A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators
|
|
|
- Roderick Gaines
- 5 years ago
- Views:
Transcription


1 des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica Università di Roma La Sapienza currently on leave at Institute of Robotics and Mechatronics DLR Oberpfaffenhofen
2 Outline FDI problems Robot dynamics and physical properties Detection and isolation of actuator faults Adaptive scheme for actuator FDI Collision detection and reaction Extension to robots with joint elasticity collision detection/reaction + motor friction compensation Conclusions
3 FDI problems Fault Detection recognizing that a fault is affecting a dynamic system Fault Isolation discriminating the occurrence of a fault f from that of all other considered possible faults and disturbances FDI solution approach (model-based) design a residual generator system whose output is only affected by the fault f to be detected and isolated is not affected by any other fault or disturbance converges (asymptotically) to zero whenever f = 0
4 Robot dynamic models fully rigid case presence of transmission/joint elasticity
5 Relevant physical properties kinetic and potential energy relation between inertia and velocity terms
6 Relevant physical properties (cont d) total energy and its variation generalized momenta and their decoupled dynamics
7 Robot actuators FDI faulted model commanded torque fault types fault torque total failure power loss saturation bias possibly concurrent, intermittent, incipient, abrupt,
8 Basic assumptions full state measurements implementation with available sensors (typically, position only) robot dynamic model accurately known adaptation might be included for uncertain parameters use of detection thresholds to handle noise (false alarms) only commanded torque available (no fault model is needed) any control input law open or closed-loop, linear or nonlinear model-based feedback no need of a specified reference motion
9 Early solutions 1. : compare computed model-based torque (from measures) with commanded one 2. : compare simulated acceleration (inverse robot dynamics) with those from measurements
10 and their limitations noisy acceleration (e.g., from double numerical differentiation of position measures) inversion of inertia matrix intrinsic delay (one or more digital steps) dependence on commanded input dynamics poor or no fault isolation (only detection)
11 Energy-based fault detection scalar detector and its dynamics (needed only for analysis)
12 Momentum-based FDI vector of residuals and its decoupled dynamics (a stable first-order linear filter)
 1st")

13 Experimental setup Quanser Pendubot 2nd link (passive) 1st link (actuated) ABB, Ladenburg, Germany video swing-up Pendubot 25 January 2006
14 Actuator FDI on Pendubot partially concurrent 10% power loss on actuator 1 and total failure on (missing) actuator 2 PID control on first joint to 30 commanded torques joint 1 joint 2 joint positions

15 Actuator FDI on Pendubot (cont d) thresholding and dynamic filtering of residuals residuals filtered residuals joint 1 joint 2
16 An adaptive FDI scheme include friction (difficult to estimate) in the model linear parametrization (may be extended to gravity and inertia-related terms)
17 Adapt and detect using an estimate of friction parameters residual dynamics
18 Adapt and detect (cont d) stability analysis via standard Lyapunov and LaSalle techniques (in absence of faults) parameter estimates converge to constant values (= correct ones for sufficient excitation) by overparametrization and suitable gain scaling, one may still adapt also during faults
19 Adaptive actuator FDI on Pendubot situation as before, with power loss increased to 50% on actuator 1 on-line adaptation of both friction and gravity parameters commanded torques joint 1 joint 2 residuals
20 Collision as a fault rigid robot model use only proprioceptive sensors possible contact at any point along the arm simplifying assumptions single contact robot as open kinematic chain unfaulted actuators transpose of contact point Jacobian
21 Analysis of collisions y 2 x 2 y 0 y 1 F K F K q 2 x 1 d 2 d 1 q 1 x 0
22 Collision detection as before, scalar detector only contact forces (wrenches) that perform work on contact velocity (twists) can be detected
23 Directional detection and isolation as before, vector of residuals ideal situation (no noise) collision point is located up to link i
24 Choice of residual gains evaluation by simulation on 7-dof DLR-III arm (impact on last link) joint /s joint /s 10 ms
25 Collision reaction strategies normal operation in zero-gravity once collision is detected ( above threshold) either stop the robot (braking) and then possibly reverse commanded motion (backtracking) or apply a reflex strategy with torque control using directional information of residual vector (move in the same direction of sensed force)
26 Dissipating energy when contact is lost, the residual decays until dissipate kinetic energy at highest rate (using maximum available torque) until robot stops
27 Operative robot states collision = 0 normal operation in zero-gravity collision = 1 residual > low reflex reaction velocity = 0 energy dissipation residual low velocity 0

