FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM. M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010
|
|
|
- Rodney Page
- 5 years ago
- Views:
Transcription
1 FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010
2 Attitude control : the exercise of control over the orientation of an object with respect to an inertial frame of reference or another entity (the celestial sphere, certain fields, nearby objects, etc.).
3 Controlling vehicle attitude requires : sensors to measure vehicle attitude actuators to apply the torques needed to re-orient the vehicle to a desired attitude algorithms to command the actuators based on (1) sensor measurements of the current attitude and (2) specification of a desired attitude.
4 Momentum wheels These are electric motor driven rotors made to spin in the direction opposite to that required to re-orient the vehicle. Since momentum wheels make up a small fraction of the spacecraft's mass and are computer controlled, they give precise control.
5 Momentum wheels are generally suspended on magnetic bearings to avoid bearing friction and breakdown problems. To maintain orientation in three dimensional space a minimum of two must be used, with additional units providing single failure protection.
6 Spacecraft systems need increased on board autonomy to detect the occurred faults, isolate the faulty components, and effectively handle their operation in the presence of such faults. In this research a scheme of fault detection and diagnosis is developed for spacecraft Attitude Control System.
7 Fault detection and isolation a subfield of control engineering which concerns itself with monitoring a system, identifying when a fault has occurred, and pinpointing the type of fault and its location.
8 Fault detection: the identification of the presence of an unknown fault.
9 FDD Methods Analythical Redundancy Hrdware Redundancy Model Base Signal Base Heuristic Model Analytical Model Spectrum Analysis Wavelet Techniques Expert Knowledge Base/Neural Network System State EStimation Parameter estimation
10 Model-based FDI In model-based FDI techniques some model of the system is used to decide about the occurrence of fault. The system model may be mathematical, or knowledge based. Some of the model-based FDI techniques include observer-based approach, parityspace approach, and parameter identification based methods.
11 State estimation approach In the Kalman Filter method, the innovation of K.F is used as the fault detection residual. This residual is white and has a zero mean under nonfaulty conditions, and becomes non-zero in the presence of a fault. The key idea in the parity relation approach is to check the consistency of the mathematical equations of the system (analytical redundancy relations) by using the actual measurements. In this method, residuals are colored and disturbance decoupling improves.
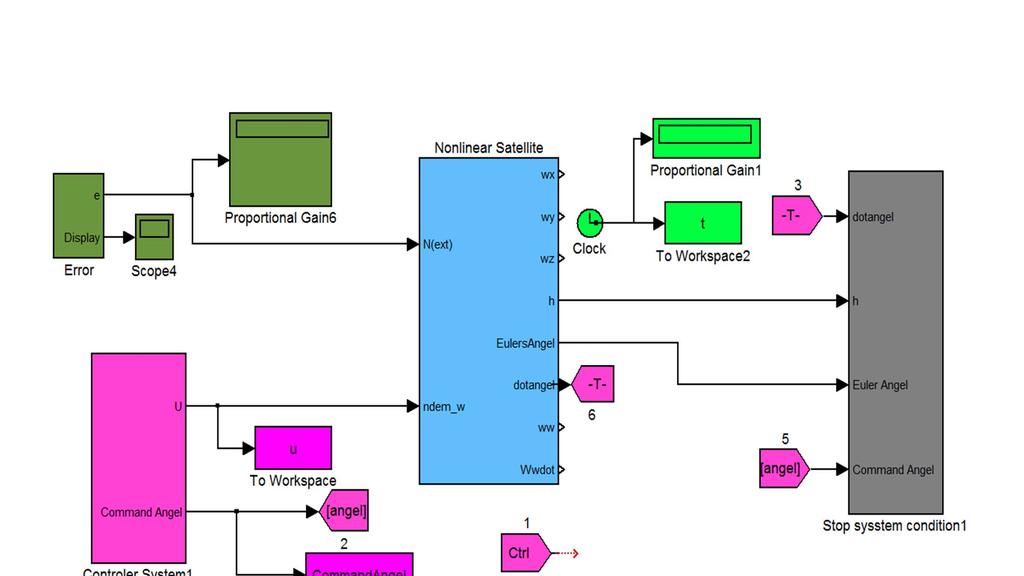
12 Description and Modeling of Spacecraft Attitude Control System Equations of motion:
13 In the other hand so :
14 Reference frame
15 ω RIB C θ C ψ C θ S ψ S θ S ψ C φ S φ S θ C ψ C ψ C φ S φ S θ S ψ S φ C θ S φ S ψ C φ S θ C ψ S φ C ψ C φ S θ S ψ C φ C θ 0 ω 0 0 ω BR M I S h w ω BI h B h w I S I S ω RIB p q r Q ϕ θ ψ
16 M G Reaction wheels we have: w w dem Max angular moment 0.2Nm/s Max angular velacity 280 rad/sec Inertia moment Nominal Velocity Nominal torque kgm2 100 rad/sec 1 N.m
17 Linearization
18
19 Computing the state transition matrix
20 The linear state space representation of the process model: The covariance matrix M before the:
21 Computing the Kalman gain matrix K Kalman Filter as a Residual Generator

22

23
24
25
")

