Design and Control of Compliant Humanoids. Alin Albu-Schäffer. DLR German Aerospace Center Institute of Robotics and Mechatronics
|
|
|
- Allen Weaver
- 5 years ago
- Views:
Transcription


1 Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics


2 Torque Controlled Light-weight Robots Torque sensing in each joint Mature technology for experimental platforms

 Available")
3 First Applications of the Technology in Automotive Industry Sensor based assembly with the LWR KUKA Demonstrator Robot commercialized by KUKA since 2008 Fast, open research software interface (FRI) Available since 2010



4 Gearbox Assembly at Daimler Special Gripper from earlier solutions Production started /7 Application with the LWR More than gearbox units in Mercedes cars Production without fences. Humans interact with the robot


5 Modularity and light-weight allows the construction of complex kinematics using the arm joints DLR crawler DLR walker [Ott & al. Humanoids 2010, 2011]

6 Mechatronic Joint Design (redundant)












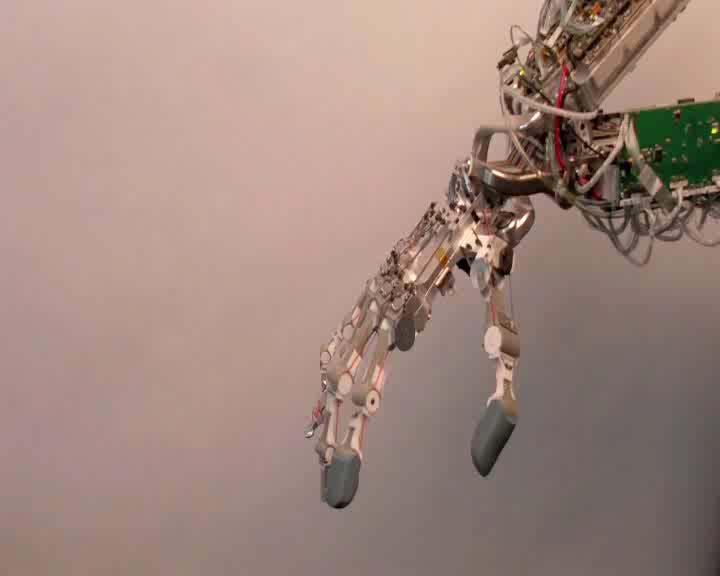
7 The complete Finger System
8 The DLR-HIT-hands on the way to commercialization Hand I with four fingers,12 actuators tooth belt drives 1kg finger tip force torque control Hand II with five fingers,15 actuators


, DEXHAND")

9 DEXHAND Europe s first Robonaut hand Tendon driven, 12 active dof Less than 3.3 kg Finger length 93 mm (Thumb 100 mm), DEXHAND length 340 mm 25 N Fingertip force (Thumb 40 N) streched out 25 N test




10 New light-weight robot with f/t sensing in the joints and at extremities - Higher power and speed SARAH
11 Cartesian Impedance Control Unified approach for torque, position and impedance control on Cartesian and joint level x d Impedance control d torque control K T f. B motor dynamics Robot dynamics a 1 F (1 K ) T F B B (1 K T ) 1 B Passivity Robustness in contact with the environment [Albu-Schäffer & al, IJRR 2007]
12



13 DLR Hand II Impedance Control Joint impedance Control Cartesian Impedance Control Object Impedance Control [Wimböck al. IJRR 2010]


14 Impedance Control for Two Handed Manipulation Gravity compensation d V ( ) g ( ) D( ) Stiffness term 1ms control cycle for the whole system Damping term



15 Human-Robot-Interaction Compliant Control of the entire Robot Impedance Control w Admittance Control M D f v Rollin Justin 53 active dof 150 kg

16 Current Research Plattform based on Variable Compliance Actuation (VIA) Non linear spring Load Motor 1 q1 q Motor 2 q2 Output Link Motion The antagonistic concept Stiffness adjustment



17 Anthropomorphic Hand-Arm-System Size, force and dynamics of a human arm/hand Variable stiffness 52 motors,111 position sensors No torque sensing: torque observed from positions



18 A Hand-Arm System for Space Robot Assistrance Extension of the passivity based control approaches to the VIA robots: Variable, nonlinear stiffness Strongly coupled joints



19 The new integrated hand-arm-system (with variable impedance actuation VIA) Grebenstein & al. Humanoids 2010]

20 VIA Variable Impedance Actuators 1 Antagonistic Actuator (fingers) 2 equally sized motors motors pull tendons Changing Stiffness Moving Joint Output I M1 External Load Motor 1 θ 1 Motor 2 I M2 θ 2 q Control τ L Torque Estimator
21 VIA Variable Impedance Actuators 2 Bidirectional Antagonistic Actuator (underarm rotation and wrist) 2 equally sized motors both motors push and pull (bidirectional) Moving Joint Output Changing Stiffness Motor 1 q External Load Nonlinear Springs Motor 2 [Petit & al. ICRA 2010]
22 VIA Variable Impedance Actuators 3 Adjustable Stiffness Actuator (upper arm) one big motor1 moves the joint one small motor2 changes joint stiffness without motor2 we have a serial elastic joint Motor 1 Moving Joint Output Harmonic Drive Gear External Load q Nonlinear Springs Changing Stiffness Motor 2 [Wolf & al. ICRA 2008]


")
 Size (w/wo Motors) Max.")
 Variable Stiffness ± 180 Nm 0 / 315 Nm/rad 16.")
23 Joint Data Sheet: DLR VS-Joint VIACTORS Actuator Type Maximum Joint Torque (repeatable, evaluated by measurement) Min./Max. Stiffness (no external load) Max. Storable Energy Max. Equilibrium Velocity Nominal Power (not max./peak!) Min. Stiffness Adjusting Time (from 3% to 97% stiffness) Torque Hysteresis at Max. Torque Weight (w/wo Motors) Size (w/wo Motors) Max. Deflection Range (min./max Stiff.) Variable Stiffness ± 180 Nm 0 / 315 Nm/rad 16.8 J 217 /s = 320 W 0.2 s 7.3% 1.4 / ~ 2.0 kg Ø97x106 / ~ Ø97x166 mm ± 14 / ± 14 φ Joint Deflection cφ c : Radius of Cam Disk
 Min./Max.")
 Min.")

