Probabilistic Robotics
|
|
|
- Irma Griffin
- 5 years ago
- Views:
Transcription
1 Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers
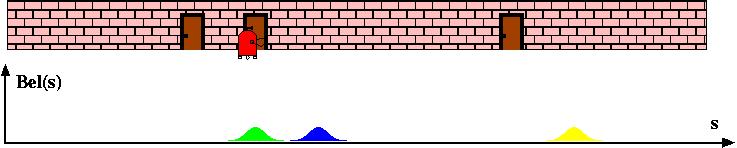
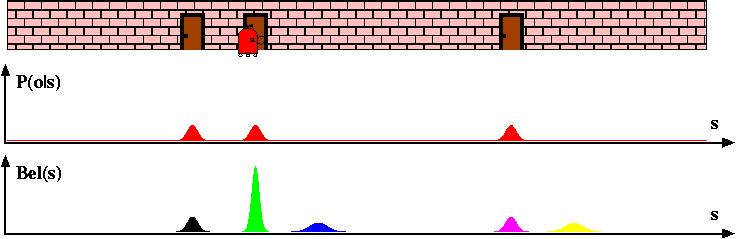
2 Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
3 Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
4 ~ ~ a b a N Y b ax Y N X Properies of Gaussians ~ ~ ~ N X p X p N X N X
5 ~ ~ A A B A N Y B AX Y N X Mulivariae Gaussians ~ ~ ~ N X p X p N X N X
6 Discree Kalman Filer Esimaes he sae of a discree-ime conrolled process ha is governed by he linear sochasic difference equaion A B u ε wih a measuremen z C δ 6
7 Componens of a Kalman Filer A B C ε δ Mari nn ha describes how he sae evolves from o - wihou conrols or noise. Mari nl ha describes how he conrol u changes he sae from o -. Mari kn ha describes how o map he sae o an observaion z. Random variables represening he process and measuremen noise ha are assumed o be independen and normally disribued wih covariance R and Q respecively. 7
8 Kalman Filer Updaes in D 8
9 9 Kalman Filer Updaes in D wih Q C C C K K C I C z K bel wih obs K K z K bel
10 0 Kalman Filer Updaes in D R A A B u A bel ac a b u a bel
11 Kalman Filer Updaes
12 Linear Gaussian Sysems: Iniializaion Iniial belief is normally disribued: bel N ;
13 3 Dynamics are linear funcion of sae and conrol plus addiive noise: u B A ε Linear Gaussian Sysems: Dynamics R B u A N u p ; ; ~ ; ~ N R B u A N d bel u p bel
14 4 Linear Gaussian Sysems: Dynamics R A A B u A bel d B u A R B u A bel N R B u A N d bel u p bel ep ep ; ~ ; ~ η
15 5 Observaions are linear funcion of sae plus addiive noise: C z δ Linear Gaussian Sysems: Observaions Q C z N z p ; N Q C z N bel z p bel ; ~ ; ~ η
16 6 Linear Gaussian Sysems: Observaions wih ep ep ; ~ ; ~ Q C C C K K C I C z K bel C z Q C z bel N Q C z N bel z p bel η η
17 Kalman Filer Algorihm. Algorihm Kalman_filer - - u z :. Predicion: A B u Correcion: K C C C Q K z C A A 9. Reurn R I K C 7
18 8 he Predicion-Correcion-Cycle R A A B u A bel ac a b u a bel Predicion
19 9 he Predicion-Correcion-Cycle Q C C C K K C I C z K bel obs K K z K bel Correcion
20 0 he Predicion-Correcion-Cycle Q C C C K K C I C z K bel obs K K z K bel R A A B u A bel ac a b u a bel Correcion Predicion
21 Kalman Filer Summary Highly efficien: Polynomial in measuremen dimensionaliy k and sae dimensionaliy n: Ok.376 n Opimal for linear Gaussian sysems! Mos roboics sysems are nonlinear!
