Collision Safety for Physical Human-Robot Collaboration
|
|
|
- Edward Noah Bell
- 6 years ago
- Views:
Transcription


1 Collision Safety for Physical Human-Robot Collaboration IROS 2015 Workshop Physical Human-Robot Collaboration Jae-Bok Song School of Mechanical Engineering Korea University Seoul, Korea
2 Outline 2 Human-Robot Interaction 3-Step Safety Strategy Collision Prediction & Avoidance Collision Detection & Reaction : Active Safety Collision Absorption : Passive Safety Advanced Collision Detection Sensorless Collision Detection Collision Detection Index (CDI): Frequency-based Collision Detection Index (CDI): Projection-based Collision Analysis & Simulation Summary



3 Collision Safety 3 Physical Human-Robot Interaction Frequent contacts between humans and robots Sharing the same workspace Collaborative robots Safety Strategies Before collision Collision After collision Avoidance Detection Absorption Vision Torque sensing Spring Human-robot collision Need for collision safety










4 Safe Physical Human-Robot Interaction (phri) 4 3-Step Safety Strategy Step 1 Prediction Step 2 Active Safety Step 3 Passive Safety Approach to Human Collision Prediction Non-contact sensors Path Regeneration Path planning Safe Motion Collision avoidance Fail Collision Detection Sensor: JTS, skin Sensorless: current monitoring Collision Reaction Fail Collision Absorption Safe Joint Mechanism Limit switch Collision Reaction Emergence stop Reflex motion Success Success Success Collision Safety!!









5 Step 1: Collision Prediction and Avoidance 5 Collision Prediction Based on noncontact sensors - Vision sensors, Kinect sensors - Ultrasonic sensors Kinect Camera Collision prediction and avoidance No Capacitive sensor Ultrasonic sensor Human approach Danger? Original path Yes Trajectory generation New path <Collision avoidance using Kinect>


6 Step 1: Collision Prediction and Avoidance 6 Problems with Vision System Occlusion Multiple cameras Sensitive to lighting conditions Use of Ultrasonic Sensors Multiple sensors needed d < 0.3m Warning d< 0.1m Emergence Stop <Collision avoidance using ultrasonic sensors>

 Reaction: Different")

7 Step 2: Active Safety 7 Collision Detection & KU Detection: Disturbance observer + JTS (Joint Torque Sensor) Reaction: Different reaction modes <Collision detection with styrofoam> <Collision detection & reaction with chest>

 8")






 q g(")
 j τ ext = +")

8 Collision Detection using Disturbance Observer (DOB) 8 Principle of collision detection Human-robot collision External force applied to a robot External torque generated at each joint Normal operation * τ j : joint torque, τ ext : external torque Human-robot collision τ = M ( q) q + C( q, q ) q g( q) j + τ M ( q) q + C( q, q ) q g( q) j τ ext = + Collision can be detected by monitoring external torque.
> - Sensorless solution <Joint module> Use of additional sensors Impractical solution - Computation of acceleration Numerical differentiation of encoder signal Noise due to differentiation")
9 Collision Detection using DOB 9 External torque estimation External torque: τ = τ { M ( q) q + C( q, q ) q g( q)} ext j + - Sensor based solution - Measurement of acceleration <Joint torque sensor (JTS)> - Sensorless solution <Joint module> Use of additional sensors Impractical solution - Computation of acceleration Numerical differentiation of encoder signal Noise due to differentiation External torque estimation <Motor current & Friction model> for collision detection
 (")
 ( ) ( ˆ s D s G s G s N s G s U s G s G s")

/G n (s) 1, N(s) 0 )")
10 Disturbance observer (DOB) Basic disturbance observer Collision Detection using DOB 10 ) ( ˆ s D + + = ) ( ) ( ) ( ) ( ) ( 1 ) ( 1 ) ( ) ( ) ( ) ( ˆ s D s G s G s N s G s U s G s G s Q s D n n n ) ( ) ( ) ( ˆ s D s Q s D Human-Robot Collision Detection Robust control Fault Detection & Isolation Adaptive control Applications (if G(s)/G n (s) 1, N(s) 0 ) Disturbance observer

 Output Joint velocity Disturbance External torque ˆ τ ext (")
 = τ ext ( s) s + K D ˆ ( s) = Q( s) D( s) (Q(s): Low")
11 Collision Detection using DOB 11 External Torque Estimator External torque estimator based on disturbance observer System (robot arm joint) External torque estimator Input Joint torque q (s) Output Joint velocity Disturbance External torque ˆ τ ext ( s) External torque estimate: ˆ K τ ext( s) = Q( s) τ ext( s) ˆ τ ext ( s) = τ ext ( s) s + K D ˆ ( s) = Q( s) D( s) (Q(s): Low pass filter)
12 Collision Detection using DOB Collision detection based on external torque External torque estimate in time domain K ˆ τ ext ( s) = τ ext ( s) ˆ τext = K s + K [ τ j { M ( q) q + C( q, q ) q + g( q)} ˆ τext( dl)] dl Generalized momentum: p = M ( q) q (De Luca, 2003) T ˆ τ ext = K [ ( τ j + C ( q, q ) q g( q) ˆ τ e) dt p] External torque estimation without the acceleration information 12 τˆext ˆ τext τth? τˆext <Collision detection algorithm> <Example of typical case>









13 Collision Detection 13 Demonstrations 7 DOF manipulator Specifications Weight 15 kg TCP speed 1 m/s Payload 7 kg Acc. 5 m/s 2 Reach 780 mm DOFs 7 RTOS TwinCAT Control period 1 ms


 soft arm shock absorption 10 Working region 0 0 10 20 30 Inaccurate Displacement (mm)")
14 Step 3: Passive Safety 14 Safe Joint Mechanism (SJM) Passive joint mechanism consisting of springs and cam-cam follower mechanisms Nonlinear spring system High stiffness for positioning accuracy Low stiffness for collision safety Small & Lightweight Automatic return to home position Operation of SJM Normal operation stiff arm accurate positioning Dangerous High stiffness spring Unsafe region Low stiffness spring Certain collision force Safe region Emergency (large impact) soft arm shock absorption 10 Working region Inaccurate Displacement (mm) positioning 40



15 Passive Safety: Demo 15 <Balloon & can> Static collision <Shoulder collision> <Industrial robot with SJMs>
16 16 Advanced Collision Detection 1. Sensorless Collision Detection 2. Collision Dection Index (CDI) Frequency-based CDI Projection-based CDI



17 Sensorless Collision Detection 17 Drawbacks of Sensor-based Collision Detection Costly solution due to the use of sensors Not applicable to industrial manipulators Need for collision detection without the use of extra sensors Sensorless Collision Detection Estimation of joint torques using the motor current and friction model Estimation of joint torques without sensors Sensorless <Joint torque sensor> <Motor current> <Friction model>
18 Sensorless Collision Detection 18 Estimation of joint torque Power transmission τ m : Motor torque α : Torque constant i : Motor input current τ m = α i, τ j = nτ m τ f n : Speed reduction ratio ( M ( q) q + C( q, q ) q g( q) ) τ ext + τ f = nα i + Friction torque model τ f Friction torque τ c sgn( τ h), if q < ε and = τ s sgn( τ h), if q < ε and τ c sgn( q ) + τ v( q ), if q ε q q d d = 0 0 Identification of unknown parameters IROS 2015, S.D. Lee, M.C. Kim, J.B. Song Sensorless Collision Detection for Safe Human-Robot Collaboration
19 19 Sensorless Collision Detection Estimation of joint torque Friction torque identification using least-squares technique Friction torque observer Analysis on friction torque q (s) rˆ ( s ) Friction model Identification τ f τ c sgn( τh), = τ s sgn( τh), τ c sgn( q ) + τv( q ), if if if q < ε and q < ε and q ε q q d d = 0 0 Regressor = Data acquisition LS technique = Data set =
















