Methods and Tools. Average Operating Point Approach. To lump all engine operating points into one single average operating point.
|
|
|
- Carmella Hines
- 5 years ago
- Views:
Transcription
1 Methods and Tools Average Operating Point Approach To lump all engine operating points into one single average operating point. Used to estimate the fuel consumption Test cycle needs to be specified when doing estimation. Vehicle components: Fuel tank Engine Auxiliaries & cutch Gearbox Wheel(vehicle)
2 Fuel power P f = m where f H m f l fuel mass flow, H l fuel's heating value (e.g.10kwh/l for diesel) Vehicle Power P v i. e. P v = η η η P g g a a e = η η η m η η e f f H where efficiencies η g a e gear box, l - auxiliaries and cluch, engine Fuel mass flow m f Pv = η η η H g a e l This approach is to calculate an estimate of fuel consumption.
3 Courtesy L.Guzzella
4 Low torque: Low efficiency Courtesy L.Guzzella
5 Quasi-static Approach Vehicle is assumed to have constant inputs: Speed v Acceleration a Road gradient α Force F t acting on the wheel is calculated with vehicle s main parameters A, c, c, m f d r v Quasi-static approach is the average operating point approach on many intervals t [( i 1) h, ih], i=1,2,. h=1 second in MVEG-95 and PTF-75
6 ( ) i v i v r i d i a i v t,i i g i r i a i v t,i i v i g i r i a t,i m g m g c v Ac m a F e i F F F m a F or m a F F F F α α ρ sin cos Law Using Newton's 2,,,,,, = = = + + Rotating parts can be included into v m. i.e. e w w w r r v v r r m where m m m Θ + Θ = + => γ This approach can be used to analyse fuel consumption of complex powertrain structures. l tract i i i t H E J v F h E = = Fuel consumption : demand: Energy,
7 In vehicle s deceleration, fuel cut-off limit is engine s resistance torque at certain speed e.g. 20 Nm at 600 rad/s. Power is from kinetic energy of vehicle.
8 ωei Modelling of Automotive Systems 8
9
10 3 Optimization Problems in minimizing fuel consumption in propulsion design Structural optimization Parameter optimization Control system optimization
11 IC Engine Propulsion System IC engine efficiency ωet η e = P where c e P c = m H l l enthalpy flow, H l fuel heating value
12 Normalized Engine Variables Mean piston speed - mean speed over one revolution ωes cm = π where S-Strock Proof : Since 2S = c m 2π, ω e therefore c m ωes = π Typical less than 20m/s
13 Normalized Engine Variables Mean effective pressure Nπ Te pme = V where p me V d V d d engine's displacement. For 4 stroke engine N = 4 Engine's displacement is the total volume of air/fuel mixture an engine can draw in during one complete engine cycle Proof : For a 4 stroke engine = 4π T e 4π Te pme = Vd Typical value 10 Bar. Turbocharged 20 Bar.
14 Normalized Engine Variables Engine Mechanical Power π 2 Pe = z B pmecm 16 where z number of cylinders, B cylinder bore proof :for 4 stroke engine P e = B z π 2 2 p 4 me c m = π z 16 B 2 p me c m
15 Engine efficiency Efficiency low with low power Efficiency low with low pressure Pme0 = mechanical loses. e indicated engine efficiency
16 Gearbox Models ω = γ ω T 1 2 = γ T 1 2
17 Selection of Gear Ratios The largest gear ratio is chosen to meet the towing requirements ( m g sinα ) r = γ T ( ω ) or γ = 1 where r ω = γ ω, e 4 = max 4 e,max ( ω ) wheel raduis. m,max max max sinα max 1 e,max The smallest gear ratio (4th) is chosen to meet the maximum speed γ v v mv gr T r w ω c v ω W S π ω or c m,max 2S can be found from P e e,max e 2π = = v v r max max w F max = v max mv gc r 2 ( v ) + ρ A c v max 1 2 a f d max
18 Gearbox Types Manual Automatic Transmission Continuously Variable Transmission (CVTs) It is often 2 γ 2 = γ γ 3 = γ γ 4 = γ
19 Selection of Gear Ratios The 5th gear ratio is chosen to meet fuel - economy optimization criteria such as, most frequenctly used city speed 50km/h
20 Traction Force and Vehicle Speed Road gradient
21 Power equation T ω 2 2 =ηgb 1 e where P 0, gb T ω P 0, gb ( ω ) e ( ωe ) is the power of gearbox required to idle at speed ωe
22 Energy transferred to the vehicle by clutch E c = 1 2 Θ v ω 2 w,0
23 Speed difference between clutch disks ω and clutch torque. Actuation input The clutch torque: T1 ( t) = T1,max ( ω) u( t) where ω = ω 1, e ω 1, gb
24 Fuel Consumption of IC Engine Power Trains Average Operating Point Method SmILE vehicle MVEG-95 cycle F tract = 210N P tract Ptractv 210N9.5m / s = = = 3.3kW tract t 0.6s tract Power input of the gearbox Ptract + P0, gb P = = η = gb Auxiliaries P aux = 0. 25kW 3.7kW Power in fuel required Pe Pf = ttract = 0.6( ) / 0.24 = 10kW η e ( t time fraction in traction mode)
25 Fuel required Pf V f = = H ρ l f 10,000W 43,000,000J / kg 0.75kg / l = l / s For average speed of 9.5m/s in MVEG - 95, the time = 100,000m/9.5s = 10526s For 100km, fuel consumption : l / s 10526s = 3.26l
26 QuasiStatic Simulation Toolbox QuasiStatic Simulation Toolbox provides a fast and simple estimation of the fuel consumption for many powertrain systems. Prerequisites For a user to work efficiently with the QSS toolbox: Users must be familiar with Matlab/Simulink Users must have a basic understanding of the physics and the design of powertrain systems.
27 What the QSS TB can do The QSS TB makes it possible for powertrain systems to be designed quickly and in a flexible manner and to calculate easily the fuel consumption of such systems. The QSS TB contains examples of a number of elements. Chapter 2 contains detailed descrip-tions of all these elements. Users with a good grasp of the "philosophy" behind the QSS TB (Sec. 1.2), who know the general structure of a QSS TB program (Sec. 3.1) and who have read the commentary in Section 3.2 below are well prepared, once they have gained a little experience, to readily design and include new elements of their own. The most efficient use of the QSS TB can be made once users fully understand the techniques required (i.e., the optimization routines) to integrate the toolbox with other programs. This allows a smooth integration with the functionality of Matlab and all its other toolboxes. Due to the extremely short CPU time it requires (i.e., on a regular PC, a speedup factor of 100 to 1000 for a conventional powertrain), a QSS model is ideally suited for the optimization of the fuel consumption under various control strategies.
28 What the QSS TB cannot do The quasistatic approach obviously is not suitable for the capture of dynamic phe-nomena, i.e. those adequately described by differential equations. There are numerical approaches better suited for the efficient solution of those problems. Typical examples of such problems are drivetrain ringing phenomena or the analysis of state events such as stickslip effects. The QSS TB could be used for the calculation of vehicle pollutant emis-sions as well. Due to the current lack of reliable and easily acquired data describing the physics with sufficient accuracy, this second version of the toolbox does not include these aspects.
29 Simulink examples: using QSS 1.Create a simple drive cycle consisting of a constant acceleration followed by a period at constant speed and finally a constant deceleration. Use the components in the QSS toolbox to calculate the torque required. Increase the car s mass by 25% and re-calculate. Estimate the increased power requirement. 2.The NEDC includes gear changes, while the FTP-75 is defined simply as a speed profile against. Identify the gear change speeds from the NEDC, and create a gear change profile for the FTP-75. Run the cycle with the same car parameters. Why are the fuel economy numbers different? 3.Identify a way (in QSS) of estimating the deceleration energy. [Hint you can identify this when the torque at the road wheels goes negative.] Estimate this braking energy flow for each of the two cycles. 4.Create a vehicle model using the components of QSS. Using the parameters supplied in the example, calculate and plot the torque requirement for the first 5 minutes of each of the NEDC (New European Drive Cycle) and the FTP-75 cycle.