26 Euler angles (fault-free) Angular velocity (fault-free)
27 Euler angle (fault injected for in t=13s) Residuals (fault injected in t=13s)
28 Thank you Happy New Year!
29
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
Application of Adaptive Thresholds in Robust Fault Detection of an Electro- Mechanical Single-Wheel Steering Actuator
 Preprints of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes (SAFEPROCESS) August 29-31, 212. Mexico City, Mexico Application of Adaptive Thresholds in Robust Fault
Preprints of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes (SAFEPROCESS) August 29-31, 212. Mexico City, Mexico Application of Adaptive Thresholds in Robust Fault
Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers
 Osaka University March 15, 2018 Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers Elisabetta Punta CNR-IEIIT, Italy Problem Statement First Case Spacecraft Model Position Dynamics Attitude
Osaka University March 15, 2018 Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers Elisabetta Punta CNR-IEIIT, Italy Problem Statement First Case Spacecraft Model Position Dynamics Attitude
Spacecraft Attitude Control using CMGs: Singularities and Global Controllability
 1 / 28 Spacecraft Attitude Control using CMGs: Singularities and Global Controllability Sanjay Bhat TCS Innovation Labs Hyderabad International Workshop on Perspectives in Dynamical Systems and Control
1 / 28 Spacecraft Attitude Control using CMGs: Singularities and Global Controllability Sanjay Bhat TCS Innovation Labs Hyderabad International Workshop on Perspectives in Dynamical Systems and Control
MAE 142 Homework #5 Due Friday, March 13, 2009
 MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
A Multiple-Observer Scheme for Fault Detection, Isolation and Recovery of Satellite Thrusters
 Proceedings of the EuroGNC 3, nd CEAS Specialist Conference on Guidance, Navigation & Control, Delft University of Technology, Delft, The Netherlands, April -, 3 FrBT.3 A Multiple-Observer Scheme for Fault
Proceedings of the EuroGNC 3, nd CEAS Specialist Conference on Guidance, Navigation & Control, Delft University of Technology, Delft, The Netherlands, April -, 3 FrBT.3 A Multiple-Observer Scheme for Fault
An Attitude Control System and Commissioning Results of the SNAP-1 Nanosatellite
 An Attitude Control System and Commissioning Results of the SNAP-1 Nanosatellite WH Steyn, Y Hashida and V Lappas Surrey Space Centre University of Surrey Guildford, Surrey GU2 5XH United Kingdom Abstract.
An Attitude Control System and Commissioning Results of the SNAP-1 Nanosatellite WH Steyn, Y Hashida and V Lappas Surrey Space Centre University of Surrey Guildford, Surrey GU2 5XH United Kingdom Abstract.
THE REACTION WHEEL PENDULUM
 THE REACTION WHEEL PENDULUM By Ana Navarro Yu-Han Sun Final Report for ECE 486, Control Systems, Fall 2013 TA: Dan Soberal 16 December 2013 Thursday 3-6pm Contents 1. Introduction... 1 1.1 Sensors (Encoders)...
THE REACTION WHEEL PENDULUM By Ana Navarro Yu-Han Sun Final Report for ECE 486, Control Systems, Fall 2013 TA: Dan Soberal 16 December 2013 Thursday 3-6pm Contents 1. Introduction... 1 1.1 Sensors (Encoders)...
Adaptive Unscented Kalman Filter with Multiple Fading Factors for Pico Satellite Attitude Estimation
 Adaptive Unscented Kalman Filter with Multiple Fading Factors for Pico Satellite Attitude Estimation Halil Ersin Söken and Chingiz Hajiyev Aeronautics and Astronautics Faculty Istanbul Technical University
Adaptive Unscented Kalman Filter with Multiple Fading Factors for Pico Satellite Attitude Estimation Halil Ersin Söken and Chingiz Hajiyev Aeronautics and Astronautics Faculty Istanbul Technical University
Active Diagnosis of Hybrid Systems Guided by Diagnosability Properties
 Active Diagnosis of Hybrid Systems Guided by Diagnosability Properties Application to autonomous satellites Louise Travé-Massuyès 5 February 29 Motivation Control and autonomy of complex dynamic systems
Active Diagnosis of Hybrid Systems Guided by Diagnosability Properties Application to autonomous satellites Louise Travé-Massuyès 5 February 29 Motivation Control and autonomy of complex dynamic systems
Supervisor: Dr. Youmin Zhang Amin Salar Zahra Gallehdari Narges Roofigari
 Supervisor: Dr. Youmin Zhang Amin Salar 6032761 Zahra Gallehdari 1309102 Narges Roofigari 8907926 Fault Diagnosis and Fault Tolerant Control Systems Final Project December 2011 Contents Introduction Quad-Rotor
Supervisor: Dr. Youmin Zhang Amin Salar 6032761 Zahra Gallehdari 1309102 Narges Roofigari 8907926 Fault Diagnosis and Fault Tolerant Control Systems Final Project December 2011 Contents Introduction Quad-Rotor
Lecture Module 5: Introduction to Attitude Stabilization and Control
 1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
Attitude Determination and. Attitude Control
 Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
 Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Analytical Disturbance Modeling of a Flywheel Due to Statically and Dynamically Unbalances
 Journal of mathematics and computer Science 9 (2014) 139-148 Analytical Disturbance Modeling of a Flywheel Due to Statically and Dynamically Unbalances Amir Karimian 1, Saied Shokrollahi 2, Shahram Yousefi
Journal of mathematics and computer Science 9 (2014) 139-148 Analytical Disturbance Modeling of a Flywheel Due to Statically and Dynamically Unbalances Amir Karimian 1, Saied Shokrollahi 2, Shahram Yousefi
A Neural Network Approach to Fault Detection in Spacecraft Attitude Determination and Control Systems
 Utah State University DigitalCommons@USU All Graduate Theses and Dissertations Graduate Studies 5-2015 A Neural Network Approach to Fault Detection in Spacecraft Attitude Determination and Control Systems