22 Nonlinear Dynamic Sysems Mos realisic roboic problems involve nonlinear funcions g u z h
23 Lineariy Assumpion Revisied 3
24 Non-linear Funcion 4
25 EKF Linearizaion 5
26 EKF Linearizaion 6
27 EKF Linearizaion 3 7
28 8 Predicion: Correcion: EKF Linearizaion: Firs Order aylor Series Epansion G u g u g u g u g u g H h h h h h
29 9 EKF Algorihm. Eended_Kalman_filer - - u z :. Predicion: Correcion: Reurn u g R G G Q H H H K h z K H K I u g G h H u A B R A A Q C C C K C z K C K I
30 Localizaion Using sensory informaion o locae he robo in is environmen is he mos fundamenal problem o providing a mobile robo wih auonomous capabiliies. [Co 9] Given Map of he environmen. Sequence of sensor measuremens. Waned Esimae of he robo s posiion. Problem classes Posiion racking Global localizaion Kidnapped robo problem recovery 30

31 Landmark-based Localizaion 3
32 3. EKF_localizaion - - u z m: Predicion: u g V V M G G θ θ θ θ θ θ ' ' ' ' ' ' ' ' ' y y y y y y u g G v y v y v u u g V ω θ θ ω ω ' ' ' ' ' ' v v M ω α α ω α α Moion noise Jacobian of g w.r. locaion Prediced mean Prediced covariance Jacobian of g w.r. conrol
33 33. EKF_localizaion - - u z m: Correcion: ˆ z z K H K I θ θ ϕ ϕ ϕ y y r r r m h H θ aan ˆ y y y y m m m m z Q H H S S H K 0 0 r r Q Prediced measuremen mean Pred. measuremen covariance Kalman gain Updaed mean Updaed covariance Jacobian of h w.r. locaion
34 EKF Predicion Sep 34

35 EKF Observaion Predicion Sep 35
36 EKF Correcion Sep 36
37 Esimaion Sequence 37
38 Esimaion Sequence 38
39 Comparison o Groundruh 39
40 EKF Summary Highly efficien: Polynomial in measuremen dimensionaliy k and sae dimensionaliy n: Ok.376 n No opimal! Can diverge if nonlineariies are large! Works surprisingly well even when all assumpions are violaed! 40

41 Linearizaion via Unscened ransform EKF UKF 4

42 UKF Sigma-Poin Esimae EKF UKF 4
43 UKF Sigma-Poin Esimae 3 EKF UKF 43
44 44 Unscened ransform n i n w w n n w n w i c i m i i c m... for ± λ λ χ β α λ λ λ λ χ Sigma poins Weighs i i g χ ψ n i i i i c n i i i m w w 0 0 ' ' ψ ψ ψ Pass sigma poins hrough nonlinear funcion Recover mean and covariance
45 45 UKF_localizaion - - u z m: Predicion: v v M ω α α ω α α 0 0 r r Q a a Q M a a a a a a γ γ χ u u g χ χ χ L i i i i w c 0 χ χ L i i i w m 0 χ Moion noise Measuremen noise Augmened sae mean Augmened covariance Sigma poins Predicion of sigma poins Prediced mean Prediced covariance
46 UKF_localizaion - - u z m: Correcion: Ζ z χ h χ Measuremen sigma poins L i zˆ w m S i 0 L w z i 0 L i 0 i c w Ζ i Ζ z Ζ zˆ i c i ˆ i χ Ζ zˆ i i Prediced measuremen mean Pred. measuremen covariance Cross-covariance K S z K zˆ z Kalman gain Updaed mean K S K Updaed covariance 46
47 47. EKF_localizaion - - u z m: Correcion: ˆ z z K H K I θ θ ϕ ϕ ϕ y y r r r m h H θ aan ˆ y y y y m m m m z Q H H S S H K 0 0 r r Q Prediced measuremen mean Pred. measuremen covariance Kalman gain Updaed mean Updaed covariance Jacobian of h w.r. locaion
48 UKF Predicion Sep 48
49 UKF Observaion Predicion Sep 49
50 UKF Correcion Sep 50
51 EKF Correcion Sep 5
52 Esimaion Sequence EKF PF UKF 5
53 Esimaion Sequence EKF UKF 53
54 Predicion Qualiy EKF UKF 54
55 UKF Summary Highly efficien: Same compleiy as EKF wih a consan facor slower in ypical pracical applicaions Beer linearizaion han EKF: Accurae in firs wo erms of aylor epansion EKF only firs erm Derivaive-free: No Jacobians needed Sill no opimal! 55
56 Kalman Filer-based Sysem [Arras e al. 98]: Laser range-finder and vision High precision <cm accuracy [Couresy of Kai Arras] 56
57 Mulihypohesis racking 57
58 Localizaion Wih MH Belief is represened by muliple hypoheses Each hypohesis is racked by a Kalman filer Addiional problems: Daa associaion: Which observaion corresponds o which hypohesis? Hypohesis managemen: When o add / delee hypoheses? Huge body of lieraure on arge racking moion correspondence ec. 58
59 MH: Implemened Sysem Hypoheses are eraced from LRF scans Each hypohesis has probabiliy of being he correc one: H i { ˆ i i P H i } Hypohesis probabiliy is compued using Bayes rule P H i s P s H i P H P s Hypoheses wih low probabiliy are deleed. New candidaes are eraced from LRF scans. C j { z j R j} i [Jensfel e al. 00] 59

60 MH: Implemened Sysem Couresy of P. Jensfel and S. Krisensen 60
61 MH: Implemened Sysem 3 Eample run # hypoheses PH bes Map and rajecory Couresy of P. Jensfel and S. Krisensen #hypoheses vs. ime 6
Introduction to Mobile Robotics
 Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Using the Kalman filter Extended Kalman filter
 Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
CSE-473. A Gentle Introduction to Particle Filters
 CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
Two Popular Bayesian Estimators: Particle and Kalman Filters. McGill COMP 765 Sept 14 th, 2017
 Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
SEIF, EnKF, EKF SLAM. Pieter Abbeel UC Berkeley EECS
 SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of
Recursive Bayes Filtering Advanced AI
 Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
