Spinning Satellites Examples. ACS: Gravity Gradient. ACS: Single Spin
|
|
|
- Diana Stokes
- 5 years ago
- Views:
Transcription

 is composed of : Attitude Sensors, Controller, Actuators.")


1 Attitude Determination and Attitude Control Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope. So the satellite attitude needs to be measured and controlled. Attitude Control Is the control of the angular position and rotation of the spacecraft, either relative to the object that it is orbiting (Earth, Moon..), or relative to the celestial sphere. The attitude control system (ACS) is composed of : Attitude Sensors, Controller, Actuators. Desired Attitude Estimated Attitude determines the desired torques, and send electrical commands Estimates the current attitude applies the desired torques take the measurements Actual Attitude Yaw = Imbardata Pitch = Beccheggio Roll = Rollio XY = piano dell orbita ACS: Gravity Gradient Description: Uses the change in gravity with altitude to create a torque when the principal axes are not aligned with the orbital reference frame. Long booms are usually extended to create the torque. The gravity gradient provides the restoring or stabilizing torque but does not damp the librational motion. Viscous dampers are added to dissipate the energy and damp out the librations. The gravity gradient torque can be a control torque but it can also be a disturbance torque if there are products of inertia. For example, LANDSAT had large products of inertia and the gravity gradient was the dominant disturbance torque. Advantages: Simple, reliable, cheap, long lifetime. Disadvantages: Poor pointing accuracy (5 deg), poor yaw control, thermal bending of boom causes oscillations, tendency to flip upside down. Description: The entire spacecraft spins, which provides inertial orientation. The spinning provides gyroscopic stiffness, and stability. The nutation damper damps out the nutation, but precession still exists. Spin is about the axis of maximum moment of inertia, that is usually, but not always, the orbit normal. Solar arrays are fixed to the body. Advantages: Simple, reliable, long lifetime. Disadvantages: Sensor collection is limited to scanning obtained by spin motion. High angular momentum results in poor maneuverability, i.e., reorientation of spin axis. Poor power efficiency, only half the solar cells are illuminated at any one time. Must spin about the axis of maximum moment of inertia. ACS: Single Spin Spinning Satellites Examples Spinning is used in satellites for astronomy when sky scanning is required. COBE, WMAP, Planck all spin at 1-10 rpm, so the telescopes (antennas) can scan the sky at a rate of deg/s. Complex scan patterns can be obtained by combining satellite spin and slow reorientation manouvers (see COBE, WMAP, Planck) 1

2 Flat spin: in the absence of perturbations the spin axis orientation remains constant with respect to the inertial frame of distant stars Not useful for astronomy. Using the ACS and perturbations, the spin axis orientation can be continuously reoriented away from the earth center. This is useful for full-sky surveys (COBE) Dual-Spin Satellite (2/6) A vehicle consisting of two primary components free to perform relative rotations about a common bearing axis is called a "dual- spin" vehicle, and the idea of stabilizing such a vehicle by spinning one part (the "rotor") while the other part (the "despun platform") rotates more slowly - or not at all - is called the dual-spin attitude stabilization concept. This dual-spin configuration thus serves to create a spin stabilized satellite. 3 A A C A C A 3 S Rotor Platform Description: ACS: Dual Spin The limitations of single spin satellites are partially overcome with dual spin satellites. With a dual spin satellite the payload, e.g. the antenna, is despun while the other portion of spacecraft spins to provide gyroscopic stability. Nutation is damped by nutation damper, located on either the spun or despun portion. Many of the geosynchronous communication satellites have been dual spin. Advantages: Despun payload allows Earth pointing payload. Can have spin about minimum moment of inertia axis. Reliable, long lifetime. Disadvantages: Poor power efficiency because solar cells are on spinning portion. High angular momentum results in poor maneuverability, i.e., reorientation of spin axis. Sensitive to mass imbalances. ACS: Momentum Bias Description: The momentum bias satellite is a variation of the dual spin concept that overcomes some of the problems of the dual spin. With the momentum bias spacecraft the gyroscopic stability is provided by a rapidly spinning momentum wheel rather than the bus. The payload and bus are despun or rotating at orbital rate. The momentum wheel provides control about the spin (pitch) axis and some combination of nutation damper, magnetic torquing, or propellant provide control about the yaw and roll axes. Use of propellant is avoided whenever possible. Magnetic or propellant are used for momentum damping. Advantages: Better pointing accuracy, better power efficiency due to despun solar arrays. Still relatively cheap and not complex which means less weight than three axis systems. When the pointing requirements are not stringent, i.e., > 0.5 deg, the momentum bias ACS is usually the desired approach. The momentum bias approach with magnetic torquers is the dominant type of ACS in LEO. Disadvantages: Usually poor yaw control. Gyroscopic stiffness results in poor maneuverability. Poorer reliability and lifetime. Due to its lower cost and complexity and relatively accurate pointing capability this has been the most popular type of ACS. 2




3 Typically a spacecraft will have several momentum wheels oriented along orthogonal axes. To change its rotation along those axes it will increase or decrease the spin of the momentum wheels in the opposite direction. When the spacecraft achieves its desired orientation, it can then halt its rotation by braking the momentum wheels by the same amount. Momentum wheels are usually spun by electric motors. Both spin-up and braking are controlled electronically by computer controls. The strength of the materials of a momentum wheel establishes a speed at which the wheel would come apart, and therefore how much angular momentum it can store. Since the momentum wheel is a small fraction of the spacecraft's total inertia, easily-measurable changes in its speed provide very precise changes in angle. Reaction (momentum) wheels Example: In the CNES ACS: Three magnetic-bearing reaction wheels apply a torque on the satellite to rotate it about one of its three axes. Two magnetic torquers interact with the Earth's magnetic field to generate torques and thus control the speed of rotation of the reaction wheels. Thrusters complete the system. Description: ACS: Three Axis ACS methods: All three axes are independently controlled by mass expulsion, reaction wheels (RWs) or control moment gyros (CMGs). Usually RWs or CMGs are used for control and propellant (sometimes magnetic torquing) is used for momentum dumping. Gravity gradient Passive Semi-passive Active Momentum bias with magnetics Propellant Advantages: Pointing accuracy, maneuverability and adaptability to changing mission requirements. Disadvantages: Spinner with nutation damper Dual spinner with nutation damper Reaction wheels with magnetics for momentum dumping CMGs with magnetics for momentum dumping Reaction wheels with propellant for momentum dumping CMGs with propellant for momentum dumping Cost, weight, complexity and lifetime. Attitude Control Methods and their Capabilities Actuators Actuators are usually broken into four classes: mass expulsion, momentum exchange, environmental and dissipative. An ACS may have actuators from any or all the classes. Mass Expulsion Momentum Exc. Environmental Dissipative Reaction wheel Gravity gradient Nutation damper Momentum wheel Magnetic GG viscous damper CMG Aerodynamic There are two types of magnetic torquers. Those used for momentum dumping or control in momentum bias systems, and the eddy current dampers used in gravity gradient systems. Range of torques available from some of these actuators (From Chobotov) Actuator Type Torque Range (N-m) From this table we see that RWs Reaction Control (RCS) and CMGs are used when precision pointing and/or high Magnetic Torquer torque is required. Satellites that Gravity Gradient perform rapid attitude maneuvers Aerodynamic or have articulating payloads Reaction Wheel which create large disturbance Control Moment Gyro torques require CMGs 3
, and 6. GPS receivers.")




. Solar flux goes as 1/r 2.")


