SEIF, EnKF, EKF SLAM. Pieter Abbeel UC Berkeley EECS
|
|
|
- Earl Shepherd
- 5 years ago
- Views:
Transcription
1 SEIF, EnKF, EKF SLAM Pieer Abbeel UC Berkeley EECS
2 Informaion Filer From an analyical poin of view == Kalman filer Difference: keep rack of he inverse covariance raher han he covariance marix [maer of some linear algebra manipulaions o ge ino his form] Why ineresing? Inverse covariance marix = 0 is easier o work wih han covariance marix = infiniy (case of complee uncerainy) Inverse covariance marix is ofen sparser han he covariance marix --- for he insiders : inverse covariance marix enry (i,j) = 0 if x i is condiionally independen of x j given some se {x k, x l, } Downside: when exended o non-linear seing, need o solve a linear sysem o find he mean (around which one can hen linearize) See Probabilisic Roboics pp for more in-deph pros/cons and Probabilisic Roboics Chaper 12 for is relevance o SLAM (hen ofen referred o as he sparse exended informaion filer (SEIF) )
3 Ensemble Kalman filer (enkf) Represen he Gaussian disribuion by samples Empirically: even 40 samples can rack he amospheric sae wih high accuracy wih enkf <-> UKF: 2 * n sigma-poins, n = hen sill forms covariance marices for updaes The inellecual innovaion: Transforming he Kalman filer updaes ino updaes which can be compued based upon samples and which produce samples while never explicily represening he covariance marix
4 KF enkf Keep rack of µ, Keep rack of ensemble [x 1,, x N ] Predicion: µ Σ Correcion: = µ 1 = A + B u A Σ A + R 1 T T T K = ΣC ( C ΣC + Q ) µ = µ + K z C µ ) ( Σ = ( I K C ) Σ 1 Can updae he ensemble by simply propagaing hrough he dynamics model + adding sampled noise? Reurn µ, Σ
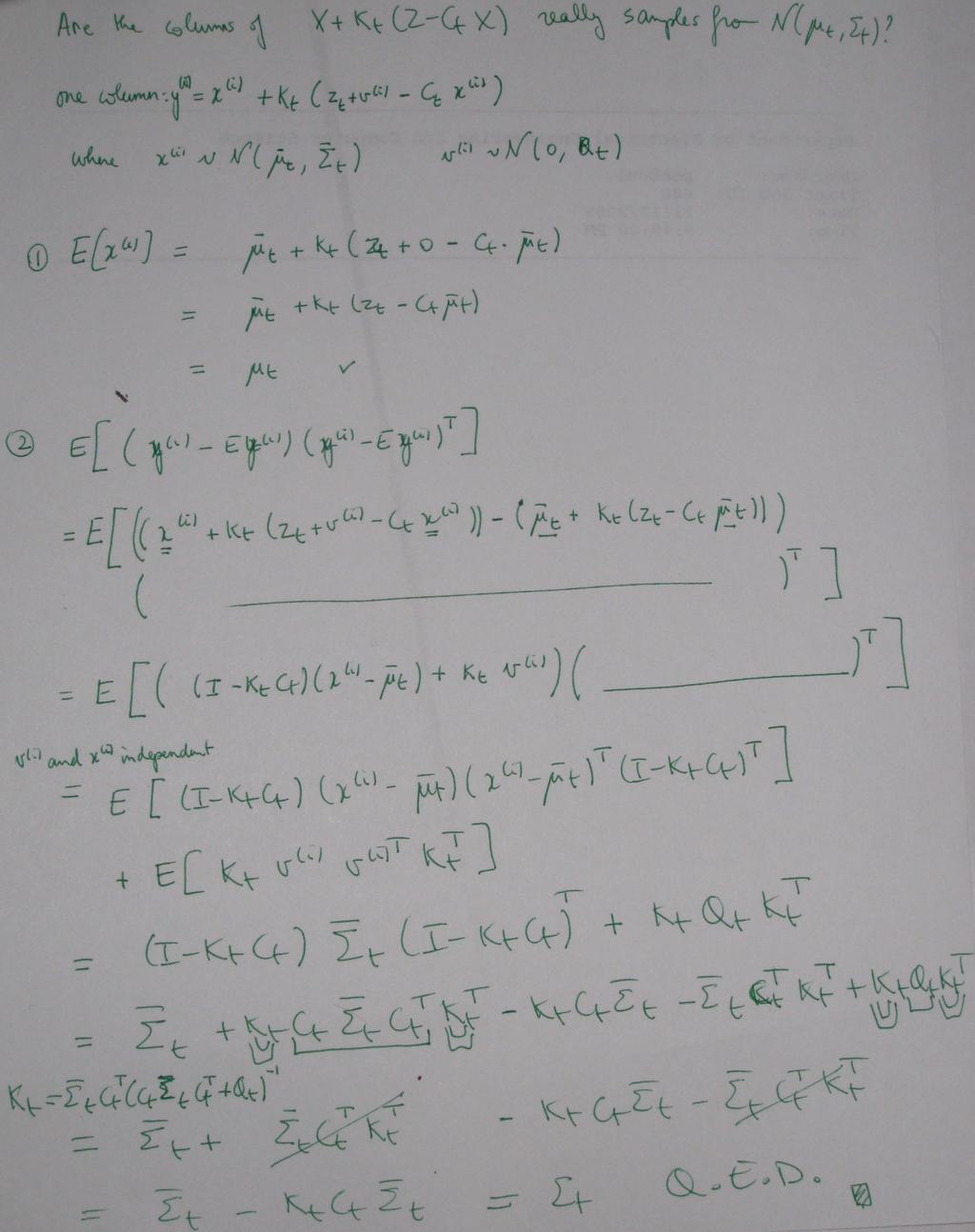
5 enkf correcion sep KF: T T K = ΣC ( C ΣC + Q ) µ = µ + K z C µ ) ( Σ = ( I K C ) Σ 1 Curren ensemble X = [x 1,, x N ] Build observaions marix Z = [z +v 1 z +v N ] where v i are sampled according o he observaion noise model Then he columns of X + K (Z C X) form a se of random samples from he poserior Noe: when compuing K, leave in he forma = [x 1 -µ x N -µ ] [x 1 -µ x N -µ ] T
6 How abou C? Indeed, would be expensive o build up C. However: careful inspecion shows ha C only appears as in: C X C C T = C X X T C T à can simply compue h(x) for all columns x of X and compue he empirical covariance marices required [deails lef as exercise]
7
8 References for enkf Mandel, 2007 A brief uorial on he Ensemble Kalman Filer Evensen, 2009, The ensemble Kalman filer for combined sae and parameer esimaion
9 KF Summary Kalman filer exac under linear Gaussian assumpions Exension o non-linear seing: Exended Kalman filer Unscened Kalman filer Exension o exremely large scale seings: Ensemble Kalman filer Sparse Informaion filer Main limiaion: resriced o unimodal / Gaussian looking disribuions Can alleviae by running muliple XKFs + keeping rack of he likelihood; bu his is sill limied in erms of represenaional power unless we allow a very large number of hem
10 EKF/UKF SLAM R B E H A D G C Sae: (n R, e R, θ R, n A, e A, n B, e B, nf C, e C, n D, e D, n E, e E, n F, e F, n G, e G, n H, e H ) Now map = locaion of landmarks (vs. gridmaps) Transiion model: Robo moion model; Landmarks say in place
11 Simulaneous Localizaion and Mapping (SLAM) In pracice: robo is no aware of all landmarks from he beginning Moreover: no use in keeping rack of landmarks he robo has no received any measuremens abou à Incremenally grow he sae when new landmarks ge encounered.
