Passive Magnetic Attitude Control for CubeSat Spacecraft
|
|
|
- Lizbeth Walsh
- 6 years ago
- Views:
Transcription


1 Passive Magnetic Attitude Control for CubeSat Spacecraft David Gerhardt Advisor: Dr. Scott Palo University of Colorado at Boulder Department of Aerospace Engineering Sciences August 11, 2010

2 Motivation Low cost & performance, simple, robust High cost & performance, complex Bar Magnet & Hysteresis Rods Magnetic Torque Coils Momentum Wheels Difficulties: Design, Modeling & Testing 2
3 Application: CSSWE Colorado Student Space Weather Experiment B Charged particle detection / classification Mag. field alignment benefit km, 55 deg. inclination ADCS requirements: 10 day settling time Settle to B ±15 3
4 PMAC Description Hardware Bar magnet - restoring torque Hysteresis rods - dampening torque Performance Alignment within ±10 deg. of B Settling time 1-2 weeks (varies with ω 0 ) Hyst. rods Bar magnet 4
5 PMAC Design Torque Expected Magnitude (N m) Major Contributor Aerodynamic 4.5E-8 CoM offset Gravity Gradient 2.5E-8 MoI difference Radiometric 6.0E-9 Solar Residual mag. field 1.3E-8 Materials / electronics Sum Minor inertia axis B 8.9E-8 T m magnet m Bsin β magnet B earth max 15 Tenv 5
6 PMAC Design Slow convergence Offset error high Hyst. Rod Vol. System volume limitations low Bar Magnet Strength high Does not overcome other torques Slow convergence Oscillatory error low 6
 Parallelogram model (hyst.")
7 PMAC Simulation MATLAB ode45 integrator Euler rotational EoM + Euler Parameter kinematic diff EQ I I I xx yy zz x y z I I zz xx External torque inputs Dipole model (earth mag.) Parallelogram model (hyst.) Aerodynamic Gravity gradient Residual magnetic field I I yy zz I yy I xx x y Lz y z z x L L x y 7
8 PMAC Simulation Nominal Results Error tolerance Hysteresis rods / axis Initial angular velocity Residual magnetism Bar magnet strength Hysteresis parameters Hysteresis volume Center of mass CUBESIM comparison Moment of inertia / axis Orbit altitude / inclination Initial orientation m ω 0 Rods/ axis 8


9 Nominal Results B β 9


10 Error Tolerance 10

11 Nominal Results X Z Y 11
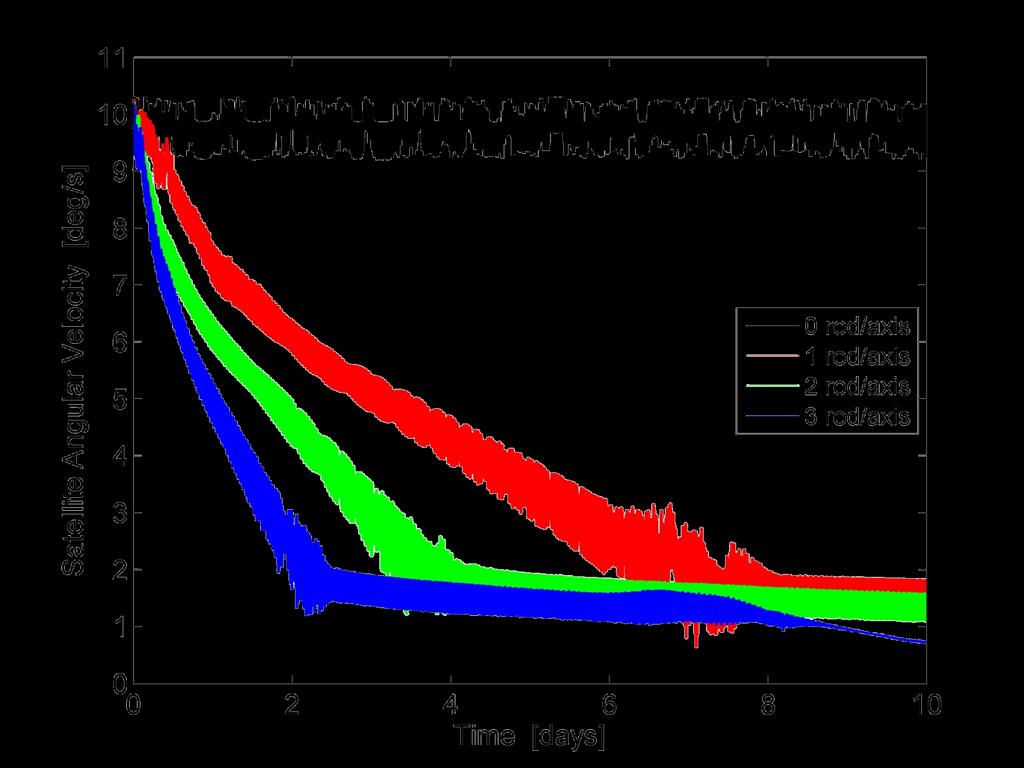

12 Hysteresis Rods / Axis 12

13 Initial Angular Velocity X ω 0 Z Y 13

14 Residual Magnetism B m 14


15 Residual Magnetism B m 15
16 Conclusion PMAC: inexpensive, coarse (10 deg) pointing Use model to guide design Performance factors Bar magnet strength (0.30 Am 2 ) Hysteresis rod volume (3 rods) Residual magnetic moment (<0.05 Am 2 ) Future Work Lagrangian integrator 16
17 Acknowledgements CSSWE team LASP + CU advisors 17
18 Acknowledgements CSSWE team LASP + CU advisors dgerhard@colorado.edu 18




19 Acknowledgements CSSWE team LASP + CU advisors dgerhard@colorado.edu QUESTIONS? 19
20 Recent Heritage Munin, 6kg, 2000 Unisat-4, 12kg, 2006 (launch failure) GeneSat-1, 4.5kg,
21 PMAC Design: Hyst. Rod Hysteresis loop size = dampening Loop characterized by Coercive force Hc Remanence Br Saturation Bs material apparent Material vs. apparent parameters Each rod unique F. Santoni, M. Zelli, Passive Magnetic Attitude Stabilization of the UNISAT-4 microsatellite 21
22 Nominal Input Input Value Unit End Time 10 Days Error tolerance 5E-8 Initial ang. vel. 10 deg. / s Bar Magnet Strength 0.3 Am 2 Hyst rods 3 per axis Hyst rod length 9.5 cm Hyst rod diameter 1 mm C D 2.4 CoM offset 0.75 cm Residual dipole 0.01 Am 2 22
23 Beta Zoom B β 23
24 Angular Velocity Zoom X Z Y 24


25 CUBESIM comparison material apparent 25
26 Error Tolerance Zoom B β 26
27 Initial Angular Velocity Zoom B β 27
28 Center of Mass X Z Y 28
29 Center of Mass X Z Y 29

30 Center of Mass X Z Y 30
31 Center of Mass Zoom X Z Y 31
Pointing Control for Low Altitude Triple Cubesat Space Darts
 Pointing Control for Low Altitude Triple Cubesat Space Darts August 12 th, 2009 U.S. Naval Research Laboratory Washington, D.C. Code 8231-Attitude Control System James Armstrong, Craig Casey, Glenn Creamer,
Pointing Control for Low Altitude Triple Cubesat Space Darts August 12 th, 2009 U.S. Naval Research Laboratory Washington, D.C. Code 8231-Attitude Control System James Armstrong, Craig Casey, Glenn Creamer,
Orbital Environment Simulator
 Orbital Environment Simulator Samir Rawashdeh Space Systems Laboratory University of Kentucky 2009 Summer CubeSat Developers' Workshop August 9, 2009 Overview Introduction Implementation Details Capabilities
Orbital Environment Simulator Samir Rawashdeh Space Systems Laboratory University of Kentucky 2009 Summer CubeSat Developers' Workshop August 9, 2009 Overview Introduction Implementation Details Capabilities
The Torque Rudder: A Novel Semi-Passive Actuator for Small Spacecraft Attitude Control
 The Torque Rudder: A Novel Semi-Passive Actuator for Small Spacecraft Attitude Control Grant Bonin, Vincent Tarantini, Luke Stras, and Robert E. Zee UTIAS Space Flight Laboratory Toronto, On. Canada M3H
The Torque Rudder: A Novel Semi-Passive Actuator for Small Spacecraft Attitude Control Grant Bonin, Vincent Tarantini, Luke Stras, and Robert E. Zee UTIAS Space Flight Laboratory Toronto, On. Canada M3H
A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities
 A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities Sanny Omar Dr. David Beale Dr. JM Wersinger Introduction ADACS designed for CubeSats CubeSats
A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities Sanny Omar Dr. David Beale Dr. JM Wersinger Introduction ADACS designed for CubeSats CubeSats
Generation X. Attitude Control Systems (ACS) Aprille Ericsson Dave Olney Josephine San. July 27, 2000
