Energy Storage and Renewables in New Jersey: Complementary Technologies for Reducing Our Carbon Footprint
|
|
|
- Helena Harvey
- 6 years ago
- Views:
Transcription
1 Energy Sorage and Renewables in New Jersey: Complemenary Technologies for Reducing Our Carbon Fooprin ACEE E-filliaes workshop November 14, 2014 Warren B. Powell Daniel Seingar Harvey Cheng Greg Davies 2014 Warren B. Powell, Princeon Universiy
2 Frequency regulaion PJM sends charge/discharge signals o generaors every 2 seconds o smooh ou frequency/volage variaions 1 hour MW
3 Solar from PSE&G solar farms Solar from a single solar farm Solar energy from a single solar farm 1 week

4 Energy from wind Wind power from all PJM wind farms 1 year Jan Feb March April May June July Aug Sep Oc Nov Dec
5 Energy from wind Wind from all PJM wind farms 30 days
6 Wind energy in PJM Toal load vs. oal curren wind (January)
7 Winer load and solar Toal PJM load plus facored solar (January)
8 Wind energy in PJM Toal PJM load plus acual wind (July)
9 Summer load and wind Toal PJM load plus acual wind (July)

10 99.9 percen from renewables! Wind & solar Baery sorage Fossil backup }20 GW


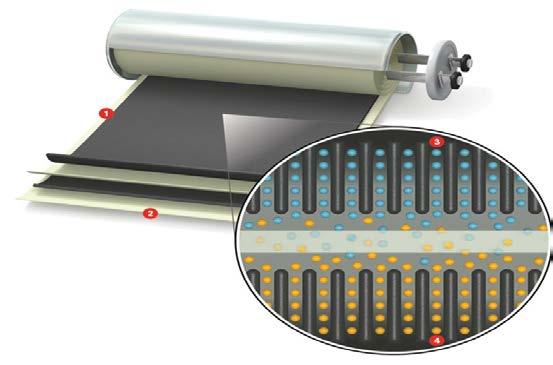
11 Lead-acid or lihium-ion Ulracapacio rs
12 Research challenges How do we conrol a baery sorage sysem? Challenges include:» Managing a single sorage device o handle muliple revenue sreams, over muliple ime scales» Conrolling a sorage sysem in he presence of a mulidimensional sae of he world» Conrolling dozens o hundreds of sorage devices spread around he grid. How do we design sorage sysems?» Wha ype of sorage device(s)?» How many are needed?» How should hey be disribued across he grid? How does sorage change he economics of renewables?
13 Revenue sreams Frequency regulaion Power qualiy managemen Baery arbirage Energy shifing Demand peak managemen - Many uiliies impose charges based on peak usage over a monh, quarer or even a year. Peak managemen for avoiding capaciy expansion Backup power for ouages seconds minues hours days-weeks weeks-monhs monhs-years
14 Research goals To design an algorihm ha produces near-opimal policies ha handle he following problem characerisics:» Responds o predicable ime-dependen srucural paerns over hourly, daily and weekly cycles in generaion and loads.» Able o simulaneously opimize over muliple revenue sreams, balanced agains maximizing he lifeime of he baery.» Able o handle ime scales ranging from seconds o minues, hours and days.» Handles uncerainy in energy generaion, prices and loads.» Handles sae of he world variables such as weaher condiions, nework condiions and prices.» For some applicaions, we need o scale o large numbers (ens o hundreds, bu perhaps housands) of grid-level sorage devices.» Abiliy o incorporae forecass of wind or solar energy, loads, and weaher.» Needs o be compuaionally very fas.

15 A sorage problem Energy sorage wih sochasic prices, supplies and demands. wind E D grid P baery R E = E + Eˆ wind wind wind P = P + Pˆ grid grid grid D = D + Dˆ load load load R = R + x baery baery + 1 W + 1 = Exogenous inpus S = Sae variable x = Conrollable inpus
16 A sorage problem Bellman s opimaliy equaion V( S ) = min C( S, x ) + γ EV( S ( S, x, W ) ( ) x X E P D R wind grid load baery x x x x x wind baery wind load grid baery grid load baery load Eˆ Pˆ Dˆ wind + 1 grid + 1 load + 1
17 Managing a waer reservoir Backward dynamic programming in one dimension Sep 0: Iniialize V ( R ) = 0 for R = 0,1,...,100 T+ 1 T+ 1 T+ 1 Sep 1: Sep backward = TT, 1, T 2,... Sep 2: Loop over R = 0,1,...,100 Sep 3: Loop over all decisions 0 x Sep 4: Take he expecaion over all rainfall levels (also discreized): R 100 max { } W Compue Q( R, x ) = C( R, x ) + V (min R, R x+ w ) P ( w) End sep 4; End Sep 3; * Find V ( R) = max x QR (, x) * + 1 w= 0 π Sore X ( R) = arg max QR (, x). (This is our policy) End Sep 2; End Sep 1; x
18 Managing cash in a muual fund Dynamic programming in muliple dimensions Sep 0: Iniialize V ( ) 0 for all saes. T+ 1 ST+ 1 = Sep 1: Sep backward = TT, 1, T 2,... ( R D p E ) Sep 2: Loop over S =,,, (four loops) Sep 3: Loop over all decisions x (a problem if x is a vecor) M ( Dˆ ˆ ˆ p E) Sep 4: Take he expecaion over each random dimension,, Compue Q( S, x ) = C( S, x ) + End sep 4; End Sep 3; * w = 0 w = 0 w = * Find ( ) = max x (, ) ( ( )) π Sore X ( S) = arg max QS (, x). (This is our policy) End Sep 2; End Sep 1; V S QS x x W V S S, x, W = ( w, w, w ) P ( w, w, w )

19

 x X Invenory held over from previous ime")
20 Approximae dynamic programming Bellman s opimaliy equaion» We approximae he value of energy in sorage: ( x( x γ )) V ( S ) = min C( S, x ) + V S ( S, x ) x X Invenory held over from previous ime period
21 Approximae dynamic programming We updae he piecewise linear value funcions by compuing esimaes of slopes using a backward pass: δ R» The cos along he marginal pah is he derivaive of he simulaion wih respec o he flow perurbaion.