12 Simulaneous Localizaion and Mapping (SLAM) Landmark measuremen model: robo measures [ x k ; y k ], he posiion of landmark k expressed in coordinae frame aached o he robo: h(n R, e R, θ R, n k, e k ) = [x k ; y k ] = R(θ) ( [n k ; e k ] - [n R ; e R ] ) Ofen also some odomery measuremens E.g., wheel encoders As hey measure he conrol inpu being applied, hey are ofen incorporaed direcly as conrol inpus (why?)

13 Vicoria Park Daa Se [couresy by E. Nebo]

14 Vicoria Park Daa Se Vehicle [couresy by E. Nebo]

15 Daa Acquisiion [couresy by E. Nebo]
16 Esimaed Trajecory [couresy by E. Nebo] 18

17 EKF SLAM Applicaion [couresy by J. Leonard] 19
18 EKF SLAM Applicaion odomery esimaed rajecory [couresy by John Leonard] 20

19 Landmark-based Localizaion 21
20 EKF-SLAM: pracical challenges Defining landmarks Laser range finder: Disinc geomeric feaures (e.g. use RANSAC o find lines, hen use corners as feaures) Camera: ineres poin deecors, exures, color, Ofen need o rack muliple hypoheses à à Daa associaion/correspondence problem: when seeing feaures ha consiue a landmark --- Which landmark is i? Closing he loop problem: how o know you are closing a loop? Can spli off muliple EKFs whenever here is ambiguiy; Keep rack of he likelihood score of each EKF and discard he ones wih low likelihood score Compuaional complexiy wih large numbers of landmarks.
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilistic Robotics SLAM
 Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilisic Roboics SLAM The SLAM Problem SLAM is he process by which a robo builds a map of he environmen and, a he same ime, uses his map o compue is locaion Localizaion: inferring locaion given a map
Probabilistic Robotics
 Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Probabilisic Roboics Bayes Filer Implemenaions Gaussian filers Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel Gaussians : ~ π e p N p - Univariae / / : ~ μ μ μ e p Ν p d π Mulivariae
Introduction to Mobile Robotics SLAM: Simultaneous Localization and Mapping
 Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
Inroducion o Mobile Roboics SLAM: Simulaneous Localizaion and Mapping Wolfram Burgard, Maren Bennewiz, Diego Tipaldi, Luciano Spinello Wha is SLAM? Esimae he pose of a robo and he map of he environmen
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS. NA568 Mobile Robotics: Methods & Algorithms
 L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
L07. KALMAN FILTERING FOR NON-LINEAR SYSTEMS NA568 Mobile Roboics: Mehods & Algorihms Today s Topic Quick review on (Linear) Kalman Filer Kalman Filering for Non-Linear Sysems Exended Kalman Filer (EKF)
Introduction to Mobile Robotics
 Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
Inroducion o Mobile Roboics Bayes Filer Kalman Filer Wolfram Burgard Cyrill Sachniss Giorgio Grisei Maren Bennewiz Chrisian Plagemann Bayes Filer Reminder Predicion bel p u bel d Correcion bel η p z bel
EKF SLAM vs. FastSLAM A Comparison
 vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
vs. A Comparison Michael Calonder, Compuer Vision Lab Swiss Federal Insiue of Technology, Lausanne EPFL) michael.calonder@epfl.ch The wo algorihms are described wih a planar robo applicaion in mind. Generalizaion
Using the Kalman filter Extended Kalman filter
 Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Using he Kalman filer Eended Kalman filer Doz. G. Bleser Prof. Sricker Compuer Vision: Objec and People Tracking SA- Ouline Recap: Kalman filer algorihm Using Kalman filers Eended Kalman filer algorihm
Probabilistic Robotics The Sparse Extended Information Filter
 Probabilisic Roboics The Sparse Exended Informaion Filer MSc course Arificial Inelligence 2018 hps://saff.fnwi.uva.nl/a.visser/educaion/probabilisicroboics/ Arnoud Visser Inelligen Roboics Lab Informaics
Probabilisic Roboics The Sparse Exended Informaion Filer MSc course Arificial Inelligence 2018 hps://saff.fnwi.uva.nl/a.visser/educaion/probabilisicroboics/ Arnoud Visser Inelligen Roboics Lab Informaics
Announcements. Recap: Filtering. Recap: Reasoning Over Time. Example: State Representations for Robot Localization. Particle Filtering
 Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Inroducion o Arificial Inelligence V22.0472-001 Fall 2009 Lecure 18: aricle & Kalman Filering Announcemens Final exam will be a 7pm on Wednesday December 14 h Dae of las class 1.5 hrs long I won ask anyhing
Robot Motion Model EKF based Localization EKF SLAM Graph SLAM
 Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Robo Moion Model EKF based Localizaion EKF SLAM Graph SLAM General Robo Moion Model Robo sae v r Conrol a ime Sae updae model Noise model of robo conrol Noise model of conrol Robo moion model
Two Popular Bayesian Estimators: Particle and Kalman Filters. McGill COMP 765 Sept 14 th, 2017
 Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Two Popular Bayesian Esimaors: Paricle and Kalman Filers McGill COMP 765 Sep 14 h, 2017 1 1 1, dx x Bel x u x P x z P Recall: Bayes Filers,,,,,,, 1 1 1 1 u z u x P u z u x z P Bayes z = observaion u =
Zürich. ETH Master Course: L Autonomous Mobile Robots Localization II
 Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Roland Siegwar Margaria Chli Paul Furgale Marco Huer Marin Rufli Davide Scaramuzza ETH Maser Course: 151-0854-00L Auonomous Mobile Robos Localizaion II ACT and SEE For all do, (predicion updae / ACT),
Notes on Kalman Filtering
 Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
Noes on Kalman Filering Brian Borchers and Rick Aser November 7, Inroducion Daa Assimilaion is he problem of merging model predicions wih acual measuremens of a sysem o produce an opimal esimae of he curren
2016 Possible Examination Questions. Robotics CSCE 574
 206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