CSE-571 Robotics. Sample-based Localization (sonar) Motivation. Bayes Filter Implementations. Particle filters. Density Approximation
 Motivation. Bayes Filter Implementations. Particle filters. Density Approximation") Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Uncertainty & Localization I
 Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Robot Motion Model EKF based Localization EKF SLAM Graph SLAM
 Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Augmented Reality II - Kalman Filters - Gudrun Klinker May 25, 2004
 Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Sequential Importance Resampling (SIR) Particle Filter
 Particle Filter") Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
AUTONOMOUS SYSTEMS. Probabilistic Robotics Basics Kalman Filters Particle Filters. Sebastian Thrun
 AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
Probabilistic Fundamentals in Robotics
 Probabilisic Fundamenals in Roboics Probabilisic Models of Mobile Robos Robo localizaion Basilio Bona DAUIN Poliecnico di Torino Course Ouline Basic mahemaical framework Probabilisic models of mobile robos
Probabilisic Fundamenals in Roboics Probabilisic Models of Mobile Robos Robo localizaion Basilio Bona DAUIN Poliecnico di Torino Course Ouline Basic mahemaical framework Probabilisic models of mobile robos
Announcements. Recap: Filtering. Recap: Reasoning Over Time. Example: State Representations for Robot Localization. Particle Filtering
 Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
7630 Autonomous Robotics Probabilistic Localisation
 7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
2016 Possible Examination Questions. Robotics CSCE 574
 206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
EKF SLAM vs. FastSLAM A Comparison
 vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
2.160 System Identification, Estimation, and Learning. Lecture Notes No. 8. March 6, 2006
 2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
Data Fusion using Kalman Filter. Ioannis Rekleitis
 Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Anno accademico 2006/2007. Davide Migliore
 Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Localization and Map Making
 Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
State-Space Models. Initialization, Estimation and Smoothing of the Kalman Filter
 Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Estimation of Poses with Particle Filters
 Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Notes on Kalman Filtering
 Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Chapter 14. (Supplementary) Bayesian Filtering for State Estimation of Dynamic Systems
 Bayesian Filtering for State Estimation of Dynamic Systems") Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
CS 4495 Computer Vision Tracking 1- Kalman,Gaussian
 CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
Fundamental Problems In Robotics
 Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Linear Gaussian State Space Models
 Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Introduction to Mobile Robotics Summary
 Inroducion o Mobile Roboics Summary Wolfram Burgard Cyrill Sachniss Maren Bennewiz Diego Tipaldi Luciano Spinello Probabilisic Roboics 2 Probabilisic Roboics Key idea: Eplici represenaion of uncerainy
Inroducion o Mobile Roboics Summary Wolfram Burgard Cyrill Sachniss Maren Bennewiz Diego Tipaldi Luciano Spinello Probabilisic Roboics 2 Probabilisic Roboics Key idea: Eplici represenaion of uncerainy
An recursive analytical technique to estimate time dependent physical parameters in the presence of noise processes
 WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
Temporal probability models
 Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
מקורות לחומר בשיעור ספר הלימוד: Forsyth & Ponce מאמרים שונים חומר באינטרנט! פרק פרק 18
 עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
Monte Carlo data association for multiple target tracking
 Mone Carlo daa associaion for muliple arge racking Rickard Karlsson Dep. of Elecrical Engineering Linköping Universiy SE-58183 Linköping, Sweden E-mail: rickard@isy.liu.se Fredrik Gusafsson Dep. of Elecrical
Mone Carlo daa associaion for muliple arge racking Rickard Karlsson Dep. of Elecrical Engineering Linköping Universiy SE-58183 Linköping, Sweden E-mail: rickard@isy.liu.se Fredrik Gusafsson Dep. of Elecrical
Georey E. Hinton. University oftoronto. Technical Report CRG-TR February 22, Abstract
 Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Improved Rao-Blackwellized H filter based mobile robot SLAM
 Ocober 216, 23(5): 47 55 www.sciencedirec.com/science/journal/158885 The Journal of China Universiies of Poss and Telecommunicaions hp://jcup.bup.edu.cn Improved Rao-Blackwellized H filer based mobile
Ocober 216, 23(5): 47 55 www.sciencedirec.com/science/journal/158885 The Journal of China Universiies of Poss and Telecommunicaions hp://jcup.bup.edu.cn Improved Rao-Blackwellized H filer based mobile
Algorithms for Sensor-Based Robotics: Kalman Filters for Mapping and Localization
 Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Probabilistic Robotics The Sparse Extended Information Filter