![15 s Stiffness [Nm/rad] Torque Hysteresis at Max.](/docs-images/84/89548432/images/24-9.jpg "Torque Weight (w/wo Motors) Size (w/wo Motors) Max.")
24 Joint Data Sheet: DLR QA-Joint VIACTORS Actuator Type Maximum Joint Torque (repeatable, evaluated by measurement) Min./Max. Stiffness (no external load) Max. Storable Energy Max. Equilibrium Velocity Nominal Power (not max./peak!) Min. Stiffness Adjusting Time (from 3% to 97% stiffness) Quasi Antagonistic ±40 Nm 20 / 550 Nm/rad 2.7 J 217 /s = 320 W 0.15 s Stiffness [Nm/rad] Torque Hysteresis at Max. Torque Weight (w/wo Motors) Size (w/wo Motors) Max. Deflection Range (min./max Stiff.) +/-12.5% 1.4 / ~ 2.0 kg Ø90x100 / ~ Ø90x160 mm ± 15 / ± 3 Torque [Nm]

25 Validation of Arm Robustness
26 Control of VIA Joints The joints have very low intrinsic damping useful for cyclic movements involving energy storage (running or throwing) damping of the arm for fast, fine positioning tasks has to be realized by control. Ensuring the achievement of the desired link position with motor position based control. Providing the desired stiffness property.
27 General Model For all considered actuator types so far, following model structure holds External disturbance torque Main properties: - under-actuation: less control inputs ( 1, 2 ) than dimension of configuration space - positive definiteness of V (x) We propose this generic model for controller design of VIA joints Flexible joint model is a particular case [Albu-Schäffer at ICRA 2010]

28 Decoupling in Modal Coordinates back to link coordinates K K K K P D T S QK Q K Q K Q K PQ DQ TQ SQ Q T Q Q Q T T T symmetric, nondiagonal p.d state feedback controller in link coordinates. u K ~ 1 1 P KD KT K KS K [Petit at ICRA 2010]

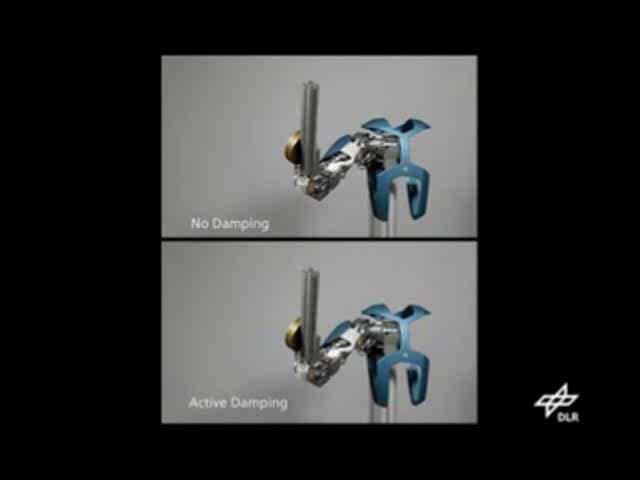
29 Experimental Validation Point to Point trajectory Vibration Damping OFF Vibration ON
30 Experimental Validation

31 Cartesian Impedance Control Implementation of a simple Cartesian impedance V ( q) τ m g( q) D( q) q q Potential: V ( q) VS ( H ( q), H d, d ) H d K d Damping design: Double diagonalization of the inertia matrix and the Hessian of the potential function. 6 F ext H (q) Extension for variable stiffness joints Combine active and passive impedance [Petit at IROS11]

32 Passive Joint Elasticities & Cartesian Stiffness generate by passive joint stiffness diagonal Cartesian transformation bounded [Albu-Schäffer et al. 03] severe limitation of achievable Cartesian stiffness error: 25-55%




33 Combining Active & Passive Impedances active impedance controller passive joint stiffness best of both worlds: overcome limitations of passive stiffness get VSA features




 fast (366Hz for")
34 1. Step: Passive Compliance Optimization achieve Cartesian compliance as good as possible by passive compliance least-squares problem solution by active-set algorithm efficient (pseudo inverse) fast (366Hz for 4 joints) passive compliance residual


35 2. Step: Active Compliance Optimization remove residual by active compliance optimization formulation: possibly negative definite stability issues.. goal matrix.. positive definite solution by matrix nearness problem efficient (eigenvalue problem) [Higham 98]


36 Results motor pos link pos passive spring dominant: motion provided by link active spring dominant: motion provided by motor


37 Performance Validation Rigid joint VIA joint Optimal control for maximizing end velocity. - Analytical solutions for 1dof, linear case - Extension to nonlinear case with dynamic constraints

38 Constant vs. Variable Stiffness Increase in velocity for the QA joint [Haddadin at IFAC 2011]


39 Performance Validation for multi dof 2 dof system ball throwing Evaluation of human-inspired throwing motion generation

40 Performance Demonstration with the Hand Chalon & al. IROS 2011

41 Performance Validation: Kicking Experiments
42 Experimental Results Speed Kicking range Impact joint torque Stiff Joint 3.06 m/s 1.6 m 85 Nm VS-Joint 6.35 m/s 4.05 m 10 Nm