28 Robots with elastic joints (EJ) harmonic drives introduce joint elasticity effects motor friction and possible arm collisions DLR-III arm: motor position and joint torque sensors
29 Multiple detection for EJ robots it is simultaneously possible to compensate friction (a fault) on motor side detect collision at link side 1. unmodeled motor friction detection and compensation (based on motor generalized momenta) decentralized linear observer (includes acceleration estimation) motor friction compensation
30 Multiple detection for EJ robots (cont d) 2. collision detection: several alternatives are possible for generalizing the rigid case analysis, the most simple is replace joint to motor torque robot control laws should be modified (e.g., in DLR-III arm) reflex strategies to contact detection include torque mode reaction admittance mode reaction
31 DLR-III robot controller motor inertia reduction based on joint torque sensing leads to with general position/torque control law (depending on reference and gain values) obtaining a full state feedback law static gravity compensation (based on motor position)
32 Reflex strategies strategy 2: free-floating torque mode strategy 3: torque control mode strategy 4: admittance control mode
 Head Injury Criterion")

33 Experiments on DLR-III arm (1) Head Injury Criterion (HIC) tests on dummy head 3D accelerometer on dummy head
34 Results on dummy head impact approaching at 30 /s with each joint residual gains = diag{25} joint torque joint 1 residual 0/1 detection acceleration 2 ms
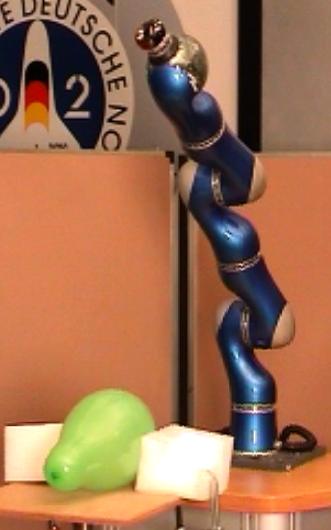




35 Experiments on DLR-III arm (2) strategy /s one of 99 luftballons ABB, Ladenburg, Germany 25 January 2006
36 Results on balloon impact residual & velocity on joint 4 for different reaction strategies no reaction impact at 10 /s with coordinated joint motion
37 Results on balloon impact (cont d) residual & velocity on joint 4 for different reaction strategies impact at 100 /s with coordinated joint motion

38 Human-robot interaction (1) first /sec video HRI - 1 strategy 4: admittance control based on residuals
39 Human-robot interaction (2) first /sec video HRI - 2 strategy 3: torque control based on residuals
40 Human-robot interaction (3) first /sec video HRI - 3 strategy 3: torque control based on residuals
41 Conclusions powerful FDI technique for mechanical systems based on physical quantities (energy, momenta) direct extensions to joint elasticity, actuator dynamics, friction compensation, adaptation to uncertain parameters special case of a more general geometric theory valid for sensor/actuator faults of nonlinear (affine) plants under possible concurrency, exact FDI for a maximum number of faults = N (# of generalized coordinates) principle feasible also for industrial robots, for advanced safety requirements in human-robot physical interaction
42 Acknowledgments scientific contributions by Raffaella Mattone (DIS, Roma) Giulio Milighetti (ex DIS, Roma; now Fraunhofer IITB, Karlsruhe) Alin Albu-Schäffer (DLR, Oberpfaffenhofen) Sami Haddadin (DLR, Oberpfaffenhofen) work supported by Humboldt-Helmholtz Association (2005 Research Award for foreign scientists)
43 References De Luca, Mattone: Actuator FDI using generalized momenta, ICRA 03 De Luca, Mattone: Adapt-and-detect robot actuator faults, ICRA 04 De Luca, Mattone: Identification of robot actuator faults, IROS 05 De Luca, Mattone: Sensorless robot collision detection and hybrid force/motion control, ICRA 05 Mattone, De Luca: FDI in Euler-Lagrange mechanical systems, ASME JDSMC (submitted), May 2005 Mattone, De Luca: Relaxed FDI for nonlinear systems, Automatica, 2006 Albu-Schäffer, De Luca, Haddadin, Hirzinger: Collision detection and reaction strategies with DLR-III arm, IROS 06 (to be submitted)
IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
 Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Design and Control of Compliant Humanoids. Alin Albu-Schäffer. DLR German Aerospace Center Institute of Robotics and Mechatronics
 Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
Stiffness estimation for flexible transmissions
 SICURA@SIDRA 2010 13 Settembre L Aquila Stiffness estimation for flexible transmissions Fabrizio Flacco Alessandro De Luca Dipartimento di Informatica e Sistemistica Motivation Why we need to know the
SICURA@SIDRA 2010 13 Settembre L Aquila Stiffness estimation for flexible transmissions Fabrizio Flacco Alessandro De Luca Dipartimento di Informatica e Sistemistica Motivation Why we need to know the
Lecture «Robot Dynamics»: Dynamics and Control
 Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Dynamics 2
 Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Adaptive Robust Tracking Control of Robot Manipulators in the Task-space under Uncertainties
 Australian Journal of Basic and Applied Sciences, 3(1): 308-322, 2009 ISSN 1991-8178 Adaptive Robust Tracking Control of Robot Manipulators in the Task-space under Uncertainties M.R.Soltanpour, M.M.Fateh
Australian Journal of Basic and Applied Sciences, 3(1): 308-322, 2009 ISSN 1991-8178 Adaptive Robust Tracking Control of Robot Manipulators in the Task-space under Uncertainties M.R.Soltanpour, M.M.Fateh
Robots with Elastic Joints: Modeling and Control
 Scuola di Dottorato CIRA Controllo di Sistemi Robotici per la Manipolazione e la Cooperazione Bertinoro (FC), 14 16 Luglio 2003 Robots with Elastic Joints: Modeling and Control Alessandro De Luca Dipartimento
