ARTISAN ( ) ARTISAN ( ) Human-Friendly Robot Design
|
|
|
- Ronald Parks
- 6 years ago
- Views:
Transcription



")
1 Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN ( ) ARTISAN ( ) 1




2 intelligence for mechanisms Safety Human-Friendly Robots Human-Friendly Robots Requirements Safety Performance Competing? Dependable & Safe Soft Actuators Light Structures Impact-Reduction Skin Low Reflected Inertia Distributed Sensing Good Performance Technology Puma Conventional Geared Drive: Lighter structure Large reflected actuator inertia Puma Effective Joint Inertia Effective Inertia (J link + N 2 J motor ) J link Heavy structure J motor N gear A A diag N J 2 rigid body ( i motor i ) 2
3 Safety Metric Normalized Effective Mass Safety Metric Normalized Effective Mass PUMA560 (Payload 20N) 1.16 Human (Payload 60N) 0.04 PUMA560 (Payload 22N) 1.16 Human (Payload 62N) 0.04 DM 2 (Payload 60N) 0.06 Safety Metric Normalized Effective Mass PUMA560 (Payload 22N) 1.16 Human (Payload 62N) 0.04 DM 2 (Payload 60N) Safety Metric Normalized Effective Mass 0.06 s2 (Payload 33N) 0.02 Inertia Property Effective Inertia/mass perceived in a direction u ( ) u T u 1 1 u u E : Acceleration Capacity Torque to Acceleration Transmission 3


 Actuation")
 Approach Assumed")






4 Acceleration Capacity Optimized Design Initial Design Optimized Design Why Are Robotic Arms Unsafe? Robot Collision Head Injury Criteria (HIC) Actuation Requirements Distributed Macro Mini (DM 2 ) Approach Assumed Torque Requirements Torque Magnitude Frequency Actual Torque Requirements Torque Vs Frequency: Square Wave Parallel Actuation Small Joint Actuator Torque Magnitude + Elastic Coupling Large Base Actuator Frequency Robot Characteristics Robot Collision Effective Inertia at Contact Equivalent Mass-Spring Model Effective Inertia Effective Stiffness Impact Velocity I a 1 T u u 1 v J A J 1 1 T v v 4
")



5 Effective Stiffness Impact Velocity 2 Ke K cos with k k k a h Manipulator Safety Index (MSI) Manipulator Safety Index (MSI) Variation with contact point Interface Stiffness constant at 20KN/m Manipulator Safety Index (MSI) DM2 - Human-Friendly Robot Variation with Configuration Interface Stiffness constant at 20KN/m the high capacity of a large robot with the fast dynamics and safety of a small one 5
 + DM 2 New Testbed DM2 vs.")


 PUMA 560 (link 2 and")
 HFR (Macro actuation): 12.")


6 Base actuator (low frequency) Joint actuator (high frequency) + DM 2 New Testbed DM2 vs. PUMA 560: Effective Mass Comparison Torque Magnitude Macro actuator Brushed DC motor Maximum effective mass: PUMA 560: kg Mini actuator Brushless motor Elastic Coupler (Torsional Spring) PUMA 560 (link 2 and link 3) HFR (conventional actuation) HFR (DM 2 actuation) HFR (Macro actuation): kg HFR (DM 2 actuation): 2.81 kg DM 2 Performance Distributed Macro-Mini Actuation DM 2 10x reduction in effective inertia 3x increase in position control bandwidth 10x decrease in trajectory tracking error Safety AND Performance 6





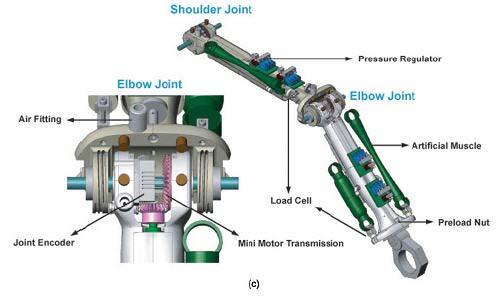
7 DM2 - Hybrid Actuation DM2 - Hybrid Actuation artificial muscles with compact pressure regulators pneumatic artificial muscles DM2 - Hybrid Actuation DM2 - Hybrid Actuation pneumatic artificial muscles pneumatic artificial muscles DM2 - Hybrid Actuation DM2 - Hybrid Actuation pneumatic artificial muscles pneumatic artificial muscles 7

Nm force@effector 14N Stanford Human-Safe Robot 0.14 4 0.12 3.5 0.1 3 Torque [ Nm ] 0.08 0.06 0.")
![04 Position [ deg ] 2.5 2 1.5 0.02 1 Desired Torque 0 Macro DM 2-0.02 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.](/docs-images/78/78062600/images/8-5.jpg "4 Time [ sec ] U1 Pressure Regulator 0.5 0 Desired Position M acro DM 2 0.4 0.6 0.8 1 1.2 1.4 1.")