")
4 Sensors The types of sensors used for attitude determination are: 1. horizon sensors (or conical Earth scanners), 2. sun sensors, 3. star sensors, 4. magnetometers, 5. inertial reference units (Inertia Measurement Unit or attitude reference units ARU), and 6. GPS receivers. Horizon sensors measure pitch and roll to an accuracy of about deg. An accuracy less than 0.05 deg can be achieved by extensive calibration and accounting for the equatorial bulge. Sun and star sensors provide directions. An horizon sensor does not provide yaw information (for momentum bias systems it is not necessary to measure yaw). One wide- FOV or two narrow-fov star sensors are needed to provide attitude. Since the star sensors cannot provide continuous attitude measurements an IMU/ARU is needed to provide the attitude between measurements. IMUs suffer from drift and biases and need frequent updates which are provided by the star sensors. Magnetometers measure Earth's magnetic. Accuracies no better than 1 deg can be obtained. The GPS receivers are used in an interferometer mode to determine attitude. Accuracies as good as 0.01 deg are expected using GPS. Sun Sensors Most common because they are light weight, not expensive, limited power required and because they provide an accuracy which is acceptable for most of the missions. Sun is the principal source of energy (exemption: interplanetary spacecraft). Solar flux goes as 1/r 2. Sun (in the Inertial Reference Frame) is evaluated by using interpolating functions (armonic series expansion) which least square fit the Sun positions recorded in the star atlas. They are used to synchronize command with spin period, and they are used to protect star sensors. At 1AU the sun may be considered as a point (0.267 deg.). For GEO there is the parallax error (0.03 deg as max values). Presence Sun Sensors Presence Sun Sensors Based on the Snell refraction law. Sun rays Shadow rod Shadow area Entrance slit Photocell Presence sun sensors provide the sun crossing time only, or the sun presence within the sensor FOV ' nsin sin nsin 1 Image plane mask Aperture Lens Photocells Grid slit Used to synchronize pulsed command (spin-up, spin-down) to maneuvre, and to turn on/off onboard experiments and instrumentation. Photocell at the base (below the slit) Photo cell 2 Photocell 1 Sun image Mirror Analogic Sun Sensors Reference axis Normal Sun rays Normal Sensor 2 Sensor 1 Photocell T I( ) I(0) d n I(0)cos Normal Normal Mask Sun rays Photocells Photocell #2 Photocell #1 4
 Measurement Command")
: 1)")








5 Sensor #1 Output current Sensor #2 Angle (deg) Measurement Command Digital Sun Sensors Command: sun presence Measurement (4 parts): 1) ATA, 2) Sign bit, 3) Code bits, 4) Interpolating bits. Command Measurement Digital Sun sensor Grid slits Photocells Binary and Gray code The gain of the Gray code consists of the fact that the bit string, which represents the angle measure, changes one bit only at each digital step. Decimal Binary Gray Decimal Binary Gray Sun angle Binary code Gray code 5
6 Double Digital Sun Sensor Photocells Earth horizon sensor Best range: of CO 2 (less high altitude clouds contr.) Earth horizon sensor Measure two crossing times t and t 1 2 With angular speed, the measured angle is ( t t ) Two measured angles, and 1 2 allow to evaluate the Nadir direction. 2 1 Relative radiance 400 (IR) and 30,000 (visible) Relative radiance Hot Moon Cold Moon Moon horizon sensor Hard horizon Moon temperature range: 240 deg to +30 deg Hot area for cold Moon Hot area for hot Moon Displacement angle (deg) Earth/Sun sensors for spinning S/C Meridian slit Inclined slit Satellite equator Moon center distance Cold horizon position Hot horizon position 6






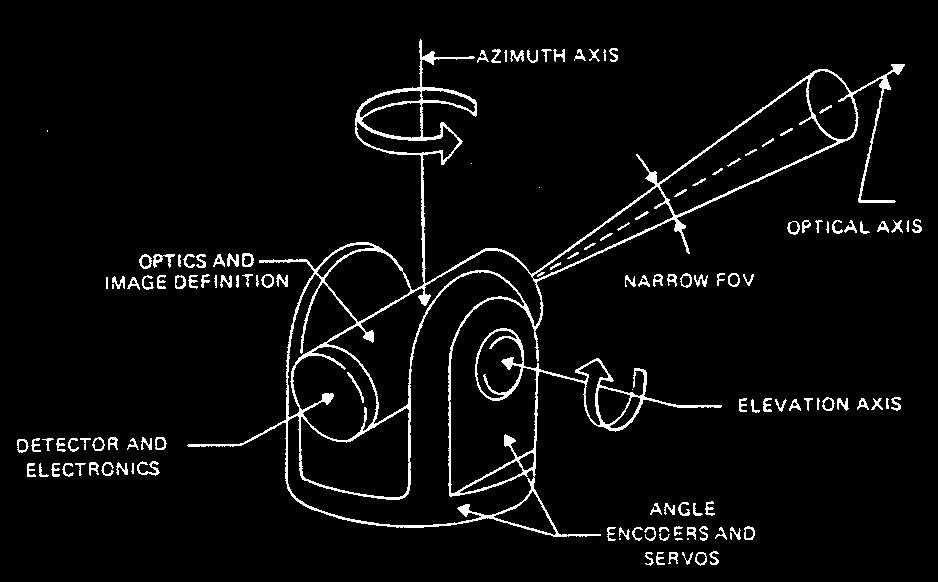
7 Star sensor for spinning S/C The Archeops Star Sensor Archeops was a telescope on a spinning balloon payload, designed to map a significant fraction of the CMB sky with a microwave telescope. Optical axis Elevation slit Azimuth slit Da Nati et al. Mem. S.A.It




8 Star Sensor Da Nati et al. Mem. S.A.It Optical Gyroscopes They are based on the Sagnac effect (see Shamir, Adi, An overview of Optical Gyroscopes Theory, Practical Aspects, Applications and Future Trends, May 16, 2006 Terry Pearson, How a gyroscope works, Febuary 1997, in which two light waves traveling in opposite direction in the same closed loop and generated by the same source, undergo a phase shift proportional to the rotating speed of the closed loop with respect to the inertial frame.both laser and fiber optic gyros replaced mechanical gyros 8




9 Jupiter scans Focal Plane Archeops Kiruna 2002 Star Trackers Electronics Photomultiplier Optical system Star Grid Baffle Da Nati et al. Mem. S.A.It




 Electronic unit Da Nati")

10 Da Nati et al. Mem.S.A.It Magnetometers V They may be used at altitudes less than 1,000 Km, only. (Earth magnetic field decreases with radius as 1/r 3 ) Small precision is associated with the fact that the EMF Models are not so accurate. d Edl dt B Sensors Biases not negligeable (residuals of magnetic fields caused by onboard circuits) Electronic unit Da Nati et al. Mem. S.A.It Signal processing and Analog to digital converter Telemetry Link Typical GN&C Sensors (Wertz) Attitude Determination Systems 10
Attitude Determination and. Attitude Control
 Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
Lecture Module 5: Introduction to Attitude Stabilization and Control
 1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
Spacecraft Bus / Platform
 Spacecraft Bus / Platform Propulsion Thrusters ADCS: Attitude Determination and Control Subsystem Shield CDH: Command and Data Handling Subsystem Payload Communication Thermal Power Structure and Mechanisms
Spacecraft Bus / Platform Propulsion Thrusters ADCS: Attitude Determination and Control Subsystem Shield CDH: Command and Data Handling Subsystem Payload Communication Thermal Power Structure and Mechanisms
Generation X. Attitude Control Systems (ACS) Aprille Ericsson Dave Olney Josephine San. July 27, 2000
 Aprille Ericsson Dave Olney Josephine San. July 27, 2000") Generation X Attitude Control Systems (ACS) Aprille Ericsson Dave Olney Josephine San July 27, 2000 ACS Overview Requirements Assumptions Disturbance Torque Assessment Component and Control Mode Recommendations
Generation X Attitude Control Systems (ACS) Aprille Ericsson Dave Olney Josephine San July 27, 2000 ACS Overview Requirements Assumptions Disturbance Torque Assessment Component and Control Mode Recommendations
Satellite Components & Systems. Dr. Ugur GUVEN Aerospace Engineer (P.hD) Nuclear Science & Technology Engineer (M.Sc)
 Nuclear Science & Technology Engineer (M.Sc)") Satellite Components & Systems Dr. Ugur GUVEN Aerospace Engineer (P.hD) Nuclear Science & Technology Engineer (M.Sc) Definitions Attitude: The way the satellite is inclined toward Earth at a certain inclination
Satellite Components & Systems Dr. Ugur GUVEN Aerospace Engineer (P.hD) Nuclear Science & Technology Engineer (M.Sc) Definitions Attitude: The way the satellite is inclined toward Earth at a certain inclination
Design of Attitude Determination and Control Subsystem
 Design of Attitude Determination and Control Subsystem 1) Control Modes and Requirements Control Modes: Control Modes Explanation 1 ) Spin-Up Mode - Acquisition of Stability through spin-up maneuver -