Scuola di Dottorato CIRA Controllo di Sistemi Robotici per la Manipolazione e la Cooperazione Bertinoro (FC), 14 16 Luglio 2003 Robots with Elastic Joints: Modeling and Control Alessandro De Luca Dipartimento
Video 8.1 Vijay Kumar. Property of University of Pennsylvania, Vijay Kumar
 Video 8.1 Vijay Kumar 1 Definitions State State equations Equilibrium 2 Stability Stable Unstable Neutrally (Critically) Stable 3 Stability Translate the origin to x e x(t) =0 is stable (Lyapunov stable)
Video 8.1 Vijay Kumar 1 Definitions State State equations Equilibrium 2 Stability Stable Unstable Neutrally (Critically) Stable 3 Stability Translate the origin to x e x(t) =0 is stable (Lyapunov stable)
Robot Manipulator Control. Hesheng Wang Dept. of Automation
 Robot Manipulator Control Hesheng Wang Dept. of Automation Introduction Industrial robots work based on the teaching/playback scheme Operators teach the task procedure to a robot he robot plays back eecute
Robot Manipulator Control Hesheng Wang Dept. of Automation Introduction Industrial robots work based on the teaching/playback scheme Operators teach the task procedure to a robot he robot plays back eecute
Application of Adaptive Thresholds in Robust Fault Detection of an Electro- Mechanical Single-Wheel Steering Actuator
 Preprints of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes (SAFEPROCESS) August 29-31, 212. Mexico City, Mexico Application of Adaptive Thresholds in Robust Fault
Preprints of the 8th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes (SAFEPROCESS) August 29-31, 212. Mexico City, Mexico Application of Adaptive Thresholds in Robust Fault
Contact Distinction in Human-Robot Cooperation with Admittance Control
 Contact Distinction in Human-Robot Cooperation with Admittance Control Alexandros Kouris, Fotios Dimeas and Nikos Aspragathos Robotics Group, Dept. of Mechanical Engineering & Aeronautics University of
Contact Distinction in Human-Robot Cooperation with Admittance Control Alexandros Kouris, Fotios Dimeas and Nikos Aspragathos Robotics Group, Dept. of Mechanical Engineering & Aeronautics University of
Soft Robotics for the Hydraulic Atlas Arms: Joint Impedance Control with Collision Detection and Disturbance Compensation
 This is the author's version of an article that has been published in the IROS 216 proceedings. The final version of record is available at http://dx.doi.org/1.119/iros.216.7759517 Soft Robotics for the
This is the author's version of an article that has been published in the IROS 216 proceedings. The final version of record is available at http://dx.doi.org/1.119/iros.216.7759517 Soft Robotics for the
Robot Dynamics II: Trajectories & Motion
 Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Neural Network Control of Robot Manipulators and Nonlinear Systems
 Neural Network Control of Robot Manipulators and Nonlinear Systems F.L. LEWIS Automation and Robotics Research Institute The University of Texas at Arlington S. JAG ANNATHAN Systems and Controls Research
Neural Network Control of Robot Manipulators and Nonlinear Systems F.L. LEWIS Automation and Robotics Research Institute The University of Texas at Arlington S. JAG ANNATHAN Systems and Controls Research
A SIMPLE ITERATIVE SCHEME FOR LEARNING GRAVITY COMPENSATION IN ROBOT ARMS
 A SIMPLE ITERATIVE SCHEME FOR LEARNING GRAVITY COMPENSATION IN ROBOT ARMS A. DE LUCA, S. PANZIERI Dipartimento di Informatica e Sistemistica Università degli Studi di Roma La Sapienza ABSTRACT The set-point
A SIMPLE ITERATIVE SCHEME FOR LEARNING GRAVITY COMPENSATION IN ROBOT ARMS A. DE LUCA, S. PANZIERI Dipartimento di Informatica e Sistemistica Università degli Studi di Roma La Sapienza ABSTRACT The set-point
Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and Positioning Accuracy of a Robot Arm
 1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
DYNAMICS OF SERIAL ROBOTIC MANIPULATORS
 DYNAMICS OF SERIAL ROBOTIC MANIPULATORS NOMENCLATURE AND BASIC DEFINITION We consider here a mechanical system composed of r rigid bodies and denote: M i 6x6 inertia dyads of the ith body. Wi 6 x 6 angular-velocity
DYNAMICS OF SERIAL ROBOTIC MANIPULATORS NOMENCLATURE AND BASIC DEFINITION We consider here a mechanical system composed of r rigid bodies and denote: M i 6x6 inertia dyads of the ith body. Wi 6 x 6 angular-velocity
Balancing of an Inverted Pendulum with a SCARA Robot
 Balancing of an Inverted Pendulum with a SCARA Robot Bernhard Sprenger, Ladislav Kucera, and Safer Mourad Swiss Federal Institute of Technology Zurich (ETHZ Institute of Robotics 89 Zurich, Switzerland
Balancing of an Inverted Pendulum with a SCARA Robot Bernhard Sprenger, Ladislav Kucera, and Safer Mourad Swiss Federal Institute of Technology Zurich (ETHZ Institute of Robotics 89 Zurich, Switzerland
ARTISAN ( ) ARTISAN ( ) Human-Friendly Robot Design
 ARTISAN ( ) Human-Friendly Robot Design") Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION
 COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
Toward Torque Control of a KUKA LBR IIWA for Physical Human-Robot Interaction
 Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
q 1 F m d p q 2 Figure 1: An automated crane with the relevant kinematic and dynamic definitions.
 Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
The skeleton algorithm for self-collision avoidance of a humanoid manipulator
 The skeleton algorithm for self-collision avoidance of a humanoid manipulator Agostino De Santis, Alin Albu Schäffer, Christian Ott, Bruno Siciliano, and Gerd Hirzinger Abstract For use in unstructured
The skeleton algorithm for self-collision avoidance of a humanoid manipulator Agostino De Santis, Alin Albu Schäffer, Christian Ott, Bruno Siciliano, and Gerd Hirzinger Abstract For use in unstructured
Modelling and Control of Variable Stiffness Actuated Robots
 Modelling and Control of Variable Stiffness Actuated Robots Sabira Jamaludheen 1, Roshin R 2 P.G. Student, Department of Electrical and Electronics Engineering, MES College of Engineering, Kuttippuram,
Modelling and Control of Variable Stiffness Actuated Robots Sabira Jamaludheen 1, Roshin R 2 P.G. Student, Department of Electrical and Electronics Engineering, MES College of Engineering, Kuttippuram,
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM. M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010
 FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
Robust Control of Cooperative Underactuated Manipulators
 Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Virtual Passive Controller for Robot Systems Using Joint Torque Sensors
 NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
Robotics 2 Robot Interaction with the Environment
 Robotics 2 Robot Interaction with the Environment Prof. Alessandro De Luca Robot-environment interaction a robot (end-effector) may interact with the environment! modifying the state of the environment
Robotics 2 Robot Interaction with the Environment Prof. Alessandro De Luca Robot-environment interaction a robot (end-effector) may interact with the environment! modifying the state of the environment
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING. Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582
 NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING NMT EE 589 & UNM ME 482/582 Simplified drive train model of a robot joint Inertia seen by the motor Link k 1 I I D ( q) k mk 2 kk Gk Torque amplification G
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING NMT EE 589 & UNM ME 482/582 Simplified drive train model of a robot joint Inertia seen by the motor Link k 1 I I D ( q) k mk 2 kk Gk Torque amplification G
Stable Limit Cycle Generation for Underactuated Mechanical Systems, Application: Inertia Wheel Inverted Pendulum
 Stable Limit Cycle Generation for Underactuated Mechanical Systems, Application: Inertia Wheel Inverted Pendulum Sébastien Andary Ahmed Chemori Sébastien Krut LIRMM, Univ. Montpellier - CNRS, 6, rue Ada
Stable Limit Cycle Generation for Underactuated Mechanical Systems, Application: Inertia Wheel Inverted Pendulum Sébastien Andary Ahmed Chemori Sébastien Krut LIRMM, Univ. Montpellier - CNRS, 6, rue Ada
Design and Control of Variable Stiffness Actuation Systems
 Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
ADAPTIVE FORCE AND MOTION CONTROL OF ROBOT MANIPULATORS IN CONSTRAINED MOTION WITH DISTURBANCES
 ADAPTIVE FORCE AND MOTION CONTROL OF ROBOT MANIPULATORS IN CONSTRAINED MOTION WITH DISTURBANCES By YUNG-SHENG CHANG A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
ADAPTIVE FORCE AND MOTION CONTROL OF ROBOT MANIPULATORS IN CONSTRAINED MOTION WITH DISTURBANCES By YUNG-SHENG CHANG A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
Collision Safety for Physical Human-Robot Collaboration
 Collision Safety for Physical Human-Robot Collaboration IROS 2015 Workshop Physical Human-Robot Collaboration Jae-Bok Song School of Mechanical Engineering Korea University Seoul, Korea Outline 2 Human-Robot
Collision Safety for Physical Human-Robot Collaboration IROS 2015 Workshop Physical Human-Robot Collaboration Jae-Bok Song School of Mechanical Engineering Korea University Seoul, Korea Outline 2 Human-Robot
Passivity-based Control of Euler-Lagrange Systems
 Romeo Ortega, Antonio Loria, Per Johan Nicklasson and Hebertt Sira-Ramfrez Passivity-based Control of Euler-Lagrange Systems Mechanical, Electrical and Electromechanical Applications Springer Contents
Romeo Ortega, Antonio Loria, Per Johan Nicklasson and Hebertt Sira-Ramfrez Passivity-based Control of Euler-Lagrange Systems Mechanical, Electrical and Electromechanical Applications Springer Contents
Exponential Controller for Robot Manipulators
 Exponential Controller for Robot Manipulators Fernando Reyes Benemérita Universidad Autónoma de Puebla Grupo de Robótica de la Facultad de Ciencias de la Electrónica Apartado Postal 542, Puebla 7200, México
Exponential Controller for Robot Manipulators Fernando Reyes Benemérita Universidad Autónoma de Puebla Grupo de Robótica de la Facultad de Ciencias de la Electrónica Apartado Postal 542, Puebla 7200, México
Robust Fault Detection and Isolation using Bond Graph for an Active-Passive Variable Serial Elastic Actuator