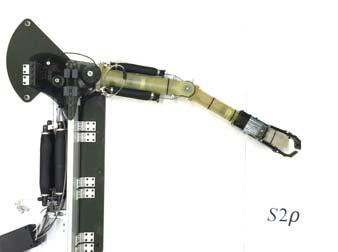
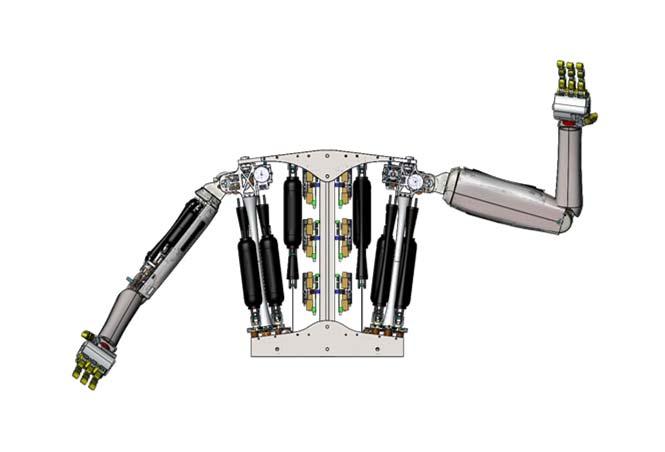
8 DM2 - Hybrid Actuation Human-Friendly Robot Design DM2 artificial muscles with compact pressure regulators s2 : Stanford Human-Safe Robot S2. : Stanford Human-Safe Robot S2. muscle 4bar upper arm 34cm lower arm 29cm total mass 1.5kg torque (7.5,5.0)Nm mini (1.0,0.3)Nm force@effector 14N Stanford Human-Safe Robot Torque [ Nm ] Position [ deg ] Desired Torque 0 Macro DM Time [ sec ] U1 Pressure Regulator Desired Position M acro DM Time [ sec ] Ps P1 Load Cells P2 F1 F2 Tj,θ Macro 0.5Hz Macro/Tension 7.0Hz Macro/Mini. 35Hz Pressure Regulator U2 8
 s2")





9 Virtual Wall (macro only/macro-mini) s2 1.5: New Design s2 1.5 : New Design Safety Comparison s2 : Stanford Human-Safe Robot s2 Effective Mass: 1.2Kg DM 2 Effective Mass: 3.5Kg Human Effective Mass: 2.1Kg PUMA560 Effective Mass: 25Kg 9







10 s2 : Stanford Human-Safe Robot 2 : Stanford Safety Robot Impact-reducing proximity and pressure sensing Skin using SDM : New Design 2 Testbed Pneumatic Muscle (low frequency) Electrical Motor (high frequency) + 2 Experimental Results Macro Macro + Mini Safety Comparison Position Force 6Hz 26Hz 10

11 Safety Comparison 2 : Motion Range(sine wave) 2 : Contact Force Control 11
Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots
 IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic Actuation Systems
 211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
Analysis of Torque Capacities in Hybrid Actuation for Human-Friendly Robot Design
 1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Analysis of Torque Capacities in Hybrid Actuation for Human-Friendly Robot Design
1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Analysis of Torque Capacities in Hybrid Actuation for Human-Friendly Robot Design
Variable Stiffness Actuators for Fast and Safe Motion Control
 Variable Stiffness Actuators for Fast and Safe Motion Control Antonio Bicchi 1, Giovanni Tonietti 1, Michele Bavaro 1, and Marco Piccigallo 1 Centro Interdipartimentale di Ricerca E. Piaggio Università
Variable Stiffness Actuators for Fast and Safe Motion Control Antonio Bicchi 1, Giovanni Tonietti 1, Michele Bavaro 1, and Marco Piccigallo 1 Centro Interdipartimentale di Ricerca E. Piaggio Università
Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and Positioning Accuracy of a Robot Arm
 1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation
 German Conference on Robotics (ROBOTIK ), Springer, Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation Thomas Lens, Oskar von Stryk Simulation, Optimization and Robotics
German Conference on Robotics (ROBOTIK ), Springer, Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation Thomas Lens, Oskar von Stryk Simulation, Optimization and Robotics
EFFECTIVE DYNAMIC STIFFNESS MODEL AND ITS EFFECTS ON ROBOT SAFETY AND PERFORMANCE. Dongjun Shin 1 and Zhan Fan Quek 2
 EFFECTIVE DYNAMIC STIFFNESS MODEL AND ITS EFFECTS ON ROBOT SAFETY AND PERFORMANCE Dongjun Shin 1 and Zhan Fan Quek 2 1 Artificial Intelligence Laboratory, Stanford University, Stanford, CA, U.S.A. 2 Mechanical
EFFECTIVE DYNAMIC STIFFNESS MODEL AND ITS EFFECTS ON ROBOT SAFETY AND PERFORMANCE Dongjun Shin 1 and Zhan Fan Quek 2 1 Artificial Intelligence Laboratory, Stanford University, Stanford, CA, U.S.A. 2 Mechanical
Stress Analysis Lecture 3 ME 276 Spring Dr./ Ahmed Mohamed Nagib Elmekawy
 Stress Analysis Lecture 3 ME 276 Spring 2017-2018 Dr./ Ahmed Mohamed Nagib Elmekawy Axial Stress 2 Beam under the action of two tensile forces 3 Beam under the action of two tensile forces 4 Shear Stress
Stress Analysis Lecture 3 ME 276 Spring 2017-2018 Dr./ Ahmed Mohamed Nagib Elmekawy Axial Stress 2 Beam under the action of two tensile forces 3 Beam under the action of two tensile forces 4 Shear Stress
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE
 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
Selection of Servomotors and Reducer Units for a 2 DoF PKM
 Selection of Servomotors and Reducer Units for a 2 DoF PKM Hermes GIBERTI, Simone CINQUEMANI Mechanical Engineering Department, Politecnico di Milano, Campus Bovisa Sud, via La Masa 34, 20156, Milano,
Selection of Servomotors and Reducer Units for a 2 DoF PKM Hermes GIBERTI, Simone CINQUEMANI Mechanical Engineering Department, Politecnico di Milano, Campus Bovisa Sud, via La Masa 34, 20156, Milano,
Lecture «Robot Dynamics»: Dynamics and Control
 Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
ADAPTIVE NEURAL NETWORK CONTROL OF MECHATRONICS OBJECTS
 acta mechanica et automatica, vol.2 no.4 (28) ADAPIE NEURAL NEWORK CONROL OF MECHARONICS OBJECS Egor NEMSE *, Yuri ZHUKO * * Baltic State echnical University oenmeh, 985, St. Petersburg, Krasnoarmeyskaya,
acta mechanica et automatica, vol.2 no.4 (28) ADAPIE NEURAL NEWORK CONROL OF MECHARONICS OBJECS Egor NEMSE *, Yuri ZHUKO * * Baltic State echnical University oenmeh, 985, St. Petersburg, Krasnoarmeyskaya,
Design and Control of Variable Stiffness Actuation Systems
 Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators
 des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
D : SOLID MECHANICS. Q. 1 Q. 9 carry one mark each.