Design of Attitude Determination and Control Subsystem 1) Control Modes and Requirements Control Modes: Control Modes Explanation 1 ) Spin-Up Mode - Acquisition of Stability through spin-up maneuver -
Sensors: a) Gyroscope. Micro Electro-Mechanical (MEM) Gyroscopes: (MEM) Gyroscopes. Needs:
 Gyroscope. Micro Electro-Mechanical (MEM) Gyroscopes: (MEM) Gyroscopes. Needs:") Sensors: Needs: Data redundancy Data for both situations: eclipse and sun Question of sampling frequency Location and size/weight Ability to resist to environment Low consumption Low price a) Gyroscope
Sensors: Needs: Data redundancy Data for both situations: eclipse and sun Question of sampling frequency Location and size/weight Ability to resist to environment Low consumption Low price a) Gyroscope
A Concept of Nanosatellite Small Fleet for Earth Observation
 A Concept of Nanosatellite Small Fleet for Earth Observation Prof. Janusz Narkiewicz jnark@meil.pw.edu.pl Sebastian Topczewski stopczewski@meil.pw.edu.pl Mateusz Sochacki msochacki@meil.pw.edu.pl 10-11
A Concept of Nanosatellite Small Fleet for Earth Observation Prof. Janusz Narkiewicz jnark@meil.pw.edu.pl Sebastian Topczewski stopczewski@meil.pw.edu.pl Mateusz Sochacki msochacki@meil.pw.edu.pl 10-11
Attitude Control Strategy for HAUSAT-2 with Pitch Bias Momentum System
 SSC06-VII-5 Attitude Control Strategy for HAUSAT-2 with Pitch Bias Momentum System Young-Keun Chang, Seok-Jin Kang, Byung-Hoon Lee, Jung-on Choi, Mi-Yeon Yun and Byoung-Young Moon School of Aerospace and
SSC06-VII-5 Attitude Control Strategy for HAUSAT-2 with Pitch Bias Momentum System Young-Keun Chang, Seok-Jin Kang, Byung-Hoon Lee, Jung-on Choi, Mi-Yeon Yun and Byoung-Young Moon School of Aerospace and
Attitude dynamics and control
 Attitude dynamics and control First AstroNet-II Training School "Astrodynamics of natural and artificial satellites: from regular to chaotic motions" Department of Mathematics, University of Roma Tor Vergata,
Attitude dynamics and control First AstroNet-II Training School "Astrodynamics of natural and artificial satellites: from regular to chaotic motions" Department of Mathematics, University of Roma Tor Vergata,
Presentation by Indian Delegation. to 49 th STSC UNCOPUOS. February 2012 Vienna
 Presentation by Indian Delegation to 49 th STSC UNCOPUOS February 2012 Vienna ASTROSAT Astrosat is India s first dedicated multiwavelength astronomy satellite with a capability to observe target sources
Presentation by Indian Delegation to 49 th STSC UNCOPUOS February 2012 Vienna ASTROSAT Astrosat is India s first dedicated multiwavelength astronomy satellite with a capability to observe target sources
Attitude Determination and Control Subsystem (ADCS) Review
 Review") Attitude Determination and Control Subsystem (ADCS) Review Contents Attitude Determination and Control Subsystem (ADCS) Function Impact of Mission Requirements and Other Subsystems on ADCS ADCS Design
Attitude Determination and Control Subsystem (ADCS) Review Contents Attitude Determination and Control Subsystem (ADCS) Function Impact of Mission Requirements and Other Subsystems on ADCS ADCS Design
Spacecraft Subsystems Part 1 Fundamentals of Attitude Control
 Spacecraft Subsystems Part 1 Fundamentals of Attitude Control by Michael A. Benoist, P.E. Contents 1. Introduction... 4 Reference Frames... 6 Representations... 7 Dynamics... 11 2. Determination Methods...
Spacecraft Subsystems Part 1 Fundamentals of Attitude Control by Michael A. Benoist, P.E. Contents 1. Introduction... 4 Reference Frames... 6 Representations... 7 Dynamics... 11 2. Determination Methods...
A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities
 A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities Sanny Omar Dr. David Beale Dr. JM Wersinger Introduction ADACS designed for CubeSats CubeSats
A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities Sanny Omar Dr. David Beale Dr. JM Wersinger Introduction ADACS designed for CubeSats CubeSats
MAE 142 Homework #5 Due Friday, March 13, 2009
 MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
GP-B Attitude and Translation Control. John Mester Stanford University
 GP-B Attitude and Translation Control John Mester Stanford University 1 The GP-B Challenge Gyroscope (G) 10 7 times better than best 'modeled' inertial navigation gyros Telescope (T) 10 3 times better
GP-B Attitude and Translation Control John Mester Stanford University 1 The GP-B Challenge Gyroscope (G) 10 7 times better than best 'modeled' inertial navigation gyros Telescope (T) 10 3 times better
ESSE Payload Design. 1.2 Introduction to Space Missions
 ESSE4360 - Payload Design 1.2 Introduction to Space Missions Earth, Moon, Mars, and Beyond Department of Earth and Space Science and Engineering Room 255, Petrie Science and Engineering Building Tel: 416-736
ESSE4360 - Payload Design 1.2 Introduction to Space Missions Earth, Moon, Mars, and Beyond Department of Earth and Space Science and Engineering Room 255, Petrie Science and Engineering Building Tel: 416-736
Pointing Control for Low Altitude Triple Cubesat Space Darts
 Pointing Control for Low Altitude Triple Cubesat Space Darts August 12 th, 2009 U.S. Naval Research Laboratory Washington, D.C. Code 8231-Attitude Control System James Armstrong, Craig Casey, Glenn Creamer,
Pointing Control for Low Altitude Triple Cubesat Space Darts August 12 th, 2009 U.S. Naval Research Laboratory Washington, D.C. Code 8231-Attitude Control System James Armstrong, Craig Casey, Glenn Creamer,
Sensors for mobile robots
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 2 Sensors for mobile robots Sensors are used to perceive, analyze and understand the environment
5.12 The Aerodynamic Assist Trajectories of Vehicles Propelled by Solar Radiation Pressure References...
 1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
Attitude control system for ROCSAT-3 microsatellite: a conceptual design
 Acta Astronautica 56 (5) 9 5 www.elsevier.com/locate/actaastro Attitude control system for ROCSAT- microsatellite: a conceptual design Y.W. Jan a;b; ;, J.C. Chiou b; a National Space Program Oce, Hsinchu,
Acta Astronautica 56 (5) 9 5 www.elsevier.com/locate/actaastro Attitude control system for ROCSAT- microsatellite: a conceptual design Y.W. Jan a;b; ;, J.C. Chiou b; a National Space Program Oce, Hsinchu,
Design Architecture of Attitude Determination and Control System of ICUBE
 Design Architecture of Attitude Determination and Control System of ICUBE 9th Annual Spring CubeSat Developers' Workshop, USA Author : Co-Author: Affiliation: Naqvi Najam Abbas Dr. Li YanJun Space Academy,
Design Architecture of Attitude Determination and Control System of ICUBE 9th Annual Spring CubeSat Developers' Workshop, USA Author : Co-Author: Affiliation: Naqvi Najam Abbas Dr. Li YanJun Space Academy,
Infrared Earth Horizon Sensors for CubeSat Attitude Determination
 Infrared Earth Horizon Sensors for CubeSat Attitude Determination Tam Nguyen Department of Aeronautics and Astronautics Massachusetts Institute of Technology Outline Background and objectives Nadir vector
Infrared Earth Horizon Sensors for CubeSat Attitude Determination Tam Nguyen Department of Aeronautics and Astronautics Massachusetts Institute of Technology Outline Background and objectives Nadir vector
On-Orbit Performance of KOMPSAT-2 AOCS Korea Aerospace Research Institute Seung-Wu Rhee, Ph. D.