 Robust Fault Detection and Isolation using Bond Graph for an Active-Passive Variable Serial Elastic Actuator P.J. Cheng Department of Mechanical Engineering National Taiwan University Taipei, 10617, Taiwan
Robust Fault Detection and Isolation using Bond Graph for an Active-Passive Variable Serial Elastic Actuator P.J. Cheng Department of Mechanical Engineering National Taiwan University Taipei, 10617, Taiwan
A time-delayed observer for fault detection and isolation in
 Robotica (6) volume 4, pp. 557 565. 6 Cambridge University Press doi:.7/s635747564 Printed in the United Kingdom A time-delayed observer for fault detection and isolation in industrial robots F. Caccavale,
Robotica (6) volume 4, pp. 557 565. 6 Cambridge University Press doi:.7/s635747564 Printed in the United Kingdom A time-delayed observer for fault detection and isolation in industrial robots F. Caccavale,
Dynamic model of robots:
 Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL
 GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints
 Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
Dynamics. Basilio Bona. Semester 1, DAUIN Politecnico di Torino. B. Bona (DAUIN) Dynamics Semester 1, / 18
 Dynamics Semester 1, / 18") Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Dynamics Basilio Bona DAUIN Politecnico di Torino Semester 1, 2016-17 B. Bona (DAUIN) Dynamics Semester 1, 2016-17 1 / 18 Dynamics Dynamics studies the relations between the 3D space generalized forces
Decoupling Identification with Closed-loop-controlled Elements for Two-link Arm with Elastic Joints
 Preprints of the 9th International Symposium on Robot Control (SYROCO'9) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-2, 29 Decoupling Identification
Preprints of the 9th International Symposium on Robot Control (SYROCO'9) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-2, 29 Decoupling Identification
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Integration of an Active Brake Pedal Simulator in the CarMaker Environment for Design and Evaluation of Haptic Driver Assistance Systems
 Integration of an Active Brake Pedal Simulator in the CarMaker Environment for Design and Evaluation of Haptic Driver Assistance Systems IPG apply & innovate 2014, September 23/24 Simon Rothfuss, Michael
Integration of an Active Brake Pedal Simulator in the CarMaker Environment for Design and Evaluation of Haptic Driver Assistance Systems IPG apply & innovate 2014, September 23/24 Simon Rothfuss, Michael
Nonlinear PD Controllers with Gravity Compensation for Robot Manipulators
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 4, No Sofia 04 Print ISSN: 3-970; Online ISSN: 34-408 DOI: 0.478/cait-04-00 Nonlinear PD Controllers with Gravity Compensation
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 4, No Sofia 04 Print ISSN: 3-970; Online ISSN: 34-408 DOI: 0.478/cait-04-00 Nonlinear PD Controllers with Gravity Compensation
Introduction to centralized control
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task
Dynamic model of robots:
 Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
General procedure for formulation of robot dynamics STEP 1 STEP 3. Module 9 : Robot Dynamics & controls
 Module 9 : Robot Dynamics & controls Lecture 32 : General procedure for dynamics equation forming and introduction to control Objectives In this course you will learn the following Lagrangian Formulation
Module 9 : Robot Dynamics & controls Lecture 32 : General procedure for dynamics equation forming and introduction to control Objectives In this course you will learn the following Lagrangian Formulation
q HYBRID CONTROL FOR BALANCE 0.5 Position: q (radian) q Time: t (seconds) q1 err (radian)
 q Time: t (seconds) q1 err (radian)") Hybrid Control for the Pendubot Mingjun Zhang and Tzyh-Jong Tarn Department of Systems Science and Mathematics Washington University in St. Louis, MO, USA mjz@zach.wustl.edu and tarn@wurobot.wustl.edu
Hybrid Control for the Pendubot Mingjun Zhang and Tzyh-Jong Tarn Department of Systems Science and Mathematics Washington University in St. Louis, MO, USA mjz@zach.wustl.edu and tarn@wurobot.wustl.edu
Gain Scheduling Control with Multi-loop PID for 2-DOF Arm Robot Trajectory Control
 Gain Scheduling Control with Multi-loop PID for 2-DOF Arm Robot Trajectory Control Khaled M. Helal, 2 Mostafa R.A. Atia, 3 Mohamed I. Abu El-Sebah, 2 Mechanical Engineering Department ARAB ACADEMY FOR
Gain Scheduling Control with Multi-loop PID for 2-DOF Arm Robot Trajectory Control Khaled M. Helal, 2 Mostafa R.A. Atia, 3 Mohamed I. Abu El-Sebah, 2 Mechanical Engineering Department ARAB ACADEMY FOR
Neural Networks Lecture 10: Fault Detection and Isolation (FDI) Using Neural Networks
 Using Neural Networks") Neural Networks Lecture 10: Fault Detection and Isolation (FDI) Using Neural Networks H.A. Talebi Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2011.
Neural Networks Lecture 10: Fault Detection and Isolation (FDI) Using Neural Networks H.A. Talebi Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2011.