20 Sensorless Collision Detection 20 Demonstrations 7 DOF robot arm Human-robot collision Specifications Weight 15 kg TCP speed 1 m/s Payload 7 kg Acc. 5 m/s 2 Reach 780 mm DOFs 7 RTOS TwinCAT Control period 1 ms Collision detection without the use of any extra sensors













21 Sensorless Collision Detection 21 Demonstrations 6 DOF industrial manipulator 5 DOF collaborative robot arm Specifications Weight 33 kg TCP speed 1 m/s Payload 6 kg Acc. 5 m/s 2 Reach 1044 mm DOFs 6 Specifications Weight 125kg TCP speed 1.15 m/s Payload 15 kg Acc. 5 m/s 2 Reach 2105 mm DOFs 5











22 Collision Detection for Human-Robot Collaboration 22 Motivation Various tasks of collaborative robots SAFE Human-robot cooperation τ ext Contact task Handling of payload Physical interaction DANGER Unexpected collision τ ext Generation of external torque collision? Need for New Collision Detection algorithm
23 Frequency-based Collision Detection Index 23 Frequency-based Approach Rate of change of external force: Frequency-based Collision Detection Index - Safe Intended Contact : Relatively slow rate of change - Dangerous Unexpected Collision : relatively fast rate of change Need for an observer that detects only the fast-changing external torque Add a high-pass filter to the conventional collision detector Torque (Nm)


24 Frequency-based Collision Detection Index 24 Collision detection of unexpected collision Threshold: ±0.5 Nm Intended contact - Maximum Residual: 0.2 Nm < threshold Unexpected collision - Maximum Residual: 2.2 Nm > threshold Intended contact Collision


25 Frequency-based Collision Detection Index 25 Limitations of Frequency-based Approach No guarantee that intended contact force is always low frequency No guarantee that unexpected collision force is always high frequency Examples: Collisions in low velocity, clamping No clear frequency threshold to distinguish collision from external torque Box assembly Measured contact force F x F y F z Need for more accurate but practical solution
 none τp τe case 1-1 τce case 1-2 τcb case 2-1 τp + τce case 2-2 τp + τcb case")
26 Projection-based Collision Detection Index 26 Subspace Projection based Approach Types of tasks for human-robot collaboration Cases Payload F i F p F cb F ce F cb F ce F g F cb F ce F e Source of τext Collision w/o collision w/ collision (EE or Body) none τp τe case 1-1 τce case 1-2 τcb case 2-1 τp + τce case 2-2 τp + τcb case 3-1 τe +τce case 3-2 τe +τcb Applications Position control (painting, welding) Position control with payload (pick-and-place, material handling) Force control (grinding, hand guiding),
 τ p p 6~7 DOF robot arms ext 3.")
27 Projection-based Collision Detection Index 27 Subspace Projection based approach Collision detection strategy for human-robot collaboration Detectable Cases Collision detection index collision 1. F cb τext Available arms Any robot arms 2. F ce F cb Payload F i F ce ( I J J + ) τ p p 6~7 DOF robot arms ext 3. F p F g F cb F ce ( I T J T + J ( ) ) τ ext 7 DOF robot arms F e
 - F ext = (1, 1, 1) in the xyz space ( col.")
28 Projection-based Collision Detection Index 28 Projection based Approach Main idea of proposed collision detection method Example of subspace projection (in Cartesian space) - F p = (0, 1, 1) in the yz plane ( only payload) - F ext = (1, 1, 1) in the xyz space ( col. Included) - Projection of F ext into the x axis (orthogonal to the yz plane) - Collision force F c = (1, 0, 0) F = F + ext c F p If F ext = F p F ext F ext CDI : zero vector If F ext F p CDI : not zero vector
 c p p p p p c p p ext p p J J I J J I J J I J J I")

 Available for 6 7 DOF robot arms p c")
29 29 CDI : decoupled with τ p & sensitive to τ c m n S p = dim( ) c p p p p p c p p ext p p J J I J J I J J I J J I CDI τ τ τ τ ) ( ) ( ) ( ) ( = Projection-based Collision Detection Index Projection-based Collision Detection Index Collision Detection for Handling a Payload (Case 2) Available for 6 7 DOF robot arms p c ext τ τ τ + =














30 Projection-based Collision Detection Index 30 Experimental results Collision detection for various payloads (w/o payload 1kg 2kg) kg 2kg CDI (Nm) The developed CDI can detect a collision for unknown payloads.
 ) ( ( ) ) ( ( ) ) ( ( ) ) ( ( + + + + + = Collision")
 Physical interaction")

31 31 CDI : decoupled with τ e & sensitive to τ c c T T e T T c T T ext T T J J I J J I J J I J J I CDI τ τ τ τ ) ) ( ( ) ) ( ( ) ) ( ( ) ) ( ( = Collision Detection for Human-Robot Collaboration Collision Detection for Human-Robot Collaboration Collision detection for Contact Task (Case 3) Physical interaction based on force applied to its end-effector External force on the end-effector intended interaction force External force on the body unexpected collision force e c ext τ τ τ + =
 Hybrid")

32 Collision Detection for Human-Robot Collaboration 32 Experimental results Collision detection during hybrid force/position control ) Hybrid force/position control Collision detection - Intended interaction force for impedance control in the x direction - Collision between human and manipulator < Written letters: IRL >


 (Pick and place)")
33 Projection-based Collision Detection Index 33 Scenario for human-robot collaboration Human-robot collaboration in car assembly line Human-robot collaboration Case 1: Approaching Case 2: Handling of payload Case 3: Physical interaction (Position control) (Pick and place) (Hand guiding)


 + e ) τ ext Detectable collision Detectable collision Detectable")
34 Collision Detection for Human-Robot Collaboration 34 Collision detection strategy Case 1: Approaching Case 2: Handling of payload Case 3: Physical interaction Normal operation: τ ext Collision: τ = = 0 ext τ c τ Normal operation: Collision: τ = τ + τ ext c p Normal operation: τ ext = τ p ext e CDI CDI CDI ext ( I J J +) τ p p ext Collision: τ = τ τ = τ + τ ext ( I J ( c T J T ) + e ) τ ext Detectable collision Detectable collision Detectable collision
35 Collision Analysis & Simulation 35
36 Various Safety Criteria 36 Safety criteria for safety evaluation ISO Collaborative operation with humans - v TCP <0.25m/s, F TCP <150N, P max <80W Human pain tolerance [Yamada, 1996] - Static collision (v<0.6m/s) - F<50N Too restrictive criteria Limitation of performance Too generous for a robot arm - Low collision speed Head Injury Criterion (HIC) - HIC saturation with increasing mass - Automobile crash test No robots become dangerous at - HIC<650 prob(ais 3)<0.05 2m/s. [Haddadin, 2008] - Used to be the most popular index