43 WP2- Robotics of Biological Neuro-mechanical Control Imperial College London [Ganesh & al., TRO 2011]
44 The DLR Hand-Arm System
Toward Torque Control of a KUKA LBR IIWA for Physical Human-Robot Interaction
 Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
 Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Backstepping experimentally applied to an antagonistically driven finger with flexible tendons
 Proceedings of the 19th World Congress The International Federation of Automatic Control Backstepping experimentally applied to an antagonistically driven finger with flexible tendons Maxime Chalon 1 and
Proceedings of the 19th World Congress The International Federation of Automatic Control Backstepping experimentally applied to an antagonistically driven finger with flexible tendons Maxime Chalon 1 and
Modelling and Control of Variable Stiffness Actuated Robots
 Modelling and Control of Variable Stiffness Actuated Robots Sabira Jamaludheen 1, Roshin R 2 P.G. Student, Department of Electrical and Electronics Engineering, MES College of Engineering, Kuttippuram,
Modelling and Control of Variable Stiffness Actuated Robots Sabira Jamaludheen 1, Roshin R 2 P.G. Student, Department of Electrical and Electronics Engineering, MES College of Engineering, Kuttippuram,
After decades of intensive research, it seems that
 Soft Robotics PUNCHSTOCK From Torque Feedback-Controlled Lightweight Robots to Intrinsically Compliant Systems BY ALIN ALBU-SCH AFFER, OLIVER EIBERGER, MARKUS GREBENSTEIN, SAMI HADDADIN, CHRISTIAN OTT,
Soft Robotics PUNCHSTOCK From Torque Feedback-Controlled Lightweight Robots to Intrinsically Compliant Systems BY ALIN ALBU-SCH AFFER, OLIVER EIBERGER, MARKUS GREBENSTEIN, SAMI HADDADIN, CHRISTIAN OTT,
Design and Control of Variable Stiffness Actuation Systems
 Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators
 des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE
 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
Demonstrating the Benefits of Variable Impedance to Telerobotic Task Execution
 Demonstrating the Benefits of Variable Impedance to Telerobotic Task Execution Daniel S. Walker, J. Kenneth Salisbury and Günter Niemeyer Abstract Inspired by human physiology, variable impedance actuation
Demonstrating the Benefits of Variable Impedance to Telerobotic Task Execution Daniel S. Walker, J. Kenneth Salisbury and Günter Niemeyer Abstract Inspired by human physiology, variable impedance actuation
Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints
 Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION
 COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
Robots Driven by Compliant Actuators: Optimal Control under Actuation Constraints
 IEEE TRANSACTIONS ON ROBOTICS 1 Robots Driven by Compliant Actuators: Optimal Control under Actuation Constraints David J. Braun, Member, IEEE, Florian Petit, Felix Huber, Sami Haddadin, Member, IEEE,
IEEE TRANSACTIONS ON ROBOTICS 1 Robots Driven by Compliant Actuators: Optimal Control under Actuation Constraints David J. Braun, Member, IEEE, Florian Petit, Felix Huber, Sami Haddadin, Member, IEEE,
A Simplified Variable Admittance Controller Based on a Virtual Agonist-Antagonist Mechanism for Robot Joint Control
 1 A Simplified Variable Admittance Controller Based on a Virtual Agonist-Antagonist Mechanism for Robot Joint Control Xiaofeng Xiong, Florentin Wörgötter and Poramate Manoonpong the Bernstein Center for
1 A Simplified Variable Admittance Controller Based on a Virtual Agonist-Antagonist Mechanism for Robot Joint Control Xiaofeng Xiong, Florentin Wörgötter and Poramate Manoonpong the Bernstein Center for
Analyzing Achievable Stiffness Control Bounds of Robotic Hands With Coupled Finger Joints
 2017 IEEE International Conference on Robotics and Automation (ICRA) Singapore, May 29 - June 3, 2017 Analyzing Achievable Stiffness Control Bounds of Robotic Hands With Coupled Finger Joints Prashant
2017 IEEE International Conference on Robotics and Automation (ICRA) Singapore, May 29 - June 3, 2017 Analyzing Achievable Stiffness Control Bounds of Robotic Hands With Coupled Finger Joints Prashant
Decoupling Identification with Closed-loop-controlled Elements for Two-link Arm with Elastic Joints
 Preprints of the 9th International Symposium on Robot Control (SYROCO'9) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-2, 29 Decoupling Identification
Preprints of the 9th International Symposium on Robot Control (SYROCO'9) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-2, 29 Decoupling Identification
Multi-Priority Cartesian Impedance Control
 Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Multi-Priority Cartesian Impedance Control Robert Platt Jr. Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology rplatt@csail.mit.edu Muhammad Abdallah, Charles
Bi-Articular Muscle Actuation Design for Robot Arms
 Bi-Articular Muscle Actuation Design for Robot Arms V. Salvucci Y. Kimura S. Oh Y. Hori Hori-Fujimoto Lab, The University of Tokyo ICRA 2011 Workshop on Biologically-inspired Actuation, Shanghai Outline
Bi-Articular Muscle Actuation Design for Robot Arms V. Salvucci Y. Kimura S. Oh Y. Hori Hori-Fujimoto Lab, The University of Tokyo ICRA 2011 Workshop on Biologically-inspired Actuation, Shanghai Outline
A Benchmark Problem for Robust Control of a Multivariable Nonlinear Flexible Manipulator
 Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-11, 28 A Benchmark Problem for Robust Control of a Multivariable Nonlinear Flexible Manipulator
Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-11, 28 A Benchmark Problem for Robust Control of a Multivariable Nonlinear Flexible Manipulator
A HYBRID SYSTEM APPROACH TO IMPEDANCE AND ADMITTANCE CONTROL. Frank Mathis
 A HYBRID SYSTEM APPROACH TO IMPEDANCE AND ADMITTANCE CONTROL By Frank Mathis A THESIS Submitted to Michigan State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
A HYBRID SYSTEM APPROACH TO IMPEDANCE AND ADMITTANCE CONTROL By Frank Mathis A THESIS Submitted to Michigan State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