Utah State University DigitalCommons@USU All Graduate Theses and Dissertations Graduate Studies 5-2015 A Neural Network Approach to Fault Detection in Spacecraft Attitude Determination and Control Systems
Quaternion-Based Tracking Control Law Design For Tracking Mode
 A. M. Elbeltagy Egyptian Armed forces Conference on small satellites. 2016 Logan, Utah, USA Paper objectives Introduction Presentation Agenda Spacecraft combined nonlinear model Proposed RW nonlinear attitude
A. M. Elbeltagy Egyptian Armed forces Conference on small satellites. 2016 Logan, Utah, USA Paper objectives Introduction Presentation Agenda Spacecraft combined nonlinear model Proposed RW nonlinear attitude
Mechatronics Assignment # 1
 Problem # 1 Consider a closed-loop, rotary, speed-control system with a proportional controller K p, as shown below. The inertia of the rotor is J. The damping coefficient B in mechanical systems is usually
Problem # 1 Consider a closed-loop, rotary, speed-control system with a proportional controller K p, as shown below. The inertia of the rotor is J. The damping coefficient B in mechanical systems is usually
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon
 Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Wind Turbine Fault Detection Using Counter-Based Residual Thresholding
 Wind Turbine Fault Detection Using Counter-Based Residual Thresholding Ahmet Arda Ozdemir, Peter Seiler, and Gary J. Balas Department of Aerospace Engineering and Mechanics, University of Minnesota, Minneapolis,
Wind Turbine Fault Detection Using Counter-Based Residual Thresholding Ahmet Arda Ozdemir, Peter Seiler, and Gary J. Balas Department of Aerospace Engineering and Mechanics, University of Minnesota, Minneapolis,
AIRCRAFT BRAKING DYNAMICS AND BRAKE SYSTEM MODELING FOR FAULT DETECTION AND ISOLATION
 AIRCRAFT BRAKING DYNAMICS AND BRAKE SYSTEM MODELING FOR FAULT DETECTION AND ISOLATION Lucas Cardoso Navarro ITA São José dos Campos, São Paulo, Brazil Luiz Carlos Sandoval Goes ITA São José dos Campos,
AIRCRAFT BRAKING DYNAMICS AND BRAKE SYSTEM MODELING FOR FAULT DETECTION AND ISOLATION Lucas Cardoso Navarro ITA São José dos Campos, São Paulo, Brazil Luiz Carlos Sandoval Goes ITA São José dos Campos,
EXAMPLE: MODELING THE PT326 PROCESS TRAINER
 CHAPTER 1 By Radu Muresan University of Guelph Page 1 EXAMPLE: MODELING THE PT326 PROCESS TRAINER The PT326 apparatus models common industrial situations in which temperature control is required in the
CHAPTER 1 By Radu Muresan University of Guelph Page 1 EXAMPLE: MODELING THE PT326 PROCESS TRAINER The PT326 apparatus models common industrial situations in which temperature control is required in the
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
Handling parametric and non-parametric additive faults in LTV Systems
 1 / 16 Handling parametric and non-parametric additive faults in LTV Systems Qinghua Zhang & Michèle Basseville INRIA & CNRS-IRISA, Rennes, France 9th IFAC SAFEPROCESS, Paris, France, Sept. 2-4, 2015 2
1 / 16 Handling parametric and non-parametric additive faults in LTV Systems Qinghua Zhang & Michèle Basseville INRIA & CNRS-IRISA, Rennes, France 9th IFAC SAFEPROCESS, Paris, France, Sept. 2-4, 2015 2
3 Rigid Spacecraft Attitude Control
 1 3 Rigid Spacecraft Attitude Control Consider a rigid spacecraft with body-fixed frame F b with origin O at the mass centre. Let ω denote the angular velocity of F b with respect to an inertial frame
1 3 Rigid Spacecraft Attitude Control Consider a rigid spacecraft with body-fixed frame F b with origin O at the mass centre. Let ω denote the angular velocity of F b with respect to an inertial frame
A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators
 des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
TTK4190 Guidance and Control Exam Suggested Solution Spring 2011
 TTK4190 Guidance and Control Exam Suggested Solution Spring 011 Problem 1 A) The weight and buoyancy of the vehicle can be found as follows: W = mg = 15 9.81 = 16.3 N (1) B = 106 4 ( ) 0.6 3 3 π 9.81 =
TTK4190 Guidance and Control Exam Suggested Solution Spring 011 Problem 1 A) The weight and buoyancy of the vehicle can be found as follows: W = mg = 15 9.81 = 16.3 N (1) B = 106 4 ( ) 0.6 3 3 π 9.81 =
A New Model Reference Adaptive Formulation to Estimate Stator Resistance in Field Oriented Induction Motor Drive
 A New Model Reference Adaptive Formulation to Estimate Stator Resistance in Field Oriented Induction Motor Drive Saptarshi Basak 1, Chandan Chakraborty 1, Senior Member IEEE and Yoichi Hori 2, Fellow IEEE
A New Model Reference Adaptive Formulation to Estimate Stator Resistance in Field Oriented Induction Motor Drive Saptarshi Basak 1, Chandan Chakraborty 1, Senior Member IEEE and Yoichi Hori 2, Fellow IEEE
Simplified Filtering Estimator for Spacecraft Attitude Determination from Phase Information of GPS Signals
 WCE 7, July - 4, 7, London, U.K. Simplified Filtering Estimator for Spacecraft Attitude Determination from Phase Information of GPS Signals S. Purivigraipong, Y. Hashida, and M. Unwin Abstract his paper
WCE 7, July - 4, 7, London, U.K. Simplified Filtering Estimator for Spacecraft Attitude Determination from Phase Information of GPS Signals S. Purivigraipong, Y. Hashida, and M. Unwin Abstract his paper
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
Lab #4 - Gyroscopic Motion of a Rigid Body
 Lab #4 - Gyroscopic Motion of a Rigid Body Last Updated: April 6, 2007 INTRODUCTION Gyroscope is a word used to describe a rigid body, usually with symmetry about an axis, that has a comparatively large