 Aprille Ericsson Dave Olney Josephine San. July 27, 2000") Generation X Attitude Control Systems (ACS) Aprille Ericsson Dave Olney Josephine San July 27, 2000 ACS Overview Requirements Assumptions Disturbance Torque Assessment Component and Control Mode Recommendations
Generation X Attitude Control Systems (ACS) Aprille Ericsson Dave Olney Josephine San July 27, 2000 ACS Overview Requirements Assumptions Disturbance Torque Assessment Component and Control Mode Recommendations
Hysteresis Nutation Damper for Spin Satellite
 Hysteresis Nutation Damper for Spin Satellite Hamed Shahmohamadi Ousaloo * Send Orders for Reprints to reprints@benthamscience.net The Open Aerospace Engineering Journal, 2013, 6, 1-5 1 Open Access Space
Hysteresis Nutation Damper for Spin Satellite Hamed Shahmohamadi Ousaloo * Send Orders for Reprints to reprints@benthamscience.net The Open Aerospace Engineering Journal, 2013, 6, 1-5 1 Open Access Space
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon
 Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Attitude Control Strategy for HAUSAT-2 with Pitch Bias Momentum System
 SSC06-VII-5 Attitude Control Strategy for HAUSAT-2 with Pitch Bias Momentum System Young-Keun Chang, Seok-Jin Kang, Byung-Hoon Lee, Jung-on Choi, Mi-Yeon Yun and Byoung-Young Moon School of Aerospace and
SSC06-VII-5 Attitude Control Strategy for HAUSAT-2 with Pitch Bias Momentum System Young-Keun Chang, Seok-Jin Kang, Byung-Hoon Lee, Jung-on Choi, Mi-Yeon Yun and Byoung-Young Moon School of Aerospace and
An Agile Multi-Use Nano Star Camera for Constellation Applications
 An Agile Multi-Use Nano Star Camera for Constellation Applications Scott Palo 1,2, George Stafford 2 and Alan Hoskins 1 1 University of Colorado 2 Blue Canyon Technologies Partnership The BCT technical
An Agile Multi-Use Nano Star Camera for Constellation Applications Scott Palo 1,2, George Stafford 2 and Alan Hoskins 1 1 University of Colorado 2 Blue Canyon Technologies Partnership The BCT technical
Design of Attitude Determination and Control Subsystem
 Design of Attitude Determination and Control Subsystem 1) Control Modes and Requirements Control Modes: Control Modes Explanation 1 ) Spin-Up Mode - Acquisition of Stability through spin-up maneuver -
Design of Attitude Determination and Control Subsystem 1) Control Modes and Requirements Control Modes: Control Modes Explanation 1 ) Spin-Up Mode - Acquisition of Stability through spin-up maneuver -
Chapter 8 Part 1. Attitude Dynamics: Disturbance Torques AERO-423
 Chapter 8 Part 1 Attitude Dynamics: Disturbance Torques AEO-43 Types of Disturbance Torques Solar Pressure Dominant torque for geosynchronous satellites Gravity Gradient Can be disturbance or control torque
Chapter 8 Part 1 Attitude Dynamics: Disturbance Torques AEO-43 Types of Disturbance Torques Solar Pressure Dominant torque for geosynchronous satellites Gravity Gradient Can be disturbance or control torque
Lecture Module 5: Introduction to Attitude Stabilization and Control
 1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
Integrated Test Facility for Nanosat Assessment and Verification
 Integrated Test Facility for Nanosat Assessment and Verification Steve Wassom, Quinn Young, Bryan Bingham, Rees Fullmer, Mitch Whiteley, Robert Burt, Mike Watson, Tom Ortiz, Joe Richards, Sam Wilcox Utah
Integrated Test Facility for Nanosat Assessment and Verification Steve Wassom, Quinn Young, Bryan Bingham, Rees Fullmer, Mitch Whiteley, Robert Burt, Mike Watson, Tom Ortiz, Joe Richards, Sam Wilcox Utah
Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels
 Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels Fuyuto Terui a, Nobutada Sako b, Keisuke Yoshihara c, Toru Yamamoto c, Shinichi Nakasuka b a National Aerospace Laboratory
Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels Fuyuto Terui a, Nobutada Sako b, Keisuke Yoshihara c, Toru Yamamoto c, Shinichi Nakasuka b a National Aerospace Laboratory
CHAPTER 5 FUZZY LOGIC FOR ATTITUDE CONTROL
 104 CHAPTER 5 FUZZY LOGIC FOR ATTITUDE CONTROL 5.1 INTRODUCTION Fuzzy control is one of the most active areas of research in the application of fuzzy set theory, especially in complex control tasks, which
104 CHAPTER 5 FUZZY LOGIC FOR ATTITUDE CONTROL 5.1 INTRODUCTION Fuzzy control is one of the most active areas of research in the application of fuzzy set theory, especially in complex control tasks, which
Design and Implementation of a Space Environment Simulation Toolbox for Small Satellites
 56th International Astronautical Congress 25 35th Student Conference (IAF W.) IAC-5-E2.3.6 Design and Implementation of a Space Environment Simulation Toolbox for Small Satellites Rouzbeh Amini, Jesper
56th International Astronautical Congress 25 35th Student Conference (IAF W.) IAC-5-E2.3.6 Design and Implementation of a Space Environment Simulation Toolbox for Small Satellites Rouzbeh Amini, Jesper
Quaternion-Based Tracking Control Law Design For Tracking Mode
 A. M. Elbeltagy Egyptian Armed forces Conference on small satellites. 2016 Logan, Utah, USA Paper objectives Introduction Presentation Agenda Spacecraft combined nonlinear model Proposed RW nonlinear attitude
A. M. Elbeltagy Egyptian Armed forces Conference on small satellites. 2016 Logan, Utah, USA Paper objectives Introduction Presentation Agenda Spacecraft combined nonlinear model Proposed RW nonlinear attitude
MAE 142 Homework #5 Due Friday, March 13, 2009
 MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
MAE 142 Homework #5 Due Friday, March 13, 2009 Please read through the entire homework set before beginning. Also, please label clearly your answers and summarize your findings as concisely as possible.