 Probabilisic Roboics The Sparse Exended Informaion Filer MSc course Arificial Inelligence 2018 hps://saff.fnwi.uva.nl/a.visser/educaion/probabilisicroboics/ Arnoud Visser Inelligen Roboics Lab Informaics
Probabilisic Roboics The Sparse Exended Informaion Filer MSc course Arificial Inelligence 2018 hps://saff.fnwi.uva.nl/a.visser/educaion/probabilisicroboics/ Arnoud Visser Inelligen Roboics Lab Informaics
AUV positioning based on Interactive Multiple Model
 AUV posiioning based on Ineracive Muliple Model H. Q. Liu ARL, Tropical Marine Science Insiue Naional Universiy of Singapore 18 Ken Ridge Road, Singapore 1197 Email: hongqing@arl.nus.edu.sg Mandar Chire
AUV posiioning based on Ineracive Muliple Model H. Q. Liu ARL, Tropical Marine Science Insiue Naional Universiy of Singapore 18 Ken Ridge Road, Singapore 1197 Email: hongqing@arl.nus.edu.sg Mandar Chire
Financial Econometrics Kalman Filter: some applications to Finance University of Evry - Master 2
 Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
Data Assimilation. Alan O Neill National Centre for Earth Observation & University of Reading
 Daa Assimilaion Alan O Neill Naional Cenre for Earh Observaion & Universiy of Reading Conens Moivaion Univariae scalar) daa assimilaion Mulivariae vecor) daa assimilaion Opimal Inerpoleion BLUE) 3d-Variaional
Daa Assimilaion Alan O Neill Naional Cenre for Earh Observaion & Universiy of Reading Conens Moivaion Univariae scalar) daa assimilaion Mulivariae vecor) daa assimilaion Opimal Inerpoleion BLUE) 3d-Variaional
Applications in Industry (Extended) Kalman Filter. Week Date Lecture Title
 Kalman Filter. Week Date Lecture Title") hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
Excel-Based Solution Method For The Optimal Policy Of The Hadley And Whittin s Exact Model With Arma Demand
 Excel-Based Soluion Mehod For The Opimal Policy Of The Hadley And Whiin s Exac Model Wih Arma Demand Kal Nami School of Business and Economics Winson Salem Sae Universiy Winson Salem, NC 27110 Phone: (336)750-2338
Excel-Based Soluion Mehod For The Opimal Policy Of The Hadley And Whiin s Exac Model Wih Arma Demand Kal Nami School of Business and Economics Winson Salem Sae Universiy Winson Salem, NC 27110 Phone: (336)750-2338
Simultaneous Localisation and Mapping. IAR Lecture 10 Barbara Webb
 Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
Recursive Least-Squares Fixed-Interval Smoother Using Covariance Information based on Innovation Approach in Linear Continuous Stochastic Systems
 8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
Kriging Models Predicting Atrazine Concentrations in Surface Water Draining Agricultural Watersheds
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
FastSLAM: An Efficient Solution to the Simultaneous Localization And Mapping Problem with Unknown Data Association
 FasSLAM: An Efficien Soluion o he Simulaneous Localizaion And Mapping Problem wih Unknown Daa Associaion Sebasian Thrun 1, Michael Monemerlo 1, Daphne Koller 1, Ben Wegbrei 1 Juan Nieo 2, and Eduardo Nebo
FasSLAM: An Efficien Soluion o he Simulaneous Localizaion And Mapping Problem wih Unknown Daa Associaion Sebasian Thrun 1, Michael Monemerlo 1, Daphne Koller 1, Ben Wegbrei 1 Juan Nieo 2, and Eduardo Nebo
Temporal probability models. Chapter 15, Sections 1 5 1
 Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Multi-Robot Simultaneous Localization and Mapping (Multi-SLAM)
") Muli-Robo Simulaneous Localizaion and Mapping (Muli-SLAM) Kai-Chieh Ma, Zhibei Ma Absrac In his projec, we are ineresed in he exension of Simulaneous Localizaion and Mapping (SLAM) o muliple robos. By
Muli-Robo Simulaneous Localizaion and Mapping (Muli-SLAM) Kai-Chieh Ma, Zhibei Ma Absrac In his projec, we are ineresed in he exension of Simulaneous Localizaion and Mapping (SLAM) o muliple robos. By
Planning in Information Space for a Quadrotor Helicopter in a GPS-denied Environment
 Planning in Informaion Space for a Quadroor Helicoper in a GPS-denied Environmen Ruijie He, Sam Prenice and Nicholas Roy Absrac This paper describes a moion planning algorihm for a quadroor helicoper flying
Planning in Informaion Space for a Quadroor Helicoper in a GPS-denied Environmen Ruijie He, Sam Prenice and Nicholas Roy Absrac This paper describes a moion planning algorihm for a quadroor helicoper flying
Open loop vs Closed Loop. Example: Open Loop. Example: Feedforward Control. Advanced Control I
 Open loop vs Closed Loop Advanced I Moor Command Movemen Overview Open Loop vs Closed Loop Some examples Useful Open Loop lers Dynamical sysems CPG (biologically inspired ), Force Fields Feedback conrol
Open loop vs Closed Loop Advanced I Moor Command Movemen Overview Open Loop vs Closed Loop Some examples Useful Open Loop lers Dynamical sysems CPG (biologically inspired ), Force Fields Feedback conrol
An introduction to the theory of SDDP algorithm
 An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
Localization. Mobile robot localization is the problem of determining the pose of a robot relative to a given map of the environment.
 Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Tracking. Announcements
 Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Object Tracking. Computer Vision Jia-Bin Huang, Virginia Tech. Many slides from D. Hoiem
 Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
Kalman filtering for maximum likelihood estimation given corrupted observations.
 alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
alman filering maimum likelihood esimaion given corruped observaions... Holmes Naional Marine isheries Service Inroducion he alman filer is used o eend likelihood esimaion o cases wih hidden saes such
m = 41 members n = 27 (nonfounders), f = 14 (founders) 8 markers from chromosome 19
, f = 14 (founders) 8 markers from chromosome 19") Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Testing the Random Walk Model. i.i.d. ( ) r
 r") he random walk heory saes: esing he Random Walk Model µ ε () np = + np + Momen Condiions where where ε ~ i.i.d he idea here is o es direcly he resricions imposed by momen condiions. lnp lnp µ ( lnp lnp
he random walk heory saes: esing he Random Walk Model µ ε () np = + np + Momen Condiions where where ε ~ i.i.d he idea here is o es direcly he resricions imposed by momen condiions. lnp lnp µ ( lnp lnp
A Fast Numerical Fitting Approach to Calculate the Likelihood of Particles in Particle Filters
 1 A Fas Numerical Fiing Approach o Calculae he Likelihood of Paricles in Paricle Filers Tiancheng Li, Shudong Sun and Tariq P. Saar T. Li is wih he School of Mecharonics, Norhwesern Polyechnical Universiy,
1 A Fas Numerical Fiing Approach o Calculae he Likelihood of Paricles in Paricle Filers Tiancheng Li, Shudong Sun and Tariq P. Saar T. Li is wih he School of Mecharonics, Norhwesern Polyechnical Universiy,
Smoothing. Backward smoother: At any give T, replace the observation yt by a combination of observations at & before T
 Smoohing Consan process Separae signal & noise Smooh he daa: Backward smooher: A an give, replace he observaion b a combinaion of observaions a & before Simple smooher : replace he curren observaion wih
Smoohing Consan process Separae signal & noise Smooh he daa: Backward smooher: A an give, replace he observaion b a combinaion of observaions a & before Simple smooher : replace he curren observaion wih
Subway stations energy and air quality management
 Subway saions energy and air qualiy managemen wih sochasic opimizaion Trisan Rigau 1,2,4, Advisors: P. Carpenier 3, J.-Ph. Chancelier 2, M. De Lara 2 EFFICACITY 1 CERMICS, ENPC 2 UMA, ENSTA 3 LISIS, IFSTTAR
Subway saions energy and air qualiy managemen wih sochasic opimizaion Trisan Rigau 1,2,4, Advisors: P. Carpenier 3, J.-Ph. Chancelier 2, M. De Lara 2 EFFICACITY 1 CERMICS, ENPC 2 UMA, ENSTA 3 LISIS, IFSTTAR
Hidden Markov Models
 Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
A Distributed Multiple-Target Identity Management Algorithm in Sensor Networks
 A Disribued Muliple-Targe Ideniy Managemen Algorihm in Sensor Neworks Inseok Hwang, Kaushik Roy, Hamsa Balakrishnan, and Claire Tomlin Dep. of Aeronauics and Asronauics, Sanford Universiy, CA 94305 Dep.
A Disribued Muliple-Targe Ideniy Managemen Algorihm in Sensor Neworks Inseok Hwang, Kaushik Roy, Hamsa Balakrishnan, and Claire Tomlin Dep. of Aeronauics and Asronauics, Sanford Universiy, CA 94305 Dep.