206 Possible Examinaion Quesions Roboics CSCE 574 ) Wha are he differences beween Hydraulic drive and Shape Memory Alloy drive? Name one applicaion in which each one of hem is appropriae. 2) Wha are he
Sequential Importance Resampling (SIR) Particle Filter
 Particle Filter") Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Paricle Filers++ Pieer Abbeel UC Berkeley EECS Many slides adaped from Thrun, Burgard and Fox, Probabilisic Roboics 1. Algorihm paricle_filer( S -1, u, z ): 2. Sequenial Imporance Resampling (SIR) Paricle
Data Fusion using Kalman Filter. Ioannis Rekleitis
 Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Daa Fusion using Kalman Filer Ioannis Rekleiis Eample of a arameerized Baesian Filer: Kalman Filer Kalman filers (KF represen poserior belief b a Gaussian (normal disribuion A -d Gaussian disribuion is
Augmented Reality II - Kalman Filters - Gudrun Klinker May 25, 2004
 Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
Augmened Realiy II Kalman Filers Gudrun Klinker May 25, 2004 Ouline Moivaion Discree Kalman Filer Modeled Process Compuing Model Parameers Algorihm Exended Kalman Filer Kalman Filer for Sensor Fusion Lieraure
7630 Autonomous Robotics Probabilistic Localisation
 7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
7630 Auonomous Roboics Probabilisic Localisaion Principles of Probabilisic Localisaion Paricle Filers for Localisaion Kalman Filer for Localisaion Based on maerial from R. Triebel, R. Käsner, R. Siegwar,
Tracking. Announcements
 Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Tracking Tuesday, Nov 24 Krisen Grauman UT Ausin Announcemens Pse 5 ou onigh, due 12/4 Shorer assignmen Auo exension il 12/8 I will no hold office hours omorrow 5 6 pm due o Thanksgiving 1 Las ime: Moion
Probabilistic Fundamentals in Robotics
 Probabilisic Fundamenals in Roboics Probabilisic Models of Mobile Robos Robo localizaion Basilio Bona DAUIN Poliecnico di Torino Course Ouline Basic mahemaical framework Probabilisic models of mobile robos
Probabilisic Fundamenals in Roboics Probabilisic Models of Mobile Robos Robo localizaion Basilio Bona DAUIN Poliecnico di Torino Course Ouline Basic mahemaical framework Probabilisic models of mobile robos
State-Space Models. Initialization, Estimation and Smoothing of the Kalman Filter
 Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
Sae-Space Models Iniializaion, Esimaion and Smoohing of he Kalman Filer Iniializaion of he Kalman Filer The Kalman filer shows how o updae pas predicors and he corresponding predicion error variances when
מקורות לחומר בשיעור ספר הלימוד: Forsyth & Ponce מאמרים שונים חומר באינטרנט! פרק פרק 18
 עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
עקיבה מקורות לחומר בשיעור ספר הלימוד: פרק 5..2 Forsh & once פרק 8 מאמרים שונים חומר באינטרנט! Toda Tracking wih Dnamics Deecion vs. Tracking Tracking as probabilisic inference redicion and Correcion Linear
Anno accademico 2006/2007. Davide Migliore
 Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Roboica Anno accademico 2006/2007 Davide Migliore migliore@ele.polimi.i Today Eercise session: An Off-side roblem Robo Vision Task Measuring NBA layers erformance robabilisic Roboics Inroducion The Bayesian
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
CS 4495 Computer Vision Tracking 1- Kalman,Gaussian
 CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
CS 4495 Compuer Vision A. Bobick CS 4495 Compuer Vision - KalmanGaussian Aaron Bobick School of Ineracive Compuing CS 4495 Compuer Vision A. Bobick Adminisrivia S5 will be ou his Thurs Due Sun Nov h :55pm
Simultaneous Localization and Mapping with Unknown Data Association Using FastSLAM
 Simulaneous Localizaion and Mapping wih Unknown Daa Associaion Using FasSLAM Michael Monemerlo, Sebasian Thrun Absrac The Exended Kalman Filer (EKF has been he de faco approach o he Simulaneous Localizaion
Simulaneous Localizaion and Mapping wih Unknown Daa Associaion Using FasSLAM Michael Monemerlo, Sebasian Thrun Absrac The Exended Kalman Filer (EKF has been he de faco approach o he Simulaneous Localizaion
CSE-571 Robotics. Sample-based Localization (sonar) Motivation. Bayes Filter Implementations. Particle filters. Density Approximation
 Motivation. Bayes Filter Implementations. Particle filters. Density Approximation") Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Moivaion CSE57 Roboics Bayes Filer Implemenaions Paricle filers So far, we discussed he Kalman filer: Gaussian, linearizaion problems Paricle filers are a way o efficienly represen nongaussian disribuions
Recursive Bayes Filtering Advanced AI
 Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Recursive Bayes Filering Advanced AI Wolfram Burgard Tuorial Goal To familiarie you wih probabilisic paradigm in roboics! Basic echniques Advanages ifalls and limiaions! Successful Applicaions! Open research
Algorithms for Sensor-Based Robotics: Kalman Filters for Mapping and Localization
 Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Algorihms for Sensor-Based Roboics: Kalman Filers for Mapping and Localizaion Sensors! Laser Robos link o he eernal world (obsession wih deph) Sensors, sensors, sensors! and racking wha is sensed: world
Linear Gaussian State Space Models
 Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
Linear Gaussian Sae Space Models Srucural Time Series Models Level and Trend Models Basic Srucural Model (BSM Dynamic Linear Models Sae Space Model Represenaion Level, Trend, and Seasonal Models Time Varying
m = 41 members n = 27 (nonfounders), f = 14 (founders) 8 markers from chromosome 19
, f = 14 (founders) 8 markers from chromosome 19") Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Sequenial Imporance Sampling (SIS) AKA Paricle Filering, Sequenial Impuaion (Kong, Liu, Wong, 994) For many problems, sampling direcly from he arge disribuion is difficul or impossible. One reason possible