Design Architecture of Attitude Determination and Control System of ICUBE
 Design Architecture of Attitude Determination and Control System of ICUBE 9th Annual Spring CubeSat Developers' Workshop, USA Author : Co-Author: Affiliation: Naqvi Najam Abbas Dr. Li YanJun Space Academy,
Design Architecture of Attitude Determination and Control System of ICUBE 9th Annual Spring CubeSat Developers' Workshop, USA Author : Co-Author: Affiliation: Naqvi Najam Abbas Dr. Li YanJun Space Academy,
INTERNAL THALES ALENIA SPACE
 Workshop Galileo Galilei (GG) and GGG lab prototype: state of the art and new possibilities Template reference : 100181670S-EN GG error budget from the end-to-end simulator developed at TAS-I Giuseppe
Workshop Galileo Galilei (GG) and GGG lab prototype: state of the art and new possibilities Template reference : 100181670S-EN GG error budget from the end-to-end simulator developed at TAS-I Giuseppe
EE363 Automatic Control: Midterm Exam (4 problems, 90 minutes)
") EE363 Automatic Control: Midterm Exam (4 problems, 90 minutes) ) Block diagram simplification (0 points). Simplify the following block diagram.,i.e., find the transfer function from u to y. Your answer
EE363 Automatic Control: Midterm Exam (4 problems, 90 minutes) ) Block diagram simplification (0 points). Simplify the following block diagram.,i.e., find the transfer function from u to y. Your answer
An Attitude Control System and Commissioning Results of the SNAP-1 Nanosatellite
 An Attitude Control System and Commissioning Results of the SNAP-1 Nanosatellite WH Steyn, Y Hashida and V Lappas Surrey Space Centre University of Surrey Guildford, Surrey GU2 5XH United Kingdom Abstract.
An Attitude Control System and Commissioning Results of the SNAP-1 Nanosatellite WH Steyn, Y Hashida and V Lappas Surrey Space Centre University of Surrey Guildford, Surrey GU2 5XH United Kingdom Abstract.
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
Simplified Filtering Estimator for Spacecraft Attitude Determination from Phase Information of GPS Signals
 WCE 7, July - 4, 7, London, U.K. Simplified Filtering Estimator for Spacecraft Attitude Determination from Phase Information of GPS Signals S. Purivigraipong, Y. Hashida, and M. Unwin Abstract his paper
WCE 7, July - 4, 7, London, U.K. Simplified Filtering Estimator for Spacecraft Attitude Determination from Phase Information of GPS Signals S. Purivigraipong, Y. Hashida, and M. Unwin Abstract his paper
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM. M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010
 FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
CHAPTER 2 MAGNETISM. 2.1 Magnetic materials
 CHAPTER 2 MAGNETISM Magnetism plays a crucial role in the development of memories for mass storage, and in sensors to name a few. Spintronics is an integration of the magnetic material with semiconductor
CHAPTER 2 MAGNETISM Magnetism plays a crucial role in the development of memories for mass storage, and in sensors to name a few. Spintronics is an integration of the magnetic material with semiconductor
Launches and On-Orbit Performance
 Launches and On-Orbit Performance An Update on Nanosatellite Missions at the UTIAS Space Flight Laboratory Daniel D. Kekez,, Robert E. Zee, Freddy M. Pranajaya Space Flight Laboratory University of Toronto
Launches and On-Orbit Performance An Update on Nanosatellite Missions at the UTIAS Space Flight Laboratory Daniel D. Kekez,, Robert E. Zee, Freddy M. Pranajaya Space Flight Laboratory University of Toronto
Attitude control system for ROCSAT-3 microsatellite: a conceptual design
 Acta Astronautica 56 (5) 9 5 www.elsevier.com/locate/actaastro Attitude control system for ROCSAT- microsatellite: a conceptual design Y.W. Jan a;b; ;, J.C. Chiou b; a National Space Program Oce, Hsinchu,
Acta Astronautica 56 (5) 9 5 www.elsevier.com/locate/actaastro Attitude control system for ROCSAT- microsatellite: a conceptual design Y.W. Jan a;b; ;, J.C. Chiou b; a National Space Program Oce, Hsinchu,
Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS
 SSC17-P1-17 Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS Masayuki Katayama, Yuta Suzaki Mitsubishi Precision Company Limited 345 Kamikmachiya, Kamakura
SSC17-P1-17 Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS Masayuki Katayama, Yuta Suzaki Mitsubishi Precision Company Limited 345 Kamikmachiya, Kamakura
Experimental Analysis of Low Earth Orbit Satellites due to Atmospheric Perturbations
 Experimental Analysis of Low Earth Orbit Satellites due to Atmospheric Perturbations Aman Saluja #1, Manish Bansal #2, M Raja #3, Mohd Maaz #4 #Aerospace Department, University of Petroleum and Energy
Experimental Analysis of Low Earth Orbit Satellites due to Atmospheric Perturbations Aman Saluja #1, Manish Bansal #2, M Raja #3, Mohd Maaz #4 #Aerospace Department, University of Petroleum and Energy
Attitude Determination and Control System Design for STU-2A Cubesat and In-Orbit Results
 13 th Annual Summer CubeSat Developer s Workshop August 6-7, 2016, Logan, Utah Attitude Determination and Control System Design for STU-2A Cubesat and In-Orbit Results Presented by Shufan Wu Guowen Sun,
13 th Annual Summer CubeSat Developer s Workshop August 6-7, 2016, Logan, Utah Attitude Determination and Control System Design for STU-2A Cubesat and In-Orbit Results Presented by Shufan Wu Guowen Sun,
REACTION WHEEL CONFIGURATIONS FOR HIGH AND MIDDLE INCLINATION ORBITS
 REACTION WHEEL CONFIGURATIONS FOR HIGH AND MIDDLE INCLINATION ORBITS Zuliana Ismail and Renuganth Varatharajoo Department of Aerospace Engineering, Universiti Putra Malaysia, Malaysia E-Mail: zuliana.ismail@gmail.com
REACTION WHEEL CONFIGURATIONS FOR HIGH AND MIDDLE INCLINATION ORBITS Zuliana Ismail and Renuganth Varatharajoo Department of Aerospace Engineering, Universiti Putra Malaysia, Malaysia E-Mail: zuliana.ismail@gmail.com
Robot Control Basics CS 685
 Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Robot Control Basics CS 685 Control basics Use some concepts from control theory to understand and learn how to control robots Control Theory general field studies control and understanding of behavior
Manipulator Dynamics 2. Instructor: Jacob Rosen Advanced Robotic - MAE 263D - Department of Mechanical & Aerospace Engineering - UCLA
 Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
Manipulator Dynamics 2 Forward Dynamics Problem Given: Joint torques and links geometry, mass, inertia, friction Compute: Angular acceleration of the links (solve differential equations) Solution Dynamic
ENAE483: Principles of Space System Design Power Propulsion Thermal System
 Power Propulsion Thermal System Team B4: Ben Abresch Jason Burr Kevin Lee Scott Wingate November 8th, 2012 Presentation Overview Mission Guidelines Project Specifications Initial Design Power Thermal Insulation
Power Propulsion Thermal System Team B4: Ben Abresch Jason Burr Kevin Lee Scott Wingate November 8th, 2012 Presentation Overview Mission Guidelines Project Specifications Initial Design Power Thermal Insulation
Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers
 Osaka University March 15, 2018 Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers Elisabetta Punta CNR-IEIIT, Italy Problem Statement First Case Spacecraft Model Position Dynamics Attitude
Osaka University March 15, 2018 Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers Elisabetta Punta CNR-IEIIT, Italy Problem Statement First Case Spacecraft Model Position Dynamics Attitude
3D Pendulum Experimental Setup for Earth-based Testing of the Attitude Dynamics of an Orbiting Spacecraft
 3D Pendulum Experimental Setup for Earth-based Testing of the Attitude Dynamics of an Orbiting Spacecraft Mario A. Santillo, Nalin A. Chaturvedi, N. Harris McClamroch, Dennis S. Bernstein Department of
3D Pendulum Experimental Setup for Earth-based Testing of the Attitude Dynamics of an Orbiting Spacecraft Mario A. Santillo, Nalin A. Chaturvedi, N. Harris McClamroch, Dennis S. Bernstein Department of
EQUATIONS OF MOTION: ROTATION ABOUT A FIXED AXIS (Section 17.4) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid
 Today s Objectives: Students will be able to analyze the planar kinetics of a rigid") EQUATIONS OF MOTION: ROTATION ABOUT A FIXED AXIS (Section 17.4) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body undergoing rotational motion. APPLICATIONS The crank
EQUATIONS OF MOTION: ROTATION ABOUT A FIXED AXIS (Section 17.4) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body undergoing rotational motion. APPLICATIONS The crank
PRELIMINARY HARDWARE DESIGN OF ATTITUDE CONTROL SUBSYSTEM OF LEONIDAS SPACECRAFT
 PRELIMINARY HARDWARE DESIGN OF ATTITUDE CONTROL SUBSYSTEM OF LEONIDAS SPACECRAFT Chak Shing Jackie Chan College of Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT In order to monitor
PRELIMINARY HARDWARE DESIGN OF ATTITUDE CONTROL SUBSYSTEM OF LEONIDAS SPACECRAFT Chak Shing Jackie Chan College of Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT In order to monitor
Model-based Simulation of Passive Attitude Control of SLUCUBE-2 Using Nonlinear Hysteresis and Geomagnetic Models
 nternational Journal of Aerospace Sciences 01, 1(4): 77-84 DO: 10.593/j.aerospace.010104.04 Model-based Simulation of Passive Attitude Control of SLUCUE- Using Nonlinear Hysteresis and Geomagnetic Models
nternational Journal of Aerospace Sciences 01, 1(4): 77-84 DO: 10.593/j.aerospace.010104.04 Model-based Simulation of Passive Attitude Control of SLUCUE- Using Nonlinear Hysteresis and Geomagnetic Models
Satellite attitude control using electrodynamic booms
 Int. J. Space Science and Engineering, Vol. 1, No. 1, 2013 51 Satellite attitude control using electrodynamic booms Brian Wong* Spacecraft Dynamics and Control Lab, University of Toronto Institute for
Int. J. Space Science and Engineering, Vol. 1, No. 1, 2013 51 Satellite attitude control using electrodynamic booms Brian Wong* Spacecraft Dynamics and Control Lab, University of Toronto Institute for
Absolute Radiometric Calibration Using a Solar Reflector in Near-Geosynchronous Orbit
 Absolute Radiometric Calibration Using a Solar Reflector in Near-Geosynchronous Orbit Richard J. Rudy, Ray W. Russell, Dan J. Mabry, Andrea M. Gilbert, Paul V. Anderson, David J. Gutierrez (The Aerospace
Absolute Radiometric Calibration Using a Solar Reflector in Near-Geosynchronous Orbit Richard J. Rudy, Ray W. Russell, Dan J. Mabry, Andrea M. Gilbert, Paul V. Anderson, David J. Gutierrez (The Aerospace
An Inverse Dynamics Attitude Control System with Autonomous Calibration. Sanny Omar Dr. David Beale Dr. JM Wersinger
 An Inverse Dynamics Attitude Control System with Autonomous Calibration Sanny Omar Dr. David Beale Dr. JM Wersinger Outline Attitude Determination and Control Systems (ADACS) Overview Coordinate Frames
An Inverse Dynamics Attitude Control System with Autonomous Calibration Sanny Omar Dr. David Beale Dr. JM Wersinger Outline Attitude Determination and Control Systems (ADACS) Overview Coordinate Frames
Jitter and Basic Requirements of the Reaction Wheel Assembly in the Attitude Control System
 Jitter and Basic Requirements of the Reaction Wheel Assembly in the Attitude Control System Lulu Liu August, 7 1 Brief Introduction Photometric precision is a major concern in this space mission. A pointing
Jitter and Basic Requirements of the Reaction Wheel Assembly in the Attitude Control System Lulu Liu August, 7 1 Brief Introduction Photometric precision is a major concern in this space mission. A pointing
D-SAT Simplified Magnetic Attitude Control
 D-SAT Simplified Magnetic Attitude Control Warren K. Soh, Norhizam Hamzah, Ahmad Sabirin Arshad Astronautic Technology (M) Sdn. Bhd. (ATSB) Suite G1A, Enterprise 3, Technology Park Malaysia, Bukit Jalil
D-SAT Simplified Magnetic Attitude Control Warren K. Soh, Norhizam Hamzah, Ahmad Sabirin Arshad Astronautic Technology (M) Sdn. Bhd. (ATSB) Suite G1A, Enterprise 3, Technology Park Malaysia, Bukit Jalil