22 Approximae dynamic programming Tesing on a deerminisic problem demonsraes ha we can precisely capure opimal ime-dependen behavior:
23 Approximae dynamic programming 120 Benchmarking agains opimaliy on a sochasic model 100 Percen Percen of opimal opimal Sorage problem
24 Approximae dynamic programming 101 Benchmarking agains opimaliy on a sochasic model 100 Percen Percen of opimal opimal Sorage problem
25 Grid level sorage Slide 25
26 Grid level sorage conrol Slide 26
27 Grid level sorage conrol Monday Time :05 :10 :15 :20 Slide 27
28 Grid level sorage conrol Monday Time :05 :10 :15 :20 Slide 28
29 Grid level sorage conrol Monday Time :05 :10 :15 :20 Slide 29
30 Grid level sorage conrol Approximae dynamic programming (blue) vs. opimal using linear programming (green)

31 Heerogeneous flees of baeries

32 Heerogeneous flees of baeries A ale of wo baeries» Ulracapacior High power, high efficiency, low capaciy» Lead acid Lower power, lower efficiency, high capaciy Lead acid Ulra capacior
 energy is held in sorage")
33 Heerogeneous flees of baeries Conrol algorihm adaps o characerisics of each sorage device Cumulaive disribuion Time (hours) energy is held in sorage device
34 Handling muliple ime scales Daily (hourly incremens) ( γ E ) V( S ) = min C( S, x ) + V( S x X Hourly (5-min. incremens) V( S ) = min ( C( S, x ) + γ EV( S ) x X
35 Handling muliple ime scales Daily (hourly incremens) ( γ E ) V( S ) = min C( S, x ) + V( S x X Hourly (5-min. incremens) ( γ E ) V( S ) = min C( S, x ) + V( S x X
36 Handling muliple ime scales Daily (hourly incremens) ( γ E ) V( S ) = min C( S, x ) + V( S x X Hourly (5-min. incremens) ( γ E ) V( S ) = min C( S, x ) + V( S x X min (2-sec. incremens) V( S ) = min ( C( S, x ) + γ EV( S ) x X There are 43,200 2-second incremens in a day, over 300,000 in a week.



37 Solar energy Princeon solar array Wha is he value of sorage in managing he variabiliy from renewables?


38 Our model, SMART-Sorage simulaneously opimizes he ramping of generaors as well as sorage.
39 Solar-sorage experimens Sorage level Load Solar inensiy LMP Mixed sun/cloud Sunny day Cloudy day Mixed sun/cloud



40 Sunny day Solar = 2.3GW Sorage = 12Gwh/600MW Pumped sorage Gas urbine Seam Nuclear CC Solar = 23GW Sorage = 12Gwh/600-MW Solar Energy from sorage Cloudy day


41 Solar-sorage experimens Load covered by solar % Solar capaciy 23MW 230MW 2.3GW 11.5GW 23GW % of solar used Solar capaciy 23MW 230MW 2.3GW 11.5GW 23GW
42 Solar-sorage experimens Some conclusions:» The model will only pu energy in sorage when sorage is he only way o mee fas variaions in generaion and loads.» The reason is he losses ha are incurred when convering energy is sored. I is always beer o ramp down a generaor during periods of high energy generaion from wind or solar, han o sore he energy and use i beer.» The idea ha he conversion losses do no maer when he energy is free is a myh. I only applies when he oal generaion from renewables exceeds he oal load (which was never he case in our experimens).
43 Research goals To design an algorihm ha produces near-opimal policies ha handle he following problem characerisics:» Responds o predicable ime-dependen srucural paerns over hourly, daily and weekly cycles in generaion and loads.» Able o simulaneously opimize over muliple revenue sreams, balanced agains maximizing he lifeime of he baery.» Able o handle ime scales ranging from seconds o minues, hours and days.» Handles uncerainy in energy generaion, prices and loads.» Handles sae of he world variables such as weaher condiions, nework condiions and prices.» For some applicaions, we need o scale o large numbers (ens o hundreds, bu perhaps housands) of grid-level sorage devices.» Abiliy o incorporae forecass of wind or solar energy, loads, and weaher.» Needs o be compuaionally very fas.
44 Thank you! For more informaion see: hp://energysysems.princeon.edu
Subway stations energy and air quality management
 Subway saions energy and air qualiy managemen wih sochasic opimizaion Trisan Rigau 1,2,4, Advisors: P. Carpenier 3, J.-Ph. Chancelier 2, M. De Lara 2 EFFICACITY 1 CERMICS, ENPC 2 UMA, ENSTA 3 LISIS, IFSTTAR
Subway saions energy and air qualiy managemen wih sochasic opimizaion Trisan Rigau 1,2,4, Advisors: P. Carpenier 3, J.-Ph. Chancelier 2, M. De Lara 2 EFFICACITY 1 CERMICS, ENPC 2 UMA, ENSTA 3 LISIS, IFSTTAR
Notes on Kalman Filtering
 Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Hydropower Economics: An Overview
 ydropower Economics: An Overview Finn R Førsund Professor Emerius Universiy of Oslo * Slides prepared for ECON4925 - Resource Economics Ocober 5 2017 ydropower economics 1 Curriculum ydropower Economics:
ydropower Economics: An Overview Finn R Førsund Professor Emerius Universiy of Oslo * Slides prepared for ECON4925 - Resource Economics Ocober 5 2017 ydropower economics 1 Curriculum ydropower Economics:
Energy Storage Benchmark Problems
 Energy Sorage Benchmark Problems Daniel F. Salas 1,3, Warren B. Powell 2,3 1 Deparmen of Chemical & Biological Engineering 2 Deparmen of Operaions Research & Financial Engineering 3 Princeon Laboraory
Energy Sorage Benchmark Problems Daniel F. Salas 1,3, Warren B. Powell 2,3 1 Deparmen of Chemical & Biological Engineering 2 Deparmen of Operaions Research & Financial Engineering 3 Princeon Laboraory
Augmented Reality II - Kalman Filters - Gudrun Klinker May 25, 2004
 Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Excel-Based Solution Method For The Optimal Policy Of The Hadley And Whittin s Exact Model With Arma Demand
 Excel-Based Soluion Mehod For The Opimal Policy Of The Hadley And Whiin s Exac Model Wih Arma Demand Kal Nami School of Business and Economics Winson Salem Sae Universiy Winson Salem, NC 27110 Phone: (336)750-2338
Excel-Based Soluion Mehod For The Opimal Policy Of The Hadley And Whiin s Exac Model Wih Arma Demand Kal Nami School of Business and Economics Winson Salem Sae Universiy Winson Salem, NC 27110 Phone: (336)750-2338
Tutorial: A Unified Modeling and Algorithmic Framework for Optimization under Uncertainty
 Tuorial: A Unified Modeling and Algorihmic Framework for Opimizaion under Uncerainy Informs Opimizaion Sociey Meeing March 23, 2018 Warren B. Powell Princeon Universiy Deparmen of Operaions Research and
Tuorial: A Unified Modeling and Algorihmic Framework for Opimizaion under Uncerainy Informs Opimizaion Sociey Meeing March 23, 2018 Warren B. Powell Princeon Universiy Deparmen of Operaions Research and
Linear Gaussian State Space Models
 Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Speaker Adaptation Techniques For Continuous Speech Using Medium and Small Adaptation Data Sets. Constantinos Boulis
 Speaker Adapaion Techniques For Coninuous Speech Using Medium and Small Adapaion Daa Ses Consaninos Boulis Ouline of he Presenaion Inroducion o he speaker adapaion problem Maximum Likelihood Sochasic Transformaions
Speaker Adapaion Techniques For Coninuous Speech Using Medium and Small Adapaion Daa Ses Consaninos Boulis Ouline of he Presenaion Inroducion o he speaker adapaion problem Maximum Likelihood Sochasic Transformaions
Space-time Galerkin POD for optimal control of Burgers equation. April 27, 2017 Absolventen Seminar Numerische Mathematik, TU Berlin
 Space-ime Galerkin POD for opimal conrol of Burgers equaion Manuel Baumann Peer Benner Jan Heiland April 27, 207 Absolvenen Seminar Numerische Mahemaik, TU Berlin Ouline. Inroducion 2. Opimal Space Time
Space-ime Galerkin POD for opimal conrol of Burgers equaion Manuel Baumann Peer Benner Jan Heiland April 27, 207 Absolvenen Seminar Numerische Mahemaik, TU Berlin Ouline. Inroducion 2. Opimal Space Time
From Multiarmed Bandits to Stochastic Optimization
 From Muliarmed Bandis o Sochasic Opimizaion Muliarmed Bandis Workshop Roerdam, NL May 24, 2018 Warren B. Powell Princeon Universiy Deparmen of Operaions Research and Financial Engineering 2018 Warren B.