Tracking. Many slides adapted from Kristen Grauman, Deva Ramanan
 Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Tracking Man slides adaped from Krisen Grauman Deva Ramanan Coures G. Hager Coures G. Hager J. Kosecka cs3b Adapive Human-Moion Tracking Acquisiion Decimaion b facor 5 Moion deecor Grascale convers. Image
Applications in Industry (Extended) Kalman Filter. Week Date Lecture Title
 Kalman Filter. Week Date Lecture Title") hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
hp://elec34.com Applicaions in Indusry (Eended) Kalman Filer 26 School of Informaion echnology and Elecrical Engineering a he Universiy of Queensland Lecure Schedule: Week Dae Lecure ile 29-Feb Inroducion
AUTONOMOUS SYSTEMS. Probabilistic Robotics Basics Kalman Filters Particle Filters. Sebastian Thrun
 AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
AUTONOMOUS SYSTEMS robabilisic Roboics Basics Kalman Filers aricle Filers Sebasian Thrun slides based on maerial from hp://robos.sanford.edu/probabilisic-roboics/pp/ Revisions and Add-Ins by edro U. Lima
Simultaneous Localisation and Mapping. IAR Lecture 10 Barbara Webb
 Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
Simuaneous Locaisaion and Mapping IAR Lecure 0 Barbara Webb Wha is SLAM? Sar in an unknown ocaion and unknown environmen and incremenay buid a map of he environmen whie simuaneousy using his map o compue
Localization and Map Making
 Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
Localiaion and Map Making My old office DILab a UTK ar of he following noes are from he book robabilisic Roboics by S. Thrn W. Brgard and D. Fo Two Remaining Qesions Where am I? Localiaion Where have I
An recursive analytical technique to estimate time dependent physical parameters in the presence of noise processes
 WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
WHAT IS A KALMAN FILTER An recursive analyical echnique o esimae ime dependen physical parameers in he presence of noise processes Example of a ime and frequency applicaion: Offse beween wo clocks PREDICTORS,
Hidden Markov Models
 Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Hidden Markov Models Probabilisic reasoning over ime So far, we ve mosly deal wih episodic environmens Excepions: games wih muliple moves, planning In paricular, he Bayesian neworks we ve seen so far describe
Temporal probability models
 Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Temporal probabiliy models CS194-10 Fall 2011 Lecure 25 CS194-10 Fall 2011 Lecure 25 1 Ouline Hidden variables Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic
Temporal probability models. Chapter 15, Sections 1 5 1
 Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Temporal probabiliy models Chaper 15, Secions 1 5 Chaper 15, Secions 1 5 1 Ouline Time and uncerainy Inerence: ilering, predicion, smoohing Hidden Markov models Kalman ilers (a brie menion) Dynamic Bayesian
Fundamental Problems In Robotics
 Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Fundamenal Problems In Roboics Wha does he world looks like? (mapping sense from various posiions inegrae measuremens o produce map assumes perfec knowledge of posiion Where am I in he world? (localizaion
Georey E. Hinton. University oftoronto. Technical Report CRG-TR February 22, Abstract
 Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Parameer Esimaion for Linear Dynamical Sysems Zoubin Ghahramani Georey E. Hinon Deparmen of Compuer Science Universiy oftorono 6 King's College Road Torono, Canada M5S A4 Email: zoubin@cs.orono.edu Technical
Chapter 14. (Supplementary) Bayesian Filtering for State Estimation of Dynamic Systems
 Bayesian Filtering for State Estimation of Dynamic Systems") Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
Chaper 4. Supplemenary Bayesian Filering for Sae Esimaion of Dynamic Sysems Neural Neworks and Learning Machines Haykin Lecure Noes on Selflearning Neural Algorihms ByoungTak Zhang School of Compuer Science
Multi-Robot Simultaneous Localization and Mapping (Multi-SLAM)
") Muli-Robo Simulaneous Localizaion and Mapping (Muli-SLAM) Kai-Chieh Ma, Zhibei Ma Absrac In his projec, we are ineresed in he exension of Simulaneous Localizaion and Mapping (SLAM) o muliple robos. By
Muli-Robo Simulaneous Localizaion and Mapping (Muli-SLAM) Kai-Chieh Ma, Zhibei Ma Absrac In his projec, we are ineresed in he exension of Simulaneous Localizaion and Mapping (SLAM) o muliple robos. By
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Book Corrections for Optimal Estimation of Dynamic Systems, 2 nd Edition
 Boo Correcions for Opimal Esimaion of Dynamic Sysems, nd Ediion John L. Crassidis and John L. Junins November 17, 017 Chaper 1 This documen provides correcions for he boo: Crassidis, J.L., and Junins,
Boo Correcions for Opimal Esimaion of Dynamic Sysems, nd Ediion John L. Crassidis and John L. Junins November 17, 017 Chaper 1 This documen provides correcions for he boo: Crassidis, J.L., and Junins,
0.1 MAXIMUM LIKELIHOOD ESTIMATION EXPLAINED
 0.1 MAXIMUM LIKELIHOOD ESTIMATIO EXPLAIED Maximum likelihood esimaion is a bes-fi saisical mehod for he esimaion of he values of he parameers of a sysem, based on a se of observaions of a random variable
0.1 MAXIMUM LIKELIHOOD ESTIMATIO EXPLAIED Maximum likelihood esimaion is a bes-fi saisical mehod for he esimaion of he values of he parameers of a sysem, based on a se of observaions of a random variable
Computer Vision 2 Lecture 6
 Compuer Vision 2 Lecure 6 Beond Kalman Filers (09.05.206) leibe@vision.rwh-aachen.de, sueckler@vision.rwh-aachen.de RWTH Aachen Universi, Compuer Vision Group hp://www.vision.rwh-aachen.de Conen of he