30
31

32 Vehicle Example
33
34
35
36

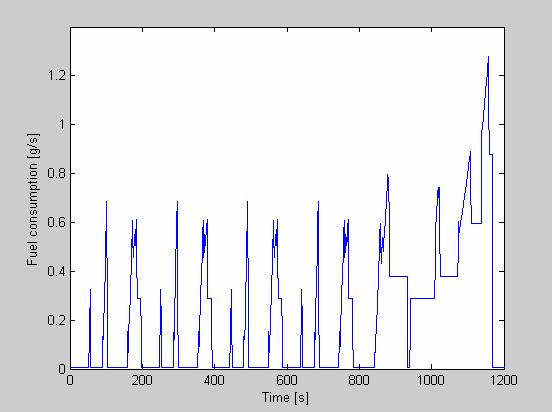
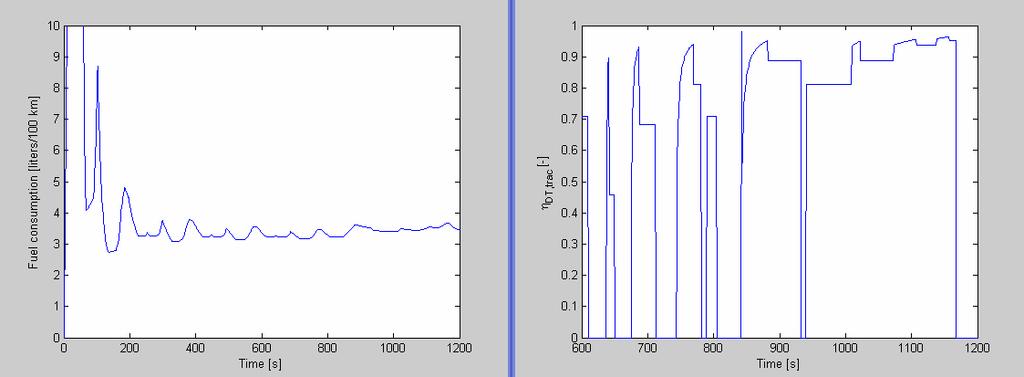
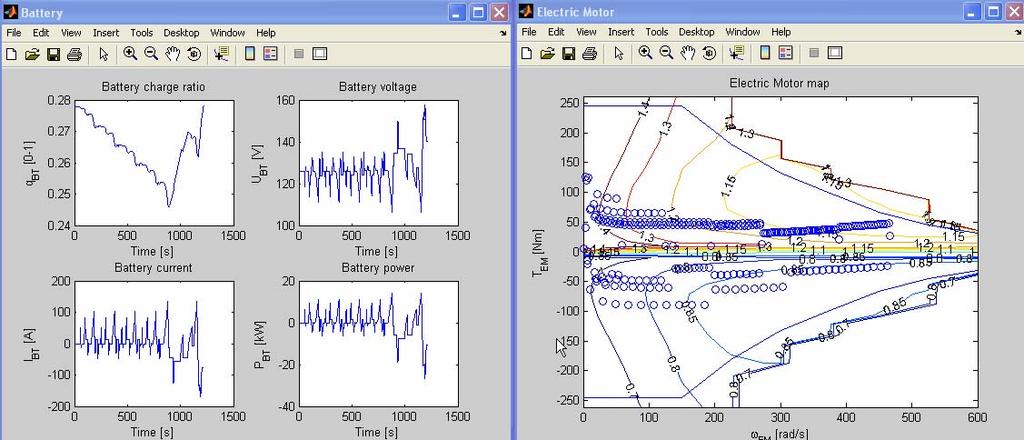
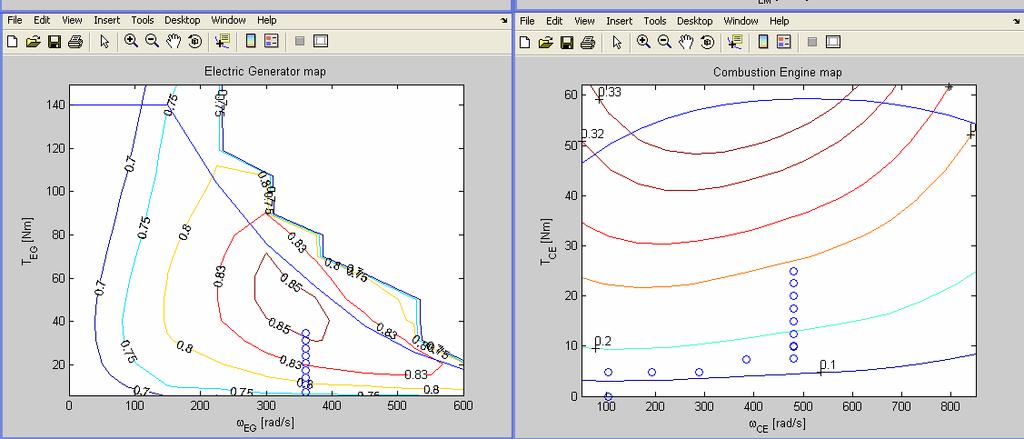
37 Hybrid Vehicle Example with a battery

38 Hybrid Vehicle Example With a supercapacitor. Hint: the output of a supercapacitor is voltage, different from the charge - the output of battery. Q = Idt, I = V / R
39
40
Vehicle Propulsion Systems. Tutorial Lecture on 22 nd of Dec.
 Vehicle Propulsion Systems Tutorial Lecture on 22 nd of Dec. Planning of Lectures and Exercises: Week Lecture, Friday, 8:15-10:00, ML F34 Book chp. 38, 22.9.2017 Introduction, goals, overview propulsion
Vehicle Propulsion Systems Tutorial Lecture on 22 nd of Dec. Planning of Lectures and Exercises: Week Lecture, Friday, 8:15-10:00, ML F34 Book chp. 38, 22.9.2017 Introduction, goals, overview propulsion
About the hand-in tasks. Vehicle Propulsion Systems Lecture 3. Outline. Energy System Overview. W2M Energy Paths. The Vehicle Motion Equation
 About the han-in tasks Vehicle Propulsion Systems Lecture 3 Conventional Powertrains with Transmission Performance, Tools an Optimization Lars Eriksson Professor Vehicular Systems Linköping University
About the han-in tasks Vehicle Propulsion Systems Lecture 3 Conventional Powertrains with Transmission Performance, Tools an Optimization Lars Eriksson Professor Vehicular Systems Linköping University
Vehicle Propulsion Systems. Electric & Hybrid Electric Propulsion Systems Part III
 Vehicle Propulsion Systems Electric & Hybrid Electric Propulsion Systems Part III 1 Planning of Lectures and Exercises: Week Lecture, Friday, 8:15-10:00, ML F34 Book chp. 38, 21.09.2018 Introduction, goals,
Vehicle Propulsion Systems Electric & Hybrid Electric Propulsion Systems Part III 1 Planning of Lectures and Exercises: Week Lecture, Friday, 8:15-10:00, ML F34 Book chp. 38, 21.09.2018 Introduction, goals,
Outline. Vehicle Propulsion Systems Lecture 6. Hybrid Electrical Vehicles Serial. Hybrid Electrical Vehicles Parallel
 Vehicle Propulsion Systems Lecture 6 Non Electric Hybri Propulsion Systems Lars Eriksson Associate Professor (Docent) Vehicular Systems Linköping University November 8, Pneumatic Hybri Engine Systems Case
Vehicle Propulsion Systems Lecture 6 Non Electric Hybri Propulsion Systems Lars Eriksson Associate Professor (Docent) Vehicular Systems Linköping University November 8, Pneumatic Hybri Engine Systems Case
Outline. Vehicle Propulsion Systems Vehicles as a hot topic is everlasting A diversity of powertrain configurations is appearing
 Lecture 1 Course ntrouction & Energy System Overview Lars Eriksson Professor Analyzing Energy Deman for a Vehicle Energy Deman of Driving Missions Vehicular Systems Linko ping University April 6, 2016
Lecture 1 Course ntrouction & Energy System Overview Lars Eriksson Professor Analyzing Energy Deman for a Vehicle Energy Deman of Driving Missions Vehicular Systems Linko ping University April 6, 2016
Transmission and Gear Shift calculation in VECTO
 Working Paper No. HDH-13-04e (13th HDH meeting, 21/22 March 2013) Transmission and Gear Shift calculation in VECTO (European Tool for HDV CO2 testing) Stefan Hausberger, Martin Rexeis, Raphael Luz Borlaenge,
Working Paper No. HDH-13-04e (13th HDH meeting, 21/22 March 2013) Transmission and Gear Shift calculation in VECTO (European Tool for HDV CO2 testing) Stefan Hausberger, Martin Rexeis, Raphael Luz Borlaenge,
Real-time energy management of the Volvo V60 PHEV based on a closed-form minimization of the Hamiltonian
 Real-time energy management of the Volvo V6 PHEV based on a closed-form minimization of the Hamiltonian Viktor Larsson 1, Lars Johannesson 1, Bo Egardt 1 Andreas Karlsson 2, Anders Lasson 2 1 Department
Real-time energy management of the Volvo V6 PHEV based on a closed-form minimization of the Hamiltonian Viktor Larsson 1, Lars Johannesson 1, Bo Egardt 1 Andreas Karlsson 2, Anders Lasson 2 1 Department
Problem 1 (Willans Approximation)
") 5-0567-00 Engine Systems (HS 205) Exercise 3 Topic: Lectures 3+4 Raffi Hedinger (hraffael@ethz.ch), Norbert Zsiga (nzsiga@ethz.ch); October 9, 205 Problem (Willans Approximation) A useful simplification
5-0567-00 Engine Systems (HS 205) Exercise 3 Topic: Lectures 3+4 Raffi Hedinger (hraffael@ethz.ch), Norbert Zsiga (nzsiga@ethz.ch); October 9, 205 Problem (Willans Approximation) A useful simplification
Modeling a powertrain in Simscape in a modular vehicle component model library. Stuttgart, , MBtech, Jörn Bader
 Modeling a powertrain in Simscape in a modular vehicle component model library Stuttgart, 24.09.2015, MBtech, Jörn Bader Contents { Introduction initial situation { Driving performance and consumption
Modeling a powertrain in Simscape in a modular vehicle component model library Stuttgart, 24.09.2015, MBtech, Jörn Bader Contents { Introduction initial situation { Driving performance and consumption