From Muliarmed Bandis o Sochasic Opimizaion Muliarmed Bandis Workshop Roerdam, NL May 24, 2018 Warren B. Powell Princeon Universiy Deparmen of Operaions Research and Financial Engineering 2018 Warren B.
International Journal of Computer Science Trends and Technology (IJCST) Volume 3 Issue 6, Nov-Dec 2015
 Volume 3 Issue 6, Nov-Dec 2015") Inernaional Journal of Compuer Science Trends and Technology (IJCST) Volume Issue 6, Nov-Dec 05 RESEARCH ARTICLE OPEN ACCESS An EPQ Model for Two-Parameer Weibully Deerioraed Iems wih Exponenial Demand
Inernaional Journal of Compuer Science Trends and Technology (IJCST) Volume Issue 6, Nov-Dec 05 RESEARCH ARTICLE OPEN ACCESS An EPQ Model for Two-Parameer Weibully Deerioraed Iems wih Exponenial Demand
Probabilistic Robotics
 Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
A Dynamic Model of Economic Fluctuations
 CHAPTER 15 A Dynamic Model of Economic Flucuaions Modified for ECON 2204 by Bob Murphy 2016 Worh Publishers, all righs reserved IN THIS CHAPTER, OU WILL LEARN: how o incorporae dynamics ino he AD-AS model
CHAPTER 15 A Dynamic Model of Economic Flucuaions Modified for ECON 2204 by Bob Murphy 2016 Worh Publishers, all righs reserved IN THIS CHAPTER, OU WILL LEARN: how o incorporae dynamics ino he AD-AS model
Robust and Learning Control for Complex Systems
 Robus and Learning Conrol for Complex Sysems Peer M. Young Sepember 13, 2007 & Talk Ouline Inroducion Robus Conroller Analysis and Design Theory Experimenal Applicaions Overview MIMO Robus HVAC Conrol
Robus and Learning Conrol for Complex Sysems Peer M. Young Sepember 13, 2007 & Talk Ouline Inroducion Robus Conroller Analysis and Design Theory Experimenal Applicaions Overview MIMO Robus HVAC Conrol
Basic Circuit Elements Professor J R Lucas November 2001
 Basic Circui Elemens - J ucas An elecrical circui is an inerconnecion of circui elemens. These circui elemens can be caegorised ino wo ypes, namely acive and passive elemens. Some Definiions/explanaions
Basic Circui Elemens - J ucas An elecrical circui is an inerconnecion of circui elemens. These circui elemens can be caegorised ino wo ypes, namely acive and passive elemens. Some Definiions/explanaions
An Optimal Dynamic Generation Scheduling for a Wind-Thermal Power System *
 Energy and Power Engineering, 2013, 5, 1016-1021 doi:10.4236/epe.2013.54b194 Published Online July 2013 (hp://www.scirp.org/journal/epe) An Opimal Dynamic Generaion Scheduling for a Wind-Thermal Power
Energy and Power Engineering, 2013, 5, 1016-1021 doi:10.4236/epe.2013.54b194 Published Online July 2013 (hp://www.scirp.org/journal/epe) An Opimal Dynamic Generaion Scheduling for a Wind-Thermal Power
Tutorial: A Unified Framework for Optimization under Uncertainty
 Tuorial: A Unified Framework for Opimizaion under Uncerainy Informs Annual Meeing - Nashville November 13, 2016 Warren B. Powell Princeon Universiy Deparmen of Operaions Research and Financial Engineering
Tuorial: A Unified Framework for Opimizaion under Uncerainy Informs Annual Meeing - Nashville November 13, 2016 Warren B. Powell Princeon Universiy Deparmen of Operaions Research and Financial Engineering
Lecture Notes 3: Quantitative Analysis in DSGE Models: New Keynesian Model
 Lecure Noes 3: Quaniaive Analysis in DSGE Models: New Keynesian Model Zhiwei Xu, Email: xuzhiwei@sju.edu.cn The moneary policy plays lile role in he basic moneary model wihou price sickiness. We now urn
Lecure Noes 3: Quaniaive Analysis in DSGE Models: New Keynesian Model Zhiwei Xu, Email: xuzhiwei@sju.edu.cn The moneary policy plays lile role in he basic moneary model wihou price sickiness. We now urn
CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK
 175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
175 CHAPTER 10 VALIDATION OF TEST WITH ARTIFICAL NEURAL NETWORK 10.1 INTRODUCTION Amongs he research work performed, he bes resuls of experimenal work are validaed wih Arificial Neural Nework. From he
Simulation-Solving Dynamic Models ABE 5646 Week 2, Spring 2010
 Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Introduction to Mobile Robotics
 Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
1. Consider a pure-exchange economy with stochastic endowments. The state of the economy
 Answer 4 of he following 5 quesions. 1. Consider a pure-exchange economy wih sochasic endowmens. The sae of he economy in period, 0,1,..., is he hisory of evens s ( s0, s1,..., s ). The iniial sae is given.
Answer 4 of he following 5 quesions. 1. Consider a pure-exchange economy wih sochasic endowmens. The sae of he economy in period, 0,1,..., is he hisory of evens s ( s0, s1,..., s ). The iniial sae is given.