Underactuated Manipulators: Control Properties and Techniques
 Final version to appear in Machine Intelligence and Robotic Control May 3 Underactuated Manipulators: Control Properties and Techniques Alessandro De Luca Stefano Iannitti Raffaella Mattone Giuseppe Oriolo
Final version to appear in Machine Intelligence and Robotic Control May 3 Underactuated Manipulators: Control Properties and Techniques Alessandro De Luca Stefano Iannitti Raffaella Mattone Giuseppe Oriolo
A DAE approach to Feedforward Control of Flexible Manipulators
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA1.3 A DAE approach to Feedforward Control of Flexible Manipulators Stig Moberg and Sven Hanssen Abstract This work
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA1.3 A DAE approach to Feedforward Control of Flexible Manipulators Stig Moberg and Sven Hanssen Abstract This work
Introduction to centralized control
 Industrial Robots Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task velocities structured disturbance torques
Industrial Robots Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task velocities structured disturbance torques
Acknowledgements. Feedback Control of Bipedal Locomotion RAS Pioneer Award to Mark Spong. Videos and Papers
 Feedback Control of Bipedal Locomotion Acknowledgements Hae Won Park Post Doc MIT Koushil Sreenath Post Doc UPenn University of Michigan Jessy W. Grizzle Jerry W. and Carol L. Levin Professor of Engineering
Feedback Control of Bipedal Locomotion Acknowledgements Hae Won Park Post Doc MIT Koushil Sreenath Post Doc UPenn University of Michigan Jessy W. Grizzle Jerry W. and Carol L. Levin Professor of Engineering
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
Neural Network-Based Adaptive Control of Robotic Manipulator: Application to a Three Links Cylindrical Robot
 Vol.3 No., 27 مجلد 3 العدد 27 Neural Network-Based Adaptive Control of Robotic Manipulator: Application to a Three Links Cylindrical Robot Abdul-Basset A. AL-Hussein Electrical Engineering Department Basrah
Vol.3 No., 27 مجلد 3 العدد 27 Neural Network-Based Adaptive Control of Robotic Manipulator: Application to a Three Links Cylindrical Robot Abdul-Basset A. AL-Hussein Electrical Engineering Department Basrah
Sliding Modes in Control and Optimization
 Vadim I. Utkin Sliding Modes in Control and Optimization With 24 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Parti. Mathematical Tools 1
Vadim I. Utkin Sliding Modes in Control and Optimization With 24 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Parti. Mathematical Tools 1
An experimental robot load identification method for industrial application
 An experimental robot load identification method for industrial application Jan Swevers 1, Birgit Naumer 2, Stefan Pieters 2, Erika Biber 2, Walter Verdonck 1, and Joris De Schutter 1 1 Katholieke Universiteit
An experimental robot load identification method for industrial application Jan Swevers 1, Birgit Naumer 2, Stefan Pieters 2, Erika Biber 2, Walter Verdonck 1, and Joris De Schutter 1 1 Katholieke Universiteit
THE REACTION WHEEL PENDULUM
 THE REACTION WHEEL PENDULUM By Ana Navarro Yu-Han Sun Final Report for ECE 486, Control Systems, Fall 2013 TA: Dan Soberal 16 December 2013 Thursday 3-6pm Contents 1. Introduction... 1 1.1 Sensors (Encoders)...
THE REACTION WHEEL PENDULUM By Ana Navarro Yu-Han Sun Final Report for ECE 486, Control Systems, Fall 2013 TA: Dan Soberal 16 December 2013 Thursday 3-6pm Contents 1. Introduction... 1 1.1 Sensors (Encoders)...
Combining Real and Virtual Sensors for Measuring Interaction Forces and Moments Acting on a Robot
 216 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Daejeon Convention Center October 9-14, 216, Daejeon, Korea Combining Real and Virtual Sensors for Measuring Interaction Forces
216 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Daejeon Convention Center October 9-14, 216, Daejeon, Korea Combining Real and Virtual Sensors for Measuring Interaction Forces
Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots
 IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
Dynamics. describe the relationship between the joint actuator torques and the motion of the structure important role for
 Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Trajectory-tracking control of a planar 3-RRR parallel manipulator
 Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
Trajectory-tracking control of a planar 3-RRR parallel manipulator Chaman Nasa and Sandipan Bandyopadhyay Department of Engineering Design Indian Institute of Technology Madras Chennai, India Abstract
for Articulated Robot Arms and Its Applications
 141 Proceedings of the International Conference on Information and Automation, December 15-18, 25, Colombo, Sri Lanka. 1 Forcefree Control with Independent Compensation for Articulated Robot Arms and Its
141 Proceedings of the International Conference on Information and Automation, December 15-18, 25, Colombo, Sri Lanka. 1 Forcefree Control with Independent Compensation for Articulated Robot Arms and Its
Identification of Industrial Robot Parameters for Advanced Model-Based Controllers Design
 Identification of Industrial Robot Parameters for Advanced Model-Based Controllers Design Basilio Bona and Aldo Curatella Dipartimento di Automatica e Informatica Politecnico di Torino Corso Duca degli
Identification of Industrial Robot Parameters for Advanced Model-Based Controllers Design Basilio Bona and Aldo Curatella Dipartimento di Automatica e Informatica Politecnico di Torino Corso Duca degli