Problem Solutions. Vehicle Energy and Fuel Consumption. Vehicle Energy Losses and Performance Analysis. Problem 2.1
 Problem Solutions Vehicle Energy and Fuel Consumption Vehicle Energy Losses and Performance Analysis Problem 2.1 For a vehicle with m v = 1500 kg, A f c d = 0.7m 2, c r = 0.012, a vehicle speed v = 120km/h
Problem Solutions Vehicle Energy and Fuel Consumption Vehicle Energy Losses and Performance Analysis Problem 2.1 For a vehicle with m v = 1500 kg, A f c d = 0.7m 2, c r = 0.012, a vehicle speed v = 120km/h
HEV Optimization. Ganesh Balasubramanian Grad. Berrin Daran Grad. Sambasivan Subramanian Grad. Cetin Yilmaz Grad.
 HEV Optimization By Ganesh Balasubramanian Grad. Berrin Daran Grad. Sambasivan Subramanian Grad. Cetin Yilmaz Grad. ME 555 01-5 Winter 2001 Final Report Abstract The design project is the optimization
HEV Optimization By Ganesh Balasubramanian Grad. Berrin Daran Grad. Sambasivan Subramanian Grad. Cetin Yilmaz Grad. ME 555 01-5 Winter 2001 Final Report Abstract The design project is the optimization
Powertrain Systems of the Future
 25 Powertrain Systems of the Future Engine, transmission and damper systems for downspeeding, downsizing, and cylinder deactivation F T O I E O H O I O O A N G A D F J G I O J E R U I N K O P O A N G A
25 Powertrain Systems of the Future Engine, transmission and damper systems for downspeeding, downsizing, and cylinder deactivation F T O I E O H O I O O A N G A D F J G I O J E R U I N K O P O A N G A
Vehicle Propulsion Systems. Lecture 8 Electric & Hybrid Electric Propulsion Systems Part II
 Vehicle Propulsion Systems Lecture 8 Electric & Hybrid Electric Propulsion Systems Part II 1 Planning of Lectures and Exercises: Week Lecture, Friday, 8:15-10:00, ML F34 Book chp. 38, 21.09.2018 Introduction,
Vehicle Propulsion Systems Lecture 8 Electric & Hybrid Electric Propulsion Systems Part II 1 Planning of Lectures and Exercises: Week Lecture, Friday, 8:15-10:00, ML F34 Book chp. 38, 21.09.2018 Introduction,
Electric Vehicle Performance Power and Efficiency
 Electric Vehicle Performance Power and Efficiency 1 Assignment a) Examine measurement guide and electric vehicle (EV) arrangement. b) Drive the route according to teacher s instruction and download measured
Electric Vehicle Performance Power and Efficiency 1 Assignment a) Examine measurement guide and electric vehicle (EV) arrangement. b) Drive the route according to teacher s instruction and download measured
P3 Revision Questions
 P3 Revision Questions Part 1 Question 1 What is a kilometre? Answer 1 1000metres Question 2 What is meant by an average speed? Answer 2 The average distance covered per second Question 3 How do speed cameras
P3 Revision Questions Part 1 Question 1 What is a kilometre? Answer 1 1000metres Question 2 What is meant by an average speed? Answer 2 The average distance covered per second Question 3 How do speed cameras
Energy Management Strategies for Vehicle Power Nets
 Energy Management Strategies for Vehicle Power Nets Michiel Koot, Bram de Jager Department of Mechanical Engineering Technische Universiteit Eindhoven P.O. Box 513, 56 MB Eindhoven The Netherlands M.W.T.Koot@tue.nl
Energy Management Strategies for Vehicle Power Nets Michiel Koot, Bram de Jager Department of Mechanical Engineering Technische Universiteit Eindhoven P.O. Box 513, 56 MB Eindhoven The Netherlands M.W.T.Koot@tue.nl
Optimal control of engine controlled gearshift for a diesel-electric powertrain with backlash
 Optimal control of engine controlled gearshift for a diesel-electric powertrain with backlash V. Nezhadali L. Eriksson Vehicular Systems, Electrical Engineering Department, Linköping University, SE-58
Optimal control of engine controlled gearshift for a diesel-electric powertrain with backlash V. Nezhadali L. Eriksson Vehicular Systems, Electrical Engineering Department, Linköping University, SE-58
Electric Driving without Range Anxiety
 412 413 Electric Driving without Range Anxiety N O D H I O E A S M I O u e n l O A N G A D F J G I O J E R U I N K O P J E W L S P N Z A D F T O I Schaeffler s E O H O I O Orange-extender A N G A D F J
412 413 Electric Driving without Range Anxiety N O D H I O E A S M I O u e n l O A N G A D F J G I O J E R U I N K O P J E W L S P N Z A D F T O I Schaeffler s E O H O I O Orange-extender A N G A D F J
CHAPTER 8: ROTATIONAL OF RIGID BODY PHYSICS. 1. Define Torque
 7 1. Define Torque 2. State the conditions for equilibrium of rigid body (Hint: 2 conditions) 3. Define angular displacement 4. Define average angular velocity 5. Define instantaneous angular velocity
7 1. Define Torque 2. State the conditions for equilibrium of rigid body (Hint: 2 conditions) 3. Define angular displacement 4. Define average angular velocity 5. Define instantaneous angular velocity
OUTCOME 1 MECHANICAL POWER TRANSMISSION SYSTEMS TUTORIAL 3 FLYWHEELS. On completion of this short tutorial you should be able to do the following.