 SSC07-VII-9 On-Orbit Performance of AOCS 2007. 8. Korea Aerospace Research Institute Seung-Wu Rhee, Ph. D. 1 Program - is Low Earth Orbit Satellite - Mission : Cartographic Mission of Korean Peninsula
SSC07-VII-9 On-Orbit Performance of AOCS 2007. 8. Korea Aerospace Research Institute Seung-Wu Rhee, Ph. D. 1 Program - is Low Earth Orbit Satellite - Mission : Cartographic Mission of Korean Peninsula
Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS
 SSC17-P1-17 Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS Masayuki Katayama, Yuta Suzaki Mitsubishi Precision Company Limited 345 Kamikmachiya, Kamakura
SSC17-P1-17 Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS Masayuki Katayama, Yuta Suzaki Mitsubishi Precision Company Limited 345 Kamikmachiya, Kamakura
CHAPTER 3 PERFORMANCE
 PERFORMANCE 3.1 Introduction The LM-3A performance figures given in this chapter are based on the following assumptions: Launching from XSLC (Xichang Satellite Launch Center, Sichuan Province, China),
PERFORMANCE 3.1 Introduction The LM-3A performance figures given in this chapter are based on the following assumptions: Launching from XSLC (Xichang Satellite Launch Center, Sichuan Province, China),
Attitude Determination and Control
 Attitude Determination and Control Dan Hegel Director, Advanced Development hegel@bluecanyontech.com 1 Dan Hegel - Intro Director of Advanced Development at Blue Canyon Technologies Advanced mission concepts
Attitude Determination and Control Dan Hegel Director, Advanced Development hegel@bluecanyontech.com 1 Dan Hegel - Intro Director of Advanced Development at Blue Canyon Technologies Advanced mission concepts
An Attitude Control System and Commissioning Results of the SNAP-1 Nanosatellite
 An Attitude Control System and Commissioning Results of the SNAP-1 Nanosatellite WH Steyn, Y Hashida and V Lappas Surrey Space Centre University of Surrey Guildford, Surrey GU2 5XH United Kingdom Abstract.
An Attitude Control System and Commissioning Results of the SNAP-1 Nanosatellite WH Steyn, Y Hashida and V Lappas Surrey Space Centre University of Surrey Guildford, Surrey GU2 5XH United Kingdom Abstract.
Quaternion-Based Tracking Control Law Design For Tracking Mode
 A. M. Elbeltagy Egyptian Armed forces Conference on small satellites. 2016 Logan, Utah, USA Paper objectives Introduction Presentation Agenda Spacecraft combined nonlinear model Proposed RW nonlinear attitude
A. M. Elbeltagy Egyptian Armed forces Conference on small satellites. 2016 Logan, Utah, USA Paper objectives Introduction Presentation Agenda Spacecraft combined nonlinear model Proposed RW nonlinear attitude
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
CS491/691: Introduction to Aerial Robotics Topic: Midterm Preparation Dr. Kostas Alexis (CSE) Areas of Focus Coordinate system transformations (CST) MAV Dynamics (MAVD) Navigation Sensors (NS) State Estimation
Lecture Module 2: Spherical Geometry, Various Axes Systems
 1 Lecture Module 2: Spherical Geometry, Various Axes Systems Satellites in space need inertial frame of reference for attitude determination. In a true sense, all bodies in universe are in motion and inertial
1 Lecture Module 2: Spherical Geometry, Various Axes Systems Satellites in space need inertial frame of reference for attitude determination. In a true sense, all bodies in universe are in motion and inertial
Infrared Earth Horizon Sensors for CubeSat Attitude Determination
 Infrared Earth Horizon Sensors for CubeSat Attitude Determination Tam Nguyen Department of Aeronautics and Astronautics Massachusetts Institute of Technology Outline Background and objectives Nadir vector
Infrared Earth Horizon Sensors for CubeSat Attitude Determination Tam Nguyen Department of Aeronautics and Astronautics Massachusetts Institute of Technology Outline Background and objectives Nadir vector
Attitude Determination and Control System Design for STU-2A Cubesat and In-Orbit Results
 13 th Annual Summer CubeSat Developer s Workshop August 6-7, 2016, Logan, Utah Attitude Determination and Control System Design for STU-2A Cubesat and In-Orbit Results Presented by Shufan Wu Guowen Sun,
13 th Annual Summer CubeSat Developer s Workshop August 6-7, 2016, Logan, Utah Attitude Determination and Control System Design for STU-2A Cubesat and In-Orbit Results Presented by Shufan Wu Guowen Sun,
CHAPTER 3 PERFORMANCE
 PERFORMANCE 3.1 Introduction The LM-3B performance figures given in this chapter are based on the following assumptions: Launching from XSLC (Xichang Satellite Launch Center, Sichuan Province, China),
PERFORMANCE 3.1 Introduction The LM-3B performance figures given in this chapter are based on the following assumptions: Launching from XSLC (Xichang Satellite Launch Center, Sichuan Province, China),
ATTITUDE CONTROL MECHANIZATION TO DE-ORBIT SATELLITES USING SOLAR SAILS
 IAA-AAS-DyCoSS2-14-07-02 ATTITUDE CONTROL MECHANIZATION TO DE-ORBIT SATELLITES USING SOLAR SAILS Ozan Tekinalp, * Omer Atas INTRODUCTION Utilization of solar sails for the de-orbiting of satellites is
IAA-AAS-DyCoSS2-14-07-02 ATTITUDE CONTROL MECHANIZATION TO DE-ORBIT SATELLITES USING SOLAR SAILS Ozan Tekinalp, * Omer Atas INTRODUCTION Utilization of solar sails for the de-orbiting of satellites is
Inertial Frame frame-dragging
 Frame Dragging Frame Dragging An Inertial Frame is a frame that is not accelerating (in the sense of proper acceleration that would be detected by an accelerometer). In Einstein s theory of General Relativity
Frame Dragging Frame Dragging An Inertial Frame is a frame that is not accelerating (in the sense of proper acceleration that would be detected by an accelerometer). In Einstein s theory of General Relativity
A Stellar Gyroscope for CubeSat Attitude Determination
 A Stellar Gyroscope for CubeSat Attitude Determination Samir A. Rawashdeh and James E. Lumpp, Jr. Space Systems Laboratory University of Kentucky James Barrington-Brown and Massimiliano Pastena SSBV Space
A Stellar Gyroscope for CubeSat Attitude Determination Samir A. Rawashdeh and James E. Lumpp, Jr. Space Systems Laboratory University of Kentucky James Barrington-Brown and Massimiliano Pastena SSBV Space
Chapter 8 Part 1. Attitude Dynamics: Disturbance Torques AERO-423
 Chapter 8 Part 1 Attitude Dynamics: Disturbance Torques AEO-43 Types of Disturbance Torques Solar Pressure Dominant torque for geosynchronous satellites Gravity Gradient Can be disturbance or control torque