37 Safety Evaluation 37 Safety evaluation of human-robot collision Real impact test Real impact test & evaluation Using a crash-test dummy Simulation S/W Collision analysis DLR Haddadin Features + Most realistic data available - Considerable cost and time for tests - Need to construct a robot






38 Safety Evaluation 38 Safety evaluation of human-robot collision Real impact test Collision simulation Using simulation S/W Simulation S/W Collision analysis MADYMO S/W Features + Relatively reliable results + No need to construct a robot - Expensive S/W



39 Safety Evaluation 39 Safety evaluation of human-robot collision Real impact test Collision analysis and evaluation Analytic method Bicchi 04 Simulation S/W Collision analysis Morita 00 Features + No need to construct a robot + Low cost and easy application - Less reliable data
40 Various Safety Criteria 40 Injury tolerance of body parts Cranial bone [SAEJ885, 1980] Frontal Temporal Occipital Facial bone [Nahum, 1972 & 1976] Mandible (C) Mandible (L) Zygomatic Maxilla Nasal Chest Compression criterion [Lau, 1983] Viscous criterion [Lau, 1986] Abdominal [Miller, 1989] Liver Lower abdomen Fracture tolerance 4.0 kn 3.12 kn 6.41 kn Fracture tolerance 1.89 kn 0.82 kn 0.85 kkn 0.62 kn kn Injury tolerance 22mm 0.5m/s Injury tolerance 310kPa 3.76kN No injury[haddadin, 09] Neck (indirect impact) Shear [Mertz, 1993] Tension [Mertz, 1993] Compression [Mertz, 1993] Extension [Mertz, 1967] Flexion [Mertz, 1967] Bending angle [Gadd, 1971] Neck (direct impact) Thyroid and cricoid [Melvin, 1973] Lower extremities [Devore, 1999] Femur Tibia Upper extremities [Begeman, 1999] Humerus Elbow Forearm Injury tolerance 0msec 25-35msec 45msec 0msec 35msec 60msec 0msec 30msec 57Nm 87.8Nm Extension: 80 Lateral: 60 Injury tolerance kn Injury tolerance 3.8kN 5.4kN Injury tolerance 1.96kN 1.75kN 1.37kN
 Head injury Nasal bone - Protrusion of head - Weakest")

41 Safety Criteria 41 Safety criterion for service robots (blunt impact) Safety criteria (Collision force) Head injury Nasal bone - Protrusion of head - Weakest bone of head - Fracture force : 342 N Comminuted fracture Neck injury Thyroid and cricoid cartilages - Upper end of airway passage - Fracture force : 337 N Obstruction of airflow











42 HuRoCol: Model Parameters 42 HuRoCol (Human-Robot Collision Analysis) Parameters of collision model Human (Hybrid III 50 th percentile male) Weight: 4.5kg(head), 1.5kg(neck), 71kg(body) Neck stiffness: 0.44Nm/deg Robot arm Hybrid III Robot arm model


 Head:")


, Neck")


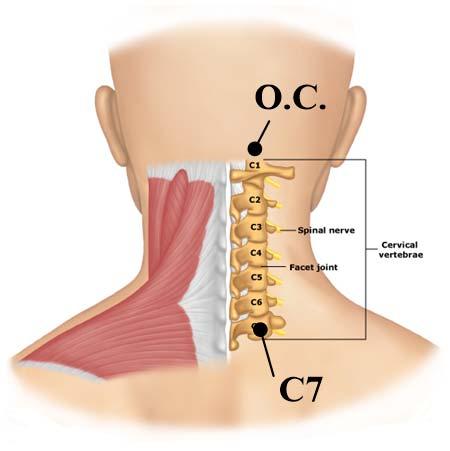
43 HuRoCol: Collision model 43 Head-Neck Model (3 DOF) Head: Revolute joint (OC), Neck stiffness Neck: Revolute joint (C7), Neck stiffness Body: Prismatic joint Collision model Human model
![HuRoCol: Collision model 44 Chest Model Lobdell [17]): 2 DOF Lumped-mass model of anteroposterior thoracic impact To obtain uncoupled inertia matrix Dummy mass is added between k ve and c ve k](/docs-images/77/74799942/images/44-0.jpg "r c b y x k ve c ve x 5 x 6 x 7 - k r : rib cage and directly coupled viscera - c b : air in lungs and blood in the vessels - k ve and c ve : viscoelastic tissue such as thoracic muscle tissue")
44 HuRoCol: Collision model 44 Chest Model Lobdell [17]): 2 DOF Lumped-mass model of anteroposterior thoracic impact To obtain uncoupled inertia matrix Dummy mass is added between k ve and c ve k r c b y x k ve c ve x 5 x 6 x 7 - k r : rib cage and directly coupled viscera - c b : air in lungs and blood in the vessels - k ve and c ve : viscoelastic tissue such as thoracic muscle tissue






45 HuRoCol : Collision model 45 Various collision cases Unconstrained human Impact to head Impact to neck Collision model Constrained human Partially constrained human Wall Wall z x z x Impact to head Impact to neck Impact to head Impact to neck
46 HuRoCo : Solution Method 46 Solution: q = M ( q) 1 ( F C( q, q ) K( q) G( q) D( q )) Matlab/Simulink -4 th and 5 th -order Runge-Kutta method Robotica 2015, J.J. Park, J.B. Song, S. Haddadin, Collision analysis and safety evaluation using a collision model for a frontal robot-human impact




")

 Angle")

 0.6 0.")
47 HuRoCol : Analysis Results Collision with unconstrained human -Impacttotheneckismore dangerous than impact to the head. ( airway obstruction) Impact to head Robot link Impact to neck z x Body O.C. C7 Collision force (N) N 342 N Nasal bone fracture Time (s) Angle (deg) Displacement (cm) 80 O.C.+C7 60 C O.C. Collision Time (s) Collision Body Time (s) 47




 Angle")
 48")
48 HuRoCol : Analysis Results Collision with partially constrained human - Impact to the neck is more dangerous than impact to the head. Impact to head z x Wall Collision force (N) Angle (deg) Impact to neck z x Wall Collision force (N) Angle (deg) 48
49 HuRoCol : Analysis Results Collision with constrained human - Impact to the neck is more dangerous than impact to the head. Impact to head Wall z x N 342 N Nasal bone fracture Time (s) Impact to neck 49
50 HuRoCol : Design of Safe Robot Arm Design of safe robot arm - Design of the robot arm can be modified according to analysis results. - Mass (inertia), length, velocity Impact to neck N 337 N 210 N Thyroid & cricoid fracture (337N) 2.5 kg 2.3 kg 2.1 kg Time (s) Inertia of robot link (1.5m/s) N 344 N 289 N Thyroid & cricoid fracture (337N) 1.5 m/s 1.2 m/s 1.0 m/s Time (s) Velocity of robot (2.5kg)
















51 HuRoCol : Design of Safe Robot Arm The robot arm with SJM can provide much higher safety. Design of the robot arm can be modified according to analysis results. Impact to head Robot link z x O.C. C7 Body Impact to neck


")



52 HuRoCol : Verification 1 Analysis versus Dummy crash-test KUKA KR6 (inertia: 67 kg) Unconstrained human Close agreement with dummy crash-test data Impact to head Haddadin, ICRA 09 Robot link O.C. C7 z x Body Collision force (N)