OPTIMAL DISCRETE-TIME MAGNETIC ATTITUDE CONTROL OF SATELLITES. M. Lovera and A. Varga
 OPTIMAL DISCRETE-TIME MAGNETIC ATTITUDE CONTROL OF SATELLITES M Lovera and A Varga Dipartimento di Elettronica e Informazione Politecnico di Milano Pza Leonardo da Vinci 3, 33 Milano, Italy Phone: + 39
OPTIMAL DISCRETE-TIME MAGNETIC ATTITUDE CONTROL OF SATELLITES M Lovera and A Varga Dipartimento di Elettronica e Informazione Politecnico di Milano Pza Leonardo da Vinci 3, 33 Milano, Italy Phone: + 39
Two Methods for Determining the Moment of a Magnet Inside a Cue Ball
 WJP X, XXXX.XX Wabash (20XX) Journal of Physics 1 Two Methods for Determining the Moment of a Magnet Inside a Cue Ball Adam L. Fritsch and Thomas F. Pizarek Department of Physics, Wabash College, Crawfordsville,
WJP X, XXXX.XX Wabash (20XX) Journal of Physics 1 Two Methods for Determining the Moment of a Magnet Inside a Cue Ball Adam L. Fritsch and Thomas F. Pizarek Department of Physics, Wabash College, Crawfordsville,
Hybrid spacecraft attitude control system
 Int. Jnl. of Multiphysics Volume 1 Number 2 2007 221 Hybrid spacecraft attitude control system Renuganth Varatharajoo *, Ramly Ajir, Tamizi Ahmad Department of Aerospace Engineering, University Putra Malaysia,
Int. Jnl. of Multiphysics Volume 1 Number 2 2007 221 Hybrid spacecraft attitude control system Renuganth Varatharajoo *, Ramly Ajir, Tamizi Ahmad Department of Aerospace Engineering, University Putra Malaysia,
III. Work and Energy
 Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
James Paul Mason CU Boulder LASP
 On-Orbit Performance and the First Flight of the BCT XACT 3-axis ADCS James Paul Mason CU Boulder LASP photo credit: NASA/ESA Tim Peake Matthew D. Baumgart, Thomas N. Woods, Chloe Downs, (BCT) Daniel Hegel,
On-Orbit Performance and the First Flight of the BCT XACT 3-axis ADCS James Paul Mason CU Boulder LASP photo credit: NASA/ESA Tim Peake Matthew D. Baumgart, Thomas N. Woods, Chloe Downs, (BCT) Daniel Hegel,
Experiment Design and Performance. G. Catastini TAS-I (BUOOS)
") Experiment Design and Performance G. Catastini TAS-I (BUOOS) 10 EP and the GRT Einstein s General Relativity Theory Weak Equivalence Principle: all test particles at the same space-time point in a given
Experiment Design and Performance G. Catastini TAS-I (BUOOS) 10 EP and the GRT Einstein s General Relativity Theory Weak Equivalence Principle: all test particles at the same space-time point in a given
COUPLED ORBITAL AND ATTITUDE CONTROL SIMULATION
 COUPLED ORBITAL AND ATTITUDE CONTROL SIMULATION Scott E. Lennox AOE 5984: Advanced Attitude Spacecraft Dynamics and Control December 12, 23 INTRODUCTION In the last few years the space industry has started
COUPLED ORBITAL AND ATTITUDE CONTROL SIMULATION Scott E. Lennox AOE 5984: Advanced Attitude Spacecraft Dynamics and Control December 12, 23 INTRODUCTION In the last few years the space industry has started
Simulation of Hysteresis In Permalloy Films
 GQ-02 1 Simulation of Hysteresis In Permalloy Films Andrew Kunz and Chuck Campbell Magnetic Microscopy Center University of Minnesota Minneapolis, MN Introduction 2 Looking for the classical behavior of
GQ-02 1 Simulation of Hysteresis In Permalloy Films Andrew Kunz and Chuck Campbell Magnetic Microscopy Center University of Minnesota Minneapolis, MN Introduction 2 Looking for the classical behavior of
2. When the current flowing through a wire loop is halved, its magnetic moment will become a. half. b. one-fourth. c. double. d. quadruple.
 13 1. When a magnetic needle is kept in a uniform magnetic field, it experiences a. neither a force nor a torque. b. a force and not a torque. c. a torque and a force. d. only a torque.. Magnetic lines
13 1. When a magnetic needle is kept in a uniform magnetic field, it experiences a. neither a force nor a torque. b. a force and not a torque. c. a torque and a force. d. only a torque.. Magnetic lines
Electron spin resonance
 Quick reference guide Introduction This is a model experiment for electron spin resonance, for clear demonstration of interaction between the magnetic moment of the electron spin with a superimposed direct
Quick reference guide Introduction This is a model experiment for electron spin resonance, for clear demonstration of interaction between the magnetic moment of the electron spin with a superimposed direct
On-Orbit Performance of KOMPSAT-2 AOCS Korea Aerospace Research Institute Seung-Wu Rhee, Ph. D.
 SSC07-VII-9 On-Orbit Performance of AOCS 2007. 8. Korea Aerospace Research Institute Seung-Wu Rhee, Ph. D. 1 Program - is Low Earth Orbit Satellite - Mission : Cartographic Mission of Korean Peninsula
SSC07-VII-9 On-Orbit Performance of AOCS 2007. 8. Korea Aerospace Research Institute Seung-Wu Rhee, Ph. D. 1 Program - is Low Earth Orbit Satellite - Mission : Cartographic Mission of Korean Peninsula
Adaptive Control of Space Station
 ~~ NASA Adaptive Control of Space Station with Control Moment Gyros Robert H. Bishop, Scott J. Paynter and John W. Sunkel An adaptive control approach is investigated for the Space Station. The main components
~~ NASA Adaptive Control of Space Station with Control Moment Gyros Robert H. Bishop, Scott J. Paynter and John W. Sunkel An adaptive control approach is investigated for the Space Station. The main components
Development of an Active Magnetic Attitude Determination and Control System for Picosatellites on highly inclined circular Low Earth Orbits
 Development of an Active Magnetic Attitude Determination and Control System for Picosatellites on highly inclined circular Low Earth Orbits A thesis submitted in fulfilment of the requirements for the
Development of an Active Magnetic Attitude Determination and Control System for Picosatellites on highly inclined circular Low Earth Orbits A thesis submitted in fulfilment of the requirements for the
Attitude Determination and. Attitude Control
 Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
Attitude Determination and Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky area with the telescope.