Chapter 8 Part 1 Attitude Dynamics: Disturbance Torques AEO-43 Types of Disturbance Torques Solar Pressure Dominant torque for geosynchronous satellites Gravity Gradient Can be disturbance or control torque
FORMATION FLYING WITH SHEPHERD SATELLITES NIAC Fellows Meeting Michael LaPointe Ohio Aerospace Institute
 FORMATION FLYING WITH SHEPHERD SATELLITES 2001 NIAC Fellows Meeting Michael LaPointe Ohio Aerospace Institute WHAT IS FORMATION FLYING? Two or more satellites flying in prescribed orbits at a fixed separation
FORMATION FLYING WITH SHEPHERD SATELLITES 2001 NIAC Fellows Meeting Michael LaPointe Ohio Aerospace Institute WHAT IS FORMATION FLYING? Two or more satellites flying in prescribed orbits at a fixed separation
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon
 Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Design of Sliding Mode Attitude Control for Communication Spacecraft
 Design of Sliding Mode Attitude Control for Communication Spacecraft Erkan Abdulhamitbilal 1 and Elbrous M. Jafarov 1 ISTAVIA Engineering, Istanbul Aeronautics and Astronautics Engineering, Istanbul Technical
Design of Sliding Mode Attitude Control for Communication Spacecraft Erkan Abdulhamitbilal 1 and Elbrous M. Jafarov 1 ISTAVIA Engineering, Istanbul Aeronautics and Astronautics Engineering, Istanbul Technical
Automatic Control Systems. -Lecture Note 15-
 -Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
-Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING
 FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
A Multi-mode Attitude Determination and Control System for SUNSAT
 A Multi-mode Attitude Determination and Control System for SUNSA Dr. Herman Steyn Department of Electronic Engineering, University of Stellenbosch Stellenbosch 76, South Africa el: +2721-88449, Fax: +2721-884981,
A Multi-mode Attitude Determination and Control System for SUNSA Dr. Herman Steyn Department of Electronic Engineering, University of Stellenbosch Stellenbosch 76, South Africa el: +2721-88449, Fax: +2721-884981,
D-SAT Simplified Magnetic Attitude Control
 D-SAT Simplified Magnetic Attitude Control Warren K. Soh, Norhizam Hamzah, Ahmad Sabirin Arshad Astronautic Technology (M) Sdn. Bhd. (ATSB) Suite G1A, Enterprise 3, Technology Park Malaysia, Bukit Jalil
D-SAT Simplified Magnetic Attitude Control Warren K. Soh, Norhizam Hamzah, Ahmad Sabirin Arshad Astronautic Technology (M) Sdn. Bhd. (ATSB) Suite G1A, Enterprise 3, Technology Park Malaysia, Bukit Jalil
Attitude Determination using Infrared Earth Horizon Sensors
 Attitude Determination using Infrared Earth Horizon Sensors Tam N. T. Nguyen Department of Aeronautics and Astronautics Massachusetts Institute of Technology 28 th Annual AIAA/USU Conference on Small Satellites
Attitude Determination using Infrared Earth Horizon Sensors Tam N. T. Nguyen Department of Aeronautics and Astronautics Massachusetts Institute of Technology 28 th Annual AIAA/USU Conference on Small Satellites
Orbital Environment Simulator
 Orbital Environment Simulator Samir Rawashdeh Space Systems Laboratory University of Kentucky 2009 Summer CubeSat Developers' Workshop August 9, 2009 Overview Introduction Implementation Details Capabilities
Orbital Environment Simulator Samir Rawashdeh Space Systems Laboratory University of Kentucky 2009 Summer CubeSat Developers' Workshop August 9, 2009 Overview Introduction Implementation Details Capabilities
PRELIMINAJ3.:( 6/8/92 SOFTWARE REQUIREMENTS SPECIFICATION FOR THE DSPSE GUIDANCE, NAVIGATION, AND CONTROL CSCI. Prepared by
 PRELIMINAJ3.:( SOFTWARE REQUIREMENTS SPECIFICATION FOR THE DSPSE GUIDANCE, NAVIGATION, AND CONTROL CSCI Prepared by Space Applications Corporation 6/8/92.. 1 SCOPE 1.1 IDENTIFICATION 1.2 OVERVIEW This
PRELIMINAJ3.:( SOFTWARE REQUIREMENTS SPECIFICATION FOR THE DSPSE GUIDANCE, NAVIGATION, AND CONTROL CSCI Prepared by Space Applications Corporation 6/8/92.. 1 SCOPE 1.1 IDENTIFICATION 1.2 OVERVIEW This
Study Participants: T.E. Sarris, E.R. Talaat, A. Papayannis, P. Dietrich, M. Daly, X. Chu, J. Penson, A. Vouldis, V. Antakis, G.
 GLEME: GLOBAL LIDAR EXPLORATION OF THE MESOSPHERE Project Technical Officer: E. Armandillo Study Participants: T.E. Sarris, E.R. Talaat, A. Papayannis, P. Dietrich, M. Daly, X. Chu, J. Penson, A. Vouldis,
GLEME: GLOBAL LIDAR EXPLORATION OF THE MESOSPHERE Project Technical Officer: E. Armandillo Study Participants: T.E. Sarris, E.R. Talaat, A. Papayannis, P. Dietrich, M. Daly, X. Chu, J. Penson, A. Vouldis,
GCOM-C/SGLI and its Lunar Calibration
 GCOM-C/SGLI and its Lunar Calibration Lunar Calibration Workshop December 1-4, 2014 JAXA/GCOM Proj. Yoshihiko Okamura (okamura.yoshihiko@jaxa.jp) 1. Overview of GCOM-C satellite and SGLI (1) Global Change
GCOM-C/SGLI and its Lunar Calibration Lunar Calibration Workshop December 1-4, 2014 JAXA/GCOM Proj. Yoshihiko Okamura (okamura.yoshihiko@jaxa.jp) 1. Overview of GCOM-C satellite and SGLI (1) Global Change
An Inverse Dynamics Attitude Control System with Autonomous Calibration. Sanny Omar Dr. David Beale Dr. JM Wersinger
 An Inverse Dynamics Attitude Control System with Autonomous Calibration Sanny Omar Dr. David Beale Dr. JM Wersinger Outline Attitude Determination and Control Systems (ADACS) Overview Coordinate Frames
An Inverse Dynamics Attitude Control System with Autonomous Calibration Sanny Omar Dr. David Beale Dr. JM Wersinger Outline Attitude Determination and Control Systems (ADACS) Overview Coordinate Frames
Attitude Determination System of Small Satellite
 Attitude Determination System of Small Satellite Satellite Research Centre Jiun Wei Chia, M. Sheral Crescent Tissera and Kay-Soon Low School of EEE, Nanyang Technological University, Singapore 24 th October
Attitude Determination System of Small Satellite Satellite Research Centre Jiun Wei Chia, M. Sheral Crescent Tissera and Kay-Soon Low School of EEE, Nanyang Technological University, Singapore 24 th October
EE565:Mobile Robotics Lecture 6
 EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
EE565:Mobile Robotics Lecture 6 Welcome Dr. Ahmad Kamal Nasir Announcement Mid-Term Examination # 1 (25%) Understand basic wheel robot kinematics, common mobile robot sensors and actuators knowledge. Understand
Constant Orbital Momentum Equilibrium Trajectories of a Gyrostat-Satellite