53 HuRoCol : Verification 2 Analysis versus Dummy crash-test KUKA KR500 (Refl. inertia: 1870 kg) Unconstrained human Close agreement with dummy crash-test data Impact to head Haddadin, ICRA 09 Robot link z x O.C. C7 Body
54 Summary 54 Safe Joint Mechanism: passive approach, infinite bandwidth Frequency-based Collision Detection Intended contact: low frequency & Collision: high frequency Projection-based Collision Detection Index Any collision regardless of frequency and magnitude of collision Safety Criterion: fracture force of thyroid & cricoid cartilages for neck injury - The most appropriate safety indicator for a service robot Proposed collision model and analysis Accurate model - More reliable analysis results for human-robot collisions Evaluation in the robot design phase - Can save time and cost associated with collision tests
55 Q & A Thank you!
Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and Positioning Accuracy of a Robot Arm
 1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators
 des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
ARTISAN ( ) ARTISAN ( ) Human-Friendly Robot Design
 ARTISAN ( ) Human-Friendly Robot Design") Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
 Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Contact Distinction in Human-Robot Cooperation with Admittance Control
 Contact Distinction in Human-Robot Cooperation with Admittance Control Alexandros Kouris, Fotios Dimeas and Nikos Aspragathos Robotics Group, Dept. of Mechanical Engineering & Aeronautics University of
Contact Distinction in Human-Robot Cooperation with Admittance Control Alexandros Kouris, Fotios Dimeas and Nikos Aspragathos Robotics Group, Dept. of Mechanical Engineering & Aeronautics University of
Design and Control of Compliant Humanoids. Alin Albu-Schäffer. DLR German Aerospace Center Institute of Robotics and Mechatronics
 Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation
 German Conference on Robotics (ROBOTIK ), Springer, Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation Thomas Lens, Oskar von Stryk Simulation, Optimization and Robotics
German Conference on Robotics (ROBOTIK ), Springer, Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation Thomas Lens, Oskar von Stryk Simulation, Optimization and Robotics
PRECISION CONTROL OF LINEAR MOTOR DRIVEN HIGH-SPEED/ACCELERATION ELECTRO-MECHANICAL SYSTEMS. Bin Yao
 PRECISION CONTROL OF LINEAR MOTOR DRIVEN HIGH-SPEED/ACCELERATION ELECTRO-MECHANICAL SYSTEMS Bin Yao Intelligent and Precision Control Laboratory School of Mechanical Engineering Purdue University West
PRECISION CONTROL OF LINEAR MOTOR DRIVEN HIGH-SPEED/ACCELERATION ELECTRO-MECHANICAL SYSTEMS Bin Yao Intelligent and Precision Control Laboratory School of Mechanical Engineering Purdue University West
Lecture «Robot Dynamics»: Dynamics 2
 Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots
 IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
Analysis of Torque Capacities in Hybrid Actuation for Human-Friendly Robot Design
 1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Analysis of Torque Capacities in Hybrid Actuation for Human-Friendly Robot Design
1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Analysis of Torque Capacities in Hybrid Actuation for Human-Friendly Robot Design
Toward Torque Control of a KUKA LBR IIWA for Physical Human-Robot Interaction
 Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
Bi-Articular Muscle Actuation Design for Robot Arms
 Bi-Articular Muscle Actuation Design for Robot Arms V. Salvucci Y. Kimura S. Oh Y. Hori Hori-Fujimoto Lab, The University of Tokyo ICRA 2011 Workshop on Biologically-inspired Actuation, Shanghai Outline
Bi-Articular Muscle Actuation Design for Robot Arms V. Salvucci Y. Kimura S. Oh Y. Hori Hori-Fujimoto Lab, The University of Tokyo ICRA 2011 Workshop on Biologically-inspired Actuation, Shanghai Outline
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
An experimental robot load identification method for industrial application
 An experimental robot load identification method for industrial application Jan Swevers 1, Birgit Naumer 2, Stefan Pieters 2, Erika Biber 2, Walter Verdonck 1, and Joris De Schutter 1 1 Katholieke Universiteit
An experimental robot load identification method for industrial application Jan Swevers 1, Birgit Naumer 2, Stefan Pieters 2, Erika Biber 2, Walter Verdonck 1, and Joris De Schutter 1 1 Katholieke Universiteit
Design and Control of Variable Stiffness Actuation Systems
 Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
q 1 F m d p q 2 Figure 1: An automated crane with the relevant kinematic and dynamic definitions.
 Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION
 COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE
 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
Design of Advanced Control Techniques for an Underwater Vehicle
 Design of Advanced Control Techniques for an Underwater Vehicle Divine Maalouf Advisors: Vincent Creuze Ahmed Chemori René Zapata 5 juillet 2012 OUTLINE I. Introduction: Problems/Challenges II. Modeling
Design of Advanced Control Techniques for an Underwater Vehicle Divine Maalouf Advisors: Vincent Creuze Ahmed Chemori René Zapata 5 juillet 2012 OUTLINE I. Introduction: Problems/Challenges II. Modeling
Identification of Joint Impedance
 Identification of Joint Impedance tools for understanding the human motion system, treatment selection and evaluation Lecture 12 SIPE 2010 Case Studies Erwin de Vlugt, PhD -Leiden Research Connection Laboratory
Identification of Joint Impedance tools for understanding the human motion system, treatment selection and evaluation Lecture 12 SIPE 2010 Case Studies Erwin de Vlugt, PhD -Leiden Research Connection Laboratory
Soft Robotics for the Hydraulic Atlas Arms: Joint Impedance Control with Collision Detection and Disturbance Compensation
 This is the author's version of an article that has been published in the IROS 216 proceedings. The final version of record is available at http://dx.doi.org/1.119/iros.216.7759517 Soft Robotics for the
This is the author's version of an article that has been published in the IROS 216 proceedings. The final version of record is available at http://dx.doi.org/1.119/iros.216.7759517 Soft Robotics for the
Lecture 6 mechanical system modeling equivalent mass gears
 M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
Force Tracking Impedance Control with Variable Target Stiffness
 Proceedings of the 17th World Congress The International Federation of Automatic Control Force Tracking Impedance Control with Variable Target Stiffness K. Lee and M. Buss Institute of Automatic Control
Proceedings of the 17th World Congress The International Federation of Automatic Control Force Tracking Impedance Control with Variable Target Stiffness K. Lee and M. Buss Institute of Automatic Control
METHODOLOGY FOR ESTIMATING THORACIC IMPACT RESPONSE IN FRONTAL CRASH TESTS
 METHODOLOGY FOR ESTIMATING THORACIC IMPACT RESPONSE IN FRONTAL CRASH TESTS Craig P. Thor, Hampton C. Gabler Virginia Tech-Wake Forest, Center for Injury Biomechanics ABSTRACT This study has investigated