Multi-Priority Cartesian Impedance Control
 Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Force 9. Force Control
 195 Multimedia Contents Force 9. Force Control Luigi Villani, Joris De Schutter A fundamental requirement for the success of a manipulation task is the capability to handle the physical contact between
195 Multimedia Contents Force 9. Force Control Luigi Villani, Joris De Schutter A fundamental requirement for the success of a manipulation task is the capability to handle the physical contact between
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE
 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
Case Study: The Pelican Prototype Robot
 5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
WE PROPOSE a new approach to robust control of robot
 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 14, NO. 1, FEBRUARY 1998 69 An Optimal Control Approach to Robust Control of Robot Manipulators Feng Lin and Robert D. Brandt Abstract We present a new
IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 14, NO. 1, FEBRUARY 1998 69 An Optimal Control Approach to Robust Control of Robot Manipulators Feng Lin and Robert D. Brandt Abstract We present a new
A HYBRID SYSTEM APPROACH TO IMPEDANCE AND ADMITTANCE CONTROL. Frank Mathis
 A HYBRID SYSTEM APPROACH TO IMPEDANCE AND ADMITTANCE CONTROL By Frank Mathis A THESIS Submitted to Michigan State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
A HYBRID SYSTEM APPROACH TO IMPEDANCE AND ADMITTANCE CONTROL By Frank Mathis A THESIS Submitted to Michigan State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
Identifying the Dynamic Model Used by the KUKA LWR: A Reverse Engineering Approach
 4 IEEE International Conference on Robotics & Automation (ICRA Hong Kong Convention and Exhibition Center May 3 - June 7, 4 Hong Kong, China Identifying the Dynamic Model Used by the KUKA LWR: A Reverse
4 IEEE International Conference on Robotics & Automation (ICRA Hong Kong Convention and Exhibition Center May 3 - June 7, 4 Hong Kong, China Identifying the Dynamic Model Used by the KUKA LWR: A Reverse
Machine Intelligence and Robotic Control
 Volume 4, No. 3 / September 22 Machine Intelligence and Robotic Control Special Issue on Underactuated Robot Manipulators Guest Editorial: Special Issue on Underactuated Robot Manipulators 75 Keigo Watanabe
Volume 4, No. 3 / September 22 Machine Intelligence and Robotic Control Special Issue on Underactuated Robot Manipulators Guest Editorial: Special Issue on Underactuated Robot Manipulators 75 Keigo Watanabe
Trajectory tracking & Path-following control
 Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
Model Based Fault Detection and Diagnosis Using Structured Residual Approach in a Multi-Input Multi-Output System
 SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 4, No. 2, November 2007, 133-145 Model Based Fault Detection and Diagnosis Using Structured Residual Approach in a Multi-Input Multi-Output System A. Asokan
SERBIAN JOURNAL OF ELECTRICAL ENGINEERING Vol. 4, No. 2, November 2007, 133-145 Model Based Fault Detection and Diagnosis Using Structured Residual Approach in a Multi-Input Multi-Output System A. Asokan
Observer Based Friction Cancellation in Mechanical Systems
 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014) Oct. 22 25, 2014 in KINTEX, Gyeonggi-do, Korea Observer Based Friction Cancellation in Mechanical Systems Caner Odabaş
2014 14th International Conference on Control, Automation and Systems (ICCAS 2014) Oct. 22 25, 2014 in KINTEX, Gyeonggi-do, Korea Observer Based Friction Cancellation in Mechanical Systems Caner Odabaş
Funnel control in mechatronics: An overview
 Funnel control in mechatronics: An overview Position funnel control of stiff industrial servo-systems C.M. Hackl 1, A.G. Hofmann 2 and R.M. Kennel 1 1 Institute for Electrical Drive Systems and Power Electronics
Funnel control in mechatronics: An overview Position funnel control of stiff industrial servo-systems C.M. Hackl 1, A.G. Hofmann 2 and R.M. Kennel 1 1 Institute for Electrical Drive Systems and Power Electronics
Dissipative Systems Analysis and Control
 Bernard Brogliato, Rogelio Lozano, Bernhard Maschke and Olav Egeland Dissipative Systems Analysis and Control Theory and Applications 2nd Edition With 94 Figures 4y Sprin er 1 Introduction 1 1.1 Example
Bernard Brogliato, Rogelio Lozano, Bernhard Maschke and Olav Egeland Dissipative Systems Analysis and Control Theory and Applications 2nd Edition With 94 Figures 4y Sprin er 1 Introduction 1 1.1 Example
A Nonlinear Disturbance Observer for Robotic Manipulators
 932 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 47, NO. 4, AUGUST 2000 A Nonlinear Disturbance Observer for Robotic Manipulators Wen-Hua Chen, Member, IEEE, Donald J. Ballance, Member, IEEE, Peter
932 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 47, NO. 4, AUGUST 2000 A Nonlinear Disturbance Observer for Robotic Manipulators Wen-Hua Chen, Member, IEEE, Donald J. Ballance, Member, IEEE, Peter
Acceleration Feedback
 Acceleration Feedback Mechanical Engineer Modeling & Simulation Electro- Mechanics Electrical- Electronics Engineer Sensors Actuators Computer Systems Engineer Embedded Control Controls Engineer Mechatronic
Acceleration Feedback Mechanical Engineer Modeling & Simulation Electro- Mechanics Electrical- Electronics Engineer Sensors Actuators Computer Systems Engineer Embedded Control Controls Engineer Mechatronic