 Unit 60: Dynamics of Machines Unit code: H/60/4 QCF Level:4 Credit value:5 OUTCOME MECHANCAL POWER TRANSMSSON SYSTEMS TUTORAL 3 FLYWHEELS. Be able to determine the kinetic and dynamic parameters of mechanical
Unit 60: Dynamics of Machines Unit code: H/60/4 QCF Level:4 Credit value:5 OUTCOME MECHANCAL POWER TRANSMSSON SYSTEMS TUTORAL 3 FLYWHEELS. Be able to determine the kinetic and dynamic parameters of mechanical
Single-track models of an A-double heavy vehicle combination
 Single-track models of an A-double heavy vehicle combination PETER NILSSON KRISTOFFER TAGESSON Department of Applied Mechanics Division of Vehicle Engineering and Autonomous Systems Vehicle Dynamics Group
Single-track models of an A-double heavy vehicle combination PETER NILSSON KRISTOFFER TAGESSON Department of Applied Mechanics Division of Vehicle Engineering and Autonomous Systems Vehicle Dynamics Group
Kinematics, Dynamics, and Vibrations FE Review Session. Dr. David Herrin March 27, 2012
 Kinematics, Dynamics, and Vibrations FE Review Session Dr. David Herrin March 7, 0 Example A 0 g ball is released vertically from a height of 0 m. The ball strikes a horizontal surface and bounces back.
Kinematics, Dynamics, and Vibrations FE Review Session Dr. David Herrin March 7, 0 Example A 0 g ball is released vertically from a height of 0 m. The ball strikes a horizontal surface and bounces back.
Team-Exercises for DGC 100 Modelica Course
 Team-Exercises for DGC 100 Modelica Course Hubertus Tummescheit United Technologies Research Center, East Hartford, CT 06108. November 4, 2003 Abstract This document is a preliminary version and is going
Team-Exercises for DGC 100 Modelica Course Hubertus Tummescheit United Technologies Research Center, East Hartford, CT 06108. November 4, 2003 Abstract This document is a preliminary version and is going
b) What does each letter (or symbol) stand for in this equation? c) What are the corresponding SI units? (Write: symbol $ unit).
 What does each letter (or symbol) stand for in this equation? c) What are the corresponding SI units? (Write: symbol $ unit).") First Name: Last Name: 1. a) What is Newton s Second Law in formula form? b) What does each letter (or symbol) stand for in this equation? c) What are the corresponding SI units? (Write: symbol $ unit).
First Name: Last Name: 1. a) What is Newton s Second Law in formula form? b) What does each letter (or symbol) stand for in this equation? c) What are the corresponding SI units? (Write: symbol $ unit).
UNIT I Basic concepts and Work & Heat Transfer
 SIDDHARTH GROUP OF INSTITUTIONS :: PUTTUR Siddharth Nagar, Narayanavanam Road 517583 QUESTION BANK (DESCRIPTIVE) Subject with Code: Engineering Thermodynamics (16ME307) Year & Sem: II-B. Tech & II-Sem
SIDDHARTH GROUP OF INSTITUTIONS :: PUTTUR Siddharth Nagar, Narayanavanam Road 517583 QUESTION BANK (DESCRIPTIVE) Subject with Code: Engineering Thermodynamics (16ME307) Year & Sem: II-B. Tech & II-Sem
1. Replace the given system of forces acting on a body as shown in figure 1 by a single force and couple acting at the point A.
 Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D225 TUTORIAL 4 MOMENT OF INERTIA. On completion of this tutorial you should be able to
 ENGINEEING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D5 TUTOIAL 4 MOMENT OF INETIA On completion of this tutorial you should be able to evise angular motion. Define and derive the moment of inertia of a body.
ENGINEEING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D5 TUTOIAL 4 MOMENT OF INETIA On completion of this tutorial you should be able to evise angular motion. Define and derive the moment of inertia of a body.
CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems
 R. M. Murray Fall 2004 CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems CDS 101/110 Homework Set #2 Issued: 4 Oct 04 Due: 11 Oct 04 Note: In the upper left hand corner of the first page
R. M. Murray Fall 2004 CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems CDS 101/110 Homework Set #2 Issued: 4 Oct 04 Due: 11 Oct 04 Note: In the upper left hand corner of the first page
IMPACT OF ROAD SURFACE ROUGHNESS AND ENGINE TORQUE ON THE LOAD OF AUTOMOTIVE TRANSMISSION SYSTEM
 International Journal of echanical Engineering and Technology (IJET) Volume 10, Issue 02, February 2019, pp. 1752 1761, Article ID: IJET_10_02_181 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijet&vtype=10&itype=2
International Journal of echanical Engineering and Technology (IJET) Volume 10, Issue 02, February 2019, pp. 1752 1761, Article ID: IJET_10_02_181 Available online at http://www.iaeme.com/ijmet/issues.asp?jtype=ijet&vtype=10&itype=2
Study Effect of Pads shapes on Temperature Distribution for Disc Brake Contact Surface
 International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 8, Issue 9 (September 2013), PP. 62-67 Study Effect of Pads shapes on Temperature
International Journal of Engineering Research and Development e-issn: 2278-067X, p-issn: 2278-800X, www.ijerd.com Volume 8, Issue 9 (September 2013), PP. 62-67 Study Effect of Pads shapes on Temperature
Objectives. Power in Translational Systems 298 CHAPTER 6 POWER
 Objectives Explain the relationship between power and work. Explain the relationship between power, force, and speed for an object in translational motion. Calculate a device s efficiency in terms of the
Objectives Explain the relationship between power and work. Explain the relationship between power, force, and speed for an object in translational motion. Calculate a device s efficiency in terms of the
Mechanics II. Which of the following relations among the forces W, k, N, and F must be true?
 Mechanics II 1. By applying a force F on a block, a person pulls a block along a rough surface at constant velocity v (see Figure below; directions, but not necessarily magnitudes, are indicated). Which
Mechanics II 1. By applying a force F on a block, a person pulls a block along a rough surface at constant velocity v (see Figure below; directions, but not necessarily magnitudes, are indicated). Which
ME Thermodynamics I
 HW-03 (25 points) i) Given: for writing Given, Find, Basic equations Rigid tank containing nitrogen gas in two sections initially separated by a membrane. Find: Initial density (kg/m3) of nitrogen gas
HW-03 (25 points) i) Given: for writing Given, Find, Basic equations Rigid tank containing nitrogen gas in two sections initially separated by a membrane. Find: Initial density (kg/m3) of nitrogen gas
ET3-7: Modelling I(V) Introduction and Objectives. Electrical, Mechanical and Thermal Systems
 Introduction and Objectives. Electrical, Mechanical and Thermal Systems") ET3-7: Modelling I(V) Introduction and Objectives Electrical, Mechanical and Thermal Systems Objectives analyse and model basic linear dynamic systems -Electrical -Mechanical -Thermal Recognise the analogies
ET3-7: Modelling I(V) Introduction and Objectives Electrical, Mechanical and Thermal Systems Objectives analyse and model basic linear dynamic systems -Electrical -Mechanical -Thermal Recognise the analogies
PLANAR KINETICS OF A RIGID BODY: WORK AND ENERGY Today s Objectives: Students will be able to: 1. Define the various ways a force and couple do work.
 PLANAR KINETICS OF A RIGID BODY: WORK AND ENERGY Today s Objectives: Students will be able to: 1. Define the various ways a force and couple do work. In-Class Activities: 2. Apply the principle of work
PLANAR KINETICS OF A RIGID BODY: WORK AND ENERGY Today s Objectives: Students will be able to: 1. Define the various ways a force and couple do work. In-Class Activities: 2. Apply the principle of work
Parameter Prediction and Modelling Methods for Traction Motor of Hybrid Electric Vehicle
 Page 359 World Electric Vehicle Journal Vol. 3 - ISSN 232-6653 - 29 AVERE Parameter Prediction and Modelling Methods for Traction Motor of Hybrid Electric Vehicle Tao Sun, Soon-O Kwon, Geun-Ho Lee, Jung-Pyo
Page 359 World Electric Vehicle Journal Vol. 3 - ISSN 232-6653 - 29 AVERE Parameter Prediction and Modelling Methods for Traction Motor of Hybrid Electric Vehicle Tao Sun, Soon-O Kwon, Geun-Ho Lee, Jung-Pyo
Motor Info on the WWW Motorola Motors DC motor» /MOTORDCTUT.