METHODOLOGY FOR ESTIMATING THORACIC IMPACT RESPONSE IN FRONTAL CRASH TESTS Craig P. Thor, Hampton C. Gabler Virginia Tech-Wake Forest, Center for Injury Biomechanics ABSTRACT This study has investigated
Detumbling and Capturing Strategies with Eddy Current Brake System on Orbital Space Robot
 Detumbling and Capturing Strategies with Eddy Current Brake System on Orbital Space Robot The Next Generation of Space Robotic Servicing Technologies IEEE International Conference on Robotics and Automation
Detumbling and Capturing Strategies with Eddy Current Brake System on Orbital Space Robot The Next Generation of Space Robotic Servicing Technologies IEEE International Conference on Robotics and Automation
Robotics 2 Robot Interaction with the Environment
 Robotics 2 Robot Interaction with the Environment Prof. Alessandro De Luca Robot-environment interaction a robot (end-effector) may interact with the environment! modifying the state of the environment
Robotics 2 Robot Interaction with the Environment Prof. Alessandro De Luca Robot-environment interaction a robot (end-effector) may interact with the environment! modifying the state of the environment
MCE493/593 and EEC492/592 Prosthesis Design and Control
 MCE493/593 and EEC492/592 Prosthesis Design and Control Control Systems Part 3 Hanz Richter Department of Mechanical Engineering 2014 1 / 25 Electrical Impedance Electrical impedance: generalization of
MCE493/593 and EEC492/592 Prosthesis Design and Control Control Systems Part 3 Hanz Richter Department of Mechanical Engineering 2014 1 / 25 Electrical Impedance Electrical impedance: generalization of
Variable Stiffness Actuators for Fast and Safe Motion Control
 Variable Stiffness Actuators for Fast and Safe Motion Control Antonio Bicchi 1, Giovanni Tonietti 1, Michele Bavaro 1, and Marco Piccigallo 1 Centro Interdipartimentale di Ricerca E. Piaggio Università
Variable Stiffness Actuators for Fast and Safe Motion Control Antonio Bicchi 1, Giovanni Tonietti 1, Michele Bavaro 1, and Marco Piccigallo 1 Centro Interdipartimentale di Ricerca E. Piaggio Università
Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints
 Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
The Reflexxes Motion Libraries. An Introduction to Instantaneous Trajectory Generation
 ICRA Tutorial, May 6, 2013 The Reflexxes Motion Libraries An Introduction to Instantaneous Trajectory Generation Torsten Kroeger 1 Schedule 8:30-10:00 Introduction and basics 10:00-10:30 Coffee break 10:30-11:30
ICRA Tutorial, May 6, 2013 The Reflexxes Motion Libraries An Introduction to Instantaneous Trajectory Generation Torsten Kroeger 1 Schedule 8:30-10:00 Introduction and basics 10:00-10:30 Coffee break 10:30-11:30
Comparison of head and thorax cadaver and Hybrid III responses to a frontal sled deceleration for the validation of a car occupant mathematical model
 Comparison of head and thorax cadaver and Hybrid III responses to a frontal sled deceleration the validation of a car occupant mathematical model Philippe Vezin, Karine Bruyère, François Bermond INRETS-LBMC
Comparison of head and thorax cadaver and Hybrid III responses to a frontal sled deceleration the validation of a car occupant mathematical model Philippe Vezin, Karine Bruyère, François Bermond INRETS-LBMC
Experimental Joint Stiffness Identification Depending on Measurements Availability
 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC Orlando FL USA December -5 Experimental Joint Stiffness Identification Depending on Measurements Availability A. Janot
5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC Orlando FL USA December -5 Experimental Joint Stiffness Identification Depending on Measurements Availability A. Janot
Finite Element Models for European Testing: Side Impact Barrier to WG13 Pedestrian Impactors to WG17
 4 th European LS-DYNA Users Conference Occupant II / Pedestrian Safety Finite Element Models for European Testing: Side Impact Barrier to WG13 Pedestrian Impactors to WG17 Trevor Dutton, Arup Solihull,
4 th European LS-DYNA Users Conference Occupant II / Pedestrian Safety Finite Element Models for European Testing: Side Impact Barrier to WG13 Pedestrian Impactors to WG17 Trevor Dutton, Arup Solihull,
Osteology 101: It s all in the Bones (Adapted from Walker, S Exploring Physical Anthropology)
") ANTHR 1-L: Biological Anthropology Lab R. Mitchell, Instructor Name Osteology 101: It s all in the Bones (Adapted from Walker, S. 2005. Exploring Physical Anthropology) Many subjects within the discipline
ANTHR 1-L: Biological Anthropology Lab R. Mitchell, Instructor Name Osteology 101: It s all in the Bones (Adapted from Walker, S. 2005. Exploring Physical Anthropology) Many subjects within the discipline
Technical Bulletin Data format and Injury Criteria Calculation Version 2.1 November 2017 TB 021
 Technical Bulletin Data format and Injury Criteria Calculation TB 021 Title Data format and Injury Criteria Calculation Document Number TB021 Author R Schram Date Related Documents All test protocols Application
Technical Bulletin Data format and Injury Criteria Calculation TB 021 Title Data format and Injury Criteria Calculation Document Number TB021 Author R Schram Date Related Documents All test protocols Application
Road vehicles Dummies for restraint system testing Part 1: Adult dummies
 ISO 2013 All rights reserved ISO TC 22/SC 12/WG 5 N1019 Date: 2013-02-20 ISO/PDTR 12349-1/WD 12349-1 ISO TC 22/SC 12/WG 5 Secretariat: AFNOR Road vehicles Dummies for restraint system testing Part 1: Adult
ISO 2013 All rights reserved ISO TC 22/SC 12/WG 5 N1019 Date: 2013-02-20 ISO/PDTR 12349-1/WD 12349-1 ISO TC 22/SC 12/WG 5 Secretariat: AFNOR Road vehicles Dummies for restraint system testing Part 1: Adult
Introduction to Robotics
 J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
J. Zhang, L. Einig 277 / 307 MIN Faculty Department of Informatics Lecture 8 Jianwei Zhang, Lasse Einig [zhang, einig]@informatik.uni-hamburg.de University of Hamburg Faculty of Mathematics, Informatics
for Articulated Robot Arms and Its Applications
 141 Proceedings of the International Conference on Information and Automation, December 15-18, 25, Colombo, Sri Lanka. 1 Forcefree Control with Independent Compensation for Articulated Robot Arms and Its
141 Proceedings of the International Conference on Information and Automation, December 15-18, 25, Colombo, Sri Lanka. 1 Forcefree Control with Independent Compensation for Articulated Robot Arms and Its
Lecture «Robot Dynamics»: Dynamics and Control
 Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
A HYBRID SYSTEM APPROACH TO IMPEDANCE AND ADMITTANCE CONTROL. Frank Mathis
 A HYBRID SYSTEM APPROACH TO IMPEDANCE AND ADMITTANCE CONTROL By Frank Mathis A THESIS Submitted to Michigan State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
A HYBRID SYSTEM APPROACH TO IMPEDANCE AND ADMITTANCE CONTROL By Frank Mathis A THESIS Submitted to Michigan State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
Advanced Robotic Manipulation
 Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
Trajectory Planning, Setpoint Generation and Feedforward for Motion Systems