 GTE 2016 Q. 1 Q. 9 carry one mark each. D : SOLID MECHNICS Q.1 single degree of freedom vibrating system has mass of 5 kg, stiffness of 500 N/m and damping coefficient of 100 N-s/m. To make the system
GTE 2016 Q. 1 Q. 9 carry one mark each. D : SOLID MECHNICS Q.1 single degree of freedom vibrating system has mass of 5 kg, stiffness of 500 N/m and damping coefficient of 100 N-s/m. To make the system
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING. Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582
 NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING NMT EE 589 & UNM ME 482/582 Simplified drive train model of a robot joint Inertia seen by the motor Link k 1 I I D ( q) k mk 2 kk Gk Torque amplification G
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING NMT EE 589 & UNM ME 482/582 Simplified drive train model of a robot joint Inertia seen by the motor Link k 1 I I D ( q) k mk 2 kk Gk Torque amplification G
Design and Control of Compliant Humanoids. Alin Albu-Schäffer. DLR German Aerospace Center Institute of Robotics and Mechatronics
 Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
Nonlinear PD Controllers with Gravity Compensation for Robot Manipulators
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 4, No Sofia 04 Print ISSN: 3-970; Online ISSN: 34-408 DOI: 0.478/cait-04-00 Nonlinear PD Controllers with Gravity Compensation
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 4, No Sofia 04 Print ISSN: 3-970; Online ISSN: 34-408 DOI: 0.478/cait-04-00 Nonlinear PD Controllers with Gravity Compensation
A Park - like transform for fluid power systems : application to pneumatic stiffness control
 Laboratoire Ampère Unité Mixte de Recherche CNRS Génie Électrique, Électromagnétisme, Automatique, Microbiologie Environnementale et Applications A Park - like transform for fluid power systems : application
Laboratoire Ampère Unité Mixte de Recherche CNRS Génie Électrique, Électromagnétisme, Automatique, Microbiologie Environnementale et Applications A Park - like transform for fluid power systems : application
Virtual Passive Controller for Robot Systems Using Joint Torque Sensors
 NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
NASA Technical Memorandum 110316 Virtual Passive Controller for Robot Systems Using Joint Torque Sensors Hal A. Aldridge and Jer-Nan Juang Langley Research Center, Hampton, Virginia January 1997 National
Robotics I. Test November 29, 2013
 Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
Exercise 1 [6 points] Robotics I Test November 9, 013 A DC motor is used to actuate a single robot link that rotates in the horizontal plane around a joint axis passing through its base. The motor is connected
151H0653H00L Bio-Inspired Motor Control
 Lecture 10 151H0653H00L Bio-Inspired Motor Control Fumiya Iida, Jonas Buchli Luzius Brodbeck, Derek Leach, Xiaoxiang Yu, Amir Jafari, Hugo Marques, Liyu Wang, Surya Nurzaman 11/20/2012 1 Lecture 10 Today
Lecture 10 151H0653H00L Bio-Inspired Motor Control Fumiya Iida, Jonas Buchli Luzius Brodbeck, Derek Leach, Xiaoxiang Yu, Amir Jafari, Hugo Marques, Liyu Wang, Surya Nurzaman 11/20/2012 1 Lecture 10 Today
Robotics I. Classroom Test November 21, 2014
 Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
Robotics I Classroom Test November 21, 2014 Exercise 1 [6 points] In the Unimation Puma 560 robot, the DC motor that drives joint 2 is mounted in the body of link 2 upper arm and is connected to the joint
MECH 3140 Final Project
 MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
Positioning Servo Design Example
 Positioning Servo Design Example 1 Goal. The goal in this design example is to design a control system that will be used in a pick-and-place robot to move the link of a robot between two positions. Usually
Positioning Servo Design Example 1 Goal. The goal in this design example is to design a control system that will be used in a pick-and-place robot to move the link of a robot between two positions. Usually
Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints
 Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
A passively safe cable driven upper limb rehabilitation exoskeleton
 Technology and Health Care 23 (2015) S197 S202 DOI 10.3233/THC-150954 IOS Press S197 A passively safe cable driven upper limb rehabilitation exoskeleton Yanyan Chen, Jizhuang Fan, Yanhe Zhu, Jie Zhao and
Technology and Health Care 23 (2015) S197 S202 DOI 10.3233/THC-150954 IOS Press S197 A passively safe cable driven upper limb rehabilitation exoskeleton Yanyan Chen, Jizhuang Fan, Yanhe Zhu, Jie Zhao and
Collision Safety for Physical Human-Robot Collaboration
 Collision Safety for Physical Human-Robot Collaboration IROS 2015 Workshop Physical Human-Robot Collaboration Jae-Bok Song School of Mechanical Engineering Korea University Seoul, Korea Outline 2 Human-Robot
Collision Safety for Physical Human-Robot Collaboration IROS 2015 Workshop Physical Human-Robot Collaboration Jae-Bok Song School of Mechanical Engineering Korea University Seoul, Korea Outline 2 Human-Robot
Introduction to Control (034040) lecture no. 2
 lecture no. 2") Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Toward Torque Control of a KUKA LBR IIWA for Physical Human-Robot Interaction
 Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
 Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Fig.1 Partially compliant eccentric slider crank linkage
 ANALYSIS OF AN UNDERACTUATED COMPLIANT FIVE-BAR LINKAGE Deepak Behera and Dr.J.Srinivas, Department of Mechanical Engineering, NIT-Rourkela 769 008 email: srin07@yahoo.co.in Abstract: This paper presents
ANALYSIS OF AN UNDERACTUATED COMPLIANT FIVE-BAR LINKAGE Deepak Behera and Dr.J.Srinivas, Department of Mechanical Engineering, NIT-Rourkela 769 008 email: srin07@yahoo.co.in Abstract: This paper presents
Contact Distinction in Human-Robot Cooperation with Admittance Control
 Contact Distinction in Human-Robot Cooperation with Admittance Control Alexandros Kouris, Fotios Dimeas and Nikos Aspragathos Robotics Group, Dept. of Mechanical Engineering & Aeronautics University of
Contact Distinction in Human-Robot Cooperation with Admittance Control Alexandros Kouris, Fotios Dimeas and Nikos Aspragathos Robotics Group, Dept. of Mechanical Engineering & Aeronautics University of
Lecture «Robot Dynamics»: Dynamics 2
 Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
DEVELOPMENT OF A BAR-SHAPED ULTRASONIC MOTOR FOR MULTI-DEGREES OF FREEDOM MOTION
 DEVELOPMENT OF A BAR-SHAPED ULTRASONIC MOTOR FOR MULTI-DEGREES OF FREEDOM MOTION Kenjiro Takemura KEIO University, Yokohama, Kanagawa, JAPAN, m982468@msr.st.keio.ac.jp Nobuyuki Kojima Canon Inc., Ohta-ku,
DEVELOPMENT OF A BAR-SHAPED ULTRASONIC MOTOR FOR MULTI-DEGREES OF FREEDOM MOTION Kenjiro Takemura KEIO University, Yokohama, Kanagawa, JAPAN, m982468@msr.st.keio.ac.jp Nobuyuki Kojima Canon Inc., Ohta-ku,
Robots with Elastic Joints: Modeling and Control
 Scuola di Dottorato CIRA Controllo di Sistemi Robotici per la Manipolazione e la Cooperazione Bertinoro (FC), 14 16 Luglio 2003 Robots with Elastic Joints: Modeling and Control Alessandro De Luca Dipartimento
Scuola di Dottorato CIRA Controllo di Sistemi Robotici per la Manipolazione e la Cooperazione Bertinoro (FC), 14 16 Luglio 2003 Robots with Elastic Joints: Modeling and Control Alessandro De Luca Dipartimento