 Constant Orbital Momentum Equilibrium Trajectories of a Gyrostat-Satellite Matthew Clark VanDyke Dissertation submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial
Constant Orbital Momentum Equilibrium Trajectories of a Gyrostat-Satellite Matthew Clark VanDyke Dissertation submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial
Naoteru Gouda(NAOJ) Taihei Yano (NAOJ) Nano-JASMINE project team
 Taihei Yano (NAOJ) Nano-JASMINE project team") A very small satellite for space astrometry: Nano-JASMINE Yoichi Hatsutori(NAOJ) Naoteru Gouda(NAOJ) Yukiyasu Kobayashi(NAOJ) Taihei Yano (NAOJ) Yoshiyuki Yamada (Kyoto Univ.) Nano-JASMINE project team
A very small satellite for space astrometry: Nano-JASMINE Yoichi Hatsutori(NAOJ) Naoteru Gouda(NAOJ) Yukiyasu Kobayashi(NAOJ) Taihei Yano (NAOJ) Yoshiyuki Yamada (Kyoto Univ.) Nano-JASMINE project team
Lunar Satellite Attitude Determination System
 Lunar Satellite Attitude Determination System SENIOR DESIGN PROPOSAL PRESENTATION TEAM EPOCH KUPOLUYI, TOLULOPE (LEAD DEVELOPER) SONOIKI, OLUWAYEMISI (LEAD RESEARCHER) WARREN, DANAH (PROJECT MANAGER) NOVEMBER
Lunar Satellite Attitude Determination System SENIOR DESIGN PROPOSAL PRESENTATION TEAM EPOCH KUPOLUYI, TOLULOPE (LEAD DEVELOPER) SONOIKI, OLUWAYEMISI (LEAD RESEARCHER) WARREN, DANAH (PROJECT MANAGER) NOVEMBER
An Attitude Control System for a Low-Cost Earth Observation Satellite with Orbit Maintenance Capability
 An Attitude Control System for a Low-Cost Earth Observation Satellite with Orbit Maintenance Capability Willem H Steyn Yoshi Hashida Surrey Space Centre University of Surrey Guildford, Surrey GU2 5XH United
An Attitude Control System for a Low-Cost Earth Observation Satellite with Orbit Maintenance Capability Willem H Steyn Yoshi Hashida Surrey Space Centre University of Surrey Guildford, Surrey GU2 5XH United
Attitude Determination using Infrared Earth Horizon Sensors
 SSC14-VIII-3 Attitude Determination using Infrared Earth Horizon Sensors Tam Nguyen Department of Aeronautics and Astronautics, Massachusetts Institute of Technology 77 Massachusetts Avenue, Cambridge,
SSC14-VIII-3 Attitude Determination using Infrared Earth Horizon Sensors Tam Nguyen Department of Aeronautics and Astronautics, Massachusetts Institute of Technology 77 Massachusetts Avenue, Cambridge,
ONBOARD AUTONOMOUS CORRECTIONS FOR ACCURATE IRF POINTING
 ONBOARD AUTONOMOUS CORRECTIONS FOR ACCURATE IRF POINTING John L. Jørgensen, Maurizio Betto, Peter S. Jørgensen, Troelz Denver Technical University of Denmark, Ørsted.DTU, Dept. of Measurement and Instrumentation
ONBOARD AUTONOMOUS CORRECTIONS FOR ACCURATE IRF POINTING John L. Jørgensen, Maurizio Betto, Peter S. Jørgensen, Troelz Denver Technical University of Denmark, Ørsted.DTU, Dept. of Measurement and Instrumentation
Design and Implementation of a Space Environment Simulation Toolbox for Small Satellites
 56th International Astronautical Congress 25 35th Student Conference (IAF W.) IAC-5-E2.3.6 Design and Implementation of a Space Environment Simulation Toolbox for Small Satellites Rouzbeh Amini, Jesper
56th International Astronautical Congress 25 35th Student Conference (IAF W.) IAC-5-E2.3.6 Design and Implementation of a Space Environment Simulation Toolbox for Small Satellites Rouzbeh Amini, Jesper
Absolute Radiometric Calibration Using a Solar Reflector in Near-Geosynchronous Orbit
 Absolute Radiometric Calibration Using a Solar Reflector in Near-Geosynchronous Orbit Richard J. Rudy, Ray W. Russell, Dan J. Mabry, Andrea M. Gilbert, Paul V. Anderson, David J. Gutierrez (The Aerospace
Absolute Radiometric Calibration Using a Solar Reflector in Near-Geosynchronous Orbit Richard J. Rudy, Ray W. Russell, Dan J. Mabry, Andrea M. Gilbert, Paul V. Anderson, David J. Gutierrez (The Aerospace
GOES-R Instrument Status and Accommodations. Barbara Pfarr GOES-R Program Systems Engineering January 2010 AMS Conference
 GOES-R Instrument Status and Accommodations Barbara Pfarr GOES-R Program Systems Engineering January 2010 AMS Conference Agenda Instrument Developmental Status Significant Changes in the Last Year Introducing
GOES-R Instrument Status and Accommodations Barbara Pfarr GOES-R Program Systems Engineering January 2010 AMS Conference Agenda Instrument Developmental Status Significant Changes in the Last Year Introducing
APPENDIX B SUMMARY OF ORBITAL MECHANICS RELEVANT TO REMOTE SENSING
 APPENDIX B SUMMARY OF ORBITAL MECHANICS RELEVANT TO REMOTE SENSING Orbit selection and sensor characteristics are closely related to the strategy required to achieve the desired results. Different types
APPENDIX B SUMMARY OF ORBITAL MECHANICS RELEVANT TO REMOTE SENSING Orbit selection and sensor characteristics are closely related to the strategy required to achieve the desired results. Different types
Spacecraft Attitude Dynamics and Control. Christopher D. Hall
 Spacecraft Attitude Dynamics and Control Christopher D. Hall January 16, 2000 Contents 1 Introduction 1-1 1.1 Attitude dynamics and control in operations.............. 1-2 1.2 Overview of attitude dynamics
Spacecraft Attitude Dynamics and Control Christopher D. Hall January 16, 2000 Contents 1 Introduction 1-1 1.1 Attitude dynamics and control in operations.............. 1-2 1.2 Overview of attitude dynamics
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM. M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010
 FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
Multi-aperture miniaturized star sensors, modular building blocks for small satellite AOCS systems
 Multi-aperture miniaturized star sensors, modular building blocks for small satellite AOCS systems Jeroen Rotteveel ISIS Innovative Solutions In Space BV Rotterdamseweg 380, 2629HG Delft, The Netherlands;
Multi-aperture miniaturized star sensors, modular building blocks for small satellite AOCS systems Jeroen Rotteveel ISIS Innovative Solutions In Space BV Rotterdamseweg 380, 2629HG Delft, The Netherlands;
Orbit Determination of Satellite Formations. Terry Alfriend 9 th US Russian Space Surveillance Workshop
 Orbit Determination of Satellite Formations Terry Alfriend 9 th US Russian Space Surveillance Workshop Outline What is a Satellite Formation Types of Formations Proposed Approach for Orbit Determination
Orbit Determination of Satellite Formations Terry Alfriend 9 th US Russian Space Surveillance Workshop Outline What is a Satellite Formation Types of Formations Proposed Approach for Orbit Determination