 2 Trajectory Planning, Setpoint Generation and Feedforward for Motion Systems Paul Lambrechts Digital Motion Control (4K4), 23 Faculty of Mechanical Engineering, Control Systems Technology Group /42 2
2 Trajectory Planning, Setpoint Generation and Feedforward for Motion Systems Paul Lambrechts Digital Motion Control (4K4), 23 Faculty of Mechanical Engineering, Control Systems Technology Group /42 2
Adaptive Robust Tracking Control of Robot Manipulators in the Task-space under Uncertainties
 Australian Journal of Basic and Applied Sciences, 3(1): 308-322, 2009 ISSN 1991-8178 Adaptive Robust Tracking Control of Robot Manipulators in the Task-space under Uncertainties M.R.Soltanpour, M.M.Fateh
Australian Journal of Basic and Applied Sciences, 3(1): 308-322, 2009 ISSN 1991-8178 Adaptive Robust Tracking Control of Robot Manipulators in the Task-space under Uncertainties M.R.Soltanpour, M.M.Fateh
Case Study: The Pelican Prototype Robot
 5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
Decoupling Identification with Closed-loop-controlled Elements for Two-link Arm with Elastic Joints
 Preprints of the 9th International Symposium on Robot Control (SYROCO'9) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-2, 29 Decoupling Identification
Preprints of the 9th International Symposium on Robot Control (SYROCO'9) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-2, 29 Decoupling Identification
Exponential Controller for Robot Manipulators
 Exponential Controller for Robot Manipulators Fernando Reyes Benemérita Universidad Autónoma de Puebla Grupo de Robótica de la Facultad de Ciencias de la Electrónica Apartado Postal 542, Puebla 7200, México
Exponential Controller for Robot Manipulators Fernando Reyes Benemérita Universidad Autónoma de Puebla Grupo de Robótica de la Facultad de Ciencias de la Electrónica Apartado Postal 542, Puebla 7200, México
Modelling and Control of Variable Stiffness Actuated Robots
 Modelling and Control of Variable Stiffness Actuated Robots Sabira Jamaludheen 1, Roshin R 2 P.G. Student, Department of Electrical and Electronics Engineering, MES College of Engineering, Kuttippuram,
Modelling and Control of Variable Stiffness Actuated Robots Sabira Jamaludheen 1, Roshin R 2 P.G. Student, Department of Electrical and Electronics Engineering, MES College of Engineering, Kuttippuram,
Multiple-priority impedance control
 Multiple-priority impedance control Robert Platt Jr, Muhammad Abdallah, and Charles Wampler Abstract Impedance control is well-suited to robot manipulation applications because it gives the designer a
Multiple-priority impedance control Robert Platt Jr, Muhammad Abdallah, and Charles Wampler Abstract Impedance control is well-suited to robot manipulation applications because it gives the designer a
CS277 - Experimental Haptics Lecture 13. Six-DOF Haptic Rendering I
 CS277 - Experimental Haptics Lecture 13 Six-DOF Haptic Rendering I Outline Motivation Direct rendering Proxy-based rendering - Theory - Taxonomy Motivation 3-DOF avatar The Holy Grail? Tool-Mediated Interaction
CS277 - Experimental Haptics Lecture 13 Six-DOF Haptic Rendering I Outline Motivation Direct rendering Proxy-based rendering - Theory - Taxonomy Motivation 3-DOF avatar The Holy Grail? Tool-Mediated Interaction
Rhythmic Robot Arm Control Using Oscillators
 Rhythmic Robot Arm Control Using Oscillators Matthew M. Williamson MIT AI Lab, 545 Technology Square, Cambridge, MA 2139 http://www.ai.mit.edu/people/matt Abstract This paper presents an approach to robot
Rhythmic Robot Arm Control Using Oscillators Matthew M. Williamson MIT AI Lab, 545 Technology Square, Cambridge, MA 2139 http://www.ai.mit.edu/people/matt Abstract This paper presents an approach to robot
MEAM 520. More Velocity Kinematics
 MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
MEAM 520 More Velocity Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 12: October
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL
 GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic Actuation Systems
 211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
Simulation in Computer Graphics Elastic Solids. Matthias Teschner
 Simulation in Computer Graphics Elastic Solids Matthias Teschner Outline Introduction Elastic forces Miscellaneous Collision handling Visualization University of Freiburg Computer Science Department 2
Simulation in Computer Graphics Elastic Solids Matthias Teschner Outline Introduction Elastic forces Miscellaneous Collision handling Visualization University of Freiburg Computer Science Department 2
Investigation of Human-Robot Interaction Stability Using Lyapunov Theory
 2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 9-23, 2008 Investigation of Human-Robot Interaction Stability Using Lyapunov Theory Vincent Duchaine and Clément M.
2008 IEEE International Conference on Robotics and Automation Pasadena, CA, USA, May 9-23, 2008 Investigation of Human-Robot Interaction Stability Using Lyapunov Theory Vincent Duchaine and Clément M.
Robotics I. Classroom Test November 21, 2014
 Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Virtual Passive Controller for Robot Systems Using Joint Torque Sensors
 NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
A Sliding Mode Controller Using Neural Networks for Robot Manipulator
 ESANN'4 proceedings - European Symposium on Artificial Neural Networks Bruges (Belgium), 8-3 April 4, d-side publi., ISBN -9337-4-8, pp. 93-98 A Sliding Mode Controller Using Neural Networks for Robot
ESANN'4 proceedings - European Symposium on Artificial Neural Networks Bruges (Belgium), 8-3 April 4, d-side publi., ISBN -9337-4-8, pp. 93-98 A Sliding Mode Controller Using Neural Networks for Robot
Chapter 26 Elastic Properties of Materials
 Chapter 26 Elastic Properties of Materials 26.1 Introduction... 1 26.2 Stress and Strain in Tension and Compression... 2 26.3 Shear Stress and Strain... 4 Example 26.1: Stretched wire... 5 26.4 Elastic
Chapter 26 Elastic Properties of Materials 26.1 Introduction... 1 26.2 Stress and Strain in Tension and Compression... 2 26.3 Shear Stress and Strain... 4 Example 26.1: Stretched wire... 5 26.4 Elastic
Determination of a Predictive Stiffness Model for a 1 DOF Human Inspired Robotic Joint
 Marquette University e-publications@marquette Master's Theses (2009 -) Dissertations, Theses, and Professional Projects Determination of a Predictive Stiffness Model for a 1 DOF Human Inspired Robotic
Marquette University e-publications@marquette Master's Theses (2009 -) Dissertations, Theses, and Professional Projects Determination of a Predictive Stiffness Model for a 1 DOF Human Inspired Robotic
Estimating Q Dummy Injury Criteria Using the CASPER Project Results and Scaling Adult Reference Values
 IRC-- IRCOBI Conference Estimating Q Dummy Injury Criteria Using the CASPER Project Results and Scaling Adult Reference Values Heiko Johannsen, Xavier Trosseille, Philippe Lesire², Philippe Beillas³ Abstract
IRC-- IRCOBI Conference Estimating Q Dummy Injury Criteria Using the CASPER Project Results and Scaling Adult Reference Values Heiko Johannsen, Xavier Trosseille, Philippe Lesire², Philippe Beillas³ Abstract
LUMPED MASS MODELLING WITH APPLICATIONS