Announcements. Recap: Filtering. Recap: Reasoning Over Time. Example: State Representations for Robot Localization. Particle Filtering
 Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
An introduction to the theory of SDDP algorithm
 An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
Resource Allocation in Visible Light Communication Networks NOMA vs. OFDMA Transmission Techniques
 Resource Allocaion in Visible Ligh Communicaion Neworks NOMA vs. OFDMA Transmission Techniques Eirini Eleni Tsiropoulou, Iakovos Gialagkolidis, Panagiois Vamvakas, and Symeon Papavassiliou Insiue of Communicaions
Resource Allocaion in Visible Ligh Communicaion Neworks NOMA vs. OFDMA Transmission Techniques Eirini Eleni Tsiropoulou, Iakovos Gialagkolidis, Panagiois Vamvakas, and Symeon Papavassiliou Insiue of Communicaions
Georey E. Hinton. University oftoronto. Technical Report CRG-TR February 22, Abstract
 Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Anti-Disturbance Control for Multiple Disturbances
 Workshop a 3 ACC Ani-Disurbance Conrol for Muliple Disurbances Lei Guo (lguo@buaa.edu.cn) Naional Key Laboraory on Science and Technology on Aircraf Conrol, Beihang Universiy, Beijing, 9, P.R. China. Presened
Workshop a 3 ACC Ani-Disurbance Conrol for Muliple Disurbances Lei Guo (lguo@buaa.edu.cn) Naional Key Laboraory on Science and Technology on Aircraf Conrol, Beihang Universiy, Beijing, 9, P.R. China. Presened
Lecture -14: Chopper fed DC Drives
 Lecure -14: Chopper fed DC Drives Chopper fed DC drives o A chopper is a saic device ha convers fixed DC inpu volage o a variable dc oupu volage direcly o A chopper is a high speed on/off semiconducor
Lecure -14: Chopper fed DC Drives Chopper fed DC drives o A chopper is a saic device ha convers fixed DC inpu volage o a variable dc oupu volage direcly o A chopper is a high speed on/off semiconducor
RL Lecture 7: Eligibility Traces. R. S. Sutton and A. G. Barto: Reinforcement Learning: An Introduction 1
 RL Lecure 7: Eligibiliy Traces R. S. Suon and A. G. Baro: Reinforcemen Learning: An Inroducion 1 N-sep TD Predicion Idea: Look farher ino he fuure when you do TD backup (1, 2, 3,, n seps) R. S. Suon and
RL Lecure 7: Eligibiliy Traces R. S. Suon and A. G. Baro: Reinforcemen Learning: An Inroducion 1 N-sep TD Predicion Idea: Look farher ino he fuure when you do TD backup (1, 2, 3,, n seps) R. S. Suon and
Ordinary Differential Equations
 Lecure 22 Ordinary Differenial Equaions Course Coordinaor: Dr. Suresh A. Karha, Associae Professor, Deparmen of Civil Engineering, IIT Guwahai. In naure, mos of he phenomena ha can be mahemaically described
Lecure 22 Ordinary Differenial Equaions Course Coordinaor: Dr. Suresh A. Karha, Associae Professor, Deparmen of Civil Engineering, IIT Guwahai. In naure, mos of he phenomena ha can be mahemaically described
RC, RL and RLC circuits
 Name Dae Time o Complee h m Parner Course/ Secion / Grade RC, RL and RLC circuis Inroducion In his experimen we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors.
Name Dae Time o Complee h m Parner Course/ Secion / Grade RC, RL and RLC circuis Inroducion In his experimen we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors.
Mechanical Fatigue and Load-Induced Aging of Loudspeaker Suspension. Wolfgang Klippel,
 Mechanical Faigue and Load-Induced Aging of Loudspeaker Suspension Wolfgang Klippel, Insiue of Acousics and Speech Communicaion Dresden Universiy of Technology presened a he ALMA Symposium 2012, Las Vegas
Mechanical Faigue and Load-Induced Aging of Loudspeaker Suspension Wolfgang Klippel, Insiue of Acousics and Speech Communicaion Dresden Universiy of Technology presened a he ALMA Symposium 2012, Las Vegas
A variational radial basis function approximation for diffusion processes.
 A variaional radial basis funcion approximaion for diffusion processes. Michail D. Vreas, Dan Cornford and Yuan Shen {vreasm, d.cornford, y.shen}@ason.ac.uk Ason Universiy, Birmingham, UK hp://www.ncrg.ason.ac.uk
A variaional radial basis funcion approximaion for diffusion processes. Michail D. Vreas, Dan Cornford and Yuan Shen {vreasm, d.cornford, y.shen}@ason.ac.uk Ason Universiy, Birmingham, UK hp://www.ncrg.ason.ac.uk
T L. t=1. Proof of Lemma 1. Using the marginal cost accounting in Equation(4) and standard arguments. t )+Π RB. t )+K 1(Q RB
 and standard arguments. t )+Π RB. t )+K 1(Q RB") Elecronic Companion EC.1. Proofs of Technical Lemmas and Theorems LEMMA 1. Le C(RB) be he oal cos incurred by he RB policy. Then we have, T L E[C(RB)] 3 E[Z RB ]. (EC.1) Proof of Lemma 1. Using he marginal
Elecronic Companion EC.1. Proofs of Technical Lemmas and Theorems LEMMA 1. Le C(RB) be he oal cos incurred by he RB policy. Then we have, T L E[C(RB)] 3 E[Z RB ]. (EC.1) Proof of Lemma 1. Using he marginal
WATER ABSTRACTUION AND RESERVOIR VOLUME DESIGN
 WATER ABSTRACTUION AND RESERVOIR VOLUME DESIGN SURFACE WATER Wihou river regulaion Wih river regulaion Coninuous Lakes (regulaed) Selecive Reservoirs CONTINUOUS DERIVATION FROM A RIVER HYDROGRAPH Q FLOW
WATER ABSTRACTUION AND RESERVOIR VOLUME DESIGN SURFACE WATER Wihou river regulaion Wih river regulaion Coninuous Lakes (regulaed) Selecive Reservoirs CONTINUOUS DERIVATION FROM A RIVER HYDROGRAPH Q FLOW
Physical Limitations of Logic Gates Week 10a
 Physical Limiaions of Logic Gaes Week 10a In a compuer we ll have circuis of logic gaes o perform specific funcions Compuer Daapah: Boolean algebraic funcions using binary variables Symbolic represenaion
Physical Limiaions of Logic Gaes Week 10a In a compuer we ll have circuis of logic gaes o perform specific funcions Compuer Daapah: Boolean algebraic funcions using binary variables Symbolic represenaion
Modeling Economic Time Series with Stochastic Linear Difference Equations
 A. Thiemer, SLDG.mcd, 6..6 FH-Kiel Universiy of Applied Sciences Prof. Dr. Andreas Thiemer e-mail: andreas.hiemer@fh-kiel.de Modeling Economic Time Series wih Sochasic Linear Difference Equaions Summary:
A. Thiemer, SLDG.mcd, 6..6 FH-Kiel Universiy of Applied Sciences Prof. Dr. Andreas Thiemer e-mail: andreas.hiemer@fh-kiel.de Modeling Economic Time Series wih Sochasic Linear Difference Equaions Summary:
Article from. Predictive Analytics and Futurism. July 2016 Issue 13
 Aricle from Predicive Analyics and Fuurism July 6 Issue An Inroducion o Incremenal Learning By Qiang Wu and Dave Snell Machine learning provides useful ools for predicive analyics The ypical machine learning
Aricle from Predicive Analyics and Fuurism July 6 Issue An Inroducion o Incremenal Learning By Qiang Wu and Dave Snell Machine learning provides useful ools for predicive analyics The ypical machine learning
ADVANCED MATHEMATICS FOR ECONOMICS /2013 Sheet 3: Di erential equations
 ADVANCED MATHEMATICS FOR ECONOMICS - /3 Shee 3: Di erenial equaions Check ha x() =± p ln(c( + )), where C is a posiive consan, is soluion of he ODE x () = Solve he following di erenial equaions: (a) x
ADVANCED MATHEMATICS FOR ECONOMICS - /3 Shee 3: Di erenial equaions Check ha x() =± p ln(c( + )), where C is a posiive consan, is soluion of he ODE x () = Solve he following di erenial equaions: (a) x
Diebold, Chapter 7. Francis X. Diebold, Elements of Forecasting, 4th Edition (Mason, Ohio: Cengage Learning, 2006). Chapter 7. Characterizing Cycles