Robotics 1 Inverse kinematics
 Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Robotics 1 Inverse kinematics Prof. Alessandro De Luca Robotics 1 1 Inverse kinematics what are we looking for? direct kinematics is always unique; how about inverse kinematics for this 6R robot? Robotics
Video 1.1 Vijay Kumar and Ani Hsieh
 Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Video 1.1 Vijay Kumar and Ani Hsieh 1 Robotics: Dynamics and Control Vijay Kumar and Ani Hsieh University of Pennsylvania 2 Why? Robots live in a physical world The physical world is governed by the laws
Index. Index. More information. in this web service Cambridge University Press
 A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
Internal model based fault tolerant control of a robot manipulator
 Internal model based fault tolerant control of a robot manipulator Claudio Bonivento, Luca Gentili and Andrea Paoli Abstract In this paper an implicit fault tolerant control scheme is specialized for an
Internal model based fault tolerant control of a robot manipulator Claudio Bonivento, Luca Gentili and Andrea Paoli Abstract In this paper an implicit fault tolerant control scheme is specialized for an
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon
 Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Rigid Manipulator Control
 Rigid Manipulator Control The control problem consists in the design of control algorithms for the robot motors, such that the TCP motion follows a specified task in the cartesian space Two types of task
Rigid Manipulator Control The control problem consists in the design of control algorithms for the robot motors, such that the TCP motion follows a specified task in the cartesian space Two types of task
Efficient Swing-up of the Acrobot Using Continuous Torque and Impulsive Braking
 American Control Conference on O'Farrell Street, San Francisco, CA, USA June 9 - July, Efficient Swing-up of the Acrobot Using Continuous Torque and Impulsive Braking Frank B. Mathis, Rouhollah Jafari
American Control Conference on O'Farrell Street, San Francisco, CA, USA June 9 - July, Efficient Swing-up of the Acrobot Using Continuous Torque and Impulsive Braking Frank B. Mathis, Rouhollah Jafari
Adaptive iterative learning control for robot manipulators: Experimental results $
 Control Engineering Practice 4 (26) 843 85 www.elsevier.com/locate/conengprac Adaptive iterative learning control for robot manipulators: Experimental results $ A. Tayebi a,, S. Islam b, a Department of
Control Engineering Practice 4 (26) 843 85 www.elsevier.com/locate/conengprac Adaptive iterative learning control for robot manipulators: Experimental results $ A. Tayebi a,, S. Islam b, a Department of
Experimental Joint Stiffness Identification Depending on Measurements Availability
 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC Orlando FL USA December -5 Experimental Joint Stiffness Identification Depending on Measurements Availability A. Janot
5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC Orlando FL USA December -5 Experimental Joint Stiffness Identification Depending on Measurements Availability A. Janot
Lecture 9 Nonlinear Control Design. Course Outline. Exact linearization: example [one-link robot] Exact Feedback Linearization
![Lecture 9 Nonlinear Control Design. Course Outline. Exact linearization: example [one-link robot] Exact Feedback Linearization](/thumbs/83/87856505.jpg "Lecture 9 Nonlinear Control Design. Course Outline. Exact linearization: example [one-link robot] Exact Feedback Linearization") Lecture 9 Nonlinear Control Design Course Outline Eact-linearization Lyapunov-based design Lab Adaptive control Sliding modes control Literature: [Khalil, ch.s 13, 14.1,14.] and [Glad-Ljung,ch.17] Lecture
Lecture 9 Nonlinear Control Design Course Outline Eact-linearization Lyapunov-based design Lab Adaptive control Sliding modes control Literature: [Khalil, ch.s 13, 14.1,14.] and [Glad-Ljung,ch.17] Lecture
Overview of the Seminar Topic
 Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
EML5311 Lyapunov Stability & Robust Control Design
 EML5311 Lyapunov Stability & Robust Control Design 1 Lyapunov Stability criterion In Robust control design of nonlinear uncertain systems, stability theory plays an important role in engineering systems.
EML5311 Lyapunov Stability & Robust Control Design 1 Lyapunov Stability criterion In Robust control design of nonlinear uncertain systems, stability theory plays an important role in engineering systems.
Bi-Articular Muscle Actuation Design for Robot Arms
 Bi-Articular Muscle Actuation Design for Robot Arms V. Salvucci Y. Kimura S. Oh Y. Hori Hori-Fujimoto Lab, The University of Tokyo ICRA 2011 Workshop on Biologically-inspired Actuation, Shanghai Outline
Bi-Articular Muscle Actuation Design for Robot Arms V. Salvucci Y. Kimura S. Oh Y. Hori Hori-Fujimoto Lab, The University of Tokyo ICRA 2011 Workshop on Biologically-inspired Actuation, Shanghai Outline
Video 3.1 Vijay Kumar and Ani Hsieh
 Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
MEAM 510 Fall 2011 Bruce D. Kothmann
 Balancing g Robot Control MEAM 510 Fall 2011 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Balancing g Robot Control MEAM 510 Fall 2011 Bruce D. Kothmann Agenda Bruce s Controls Resume Simple Mechanics (Statics & Dynamics) of the Balancing Robot Basic Ideas About Feedback & Stability Effects
Control of Mobile Robots
 Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and