OBJECTIVES OF TIME SERIES ANALYSIS
 OBJECTIVES OF TIME SERIES ANALYSIS Undersanding he dynamic or imedependen srucure of he observaions of a single series (univariae analysis) Forecasing of fuure observaions Asceraining he leading, lagging
OBJECTIVES OF TIME SERIES ANALYSIS Undersanding he dynamic or imedependen srucure of he observaions of a single series (univariae analysis) Forecasing of fuure observaions Asceraining he leading, lagging
Mapping in Dynamic Environments
 Mapping in Dynaic Environens Wolfra Burgard Universiy of Freiburg, Gerany Mapping is a Key Technology for Mobile Robos Robos can robusly navigae when hey have a ap. Robos have been shown o being able o
Mapping in Dynaic Environens Wolfra Burgard Universiy of Freiburg, Gerany Mapping is a Key Technology for Mobile Robos Robos can robusly navigae when hey have a ap. Robos have been shown o being able o
On Solving the Perturbed Multi- Revolution Lambert Problem: Applications in Enhanced SSA
 On Solving he Perurbed Muli- Revoluion Lamber Problem: Applicaions in Enhanced SSA John L. Junkins and Robyn M. Woollands Texas A&M Universiy Presened o Sacie Williams (AFOSR/RT) AFOSR REMOTE SENSING PORTFOLIO
On Solving he Perurbed Muli- Revoluion Lamber Problem: Applicaions in Enhanced SSA John L. Junkins and Robyn M. Woollands Texas A&M Universiy Presened o Sacie Williams (AFOSR/RT) AFOSR REMOTE SENSING PORTFOLIO
Speech and Language Processing
 Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Speech and Language rocessing Lecure 4 Variaional inference and sampling Informaion and Communicaions Engineering Course Takahiro Shinozaki 08//5 Lecure lan (Shinozaki s par) I gives he firs 6 lecures
Modeling Economic Time Series with Stochastic Linear Difference Equations
 A. Thiemer, SLDG.mcd, 6..6 FH-Kiel Universiy of Applied Sciences Prof. Dr. Andreas Thiemer e-mail: andreas.hiemer@fh-kiel.de Modeling Economic Time Series wih Sochasic Linear Difference Equaions Summary:
A. Thiemer, SLDG.mcd, 6..6 FH-Kiel Universiy of Applied Sciences Prof. Dr. Andreas Thiemer e-mail: andreas.hiemer@fh-kiel.de Modeling Economic Time Series wih Sochasic Linear Difference Equaions Summary:
Stochastic Signals and Systems
 Sochasic Signals and Sysems Conens 1. Probabiliy Theory. Sochasic Processes 3. Parameer Esimaion 4. Signal Deecion 5. Specrum Analysis 6. Opimal Filering Chaper 6 / Sochasic Signals and Sysems / Prof.
Sochasic Signals and Sysems Conens 1. Probabiliy Theory. Sochasic Processes 3. Parameer Esimaion 4. Signal Deecion 5. Specrum Analysis 6. Opimal Filering Chaper 6 / Sochasic Signals and Sysems / Prof.
References are appeared in the last slide. Last update: (1393/08/19)
") SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
Simultaneous Localization and Mapping with Unknown Data Association Using FastSLAM
 Simulaneous Localizaion and Mapping wih Unknown Daa Associaion Using FasSLAM Michael Monemerlo, Sebasian Thrun Absrac The Exended Kalman Filer (EKF has been he de faco approach o he Simulaneous Localizaion
Simulaneous Localizaion and Mapping wih Unknown Daa Associaion Using FasSLAM Michael Monemerlo, Sebasian Thrun Absrac The Exended Kalman Filer (EKF has been he de faco approach o he Simulaneous Localizaion
Computer Vision 2 Lecture 6
 Compuer Vision 2 Lecure 6 Beond Kalman Filers (09.05.206) leibe@vision.rwh-aachen.de, sueckler@vision.rwh-aachen.de RWTH Aachen Universi, Compuer Vision Group hp://www.vision.rwh-aachen.de Conen of he
Compuer Vision 2 Lecure 6 Beond Kalman Filers (09.05.206) leibe@vision.rwh-aachen.de, sueckler@vision.rwh-aachen.de RWTH Aachen Universi, Compuer Vision Group hp://www.vision.rwh-aachen.de Conen of he
(1) (2) Differentiation of (1) and then substitution of (3) leads to. Therefore, we will simply consider the second-order linear system given by (4)
 (2) Differentiation of (1) and then substitution of (3) leads to. Therefore, we will simply consider the second-order linear system given by (4)") Phase Plane Analysis of Linear Sysems Adaped from Applied Nonlinear Conrol by Sloine and Li The general form of a linear second-order sysem is a c b d From and b bc d a Differeniaion of and hen subsiuion
Phase Plane Analysis of Linear Sysems Adaped from Applied Nonlinear Conrol by Sloine and Li The general form of a linear second-order sysem is a c b d From and b bc d a Differeniaion of and hen subsiuion
Recursive Estimation and Identification of Time-Varying Long- Term Fading Channels