MCE493/593 and EEC492/592 Prosthesis Design and Control
 MCE493/593 and EEC492/592 Prosthesis Design and Control Control Systems Part 3 Hanz Richter Department of Mechanical Engineering 2014 1 / 25 Electrical Impedance Electrical impedance: generalization of
MCE493/593 and EEC492/592 Prosthesis Design and Control Control Systems Part 3 Hanz Richter Department of Mechanical Engineering 2014 1 / 25 Electrical Impedance Electrical impedance: generalization of
Virtual Passive Controller for Robot Systems Using Joint Torque Sensors
 NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
Robotics 2 Robot Interaction with the Environment
 Robotics 2 Robot Interaction with the Environment Prof. Alessandro De Luca Robot-environment interaction a robot (end-effector) may interact with the environment! modifying the state of the environment
Robotics 2 Robot Interaction with the Environment Prof. Alessandro De Luca Robot-environment interaction a robot (end-effector) may interact with the environment! modifying the state of the environment
Stiction Compensation in Agonist-Antagonist Variable Stiffness Actuators
 Robotics: Science and Systems 2014 Berkeley, CA, USA, July 12-16, 2014 Stiction Compensation in Agonist-Antagonist Variable Stiffness Actuators Luca Fiorio Francesco Romano Alberto Parmiggiani Giulio Sandini
Robotics: Science and Systems 2014 Berkeley, CA, USA, July 12-16, 2014 Stiction Compensation in Agonist-Antagonist Variable Stiffness Actuators Luca Fiorio Francesco Romano Alberto Parmiggiani Giulio Sandini
Soft Actuation in Cyclic Motions: Stiffness Profile Optimization for Energy Efficiency
 Soft Actuation in Cyclic Motions: Stiffness Profile Optimization for Energy Efficiency Alexandra Velasco, Manolo Garabini, Manuel G. Catalano and Antonio Bicchi Abstract In this paper, we investigate the
Soft Actuation in Cyclic Motions: Stiffness Profile Optimization for Energy Efficiency Alexandra Velasco, Manolo Garabini, Manuel G. Catalano and Antonio Bicchi Abstract In this paper, we investigate the
Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation
 German Conference on Robotics (ROBOTIK ), Springer, Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation Thomas Lens, Oskar von Stryk Simulation, Optimization and Robotics
German Conference on Robotics (ROBOTIK ), Springer, Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation Thomas Lens, Oskar von Stryk Simulation, Optimization and Robotics
Nonlinear Oscillations for Cyclic Movements in Variable Impedance Actuated Robotic Arms
 Nonlinear Oscillations for Cyclic Movements in Variable Impedance Actuated Robotic Arms Dominic Lakatos, Florian Petit, and Alin Albu-Schäffer Abstract Biologically inspired Variable Impedance Actuators
Nonlinear Oscillations for Cyclic Movements in Variable Impedance Actuated Robotic Arms Dominic Lakatos, Florian Petit, and Alin Albu-Schäffer Abstract Biologically inspired Variable Impedance Actuators
Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and Positioning Accuracy of a Robot Arm
 1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
Lecture «Robot Dynamics»: Dynamics and Control
 Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Optimal Torque and Stiffness Control in Compliantly Actuated Robots
 212 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 212. Vilamoura, Algarve, Portugal Optimal Torque and Stiffness Control in Compliantly Actuated Robots D. J. Braun,,
212 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 212. Vilamoura, Algarve, Portugal Optimal Torque and Stiffness Control in Compliantly Actuated Robots D. J. Braun,,
Dynamic model of robots:
 Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
Acknowledgements. Feedback Control of Bipedal Locomotion RAS Pioneer Award to Mark Spong. Videos and Papers
 Feedback Control of Bipedal Locomotion Acknowledgements Hae Won Park Post Doc MIT Koushil Sreenath Post Doc UPenn University of Michigan Jessy W. Grizzle Jerry W. and Carol L. Levin Professor of Engineering
Feedback Control of Bipedal Locomotion Acknowledgements Hae Won Park Post Doc MIT Koushil Sreenath Post Doc UPenn University of Michigan Jessy W. Grizzle Jerry W. and Carol L. Levin Professor of Engineering
Introduction to centralized control
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task
Case Study: The Pelican Prototype Robot
 5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
Introduction to Control (034040) lecture no. 2
 lecture no. 2") Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to centralized control
 Industrial Robots Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task velocities structured disturbance torques
Industrial Robots Control Part 2 Introduction to centralized control Independent joint decentralized control may prove inadequate when the user requires high task velocities structured disturbance torques
The skeleton algorithm for self-collision avoidance of a humanoid manipulator
 The skeleton algorithm for self-collision avoidance of a humanoid manipulator Agostino De Santis, Alin Albu Schäffer, Christian Ott, Bruno Siciliano, and Gerd Hirzinger Abstract For use in unstructured
The skeleton algorithm for self-collision avoidance of a humanoid manipulator Agostino De Santis, Alin Albu Schäffer, Christian Ott, Bruno Siciliano, and Gerd Hirzinger Abstract For use in unstructured
Dynamic model of robots:
 Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
Robotics I. Test November 29, 2013
 Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Video 8.1 Vijay Kumar. Property of University of Pennsylvania, Vijay Kumar
 Video 8.1 Vijay Kumar 1 Definitions State State equations Equilibrium 2 Stability Stable Unstable Neutrally (Critically) Stable 3 Stability Translate the origin to x e x(t) =0 is stable (Lyapunov stable)
Video 8.1 Vijay Kumar 1 Definitions State State equations Equilibrium 2 Stability Stable Unstable Neutrally (Critically) Stable 3 Stability Translate the origin to x e x(t) =0 is stable (Lyapunov stable)
Multiple-priority impedance control