 Motor Info on the WWW Motorola Motors DC motor» http://www.freescale.com/files/microcontrollers/doc/train_ref_material /MOTORDCTUT.html Brushless DC motor» http://www.freescale.com/files/microcontrollers/doc/train_ref_material
Motor Info on the WWW Motorola Motors DC motor» http://www.freescale.com/files/microcontrollers/doc/train_ref_material /MOTORDCTUT.html Brushless DC motor» http://www.freescale.com/files/microcontrollers/doc/train_ref_material
General Definition of Torque, final. Lever Arm. General Definition of Torque 7/29/2010. Units of Chapter 10
 Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
Units of Chapter 10 Determining Moments of Inertia Rotational Kinetic Energy Rotational Plus Translational Motion; Rolling Why Does a Rolling Sphere Slow Down? General Definition of Torque, final Taking
PHYA5/2C. (JUN15PHYA52C01) WMP/Jun15/PHYA5/2C/E5. General Certificate of Education Advanced Level Examination June Section B PMT TOTAL
 WMP/Jun15/PHYA5/2C/E5. General Certificate of Education Advanced Level Examination June Section B PMT TOTAL") Centre Number Candidate Number For Examiner s Use Surname Other Names Candidate Signature Examiner s Initials General Certificate of Education Advanced Level Examination June 2015 Question 1 2 Mark Physics
Centre Number Candidate Number For Examiner s Use Surname Other Names Candidate Signature Examiner s Initials General Certificate of Education Advanced Level Examination June 2015 Question 1 2 Mark Physics
Exp All technology at operator s service. Suggested Orange peel. Straight boom m. Industrial straight stick 8.00 m RV 600 2,
 Exp 5055 Exp 5055 All technology at operator s service 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 20 19 18 17 16 15 14 13 12 11 10 8 9 7 6
Exp 5055 Exp 5055 All technology at operator s service 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 20 19 18 17 16 15 14 13 12 11 10 8 9 7 6
Answers to Exercises C mm mm mm mm cm mm mm mm
 Answers to Exercises CHAPTER 1 Exercises 1.1 (p. 19) 1. 0.4 cm 6. 4.8 kn, 0.743 mm 2. 10.5 cm, 12.3 cm 7. 200 GN/m2 3. (Descriptive) 8. 38.4 kn 4. 1.65 mm 9. 12.15 cm; 1.2 kn/cm 5. 48.25 N, 11.97 cm 10.
Answers to Exercises CHAPTER 1 Exercises 1.1 (p. 19) 1. 0.4 cm 6. 4.8 kn, 0.743 mm 2. 10.5 cm, 12.3 cm 7. 200 GN/m2 3. (Descriptive) 8. 38.4 kn 4. 1.65 mm 9. 12.15 cm; 1.2 kn/cm 5. 48.25 N, 11.97 cm 10.
Extending the Inverse Vehicle Propulsion Simulation Concept -To Improve Simulation Performance
 Linköping Studies in Science and Technology Thesis No. 1181 Extending the Inverse Vehicle Propulsion Simulation Concept -To Improve Simulation Performance Anders Fröberg Department of Electrical Engineering
Linköping Studies in Science and Technology Thesis No. 1181 Extending the Inverse Vehicle Propulsion Simulation Concept -To Improve Simulation Performance Anders Fröberg Department of Electrical Engineering
HCTL Open Int. J. of Technology Innovations and Research HCTL Open IJTIR, Volume 3, May 2013 e-issn: ISBN (Print):
:") Computation of Power of a Motor in Electric Vehicle under City Traffic and Dynamic Conditions vikas@cpdm.iisc.ernet.in Abstract In this paper author used a novel method to calculate the power of a motor
Computation of Power of a Motor in Electric Vehicle under City Traffic and Dynamic Conditions vikas@cpdm.iisc.ernet.in Abstract In this paper author used a novel method to calculate the power of a motor
Analysis and Design of an Electric Vehicle using Matlab and Simulink
 Analysis and Design of an Electric Vehicle using Matlab and Simulink Advanced Support Group January 22, 29 23-27: University of Michigan Research: Optimal System Partitioning and Coordination Original
Analysis and Design of an Electric Vehicle using Matlab and Simulink Advanced Support Group January 22, 29 23-27: University of Michigan Research: Optimal System Partitioning and Coordination Original
Analysis of modelling and simulation methodologies for vehicular propulsion systems. Theo Hofman, Dennis van Leeuwen and Maarten Steinbuch
 Int. J. Powertrains, Vol. 1, No. 2, 2011 117 Analysis of modelling and simulation methodologies for vehicular propulsion systems Theo Hofman, Dennis van Leeuwen and Maarten Steinbuch Control Systems Technology
Int. J. Powertrains, Vol. 1, No. 2, 2011 117 Analysis of modelling and simulation methodologies for vehicular propulsion systems Theo Hofman, Dennis van Leeuwen and Maarten Steinbuch Control Systems Technology
Homework Assignment 2 Modeling a Drivetrain Model Accuracy Due: Friday, September 16, 2005
 ME 2016 Sections A-B-C-D Fall Semester 2005 Computing Techniques 3-0-3 Homework Assignment 2 Modeling a Drivetrain Model Accuracy Due: Friday, September 16, 2005 Description and Outcomes In this assignment,
ME 2016 Sections A-B-C-D Fall Semester 2005 Computing Techniques 3-0-3 Homework Assignment 2 Modeling a Drivetrain Model Accuracy Due: Friday, September 16, 2005 Description and Outcomes In this assignment,
Fuel and Air Flow in the Cylinder
 Chapter 6 Fuel and Air Flow in the Cylinder 6.1) A four cylinder four stroke 3.0 L port-injected spark ignition engine is running at 00 rpm on a stoichiometric mix of octane and standard air at 100 kpa
Chapter 6 Fuel and Air Flow in the Cylinder 6.1) A four cylinder four stroke 3.0 L port-injected spark ignition engine is running at 00 rpm on a stoichiometric mix of octane and standard air at 100 kpa
RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5)
") RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5) Today s Objectives: Students will be able to: a) Describe the velocity of a rigid body in terms of translation and rotation components. b) Perform a relative-motion
RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5) Today s Objectives: Students will be able to: a) Describe the velocity of a rigid body in terms of translation and rotation components. b) Perform a relative-motion
Midterm 3 Review (Ch 9-14)
") Midterm 3 Review (Ch 9-14) PowerPoint Lectures for University Physics, Twelfth Edition Hugh D. Young and Roger A. Freedman Lectures by James Pazun Copyright 2008 Pearson Education Inc., publishing as Pearson
Midterm 3 Review (Ch 9-14) PowerPoint Lectures for University Physics, Twelfth Edition Hugh D. Young and Roger A. Freedman Lectures by James Pazun Copyright 2008 Pearson Education Inc., publishing as Pearson
ENGINE TORQUE FOR ACCELERATION OF ROTATIONAL MASS IN VEHICLES
 Journal of KONES Powertrain and Transport, Vol. 17, No. 4 010 ENGINE TORQUE FOR ACCELERATION OF ROTATIONAL MASS IN VEHICLES Aleksander Ubysz Silesian Technical University, Faculty of Transport, Department
Journal of KONES Powertrain and Transport, Vol. 17, No. 4 010 ENGINE TORQUE FOR ACCELERATION OF ROTATIONAL MASS IN VEHICLES Aleksander Ubysz Silesian Technical University, Faculty of Transport, Department
(c) curved track. direction of motion Fig. 1.2 State the effect that this force has on the motion... (iii) ... State how this force is provided. ...
 curved track. direction of motion Fig. 1.2 State the effect that this force has on the motion... (iii) ... State how this force is provided. ...") 2 (c) As the train is driven round the bend, there is an extra force acting, called the centripetal force. (i) On Fig. 1.2, draw an arrow to show the direction of this force. train curved track direction
2 (c) As the train is driven round the bend, there is an extra force acting, called the centripetal force. (i) On Fig. 1.2, draw an arrow to show the direction of this force. train curved track direction
(a) (i) There is a lift inside the building. The lift travels at a mean velocity of 10 m/s.