Lab #4 - Gyroscopic Motion of a Rigid Body Last Updated: April 6, 2007 INTRODUCTION Gyroscope is a word used to describe a rigid body, usually with symmetry about an axis, that has a comparatively large
Fault-Tolerant Control Strategies for a Class of Euler-Lagrange Nonlinear Systems Subject to Simultaneous Sensor and Actuator Faults
 Fault-Tolerant Control Strategies for a Class of Euler-Lagrange Nonlinear Systems Subject to Simultaneous Sensor and Actuator Faults Maryam Abdollahi A Thesis in The Department of Electrical and Computer
Fault-Tolerant Control Strategies for a Class of Euler-Lagrange Nonlinear Systems Subject to Simultaneous Sensor and Actuator Faults Maryam Abdollahi A Thesis in The Department of Electrical and Computer
Exercise 5 - Hydraulic Turbines and Electromagnetic Systems
 Exercise 5 - Hydraulic Turbines and Electromagnetic Systems 5.1 Hydraulic Turbines Whole courses are dedicated to the analysis of gas turbines. For the aim of modeling hydraulic systems, we analyze here
Exercise 5 - Hydraulic Turbines and Electromagnetic Systems 5.1 Hydraulic Turbines Whole courses are dedicated to the analysis of gas turbines. For the aim of modeling hydraulic systems, we analyze here
Sensorless Control for High-Speed BLDC Motors With Low Inductance and Nonideal Back EMF
 Sensorless Control for High-Speed BLDC Motors With Low Inductance and Nonideal Back EMF P.Suganya Assistant Professor, Department of EEE, Bharathiyar Institute of Engineering for Women Salem (DT). Abstract
Sensorless Control for High-Speed BLDC Motors With Low Inductance and Nonideal Back EMF P.Suganya Assistant Professor, Department of EEE, Bharathiyar Institute of Engineering for Women Salem (DT). Abstract
Jitter and Basic Requirements of the Reaction Wheel Assembly in the Attitude Control System
 Jitter and Basic Requirements of the Reaction Wheel Assembly in the Attitude Control System Lulu Liu August, 7 1 Brief Introduction Photometric precision is a major concern in this space mission. A pointing
Jitter and Basic Requirements of the Reaction Wheel Assembly in the Attitude Control System Lulu Liu August, 7 1 Brief Introduction Photometric precision is a major concern in this space mission. A pointing
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th
 Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
DC Motor Position: System Modeling
 1 of 7 01/03/2014 22:07 Tips Effects TIPS ABOUT BASICS INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SUSPENSION INVERTED PENDULUM SYSTEM MODELING ANALYSIS DC Motor Position: System
1 of 7 01/03/2014 22:07 Tips Effects TIPS ABOUT BASICS INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SUSPENSION INVERTED PENDULUM SYSTEM MODELING ANALYSIS DC Motor Position: System
Predictive Control of Gyroscopic-Force Actuators for Mechanical Vibration Damping
 ARC Centre of Excellence for Complex Dynamic Systems and Control, pp 1 15 Predictive Control of Gyroscopic-Force Actuators for Mechanical Vibration Damping Tristan Perez 1, 2 Joris B Termaat 3 1 School
ARC Centre of Excellence for Complex Dynamic Systems and Control, pp 1 15 Predictive Control of Gyroscopic-Force Actuators for Mechanical Vibration Damping Tristan Perez 1, 2 Joris B Termaat 3 1 School
Neural Networks Lecture 10: Fault Detection and Isolation (FDI) Using Neural Networks
 Using Neural Networks") Neural Networks Lecture 10: Fault Detection and Isolation (FDI) Using Neural Networks H.A. Talebi Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2011.
Neural Networks Lecture 10: Fault Detection and Isolation (FDI) Using Neural Networks H.A. Talebi Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2011.
Teacher s notes 35 Conservation of angular momentum (1)
") Sensors: Loggers: Rotary Motion Any EASYSENSE Physics Logging time: 10 seconds Teacher s notes 35 Conservation of angular momentum (1) Introduction The use of the disc accessories allows the Rotary Motion
Sensors: Loggers: Rotary Motion Any EASYSENSE Physics Logging time: 10 seconds Teacher s notes 35 Conservation of angular momentum (1) Introduction The use of the disc accessories allows the Rotary Motion
Passive Magnetic Attitude Control for CubeSat Spacecraft
 Passive Magnetic Attitude Control for CubeSat Spacecraft David Gerhardt Advisor: Dr. Scott Palo University of Colorado at Boulder Department of Aerospace Engineering Sciences August 11, 2010 Motivation
Passive Magnetic Attitude Control for CubeSat Spacecraft David Gerhardt Advisor: Dr. Scott Palo University of Colorado at Boulder Department of Aerospace Engineering Sciences August 11, 2010 Motivation
Generation X. Attitude Control Systems (ACS) Aprille Ericsson Dave Olney Josephine San. July 27, 2000
 Aprille Ericsson Dave Olney Josephine San. July 27, 2000") Generation X Attitude Control Systems (ACS) Aprille Ericsson Dave Olney Josephine San July 27, 2000 ACS Overview Requirements Assumptions Disturbance Torque Assessment Component and Control Mode Recommendations
Generation X Attitude Control Systems (ACS) Aprille Ericsson Dave Olney Josephine San July 27, 2000 ACS Overview Requirements Assumptions Disturbance Torque Assessment Component and Control Mode Recommendations
A Ferris wheel in Japan has a radius of 50m and a mass of 1.2 x 10 6 kg. If a torque of 1 x 10 9 Nm is needed to turn the wheel when it starts at
 Option B Quiz 1. A Ferris wheel in Japan has a radius of 50m and a mass of 1. x 10 6 kg. If a torque of 1 x 10 9 Nm is needed to turn the wheel when it starts at rest, what is the wheel s angular acceleration?
Option B Quiz 1. A Ferris wheel in Japan has a radius of 50m and a mass of 1. x 10 6 kg. If a torque of 1 x 10 9 Nm is needed to turn the wheel when it starts at rest, what is the wheel s angular acceleration?