 Multiple-priority impedance control Robert Platt Jr, Muhammad Abdallah, and Charles Wampler Abstract Impedance control is well-suited to robot manipulation applications because it gives the designer a
Multiple-priority impedance control Robert Platt Jr, Muhammad Abdallah, and Charles Wampler Abstract Impedance control is well-suited to robot manipulation applications because it gives the designer a
Impedance control using a cascaded loop force control
 Impedance control using a cascaded loop force control Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin, Maxime Gautier To cite this version: Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin,
Impedance control using a cascaded loop force control Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin, Maxime Gautier To cite this version: Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin,
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL
 GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
INSTRUCTIONS TO CANDIDATES:
 NATIONAL NIVERSITY OF SINGAPORE FINAL EXAMINATION FOR THE DEGREE OF B.ENG ME 444 - DYNAMICS AND CONTROL OF ROBOTIC SYSTEMS October/November 994 - Time Allowed: 3 Hours INSTRCTIONS TO CANDIDATES:. This
NATIONAL NIVERSITY OF SINGAPORE FINAL EXAMINATION FOR THE DEGREE OF B.ENG ME 444 - DYNAMICS AND CONTROL OF ROBOTIC SYSTEMS October/November 994 - Time Allowed: 3 Hours INSTRCTIONS TO CANDIDATES:. This
Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots
 IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
Biomimetic motor behavior for simultaneous adaptation of force, impedance and trajectory in interaction tasks
 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Biomimetic motor behavior for simultaneous adaptation of force, impedance
2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Biomimetic motor behavior for simultaneous adaptation of force, impedance
Unified Impedance and Admittance Control
 21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Unified Impedance and Admittance Christian Ott, Ranjan Mukherjee, and Yoshihiko
21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA Unified Impedance and Admittance Christian Ott, Ranjan Mukherjee, and Yoshihiko
Variable Stiffness Control for Oscillation Damping
 15 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 8 - Oct 15. Hamburg Germany Variable Stiffness Control for Oscillation Damping G. M. Gasparri
15 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Congress Center Hamburg Sept 8 - Oct 15. Hamburg Germany Variable Stiffness Control for Oscillation Damping G. M. Gasparri
A Modally Adaptive Control for Multi-Contact Cyclic Motions in Compliantly Actuated Robotic Systems
 A Modally Adaptive Control for Multi-Contact Cyclic Motions in Compliantly Actuated Robotic Systems Dominic Lakatos, Martin Görner, Florian Petit, Alexander Dietrich, and Alin Albu-Schäffer Abstract Compliant
A Modally Adaptive Control for Multi-Contact Cyclic Motions in Compliantly Actuated Robotic Systems Dominic Lakatos, Martin Görner, Florian Petit, Alexander Dietrich, and Alin Albu-Schäffer Abstract Compliant
Soft Robotics for the Hydraulic Atlas Arms: Joint Impedance Control with Collision Detection and Disturbance Compensation
 This is the author's version of an article that has been published in the IROS 216 proceedings. The final version of record is available at http://dx.doi.org/1.119/iros.216.7759517 Soft Robotics for the
This is the author's version of an article that has been published in the IROS 216 proceedings. The final version of record is available at http://dx.doi.org/1.119/iros.216.7759517 Soft Robotics for the
A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT
 A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT Florentina Adascalitei 1, Ioan Doroftei 1, Ovidiu Crivoi 1, Bram Vanderborght, Dirk Lefeber 1 "Gh. Asachi" Technical University
A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT Florentina Adascalitei 1, Ioan Doroftei 1, Ovidiu Crivoi 1, Bram Vanderborght, Dirk Lefeber 1 "Gh. Asachi" Technical University
Robotics & Automation. Lecture 25. Dynamics of Constrained Systems, Dynamic Control. John T. Wen. April 26, 2007
 Robotics & Automation Lecture 25 Dynamics of Constrained Systems, Dynamic Control John T. Wen April 26, 2007 Last Time Order N Forward Dynamics (3-sweep algorithm) Factorization perspective: causal-anticausal
Robotics & Automation Lecture 25 Dynamics of Constrained Systems, Dynamic Control John T. Wen April 26, 2007 Last Time Order N Forward Dynamics (3-sweep algorithm) Factorization perspective: causal-anticausal
Robotics I. Classroom Test November 21, 2014
 Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Adaptive Robust Tracking Control of Robot Manipulators in the Task-space under Uncertainties
 Australian Journal of Basic and Applied Sciences, 3(1): 308-322, 2009 ISSN 1991-8178 Adaptive Robust Tracking Control of Robot Manipulators in the Task-space under Uncertainties M.R.Soltanpour, M.M.Fateh
Australian Journal of Basic and Applied Sciences, 3(1): 308-322, 2009 ISSN 1991-8178 Adaptive Robust Tracking Control of Robot Manipulators in the Task-space under Uncertainties M.R.Soltanpour, M.M.Fateh
MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question.
 Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A 4.8-kg block attached to a spring executes simple harmonic motion on a frictionless
Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A 4.8-kg block attached to a spring executes simple harmonic motion on a frictionless
Theory of Vibrations in Stewart Platforms
 Theory of Vibrations in Stewart Platforms J.M. Selig and X. Ding School of Computing, Info. Sys. & Maths. South Bank University London SE1 0AA, U.K. (seligjm@sbu.ac.uk) Abstract This article develops a
Theory of Vibrations in Stewart Platforms J.M. Selig and X. Ding School of Computing, Info. Sys. & Maths. South Bank University London SE1 0AA, U.K. (seligjm@sbu.ac.uk) Abstract This article develops a
Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic Actuation Systems
 211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
Balancing of an Inverted Pendulum with a SCARA Robot