 (i) There is a lift inside the building. The lift travels at a mean velocity of 10 m/s.") Q. The world s tallest building is in Dubai. By Nicolas Lannuzel [CC BY-SA 2.0], via Flickr (a) (i) There is a lift inside the building. The lift travels at a mean velocity of 0 m/s. When the lift is carrying
Q. The world s tallest building is in Dubai. By Nicolas Lannuzel [CC BY-SA 2.0], via Flickr (a) (i) There is a lift inside the building. The lift travels at a mean velocity of 0 m/s. When the lift is carrying
Exercise 8 - Turbocompressors
 Exercise 8 - Turbocompressors A turbocompressor TC) or turbocharger is a mechanical device used in internal combustion engines to enhance their power output. The basic idea of a TC is to force additional
Exercise 8 - Turbocompressors A turbocompressor TC) or turbocharger is a mechanical device used in internal combustion engines to enhance their power output. The basic idea of a TC is to force additional
Comparison of two Real-Time Predictive Strategies for the Optimal Energy Management of a Hybrid Electric Vehicle
 E-COSM Rencontres Scientifiques de l IFP 2-4 Octobre 26, Proceedings, pp. 3 Copyright c 26, Institut Francais du Petrole Comparison of two Real-Time Predictive Strategies for the Optimal Energy Management
E-COSM Rencontres Scientifiques de l IFP 2-4 Octobre 26, Proceedings, pp. 3 Copyright c 26, Institut Francais du Petrole Comparison of two Real-Time Predictive Strategies for the Optimal Energy Management
GM VOLT PERFORMANCE SIMULATION
 GM Volt - Vehicle, Motor, Road, and Enironmental Parameters: Enable Generator Only Mode Gear Ratio, Inefficiencies: GR 8 η Max Motor Power: Power max 111 kw.9 axle.9 Battery Energy: Energy P Generator
GM Volt - Vehicle, Motor, Road, and Enironmental Parameters: Enable Generator Only Mode Gear Ratio, Inefficiencies: GR 8 η Max Motor Power: Power max 111 kw.9 axle.9 Battery Energy: Energy P Generator
PLANAR RIGID BODY MOTION: TRANSLATION &
 PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
Lecture 10. Example: Friction and Motion
 Lecture 10 Goals: Exploit Newton s 3 rd Law in problems with friction Employ Newton s Laws in 2D problems with circular motion Assignment: HW5, (Chapter 7, due 2/24, Wednesday) For Tuesday: Finish reading
Lecture 10 Goals: Exploit Newton s 3 rd Law in problems with friction Employ Newton s Laws in 2D problems with circular motion Assignment: HW5, (Chapter 7, due 2/24, Wednesday) For Tuesday: Finish reading
Rigid Body Kinetics :: Virtual Work
 Rigid Body Kinetics :: Virtual Work Work-energy relation for an infinitesimal displacement: du = dt + dv (du :: total work done by all active forces) For interconnected systems, differential change in
Rigid Body Kinetics :: Virtual Work Work-energy relation for an infinitesimal displacement: du = dt + dv (du :: total work done by all active forces) For interconnected systems, differential change in
State the condition under which the distance covered and displacement of moving object will have the same magnitude.
 Exercise CBSE-Class IX Science Motion General Instructions: (i) (ii) (iii) (iv) Question no. 1-15 are very short answer questions. These are required to be answered in one sentence each. Questions no.
Exercise CBSE-Class IX Science Motion General Instructions: (i) (ii) (iii) (iv) Question no. 1-15 are very short answer questions. These are required to be answered in one sentence each. Questions no.
Thermodynamics I Spring 1432/1433H (2011/2012H) Saturday, Wednesday 8:00am - 10:00am & Monday 8:00am - 9:00am MEP 261 Class ZA
 Saturday, Wednesday 8:00am - 10:00am & Monday 8:00am - 9:00am MEP 261 Class ZA") Thermodynamics I Spring 1432/1433H (2011/2012H) Saturday, Wednesday 8:00am - 10:00am & Monday 8:00am - 9:00am MEP 261 Class ZA Dr. Walid A. Aissa Associate Professor, Mech. Engg. Dept. Faculty of Engineering
Thermodynamics I Spring 1432/1433H (2011/2012H) Saturday, Wednesday 8:00am - 10:00am & Monday 8:00am - 9:00am MEP 261 Class ZA Dr. Walid A. Aissa Associate Professor, Mech. Engg. Dept. Faculty of Engineering
Question Expected Answers Marks. energy, power and speed underlined. Scale diagram: correct triangle / parallelogram drawn on Fig. 1.
 1 (a)(i) (b) energy, power and speed underlined any error loses this mark vector has magnitude / size vector has a direction Scale diagram: correct triangle / parallelogram drawn on Fig. 1.1 scale stated
1 (a)(i) (b) energy, power and speed underlined any error loses this mark vector has magnitude / size vector has a direction Scale diagram: correct triangle / parallelogram drawn on Fig. 1.1 scale stated
Homework Assignment 4 Root Finding Algorithms The Maximum Velocity of a Car Due: Friday, February 19, 2010 at 12noon
 ME 2016 A Spring Semester 2010 Computing Techniques 3-0-3 Homework Assignment 4 Root Finding Algorithms The Maximum Velocity of a Car Due: Friday, February 19, 2010 at 12noon Description and Outcomes In
ME 2016 A Spring Semester 2010 Computing Techniques 3-0-3 Homework Assignment 4 Root Finding Algorithms The Maximum Velocity of a Car Due: Friday, February 19, 2010 at 12noon Description and Outcomes In
A Study on the Tube of Integral Propeller Shaft for the Rear-wheel Drive Automobile Using Carbon Composite Fiber
 A Study on the Tube of Integral Propeller Shaft for the Rear-wheel Drive Automobile Using Carbon Composite Fiber Kibong Han Mechatronics Department, Jungwon University, 85 Munmu-ro, Goesan-gun, South Korea.
A Study on the Tube of Integral Propeller Shaft for the Rear-wheel Drive Automobile Using Carbon Composite Fiber Kibong Han Mechatronics Department, Jungwon University, 85 Munmu-ro, Goesan-gun, South Korea.