Lecture AC-1. Aircraft Dynamics. Copy right 2003 by Jon at h an H ow
 Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
Lecture AC-1 Aircraft Dynamics Copy right 23 by Jon at h an H ow 1 Spring 23 16.61 AC 1 2 Aircraft Dynamics First note that it is possible to develop a very good approximation of a key motion of an aircraft
ENGG 5402 Course Project: Simulation of PUMA 560 Manipulator
 ENGG 542 Course Project: Simulation of PUMA 56 Manipulator ZHENG Fan, 115551778 mrzhengfan@gmail.com April 5, 215. Preface This project is to derive programs for simulation of inverse dynamics and control
ENGG 542 Course Project: Simulation of PUMA 56 Manipulator ZHENG Fan, 115551778 mrzhengfan@gmail.com April 5, 215. Preface This project is to derive programs for simulation of inverse dynamics and control
PASSIVE ATTITUDE STABILIZATION FOR SMALL SATELLITES
 University of Kentucky UKnowledge University of Kentucky Master's Theses Graduate School 2010 PASSIVE ATTITUDE STABILIZATION FOR SMALL SATELLITES Samir Ahmed Rawashdeh University of Kentucky, SAMIR.RAWASHDEH@GMAIL.COM
University of Kentucky UKnowledge University of Kentucky Master's Theses Graduate School 2010 PASSIVE ATTITUDE STABILIZATION FOR SMALL SATELLITES Samir Ahmed Rawashdeh University of Kentucky, SAMIR.RAWASHDEH@GMAIL.COM
Magnetic moment measurements
 Magnetic moment measurements Davíð Örn Þorsteinsson (1), Guðjón Henning Hilmarsson (2) and Saga Huld Helgadóttir (3) 1) dth21@hi.is 2) ghh9@hi.is and 3) shh14@hi.is Abstract: A uniform magnetic field makes
Magnetic moment measurements Davíð Örn Þorsteinsson (1), Guðjón Henning Hilmarsson (2) and Saga Huld Helgadóttir (3) 1) dth21@hi.is 2) ghh9@hi.is and 3) shh14@hi.is Abstract: A uniform magnetic field makes
I I I I I I I I I I I A NEW ATTITUDE CONTROL MECHANISM FOR LEO SATELLITES. Mark R. Krebs Orbital Sciences Corporation Dulles.
 A NEW ATTTUDE CONTROL MECHANSM FOR LEO SATELLTES Abstract ORBCOMM is a LEO communications spacecraft, providing global point to point packet messaging. Two are in operation now, and the rest of the (eventually
A NEW ATTTUDE CONTROL MECHANSM FOR LEO SATELLTES Abstract ORBCOMM is a LEO communications spacecraft, providing global point to point packet messaging. Two are in operation now, and the rest of the (eventually
Optimal Fault-Tolerant Configurations of Thrusters
 Optimal Fault-Tolerant Configurations of Thrusters By Yasuhiro YOSHIMURA ) and Hirohisa KOJIMA, ) ) Aerospace Engineering, Tokyo Metropolitan University, Hino, Japan (Received June st, 7) Fault tolerance
Optimal Fault-Tolerant Configurations of Thrusters By Yasuhiro YOSHIMURA ) and Hirohisa KOJIMA, ) ) Aerospace Engineering, Tokyo Metropolitan University, Hino, Japan (Received June st, 7) Fault tolerance
1. Which of the following is the unit for angular displacement? A. Meters B. Seconds C. Radians D. Radian per second E. Inches
 AP Physics B Practice Questions: Rotational Motion Multiple-Choice Questions 1. Which of the following is the unit for angular displacement? A. Meters B. Seconds C. Radians D. Radian per second E. Inches
AP Physics B Practice Questions: Rotational Motion Multiple-Choice Questions 1. Which of the following is the unit for angular displacement? A. Meters B. Seconds C. Radians D. Radian per second E. Inches
Satellite Dynamics Simulator Development Using Lie Group Variational Integrator
 Satellite Dynamics Simulator Development Using Lie Group Variational Integrator Daeyoung Lee, John C. Springmann, and Sara C. Spangelo and James W. Cutler Aerospace Engineering, University of Michigan,
Satellite Dynamics Simulator Development Using Lie Group Variational Integrator Daeyoung Lee, John C. Springmann, and Sara C. Spangelo and James W. Cutler Aerospace Engineering, University of Michigan,
Attitude Control on the Pico Satellite Solar Cell Testbed-2
 SSC12-II-1 Attitude Control on the Pico Satellite Solar Cell Testbed-2 Siegfried W. Janson, Brian S. Hardy, Andrew Y. Chin, Daniel L. Rumsey, Daniel A. Ehrlich, and David A. Hinkley The Aerospace Corporation
SSC12-II-1 Attitude Control on the Pico Satellite Solar Cell Testbed-2 Siegfried W. Janson, Brian S. Hardy, Andrew Y. Chin, Daniel L. Rumsey, Daniel A. Ehrlich, and David A. Hinkley The Aerospace Corporation
CADRE: DISTURBANCE MODEL
 CADRE: DISTURBANCE MODEL DUNCAN MILLER WINTER 2012 BACKGROUND The CubeSat Investigating Atmospheric Density Response to Extreme Driving (CADRE) is the next spacecraft mission under development at the University
CADRE: DISTURBANCE MODEL DUNCAN MILLER WINTER 2012 BACKGROUND The CubeSat Investigating Atmospheric Density Response to Extreme Driving (CADRE) is the next spacecraft mission under development at the University
Spinning Satellites Examples. ACS: Gravity Gradient. ACS: Single Spin
 Attitude Determination and Attitude Control Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky
Attitude Determination and Attitude Control Placing the telescope in orbit is not the end of the story. It is necessary to point the telescope towards the selected targets, or to scan the selected sky
Simulation Results of Alternative Methods for Formation Separation Control
 Simulation Results of Alternative Methods for Formation Separation Control Thomas Heine, Charles Bussy-Virat, Mark Moldwin, Aaron Ridley Department of Climate and Space Sciences and Engineering University
Simulation Results of Alternative Methods for Formation Separation Control Thomas Heine, Charles Bussy-Virat, Mark Moldwin, Aaron Ridley Department of Climate and Space Sciences and Engineering University
General Physics I. Lecture 10: Rolling Motion and Angular Momentum.