 Balancing of an Inverted Pendulum with a SCARA Robot Bernhard Sprenger, Ladislav Kucera, and Safer Mourad Swiss Federal Institute of Technology Zurich (ETHZ Institute of Robotics 89 Zurich, Switzerland
Balancing of an Inverted Pendulum with a SCARA Robot Bernhard Sprenger, Ladislav Kucera, and Safer Mourad Swiss Federal Institute of Technology Zurich (ETHZ Institute of Robotics 89 Zurich, Switzerland
ARTISAN ( ) ARTISAN ( ) Human-Friendly Robot Design
 ARTISAN ( ) Human-Friendly Robot Design") Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
Rigid Manipulator Control
 Rigid Manipulator Control The control problem consists in the design of control algorithms for the robot motors, such that the TCP motion follows a specified task in the cartesian space Two types of task
Rigid Manipulator Control The control problem consists in the design of control algorithms for the robot motors, such that the TCP motion follows a specified task in the cartesian space Two types of task
Iterative Motion Primitive Learning and Refinement by Compliant Motion Control
 Iterative Motion Primitive Learning and Refinement by Compliant Motion Control Dongheui Lee and Christian Ott Abstract We present an approach for motion primitive learning and refinement for a humanoid
Iterative Motion Primitive Learning and Refinement by Compliant Motion Control Dongheui Lee and Christian Ott Abstract We present an approach for motion primitive learning and refinement for a humanoid
Decoupled torque control of tendon-driven fingers with tension management
 Decoupled torque control of tendon-driven fingers with tension management The International Journal of Robotics Research 32(2) 247 258 The Author(s) 213 Reprints and permission: sagepub.co.uk/journalspermissions.nav
Decoupled torque control of tendon-driven fingers with tension management The International Journal of Robotics Research 32(2) 247 258 The Author(s) 213 Reprints and permission: sagepub.co.uk/journalspermissions.nav
Design and Control of Anthropomorphic BIT Soft Arms for TCM Remedial Massage
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Design and Control of Anthropomorphic BIT Soft Arms for TCM Remedial Massage Yuancan Huang
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Design and Control of Anthropomorphic BIT Soft Arms for TCM Remedial Massage Yuancan Huang
Novel Reaction Force Control Design Based on Biarticular Driving System Using Intrinsic Viscoelasticity of Muscle
 Novel Reaction Force Control Design Based on Biarticular Driving System Using Intrinsic Viscoelasticity of Muscle Yasuto Kimura #, Sehoon Oh 2 and Yoichi Hori #3 # Department of Advanced Energy, The University
Novel Reaction Force Control Design Based on Biarticular Driving System Using Intrinsic Viscoelasticity of Muscle Yasuto Kimura #, Sehoon Oh 2 and Yoichi Hori #3 # Department of Advanced Energy, The University
Robust Control of Cooperative Underactuated Manipulators
 Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
Robust Control of Cooperative Underactuated Manipulators Marcel Bergerman * Yangsheng Xu +,** Yun-Hui Liu ** * Automation Institute Informatics Technology Center Campinas SP Brazil + The Robotics Institute
q 1 F m d p q 2 Figure 1: An automated crane with the relevant kinematic and dynamic definitions.
 Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
Robotics II March 7, 018 Exercise 1 An automated crane can be seen as a mechanical system with two degrees of freedom that moves along a horizontal rail subject to the actuation force F, and that transports
The 9th Int. Conf. on Motion and Vibration Control (MOVIC), Munich, Germany, Sept An Industrial-Robots Suited Input Shaping Control Scheme
, Munich, Germany, Sept An Industrial-Robots Suited Input Shaping Control Scheme") The 9th Int. Conf. on Motion and Vibration Control (MOVIC), Munich, Germany, Sept. 28 An Industrial-Robots Suited Input Shaping Control Scheme Amine Kamel, Friedrich Lange, Gerd Hirzinger Abstract Compliance
The 9th Int. Conf. on Motion and Vibration Control (MOVIC), Munich, Germany, Sept. 28 An Industrial-Robots Suited Input Shaping Control Scheme Amine Kamel, Friedrich Lange, Gerd Hirzinger Abstract Compliance
Rigid Part Mating. Goals of this class
 Rigid Part Mating Goals of this class understand the phases of a typical part mate determine the basic scaling laws understand basic physics of part mating for simple geometries relate forces and motions
Rigid Part Mating Goals of this class understand the phases of a typical part mate determine the basic scaling laws understand basic physics of part mating for simple geometries relate forces and motions
Lecture 6 mechanical system modeling equivalent mass gears
 M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
Development of Distributed Optical Torque Sensors for Realization of Local Impedance Control of the Robot Arm
 Development of Distributed Optical Torque Sensors for Realization of Local Impedance Control of the Robot Arm Dzmitry Tsetserukou, Riichiro Tadakuma, Hiroyuki Kajimoto and Susumu Tachi Graduate School
Development of Distributed Optical Torque Sensors for Realization of Local Impedance Control of the Robot Arm Dzmitry Tsetserukou, Riichiro Tadakuma, Hiroyuki Kajimoto and Susumu Tachi Graduate School
Lecture «Robot Dynamics»: Dynamics 2
 Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Inverse differential kinematics Statics and force transformations
 Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Robotics 1 Inverse differential kinematics Statics and force transformations Prof Alessandro De Luca Robotics 1 1 Inversion of differential kinematics! find the joint velocity vector that realizes a desired
Nonlinear PD Controllers with Gravity Compensation for Robot Manipulators
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 4, No Sofia 04 Print ISSN: 3-970; Online ISSN: 34-408 DOI: 0.478/cait-04-00 Nonlinear PD Controllers with Gravity Compensation
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 4, No Sofia 04 Print ISSN: 3-970; Online ISSN: 34-408 DOI: 0.478/cait-04-00 Nonlinear PD Controllers with Gravity Compensation