. Chapter 7. Characterizing Cycles") Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
Diebold, Chaper 7 Francis X. Diebold, Elemens of Forecasing, 4h Ediion (Mason, Ohio: Cengage Learning, 006). Chaper 7. Characerizing Cycles Afer compleing his reading you should be able o: Define covariance
Planning in POMDPs. Dominik Schoenberger Abstract
 Planning in POMDPs Dominik Schoenberger d.schoenberger@sud.u-darmsad.de Absrac This documen briefly explains wha a Parially Observable Markov Decision Process is. Furhermore i inroduces he differen approaches
Planning in POMDPs Dominik Schoenberger d.schoenberger@sud.u-darmsad.de Absrac This documen briefly explains wha a Parially Observable Markov Decision Process is. Furhermore i inroduces he differen approaches
Voltage/current relationship Stored Energy. RL / RC circuits Steady State / Transient response Natural / Step response
 Review Capaciors/Inducors Volage/curren relaionship Sored Energy s Order Circuis RL / RC circuis Seady Sae / Transien response Naural / Sep response EE4 Summer 5: Lecure 5 Insrucor: Ocavian Florescu Lecure
Review Capaciors/Inducors Volage/curren relaionship Sored Energy s Order Circuis RL / RC circuis Seady Sae / Transien response Naural / Sep response EE4 Summer 5: Lecure 5 Insrucor: Ocavian Florescu Lecure
An recursive analytical technique to estimate time dependent physical parameters in the presence of noise processes
 WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
Modeling the Evolution of Demand Forecasts with Application to Safety Stock Analysis in Production/Distribution Systems
 Modeling he Evoluion of Demand oreca wih Applicaion o Safey Sock Analyi in Producion/Diribuion Syem David Heah and Peer Jackon Preened by Kai Jiang Thi ummary preenaion baed on: Heah, D.C., and P.L. Jackon.
Modeling he Evoluion of Demand oreca wih Applicaion o Safey Sock Analyi in Producion/Diribuion Syem David Heah and Peer Jackon Preened by Kai Jiang Thi ummary preenaion baed on: Heah, D.C., and P.L. Jackon.
Applying Genetic Algorithms for Inventory Lot-Sizing Problem with Supplier Selection under Storage Capacity Constraints
 IJCSI Inernaional Journal of Compuer Science Issues, Vol 9, Issue 1, No 1, January 2012 wwwijcsiorg 18 Applying Geneic Algorihms for Invenory Lo-Sizing Problem wih Supplier Selecion under Sorage Capaciy
IJCSI Inernaional Journal of Compuer Science Issues, Vol 9, Issue 1, No 1, January 2012 wwwijcsiorg 18 Applying Geneic Algorihms for Invenory Lo-Sizing Problem wih Supplier Selecion under Sorage Capaciy
An Inventory Model for Time Dependent Weibull Deterioration with Partial Backlogging
 American Journal of Operaional Research 0, (): -5 OI: 0.593/j.ajor.000.0 An Invenory Model for Time ependen Weibull eerioraion wih Parial Backlogging Umakana Mishra,, Chaianya Kumar Tripahy eparmen of
American Journal of Operaional Research 0, (): -5 OI: 0.593/j.ajor.000.0 An Invenory Model for Time ependen Weibull eerioraion wih Parial Backlogging Umakana Mishra,, Chaianya Kumar Tripahy eparmen of
SUPPLEMENTARY INFORMATION
 SUPPLEMENTARY INFORMATION DOI: 0.038/NCLIMATE893 Temporal resoluion and DICE * Supplemenal Informaion Alex L. Maren and Sephen C. Newbold Naional Cener for Environmenal Economics, US Environmenal Proecion
SUPPLEMENTARY INFORMATION DOI: 0.038/NCLIMATE893 Temporal resoluion and DICE * Supplemenal Informaion Alex L. Maren and Sephen C. Newbold Naional Cener for Environmenal Economics, US Environmenal Proecion
Two Popular Bayesian Estimators: Particle and Kalman Filters. McGill COMP 765 Sept 14 th, 2017
 Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Classical Conditioning IV: TD learning in the brain
 Classical Condiioning IV: TD learning in he brain PSY/NEU338: Animal learning and decision making: Psychological, compuaional and neural perspecives recap: Marr s levels of analysis David Marr (1945-1980)
Classical Condiioning IV: TD learning in he brain PSY/NEU338: Animal learning and decision making: Psychological, compuaional and neural perspecives recap: Marr s levels of analysis David Marr (1945-1980)
Lecture 20: Riccati Equations and Least Squares Feedback Control
 34-5 LINEAR SYSTEMS Lecure : Riccai Equaions and Leas Squares Feedback Conrol 5.6.4 Sae Feedback via Riccai Equaions A recursive approach in generaing he marix-valued funcion W ( ) equaion for i for he
34-5 LINEAR SYSTEMS Lecure : Riccai Equaions and Leas Squares Feedback Conrol 5.6.4 Sae Feedback via Riccai Equaions A recursive approach in generaing he marix-valued funcion W ( ) equaion for i for he
Hidden Markov Models
 Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
3.1.3 INTRODUCTION TO DYNAMIC OPTIMIZATION: DISCRETE TIME PROBLEMS. A. The Hamiltonian and First-Order Conditions in a Finite Time Horizon
 3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
3..3 INRODUCION O DYNAMIC OPIMIZAION: DISCREE IME PROBLEMS A. he Hamilonian and Firs-Order Condiions in a Finie ime Horizon Define a new funcion, he Hamilonian funcion, H. H he change in he oal value of
Robust Learning Control with Application to HVAC Systems
 Robus Learning Conrol wih Applicaion o HVAC Sysems Naional Science Foundaion & Projec Invesigaors: Dr. Charles Anderson, CS Dr. Douglas Hile, ME Dr. Peer Young, ECE Mechanical Engineering Compuer Science
Robus Learning Conrol wih Applicaion o HVAC Sysems Naional Science Foundaion & Projec Invesigaors: Dr. Charles Anderson, CS Dr. Douglas Hile, ME Dr. Peer Young, ECE Mechanical Engineering Compuer Science
An Analysis of Actor/Critic Algorithms using Eligibility Traces: Reinforcement Learning with Imperfect Value Functions
 An Analysis of Acor/Criic Algorihms using Eligibiliy Traces: Reinforcemen Learning wih Imperfec Value Funcions Hajime Kimura 3 Tokyo Insiue of Technology gen@fe.dis.iech.ac.jp Shigenobu Kobayashi Tokyo
An Analysis of Acor/Criic Algorihms using Eligibiliy Traces: Reinforcemen Learning wih Imperfec Value Funcions Hajime Kimura 3 Tokyo Insiue of Technology gen@fe.dis.iech.ac.jp Shigenobu Kobayashi Tokyo
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Financial Econometrics Kalman Filter: some applications to Finance University of Evry - Master 2
 Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
Simulating models with heterogeneous agents
 Simulaing models wih heerogeneous agens Wouer J. Den Haan London School of Economics c by Wouer J. Den Haan Individual agen Subjec o employmen shocks (ε i, {0, 1}) Incomplee markes only way o save is hrough
Simulaing models wih heerogeneous agens Wouer J. Den Haan London School of Economics c by Wouer J. Den Haan Individual agen Subjec o employmen shocks (ε i, {0, 1}) Incomplee markes only way o save is hrough
Machine Learning 4771
 ony Jebara, Columbia Universiy achine Learning 4771 Insrucor: ony Jebara ony Jebara, Columbia Universiy opic 20 Hs wih Evidence H Collec H Evaluae H Disribue H Decode H Parameer Learning via JA & E ony
ony Jebara, Columbia Universiy achine Learning 4771 Insrucor: ony Jebara ony Jebara, Columbia Universiy opic 20 Hs wih Evidence H Collec H Evaluae H Disribue H Decode H Parameer Learning via JA & E ony
Solutions Problem Set 3 Macro II (14.452)
") Soluions Problem Se 3 Macro II (14.452) Francisco A. Gallego 04/27/2005 1 Q heory of invesmen in coninuous ime and no uncerainy Consider he in nie horizon model of a rm facing adjusmen coss o invesmen.