 General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
General Physics I Lecture 10: Rolling Motion and Angular Momentum Prof. WAN, Xin (万歆) 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Rolling motion of a rigid object: center-of-mass motion
Spacecraft Bus / Platform
 Spacecraft Bus / Platform Propulsion Thrusters ADCS: Attitude Determination and Control Subsystem Shield CDH: Command and Data Handling Subsystem Payload Communication Thermal Power Structure and Mechanisms
Spacecraft Bus / Platform Propulsion Thrusters ADCS: Attitude Determination and Control Subsystem Shield CDH: Command and Data Handling Subsystem Payload Communication Thermal Power Structure and Mechanisms
Linear Feedback Control Using Quasi Velocities
 Linear Feedback Control Using Quasi Velocities Andrew J Sinclair Auburn University, Auburn, Alabama 36849 John E Hurtado and John L Junkins Texas A&M University, College Station, Texas 77843 A novel approach
Linear Feedback Control Using Quasi Velocities Andrew J Sinclair Auburn University, Auburn, Alabama 36849 John E Hurtado and John L Junkins Texas A&M University, College Station, Texas 77843 A novel approach
Rotational Motion. Rotational Motion. Rotational Motion
 I. Rotational Kinematics II. Rotational Dynamics (Netwton s Law for Rotation) III. Angular Momentum Conservation 1. Remember how Newton s Laws for translational motion were studied: 1. Kinematics (x =
I. Rotational Kinematics II. Rotational Dynamics (Netwton s Law for Rotation) III. Angular Momentum Conservation 1. Remember how Newton s Laws for translational motion were studied: 1. Kinematics (x =
QUATERNION FEEDBACK ATTITUDE CONTROL DESIGN: A NONLINEAR H APPROACH
 Asian Journal of Control, Vol. 5, No. 3, pp. 406-4, September 003 406 Brief Paper QUAERNION FEEDBACK AIUDE CONROL DESIGN: A NONLINEAR H APPROACH Long-Life Show, Jyh-Ching Juang, Ying-Wen Jan, and Chen-zung
Asian Journal of Control, Vol. 5, No. 3, pp. 406-4, September 003 406 Brief Paper QUAERNION FEEDBACK AIUDE CONROL DESIGN: A NONLINEAR H APPROACH Long-Life Show, Jyh-Ching Juang, Ying-Wen Jan, and Chen-zung
Short note on the performances of Magnetic torquers (Magneto-torquers) MTQ
 MTQ") Eco-Kci-Me-085 Surprising Magnetic torquers 05docx 19/11/2017 Page 1 / 5 Short note on the performances of Magnetic torquers (Magneto-torquers) MTQ It will be shown that a surprising simple relation can
Eco-Kci-Me-085 Surprising Magnetic torquers 05docx 19/11/2017 Page 1 / 5 Short note on the performances of Magnetic torquers (Magneto-torquers) MTQ It will be shown that a surprising simple relation can
Simplified Analytical Model of a Six-Degree-of-Freedom Large-Gap Magnetic Suspension System
 NASA Technical Memorandum 112868 Simplified Analytical Model of a Six-Degree-of-Freedom Large-Gap Magnetic Suspension System Nelson J. Groom Langley Research Center, Hampton, Virginia June 1997 National
NASA Technical Memorandum 112868 Simplified Analytical Model of a Six-Degree-of-Freedom Large-Gap Magnetic Suspension System Nelson J. Groom Langley Research Center, Hampton, Virginia June 1997 National
Analytical Mechanics. of Space Systems. tfa AA. Hanspeter Schaub. College Station, Texas. University of Colorado Boulder, Colorado.
 Analytical Mechanics of Space Systems Third Edition Hanspeter Schaub University of Colorado Boulder, Colorado John L. Junkins Texas A&M University College Station, Texas AIM EDUCATION SERIES Joseph A.
Analytical Mechanics of Space Systems Third Edition Hanspeter Schaub University of Colorado Boulder, Colorado John L. Junkins Texas A&M University College Station, Texas AIM EDUCATION SERIES Joseph A.
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity
 2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
WEIGHTING MATRICES DETERMINATION USING POLE PLACEMENT FOR TRACKING MANEUVERS
 U.P.B. Sci. Bull., Series D, Vol. 75, Iss. 2, 2013 ISSN 1454-2358 WEIGHTING MATRICES DETERMINATION USING POLE PLACEMENT FOR TRACKING MANEUVERS Raluca M. STEFANESCU 1, Claudiu L. PRIOROC 2, Adrian M. STOICA
U.P.B. Sci. Bull., Series D, Vol. 75, Iss. 2, 2013 ISSN 1454-2358 WEIGHTING MATRICES DETERMINATION USING POLE PLACEMENT FOR TRACKING MANEUVERS Raluca M. STEFANESCU 1, Claudiu L. PRIOROC 2, Adrian M. STOICA
CHAPTER 4 CONVENTIONAL CONTROL FOR SATELLITE ATTITUDE
 93 CHAPTER 4 CONVENTIONAL CONTROL FOR SATELLITE ATTITUDE 4.1 INTRODUCTION Attitude control is the process of achieving and maintaining an orientation in space. The orientation control of a rigid body has
93 CHAPTER 4 CONVENTIONAL CONTROL FOR SATELLITE ATTITUDE 4.1 INTRODUCTION Attitude control is the process of achieving and maintaining an orientation in space. The orientation control of a rigid body has
PRATHAM IIT BOMBAY STUDENT SATELLITE. Critical Design Report Attitude Determination and Control System (ADCS) for Pratham
 for Pratham") PRATHAM IIT BOMBAY STUDENT SATELLITE Critical Design Report Attitude Determination and Control System (ADCS) for Pratham Indian Institute of Technology, Bombay 26 June, 2010 Chapter 1 Objectives of ADCS
PRATHAM IIT BOMBAY STUDENT SATELLITE Critical Design Report Attitude Determination and Control System (ADCS) for Pratham Indian Institute of Technology, Bombay 26 June, 2010 Chapter 1 Objectives of ADCS
Chapter 6: Momentum Analysis
 6-1 Introduction 6-2Newton s Law and Conservation of Momentum 6-3 Choosing a Control Volume 6-4 Forces Acting on a Control Volume 6-5Linear Momentum Equation 6-6 Angular Momentum 6-7 The Second Law of
6-1 Introduction 6-2Newton s Law and Conservation of Momentum 6-3 Choosing a Control Volume 6-4 Forces Acting on a Control Volume 6-5Linear Momentum Equation 6-6 Angular Momentum 6-7 The Second Law of
= 2 5 MR2. I sphere = MR 2. I hoop = 1 2 MR2. I disk
 A sphere (green), a disk (blue), and a hoop (red0, each with mass M and radius R, all start from rest at the top of an inclined plane and roll to the bottom. Which object reaches the bottom first? (Use
A sphere (green), a disk (blue), and a hoop (red0, each with mass M and radius R, all start from rest at the top of an inclined plane and roll to the bottom. Which object reaches the bottom first? (Use
CHAPTER 10 ROTATION OF A RIGID OBJECT ABOUT A FIXED AXIS WEN-BIN JIAN ( 簡紋濱 ) DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY
 DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY") CHAPTER 10 ROTATION OF A RIGID OBJECT ABOUT A FIXED AXIS WEN-BIN JIAN ( 簡紋濱 ) DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY OUTLINE 1. Angular Position, Velocity, and Acceleration 2. Rotational