1. The first thing you need to find is the mass of piece three. In order to find it you need to realize that the masses of the three pieces must be
 1. The first thing you need to find is the mass of piece three. In order to find it you need to realize that the masses of the three pieces must be equal to the initial mass of the starting rocket. Now
1. The first thing you need to find is the mass of piece three. In order to find it you need to realize that the masses of the three pieces must be equal to the initial mass of the starting rocket. Now
Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels
 Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels Fuyuto Terui a, Nobutada Sako b, Keisuke Yoshihara c, Toru Yamamoto c, Shinichi Nakasuka b a National Aerospace Laboratory
Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels Fuyuto Terui a, Nobutada Sako b, Keisuke Yoshihara c, Toru Yamamoto c, Shinichi Nakasuka b a National Aerospace Laboratory
Design and performance simulation of a satellite momentum exchange actuator
 Australian Journal of Mechanical Engineering ISSN: 1448-4846 (Print) 2204-2253 (Online) Journal homepage: http://www.tandfonline.com/loi/tmec20 Design and performance simulation of a satellite momentum
Australian Journal of Mechanical Engineering ISSN: 1448-4846 (Print) 2204-2253 (Online) Journal homepage: http://www.tandfonline.com/loi/tmec20 Design and performance simulation of a satellite momentum
Rigid bodies - general theory
 Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Rigid bodies - general theory Kinetic Energy: based on FW-26 Consider a system on N particles with all their relative separations fixed: it has 3 translational and 3 rotational degrees of freedom. Motion
Chapter 11 Angular Momentum; General Rotation. Copyright 2009 Pearson Education, Inc.
 Chapter 11 Angular Momentum; General Rotation ! L = I!! Units of Chapter 11 Angular Momentum Objects Rotating About a Fixed Axis Vector Cross Product; Torque as a Vector Angular Momentum of a Particle
Chapter 11 Angular Momentum; General Rotation ! L = I!! Units of Chapter 11 Angular Momentum Objects Rotating About a Fixed Axis Vector Cross Product; Torque as a Vector Angular Momentum of a Particle
Spinning Satellites Examples. ACS: Gravity Gradient. ACS: Single Spin
 Attitude Determination and Attitude Control Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky
Attitude Determination and Attitude Control Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky
General Definition of Torque, final. Lever Arm. General Definition of Torque 7/29/2010. Units of Chapter 10
 Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
Satellite Attitude Determination with Attitude Sensors and Gyros using Steady-state Kalman Filter
 Satellite Attitude Determination with Attitude Sensors and Gyros using Steady-state Kalman Filter Vaibhav V. Unhelkar, Hari B. Hablani Student, email: v.unhelkar@iitb.ac.in. Professor, email: hbhablani@aero.iitb.ac.in
Satellite Attitude Determination with Attitude Sensors and Gyros using Steady-state Kalman Filter Vaibhav V. Unhelkar, Hari B. Hablani Student, email: v.unhelkar@iitb.ac.in. Professor, email: hbhablani@aero.iitb.ac.in
Design of Attitude Determination and Control Subsystem
 Design of Attitude Determination and Control Subsystem 1) Control Modes and Requirements Control Modes: Control Modes Explanation 1 ) Spin-Up Mode - Acquisition of Stability through spin-up maneuver -
Design of Attitude Determination and Control Subsystem 1) Control Modes and Requirements Control Modes: Control Modes Explanation 1 ) Spin-Up Mode - Acquisition of Stability through spin-up maneuver -
Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos
 Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos Lecture 6: Modeling of Electromechanical Systems Principles of Motor Operation
Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos Lecture 6: Modeling of Electromechanical Systems Principles of Motor Operation
Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia. 8.01t Nov 3, 2004
 Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia 8.01t Nov 3, 2004 Rotation and Translation of Rigid Body Motion of a thrown object Translational Motion of the Center of Mass Total
Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia 8.01t Nov 3, 2004 Rotation and Translation of Rigid Body Motion of a thrown object Translational Motion of the Center of Mass Total
COMPARISON OF FDI METHODS APPLIED ON NANOSATELLITES WITH ACTUATORS FAILURES
 U.P.B. Sci. Bull., Seria D, Vol, 77, Iss 2, 2015 ISSN 1454-2358 COMPARISON OF FDI METHODS APPLIED ON NANOSATELLITES WITH ACTUATORS FAILURES Silvana RADU 1, Claudiu Ionuţ CHERCIU 2, Adrian-Mihail STOICA
U.P.B. Sci. Bull., Seria D, Vol, 77, Iss 2, 2015 ISSN 1454-2358 COMPARISON OF FDI METHODS APPLIED ON NANOSATELLITES WITH ACTUATORS FAILURES Silvana RADU 1, Claudiu Ionuţ CHERCIU 2, Adrian-Mihail STOICA
Spacecraft Attitude Control with RWs via LPV Control Theory: Comparison of Two Different Methods in One Framework
 Trans. JSASS Aerospace Tech. Japan Vol. 4, No. ists3, pp. Pd_5-Pd_, 6 Spacecraft Attitude Control with RWs via LPV Control Theory: Comparison of Two Different Methods in One Framework y Takahiro SASAKI,),
Trans. JSASS Aerospace Tech. Japan Vol. 4, No. ists3, pp. Pd_5-Pd_, 6 Spacecraft Attitude Control with RWs via LPV Control Theory: Comparison of Two Different Methods in One Framework y Takahiro SASAKI,),
Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS
 SSC17-P1-17 Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS Masayuki Katayama, Yuta Suzaki Mitsubishi Precision Company Limited 345 Kamikmachiya, Kamakura
SSC17-P1-17 Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS Masayuki Katayama, Yuta Suzaki Mitsubishi Precision Company Limited 345 Kamikmachiya, Kamakura
Mixed Control Moment Gyro and Momentum Wheel Attitude Control Strategies
 AAS03-558 Mixed Control Moment Gyro and Momentum Wheel Attitude Control Strategies C. Eugene Skelton II and Christopher D. Hall Department of Aerospace & Ocean Engineering Virginia Polytechnic Institute