 Recursive Esimaion and Idenificaion of ime-varying Long- erm Fading Channels Mohammed M. Olama, Kiran K. Jaladhi, Seddi M. Djouadi, and Charalambos D. Charalambous 2 Universiy of ennessee Deparmen of Elecrical
Recursive Esimaion and Idenificaion of ime-varying Long- erm Fading Channels Mohammed M. Olama, Kiran K. Jaladhi, Seddi M. Djouadi, and Charalambos D. Charalambous 2 Universiy of ennessee Deparmen of Elecrical
Lecture 1 Overview. course mechanics. outline & topics. what is a linear dynamical system? why study linear systems? some examples
 EE263 Auumn 27-8 Sephen Boyd Lecure 1 Overview course mechanics ouline & opics wha is a linear dynamical sysem? why sudy linear sysems? some examples 1 1 Course mechanics all class info, lecures, homeworks,
EE263 Auumn 27-8 Sephen Boyd Lecure 1 Overview course mechanics ouline & opics wha is a linear dynamical sysem? why sudy linear sysems? some examples 1 1 Course mechanics all class info, lecures, homeworks,
FastSLAM 2.0: An Improved Particle Filtering Algorithm for Simultaneous Localization and Mapping that Provably Converges
 Proceedings of IJCAI 2003 FasSLAM 2.0: An Improved Paricle Filering Algorihm for Simulaneous Localizaion and Mapping ha Provably Converges Michael Monemerlo and Sebasian Thrun School of Compuer Science
Proceedings of IJCAI 2003 FasSLAM 2.0: An Improved Paricle Filering Algorihm for Simulaneous Localizaion and Mapping ha Provably Converges Michael Monemerlo and Sebasian Thrun School of Compuer Science
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Overview. COMP14112: Artificial Intelligence Fundamentals. Lecture 0 Very Brief Overview. Structure of this course
 OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
MCMC-Based Particle Filtering for Tracking a Variable Number of Interacting Targets. Zia Khan, Tucker Balch, and Frank Dellaert
 1 MCMC-Based Paricle Filering for Tracking a Variable Number of Ineracing Targes Zia Khan, Tucker Balch, and Frank Dellaer 2 Absrac We describe a paricle filer ha effecively deals wih ineracing arges -
1 MCMC-Based Paricle Filering for Tracking a Variable Number of Ineracing Targes Zia Khan, Tucker Balch, and Frank Dellaer 2 Absrac We describe a paricle filer ha effecively deals wih ineracing arges -
CptS 570 Machine Learning School of EECS Washington State University. CptS Machine Learning 1
 CpS 570 Machine Learning School of EECS Washingon Sae Universiy CpS 570 - Machine Learning 1 Form of underlying disribuions unknown Bu sill wan o perform classificaion and regression Semi-parameric esimaion
CpS 570 Machine Learning School of EECS Washingon Sae Universiy CpS 570 - Machine Learning 1 Form of underlying disribuions unknown Bu sill wan o perform classificaion and regression Semi-parameric esimaion
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM
 WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
WATER LEVEL TRACKING WITH CONDENSATION ALGORITHM Shinsuke KOBAYASHI, Shogo MURAMATSU, Hisakazu KIKUCHI, Masahiro IWAHASHI Dep. of Elecrical and Elecronic Eng., Niigaa Universiy, 8050 2-no-cho Igarashi,
F2E5216/TS1002 Adaptive Filtering and Change Detection. Likelihood Ratio based Change Detection Tests. Gaussian Case. Recursive Formulation
 Adapive Filering and Change Deecion Fredrik Gusafsson (LiTH and Bo Wahlberg (KTH Likelihood Raio based Change Deecion Tess Hypohesis es: H : no jump H 1 (k, ν : a jump of magniude ν a ime k. Lecure 8 Filer
Adapive Filering and Change Deecion Fredrik Gusafsson (LiTH and Bo Wahlberg (KTH Likelihood Raio based Change Deecion Tess Hypohesis es: H : no jump H 1 (k, ν : a jump of magniude ν a ime k. Lecure 8 Filer
Vectorautoregressive Model and Cointegration Analysis. Time Series Analysis Dr. Sevtap Kestel 1
 Vecorauoregressive Model and Coinegraion Analysis Par V Time Series Analysis Dr. Sevap Kesel 1 Vecorauoregression Vecor auoregression (VAR) is an economeric model used o capure he evoluion and he inerdependencies
Vecorauoregressive Model and Coinegraion Analysis Par V Time Series Analysis Dr. Sevap Kesel 1 Vecorauoregression Vecor auoregression (VAR) is an economeric model used o capure he evoluion and he inerdependencies
Ordinary differential equations. Phys 750 Lecture 7
 Ordinary differenial equaions Phys 750 Lecure 7 Ordinary Differenial Equaions Mos physical laws are expressed as differenial equaions These come in hree flavours: iniial-value problems boundary-value problems
Ordinary differenial equaions Phys 750 Lecure 7 Ordinary Differenial Equaions Mos physical laws are expressed as differenial equaions These come in hree flavours: iniial-value problems boundary-value problems