 LUMPED MASS MODELLING WITH APPLICATIONS July, 8, 07 Lumped Mass Modelling with Applications . Motivation. Some examples 3. Basic control scheme 4. Single joint single link - single mass INDEX 5. Extensions
LUMPED MASS MODELLING WITH APPLICATIONS July, 8, 07 Lumped Mass Modelling with Applications . Motivation. Some examples 3. Basic control scheme 4. Single joint single link - single mass INDEX 5. Extensions
Robust Control of Cooperative Underactuated Manipulators
 Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Sensorless Torque/Force Control
 4 Sensorless Torque/Force Control Islam S. M. Khalil and Asif Sabanovic Sabanci University Turkey 1. Introduction Motion control systems represent a main subsystem for majority of processing systems that
4 Sensorless Torque/Force Control Islam S. M. Khalil and Asif Sabanovic Sabanci University Turkey 1. Introduction Motion control systems represent a main subsystem for majority of processing systems that
Development and Validation of the FAT Finite Element Model for the Side Impact Dummy EUROSID-1
 Development and Validation of the FAT Finite Element Model for the Side Impact Dummy EUROSID-1 Thomas Pyttel* *ESI GmbH, 65760 Eschborn, Frankfurter Str. 13-15, Germany ABSTRACT A new deformable model
Development and Validation of the FAT Finite Element Model for the Side Impact Dummy EUROSID-1 Thomas Pyttel* *ESI GmbH, 65760 Eschborn, Frankfurter Str. 13-15, Germany ABSTRACT A new deformable model
Nonlinear Identification of Backlash in Robot Transmissions
 Nonlinear Identification of Backlash in Robot Transmissions G. Hovland, S. Hanssen, S. Moberg, T. Brogårdh, S. Gunnarsson, M. Isaksson ABB Corporate Research, Control Systems Group, Switzerland ABB Automation
Nonlinear Identification of Backlash in Robot Transmissions G. Hovland, S. Hanssen, S. Moberg, T. Brogårdh, S. Gunnarsson, M. Isaksson ABB Corporate Research, Control Systems Group, Switzerland ABB Automation
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators. Velocity Kinematics
 Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Robotics I Kinematics, Dynamics and Control of Robotic Manipulators Velocity Kinematics Dr. Christopher Kitts Director Robotic Systems Laboratory Santa Clara University Velocity Kinematics So far, we ve
Control of constrained spatial three-link flexible manipulators
 Control of constrained spatial three-link flexible manipulators Sinan Kilicaslan, M. Kemal Ozgoren and S. Kemal Ider Gazi University/Mechanical Engineering Department, Ankara, Turkey Middle East Technical
Control of constrained spatial three-link flexible manipulators Sinan Kilicaslan, M. Kemal Ozgoren and S. Kemal Ider Gazi University/Mechanical Engineering Department, Ankara, Turkey Middle East Technical
Demonstrating the Benefits of Variable Impedance to Telerobotic Task Execution
 Demonstrating the Benefits of Variable Impedance to Telerobotic Task Execution Daniel S. Walker, J. Kenneth Salisbury and Günter Niemeyer Abstract Inspired by human physiology, variable impedance actuation
Demonstrating the Benefits of Variable Impedance to Telerobotic Task Execution Daniel S. Walker, J. Kenneth Salisbury and Günter Niemeyer Abstract Inspired by human physiology, variable impedance actuation
Observer Based Friction Cancellation in Mechanical Systems
 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014) Oct. 22 25, 2014 in KINTEX, Gyeonggi-do, Korea Observer Based Friction Cancellation in Mechanical Systems Caner Odabaş
2014 14th International Conference on Control, Automation and Systems (ICCAS 2014) Oct. 22 25, 2014 in KINTEX, Gyeonggi-do, Korea Observer Based Friction Cancellation in Mechanical Systems Caner Odabaş
Stiffness estimation for flexible transmissions
 SICURA@SIDRA 2010 13 Settembre L Aquila Stiffness estimation for flexible transmissions Fabrizio Flacco Alessandro De Luca Dipartimento di Informatica e Sistemistica Motivation Why we need to know the
SICURA@SIDRA 2010 13 Settembre L Aquila Stiffness estimation for flexible transmissions Fabrizio Flacco Alessandro De Luca Dipartimento di Informatica e Sistemistica Motivation Why we need to know the
Jonathan Fraser METEOR Project P07102 Environmental Test Stand Project Manager/Lead Engineer Detail Design Review Report
 Jonathan Fraser METEOR Project P07102 Environmental Test Stand Project Manager/Lead Engineer Detail Design Review Report The project, P07102 Environmental Test Stand, is specifically involved in the design,
Jonathan Fraser METEOR Project P07102 Environmental Test Stand Project Manager/Lead Engineer Detail Design Review Report The project, P07102 Environmental Test Stand, is specifically involved in the design,
Illustrative exercises for the lectures
 Biomechanics, LTH, 2013 Biomechanics Illustrative exercises for the lectures Ingrid Svensson 2013 1 1. To practise the use of free-body diagram, consider the problem of analyzing the stress in man s back
Biomechanics, LTH, 2013 Biomechanics Illustrative exercises for the lectures Ingrid Svensson 2013 1 1. To practise the use of free-body diagram, consider the problem of analyzing the stress in man s back
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT
 A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT Florentina Adascalitei 1, Ioan Doroftei 1, Ovidiu Crivoi 1, Bram Vanderborght, Dirk Lefeber 1 "Gh. Asachi" Technical University
A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT Florentina Adascalitei 1, Ioan Doroftei 1, Ovidiu Crivoi 1, Bram Vanderborght, Dirk Lefeber 1 "Gh. Asachi" Technical University
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation
 Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
Linear Shaft Motor Sizing Application Note
 Linear Shaft Motor Sizing Application Note By Jeramé Chamberlain One of the most straightforward tasks in the design of a linear motion system is to specify a motor and drive combination that can provide
Linear Shaft Motor Sizing Application Note By Jeramé Chamberlain One of the most straightforward tasks in the design of a linear motion system is to specify a motor and drive combination that can provide
Chapter 3 Numerical Methods
 Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Chapter 3 Numerical Methods Part 3 3.4 Differential Algebraic Systems 3.5 Integration of Differential Equations 1 Outline 3.4 Differential Algebraic Systems 3.4.1 Constrained Dynamics 3.4.2 First and Second
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
Multi-Priority Cartesian Impedance Control
 Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March Overview of dynamic control systems
 ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia. 8.01t Nov 3, 2004
 Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia 8.01t Nov 3, 2004 Rotation and Translation of Rigid Body Motion of a thrown object Translational Motion of the Center of Mass Total
Rotational Motion, Torque, Angular Acceleration, and Moment of Inertia 8.01t Nov 3, 2004 Rotation and Translation of Rigid Body Motion of a thrown object Translational Motion of the Center of Mass Total
Advantages of Variable Frequency Drive Technology for Face Conveyor and Plow Systems in Longwall Mining
 Advantages of Variable Frequency Drive Technology for Face Conveyor and Plow Systems in Longwall Mining Andreas Johannes Westphalen Caterpillar Global Mining Table of Contents Abstract Abstract... 3 Introduction...