AAS03-558 Mixed Control Moment Gyro and Momentum Wheel Attitude Control Strategies C. Eugene Skelton II and Christopher D. Hall Department of Aerospace & Ocean Engineering Virginia Polytechnic Institute
Physics 180A Test Points
 Physics 180A Test 3-10 Points Name You must complete six of the nine 10-point problems. You must completely cross off three 10-problems, thanks. Place your answers in the answer box. Watch your units and
Physics 180A Test 3-10 Points Name You must complete six of the nine 10-point problems. You must completely cross off three 10-problems, thanks. Place your answers in the answer box. Watch your units and
Phys 270 Final Exam. Figure 1: Question 1
 Phys 270 Final Exam Time limit: 120 minutes Each question worths 10 points. Constants: g = 9.8m/s 2, G = 6.67 10 11 Nm 2 kg 2. 1. (a) Figure 1 shows an object with moment of inertia I and mass m oscillating
Phys 270 Final Exam Time limit: 120 minutes Each question worths 10 points. Constants: g = 9.8m/s 2, G = 6.67 10 11 Nm 2 kg 2. 1. (a) Figure 1 shows an object with moment of inertia I and mass m oscillating
Fault Isolation of an Electro-mechanical Linear Actuator
 Fault Isolation of an Electro-mechanical Linear Actuator Matt Kemp 1, and Eric J. Martin 2 1,2 Monterey Bay Aquarium Research Institute, Moss Landing, CA, 95039, USA mkemp@mbari.org emartin@mbari.org ABSTRACT
Fault Isolation of an Electro-mechanical Linear Actuator Matt Kemp 1, and Eric J. Martin 2 1,2 Monterey Bay Aquarium Research Institute, Moss Landing, CA, 95039, USA mkemp@mbari.org emartin@mbari.org ABSTRACT
FAULT DETECTION ON A REACTION WHEEL BASED ON PARAMETER ESTIMATION
 FAULT DETECTION ON A REACTION WHEEL BASED ON PARAMETER ESTIMATION Alexandre Carvalho Leite, Hélio Koiti Kuga, Roberto Vieira da Fonseca Lopes Av. dos Astronautas, 1.758, Jd. Granja, Ed. Satélite Av. dos
FAULT DETECTION ON A REACTION WHEEL BASED ON PARAMETER ESTIMATION Alexandre Carvalho Leite, Hélio Koiti Kuga, Roberto Vieira da Fonseca Lopes Av. dos Astronautas, 1.758, Jd. Granja, Ed. Satélite Av. dos
Fault Diagnosis and Fault-Tolerant Control of Quadrotor UAVs
 Wright State University CORE Scholar Browse all Theses and Dissertations Theses and Dissertations 2016 Fault Diagnosis and Fault-Tolerant Control of Quadrotor UAVs Remus C. Avram Wright State University
Wright State University CORE Scholar Browse all Theses and Dissertations Theses and Dissertations 2016 Fault Diagnosis and Fault-Tolerant Control of Quadrotor UAVs Remus C. Avram Wright State University
Moment of Inertia Race
 Review Two points, A and B, are on a disk that rotates with a uniform speed about an axis. Point A is closer to the axis than point B. Which of the following is NOT true? 1. Point B has the greater tangential
Review Two points, A and B, are on a disk that rotates with a uniform speed about an axis. Point A is closer to the axis than point B. Which of the following is NOT true? 1. Point B has the greater tangential
Fault Detection and Isolation of the Wind Turbine Benchmark: an Estimation-based Approach
 Milano (Italy) August - September, 11 Fault Detection and Isolation of the Wind Turbine Benchmark: an Estimation-based Approach Xiaodong Zhang, Qi Zhang Songling Zhao Riccardo Ferrari Marios M. Polycarpou,andThomas
Milano (Italy) August - September, 11 Fault Detection and Isolation of the Wind Turbine Benchmark: an Estimation-based Approach Xiaodong Zhang, Qi Zhang Songling Zhao Riccardo Ferrari Marios M. Polycarpou,andThomas
Dynamics. describe the relationship between the joint actuator torques and the motion of the structure important role for
 Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Controllability Analysis of A Two Degree of Freedom Nonlinear Attitude Control System
 Controllability Analysis of A Two Degree of Freedom Nonlinear Attitude Control System Jinglai Shen, Amit K Sanyal, and N Harris McClamroch Department of Aerospace Engineering The University of Michigan
Controllability Analysis of A Two Degree of Freedom Nonlinear Attitude Control System Jinglai Shen, Amit K Sanyal, and N Harris McClamroch Department of Aerospace Engineering The University of Michigan
ET3-7: Modelling I(V) Introduction and Objectives. Electrical, Mechanical and Thermal Systems
 Introduction and Objectives. Electrical, Mechanical and Thermal Systems") ET3-7: Modelling I(V) Introduction and Objectives Electrical, Mechanical and Thermal Systems Objectives analyse and model basic linear dynamic systems -Electrical -Mechanical -Thermal Recognise the analogies
ET3-7: Modelling I(V) Introduction and Objectives Electrical, Mechanical and Thermal Systems Objectives analyse and model basic linear dynamic systems -Electrical -Mechanical -Thermal Recognise the analogies
Model Based Fault Detection and Diagnosis Using Structured Residual Approach in a Multi-Input Multi-Output System
 SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 4, No. 2, November 2007, 133-145 Model Based Fault Detection and Diagnosis Using Structured Residual Approach in a Multi-Input Multi-Output System A. Asokan
SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 4, No. 2, November 2007, 133-145 Model Based Fault Detection and Diagnosis Using Structured Residual Approach in a Multi-Input Multi-Output System A. Asokan
CHAPTER 8 CONSERVATION LAWS
 CHAPTER 8 CONSERVATION LAWS Outlines 1. Charge and Energy 2. The Poynting s Theorem 3. Momentum 4. Angular Momentum 2 Conservation of charge and energy The net amount of charges in a volume V is given
CHAPTER 8 CONSERVATION LAWS Outlines 1. Charge and Energy 2. The Poynting s Theorem 3. Momentum 4. Angular Momentum 2 Conservation of charge and energy The net amount of charges in a volume V is given
Line following of a mobile robot
 Line following of a mobile robot May 18, 004 1 In brief... The project is about controlling a differential steering mobile robot so that it follows a specified track. Steering is achieved by setting different
Line following of a mobile robot May 18, 004 1 In brief... The project is about controlling a differential steering mobile robot so that it follows a specified track. Steering is achieved by setting different