Chapter 1 Fundamental Concepts
 Chaper 1 Fundamenal Conceps 1 Signals A signal is a paern of variaion of a physical quaniy, ofen as a funcion of ime (bu also space, disance, posiion, ec). These quaniies are usually he independen variables
Chaper 1 Fundamenal Conceps 1 Signals A signal is a paern of variaion of a physical quaniy, ofen as a funcion of ime (bu also space, disance, posiion, ec). These quaniies are usually he independen variables
hen found from Bayes rule. Specically, he prior disribuion is given by p( ) = N( ; ^ ; r ) (.3) where r is he prior variance (we add on he random drif
 = N( ; ^ ; r ) (.3) where r is he prior variance (we add on he random drif") Chaper Kalman Filers. Inroducion We describe Bayesian Learning for sequenial esimaion of parameers (eg. means, AR coeciens). The updae procedures are known as Kalman Filers. We show how Dynamic Linear
Chaper Kalman Filers. Inroducion We describe Bayesian Learning for sequenial esimaion of parameers (eg. means, AR coeciens). The updae procedures are known as Kalman Filers. We show how Dynamic Linear
Filtering Turbulent Signals Using Gaussian and non-gaussian Filters with Model Error
 Filering Turbulen Signals Using Gaussian and non-gaussian Filers wih Model Error June 3, 3 Nan Chen Cener for Amosphere Ocean Science (CAOS) Couran Insiue of Sciences New York Universiy / I. Ouline Use
Filering Turbulen Signals Using Gaussian and non-gaussian Filers wih Model Error June 3, 3 Nan Chen Cener for Amosphere Ocean Science (CAOS) Couran Insiue of Sciences New York Universiy / I. Ouline Use
Motion Planning under Uncertainty using Iterative Local Optimization in Belief Space
 Moion Planning under Uncerainy using Ieraive Local Opimizaion in Belief Space Jur van den Berg 1 Sachin Pail 2 Ron Aleroviz 2 1 School of Compuing, Universiy of Uah, berg@cs.uah.edu. 2 Dep. of Compuer
Moion Planning under Uncerainy using Ieraive Local Opimizaion in Belief Space Jur van den Berg 1 Sachin Pail 2 Ron Aleroviz 2 1 School of Compuing, Universiy of Uah, berg@cs.uah.edu. 2 Dep. of Compuer
Presentation Overview
 Acion Refinemen in Reinforcemen Learning by Probabiliy Smoohing By Thomas G. Dieerich & Didac Busques Speaer: Kai Xu Presenaion Overview Bacground The Probabiliy Smoohing Mehod Experimenal Sudy of Acion
Acion Refinemen in Reinforcemen Learning by Probabiliy Smoohing By Thomas G. Dieerich & Didac Busques Speaer: Kai Xu Presenaion Overview Bacground The Probabiliy Smoohing Mehod Experimenal Sudy of Acion
Modal identification of structures from roving input data by means of maximum likelihood estimation of the state space model
 Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Fixed-lag Sampling Strategies for Particle Filtering SLAM
 To appear in he 7 IEEE Inernaional Conference on Roboics & Auomaion (ICRA 7) Fixed-lag Sampling Sraegies for Paricle Filering SLAM Krisopher R. Beevers and Wesley H. Huang Absrac We describe wo new sampling
To appear in he 7 IEEE Inernaional Conference on Roboics & Auomaion (ICRA 7) Fixed-lag Sampling Sraegies for Paricle Filering SLAM Krisopher R. Beevers and Wesley H. Huang Absrac We describe wo new sampling
Institute for Mathematical Methods in Economics. University of Technology Vienna. Singapore, May Manfred Deistler
 MULTIVARIATE TIME SERIES ANALYSIS AND FORECASTING Manfred Deisler E O S Economerics and Sysems Theory Insiue for Mahemaical Mehods in Economics Universiy of Technology Vienna Singapore, May 2004 Inroducion
MULTIVARIATE TIME SERIES ANALYSIS AND FORECASTING Manfred Deisler E O S Economerics and Sysems Theory Insiue for Mahemaical Mehods in Economics Universiy of Technology Vienna Singapore, May 2004 Inroducion
A PROBABILISTIC MULTIMODAL ALGORITHM FOR TRACKING MULTIPLE AND DYNAMIC OBJECTS
 A PROBABILISTIC MULTIMODAL ALGORITHM FOR TRACKING MULTIPLE AND DYNAMIC OBJECTS MARTA MARRÓN, ELECTRONICS. ALCALÁ UNIV. SPAIN mara@depeca.uah.es MIGUEL A. SOTELO, ELECTRONICS. ALCALÁ UNIV. SPAIN soelo@depeca.uah.es
A PROBABILISTIC MULTIMODAL ALGORITHM FOR TRACKING MULTIPLE AND DYNAMIC OBJECTS MARTA MARRÓN, ELECTRONICS. ALCALÁ UNIV. SPAIN mara@depeca.uah.es MIGUEL A. SOTELO, ELECTRONICS. ALCALÁ UNIV. SPAIN soelo@depeca.uah.es
Simulation-Solving Dynamic Models ABE 5646 Week 2, Spring 2010
 Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid
Simulaion-Solving Dynamic Models ABE 5646 Week 2, Spring 2010 Week Descripion Reading Maerial 2 Compuer Simulaion of Dynamic Models Finie Difference, coninuous saes, discree ime Simple Mehods Euler Trapezoid