Compuer Vision 2 Lecure 6 Beond Kalman Filers (09.05.206) leibe@vision.rwh-aachen.de, sueckler@vision.rwh-aachen.de RWTH Aachen Universi, Compuer Vision Group hp://www.vision.rwh-aachen.de Conen of he
An introduction to the theory of SDDP algorithm
 An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
An inroducion o he heory of SDDP algorihm V. Leclère (ENPC) Augus 1, 2014 V. Leclère Inroducion o SDDP Augus 1, 2014 1 / 21 Inroducion Large scale sochasic problem are hard o solve. Two ways of aacking
Estimation of Poses with Particle Filters
 Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Esimaion of Poses wih Paricle Filers Dr.-Ing. Bernd Ludwig Chair for Arificial Inelligence Deparmen of Compuer Science Friedrich-Alexander-Universiä Erlangen-Nürnberg 12/05/2008 Dr.-Ing. Bernd Ludwig (FAU
Financial Econometrics Kalman Filter: some applications to Finance University of Evry - Master 2
 Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
Financial Economerics Kalman Filer: some applicaions o Finance Universiy of Evry - Maser 2 Eric Bouyé January 27, 2009 Conens 1 Sae-space models 2 2 The Scalar Kalman Filer 2 21 Presenaion 2 22 Summary
Introduction to Mobile Robotics Summary
 Inroducion o Mobile Roboics Summary Wolfram Burgard Cyrill Sachniss Maren Bennewiz Diego Tipaldi Luciano Spinello Probabilisic Roboics 2 Probabilisic Roboics Key idea: Eplici represenaion of uncerainy
Inroducion o Mobile Roboics Summary Wolfram Burgard Cyrill Sachniss Maren Bennewiz Diego Tipaldi Luciano Spinello Probabilisic Roboics 2 Probabilisic Roboics Key idea: Eplici represenaion of uncerainy
Overview. COMP14112: Artificial Intelligence Fundamentals. Lecture 0 Very Brief Overview. Structure of this course
 OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
OMP: Arificial Inelligence Fundamenals Lecure 0 Very Brief Overview Lecurer: Email: Xiao-Jun Zeng x.zeng@mancheser.ac.uk Overview This course will focus mainly on probabilisic mehods in AI We shall presen
Object tracking: Using HMMs to estimate the geographical location of fish
 Objec racking: Using HMMs o esimae he geographical locaion of fish 02433 - Hidden Markov Models Marin Wæver Pedersen, Henrik Madsen Course week 13 MWP, compiled June 8, 2011 Objecive: Locae fish from agging
Objec racking: Using HMMs o esimae he geographical locaion of fish 02433 - Hidden Markov Models Marin Wæver Pedersen, Henrik Madsen Course week 13 MWP, compiled June 8, 2011 Objecive: Locae fish from agging
Object Tracking. Computer Vision Jia-Bin Huang, Virginia Tech. Many slides from D. Hoiem
 Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
Objec Tracking Compuer Vision Jia-Bin Huang Virginia Tech Man slides from D. Hoiem Adminisraive suffs HW 5 (Scene caegorizaion) Due :59pm on Wed November 6 oll on iazza When should we have he final exam?
2.160 System Identification, Estimation, and Learning. Lecture Notes No. 8. March 6, 2006
 2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
2.160 Sysem Idenificaion, Esimaion, and Learning Lecure Noes No. 8 March 6, 2006 4.9 Eended Kalman Filer In many pracical problems, he process dynamics are nonlinear. w Process Dynamics v y u Model (Linearized)
Deep Learning: Theory, Techniques & Applications - Recurrent Neural Networks -
 Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics
Deep Learning: Theory, Techniques & Applicaions - Recurren Neural Neworks - Prof. Maeo Maeucci maeo.maeucci@polimi.i Deparmen of Elecronics, Informaion and Bioengineering Arificial Inelligence and Roboics
FastSLAM 2.0: An Improved Particle Filtering Algorithm for Simultaneous Localization and Mapping that Provably Converges
 Proceedings of IJCAI 2003 FasSLAM 2.0: An Improved Paricle Filering Algorihm for Simulaneous Localizaion and Mapping ha Provably Converges Michael Monemerlo and Sebasian Thrun School of Compuer Science
Proceedings of IJCAI 2003 FasSLAM 2.0: An Improved Paricle Filering Algorihm for Simulaneous Localizaion and Mapping ha Provably Converges Michael Monemerlo and Sebasian Thrun School of Compuer Science
Improved Rao-Blackwellized H filter based mobile robot SLAM
 Ocober 216, 23(5): 47 55 www.sciencedirec.com/science/journal/158885 The Journal of China Universiies of Poss and Telecommunicaions hp://jcup.bup.edu.cn Improved Rao-Blackwellized H filer based mobile
Ocober 216, 23(5): 47 55 www.sciencedirec.com/science/journal/158885 The Journal of China Universiies of Poss and Telecommunicaions hp://jcup.bup.edu.cn Improved Rao-Blackwellized H filer based mobile
GMM - Generalized Method of Moments
 GMM - Generalized Mehod of Momens Conens GMM esimaion, shor inroducion 2 GMM inuiion: Maching momens 2 3 General overview of GMM esimaion. 3 3. Weighing marix...........................................
GMM - Generalized Mehod of Momens Conens GMM esimaion, shor inroducion 2 GMM inuiion: Maching momens 2 3 General overview of GMM esimaion. 3 3. Weighing marix...........................................
CSE-473. A Gentle Introduction to Particle Filters
 CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
CSE-473 A Genle Inroducion o Paricle Filers Bayes Filers for Robo Localizaion Dieer Fo 2 Bayes Filers: Framework Given: Sream of observaions z and acion daa u: d Sensor model Pz. = { u, z2, u 1, z 1 Dynamics
Localization. Mobile robot localization is the problem of determining the pose of a robot relative to a given map of the environment.
 Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Localizaion Mobile robo localizaion is he problem of deermining he pose of a robo relaive o a given map of he environmen. Taxonomy of Localizaion Problem 1 Local vs. Global Localizaion Posiion racking
Math Week 14 April 16-20: sections first order systems of linear differential equations; 7.4 mass-spring systems.