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION
 COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
Acknowledgements. Feedback Control of Bipedal Locomotion RAS Pioneer Award to Mark Spong. Videos and Papers
 Feedback Control of Bipedal Locomotion Acknowledgements Hae Won Park Post Doc MIT Koushil Sreenath Post Doc UPenn University of Michigan Jessy W. Grizzle Jerry W. and Carol L. Levin Professor of Engineering
Feedback Control of Bipedal Locomotion Acknowledgements Hae Won Park Post Doc MIT Koushil Sreenath Post Doc UPenn University of Michigan Jessy W. Grizzle Jerry W. and Carol L. Levin Professor of Engineering
Bi-Articular Muscle Actuation Design for Robot Arms
 Bi-Articular Muscle Actuation Design for Robot Arms V. Salvucci Y. Kimura S. Oh Y. Hori Hori-Fujimoto Lab, The University of Tokyo ICRA 2011 Workshop on Biologically-inspired Actuation, Shanghai Outline
Bi-Articular Muscle Actuation Design for Robot Arms V. Salvucci Y. Kimura S. Oh Y. Hori Hori-Fujimoto Lab, The University of Tokyo ICRA 2011 Workshop on Biologically-inspired Actuation, Shanghai Outline
Seul Jung, T. C. Hsia and R. G. Bonitz y. Robotics Research Laboratory. University of California, Davis. Davis, CA 95616
 On Robust Impedance Force Control of Robot Manipulators Seul Jung, T C Hsia and R G Bonitz y Robotics Research Laboratory Department of Electrical and Computer Engineering University of California, Davis
On Robust Impedance Force Control of Robot Manipulators Seul Jung, T C Hsia and R G Bonitz y Robotics Research Laboratory Department of Electrical and Computer Engineering University of California, Davis
Chapter 5 Torsion STRUCTURAL MECHANICS: CE203. Notes are based on Mechanics of Materials: by R. C. Hibbeler, 7th Edition, Pearson
 STRUCTURAL MECHANICS: CE203 Chapter 5 Torsion Notes are based on Mechanics of Materials: by R. C. Hibbeler, 7th Edition, Pearson Dr B. Achour & Dr Eng. K. El-kashif Civil Engineering Department, University
STRUCTURAL MECHANICS: CE203 Chapter 5 Torsion Notes are based on Mechanics of Materials: by R. C. Hibbeler, 7th Edition, Pearson Dr B. Achour & Dr Eng. K. El-kashif Civil Engineering Department, University
A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT
 A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT Florentina Adascalitei 1, Ioan Doroftei 1, Ovidiu Crivoi 1, Bram Vanderborght, Dirk Lefeber 1 "Gh. Asachi" Technical University
A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT Florentina Adascalitei 1, Ioan Doroftei 1, Ovidiu Crivoi 1, Bram Vanderborght, Dirk Lefeber 1 "Gh. Asachi" Technical University
Overview of motors and motion control
 Overview of motors and motion control. Elements of a motion-control system Power upply High-level controller ow-level controller Driver Motor. Types of motors discussed here; Brushed, PM DC Motors Cheap,
Overview of motors and motion control. Elements of a motion-control system Power upply High-level controller ow-level controller Driver Motor. Types of motors discussed here; Brushed, PM DC Motors Cheap,
Predictive Cascade Control of DC Motor
 Volume 49, Number, 008 89 Predictive Cascade Control of DC Motor Alexandru MORAR Abstract: The paper deals with the predictive cascade control of an electrical drive intended for positioning applications.
Volume 49, Number, 008 89 Predictive Cascade Control of DC Motor Alexandru MORAR Abstract: The paper deals with the predictive cascade control of an electrical drive intended for positioning applications.
WORCESTER POLYTECHNIC INSTITUTE
 WORCESTER POLYTECHNIC INSTITUTE MECHANICAL ENGINEERING DEPARTMENT STRESS ANALYSIS ES-2502, C 2012 Lecture 17: 10 February 2012 General information Instructor: Cosme Furlong HL-151 (508) 831-5126 cfurlong@wpi.edu
WORCESTER POLYTECHNIC INSTITUTE MECHANICAL ENGINEERING DEPARTMENT STRESS ANALYSIS ES-2502, C 2012 Lecture 17: 10 February 2012 General information Instructor: Cosme Furlong HL-151 (508) 831-5126 cfurlong@wpi.edu
Laboratory 11 Control Systems Laboratory ECE3557. State Feedback Controller for Position Control of a Flexible Joint
 Laboratory 11 State Feedback Controller for Position Control of a Flexible Joint 11.1 Objective The objective of this laboratory is to design a full state feedback controller for endpoint position control
Laboratory 11 State Feedback Controller for Position Control of a Flexible Joint 11.1 Objective The objective of this laboratory is to design a full state feedback controller for endpoint position control
PASSIVE CONTROL OF FLUID POWERED HUMAN POWER AMPLIFIERS
 OS9-3 Proceedings of the 7th JFPS International Symposium on Fluid Power, TOYAMA 28 September 5-8, 28 PASSIVE CONTROL OF FLUID POWERED HUMAN POWER AMPLIFIERS Perry Y. Li and Venkat Durbha Center for Compact
OS9-3 Proceedings of the 7th JFPS International Symposium on Fluid Power, TOYAMA 28 September 5-8, 28 PASSIVE CONTROL OF FLUID POWERED HUMAN POWER AMPLIFIERS Perry Y. Li and Venkat Durbha Center for Compact
Dynamics. describe the relationship between the joint actuator torques and the motion of the structure important role for
 Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Dynamics describe the relationship between the joint actuator torques and the motion of the structure important role for simulation of motion (test control strategies) analysis of manipulator structures
Robotics. Dynamics. University of Stuttgart Winter 2018/19
 Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
Decoupling Identification with Closed-loop-controlled Elements for Two-link Arm with Elastic Joints
 Preprints of the 9th International Symposium on Robot Control (SYROCO'9) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-2, 29 Decoupling Identification
Preprints of the 9th International Symposium on Robot Control (SYROCO'9) The International Federation of Automatic Control Nagaragawa Convention Center, Gifu, Japan, September 9-2, 29 Decoupling Identification
EXAMPLE OF PILED FOUNDATIONS
 EXAMPLE OF PILED FOUNDATIONS The example developed below is intended to illustrate the various steps involved in the determination of the seismic forces developed in piles during earthquake shaking. The
EXAMPLE OF PILED FOUNDATIONS The example developed below is intended to illustrate the various steps involved in the determination of the seismic forces developed in piles during earthquake shaking. The
Force Tracking Impedance Control with Variable Target Stiffness
 Proceedings of the 17th World Congress The International Federation of Automatic Control Force Tracking Impedance Control with Variable Target Stiffness K. Lee and M. Buss Institute of Automatic Control
Proceedings of the 17th World Congress The International Federation of Automatic Control Force Tracking Impedance Control with Variable Target Stiffness K. Lee and M. Buss Institute of Automatic Control
Compact Variable Stiffness Joint with Force Sensing Ability-Application to Classify Contact Surfaces
 Compact Variable Stiffness Joint with Force Sensing Ability-Application to Classify Contact Surfaces Shinya Kajikawa and Aruto Suzuki Department of Mechanical Engineering and Intelligent Systems, Tohoku
Compact Variable Stiffness Joint with Force Sensing Ability-Application to Classify Contact Surfaces Shinya Kajikawa and Aruto Suzuki Department of Mechanical Engineering and Intelligent Systems, Tohoku