1. (a) Describe the difference between over-expanded, under-expanded and ideallyexpanded
 Describe the difference between over-expanded, under-expanded and ideallyexpanded") Code No: R05322106 Set No. 1 1. (a) Describe the difference between over-expanded, under-expanded and ideallyexpanded rocket nozzles. (b) While on its way into orbit a space shuttle with an initial mass
Code No: R05322106 Set No. 1 1. (a) Describe the difference between over-expanded, under-expanded and ideallyexpanded rocket nozzles. (b) While on its way into orbit a space shuttle with an initial mass
PRATHAM IIT BOMBAY STUDENT SATELLITE. Critical Design Report Attitude Determination and Control System (ADCS) for Pratham
 for Pratham") PRATHAM IIT BOMBAY STUDENT SATELLITE Critical Design Report Attitude Determination and Control System (ADCS) for Pratham Indian Institute of Technology, Bombay 26 June, 2010 Chapter 1 Objectives of ADCS
PRATHAM IIT BOMBAY STUDENT SATELLITE Critical Design Report Attitude Determination and Control System (ADCS) for Pratham Indian Institute of Technology, Bombay 26 June, 2010 Chapter 1 Objectives of ADCS
Learning Lab Seeing the World through Satellites Eyes
 Learning Lab Seeing the World through Satellites Eyes ESSENTIAL QUESTION What is a satellite? Lesson Overview: Engage students will share their prior knowledge about satellites and explore what satellites
Learning Lab Seeing the World through Satellites Eyes ESSENTIAL QUESTION What is a satellite? Lesson Overview: Engage students will share their prior knowledge about satellites and explore what satellites
VELOX-CI: Advanced Application of GPS for Radio Occultation and Satellite Attitude Determination
 VELOX-CI: Advanced Application of GPS for Radio Occultation and Satellite Attitude Determination Yung-Fu Tsai, Guo Xiong Lee and Kay Soon Low Satellite Research Centre (SaRC) School of Electrical and Electronic
VELOX-CI: Advanced Application of GPS for Radio Occultation and Satellite Attitude Determination Yung-Fu Tsai, Guo Xiong Lee and Kay Soon Low Satellite Research Centre (SaRC) School of Electrical and Electronic
Dynamics and Control Functional Division Report
 Dynamics and Control Functional Division Report Jon Chrone Kevin Daugherty Jeremy Davis Kevin Earle Josh Ellis Mark Grigg Bhalvinder Gulati Becky Maiorano Ellen McDorman Josh Michener November 18, 2004
Dynamics and Control Functional Division Report Jon Chrone Kevin Daugherty Jeremy Davis Kevin Earle Josh Ellis Mark Grigg Bhalvinder Gulati Becky Maiorano Ellen McDorman Josh Michener November 18, 2004
The Swarm Vector Field Magnetometer (VFM): instrument commissioning & performance assessment José M. G. Merayo
: instrument commissioning & performance assessment José M. G. Merayo") instrument commissioning & performance assessment José M. G. Merayo DTU Space, Technical University of Denmark Division Measurement & Instrumentation Systems overview Fluxgate principle Amorphous magnetic
instrument commissioning & performance assessment José M. G. Merayo DTU Space, Technical University of Denmark Division Measurement & Instrumentation Systems overview Fluxgate principle Amorphous magnetic
Spacecraft Bus / Platform
 Spacecraft Bus / Platform Propulsion Thrusters ADCS: Attitude Determination and Control Subsystem Shield CDH: Command and Data Handling Subsystem Thermal Payload Power Communication Structure and Mechanisms
Spacecraft Bus / Platform Propulsion Thrusters ADCS: Attitude Determination and Control Subsystem Shield CDH: Command and Data Handling Subsystem Thermal Payload Power Communication Structure and Mechanisms
The Torque Rudder: A Novel Semi-Passive Actuator for Small Spacecraft Attitude Control
 The Torque Rudder: A Novel Semi-Passive Actuator for Small Spacecraft Attitude Control Grant Bonin, Vincent Tarantini, Luke Stras, and Robert E. Zee UTIAS Space Flight Laboratory Toronto, On. Canada M3H
The Torque Rudder: A Novel Semi-Passive Actuator for Small Spacecraft Attitude Control Grant Bonin, Vincent Tarantini, Luke Stras, and Robert E. Zee UTIAS Space Flight Laboratory Toronto, On. Canada M3H
Tracking Rigid Body Motion Using Thrusters and Momentum. Wheels
 JAS 199 Tracking Rigid Body Motion Using Thrusters and Momentum Wheels Christopher D. Hall, Panagiotis Tsiotras, and Haijun Shen Abstract Tracking control laws are developed for a rigid spacecraft using
JAS 199 Tracking Rigid Body Motion Using Thrusters and Momentum Wheels Christopher D. Hall, Panagiotis Tsiotras, and Haijun Shen Abstract Tracking control laws are developed for a rigid spacecraft using
DYNAMIC ANALYSIS OF SPACE TETHER MISSIONS
 DYNAMIC ANALYSIS OF SPACE TETHER MISSIONS Volume 126 ADVANCES IN THE ASTRONAUTICAL SCIENCES by Eu gene M. Levin Published for the American Astronautical Society by Univelt, Incorporated, P.O. Box 28130,
DYNAMIC ANALYSIS OF SPACE TETHER MISSIONS Volume 126 ADVANCES IN THE ASTRONAUTICAL SCIENCES by Eu gene M. Levin Published for the American Astronautical Society by Univelt, Incorporated, P.O. Box 28130,
Space Surveillance using Star Trackers. Part I: Simulations
 AAS 06-231 Space Surveillance using Star Trackers. Part I: Simulations Iohan Ettouati, Daniele Mortari, and Thomas Pollock Texas A&M University, College Station, Texas 77843-3141 Abstract This paper presents
AAS 06-231 Space Surveillance using Star Trackers. Part I: Simulations Iohan Ettouati, Daniele Mortari, and Thomas Pollock Texas A&M University, College Station, Texas 77843-3141 Abstract This paper presents
Tides and Lagrange Points
 Ast111, Lecture 3a Tides and Lagrange Points Arial view of Tidal surge in Alaska (S. Sharnoff) Tides Tidal disruption Lagrange Points Tadpole Orbits and Trojans Tidal Bulges Tides Tidal Force The force
Ast111, Lecture 3a Tides and Lagrange Points Arial view of Tidal surge in Alaska (S. Sharnoff) Tides Tidal disruption Lagrange Points Tadpole Orbits and Trojans Tidal Bulges Tides Tidal Force The force
AA 528 Spacecraft Dynamics and Control. Mehran Mesbahi Aeronautics & Astronautics Winter 2017 University of Washington
 AA 528 Spacecraft Dynamics and Control Mehran Mesbahi Aeronautics & Astronautics Winter 2017 University of Washington Spacecraft dynamics and control What is this class all about? what is in the name?
AA 528 Spacecraft Dynamics and Control Mehran Mesbahi Aeronautics & Astronautics Winter 2017 University of Washington Spacecraft dynamics and control What is this class all about? what is in the name?