 Mah 2250-004 Week 4 April 6-20 secions 7.-7.3 firs order sysems of linear differenial equaions; 7.4 mass-spring sysems. Mon Apr 6 7.-7.2 Sysems of differenial equaions (7.), and he vecor Calculus we need
Mah 2250-004 Week 4 April 6-20 secions 7.-7.3 firs order sysems of linear differenial equaions; 7.4 mass-spring sysems. Mon Apr 6 7.-7.2 Sysems of differenial equaions (7.), and he vecor Calculus we need
FastSLAM with Stereo Vision
 FasSLAM wih Sereo Vision Wikus Brink Elecronic Sysems Lab Elecrical and Elecronic Engineering Sellenbosch Universiy Email: wikusbrink@ieee.org Corné E. van Daalen Elecronic Sysems Lab Elecrical and Elecronic
FasSLAM wih Sereo Vision Wikus Brink Elecronic Sysems Lab Elecrical and Elecronic Engineering Sellenbosch Universiy Email: wikusbrink@ieee.org Corné E. van Daalen Elecronic Sysems Lab Elecrical and Elecronic
Vehicle Arrival Models : Headway
 Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
Chaper 12 Vehicle Arrival Models : Headway 12.1 Inroducion Modelling arrival of vehicle a secion of road is an imporan sep in raffic flow modelling. I has imporan applicaion in raffic flow simulaion where
References are appeared in the last slide. Last update: (1393/08/19)
") SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
SYSEM IDEIFICAIO Ali Karimpour Associae Professor Ferdowsi Universi of Mashhad References are appeared in he las slide. Las updae: 0..204 393/08/9 Lecure 5 lecure 5 Parameer Esimaion Mehods opics o be
) were both constant and we brought them from under the integral.
 were both constant and we brought them from under the integral.") YIELD-PER-RECRUIT (coninued The yield-per-recrui model applies o a cohor, bu we saw in he Age Disribuions lecure ha he properies of a cohor do no apply in general o a collecion of cohors, which is wha
YIELD-PER-RECRUIT (coninued The yield-per-recrui model applies o a cohor, bu we saw in he Age Disribuions lecure ha he properies of a cohor do no apply in general o a collecion of cohors, which is wha
Probabilistic Robotics Sebastian Thrun-- Stanford
 robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
robabilisic Roboics Sebasian Thrn-- Sanford Inrodcion robabiliies Baes rle Baes filers robabilisic Roboics Ke idea: Eplici represenaion of ncerain sing he calcls of probabili heor ercepion sae esimaion
FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem
 asslam: A acored Soluion o he Simulaneous Localizaion and Mapping Problem Michael Monemerlo and Sebasian hrun School of Compuer Science Carnegie Mellon Universiy Pisburgh, PA 15213 mmde@cs.cmu.edu, hrun@cs.cmu.edu
asslam: A acored Soluion o he Simulaneous Localizaion and Mapping Problem Michael Monemerlo and Sebasian hrun School of Compuer Science Carnegie Mellon Universiy Pisburgh, PA 15213 mmde@cs.cmu.edu, hrun@cs.cmu.edu
Planning in Information Space for a Quadrotor Helicopter in a GPS-denied Environment
 Planning in Informaion Space for a Quadroor Helicoper in a GPS-denied Environmen Ruijie He, Sam Prenice and Nicholas Roy Absrac This paper describes a moion planning algorihm for a quadroor helicoper flying
Planning in Informaion Space for a Quadroor Helicoper in a GPS-denied Environmen Ruijie He, Sam Prenice and Nicholas Roy Absrac This paper describes a moion planning algorihm for a quadroor helicoper flying
Uncertainty & Localization I
 Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Advanced Roboics Uncerain & Localiaion I Moivaion Inrodcion basics represening ncerain Gassian Filers Kalman Filer eended Kalman Filer nscened Kalman Filer Agenda Localiaion Eample For Legged Leage Non-arameric
Kriging Models Predicting Atrazine Concentrations in Surface Water Draining Agricultural Watersheds
 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 Kriging Models Predicing Arazine Concenraions in Surface Waer Draining Agriculural Waersheds Paul L. Mosquin, Jeremy Aldworh, Wenlin Chen Supplemenal Maerial Number
A Bayesian Approach to Spectral Analysis
 Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
Chirped Signals A Bayesian Approach o Specral Analysis Chirped signals are oscillaing signals wih ime variable frequencies, usually wih a linear variaion of frequency wih ime. E.g. f() = A cos(ω + α 2
Elements of Computer Graphics
 CS580: Compuer Graphics Min H. Kim KAIST School of Compuing Elemens of Compuer Graphics Geomery Maerial model Ligh Rendering Virual phoography 2 Foundaions of Compuer Graphics A PINHOLE CAMERA IN 3D 3
CS580: Compuer Graphics Min H. Kim KAIST School of Compuing Elemens of Compuer Graphics Geomery Maerial model Ligh Rendering Virual phoography 2 Foundaions of Compuer Graphics A PINHOLE CAMERA IN 3D 3
Fixed-lag Sampling Strategies for Particle Filtering SLAM
 To appear in he 7 IEEE Inernaional Conference on Roboics & Auomaion (ICRA 7) Fixed-lag Sampling Sraegies for Paricle Filering SLAM Krisopher R. Beevers and Wesley H. Huang Absrac We describe wo new sampling
To appear in he 7 IEEE Inernaional Conference on Roboics & Auomaion (ICRA 7) Fixed-lag Sampling Sraegies for Paricle Filering SLAM Krisopher R. Beevers and Wesley H. Huang Absrac We describe wo new sampling
Mapping in Dynamic Environments
 Mapping in Dynaic Environens Wolfra Burgard Universiy of Freiburg, Gerany Mapping is a Key Technology for Mobile Robos Robos can robusly navigae when hey have a ap. Robos have been shown o being able o
Mapping in Dynaic Environens Wolfra Burgard Universiy of Freiburg, Gerany Mapping is a Key Technology for Mobile Robos Robos can robusly navigae when hey have a ap. Robos have been shown o being able o
Timed Circuits. Asynchronous Circuit Design. Timing Relationships. A Simple Example. Timed States. Timing Sequences. ({r 6 },t6 = 1.