Kinematics of. Motion. 8 l Theory of Machines
 8 l Theory of Machines Features 1. 1ntroduction.. Plane Motion. 3. Rectilinear Motion. 4. Curvilinear Motion. 5. Linear Displacement. 6. Linear Velocity. 7. Linear Acceleration. 8. Equations of Linear
8 l Theory of Machines Features 1. 1ntroduction.. Plane Motion. 3. Rectilinear Motion. 4. Curvilinear Motion. 5. Linear Displacement. 6. Linear Velocity. 7. Linear Acceleration. 8. Equations of Linear
Dynamics Plane kinematics of rigid bodies Section 4: TJW Rotation: Example 1
 Section 4: TJW Rotation: Example 1 The pinion A of the hoist motor drives gear B, which is attached to the hoisting drum. The load L is lifted from its rest position and acquires an upward velocity of
Section 4: TJW Rotation: Example 1 The pinion A of the hoist motor drives gear B, which is attached to the hoisting drum. The load L is lifted from its rest position and acquires an upward velocity of
Torsional vibrations in truck powertrains with dual mass flywheel having piecewise linear stiffness
 Torsional vibrations in truck powertrains with dual mass flywheel having piecewise lineatiffness Lina Wramner Dement of Mechanics and Maritime Sciences at Chalmers University of Technology and Volvo Group
Torsional vibrations in truck powertrains with dual mass flywheel having piecewise lineatiffness Lina Wramner Dement of Mechanics and Maritime Sciences at Chalmers University of Technology and Volvo Group
CEE 271: Applied Mechanics II, Dynamics Lecture 27: Ch.18, Sec.1 5
 1 / 42 CEE 271: Applied Mechanics II, Dynamics Lecture 27: Ch.18, Sec.1 5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Tuesday, November 27, 2012 2 / 42 KINETIC
1 / 42 CEE 271: Applied Mechanics II, Dynamics Lecture 27: Ch.18, Sec.1 5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Tuesday, November 27, 2012 2 / 42 KINETIC
Electrical City Bus: Functional Safety through Driving Tests and Simulations
 Electrical City Bus: Functional Safety through Driving Tests and Simulations SAE 2017 Hybrid and Electric Vehicle Technologies Symposium Albert Tuertscher, Rolf Mueller, Tobias Oeser, Christian Gnandt
Electrical City Bus: Functional Safety through Driving Tests and Simulations SAE 2017 Hybrid and Electric Vehicle Technologies Symposium Albert Tuertscher, Rolf Mueller, Tobias Oeser, Christian Gnandt
Rotational Motion. Rotational Motion. Rotational Motion
 I. Rotational Kinematics II. Rotational Dynamics (Netwton s Law for Rotation) III. Angular Momentum Conservation 1. Remember how Newton s Laws for translational motion were studied: 1. Kinematics (x =
I. Rotational Kinematics II. Rotational Dynamics (Netwton s Law for Rotation) III. Angular Momentum Conservation 1. Remember how Newton s Laws for translational motion were studied: 1. Kinematics (x =
New GCSE 4473/02 ADDITIONAL SCIENCE HIGHER TIER PHYSICS 2
 Surname Centre Number Candidate Number Other Names 0 New GCSE 4473/02 ADDITIONAL SCIENCE HIGHER TIER PHYSICS 2 A.M. THURSDAY, 24 May 2012 1 hour ADDITIONAL MATERIALS In addition to this paper you may require
Surname Centre Number Candidate Number Other Names 0 New GCSE 4473/02 ADDITIONAL SCIENCE HIGHER TIER PHYSICS 2 A.M. THURSDAY, 24 May 2012 1 hour ADDITIONAL MATERIALS In addition to this paper you may require
Lab 3: Quanser Hardware and Proportional Control
 Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Projectile [86 marks]
![Projectile [86 marks]](/thumbs/89/99989096.jpg "Projectile [86 marks]") Projectile [86 marks] 1. An object is released from rest in the gravitational field of the Earth. Air resistance is negligible. How far does the object move during the fourth second of its motion? A. 15
Projectile [86 marks] 1. An object is released from rest in the gravitational field of the Earth. Air resistance is negligible. How far does the object move during the fourth second of its motion? A. 15
Rotational Motion and Torque
 Rotational Motion and Torque Introduction to Angular Quantities Sections 8- to 8-2 Introduction Rotational motion deals with spinning objects, or objects rotating around some point. Rotational motion is
Rotational Motion and Torque Introduction to Angular Quantities Sections 8- to 8-2 Introduction Rotational motion deals with spinning objects, or objects rotating around some point. Rotational motion is
Estimate, for this water, the specific heat capacity, specific heat capacity =... J kg 1 K 1. the specific latent heat of vaporisation.
 1 A kettle is rated as 2.3 kw. A mass of 750 g of water at 20 C is poured into the kettle. When the kettle is switched on, it takes 2.0 minutes for the water to start boiling. In a further 7.0 minutes,
1 A kettle is rated as 2.3 kw. A mass of 750 g of water at 20 C is poured into the kettle. When the kettle is switched on, it takes 2.0 minutes for the water to start boiling. In a further 7.0 minutes,
FRICTIONAL FORCES. Direction of frictional forces... (not always obvious)... CHAPTER 5 APPLICATIONS OF NEWTON S LAWS
... CHAPTER 5 APPLICATIONS OF NEWTON S LAWS") RICTIONAL ORCES CHAPTER 5 APPLICATIONS O NEWTON S LAWS rictional forces Static friction Kinetic friction Centripetal force Centripetal acceleration Loop-the-loop Drag force Terminal velocity Direction
RICTIONAL ORCES CHAPTER 5 APPLICATIONS O NEWTON S LAWS rictional forces Static friction Kinetic friction Centripetal force Centripetal acceleration Loop-the-loop Drag force Terminal velocity Direction
Automotive NVH Research Instrumentation and Infrastructure at UC-SDRL
 Automotive NVH Research Instrumentation and Infrastructure at UC-SDRL Teik C. Lim, Jay Kim, Randall Allemang Structural Dynamics Research Laboratory Mechanical, Industrial & Nuclear Engineering University
Automotive NVH Research Instrumentation and Infrastructure at UC-SDRL Teik C. Lim, Jay Kim, Randall Allemang Structural Dynamics Research Laboratory Mechanical, Industrial & Nuclear Engineering University
Diagnostic Measurement for the Effective Performance of Motor Vehicles
 Diagnostic Measurement for the Effective Performance of Motor Vehicles István Lakatos Széchenyi István University Department of Road and Rail Vehicle Egyetem tér 1, H-9026 Győr, Hungary lakatos@sze.hu
Diagnostic Measurement for the Effective Performance of Motor Vehicles István Lakatos Széchenyi István University Department of Road and Rail Vehicle Egyetem tér 1, H-9026 Győr, Hungary lakatos@sze.hu
MEI Mechanics 1. Applying Newton s second law along a line
 MEI Mechanics 1 Applying Newton s second law along a line Chapter assessment 1. (a) The following two questions are about the motion of a car of mass 1500 kg, travelling along a straight, horizontal road.
MEI Mechanics 1 Applying Newton s second law along a line Chapter assessment 1. (a) The following two questions are about the motion of a car of mass 1500 kg, travelling along a straight, horizontal road.
PHYSICS 221, FALL 2010 EXAM #1 Solutions WEDNESDAY, SEPTEMBER 29, 2010
 PHYSICS 1, FALL 010 EXAM 1 Solutions WEDNESDAY, SEPTEMBER 9, 010 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In
PHYSICS 1, FALL 010 EXAM 1 Solutions WEDNESDAY, SEPTEMBER 9, 010 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In
Motion in one dimension
 Work Sheet - 1 1. Define rest and motion. 2. Define distance and displacement. Write their S.I unit. 3. Distinguish between distance and displacement. Write five points of differences. Work Sheet - 2 1.
Work Sheet - 1 1. Define rest and motion. 2. Define distance and displacement. Write their S.I unit. 3. Distinguish between distance and displacement. Write five points of differences. Work Sheet - 2 1.
SOP Release. FEV Chassis Reliable Partner in Chassis Development. FEV Chassis Applications and Activities. Concept Layout. Design
 CHASSIS Reliable Partner in Chassis Development FEV Chassis Applications and Activities Founded in 1978, FEV is an internationally recognized leader in the design and development of internal combustion
CHASSIS Reliable Partner in Chassis Development FEV Chassis Applications and Activities Founded in 1978, FEV is an internationally recognized leader in the design and development of internal combustion
Emil Ritzén. Reg. nr: LiTH-ISY-EX
 Emil Ritzén Reg. nr: LiTH-ISY-EX-1883 1998-01-30 Department of Electrical Engineering Linköping University SE-581 83 Linköping, Sweden Linköpings Tekniska Högskola Institutionen för Systemteknik 581 83
Emil Ritzén Reg. nr: LiTH-ISY-EX-1883 1998-01-30 Department of Electrical Engineering Linköping University SE-581 83 Linköping, Sweden Linköpings Tekniska Högskola Institutionen för Systemteknik 581 83
MECH 3140 Final Project
 MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
Chapter 10: Dynamics of Rotational Motion
 Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
Chapter 10: Dynamics of Rotational Motion What causes an angular acceleration? The effectiveness of a force at causing a rotation is called torque. QuickCheck 12.5 The four forces shown have the same strength.