Hysteresis Nutation Damper for Spin Satellite
 Hysteresis Nutation Damper for Spin Satellite Hamed Shahmohamadi Ousaloo * Send Orders for Reprints to reprints@benthamscience.net The Open Aerospace Engineering Journal, 2013, 6, 1-5 1 Open Access Space
Hysteresis Nutation Damper for Spin Satellite Hamed Shahmohamadi Ousaloo * Send Orders for Reprints to reprints@benthamscience.net The Open Aerospace Engineering Journal, 2013, 6, 1-5 1 Open Access Space
CHAPTER 3 PERFORMANCE
 PERFORMANCE The launch performance given in this chapter is based on the following assumptions: The LV system parameters being all nominal values; Mass of the LV adapter and the separation system are included
PERFORMANCE The launch performance given in this chapter is based on the following assumptions: The LV system parameters being all nominal values; Mass of the LV adapter and the separation system are included
Physics 106a, Caltech 4 December, Lecture 18: Examples on Rigid Body Dynamics. Rotating rectangle. Heavy symmetric top
 Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
THE DYNAMIC TEST EQUIPMENT FOR THE STAR TRACKERS PROCESSING
 THE DYNAMIC TEST EQUIPMENT FOR THE STAR TRACKERS PROCESSING ABSTRACT Sergey Voronkov Space Research Institute, Russian Academy of Sciences, 117997, Profsoyuznaya str., 84/32, Moscow, Russia Phone: +7 095
THE DYNAMIC TEST EQUIPMENT FOR THE STAR TRACKERS PROCESSING ABSTRACT Sergey Voronkov Space Research Institute, Russian Academy of Sciences, 117997, Profsoyuznaya str., 84/32, Moscow, Russia Phone: +7 095
Structure and algorithms of motion control system's software of the small spacecraft
 Structure and algorithms of motion control system's software of the small spacecraft Filatov A.V., Progress Space Rocket Centre, Samara Tkachenko I.S., Tyugashev A.A., Sopchenko E.V. Samara State Aerospace
Structure and algorithms of motion control system's software of the small spacecraft Filatov A.V., Progress Space Rocket Centre, Samara Tkachenko I.S., Tyugashev A.A., Sopchenko E.V. Samara State Aerospace
Fundamentals of attitude Estimation
 Fundamentals of attitude Estimation Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Basically an IMU can used for two
Fundamentals of attitude Estimation Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai Basically an IMU can used for two
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E S 8-9 Part B, Lectures 8-9 23 March, 2017 C O N T E N T S In this lecture, we will look at factors that cause an orbit to change over time orbital
AS3010: Introduction to Space Technology L E C T U R E S 8-9 Part B, Lectures 8-9 23 March, 2017 C O N T E N T S In this lecture, we will look at factors that cause an orbit to change over time orbital
INVESTIGATION OF PULSED PLASMA THRUSTERS FOR SPACECRAFT ATTITUDE CONTROL
 IEPC-97-128 813 INVESTIGATION OF PULSED PLASMA THRUSTERS FOR SPACECRAFT ATTITUDE CONTROL N.J. Meckel, R.J. Cassady, R.D. Osborne, W.A. Hoskins, R.M. Myers PRIMEX Aerospace Company Redmond, WA. ABSTRACT
IEPC-97-128 813 INVESTIGATION OF PULSED PLASMA THRUSTERS FOR SPACECRAFT ATTITUDE CONTROL N.J. Meckel, R.J. Cassady, R.D. Osborne, W.A. Hoskins, R.M. Myers PRIMEX Aerospace Company Redmond, WA. ABSTRACT
Exploring the Mysteries of the Cosmos on the MOST Microsatellite Mission
 Exploring the Mysteries of the Cosmos on the MOST Microsatellite Mission Dr. Simon Grocott Dr. Robert E Zee Dr. Jaymie Matthews Dynacon Inc UTIAS SFL UBC 13 August 2003 Outline MOST (Microvariability and
Exploring the Mysteries of the Cosmos on the MOST Microsatellite Mission Dr. Simon Grocott Dr. Robert E Zee Dr. Jaymie Matthews Dynacon Inc UTIAS SFL UBC 13 August 2003 Outline MOST (Microvariability and
Jitter and Basic Requirements of the Reaction Wheel Assembly in the Attitude Control System
 Jitter and Basic Requirements of the Reaction Wheel Assembly in the Attitude Control System Lulu Liu August, 7 1 Brief Introduction Photometric precision is a major concern in this space mission. A pointing
Jitter and Basic Requirements of the Reaction Wheel Assembly in the Attitude Control System Lulu Liu August, 7 1 Brief Introduction Photometric precision is a major concern in this space mission. A pointing
Spacecraft Attitude Dynamics for Undergraduates
 Session 1123 Spacecraft Attitude Dynamics for Undergraduates Dr. Rachel Shinn Embry Riddle Aeronautical University, Prescott, AZ Abstract Teaching spacecraft attitude dynamics to undergraduate students
Session 1123 Spacecraft Attitude Dynamics for Undergraduates Dr. Rachel Shinn Embry Riddle Aeronautical University, Prescott, AZ Abstract Teaching spacecraft attitude dynamics to undergraduate students
LOCAL VERTICAL/LOCAL HORIZONTAL ATTITUDE CONTROL FOR SPARTAN SPACECRAFT. James R. Morrissey C. T. A. Incorporated Beltsville, Maryland, USA 20705
 Abstract LOCAL VERTCAL/LOCAL HORZONTAL ATTTUDE CONTROL FOR SPARTAN SPACECRAFT A Spartan spacecraft attitude control system was reconfigured to provide attitude pointing with respect to a Local VerticallLocal
Abstract LOCAL VERTCAL/LOCAL HORZONTAL ATTTUDE CONTROL FOR SPARTAN SPACECRAFT A Spartan spacecraft attitude control system was reconfigured to provide attitude pointing with respect to a Local VerticallLocal
Tools of Astronomy Tools of Astronomy
 Tools of Astronomy Tools of Astronomy The light that comes to Earth from distant objects is the best tool that astronomers can use to learn about the universe. In most cases, there is no other way to study
Tools of Astronomy Tools of Astronomy The light that comes to Earth from distant objects is the best tool that astronomers can use to learn about the universe. In most cases, there is no other way to study
OTSUKIMI Moon-sighting Satellite Kyushu Institute of Technology. 3 rd Mission Idea Contest UNISEC Global
 OTSUKIMI Moon-sighting Satellite Kyushu Institute of Technology 3 rd Mission Idea Contest UNISEC Global The Idea We want to take image for the moon phases as seen from Earth Why? Introduction 1.6 billion,23.4%
OTSUKIMI Moon-sighting Satellite Kyushu Institute of Technology 3 rd Mission Idea Contest UNISEC Global The Idea We want to take image for the moon phases as seen from Earth Why? Introduction 1.6 billion,23.4%
T. Matsuo (NAOJ) ISS dimension ~ football stadium ISS mass ~ Jumbo jet ISS space = 1.5 x Jumbo jet. 90 min per orbit
 ISS dimension ~ football stadium ISS mass ~ Jumbo jet ISS space = 1.5 x Jumbo jet. 90 min per orbit") ISS/JEM M. Tamura T. Matsuo (NAOJ) ISS dimension ~ football stadium ISS mass ~ Jumbo jet ISS space = 1.5 x Jumbo jet ISS orbit ~ 400 km above ground 90 min per orbit Japanese Experiment Module (JEM):"KIBO
ISS/JEM M. Tamura T. Matsuo (NAOJ) ISS dimension ~ football stadium ISS mass ~ Jumbo jet ISS space = 1.5 x Jumbo jet ISS orbit ~ 400 km above ground 90 min per orbit Japanese Experiment Module (JEM):"KIBO
Laser de-spin maneuver for an active debris removal mission - a realistic scenario for Envisat
 Laser de-spin maneuver for an active debris removal mission - a realistic scenario for Envisat Daniel Kucharski Space Environment Research Centre, Mt Stromlo Observatory, Weston Creek ACT, 2611, AUSTRALIA
Laser de-spin maneuver for an active debris removal mission - a realistic scenario for Envisat Daniel Kucharski Space Environment Research Centre, Mt Stromlo Observatory, Weston Creek ACT, 2611, AUSTRALIA
Precision Attitude and Translation Control Design and Optimization
 Precision Attitude and Translation Control Design and Optimization John Mester and Saps Buchman Hansen Experimental Physics Laboratory, Stanford University, Stanford, California, U.S.A. Abstract Future
Precision Attitude and Translation Control Design and Optimization John Mester and Saps Buchman Hansen Experimental Physics Laboratory, Stanford University, Stanford, California, U.S.A. Abstract Future
ENAE483: Principles of Space System Design Power Propulsion Thermal System
 Power Propulsion Thermal System Team B4: Ben Abresch Jason Burr Kevin Lee Scott Wingate November 8th, 2012 Presentation Overview Mission Guidelines Project Specifications Initial Design Power Thermal Insulation
Power Propulsion Thermal System Team B4: Ben Abresch Jason Burr Kevin Lee Scott Wingate November 8th, 2012 Presentation Overview Mission Guidelines Project Specifications Initial Design Power Thermal Insulation
Ay 1 Lecture 2. Starting the Exploration
 Ay 1 Lecture 2 Starting the Exploration 2.1 Distances and Scales Some Commonly Used Units Distance: Astronomical unit: the distance from the Earth to the Sun, 1 au = 1.496 10 13 cm ~ 1.5 10 13 cm Light
Ay 1 Lecture 2 Starting the Exploration 2.1 Distances and Scales Some Commonly Used Units Distance: Astronomical unit: the distance from the Earth to the Sun, 1 au = 1.496 10 13 cm ~ 1.5 10 13 cm Light