 Timed Circuis Asynchronous Circui Design Chris J. Myers Lecure 7: Timed Circuis Chaper 7 Previous mehods only use limied knowledge of delays. Very robus sysems, bu exremely conservaive. Large funcional
Timed Circuis Asynchronous Circui Design Chris J. Myers Lecure 7: Timed Circuis Chaper 7 Previous mehods only use limied knowledge of delays. Very robus sysems, bu exremely conservaive. Large funcional
Lab #2: Kinematics in 1-Dimension
 Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
CONTROL SYSTEMS, ROBOTICS AND AUTOMATION Vol. XI Control of Stochastic Systems - P.R. Kumar
 CONROL OF SOCHASIC SYSEMS P.R. Kumar Deparmen of Elecrical and Compuer Engineering, and Coordinaed Science Laboraory, Universiy of Illinois, Urbana-Champaign, USA. Keywords: Markov chains, ransiion probabiliies,
CONROL OF SOCHASIC SYSEMS P.R. Kumar Deparmen of Elecrical and Compuer Engineering, and Coordinaed Science Laboraory, Universiy of Illinois, Urbana-Champaign, USA. Keywords: Markov chains, ransiion probabiliies,
Performance comparison of EKF and particle filtering methods for maneuvering targets
 Digial Signal Processing 17 (2007) 774 786 www.elsevier.com/locae/dsp Performance comparison of EKF and paricle filering mehods for maneuvering arges Mónica F. Bugallo, Shanshan Xu, Pear M. Djurić Deparmen
Digial Signal Processing 17 (2007) 774 786 www.elsevier.com/locae/dsp Performance comparison of EKF and paricle filering mehods for maneuvering arges Mónica F. Bugallo, Shanshan Xu, Pear M. Djurić Deparmen
hen found from Bayes rule. Specically, he prior disribuion is given by p( ) = N( ; ^ ; r ) (.3) where r is he prior variance (we add on he random drif
 = N( ; ^ ; r ) (.3) where r is he prior variance (we add on he random drif") Chaper Kalman Filers. Inroducion We describe Bayesian Learning for sequenial esimaion of parameers (eg. means, AR coeciens). The updae procedures are known as Kalman Filers. We show how Dynamic Linear
Chaper Kalman Filers. Inroducion We describe Bayesian Learning for sequenial esimaion of parameers (eg. means, AR coeciens). The updae procedures are known as Kalman Filers. We show how Dynamic Linear
Chapter 2. Models, Censoring, and Likelihood for Failure-Time Data
 Chaper 2 Models, Censoring, and Likelihood for Failure-Time Daa William Q. Meeker and Luis A. Escobar Iowa Sae Universiy and Louisiana Sae Universiy Copyrigh 1998-2008 W. Q. Meeker and L. A. Escobar. Based
Chaper 2 Models, Censoring, and Likelihood for Failure-Time Daa William Q. Meeker and Luis A. Escobar Iowa Sae Universiy and Louisiana Sae Universiy Copyrigh 1998-2008 W. Q. Meeker and L. A. Escobar. Based
Motion Planning under Uncertainty using Iterative Local Optimization in Belief Space
 Moion Planning under Uncerainy using Ieraive Local Opimizaion in Belief Space Jur van den Berg 1 Sachin Pail 2 Ron Aleroviz 2 1 School of Compuing, Universiy of Uah, berg@cs.uah.edu. 2 Dep. of Compuer
Moion Planning under Uncerainy using Ieraive Local Opimizaion in Belief Space Jur van den Berg 1 Sachin Pail 2 Ron Aleroviz 2 1 School of Compuing, Universiy of Uah, berg@cs.uah.edu. 2 Dep. of Compuer
Monocular SLAM Using a Rao-Blackwellised Particle Filter with Exhaustive Pose Space Search
 2007 IEEE Inernaional Conference on Roboics and Auomaion Roma, Ialy, 10-14 April 2007 Monocular SLAM Using a Rao-Blackwellised Paricle Filer wih Exhausive Pose Space Search Masahiro Tomono Absrac This
2007 IEEE Inernaional Conference on Roboics and Auomaion Roma, Ialy, 10-14 April 2007 Monocular SLAM Using a Rao-Blackwellised Paricle Filer wih Exhausive Pose Space Search Masahiro Tomono Absrac This
Time series model fitting via Kalman smoothing and EM estimation in TimeModels.jl
 Time series model fiing via Kalman smoohing and EM esimaion in TimeModels.jl Gord Sephen Las updaed: January 206 Conens Inroducion 2. Moivaion and Acknowledgemens....................... 2.2 Noaion......................................
Time series model fiing via Kalman smoohing and EM esimaion in TimeModels.jl Gord Sephen Las updaed: January 206 Conens Inroducion 2. Moivaion and Acknowledgemens....................... 2.2 Noaion......................................