PHYSICS 221, FALL 2011 EXAM #2 SOLUTIONS WEDNESDAY, NOVEMBER 2, 2011
 PHYSICS 1, FALL 011 EXAM SOLUTIONS WEDNESDAY, NOVEMBER, 011 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In this
PHYSICS 1, FALL 011 EXAM SOLUTIONS WEDNESDAY, NOVEMBER, 011 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In this
SOLUTION di x = y2 dm. rdv. m = a 2 bdx. = 2 3 rpab2. I x = 1 2 rp L0. b 4 a1 - x2 a 2 b. = 4 15 rpab4. Thus, I x = 2 5 mb2. Ans.
 17 4. Determine the moment of inertia of the semiellipsoid with respect to the x axis and express the result in terms of the mass m of the semiellipsoid. The material has a constant density r. y x y a
17 4. Determine the moment of inertia of the semiellipsoid with respect to the x axis and express the result in terms of the mass m of the semiellipsoid. The material has a constant density r. y x y a
A STUDY ON THE BASIC CONTROL OF SPEED RATIO OF THE CVT SYSTEM USED FOR ELECTRIC VEHICLES
 A STUDY ON THE BASIC CONTROL OF SPEED RATIO OF THE CVT SYSTEM USED FOR ELECTRIC VEHICLES A. Yildiz, O. Kopmaz Uludag University, Engineering Faculty, Mechanical Engineering Department, 1659 Gorukle Campus,
A STUDY ON THE BASIC CONTROL OF SPEED RATIO OF THE CVT SYSTEM USED FOR ELECTRIC VEHICLES A. Yildiz, O. Kopmaz Uludag University, Engineering Faculty, Mechanical Engineering Department, 1659 Gorukle Campus,
Lecture Note 8-1 Hydraulic Systems. System Analysis Spring
 Lecture Note 8-1 Hydraulic Systems 1 Vehicle Model - Brake Model Brake Model Font Wheel Brake Pedal Vacuum Booster Master Cylinder Proportionnig Valve Vacuum Booster Rear Wheel Master Cylinder Proportioning
Lecture Note 8-1 Hydraulic Systems 1 Vehicle Model - Brake Model Brake Model Font Wheel Brake Pedal Vacuum Booster Master Cylinder Proportionnig Valve Vacuum Booster Rear Wheel Master Cylinder Proportioning
ELECTRONIC CONTROL OF CONTINUOUSLY VARIABLE TRANS- The technology of a Continuously Variable Transmission (CVT) has been
 has been") 1 ELECTRONIC CONTROL OF CONTINUOUSLY VARIABLE TRANS- MISSIONS. Paul Vanvuchelen, Christiaan Moons, Willem Minten, Bart De Moor ESAT - Katholieke Universiteit Leuven, Kardinaal Mercierlaan 94, 31 Leuven
1 ELECTRONIC CONTROL OF CONTINUOUSLY VARIABLE TRANS- MISSIONS. Paul Vanvuchelen, Christiaan Moons, Willem Minten, Bart De Moor ESAT - Katholieke Universiteit Leuven, Kardinaal Mercierlaan 94, 31 Leuven
Methodology for modeling, parameter estimation, and validation of powertrain torsional vibration
 Methodology for modeling, parameter estimation, and validation of powertrain torsional vibration Abstract Neda Nickmehr, Lars Eriksson, and Jan Åslund Dep. of Electrical Engineering, Linköping University,
Methodology for modeling, parameter estimation, and validation of powertrain torsional vibration Abstract Neda Nickmehr, Lars Eriksson, and Jan Åslund Dep. of Electrical Engineering, Linköping University,
WLTP Annex 2 Draft Gear selection, shift points
 WLTP-2012-017 Annex 2 Draft Gear selection, shift points 03.06.2012 ANNEX 2 GEAR SELECTION AND SHIFT POINT DETERMINATION FOR VEHICLES EQUIPPED WITH MANUAL TRANSMISSIONS 1. General Approach The following
WLTP-2012-017 Annex 2 Draft Gear selection, shift points 03.06.2012 ANNEX 2 GEAR SELECTION AND SHIFT POINT DETERMINATION FOR VEHICLES EQUIPPED WITH MANUAL TRANSMISSIONS 1. General Approach The following
P211 Spring 2004 Form A
 1. A 2 kg block A traveling with a speed of 5 m/s as shown collides with a stationary 4 kg block B. After the collision, A is observed to travel at right angles with respect to the initial direction with
1. A 2 kg block A traveling with a speed of 5 m/s as shown collides with a stationary 4 kg block B. After the collision, A is observed to travel at right angles with respect to the initial direction with
Electric Traction Machine Design for Heavy Hybrid Vehicles Rasmus Andersson
 Electric Traction Machine Design for Heavy Hybrid Vehicles Rasmus Andersson Licentiate Thesis Div. Industrial Electrical Engineering and Automation Department of Biomedical Engineering 214 Div. Industrial
Electric Traction Machine Design for Heavy Hybrid Vehicles Rasmus Andersson Licentiate Thesis Div. Industrial Electrical Engineering and Automation Department of Biomedical Engineering 214 Div. Industrial
CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5
 1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
w = mg Use: g = 10 m/s 2 1 hour = 60 min = 3600 sec
 The exam is closed book and closed notes. Part I: There are 1 multiple choice questions, 1 point each. The answers for the multiple choice questions are to be placed on the SCANTRON form provided. Make
The exam is closed book and closed notes. Part I: There are 1 multiple choice questions, 1 point each. The answers for the multiple choice questions are to be placed on the SCANTRON form provided. Make
Physics 50 Winter 2016 Final Exam
 Physics 50 Winter 2016 Final Exam Name: Mar 24, 2016 Please show your work! Answers are not complete without clear reasoning. When asked for an expression, you must give your answer in terms of the variables
Physics 50 Winter 2016 Final Exam Name: Mar 24, 2016 Please show your work! Answers are not complete without clear reasoning. When asked for an expression, you must give your answer in terms of the variables
ENGINEERING COUNCIL CERTIFICATE LEVEL MECHANICAL AND STRUCTURAL ENGINEERING C105 TUTORIAL 13 - MOMENT OF INERTIA
 ENGINEERING COUNCIL CERTIFICATE LEVEL MECHANICAL AND STRUCTURAL ENGINEERING C15 TUTORIAL 1 - MOMENT OF INERTIA This tutorial covers essential material for this exam. On completion of this tutorial you
ENGINEERING COUNCIL CERTIFICATE LEVEL MECHANICAL AND STRUCTURAL ENGINEERING C15 TUTORIAL 1 - MOMENT OF INERTIA This tutorial covers essential material for this exam. On completion of this tutorial you
Name:. Set:. Don: Physics: Pre-U Revision Toytime Rotational and Circular Motion
 Name:. Set:. Don: Physics: Pre-U Revision Toytime 2015-16 Rotational and Circular Motion 1 19 (ii) Place ticks in the table below to identify the effect on waves of light as they refract from diamond into
Name:. Set:. Don: Physics: Pre-U Revision Toytime 2015-16 Rotational and Circular Motion 1 19 (ii) Place ticks in the table below to identify the effect on waves of light as they refract from diamond into
Wiley Plus. Final Assignment (5) Is Due Today: Before 11 pm!
 Is Due Today: Before 11 pm!") Wiley Plus Final Assignment (5) Is Due Today: Before 11 pm! Final Exam Review December 9, 009 3 What about vector subtraction? Suppose you are given the vector relation A B C RULE: The resultant vector
Wiley Plus Final Assignment (5) Is Due Today: Before 11 pm! Final Exam Review December 9, 009 3 What about vector subtraction? Suppose you are given the vector relation A B C RULE: The resultant vector
DYNAMICS MOMENT OF INERTIA
 DYNAMICS MOMENT OF INERTIA S TO SELF ASSESSMENT EXERCISE No.1 1. A cylinder has a mass of 1 kg, outer radius of 0.05 m and radius of gyration 0.03 m. It is allowed to roll down an inclined plane until
DYNAMICS MOMENT OF INERTIA S TO SELF ASSESSMENT EXERCISE No.1 1. A cylinder has a mass of 1 kg, outer radius of 0.05 m and radius of gyration 0.03 m. It is allowed to roll down an inclined plane until