Advantages of Variable Frequency Drive Technology for Face Conveyor and Plow Systems in Longwall Mining Andreas Johannes Westphalen Caterpillar Global Mining Table of Contents Abstract Abstract... 3 Introduction...
1. Consider the 1-DOF system described by the equation of motion, 4ẍ+20ẋ+25x = f.
 Introduction to Robotics (CS3A) Homework #6 Solution (Winter 7/8). Consider the -DOF system described by the equation of motion, ẍ+ẋ+5x = f. (a) Find the natural frequency ω n and the natural damping ratio
Introduction to Robotics (CS3A) Homework #6 Solution (Winter 7/8). Consider the -DOF system described by the equation of motion, ẍ+ẋ+5x = f. (a) Find the natural frequency ω n and the natural damping ratio
Force-feedback control and non-contact sensing: a unified approach
 Force-feedback control and non-contact sensing: a unified approach Bernard Espiau, Jean-Pierre Merlet, Claude Samson INRIA Centre de Sophia-Antipolis 2004 Route des Lucioles 06560 Valbonne, France Abstract
Force-feedback control and non-contact sensing: a unified approach Bernard Espiau, Jean-Pierre Merlet, Claude Samson INRIA Centre de Sophia-Antipolis 2004 Route des Lucioles 06560 Valbonne, France Abstract
ROBUST CONTROL OF A FLEXIBLE MANIPULATOR ARM: A BENCHMARK PROBLEM. Stig Moberg Jonas Öhr
 ROBUST CONTROL OF A FLEXIBLE MANIPULATOR ARM: A BENCHMARK PROBLEM Stig Moberg Jonas Öhr ABB Automation Technologies AB - Robotics, S-721 68 Västerås, Sweden stig.moberg@se.abb.com ABB AB - Corporate Research,
ROBUST CONTROL OF A FLEXIBLE MANIPULATOR ARM: A BENCHMARK PROBLEM Stig Moberg Jonas Öhr ABB Automation Technologies AB - Robotics, S-721 68 Västerås, Sweden stig.moberg@se.abb.com ABB AB - Corporate Research,
INSTRUCTIONS TO CANDIDATES:
 NATIONAL NIVERSITY OF SINGAPORE FINAL EXAMINATION FOR THE DEGREE OF B.ENG ME 444 - DYNAMICS AND CONTROL OF ROBOTIC SYSTEMS October/November 994 - Time Allowed: 3 Hours INSTRCTIONS TO CANDIDATES:. This
NATIONAL NIVERSITY OF SINGAPORE FINAL EXAMINATION FOR THE DEGREE OF B.ENG ME 444 - DYNAMICS AND CONTROL OF ROBOTIC SYSTEMS October/November 994 - Time Allowed: 3 Hours INSTRCTIONS TO CANDIDATES:. This
Impedance control using a cascaded loop force control
 Impedance control using a cascaded loop force control Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin, Maxime Gautier To cite this version: Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin,
Impedance control using a cascaded loop force control Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin, Maxime Gautier To cite this version: Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin,
Global Sensitivity Analysis in Industrial Application with LS-OPT
 9. LS-DYNA Forum, Bamberg 2010 Optimierung II Global Sensitivity Analysis in Industrial Application with LS-OPT Björn Hohage*, Anja Förderer**, Gordon Geißler**, Heiner Müllerschön** *Audi AG, Ingolstadt,
9. LS-DYNA Forum, Bamberg 2010 Optimierung II Global Sensitivity Analysis in Industrial Application with LS-OPT Björn Hohage*, Anja Förderer**, Gordon Geißler**, Heiner Müllerschön** *Audi AG, Ingolstadt,
Lecture 6: Control Problems and Solutions. CS 344R: Robotics Benjamin Kuipers
 Lecture 6: Control Problems and Solutions CS 344R: Robotics Benjamin Kuipers But First, Assignment 1: Followers A follower is a control law where the robot moves forward while keeping some error term small.
Lecture 6: Control Problems and Solutions CS 344R: Robotics Benjamin Kuipers But First, Assignment 1: Followers A follower is a control law where the robot moves forward while keeping some error term small.
A Benchmark Problem for Robust Control of a Multivariable Nonlinear Flexible Manipulator
 Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-11, 28 A Benchmark Problem for Robust Control of a Multivariable Nonlinear Flexible Manipulator
Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-11, 28 A Benchmark Problem for Robust Control of a Multivariable Nonlinear Flexible Manipulator
Controlling the Apparent Inertia of Passive Human- Interactive Robots
 Controlling the Apparent Inertia of Passive Human- Interactive Robots Tom Worsnopp Michael Peshkin J. Edward Colgate Kevin Lynch Laboratory for Intelligent Mechanical Systems: Mechanical Engineering Department
Controlling the Apparent Inertia of Passive Human- Interactive Robots Tom Worsnopp Michael Peshkin J. Edward Colgate Kevin Lynch Laboratory for Intelligent Mechanical Systems: Mechanical Engineering Department
Robot Dynamics II: Trajectories & Motion
 Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Robot Dynamics II: Trajectories & Motion Are We There Yet? METR 4202: Advanced Control & Robotics Dr Surya Singh Lecture # 5 August 23, 2013 metr4202@itee.uq.edu.au http://itee.uq.edu.au/~metr4202/ 2013
Chapter 5 Design. D. J. Inman 1/51 Mechanical Engineering at Virginia Tech
 Chapter 5 Design Acceptable vibration levels (ISO) Vibration isolation Vibration absorbers Effects of damping in absorbers Optimization Viscoelastic damping treatments Critical Speeds Design for vibration
Chapter 5 Design Acceptable vibration levels (ISO) Vibration isolation Vibration absorbers Effects of damping in absorbers Optimization Viscoelastic damping treatments Critical Speeds Design for vibration
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Nonlinear PD Controllers with Gravity Compensation for Robot Manipulators
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 4, No Sofia 04 Print ISSN: 3-970; Online ISSN: 34-408 DOI: 0.478/cait-04-00 Nonlinear PD Controllers with Gravity Compensation
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 4, No Sofia 04 Print ISSN: 3-970; Online ISSN: 34-408 DOI: 0.478/cait-04-00 Nonlinear PD Controllers with Gravity Compensation
A Study on the Tube of Integral Propeller Shaft for the Rear-wheel Drive Automobile Using Carbon Composite Fiber
 A Study on the Tube of Integral Propeller Shaft for the Rear-wheel Drive Automobile Using Carbon Composite Fiber Kibong Han Mechatronics Department, Jungwon University, 85 Munmu-ro, Goesan-gun, South Korea.
A Study on the Tube of Integral Propeller Shaft for the Rear-wheel Drive Automobile Using Carbon Composite Fiber Kibong Han Mechatronics Department, Jungwon University, 85 Munmu-ro, Goesan-gun, South Korea.
Contact Stiffness and Damping Estimation for Robotic Systems
 D. Erickson M. Weber I. Sharf Department of Mechanical Engineering McGill University Montreal, PQ Canada inna.sharf@mcgill.ca Contact Stiffness and Damping Estimation for Robotic Systems Abstract In this
D. Erickson M. Weber I. Sharf Department of Mechanical Engineering McGill University Montreal, PQ Canada inna.sharf@mcgill.ca Contact Stiffness and Damping Estimation for Robotic Systems Abstract In this
Trajectory Planning from Multibody System Dynamics
 Trajectory Planning from Multibody System Dynamics Pierangelo Masarati Politecnico di Milano Dipartimento di Ingegneria Aerospaziale Manipulators 2 Manipulator: chain of
Trajectory Planning from Multibody System Dynamics Pierangelo Masarati Politecnico di Milano Dipartimento di Ingegneria Aerospaziale Manipulators 2 Manipulator: chain of