CHAPTER 10 ROTATION OF A RIGID OBJECT ABOUT A FIXED AXIS WEN-BIN JIAN ( 簡紋濱 ) DEPARTMENT OF ELECTROPHYSICS NATIONAL CHIAO TUNG UNIVERSITY OUTLINE 1. Angular Position, Velocity, and Acceleration 2. Rotational
Design and Testing of Three-Axis Satellite Attitude Determination and Stabilization Systems. that are Based on Magnetic Sensing and Actuation
 Design and Testing of Three-Axis Satellite Attitude Determination and Stabilization Systems that are Based on Magnetic Sensing and Actuation Final Technical Report for AFOSR GRANT F4962-1-1-117 by Mark
Design and Testing of Three-Axis Satellite Attitude Determination and Stabilization Systems that are Based on Magnetic Sensing and Actuation Final Technical Report for AFOSR GRANT F4962-1-1-117 by Mark
Orbit Design Marcelo Suárez. 6th Science Meeting; Seattle, WA, USA July 2010
 Orbit Design Marcelo Suárez Orbit Design Requirements The following Science Requirements provided drivers for Orbit Design: Global Coverage: the entire extent (100%) of the ice-free ocean surface to at
Orbit Design Marcelo Suárez Orbit Design Requirements The following Science Requirements provided drivers for Orbit Design: Global Coverage: the entire extent (100%) of the ice-free ocean surface to at
Leonid Meteor Observer in LEO: A Proposal for a University Microsatellite for the 2001 Leonids
 Leonid Meteor Observer in LEO: A Proposal for a University Microsatellite for the 2001 Leonids Kazuya Yoshida* Hajime Yano** *Tohoku University **Institute of Space and Astronautical Science (ISAS) JAPAN
Leonid Meteor Observer in LEO: A Proposal for a University Microsatellite for the 2001 Leonids Kazuya Yoshida* Hajime Yano** *Tohoku University **Institute of Space and Astronautical Science (ISAS) JAPAN
FUZZY LOGIC CONTROL Vs. CONVENTIONAL PID CONTROL OF AN INVERTED PENDULUM ROBOT
 http:// FUZZY LOGIC CONTROL Vs. CONVENTIONAL PID CONTROL OF AN INVERTED PENDULUM ROBOT 1 Ms.Mukesh Beniwal, 2 Mr. Davender Kumar 1 M.Tech Student, 2 Asst.Prof, Department of Electronics and Communication
http:// FUZZY LOGIC CONTROL Vs. CONVENTIONAL PID CONTROL OF AN INVERTED PENDULUM ROBOT 1 Ms.Mukesh Beniwal, 2 Mr. Davender Kumar 1 M.Tech Student, 2 Asst.Prof, Department of Electronics and Communication
Lesson Rigid Body Dynamics
 Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
Lesson 8 Rigid Body Dynamics Lesson 8 Outline Problem definition and motivations Dynamics of rigid bodies The equation of unconstrained motion (ODE) User and time control Demos / tools / libs Rigid Body
3-D Kinetics of Rigid Bodies
 3-D Kinetics of Rigid Bodies Angular Momentum Generalized Newton s second law for the motion for a 3-D mass system Moment eqn for 3-D motion will be different than that obtained for plane motion Consider
3-D Kinetics of Rigid Bodies Angular Momentum Generalized Newton s second law for the motion for a 3-D mass system Moment eqn for 3-D motion will be different than that obtained for plane motion Consider
Constraint Based Control Method For Precision Formation Flight of Spacecraft AAS
 Constraint Based Control Method For Precision Formation Flight of Spacecraft AAS 06-122 Try Lam Jet Propulsion Laboratory California Institute of Technology Aaron Schutte Aerospace Corporation Firdaus
Constraint Based Control Method For Precision Formation Flight of Spacecraft AAS 06-122 Try Lam Jet Propulsion Laboratory California Institute of Technology Aaron Schutte Aerospace Corporation Firdaus
KINEMATIC EQUATIONS OF NONNOMINAL EULER AXIS/ANGLE ROTATION
 IAA-AAS-DyCoSS -14-10-01 KINEMATIC EQUATIONS OF NONNOMINAL EULER AXIS/ANGLE ROTATION Emanuele L. de Angelis and Fabrizio Giulietti INTRODUCTION Euler axis/angle is a useful representation in many attitude
IAA-AAS-DyCoSS -14-10-01 KINEMATIC EQUATIONS OF NONNOMINAL EULER AXIS/ANGLE ROTATION Emanuele L. de Angelis and Fabrizio Giulietti INTRODUCTION Euler axis/angle is a useful representation in many attitude
Gravity Probe B Data Analysis Challenges, Insights, and Results
 Gravity Probe B Data Analysis Challenges, Insights, and Results Mac Keiser April 15, 27 April 15, 27 Jacksonville, FL 1 Topics Data Analysis Strategy and Methods Challenges and Insights Trapped Magnetic
Gravity Probe B Data Analysis Challenges, Insights, and Results Mac Keiser April 15, 27 April 15, 27 Jacksonville, FL 1 Topics Data Analysis Strategy and Methods Challenges and Insights Trapped Magnetic
AERODYNAMIC ATTITUDE STABILIZATION FOR A RAM-FACING CUBESAT
 AAS 09-084 AERODYNAMIC ATTITUDE STABILIZATION FOR A RAM-FACING CUBESAT Samir Rawashdeh, * David Jones, Daniel Erb, * Anthony Karam, and James E. Lumpp, Jr. This paper describes the design, modeling, and
AAS 09-084 AERODYNAMIC ATTITUDE STABILIZATION FOR A RAM-FACING CUBESAT Samir Rawashdeh, * David Jones, Daniel Erb, * Anthony Karam, and James E. Lumpp, Jr. This paper describes the design, modeling, and
Physical Dynamics (PHY-304)
") Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
Physical Dynamics (PHY-304) Gabriele Travaglini March 31, 2012 1 Review of Newtonian Mechanics 1.1 One particle Lectures 1-2. Frame, velocity, acceleration, number of degrees of freedom, generalised coordinates.
A GRAVITY GRADIENT, MOMENTUM-BIASED ATTITUDE CONTROL SYSTEM FOR A CUBESAT. A Thesis. presented to
 A GRAVITY GRADIENT, MOMENTUM-BIASED ATTITUDE CONTROL SYSTEM FOR A CUBESAT A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements
A GRAVITY GRADIENT, MOMENTUM-BIASED ATTITUDE CONTROL SYSTEM FOR A CUBESAT A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements
ONE of the challenges in the design of attitude control
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1 Adaptive Sliding Mode Fault Tolerant Attitude Tracking Control for Flexible Spacecraft Under Actuator Saturation Bing Xiao, Qinglei Hu, Member, IEEE, YouminZhang,
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1 Adaptive Sliding Mode Fault Tolerant Attitude Tracking Control for Flexible Spacecraft Under Actuator Saturation Bing Xiao, Qinglei Hu, Member, IEEE, YouminZhang,
BravoSat: Optimizing the Delta-V Capability of a CubeSat Mission. with Novel Plasma Propulsion Technology ISSC 2013
 BravoSat: Optimizing the Delta-V Capability of a CubeSat Mission with Novel Plasma Propulsion Technology Sara Spangelo, NASA JPL, Caltech Benjamin Longmier, University of Michigan Interplanetary Small
BravoSat: Optimizing the Delta-V Capability of a CubeSat Mission with Novel Plasma Propulsion Technology Sara Spangelo, NASA JPL, Caltech Benjamin Longmier, University of Michigan Interplanetary Small