Q. 1 Q. 5 carry one mark each.
 General ptitude G Set-8 Q. 1 Q. 5 carry one mark each. Q.1 The chairman requested the aggrieved shareholders to him. () bare with () bore with (C) bear with (D) bare Q.2 Identify the correct spelling out
General ptitude G Set-8 Q. 1 Q. 5 carry one mark each. Q.1 The chairman requested the aggrieved shareholders to him. () bare with () bore with (C) bear with (D) bare Q.2 Identify the correct spelling out
READING QUIZ. CEE 271: Applied Mechanics II, Dynamics Lecture 27: Ch.18, Sec.1 5 APPLICATIONS KINETIC ENERGY, WORK, PRINCIPLE OF WORK AND ENERGY
 READING QUIZ CEE 27: Applied Mechanics II, Dynamics Lecture 27: Ch.8, Sec. 5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: Kinetic energy due to rotation
READING QUIZ CEE 27: Applied Mechanics II, Dynamics Lecture 27: Ch.8, Sec. 5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: Kinetic energy due to rotation
Optical Method for Micro Force Measurement. Yusaku FUJII Gunma University
 Optical Method for Micro Force Measurement Yusaku FUJII Gunma University Small Force (1mN to 1N ) It is difficult to generate and evaluate small force, properly. The causes of the Difficulties in measuring
Optical Method for Micro Force Measurement Yusaku FUJII Gunma University Small Force (1mN to 1N ) It is difficult to generate and evaluate small force, properly. The causes of the Difficulties in measuring
Development of Distributed Optical Torque Sensors for Realization of Local Impedance Control of the Robot Arm
 Development of Distributed Optical Torque Sensors for Realization of Local Impedance Control of the Robot Arm Dzmitry Tsetserukou, Riichiro Tadakuma, Hiroyuki Kajimoto and Susumu Tachi Graduate School
Development of Distributed Optical Torque Sensors for Realization of Local Impedance Control of the Robot Arm Dzmitry Tsetserukou, Riichiro Tadakuma, Hiroyuki Kajimoto and Susumu Tachi Graduate School
Design of a Linear Haptic Display Based on Approximate Straight Line Mechanisms
 The 21 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 21, Taipei, Taiwan Design of a Linear Haptic Display Based on Approximate Straight Line Mechanisms M. Joinié-Maurin,
The 21 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 21, Taipei, Taiwan Design of a Linear Haptic Display Based on Approximate Straight Line Mechanisms M. Joinié-Maurin,
Robot Manipulator Control. Hesheng Wang Dept. of Automation
 Robot Manipulator Control Hesheng Wang Dept. of Automation Introduction Industrial robots work based on the teaching/playback scheme Operators teach the task procedure to a robot he robot plays back eecute
Robot Manipulator Control Hesheng Wang Dept. of Automation Introduction Industrial robots work based on the teaching/playback scheme Operators teach the task procedure to a robot he robot plays back eecute
Joint Mechanism with a Multi-directional Stiffness Adjuster
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Joint Mechanism with a Multi-directional Stiffness Adjuster Shinya Kajikawa and Yasuo Yonemoto
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Joint Mechanism with a Multi-directional Stiffness Adjuster Shinya Kajikawa and Yasuo Yonemoto
PROTOTYPE OF ULTRA-LIGHT PLANETARY MANIPULATOR DESIGN, TESTS AND SIMULATIONS
 PROTOTYPE OF ULTRA-LIGHT PLANETARY MANIPULATOR DESIGN, TESTS AND SIMULATIONS J. Grygorczuk (1), B. Kędziora (1), M. Tokarz (1), K. Seweryn (1), M. Banaszkewicz (1), M. Dobrowolski (1), P. Łyszczek (1),
PROTOTYPE OF ULTRA-LIGHT PLANETARY MANIPULATOR DESIGN, TESTS AND SIMULATIONS J. Grygorczuk (1), B. Kędziora (1), M. Tokarz (1), K. Seweryn (1), M. Banaszkewicz (1), M. Dobrowolski (1), P. Łyszczek (1),
Joint Torque Control for Backlash Compensation in Two-Inertia System
 Joint Torque Control for Backlash Compensation in Two-Inertia System Shota Yamada*, Hiroshi Fujimoto** The University of Tokyo 5--5, Kashiwanoha, Kashiwa, Chiba, 227-856 Japan Phone: +8-4-736-3873*, +8-4-736-43**
Joint Torque Control for Backlash Compensation in Two-Inertia System Shota Yamada*, Hiroshi Fujimoto** The University of Tokyo 5--5, Kashiwanoha, Kashiwa, Chiba, 227-856 Japan Phone: +8-4-736-3873*, +8-4-736-43**
Impact. m k. Natural Period of Vibration τ. Static load Gray area Impact load t > 3 τ. Absorbing energy. Carrying loads
 Impact also called shock, sudden or impulsive loading driving a nail with a hammer, automobile collisions. dashpot a) Rapidly moving vehicles crossing a bridge To distinguish: b) Suddenly applied c) Direct
Impact also called shock, sudden or impulsive loading driving a nail with a hammer, automobile collisions. dashpot a) Rapidly moving vehicles crossing a bridge To distinguish: b) Suddenly applied c) Direct