Efficient Optimization of Information-Theoretic Exploration in SLAM
 Proceedings of he Tweny-Third AAAI Conference on Arificial Inelligence (2008) Efficien Opimizaion of Informaion-Theoreic Exploraion in SLAM Thomas Kollar and Nicholas Roy Compuer Science and Arificial
Proceedings of he Tweny-Third AAAI Conference on Arificial Inelligence (2008) Efficien Opimizaion of Informaion-Theoreic Exploraion in SLAM Thomas Kollar and Nicholas Roy Compuer Science and Arificial
Non-parametric techniques. Instance Based Learning. NN Decision Boundaries. Nearest Neighbor Algorithm. Distance metric important
 on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LDA, logisic
on-parameric echniques Insance Based Learning AKA: neares neighbor mehods, non-parameric, lazy, memorybased, or case-based learning Copyrigh 2005 by David Helmbold 1 Do no fi a model (as do LDA, logisic
Recursive Least-Squares Fixed-Interval Smoother Using Covariance Information based on Innovation Approach in Linear Continuous Stochastic Systems
 8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
8 Froniers in Signal Processing, Vol. 1, No. 1, July 217 hps://dx.doi.org/1.2266/fsp.217.112 Recursive Leas-Squares Fixed-Inerval Smooher Using Covariance Informaion based on Innovaion Approach in Linear
FastSLAM: An Efficient Solution to the Simultaneous Localization And Mapping Problem with Unknown Data Association
 FasSLAM: An Efficien Soluion o he Simulaneous Localizaion And Mapping Problem wih Unknown Daa Associaion Sebasian Thrun 1, Michael Monemerlo 1, Daphne Koller 1, Ben Wegbrei 1 Juan Nieo 2, and Eduardo Nebo
FasSLAM: An Efficien Soluion o he Simulaneous Localizaion And Mapping Problem wih Unknown Daa Associaion Sebasian Thrun 1, Michael Monemerlo 1, Daphne Koller 1, Ben Wegbrei 1 Juan Nieo 2, and Eduardo Nebo
AUV positioning based on Interactive Multiple Model
 AUV posiioning based on Ineracive Muliple Model H. Q. Liu ARL, Tropical Marine Science Insiue Naional Universiy of Singapore 18 Ken Ridge Road, Singapore 1197 Email: hongqing@arl.nus.edu.sg Mandar Chire
AUV posiioning based on Ineracive Muliple Model H. Q. Liu ARL, Tropical Marine Science Insiue Naional Universiy of Singapore 18 Ken Ridge Road, Singapore 1197 Email: hongqing@arl.nus.edu.sg Mandar Chire
Modal identification of structures from roving input data by means of maximum likelihood estimation of the state space model
 Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
Modal idenificaion of srucures from roving inpu daa by means of maximum likelihood esimaion of he sae space model J. Cara, J. Juan, E. Alarcón Absrac The usual way o perform a forced vibraion es is o fix
FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem
 rom: AAAI-02 Proceedings. Copyrigh 2002, AAAI (www.aaai.org). All righs reserved. asslam: A acored Soluion o he Simulaneous Localizaion and Mapping Problem Michael Monemerlo and Sebasian hrun School of
rom: AAAI-02 Proceedings. Copyrigh 2002, AAAI (www.aaai.org). All righs reserved. asslam: A acored Soluion o he Simulaneous Localizaion and Mapping Problem Michael Monemerlo and Sebasian hrun School of
Principal Component Analysis)
") 1 shirai@ci.risumei.ac.jp @ jp www.i.ci.risumei.ac.jp/~shirai/ Principal Componen Analysis) n p i i,...,, =1,2 x φ x 3 i T i x z φ = φ 2 φ 3 φ 1 x 2 n s n i i T / 1 2 2 = = x φ x 1 φ φ φ φ φ ) / ( ) /
1 shirai@ci.risumei.ac.jp @ jp www.i.ci.risumei.ac.jp/~shirai/ Principal Componen Analysis) n p i i,...,, =1,2 x φ x 3 i T i x z φ = φ 2 φ 3 φ 1 x 2 n s n i i T / 1 2 2 = = x φ x 1 φ φ φ φ φ ) / ( ) /
On Solving the Perturbed Multi- Revolution Lambert Problem: Applications in Enhanced SSA
 On Solving he Perurbed Muli- Revoluion Lamber Problem: Applicaions in Enhanced SSA John L. Junkins and Robyn M. Woollands Texas A&M Universiy Presened o Sacie Williams (AFOSR/RT) AFOSR REMOTE SENSING PORTFOLIO
On Solving he Perurbed Muli- Revoluion Lamber Problem: Applicaions in Enhanced SSA John L. Junkins and Robyn M. Woollands Texas A&M Universiy Presened o Sacie Williams (AFOSR/RT) AFOSR REMOTE SENSING PORTFOLIO
Robotics I. April 11, The kinematics of a 3R spatial robot is specified by the Denavit-Hartenberg parameters in Tab. 1.
 Roboics I April 11, 017 Exercise 1 he kinemaics of a 3R spaial robo is specified by he Denavi-Harenberg parameers in ab 1 i α i d i a i θ i 1 π/ L 1 0 1 0 0 L 3 0 0 L 3 3 able 1: able of DH parameers of
Roboics I April 11, 017 Exercise 1 he kinemaics of a 3R spaial robo is specified by he Denavi-Harenberg parameers in ab 1 i α i d i a i θ i 1 π/ L 1 0 1 0 0 L 3 0 0 L 3 3 able 1: able of DH parameers of
Filtering Turbulent Signals Using Gaussian and non-gaussian Filters with Model Error
 Filering Turbulen Signals Using Gaussian and non-gaussian Filers wih Model Error June 3, 3 Nan Chen Cener for Amosphere Ocean Science (CAOS) Couran Insiue of Sciences New York Universiy / I. Ouline Use
Filering Turbulen Signals Using Gaussian and non-gaussian Filers wih Model Error June 3, 3 Nan Chen Cener for Amosphere Ocean Science (CAOS) Couran Insiue of Sciences New York Universiy / I. Ouline Use
Modeling of vision based robot formation control using fuzzy logic controller and extended Kalman filter
 Inernaional Journal of Fuzzy Logic and Inelligen Sysems, vol. 2, no. 3, Sepember 22, pp. 238-244 hp://dx.doi.org/.539/ijfis.22.2.3.238 pissn 598-2645 eissn 293-744X Modeling of vision based robo formaion
Inernaional Journal of Fuzzy Logic and Inelligen Sysems, vol. 2, no. 3, Sepember 22, pp. 238-244 hp://dx.doi.org/.539/ijfis.22.2.3.238 pissn 598-2645 eissn 293-744X Modeling of vision based robo formaion
Look-ahead Proposals for Robust Grid-based SLAM
 Look-ahead Proposals for Robus Grid-based SLAM Slawomir Grzonka, Chrisian Plagemann, Giorgio Grisei, Wolfram Burgard To cie his version: Slawomir Grzonka, Chrisian Plagemann, Giorgio Grisei, Wolfram Burgard.
Look-ahead Proposals for Robus Grid-based SLAM Slawomir Grzonka, Chrisian Plagemann, Giorgio Grisei, Wolfram Burgard To cie his version: Slawomir Grzonka, Chrisian Plagemann, Giorgio Grisei, Wolfram Burgard.
An Efficient Hierarchical Localization for Indoor Mobile Robot with Wireless Sensor and Pre-Constructed Map
 The 5h Inernaional Conference on Ubiquious Robos and Ambien Inelligence (URAI 2008) An Efficien Hierarchical Localizaion for Indoor Mobile Robo wih Wireless Sensor and Pre-Consruced Map Chi-Pang Lam 1
The 5h Inernaional Conference on Ubiquious Robos and Ambien Inelligence (URAI 2008) An Efficien Hierarchical Localizaion for Indoor Mobile Robo wih Wireless Sensor and Pre-Consruced Map Chi-Pang Lam 1