Robot Manipulator Control. Hesheng Wang Dept. of Automation
 Robot Manipulator Control Hesheng Wang Dept. of Automation Introduction Industrial robots work based on the teaching/playback scheme Operators teach the task procedure to a robot he robot plays back eecute
Robot Manipulator Control Hesheng Wang Dept. of Automation Introduction Industrial robots work based on the teaching/playback scheme Operators teach the task procedure to a robot he robot plays back eecute
Vibration Suppression Control of a Space Robot with Flexible Appendage based on Simple Dynamic Model*
 213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213 Tokyo, Japan Vibration Suppression Control of a Space Robot with Flexible Appendage based on Simple Dynamic
213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213 Tokyo, Japan Vibration Suppression Control of a Space Robot with Flexible Appendage based on Simple Dynamic
557. Radial correction controllers of gyroscopic stabilizer
 557. Radial correction controllers of gyroscopic stabilizer M. Sivčák 1, J. Škoda, Technical University in Liberec, Studentská, Liberec, Czech Republic e-mail: 1 michal.sivcak@tul.cz; jan.skoda@pevnosti.cz
557. Radial correction controllers of gyroscopic stabilizer M. Sivčák 1, J. Škoda, Technical University in Liberec, Studentská, Liberec, Czech Republic e-mail: 1 michal.sivcak@tul.cz; jan.skoda@pevnosti.cz
Identification of Joint Impedance
 Identification of Joint Impedance tools for understanding the human motion system, treatment selection and evaluation Lecture 12 SIPE 2010 Case Studies Erwin de Vlugt, PhD -Leiden Research Connection Laboratory
Identification of Joint Impedance tools for understanding the human motion system, treatment selection and evaluation Lecture 12 SIPE 2010 Case Studies Erwin de Vlugt, PhD -Leiden Research Connection Laboratory
Neural Network Control of Robot Manipulators and Nonlinear Systems
 Neural Network Control of Robot Manipulators and Nonlinear Systems F.L. LEWIS Automation and Robotics Research Institute The University of Texas at Arlington S. JAG ANNATHAN Systems and Controls Research
Neural Network Control of Robot Manipulators and Nonlinear Systems F.L. LEWIS Automation and Robotics Research Institute The University of Texas at Arlington S. JAG ANNATHAN Systems and Controls Research
Advanced Robotic Manipulation
 Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
Advanced Robotic Manipulation Handout CS37A (Spring 017 Solution Set # Problem 1 - Redundant robot control The goal of this problem is to familiarize you with the control of a robot that is redundant with
Compact Variable Stiffness Joint with Force Sensing Ability-Application to Classify Contact Surfaces
 Compact Variable Stiffness Joint with Force Sensing Ability-Application to Classify Contact Surfaces Shinya Kajikawa and Aruto Suzuki Department of Mechanical Engineering and Intelligent Systems, Tohoku
Compact Variable Stiffness Joint with Force Sensing Ability-Application to Classify Contact Surfaces Shinya Kajikawa and Aruto Suzuki Department of Mechanical Engineering and Intelligent Systems, Tohoku
1.053J/2.003J Dynamics and Control I Fall Final Exam 18 th December, 2007
 1.053J/2.003J Dynamics and Control I Fall 2007 Final Exam 18 th December, 2007 Important Notes: 1. You are allowed to use three letter-size sheets (two-sides each) of notes. 2. There are five (5) problems
1.053J/2.003J Dynamics and Control I Fall 2007 Final Exam 18 th December, 2007 Important Notes: 1. You are allowed to use three letter-size sheets (two-sides each) of notes. 2. There are five (5) problems
VII. References. IEEE Intl. Conf. on Robotics and Automation,
 VII. References [] Alexander, R. McNeill, Elastic Mechanisms in Animal Movement, Cambridge University Press, 988. [] Angle, C.M. and Brooks, R.A., Small Planetary Rovers, IEEE International Workshop on
VII. References [] Alexander, R. McNeill, Elastic Mechanisms in Animal Movement, Cambridge University Press, 988. [] Angle, C.M. and Brooks, R.A., Small Planetary Rovers, IEEE International Workshop on
Series Elasticity Load. Gear Train. Motor. I. Introduction
 Preprints of the Fourth International Symposium on Experimental Robotics, ISER 95 Stanford, California, June July, 995 Stiffness Isn t Everything Gill A. Pratt, Matthew M. Williamson, Peter Dillworth,
Preprints of the Fourth International Symposium on Experimental Robotics, ISER 95 Stanford, California, June July, 995 Stiffness Isn t Everything Gill A. Pratt, Matthew M. Williamson, Peter Dillworth,
Whole-body impedance control of wheeled mobile manipulators
 Auton Robot (2016 40:505 517 DOI 10.1007/s10514-015-9438-z Whole-body impedance control of wheeled mobile manipulators Stability analysis and experiments on the humanoid robot Rollin Justin Alexander Dietrich
Auton Robot (2016 40:505 517 DOI 10.1007/s10514-015-9438-z Whole-body impedance control of wheeled mobile manipulators Stability analysis and experiments on the humanoid robot Rollin Justin Alexander Dietrich
available online at CONTROL OF THE DOUBLE INVERTED PENDULUM ON A CART USING THE NATURAL MOTION
 Acta Polytechnica 3(6):883 889 3 Czech Technical University in Prague 3 doi:.43/ap.3.3.883 available online at http://ojs.cvut.cz/ojs/index.php/ap CONTROL OF THE DOUBLE INVERTED PENDULUM ON A CART USING
Acta Polytechnica 3(6):883 889 3 Czech Technical University in Prague 3 doi:.43/ap.3.3.883 available online at http://ojs.cvut.cz/ojs/index.php/ap CONTROL OF THE DOUBLE INVERTED PENDULUM ON A CART USING
Robotics, Geometry and Control - A Preview
 Robotics, Geometry and Control - A Preview Ravi Banavar 1 1 Systems and Control Engineering IIT Bombay HYCON-EECI Graduate School - Spring 2008 Broad areas Types of manipulators - articulated mechanisms,
Robotics, Geometry and Control - A Preview Ravi Banavar 1 1 Systems and Control Engineering IIT Bombay HYCON-EECI Graduate School - Spring 2008 Broad areas Types of manipulators - articulated mechanisms,
Towards Accurate Force Control of Series Elastic Actuators Exploiting a Robust Transmission Force Observer