Soluions Problem Se 3 Macro II (14.452) Francisco A. Gallego 04/27/2005 1 Q heory of invesmen in coninuous ime and no uncerainy Consider he in nie horizon model of a rm facing adjusmen coss o invesmen.
Time series Decomposition method
 Time series Decomposiion mehod A ime series is described using a mulifacor model such as = f (rend, cyclical, seasonal, error) = f (T, C, S, e) Long- Iner-mediaed Seasonal Irregular erm erm effec, effec,
Time series Decomposiion mehod A ime series is described using a mulifacor model such as = f (rend, cyclical, seasonal, error) = f (T, C, S, e) Long- Iner-mediaed Seasonal Irregular erm erm effec, effec,
Tom Heskes and Onno Zoeter. Presented by Mark Buller
 Tom Heskes and Onno Zoeer Presened by Mark Buller Dynamic Bayesian Neworks Direced graphical models of sochasic processes Represen hidden and observed variables wih differen dependencies Generalize Hidden
Tom Heskes and Onno Zoeer Presened by Mark Buller Dynamic Bayesian Neworks Direced graphical models of sochasic processes Represen hidden and observed variables wih differen dependencies Generalize Hidden
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
C. Theoretical channels 1. Conditions for complete neutrality Suppose preferences are E t. Monetary policy at the zero lower bound: Theory 11/22/2017
 //7 Moneary policy a he zero lower bound: Theory A. Theoreical channels. Condiions for complee neuraliy (Eggersson and Woodford, ). Marke fricions. Preferred habia and risk-bearing (Hamilon and Wu, ) B.
//7 Moneary policy a he zero lower bound: Theory A. Theoreical channels. Condiions for complee neuraliy (Eggersson and Woodford, ). Marke fricions. Preferred habia and risk-bearing (Hamilon and Wu, ) B.
Presentation Overview
 Acion Refinemen in Reinforcemen Learning by Probabiliy Smoohing By Thomas G. Dieerich & Didac Busques Speaer: Kai Xu Presenaion Overview Bacground The Probabiliy Smoohing Mehod Experimenal Sudy of Acion
Acion Refinemen in Reinforcemen Learning by Probabiliy Smoohing By Thomas G. Dieerich & Didac Busques Speaer: Kai Xu Presenaion Overview Bacground The Probabiliy Smoohing Mehod Experimenal Sudy of Acion
Distributed Dynamic State Estimator: Extension to Distribution Feeders
 Disribued Dynamic Sae Esimaor: Exension o Disribuion Feeders Sakis Meliopoulos Georgia Power Disinguished Professor School of Elecrical and Compuer Engineering Georgia Insiue of Technology Alana, Georgia
Disribued Dynamic Sae Esimaor: Exension o Disribuion Feeders Sakis Meliopoulos Georgia Power Disinguished Professor School of Elecrical and Compuer Engineering Georgia Insiue of Technology Alana, Georgia
Lab 10: RC, RL, and RLC Circuits
 Lab 10: RC, RL, and RLC Circuis In his experimen, we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors. We will sudy he way volages and currens change in
Lab 10: RC, RL, and RLC Circuis In his experimen, we will invesigae he behavior of circuis conaining combinaions of resisors, capaciors, and inducors. We will sudy he way volages and currens change in
Homework 6 AERE331 Spring 2019 Due 4/24(W) Name Sec. 1 / 2
 Name Sec. 1 / 2") Homework 6 AERE33 Spring 9 Due 4/4(W) Name Sec / PROBLEM (5p In PROBLEM 4 of HW4 we used he frequency domain o design a yaw/rudder feedback conrol sysem for a plan wih ransfer funcion 46 Gp () s The conroller
Homework 6 AERE33 Spring 9 Due 4/4(W) Name Sec / PROBLEM (5p In PROBLEM 4 of HW4 we used he frequency domain o design a yaw/rudder feedback conrol sysem for a plan wih ransfer funcion 46 Gp () s The conroller
Bidding in sequential electricity markets: The Nordic case
 Bidding in sequenial elecriciy markes: The Nordic case Trine Krogh Boomsma Deparmen of Mahemaical Sciences, Universiy of Copenhagen Join work wih Sein-Erik Fleen and Nina Juul Par of he ENSYMORA projec
Bidding in sequenial elecriciy markes: The Nordic case Trine Krogh Boomsma Deparmen of Mahemaical Sciences, Universiy of Copenhagen Join work wih Sein-Erik Fleen and Nina Juul Par of he ENSYMORA projec
Lecture 3: Exponential Smoothing
 NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
NATCOR: Forecasing & Predicive Analyics Lecure 3: Exponenial Smoohing John Boylan Lancaser Cenre for Forecasing Deparmen of Managemen Science Mehods and Models Forecasing Mehod A (numerical) procedure
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Scheduling of Crude Oil Movements at Refinery Front-end
 Scheduling of Crude Oil Movemens a Refinery Fron-end Ramkumar Karuppiah and Ignacio Grossmann Carnegie Mellon Universiy ExxonMobil Case Sudy: Dr. Kevin Furman Enerprise-wide Opimizaion Projec March 15,
Scheduling of Crude Oil Movemens a Refinery Fron-end Ramkumar Karuppiah and Ignacio Grossmann Carnegie Mellon Universiy ExxonMobil Case Sudy: Dr. Kevin Furman Enerprise-wide Opimizaion Projec March 15,
INDEX. Transient analysis 1 Initial Conditions 1
 INDEX Secion Page Transien analysis 1 Iniial Condiions 1 Please inform me of your opinion of he relaive emphasis of he review maerial by simply making commens on his page and sending i o me a: Frank Mera
INDEX Secion Page Transien analysis 1 Iniial Condiions 1 Please inform me of your opinion of he relaive emphasis of he review maerial by simply making commens on his page and sending i o me a: Frank Mera
Single-loop System Reliability-based Topology Optimization Accounting for Statistical Dependence between Limit-states
 11 h US Naional Congress on Compuaional Mechanics Minneapolis, Minnesoa Single-loop Sysem Reliabiliy-based Topology Opimizaion Accouning for Saisical Dependence beween imi-saes Tam Nguyen, Norheasern Universiy
11 h US Naional Congress on Compuaional Mechanics Minneapolis, Minnesoa Single-loop Sysem Reliabiliy-based Topology Opimizaion Accouning for Saisical Dependence beween imi-saes Tam Nguyen, Norheasern Universiy
Introduction D P. r = constant discount rate, g = Gordon Model (1962): constant dividend growth rate.