Fault Detection and Diagnosis for a Three-tank system using Structured Residual Approach
 Fault Detection and Diagnosis for a Three-tank system using Structured Residual Approach A.Asokan and D.Sivakumar Department of Instrumentation Engineering, Faculty of Engineering & Technology Annamalai
Fault Detection and Diagnosis for a Three-tank system using Structured Residual Approach A.Asokan and D.Sivakumar Department of Instrumentation Engineering, Faculty of Engineering & Technology Annamalai
Attitude Control Strategy for HAUSAT-2 with Pitch Bias Momentum System
 SSC06-VII-5 Attitude Control Strategy for HAUSAT-2 with Pitch Bias Momentum System Young-Keun Chang, Seok-Jin Kang, Byung-Hoon Lee, Jung-on Choi, Mi-Yeon Yun and Byoung-Young Moon School of Aerospace and
SSC06-VII-5 Attitude Control Strategy for HAUSAT-2 with Pitch Bias Momentum System Young-Keun Chang, Seok-Jin Kang, Byung-Hoon Lee, Jung-on Choi, Mi-Yeon Yun and Byoung-Young Moon School of Aerospace and
Mathematical Models for the Triaxial Attitude Control Testbed
 Draft Article (For Engineering Journals) Mathematical Models for the Triaxial Attitude Control Testbed Sangbum Cho, Jinglai Shen, N. Harris McClamroch Department of Aerospace Engineering University of
Draft Article (For Engineering Journals) Mathematical Models for the Triaxial Attitude Control Testbed Sangbum Cho, Jinglai Shen, N. Harris McClamroch Department of Aerospace Engineering University of
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING
 FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
7. The gyroscope. 7.1 Introduction. 7.2 Theory. a) The gyroscope
 The gyroscope") K 7. The gyroscope 7.1 Introduction This experiment concerns a special type of motion of a gyroscope, called precession. From the angular frequency of the precession, the moment of inertia of the spinning
K 7. The gyroscope 7.1 Introduction This experiment concerns a special type of motion of a gyroscope, called precession. From the angular frequency of the precession, the moment of inertia of the spinning
A FORCE BALANCE TECHNIQUE FOR MEASUREMENT OF YOUNG'S MODULUS. 1 Introduction
 A FORCE BALANCE TECHNIQUE FOR MEASUREMENT OF YOUNG'S MODULUS Abhinav A. Kalamdani Dept. of Instrumentation Engineering, R. V. College of Engineering, Bangalore, India. kalamdani@ieee.org Abstract: A new
A FORCE BALANCE TECHNIQUE FOR MEASUREMENT OF YOUNG'S MODULUS Abhinav A. Kalamdani Dept. of Instrumentation Engineering, R. V. College of Engineering, Bangalore, India. kalamdani@ieee.org Abstract: A new
Internal Torques and Forces in Gyrostats with Magnetically Suspended Rotors
 Internal Torques and Forces in Gyrostats with Magnetically Suspended Rotors by Marcus Carl Pressl Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment
Internal Torques and Forces in Gyrostats with Magnetically Suspended Rotors by Marcus Carl Pressl Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment
Estimation of Tire-Road Friction by Tire Rotational Vibration Model
 53 Research Report Estimation of Tire-Road Friction by Tire Rotational Vibration Model Takaji Umeno Abstract Tire-road friction is the most important piece of information used by active safety systems.
53 Research Report Estimation of Tire-Road Friction by Tire Rotational Vibration Model Takaji Umeno Abstract Tire-road friction is the most important piece of information used by active safety systems.
is acting on a body of mass m = 3.0 kg and changes its velocity from an initial
 PHYS 101 second major Exam Term 102 (Zero Version) Q1. A 15.0-kg block is pulled over a rough, horizontal surface by a constant force of 70.0 N acting at an angle of 20.0 above the horizontal. The block
PHYS 101 second major Exam Term 102 (Zero Version) Q1. A 15.0-kg block is pulled over a rough, horizontal surface by a constant force of 70.0 N acting at an angle of 20.0 above the horizontal. The block
Laws of gyroscopes / cardanic gyroscope
 Principle If the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation frequency and gyrofrequency is examined
Principle If the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation frequency and gyrofrequency is examined
CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5
 1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
Adaptive Backstepping Control for Optimal Descent with Embedded Autonomy
 Adaptive Backstepping Control for Optimal Descent with Embedded Autonomy Maodeng Li, Wuxing Jing Department of Aerospace Engineering, Harbin Institute of Technology, Harbin, Heilongjiang, 150001, China
Adaptive Backstepping Control for Optimal Descent with Embedded Autonomy Maodeng Li, Wuxing Jing Department of Aerospace Engineering, Harbin Institute of Technology, Harbin, Heilongjiang, 150001, China
c 2009 John Gregory Warner
 c 2009 John Gregory Warner ATTITUDE DETERMINATION AND CONTROL OF NANO-SATELLITES BY JOHN GREGORY WARNER THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in
c 2009 John Gregory Warner ATTITUDE DETERMINATION AND CONTROL OF NANO-SATELLITES BY JOHN GREGORY WARNER THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in
Recap: Solid Rotational Motion (Chapter 8) displacement velocity acceleration Newton s 2nd law τ = I.α N.s τ = F. l moment of inertia mass size
 displacement velocity acceleration Newton s 2nd law τ = I.α N.s τ = F. l moment of inertia mass size") Recap: Solid Rotational Motion (Chapter 8) We have developed equations to describe rotational displacement θ, rotational velocity ω and rotational acceleration α. We have used these new terms to modify
Recap: Solid Rotational Motion (Chapter 8) We have developed equations to describe rotational displacement θ, rotational velocity ω and rotational acceleration α. We have used these new terms to modify
Lecture AC-1. Aircraft Dynamics. Copy right 2003 by Jon at h an H ow
 Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
AA 528 Spacecraft Dynamics and Control. Mehran Mesbahi Aeronautics & Astronautics Winter 2017 University of Washington
 AA 528 Spacecraft Dynamics and Control Mehran Mesbahi Aeronautics & Astronautics Winter 2017 University of Washington Spacecraft dynamics and control What is this class all about? what is in the name?