D DAVID PUBLISHING. Design of Torque Balancing Mechanisms. 1. Introduction. Bruno Zappa, Vittorio Lorenzi, Paolo Righettini and Roberto Strada
 Journal of Mechanics Engineering and Automation 7 (207) 32-320 doi: 0.7265/259-5275/207.06.004 D DAVID PUBLISHING Bruno Zappa, Vittorio Lorenzi, Paolo Righettini and Roberto Strada Department of Engineering
Journal of Mechanics Engineering and Automation 7 (207) 32-320 doi: 0.7265/259-5275/207.06.004 D DAVID PUBLISHING Bruno Zappa, Vittorio Lorenzi, Paolo Righettini and Roberto Strada Department of Engineering
EXPERIMENTAL RESEARCH REGARDING TRANSIENT REGIME OF KINEMATIC CHAINS INCLUDING PLANETARY TRANSMISSIONS USED IN INDUSTRIAL ROBOTS
 International Journal of Modern Manufacturing Technologies ISSN 2067 3604, Vol. VIII, No. 1 / 2016 EXPERIMENTAL RESEARCH REGARDING TRANSIENT REGIME OF KINEMATIC CHAINS INCLUDING PLANETARY TRANSMISSIONS
International Journal of Modern Manufacturing Technologies ISSN 2067 3604, Vol. VIII, No. 1 / 2016 EXPERIMENTAL RESEARCH REGARDING TRANSIENT REGIME OF KINEMATIC CHAINS INCLUDING PLANETARY TRANSMISSIONS
Lecture Note 8-1 Hydraulic Systems. System Analysis Spring
 Lecture Note 8-1 Hydraulic Systems 1 Vehicle Model - Brake Model Brake Model Font Wheel Brake Pedal Vacuum Booster Master Cylinder Proportionnig Valve Vacuum Booster Rear Wheel Master Cylinder Proportioning
Lecture Note 8-1 Hydraulic Systems 1 Vehicle Model - Brake Model Brake Model Font Wheel Brake Pedal Vacuum Booster Master Cylinder Proportionnig Valve Vacuum Booster Rear Wheel Master Cylinder Proportioning
Lecture 6 mechanical system modeling equivalent mass gears
 M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
M2794.25 Mechanical System Analysis 기계시스템해석 lecture 6,7,8 Dongjun Lee ( 이동준 ) Department of Mechanical & Aerospace Engineering Seoul National University Dongjun Lee Lecture 6 mechanical system modeling
MCE493/593 and EEC492/592 Prosthesis Design and Control
 MCE493/593 and EEC492/592 Prosthesis Design and Control Control Systems Part 3 Hanz Richter Department of Mechanical Engineering 2014 1 / 25 Electrical Impedance Electrical impedance: generalization of
MCE493/593 and EEC492/592 Prosthesis Design and Control Control Systems Part 3 Hanz Richter Department of Mechanical Engineering 2014 1 / 25 Electrical Impedance Electrical impedance: generalization of
A Backstepping control strategy for constrained tendon driven robotic finger
 A Backstepping control strategy for constrained tendon driven robotic finger Kunal Sanjay Narkhede 1, Aashay Anil Bhise 2, IA Sainul 3, Sankha Deb 4 1,2,4 Department of Mechanical Engineering, 3 Advanced
A Backstepping control strategy for constrained tendon driven robotic finger Kunal Sanjay Narkhede 1, Aashay Anil Bhise 2, IA Sainul 3, Sankha Deb 4 1,2,4 Department of Mechanical Engineering, 3 Advanced
Flexible Space Robotic Manipulator with Passively Switching Free Joint to Drive Joint
 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8,, Anchorage, Alaska, USA Flexible Space Robotic Manipulator with Passively Switching Free Joint to Drive Joint
IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8,, Anchorage, Alaska, USA Flexible Space Robotic Manipulator with Passively Switching Free Joint to Drive Joint
Planar Multi-body Dynamics of a Tracked Vehicle using Imaginary Wheel Model for Tracks
 Defence Science Journal, Vol. 67, No. 4, July 2017, pp. 460-464, DOI : 10.14429/dsj.67.11548 2017, DESIDOC Planar Multi-body Dynamics of a Tracked Vehicle using Imaginary Wheel Model for Tracks Ilango
Defence Science Journal, Vol. 67, No. 4, July 2017, pp. 460-464, DOI : 10.14429/dsj.67.11548 2017, DESIDOC Planar Multi-body Dynamics of a Tracked Vehicle using Imaginary Wheel Model for Tracks Ilango
DISTURBANCE ATTENUATION IN A MAGNETIC LEVITATION SYSTEM WITH ACCELERATION FEEDBACK
 DISTURBANCE ATTENUATION IN A MAGNETIC LEVITATION SYSTEM WITH ACCELERATION FEEDBACK Feng Tian Department of Mechanical Engineering Marquette University Milwaukee, WI 53233 USA Email: feng.tian@mu.edu Kevin
DISTURBANCE ATTENUATION IN A MAGNETIC LEVITATION SYSTEM WITH ACCELERATION FEEDBACK Feng Tian Department of Mechanical Engineering Marquette University Milwaukee, WI 53233 USA Email: feng.tian@mu.edu Kevin
Manufacturing Equipment Control
 QUESTION 1 An electric drive spindle has the following parameters: J m = 2 1 3 kg m 2, R a = 8 Ω, K t =.5 N m/a, K v =.5 V/(rad/s), K a = 2, J s = 4 1 2 kg m 2, and K s =.3. Ignore electrical dynamics
QUESTION 1 An electric drive spindle has the following parameters: J m = 2 1 3 kg m 2, R a = 8 Ω, K t =.5 N m/a, K v =.5 V/(rad/s), K a = 2, J s = 4 1 2 kg m 2, and K s =.3. Ignore electrical dynamics
Statics. Phys101 Lectures 19,20. Key points: The Conditions for static equilibrium Solving statics problems Stress and strain. Ref: 9-1,2,3,4,5.
