 Nonlinear Control Design. Course Outline. Exact linearization: example [one-link robot] Exact Feedback Linearization") Lecture 9 Nonlinear Control Design Course Outline Eact-linearization Lyapunov-based design Lab Adaptive control Sliding modes control Literature: [Khalil, ch.s 13, 14.1,14.] and [Glad-Ljung,ch.17] Lecture
Lecture 9 Nonlinear Control Design Course Outline Eact-linearization Lyapunov-based design Lab Adaptive control Sliding modes control Literature: [Khalil, ch.s 13, 14.1,14.] and [Glad-Ljung,ch.17] Lecture
Week 3: Wheeled Kinematics AMR - Autonomous Mobile Robots
 Week 3: Wheeled Kinematics AMR - Paul Furgale Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart Wheeled Kinematics 1 AMRx Flipped Classroom A Matlab exercise is coming later
Week 3: Wheeled Kinematics AMR - Paul Furgale Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart Wheeled Kinematics 1 AMRx Flipped Classroom A Matlab exercise is coming later
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter
 Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
Multi-layer Flight Control Synthesis and Analysis of a Small-scale UAV Helicopter Ali Karimoddini, Guowei Cai, Ben M. Chen, Hai Lin and Tong H. Lee Graduate School for Integrative Sciences and Engineering,
Coordinated Path Following for Mobile Robots
 Coordinated Path Following for Mobile Robots Kiattisin Kanjanawanishkul, Marius Hofmeister, and Andreas Zell University of Tübingen, Department of Computer Science, Sand 1, 7276 Tübingen Abstract. A control
Coordinated Path Following for Mobile Robots Kiattisin Kanjanawanishkul, Marius Hofmeister, and Andreas Zell University of Tübingen, Department of Computer Science, Sand 1, 7276 Tübingen Abstract. A control
Chapter 7 Control. Part Classical Control. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various