AA 528 Spacecraft Dynamics and Control Mehran Mesbahi Aeronautics & Astronautics Winter 2017 University of Washington Spacecraft dynamics and control What is this class all about? what is in the name?
Optimal Fault-Tolerant Configurations of Thrusters
 Optimal Fault-Tolerant Configurations of Thrusters By Yasuhiro YOSHIMURA ) and Hirohisa KOJIMA, ) ) Aerospace Engineering, Tokyo Metropolitan University, Hino, Japan (Received June st, 7) Fault tolerance
Optimal Fault-Tolerant Configurations of Thrusters By Yasuhiro YOSHIMURA ) and Hirohisa KOJIMA, ) ) Aerospace Engineering, Tokyo Metropolitan University, Hino, Japan (Received June st, 7) Fault tolerance
Lecture 9 - Rotational Dynamics
 Lecture 9 - Rotational Dynamics A Puzzle... Angular momentum is a 3D vector, and changing its direction produces a torque τ = dl. An important application in our daily lives is that bicycles don t fall
Lecture 9 - Rotational Dynamics A Puzzle... Angular momentum is a 3D vector, and changing its direction produces a torque τ = dl. An important application in our daily lives is that bicycles don t fall
Analytical Mechanics. of Space Systems. tfa AA. Hanspeter Schaub. College Station, Texas. University of Colorado Boulder, Colorado.
 Analytical Mechanics of Space Systems Third Edition Hanspeter Schaub University of Colorado Boulder, Colorado John L. Junkins Texas A&M University College Station, Texas AIM EDUCATION SERIES Joseph A.
Analytical Mechanics of Space Systems Third Edition Hanspeter Schaub University of Colorado Boulder, Colorado John L. Junkins Texas A&M University College Station, Texas AIM EDUCATION SERIES Joseph A.
Chapter 8 Rotational Motion and Equilibrium. 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction
 Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
Hysteresis Nutation Damper for Spin Satellite
 Hysteresis Nutation Damper for Spin Satellite Hamed Shahmohamadi Ousaloo * Send Orders for Reprints to reprints@benthamscience.net The Open Aerospace Engineering Journal, 2013, 6, 1-5 1 Open Access Space
Hysteresis Nutation Damper for Spin Satellite Hamed Shahmohamadi Ousaloo * Send Orders for Reprints to reprints@benthamscience.net The Open Aerospace Engineering Journal, 2013, 6, 1-5 1 Open Access Space
Exercise Torque Magnitude Ranking Task. Part A
 Exercise 10.2 Calculate the net torque about point O for the two forces applied as in the figure. The rod and both forces are in the plane of the page. Take positive torques to be counterclockwise. τ 28.0
Exercise 10.2 Calculate the net torque about point O for the two forces applied as in the figure. The rod and both forces are in the plane of the page. Take positive torques to be counterclockwise. τ 28.0
Phys101 Lectures 19, 20 Rotational Motion
 Phys101 Lectures 19, 20 Rotational Motion Key points: Angular and Linear Quantities Rotational Dynamics; Torque and Moment of Inertia Rotational Kinetic Energy Ref: 10-1,2,3,4,5,6,8,9. Page 1 Angular Quantities
Phys101 Lectures 19, 20 Rotational Motion Key points: Angular and Linear Quantities Rotational Dynamics; Torque and Moment of Inertia Rotational Kinetic Energy Ref: 10-1,2,3,4,5,6,8,9. Page 1 Angular Quantities
A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities
 A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities Sanny Omar Dr. David Beale Dr. JM Wersinger Introduction ADACS designed for CubeSats CubeSats
A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities Sanny Omar Dr. David Beale Dr. JM Wersinger Introduction ADACS designed for CubeSats CubeSats
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
MECH 3140 Final Project
 MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
Lab 11: Rotational Dynamics
 Lab 11: Rotational Dynamics Objectives: To understand the relationship between net torque and angular acceleration. To understand the concept of the moment of inertia. To understand the concept of angular
Lab 11: Rotational Dynamics Objectives: To understand the relationship between net torque and angular acceleration. To understand the concept of the moment of inertia. To understand the concept of angular
LAWS OF GYROSCOPES / CARDANIC GYROSCOPE
 LAWS OF GYROSCOPES / CARDANC GYROSCOPE PRNCPLE f the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation
LAWS OF GYROSCOPES / CARDANC GYROSCOPE PRNCPLE f the axis of rotation of the force-free gyroscope is displaced slightly, a nutation is produced. The relationship between precession frequency or nutation
Lezione 9 30 March. Scribes: Arianna Marangon, Matteo Vitturi, Riccardo Prota
 Control Laboratory: a.a. 2015/2016 Lezione 9 30 March Instructor: Luca Schenato Scribes: Arianna Marangon, Matteo Vitturi, Riccardo Prota What is left to do is how to design the low pass pole τ L for the
Control Laboratory: a.a. 2015/2016 Lezione 9 30 March Instructor: Luca Schenato Scribes: Arianna Marangon, Matteo Vitturi, Riccardo Prota What is left to do is how to design the low pass pole τ L for the