: constant dividend growth rate.") Inroducion Gordon Model (1962): D P = r g r = consan discoun rae, g = consan dividend growh rae. If raional expecaions of fuure discoun raes and dividend growh vary over ime, so should he D/P raio. Since
Inroducion Gordon Model (1962): D P = r g r = consan discoun rae, g = consan dividend growh rae. If raional expecaions of fuure discoun raes and dividend growh vary over ime, so should he D/P raio. Since
Economics 6130 Cornell University Fall 2016 Macroeconomics, I - Part 2
 Economics 6130 Cornell Universiy Fall 016 Macroeconomics, I - Par Problem Se # Soluions 1 Overlapping Generaions Consider he following OLG economy: -period lives. 1 commodiy per period, l = 1. Saionary
Economics 6130 Cornell Universiy Fall 016 Macroeconomics, I - Par Problem Se # Soluions 1 Overlapping Generaions Consider he following OLG economy: -period lives. 1 commodiy per period, l = 1. Saionary
Ensamble methods: Bagging and Boosting
 Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
Lecure 21 Ensamble mehods: Bagging and Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Ensemble mehods Mixure of expers Muliple base models (classifiers, regressors), each covers a differen par
Modal identification of structures from roving input data by means of maximum likelihood estimation of the state space model
 Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Chapter 5 Digital PID control algorithm. Hesheng Wang Department of Automation,SJTU 2016,03
 Chaper 5 Digial PID conrol algorihm Hesheng Wang Deparmen of Auomaion,SJTU 216,3 Ouline Absrac Quasi-coninuous PID conrol algorihm Improvemen of sandard PID algorihm Choosing parameer of PID regulaor Brief
Chaper 5 Digial PID conrol algorihm Hesheng Wang Deparmen of Auomaion,SJTU 216,3 Ouline Absrac Quasi-coninuous PID conrol algorihm Improvemen of sandard PID algorihm Choosing parameer of PID regulaor Brief
13.3 Term structure models
 13.3 Term srucure models 13.3.1 Expecaions hypohesis model - Simples "model" a) shor rae b) expecaions o ge oher prices Resul: y () = 1 h +1 δ = φ( δ)+ε +1 f () = E (y +1) (1) =δ + φ( δ) f (3) = E (y +)
13.3 Term srucure models 13.3.1 Expecaions hypohesis model - Simples "model" a) shor rae b) expecaions o ge oher prices Resul: y () = 1 h +1 δ = φ( δ)+ε +1 f () = E (y +1) (1) =δ + φ( δ) f (3) = E (y +)
STATE-SPACE MODELLING. A mass balance across the tank gives:
 B. Lennox and N.F. Thornhill, 9, Sae Space Modelling, IChemE Process Managemen and Conrol Subjec Group Newsleer STE-SPACE MODELLING Inroducion: Over he pas decade or so here has been an ever increasing
B. Lennox and N.F. Thornhill, 9, Sae Space Modelling, IChemE Process Managemen and Conrol Subjec Group Newsleer STE-SPACE MODELLING Inroducion: Over he pas decade or so here has been an ever increasing
Product differentiation
 differeniaion Horizonal differeniaion Deparmen of Economics, Universiy of Oslo ECON480 Spring 010 Las modified: 010.0.16 The exen of he marke Differen producs or differeniaed varians of he same produc
differeniaion Horizonal differeniaion Deparmen of Economics, Universiy of Oslo ECON480 Spring 010 Las modified: 010.0.16 The exen of he marke Differen producs or differeniaed varians of he same produc
BOKDSGE: A DSGE Model for the Korean Economy
 BOKDSGE: A DSGE Model for he Korean Economy June 4, 2008 Joong Shik Lee, Head Macroeconomeric Model Secion Research Deparmen The Bank of Korea Ouline 1. Background 2. Model srucure & parameer values 3.
BOKDSGE: A DSGE Model for he Korean Economy June 4, 2008 Joong Shik Lee, Head Macroeconomeric Model Secion Research Deparmen The Bank of Korea Ouline 1. Background 2. Model srucure & parameer values 3.