 Phys101 Lectures 19,20 Statics Key points: The Conditions for static equilibrium Solving statics problems Stress and strain Ref: 9-1,2,3,4,5. Page 1 The Conditions for Static Equilibrium An object in static
Phys101 Lectures 19,20 Statics Key points: The Conditions for static equilibrium Solving statics problems Stress and strain Ref: 9-1,2,3,4,5. Page 1 The Conditions for Static Equilibrium An object in static
Design On-Line Tunable Gain Artificial Nonlinear Controller
 Journal of Computer Engineering 1 (2009) 3-11 Design On-Line Tunable Gain Artificial Nonlinear Controller Farzin Piltan, Nasri Sulaiman, M. H. Marhaban and R. Ramli Department of Electrical and Electronic
Journal of Computer Engineering 1 (2009) 3-11 Design On-Line Tunable Gain Artificial Nonlinear Controller Farzin Piltan, Nasri Sulaiman, M. H. Marhaban and R. Ramli Department of Electrical and Electronic
for Articulated Robot Arms and Its Applications
 141 Proceedings of the International Conference on Information and Automation, December 15-18, 25, Colombo, Sri Lanka. 1 Forcefree Control with Independent Compensation for Articulated Robot Arms and Its
141 Proceedings of the International Conference on Information and Automation, December 15-18, 25, Colombo, Sri Lanka. 1 Forcefree Control with Independent Compensation for Articulated Robot Arms and Its
Contents. Dynamics and control of mechanical systems. Focus on
 Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Standard specifications ZX165UFE02001
 Standard specifications ZXUF000 May, 0 KAWASAKI HAVY INDUSTRIS, LTD. ROBOT DIVISION Materials and specifications are subject to change without notice. Specification : (Arm): (Controller): 00-DA 0-00DA
Standard specifications ZXUF000 May, 0 KAWASAKI HAVY INDUSTRIS, LTD. ROBOT DIVISION Materials and specifications are subject to change without notice. Specification : (Arm): (Controller): 00-DA 0-00DA
Dynamic model of robots:
 Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
Robotics 2 Dynamic model of robots: Analysis, properties, extensions, parametrization, identification, uses Prof. Alessandro De Luca Analysis of inertial couplings! Cartesian robot! Cartesian skew robot!
D : SOLID MECHANICS. Q. 1 Q. 9 carry one mark each. Q.1 Find the force (in kn) in the member BH of the truss shown.
 in the member BH of the truss shown.") D : SOLID MECHANICS Q. 1 Q. 9 carry one mark each. Q.1 Find the force (in kn) in the member BH of the truss shown. Q.2 Consider the forces of magnitude F acting on the sides of the regular hexagon having
D : SOLID MECHANICS Q. 1 Q. 9 carry one mark each. Q.1 Find the force (in kn) in the member BH of the truss shown. Q.2 Consider the forces of magnitude F acting on the sides of the regular hexagon having
Available online at ScienceDirect. Procedia CIRP 36 (2015 ) CIRP 25th Design Conference Innovative Product Creation
 CIRP 25th Design Conference Innovative Product Creation") Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 36 (2015 ) 111 116 CIRP 25th Design Conference Innovative Product Creation Machine stiffness rating: Characterization and evaluation
Available online at www.sciencedirect.com ScienceDirect Procedia CIRP 36 (2015 ) 111 116 CIRP 25th Design Conference Innovative Product Creation Machine stiffness rating: Characterization and evaluation
Finite Element Models for European Testing: Side Impact Barrier to WG13 Pedestrian Impactors to WG17
 4 th European LS-DYNA Users Conference Occupant II / Pedestrian Safety Finite Element Models for European Testing: Side Impact Barrier to WG13 Pedestrian Impactors to WG17 Trevor Dutton, Arup Solihull,
4 th European LS-DYNA Users Conference Occupant II / Pedestrian Safety Finite Element Models for European Testing: Side Impact Barrier to WG13 Pedestrian Impactors to WG17 Trevor Dutton, Arup Solihull,
Positioning Controller for Mechanical Systems with a Mini Harmonic Drive Servo Actuator
 Positioning Controller for Mechanical Systems with a Mini Harmonic Drive Servo Actuator Tegoeh Tjahjowidodo, Farid Al-Bender, Hendrik Van Brussel, and Wim Symens Abstract Harmonic drives (HD) are high-ratio,
Positioning Controller for Mechanical Systems with a Mini Harmonic Drive Servo Actuator Tegoeh Tjahjowidodo, Farid Al-Bender, Hendrik Van Brussel, and Wim Symens Abstract Harmonic drives (HD) are high-ratio,
Motion Control. Laboratory assignment. Case study. Lectures. compliance, backlash and nonlinear friction. control strategies to improve performance
 436-459 Advanced Control and Automation Motion Control Lectures traditional CNC control architecture modelling of components dynamic response of axes effects on contouring performance control strategies
436-459 Advanced Control and Automation Motion Control Lectures traditional CNC control architecture modelling of components dynamic response of axes effects on contouring performance control strategies
2002 Prentice Hall, Inc. Gene F. Franklin, J. David Powell, Abbas Emami-Naeini Feedback Control of Dynamic Systems, 4e
 u Figure 2.1 Cruise-control model x Friction force bx m x u Figure 2.2 Free-body diagram for cruise control S P 278 Figure 2.3 Automobile suspension y m 2 k s b v car x m 1 k w Road surface r Inertial
u Figure 2.1 Cruise-control model x Friction force bx m x u Figure 2.2 Free-body diagram for cruise control S P 278 Figure 2.3 Automobile suspension y m 2 k s b v car x m 1 k w Road surface r Inertial
Selection Calculations For Linear & Rotary Actuators
 H-8 For Electric Linear Slides and Electric Cylinders First determine your series, then select your product. Select the actuator that you will use based on the following flow charts: Selection Procedure
H-8 For Electric Linear Slides and Electric Cylinders First determine your series, then select your product. Select the actuator that you will use based on the following flow charts: Selection Procedure
4.5 Shaft Misallignments and Flexible Couplings
 222 CHAPTER 4. MECHANISMS FOR MOTION TRANSMISSION 4.5 Shaft Misallignments and Flexible Couplings Mechanical systems always involve two or more shafts to transfer motion. There is always a finite accuracy
222 CHAPTER 4. MECHANISMS FOR MOTION TRANSMISSION 4.5 Shaft Misallignments and Flexible Couplings Mechanical systems always involve two or more shafts to transfer motion. There is always a finite accuracy
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik. Robot Dynamics. Dr.-Ing. John Nassour J.
 Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Artificial Intelligence & Neuro Cognitive Systems Fakultät für Informatik Robot Dynamics Dr.-Ing. John Nassour 25.1.218 J.Nassour 1 Introduction Dynamics concerns the motion of bodies Includes Kinematics
Decentralized PD Control for Non-uniform Motion of a Hamiltonian Hybrid System
 International Journal of Automation and Computing 05(2), April 2008, 9-24 DOI: 0.007/s633-008-09-7 Decentralized PD Control for Non-uniform Motion of a Hamiltonian Hybrid System Mingcong Deng, Hongnian
International Journal of Automation and Computing 05(2), April 2008, 9-24 DOI: 0.007/s633-008-09-7 Decentralized PD Control for Non-uniform Motion of a Hamiltonian Hybrid System Mingcong Deng, Hongnian
DESIGN OF AN ARTICULATED ROBOTIC LEG WITH NONLINEAR SERIES ELASTIC ACTUATION
 DESIGN OF AN ARTICULATED ROBOTIC LEG WITH NONLINEAR SERIES ELASTIC ACTUATION MARCO HUTTER, C. DAVID REMY, ROLAND SIEGWART Autonomous Systems Lab, ETH Zurich, CLA E11., Tannenstrasse 3, 809 Zurich, Switzerland,
DESIGN OF AN ARTICULATED ROBOTIC LEG WITH NONLINEAR SERIES ELASTIC ACTUATION MARCO HUTTER, C. DAVID REMY, ROLAND SIEGWART Autonomous Systems Lab, ETH Zurich, CLA E11., Tannenstrasse 3, 809 Zurich, Switzerland,
Dynamic Modeling of Fluid Power Transmissions for Wind Turbines
 Dynamic Modeling of Fluid Power Transmissions for Wind Turbines EWEA OFFSHORE 211 N.F.B. Diepeveen, A. Jarquin Laguna n.f.b.diepeveen@tudelft.nl, a.jarquinlaguna@tudelft.nl Offshore Wind Group, TU Delft,
Dynamic Modeling of Fluid Power Transmissions for Wind Turbines EWEA OFFSHORE 211 N.F.B. Diepeveen, A. Jarquin Laguna n.f.b.diepeveen@tudelft.nl, a.jarquinlaguna@tudelft.nl Offshore Wind Group, TU Delft,
ROBUST FRICTION COMPENSATOR FOR HARMONIC DRIVE TRANSMISSION
 Proceedings of the 1998 IEEE International Conference on Control Applications Trieste, Italy 1-4 September 1998 TAO1 12:lO ROBUST FRICTION COMPENSATOR FOR HARMONIC DRIVE TRANSMISSION H.D. Taghirad K. N.
Proceedings of the 1998 IEEE International Conference on Control Applications Trieste, Italy 1-4 September 1998 TAO1 12:lO ROBUST FRICTION COMPENSATOR FOR HARMONIC DRIVE TRANSMISSION H.D. Taghirad K. N.
Science. Circular Motion. Atomic Structure and Nuclear Chemistry. Kinematics; Motion in One and Two Dimensions
 Inquiry -P-1.1 -P-1.2 -P-1.3 -P-1.4 -P-1.5 -P-1.6 -P-1.7 -P-1.8 -P-1.9 -P-2.1 -P-1.1 -P-2.1 -P-2.2 -P-2.3 Circular Motion Use appropriate safety procedures when conducting investigations. Use appropriate
Inquiry -P-1.1 -P-1.2 -P-1.3 -P-1.4 -P-1.5 -P-1.6 -P-1.7 -P-1.8 -P-1.9 -P-2.1 -P-1.1 -P-2.1 -P-2.2 -P-2.3 Circular Motion Use appropriate safety procedures when conducting investigations. Use appropriate
RV SeRieS S P E C I F I C A T I O N S
 SPECIFICATIONS High-Performance Precision Rotation Stages R V S e R i e S GUARANTEED The RV Series rotation stages provide high-precision angular positioning accuracy combined with high load capacity.
SPECIFICATIONS High-Performance Precision Rotation Stages R V S e R i e S GUARANTEED The RV Series rotation stages provide high-precision angular positioning accuracy combined with high load capacity.
Mechanical Engineering Ph.D. Preliminary Qualifying Examination Solid Mechanics February 25, 2002
 student personal identification (ID) number on each sheet. Do not write your name on any sheet. #1. A homogeneous, isotropic, linear elastic bar has rectangular cross sectional area A, modulus of elasticity
student personal identification (ID) number on each sheet. Do not write your name on any sheet. #1. A homogeneous, isotropic, linear elastic bar has rectangular cross sectional area A, modulus of elasticity
CE 102: Engineering Mechanics. Minimum Potential Energy
 CE 10: Engineering Mechanics Minimum Potential Energy Work of a Force During a Finite Displacement Work of a force corresponding to an infinitesimal displacement, Work of a force corresponding to a finite
CE 10: Engineering Mechanics Minimum Potential Energy Work of a Force During a Finite Displacement Work of a force corresponding to an infinitesimal displacement, Work of a force corresponding to a finite
Natural Frequency Analysis of Spring-Manipulator System for Force Generation Utilizing Mechanical Resonance
 ICCAS5 June -5, KINTEX, yeonggi-do, Korea Natural Frequency Analysis of Spring-Manipulator System for Force eneration Utilizing Mechanical Resonance Jun Kobayashi* and Fujio Ohkawa* * Department of Systems
ICCAS5 June -5, KINTEX, yeonggi-do, Korea Natural Frequency Analysis of Spring-Manipulator System for Force eneration Utilizing Mechanical Resonance Jun Kobayashi* and Fujio Ohkawa* * Department of Systems
Impedance control using a cascaded loop force control
 Impedance control using a cascaded loop force control Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin, Maxime Gautier To cite this version: Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin,
Impedance control using a cascaded loop force control Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin, Maxime Gautier To cite this version: Sylvain Devie, Pierre-Philippe Robet, Yannick Aoustin,
The Reflexxes Motion Libraries. An Introduction to Instantaneous Trajectory Generation
 ICRA Tutorial, May 6, 2013 The Reflexxes Motion Libraries An Introduction to Instantaneous Trajectory Generation Torsten Kroeger 1 Schedule 8:30-10:00 Introduction and basics 10:00-10:30 Coffee break 10:30-11:30
ICRA Tutorial, May 6, 2013 The Reflexxes Motion Libraries An Introduction to Instantaneous Trajectory Generation Torsten Kroeger 1 Schedule 8:30-10:00 Introduction and basics 10:00-10:30 Coffee break 10:30-11:30
Rigid Body Kinetics :: Virtual Work
 Rigid Body Kinetics :: Virtual Work Work-energy relation for an infinitesimal displacement: du = dt + dv (du :: total work done by all active forces) For interconnected systems, differential change in
Rigid Body Kinetics :: Virtual Work Work-energy relation for an infinitesimal displacement: du = dt + dv (du :: total work done by all active forces) For interconnected systems, differential change in