 Towards Accurate Force Control of Series Elastic Actuators Exploiting a Robust Transmission Force Observer Chan Lee 1, Jinoh Lee 2, and Sehoon Oh 1 arxiv:1902.05338v1 [cs.ro] 14 Feb 2019 Abstract This
Towards Accurate Force Control of Series Elastic Actuators Exploiting a Robust Transmission Force Observer Chan Lee 1, Jinoh Lee 2, and Sehoon Oh 1 arxiv:1902.05338v1 [cs.ro] 14 Feb 2019 Abstract This
Modelling and Interactional Control of a Multi-fingered Robotic Hand for Grasping and Manipulation.
 Modelling and Interactional Control of a Multi-fingered Robotic Hand for Grasping and Manipulation. Hasan, Md Rakibul The copyright of this thesis rests with the author and no quotation from it or information
Modelling and Interactional Control of a Multi-fingered Robotic Hand for Grasping and Manipulation. Hasan, Md Rakibul The copyright of this thesis rests with the author and no quotation from it or information
Perturbation Method in the Analysis of Manipulator Inertial Vibrations
 Mechanics and Mechanical Engineering Vol. 15, No. 2 (2011) 149 160 c Technical University of Lodz Perturbation Method in the Analysis of Manipulator Inertial Vibrations Przemys law Szumiński Division of
Mechanics and Mechanical Engineering Vol. 15, No. 2 (2011) 149 160 c Technical University of Lodz Perturbation Method in the Analysis of Manipulator Inertial Vibrations Przemys law Szumiński Division of
LUMPED MASS MODELLING WITH APPLICATIONS
 LUMPED MASS MODELLING WITH APPLICATIONS July, 8, 07 Lumped Mass Modelling with Applications . Motivation. Some examples 3. Basic control scheme 4. Single joint single link - single mass INDEX 5. Extensions
LUMPED MASS MODELLING WITH APPLICATIONS July, 8, 07 Lumped Mass Modelling with Applications . Motivation. Some examples 3. Basic control scheme 4. Single joint single link - single mass INDEX 5. Extensions
Force Control on Antagonistic Twist-drive Actuator Robot
 6 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Daejeon Convention Center October 9-, 6, Daejeon, Korea Force Control on Antagonistic Twist-drive Actuator Robot Takahiro Inoue,
6 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Daejeon Convention Center October 9-, 6, Daejeon, Korea Force Control on Antagonistic Twist-drive Actuator Robot Takahiro Inoue,
Joint Torque Control for Backlash Compensation in Two-Inertia System
 Joint Torque Control for Backlash Compensation in Two-Inertia System Shota Yamada*, Hiroshi Fujimoto** The University of Tokyo 5--5, Kashiwanoha, Kashiwa, Chiba, 227-856 Japan Phone: +8-4-736-3873*, +8-4-736-43**
Joint Torque Control for Backlash Compensation in Two-Inertia System Shota Yamada*, Hiroshi Fujimoto** The University of Tokyo 5--5, Kashiwanoha, Kashiwa, Chiba, 227-856 Japan Phone: +8-4-736-3873*, +8-4-736-43**
Coupling between the Output Force and Stiffness in Different Variable Stiffness Actuators
 Actuators 014, 3, 70-84; doi:10.3390/act303070 Article OPEN ACCESS actuators ISSN 076-085 www.mdpi.com/journal/actuators Coupling between the Output Force and Stiffness in Different Variable Stiffness
Actuators 014, 3, 70-84; doi:10.3390/act303070 Article OPEN ACCESS actuators ISSN 076-085 www.mdpi.com/journal/actuators Coupling between the Output Force and Stiffness in Different Variable Stiffness
Emulation of an Animal Limb with Two Degrees of Freedom using HIL
 Emulation of an Animal Limb with Two Degrees of Freedom using HIL Iván Bautista Gutiérrez, Fabián González Téllez, Dario Amaya H. Abstract The Bio-inspired robotic systems have been a focus of great interest
Emulation of an Animal Limb with Two Degrees of Freedom using HIL Iván Bautista Gutiérrez, Fabián González Téllez, Dario Amaya H. Abstract The Bio-inspired robotic systems have been a focus of great interest
Stiffness estimation for flexible transmissions
 SICURA@SIDRA 2010 13 Settembre L Aquila Stiffness estimation for flexible transmissions Fabrizio Flacco Alessandro De Luca Dipartimento di Informatica e Sistemistica Motivation Why we need to know the
SICURA@SIDRA 2010 13 Settembre L Aquila Stiffness estimation for flexible transmissions Fabrizio Flacco Alessandro De Luca Dipartimento di Informatica e Sistemistica Motivation Why we need to know the
MECH 3140 Final Project
 MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
Optimal Ankle Compliance Regulation for Humanoid Balancing Control
 13 EEE/RSJ nternational Conference on ntelligent Robots and Systems (ROS) November 3-7 13. Tokyo Japan Optimal Ankle Compliance Regulation for Humanoid Balancing Control Mohamad Mosadeghzad Zhibin Li Nikos
13 EEE/RSJ nternational Conference on ntelligent Robots and Systems (ROS) November 3-7 13. Tokyo Japan Optimal Ankle Compliance Regulation for Humanoid Balancing Control Mohamad Mosadeghzad Zhibin Li Nikos
Linköping University Electronic Press
 Linköping University Electronic Press Report Simulation Model of a 2 Degrees of Freedom Industrial Manipulator Patrik Axelsson Series: LiTH-ISY-R, ISSN 400-3902, No. 3020 ISRN: LiTH-ISY-R-3020 Available
Linköping University Electronic Press Report Simulation Model of a 2 Degrees of Freedom Industrial Manipulator Patrik Axelsson Series: LiTH-ISY-R, ISSN 400-3902, No. 3020 ISRN: LiTH-ISY-R-3020 Available
A Backstepping control strategy for constrained tendon driven robotic finger
 A Backstepping control strategy for constrained tendon driven robotic finger Kunal Sanjay Narkhede 1, Aashay Anil Bhise 2, IA Sainul 3, Sankha Deb 4 1,2,4 Department of Mechanical Engineering, 3 Advanced
A Backstepping control strategy for constrained tendon driven robotic finger Kunal Sanjay Narkhede 1, Aashay Anil Bhise 2, IA Sainul 3, Sankha Deb 4 1,2,4 Department of Mechanical Engineering, 3 Advanced
Trajectory Planning from Multibody System Dynamics
 Trajectory Planning from Multibody System Dynamics Pierangelo Masarati Politecnico di Milano Dipartimento di Ingegneria Aerospaziale Manipulators 2 Manipulator: chain of
Trajectory Planning from Multibody System Dynamics Pierangelo Masarati Politecnico di Milano Dipartimento di Ingegneria Aerospaziale Manipulators 2 Manipulator: chain of