Sensitivity Analysis of a Dynamic Fleet Management Model Using Approximate Dynamic Programming
 OPERATIONS RESEARCH Vol. 55, No. 2, March April 2007, pp. 319 331 issn 0030-364X eissn 1526-5463 07 5502 0319 informs doi 10.1287/opre.1060.0347 2007 INFORMS Sensiiviy Analysis of a Dynamic Flee Managemen
OPERATIONS RESEARCH Vol. 55, No. 2, March April 2007, pp. 319 331 issn 0030-364X eissn 1526-5463 07 5502 0319 informs doi 10.1287/opre.1060.0347 2007 INFORMS Sensiiviy Analysis of a Dynamic Flee Managemen
Dimitri Solomatine. D.P. Solomatine. Data-driven modelling (part 2). 2
. 2") Daa-driven modelling. Par. Daa-driven Arificial di Neural modelling. Newors Par Dimiri Solomaine Arificial neural newors D.P. Solomaine. Daa-driven modelling par. 1 Arificial neural newors ANN: main pes
Daa-driven modelling. Par. Daa-driven Arificial di Neural modelling. Newors Par Dimiri Solomaine Arificial neural newors D.P. Solomaine. Daa-driven modelling par. 1 Arificial neural newors ANN: main pes
CSE 3802 / ECE Numerical Methods in Scientific Computation. Jinbo Bi. Department of Computer Science & Engineering
 CSE 3802 / ECE 3431 Numerical Mehods in Scienific Compuaion Jinbo Bi Deparmen of Compuer Science & Engineering hp://www.engr.uconn.edu/~jinbo 1 Ph.D in Mahemaics The Insrucor Previous professional experience:
CSE 3802 / ECE 3431 Numerical Mehods in Scienific Compuaion Jinbo Bi Deparmen of Compuer Science & Engineering hp://www.engr.uconn.edu/~jinbo 1 Ph.D in Mahemaics The Insrucor Previous professional experience:
Ensamble methods: Boosting
 Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room
Lecure 21 Ensamble mehods: Boosing Milos Hauskrech milos@cs.pi.edu 5329 Senno Square Schedule Final exam: April 18: 1:00-2:15pm, in-class Term projecs April 23 & April 25: a 1:00-2:30pm in CS seminar room
EKF SLAM vs. FastSLAM A Comparison
 vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
( ) = Q 0. ( ) R = R dq. ( t) = I t
 = Q 0. ( ) R = R dq. ( t) = I t") ircuis onceps The addiion of a simple capacior o a circui of resisors allows wo relaed phenomena o occur The observaion ha he ime-dependence of a complex waveform is alered by he circui is referred o as
ircuis onceps The addiion of a simple capacior o a circui of resisors allows wo relaed phenomena o occur The observaion ha he ime-dependence of a complex waveform is alered by he circui is referred o as
Delivering Better Time-of-Day Using Synchronous Ethernet and Yaakov (J) Stein, Alon Geva, Gabriel Zigelboim RAD Data Communications
 Stein, Alon Geva, Gabriel Zigelboim RAD Data Communications") Delivering Beer Time-of-Day Using Synchronous Eherne and 1588 Yaakov (J) Sein, Alon Geva, Gabriel Zigelboim RAD Daa Communicaions The problem I wan discuss he use of 1588 (or NTP for ha maer) for ime of
Delivering Beer Time-of-Day Using Synchronous Eherne and 1588 Yaakov (J) Sein, Alon Geva, Gabriel Zigelboim RAD Daa Communicaions The problem I wan discuss he use of 1588 (or NTP for ha maer) for ime of
Optimal Investment Strategy Insurance Company
 Opimal Invesmen Sraegy for a Non-Life Insurance Company Łukasz Delong Warsaw School of Economics Insiue of Economerics Division of Probabilisic Mehods Probabiliy space Ω I P F I I I he filraion saisfies
Opimal Invesmen Sraegy for a Non-Life Insurance Company Łukasz Delong Warsaw School of Economics Insiue of Economerics Division of Probabilisic Mehods Probabiliy space Ω I P F I I I he filraion saisfies
Reliability of Technical Systems
 eliabiliy of Technical Sysems Main Topics Inroducion, Key erms, framing he problem eliabiliy parameers: Failure ae, Failure Probabiliy, Availabiliy, ec. Some imporan reliabiliy disribuions Componen reliabiliy
eliabiliy of Technical Sysems Main Topics Inroducion, Key erms, framing he problem eliabiliy parameers: Failure ae, Failure Probabiliy, Availabiliy, ec. Some imporan reliabiliy disribuions Componen reliabiliy
Exponential Smoothing
 Exponenial moohing Inroducion A simple mehod for forecasing. Does no require long series. Enables o decompose he series ino a rend and seasonal effecs. Paricularly useful mehod when here is a need o forecas
Exponenial moohing Inroducion A simple mehod for forecasing. Does no require long series. Enables o decompose he series ino a rend and seasonal effecs. Paricularly useful mehod when here is a need o forecas
Applying Genetic Algorithms for Inventory Lot-Sizing Problem with Supplier Selection under Storage Space
 Inernaional Journal of Indusrial and Manufacuring Engineering Applying Geneic Algorihms for Invenory Lo-Sizing Problem wih Supplier Selecion under Sorage Space Vichai Rungreunganaun and Chirawa Woarawichai
Inernaional Journal of Indusrial and Manufacuring Engineering Applying Geneic Algorihms for Invenory Lo-Sizing Problem wih Supplier Selecion under Sorage Space Vichai Rungreunganaun and Chirawa Woarawichai
Information Relaxations and Duality in Stochastic Dynamic Programs
 OPERATIONS RESEARCH Vol. 58, No. 4, Par 1 of 2, July Augus 2010, pp. 785 801 issn 0030-364X eissn 1526-5463 10 5804 0785 informs doi 10.1287/opre.1090.0796 2010 INFORMS Informaion Relaxaions and Dualiy
OPERATIONS RESEARCH Vol. 58, No. 4, Par 1 of 2, July Augus 2010, pp. 785 801 issn 0030-364X eissn 1526-5463 10 5804 0785 informs doi 10.1287/opre.1090.0796 2010 INFORMS Informaion Relaxaions and Dualiy
2.4 Cuk converter example
 2.4 Cuk converer example C 1 Cuk converer, wih ideal swich i 1 i v 1 2 1 2 C 2 v 2 Cuk converer: pracical realizaion using MOSFET and diode C 1 i 1 i v 1 2 Q 1 D 1 C 2 v 2 28 Analysis sraegy This converer
2.4 Cuk converer example C 1 Cuk converer, wih ideal swich i 1 i v 1 2 1 2 C 2 v 2 Cuk converer: pracical realizaion using MOSFET and diode C 1 i 1 i v 1 2 Q 1 D 1 C 2 v 2 28 Analysis sraegy This converer
Essential Microeconomics : OPTIMAL CONTROL 1. Consider the following class of optimization problems
 Essenial Microeconomics -- 6.5: OPIMAL CONROL Consider he following class of opimizaion problems Max{ U( k, x) + U+ ( k+ ) k+ k F( k, x)}. { x, k+ } = In he language of conrol heory, he vecor k is he vecor
Essenial Microeconomics -- 6.5: OPIMAL CONROL Consider he following class of opimizaion problems Max{ U( k, x) + U+ ( k+ ) k+ k F( k, x)}. { x, k+ } = In he language of conrol heory, he vecor k is he vecor
Kriging Models Predicting Atrazine Concentrations in Surface Water Draining Agricultural Watersheds
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
Lecture 1 Overview. course mechanics. outline & topics. what is a linear dynamical system? why study linear systems? some examples
 EE263 Auumn 27-8 Sephen Boyd Lecure 1 Overview course mechanics ouline & opics wha is a linear dynamical sysem? why sudy linear sysems? some examples 1 1 Course mechanics all class info, lecures, homeworks,
EE263 Auumn 27-8 Sephen Boyd Lecure 1 Overview course mechanics ouline & opics wha is a linear dynamical sysem? why sudy linear sysems? some examples 1 1 Course mechanics all class info, lecures, homeworks,
Open loop vs Closed Loop. Example: Open Loop. Example: Feedforward Control. Advanced Control I
 Open loop vs Closed Loop Advanced I Moor Command Movemen Overview Open Loop vs Closed Loop Some examples Useful Open Loop lers Dynamical sysems CPG (biologically inspired ), Force Fields Feedback conrol
Open loop vs Closed Loop Advanced I Moor Command Movemen Overview Open Loop vs Closed Loop Some examples Useful Open Loop lers Dynamical sysems CPG (biologically inspired ), Force Fields Feedback conrol